Armando Bellini
Elettronica
industriale 2
Azionamenti con motore
in corrente alternata
ARACNE
Copyright © MMVI
ARACNE editrice S.r.l.
www.aracneeditrice.it
[email protected]
via Raffaele Garofalo, 133 A/B
00173 Roma
(06) 93781065
ISBN
88–548–0878–4
I diritti di traduzione, di memorizzazione elettronica,
di riproduzione e di adattamento anche parziale,
con qualsiasi mezzo, sono riservati per tutti i Paesi.
Non sono assolutamente consentite le fotocopie
senza il permesso scritto dell’Editore.
I edizione: novembre 2006
Indice
Elenco delle figure
Elenco delle tabelle
ix
xvii
Introduzione
1
I
3
1
Argomenti preliminari
Introduzione agli Azionamenti Elettrici
2
5
1.1
Caratterizzazione del carico meccanico
1.2
Classificazione sulla base del comportamento
dinamico
Schematizzazione bifase equivalente
2.1
8
11
15
Schematizzazione bifase di un avvolgimento
trifase
16
2.2
Interpretazione fisica
22
2.3
Approccio sistemistico
28
2.4
Alimentazione con una terna trifase di tensioni sinusoidali
33
i
ii
3
Indice
Alimentazione di un avvolgimento trifase
37
3.1
Convertitore c.a.-c.a. a controllo di fase
38
3.2
Inverter a tensione impressa
40
3.3
Inverter a corrente impressa
46
3.4
Cicloconvertitore
49
3.5
Convertitore a matrice
52
3.6
Inverter commutato da rete
53
3.7
Alimentazione in corrente
54
3.8
Tecniche di modulazione
56
3.8.1
3.8.2
4
5
57
Tecniche di modulazione implementate su dispositivi a microprocessore
70
Motori in c.a.
4.1
II
Tecniche di modulazione implementate su dispositivi analogici
81
Impiego dei motori in c.a. negli azionamenti
industriali
82
4.2
Motore asincrono
85
4.3
Motore sincrono
86
Motore Asincrono
Modelli del Motore Asincrono Trifase
5.1
89
91
Schematizzazione con assi α e β fissi con lo
statore
92
5.2
Schematizzazione con assi d e q rotanti
98
5.3
Schematizzazione con variabili complesse
101
Indice
5.4
6
iii
Modelli in forma di stato
Comportamento statico del motore asincrono
109
6.1
Caratteristiche statiche con alimentazione sinusoidale
110
6.2
Effetti dovuti alla alimentazione non sinusoidale
6.2.1
6.2.2
7
120
Alimentazione con inverter a tensione
impressa
121
Alimentazione con inverter a corrente
impressa
128
Modelli linearizzati del motore asincrono
7.1
133
Alimentazione a tensione impressa
7.1.1
7.1.2
7.1.3
7.2
8
104
134
Linearizzazione attorno ad un punto
di lavoro
135
Approssimazione delle funzioni di trasferimento
140
Stabilità
152
Alimentazione a corrente impressa
159
Modalità di controllo del motore asincrono trifase
8.1
165
Controllo sullo statore
165
8.1.1
Controllo in tensione
166
8.1.2
Controllo in frequenza
169
iv
Indice
8.1.3
8.1.4
8.2
9
Controllo di scorrimento con alimentazione a corrente impressa
170
Controllo ad orientamento di campo
170
Controllo sul rotore
171
Controllo in frequenza
181
9.1
Introduzione al controllo in frequenza
182
9.2
Legge di variazione della tensione di alimentazione
184
9.3
Struttura del sistema di controllo
192
9.4
Controllo di scorrimento
196
10 Controllo di scorrimento a corrente impressa
199
10.1 Caratteristiche statiche
200
10.2 Comportamento dinamico
203
10.3 Struttura del sistema di controllo
207
10.3.1 Alimentazione con inverter a corrente
impressa
208
10.3.2 Alimentazione con inverter a tensione
impressa
218
11 Controllo ad orientamento di campo
221
11.1 Principio del controllo ad orientamento di campo
222
11.2 Controllo ad orientamento di campo di tipo
diretto
228
Indice
v
11.3 Controllo ad orientamento di campo di tipo
indiretto
11.3.1 Effetti delle variazioni parametriche
228
232
11.3.2 Approcci utilizzati per determinare la
costante di tempo rotorica
241
11.4 Controllo vettoriale orientato secondo il flusso
statorico
244
11.5 Inseguimento delle componenti della corrente
statorica
245
11.5.1 Alimentazione con inverter a corrente
impressa
245
11.5.2 Alimentazione con inverter a tensione
impressa
246
11.6 Tecniche di modulazione
258
12 Determinazione delle componenti del
flusso
269
12.1 Modelli utilizzati
270
12.2 Principali approcci utilizzati
272
12.2.1 Integrazione delle equazioni rotoriche
273
12.2.2 Integrazione delle equazioni
statoriche
273
12.2.3 Osservatori dello stato
274
12.3 Osservatori deterministici
275
12.3.1 Osservatori di ordine pieno
275
12.3.2 Osservatori di ordine ridotto
279
12.3.3 Osservatori adattativi
292
vi
Indice
12.4 Osservatori stocastici
298
12.4.1 Osservatori di ordine pieno
298
12.4.2 Osservatori di ordine ridotto
300
12.4.3 Osservatori di ordine ridotto con filtro
di Kalman ritardato
12.5 Sensibilità alle variazioni parametriche
12.5.1 Impostazione generale
303
308
308
12.5.2 Integrazione delle equazioni statoriche
o rotoriche
313
12.5.3 Impiego degli osservatori deterministici
316
12.5.4 Confronti
320
13 Altre tecniche di controllo
327
13.1 DSC
328
13.2 DTC
334
14 Azionamenti sensorless
14.1 Determinazione della velocità di rotazione
343
344
14.1.1 Calcolo della velocità come differenza
tra velocità di sincronismo e pulsazione di scorrimento
345
14.1.2 Impiego di un osservatore adattativo
con modello di ordine pieno
350
14.1.3 Impiego di un osservatore adattativo
con modello di riferimento
350
14.1.4 Impiego di un filtro di Kalman esteso
351
14.1.5 Misura dell’effetto dell’alternanza di
denti e cave rotoriche
352
Indice
vii
14.2 Azionamenti sensorless con controllo vettoriale
15 Determinazione dei parametri
15.1 Procedure fuori linea
355
356
15.1.1 Procedure che richiedono una rotazione del motore
357
15.1.2 Procedure applicabili a rotore fermo
358
15.2 Procedure in linea
III
353
Motore Sincrono
16 Modelli della macchina sincrona
16.1 Modelli dinamici
371
375
377
378
16.1.1 Motori a magneti permanenti
382
16.1.2 Motori a riluttanza variabile
383
16.2 Comportamento a regime permanente
17 Azionamenti con motore sincrono
384
393
17.1 Controllo in frequenza del motore sincrono
393
17.2 Controllo vettoriale del motore sincrono
396
17.2.1 Azionamenti con motore a magneti
permanenti
398
17.2.2 Azionamenti con motore a rotore avvolto e convertitore a commutazione
forzata
414
17.2.3 Azionamenti con motore a rotore avvolto e convertitore a commutazione
naturale
418
viii
Indice
18 Azionamenti sensorless
421
18.1 Stima delle componenti del flusso statorico
422
18.2 Impiego di un filtro di Kalman esteso
423
18.3 Approcci basati sulla saturazione del circuito
magnetico
424
18.4 Approcci basati sull’anisotropia del circuito
magnetico
18.4.1 Metodi basati sulla misura delle induttanze degli avvolgimenti
statorici
18.4.2 Metodi basati sulla iniezione di correnti ad alta frequenza
425
426
427
Elenco delle figure
1.1
Struttura di un azionamento elettrico.
6
1.2
Modello linearizzato del carico.
10
2.1
Parametri dell’avvolgimento trifase.
16
2.2
Avvolgimento bifase equivalente.
20
2.3
Avvolgimento trifase.
22
2.4
Proiezione del vettore x sugli assi α e β.
24
2.5
Schematizzazione con riferimenti rotanti.
25
3.1
Convertitore c.a.-c.a. a controllo di fase.
39
3.2
Tensioni applicate alle tre fasi di un carico puramente resistivo.
39
Soluzioni circuitali per ridurre il numero dei raddrizzatori controllati.
40
3.4
Inverter a tensione impressa.
41
3.5
Andamenti delle tensioni fornite dall’inverter.
42
3.6
Vettori di tensione.
44
3.7
Inverter a corrente impressa.
47
3.8
Andamenti delle tre correnti di fase.
48
3.9
Vettori di corrente.
48
3.3
ix
x
Elenco delle figure
3.10
Cicloconvertitore trifase con connessione a stella.
50
3.11
Cicloconvertitore trifase con connessione a triangolo
aperto.
51
Cicloconvertitore trifase con convertitori a due quadranti.
51
3.13
Convertitore a matrice.
53
3.14
Alimentazione in corrente; tre anelli di controllo.
55
3.15
Alimentazione in corrente; due soli anelli di controllo.
56
3.16
Modulazione a sottooscillazione.
57
3.17
Forme d’onda relative ad una fase dell’inverter.
58
3.18
Ampiezze delle prime armoniche.
64
3.19
Andamenti delle prime k + 2 armoniche al variare
del rapporto di modulazione.
67
Andamenti delle prime 2k + 1 armoniche; k intero
multiplo di tre.
68
3.21
Modulante con terza armonica.
70
3.22
Forma d’onda campionata non simmetrica.
72
3.23
Forma d’onda campionata simmetrica.
73
3.24
Andamenti delle prime armoniche con campionamento uniforme.
73
3.25
Modulazione nel primo dodicesimo di periodo.
75
3.26
Andamenti dell’indice di qualità per i tre diversi tipi
di forma d’onda.
79
5.1
Scema elettrico del motore asincrono trifase.
93
5.2
Schematizzazione bifase dei due avvolgimenti.
93
5.3
Schematizzazione bifase; assi fissi con lo statore.
94
3.12
3.20
Elenco delle figure
5.4
Schematizzazione bifase; assi rotanti con velocità
ωa .
xi
99
5.5
Circuito equivalente con variabili complesse.
104
5.6
Circuito equivalente con variabili reali.
105
6.1
Circuito monofase equivalente della macchina asincrona.
111
6.2
Modifica del circuito equivalente.
112
6.3
Caratteristica statica coppia-velocità.
115
6.4
Caratteristica statica corrente-velocità.
116
6.5
Caratteristica rendimento-velocità.
118
6.6
Caratteristica statica completa.
118
6.7
Caratteristica statica di un motore a doppia gab-
6.8
7.1
bia.
120
Andamento temporale della coppia elettromagnetica.
130
Schema a blocchi funzionale del modello linearizzato.
138
7.2
Linearizzazione attorno a scorrimento nullo.
147
7.3
Linearizzazione attorno allo scorrimento nominale
Ωsn .
148
7.4
Linearizzazione attorno a −Ωsn .
149
7.5
Risposte indiciali di G3 (s) e G3 (s) per Ωs = Ω∗s .
151
7.6
Risposte indiciali di G3 (s) e G
3 (s) per Ωs = Ωsn .
151
7.7
Tipica zona di instabilità di un motore asincrono
7.8
alimentato a tensione impressa.
153
Schema a blocchi utilizzato per valutare la stabilità.
154
xii
Elenco delle figure
7.9
Luogo delle radici.
8.1
Caratteristiche statiche al variare dell’ampiezza della tensione.
8.2
154
167
Caratteristiche statiche di un motore con elevata
resistenza rotorica.
168
8.3
Schema di principio del controllo rotorico.
172
8.4
Caratteristiche statiche al variare della resistenza
esterna.
174
8.5
Semplice realizzazione di una resistenza variabile.
175
8.6
Soluzione alternativa per ottenere una resistenza
variabile.
175
8.7
Soluzione con convertitore statico.
177
8.8
Soluzione con recupero dell’energia rotorica.
178
8.9
Caratteristiche coppia-velocità al variare dell’angolo α.
179
9.1
Caratteristiche statiche con Vs = KΩa .
183
9.2
Caratteristiche statiche con Vs = KΩa .
185
9.3
Caratteristiche statiche con Vs = KΩa .
186
9.4
Caratteristiche statiche con Vs = KΩa + Vso .
187
9.5
Dipendenza di Vs da Ωa e da Ωs .
188
9.6
Caratteristiche statiche con Vs = KΩa + Ks Ωs .
189
9.7
Alimentazione a tensione massima.
191
9.8
Andamenti della coppia massima e di quella nominale.
192
9.9
Struttura del controllo in frequenza.
193
9.10
Modello linearizzato di un azionamento con controllo in frequenza.
193
Elenco delle figure
xiii
9.11
Modifica del modello linearizzato.
194
9.12
Struttura dell’azionamento con controllo di scorrimento.
9.13
196
Schema a blocchi linearizzato dell’azionamento con
controllo di scorrimento.
197
Schema a blocchi linearizzato quando la velocità è
inferiore alla velocità base.
197
Caratteristiche statiche coppia e corrente al variare
della pulsazione di scorrimento.
202
10.2
Andamenti della coppia e del flusso rotorico.
206
10.3
Schema a blocchi dell’azionamento con inverter a
corrente impressa.
210
10.4
Costante di tempo sul riferimento di corrente.
211
10.5
Azione derivativa per ottenere una risposta istanta-
9.14
10.1
nea della coppia .
212
10.6
Variazione istantanea dell’angolo θd .
213
10.7
Andamento dell’errore di fase.
215
10.8
Schema a blocchi del circuito di modulazione.
217
10.9
Andamenti delle principali grandezze.
218
11.1
Schema di principio del controllo ad orientamento
di campo.
226
Controllo ad orientamento di campo di tipo indiretto.
230
11.3
Determinazione dell’angolo di campo.
230
11.4
Effetti delle variazioni di Rr su flusso e coppia.
238
11.5
Effetti delle variazioni di LM su flusso e coppia.
239
11.2
xiv
11.6
Elenco delle figure
Effetti delle variazioni parametriche sulla tensione
di alimentazione.
240
11.7
Inseguimento con modulazione Δ.
247
11.8
Inseguimento con modulazione a campionamento
uniforme.
250
11.9
Inseguimento con due soli anelli di regolazione.
251
11.10
Inseguimento con grandezze riferite agli assi rotanti.
252
Inseguimento con disaccoppiamento tra gli assi d e
q.
255
11.12
Modulazione a sottooscillazione.
259
11.13
Vettori rappresentativi e stati di conduzione adiacenti.
262
11.14
Costruzione del vettore v des .
263
12.1
Struttura dell’osservatore di ordine pieno.
276
12.2
Struttura a controreazione dell’osservatore di ordine
ridotto.
288
12.3
Struttura dell’osservatore adattativo.
293
12.4
Osservatore adattativo con modello di riferimento.
297
12.5
Coefficienti di sensibilità alle variazioni di Rr .
321
12.6
Coefficienti di sensibilità alle variazioni di Rs .
321
12.7
Coefficienti di sensibilità alle variazioni di LM .
322
12.8
Coefficienti di sensibilità alle variazioni di Lσ .
322
12.9
Coefficienti di sensibilità alle variazioni di Rr .
323
12.10
Coefficienti di sensibilità alle variazioni di Rs .
323
12.11
Coefficienti di sensibilità alle variazioni di LM .
324
12.12
Coefficienti di sensibilità alle variazioni di Lσ .
324
11.11
Elenco delle figure
12.13
12.14
Coefficienti di sensibilità agli errori di misura della
tensione.
xv
325
Coefficienti di sensibilità agli errori di misura della
corrente.
325
13.1
Andamenti delle tensioni e dei flussi di statore.
330
13.2
Traiettoria del vettore del flusso nel piano α, β.
331
13.3
Forme d’onda modulate.
332
13.4
Schema a blocchi della tecnica di controllo DSC.
333
13.5
Vettori di tensione.
335
13.6
Suddivisione del piano α-β in 6 settori angolari.
336
15.1
Stima della corrente statorica.
363
15.2
Sistema adattativo per l’identificazione dei parametri.
364
15.3
Forma d’onda della corrente applicata al motore.
366
16.1
Definizione dell’angolo δ.
387
16.2
Andamento della coppia elettromagnetica al variare
16.3
17.1
17.2
17.3
17.4
di δ.
388
Caratteristica statica di una macchina sincrona autoavviante.
390
Andamenti della coppia e del modulo della tensione
al variare di θ.
401
Diagrammi polari nel funzionamento da motore (a)
e in quello da generatore (b).
402
Diagrammi polari nel funzionamento da motore (a)
e in quello da generatore (b).
407
Curve di coppia al variare di θ.
412
xvi
17.5
17.6
17.7
Elenco delle figure
Andamenti della coppia e del modulo della tensione
al variare di θ.
Valori massimi della tensione di statore, della coppia elettromagnetica e della potenza, al variare della
velocità.
Impiego di un motore asincrono a rotore avvolto.
413
416
417
Elenco delle tabelle
11.1 Stati di conduzione e tensioni di uscita.
11.2 Sequenze e durate dei subintervalli.
261
266
xvii
Introduzione
In seguito alla Riforma Universitaria e all’introduzione dei Crediti Formativi, il corso di Elettronica Industriale, impartito presso
la Facoltà di Ingegneria dell’Università di Roma “Tor Vergata”, è
stato suddiviso in due moduli: Elettronica Industriale 1 e 2. Nel
primo corso, frequentato da tutti gli studenti che seguono Elettronica Industriale 2, viene dapprima presentata una classificazione degli
Azionamenti Elettrici, che tiene conto di vari aspetti funzionali quali il tipo di carico, il comportamento dinamico, il tipo di variabile
controllata. Successivamente, dopo una breve illustrazione dei vari
motori elettrici impiegati negli azionamenti industriali, è effettuata
una dettagliata trattazione sugli azionamenti con motore in corrente
continua, riservando solo alcuni cenni agli azionamenti con motori
in corrente alternata, la cui trattazione risulta alquanto più complessa. Il secondo corso, che utilizza questo testo, prende, invece,
in considerazione gli azionamenti con motori in corrente alternata,
limitandosi agli azionamenti più diffusi, che impiegano macchine di
tipo asincrono o sincrono; tuttavia alcuni concetti fondamentali, relativi alle peculiarità degli Azionamenti Elettrici, verranno ripetuti
nel primo capitolo, per rendere il testo accessibile anche a chi non
avesse frequentato il primo corso.
1
2
Introduzione
Organizzazione generale. Lo studio del comportamento statico
e dinamico dei motori in c.a. è più complesso e laborioso di quello
dei motori in c.c. e, per ottenere dei modelli facilmente utilizzabili,
è necessario assumere alcune ipotesi semplificative, che consistono
nel trascurare le eventuali anisotropie presenti nel circuito magnetico, nel considerare il circuito magnetico lineare e nel supporre che
tutte le perdite siano dovute solo alle correnti che circolano nei circuiti di statore e di rotore della macchina (si trascurano, quindi, le
perdite localizzate nel ferro della macchina). Risulta, inoltre, conveniente ricorrere ad una schematizzazione bifase equivalente, che
permette una ulteriore semplificazione delle equazioni differenziali
che descrivono il comportamento dinamico della macchina. Il libro
è suddiviso in tre parti. La prima parte presenta alcuni argomenti preliminari ed, in particolare, una introduzione agli azionamenti
elettrici, la schematizzazione bifase equivalente, i problemi connessi
alla alimentazione di un avvolgimento trifase mediante convertitore
statico ed una breve descrizione dei due motori in c.a. maggiormente utilizzati negli azionamenti elettrici. La seconda parte, più consistente, tratta i problemi connessi agli azionamenti che impiegano un
motore asincrono. L’ultima parte, infine, prende in considerazione
gli azionamenti con motore sincrono.
Parte I
Argomenti preliminari
Capitolo 1
Classificazione degli
Azionamenti Elettrici
Si definisce azionamento un sistema capace di controllare il moto
di un organo meccanico (carico). Ogni azionamento comprende,
quindi, un dispositivo di potenza (attuatore) capace di produrre
il lavoro meccanico connesso al moto. Tale attuatore può essere
idraulico, pneumatico o elettrico.
Si definisce azionamento elettrico un azionamento che impiega un attuatore elettrico, ossia una macchina elettrica, solitamente
funzionante da motore, nella quale avviene una conversione di energia da elettrica a meccanica. Un azionamento elettrico è, quindi,
un apparato che, alimentato da una sorgente di energia elettrica
e opportunamente controllato, eroga potenza meccanica con velocità e coppia adeguate alla movimentazione prevista per il carico
meccanico.
5
6
Capitolo 1. Classificazione degli Azionamenti Elettrici
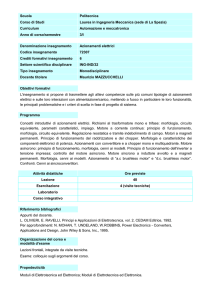
Come mostrato nella Fig. 1.1, un azionamento elettrico è costituito da:
• un motore elettrico, che fornisce energia al carico;
• un convertitore statico, che alimenta il motore;
• un dispositivo di comando del convertitore;
• un dispositivo di controllo dell’azionamento.
Molto spesso, specialmente quando il dispositivo di controllo dell’azionamento è realizzato impiegando microprocessori, questo contiene anche la parte di segnale del dispositivo di comando
del convertitore, che si riduce ad un semplice sistema di adattamento ed amplificazione. Risulta, comunque, conveniente, al fine di facilitarne la comprensione, esaminare separatamente le due
funzioni.
L’azionamento è connesso al carico o in maniera diretta oppure,
più usualmente, mediante un riduttore meccanico. Gli azionamenti
con accoppiamento diretto sono, a seconda dell’applicazione nella
quale sono inseriti, indicati come: Direct Drive (robotica), Gearless
(ascensori), Motor Spindle o Elettromandrino (macchine utensili).
Dispositivo di
controllo
dell’azionamento
Dispositivo di
comando
del convertitore
Convertitore
statico
Motore
elettrico
Azionamento elettrico
Figura 1.1: Struttura di un azionamento elettrico.
Carico
7
Il riduttore meccanico è in genere costituito o da una vite senza fine
o da una sequenza di ingranaggi oppure da un sistema di pulegge;
altri accoppiamenti, più costosi, impiegano un riduttore epicicloidale o un riduttore armonico. Alcuni riduttori presentano un elevato
livello di rigidità, altri, invece, sono caratterizzati da un discreto grado di elasticità; un’ulteriore elasticità può venire introdotta
dalla presenza di un albero di trasmissione.
Una prima classificazione degli azionamenti elettrici, può essere
effettuata sulla base delle caratteristiche costruttive e funzionali del
motore utilizzato; una seconda, più significativa, prende, invece, in
considerazione le peculiarità della modalità di controllo impiegata
e caratterizza l’azionamento sulla base delle prestazioni dinamiche
ottenibili.
I tradizionali azionamenti con motore in c.c. hanno caratteristiche dinamiche alquanto modeste; ciò è dovuto non tanto alle
peculiarità del motore, quanto a quelle dei convertitori c.a.-c.c. utilizzati per la loro alimentazione. La modesta dinamica, ottenibile
impiegando un azionamento con motore in c.c., ha portato ad utilizzare modalità di controllo dell’azionamento estremamente semplici, essenzialmente basate sull’impiego di regolatori di tipo P.I.,
e ad effettuare una suddivisione tra i diversi tipi di azionamento,
prendendo in considerazione essenzialmente le loro caratteristiche
di impiego. A tale scopo, si è ricorsi ad una suddivisione degli
azionamenti in due classi: azionamenti di posizione e azionamenti
di velocità, a seconda del tipo di grandezza meccanica controllata. I primi, il cui esempio tipico è rappresentato dagli azionamenti
per assi di macchine utensili o dagli azionamenti per robotica, sono
caratterizzati dall’esigenza di disporre di una coppia massima pra-
8
Capitolo 1. Classificazione degli Azionamenti Elettrici
ticamente costante in un ampio campo di variazione della velocità.
Nei secondi, il cui esempio tipico è rappresentato dagli azionamenti per mandrini di macchine utensili, è, invece, di fondamentale
importanza disporre di una zona di funzionamento a potenza massima costante la più estesa possibile. Oltre che da diverse zone di
funzionamento, le due famiglie di azionamenti sono caratterizzate
da diverse specifiche funzionali. Praticamente tutti gli azionamenti
della prima famiglia necessitano di una elevata precisione di regolazione sia statica che dinamica. La seconda famiglia risulta, nell’insieme, meno caratterizzata; vi sono, infatti, applicazioni nelle quali
l’azionamento di velocità deve solo opporsi a disturbi tendenti a
variarne la velocità di rotazione (si pensi, ad esempio al mandrino
di un tornio tradizionale o ad un laminatoio non reversibile), altre
(come ad esempio il mandrino di una moderna macchina utensile
a controllo numerico oppure un laminatoio reversibile) nelle quali,
invece, risulta importante la risposta a variazioni del riferimento di
velocità.
Negli azionamenti che richiedono prestazioni dinamiche più elevate di quelli tradizionali, per sfruttare appieno le prestazioni fornibili dall’azionamento non è sufficiente effettuare una suddivisione così semplicistica delle esigenze operative ma risulta necessario
effettuare un’analisi più dettagliata del comportamento del carico.
1.1
Caratterizzazione del carico meccanico
Il comportamento del carico meccanico è praticamente sempre di
tipo non lineare, basti pensare all’attrito di primo distacco e al-
1.1. Caratterizzazione del carico meccanico
9
l’insorgere di movimenti d’aria, che producono coppie resistenti di
valore dipendente dal quadrato della velocità; spesso, però, si effettua una implicita o esplicita linearizzazione attorno ad un punto di
lavoro in modo da impiegare un modello del carico di tipo lineare.
Il più generale modello lineare del carico può venire ricavato
eguagliando la coppia motrice c, fornita dal motore, alla somma di
tre termini:
• un termine cc (coppia di carico), indipendente dalla velocità;
• un termine F ω, proporzionale alla velocità ω di rotazione del
motore secondo un coefficiente di attrito F , pari alla somma
del coefficiente di attrito del motore e di quello del carico,
riportato all’asse del motore;
• un termine J dω
, proporzionale alla derivata della velocità di
dt
rotazione del motore secondo un momento di inerzia J, pari
alla somma del momento di inerzia del motore e di quello del
carico, riportato all’asse del motore.
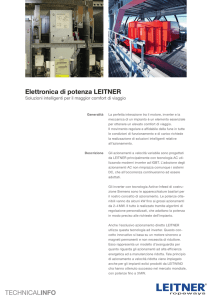
Si ottiene, quindi, la seguente equazione di equilibrio:
c = cc + F ω + J
dω
.
dt
(1.1)
Il comportamento dinamico del carico può, pertanto, venire analizzato impiegando il modello lineare, riportato nello schema a blocchi funzionale di Fig. 1.2, caratterizzato dai seguenti tre parametri:
una coppia di carico cc , un coefficiente di attrito F ed un momento
di inerzia J. I valori di tali parametri risultano più o meno dipendenti dal punto di lavoro; inoltre, a seconda della applicazione, il
10
Capitolo 1. Classificazione degli Azionamenti Elettrici
-
c
+
cc
+
-
1
J
∫
ω
F
Figura 1.2: Modello linearizzato del carico.
parametro più significativo può risultare o il momento d’inerzia o
la coppia di carico o, più raramente, il coefficiente di attrito.
Come per il tipo di azionamento, anche per caratterizzare il tipo di carico si può effettuare una suddivisione in due grandi classi:
carico dissipativo e carico inerziale. Si identificano con la dizione
carico di tipo dissipativo quelle applicazioni nelle quali una parte
preponderante dell’energia fornita dall’attuatore (motore) viene impiegata nella lavorazione oppure dissipata per compensare l’effetto
degli attriti; viceversa si è in presenza di un carico di tipo inerziale quando quasi tutta l’energia fornita dall’attuatore è utilizzata
per accelerare e decelerare il carico. Applicazioni quali la tornitura, la fresatura, la trazione ferroviaria pesante, la ventilazione, la
mescolatura e il sollevamento sono esempi tipici di carico di tipo
dissipativo, mentre sono caratterizzati da un carico di tipo inerziale gli azionamenti per robotica, i meccanismi di posizionamento e
la trazione metropolitana.
Quando il carico è di tipo dissipativo, è, in genere, possibile
trascurare la dipendenza dell’inerzia dal punto di lavoro; la conoscenza di tale dipendenza risulta, invece, essenziale in presenza di
un carico di tipo inerziale.
1.2. Classificazione sulla base del comportamento dinamico
1.2
11
Classificazione sulla base del comportamento dinamico
Una ulteriore caratterizzazione delle varie applicazioni può venire effettuata sulla base del comportamento dinamico richiesto per
l’azionamento e delle conseguenti interazioni tra il comportamento
dell’attuatore e quello del carico. Tale aspetto può venire evidenziato ricorrendo alla seguente suddivisione in quattro classi:
• dinamica molto lenta;
• dinamica lenta;
• dinamica rapida;
• dinamica molto rapida.
Con l’espressione a dinamica molto lenta si intende una applicazione nella quale la dinamica del sistema meccanico sia di gran lunga
più lenta di quella dei circuiti elettromagnetici del motore; in queste
applicazioni, pertanto, l’evoluzione meccanica risulta praticamente indipendente da quella dei circuiti elettromagnetici e può venire
determinata sulla base di una modellizzazione semistazionaria del
motore. Anche nelle applicazioni a dinamica lenta la dinamica dei
circuiti elettromagnetici del motore risulta alquanto più rapida di
quella del sistema meccanico, ma, a differenza del caso precedente, influisce, anche se in maniera non particolarmente rilevante, sul
comportamento complessivo del sistema meccanico. Nelle applicazioni a dinamica rapida la dinamica dei circuiti elettromagnetici
influisce, invece, in maniera determinante sul comportamento del
12
Capitolo 1. Classificazione degli Azionamenti Elettrici
sistema meccanico; in quelle a dinamica molto rapida, infine, le
dinamiche dei due sistemi sono comparabili.
In generale, anche se ciò non è sempre verificato, un azionamento
di velocità è caratterizzato da un carico di tipo dissipativo e da una
dinamica molto lenta o lenta, mentre un azionamento di posizione
è caratterizzato da un carico di tipo inerziale e da una dinamica
rapida o molto rapida. Esistono, comunque diverse eccezioni; basta
pensare che mentre un azionamento per trazione ferroviaria pesante
è caratterizzato da una dinamica molto lenta e da un carico dissipativo, un azionamento per trazione metropolitana, che dal punto
di vista funzionale è anch’esso un azionamento di velocità, presenta
una dinamica rapida ed ha un carico prettamente inerziale.
La classificazione effettuata sulla base del tipo di dinamica prevista per l’azionamento consente di introdurre maggiori o minori
semplificazioni nella modellizzazione del motore, della sua modalità di controllo e del carico. Risulta, infatti, evidente che in un
azionamento a dinamica molto lenta il comportamento del motore
può venire descritto mediante un modello semistazionario (cioè ricavato prendendo in considerazione solo il funzionamento a regime
permanente) e quello del carico può venire ricondotto allo schema riportato nella Fig. 1.2, con parametri (coefficienti di attrito
e inerzia) lentamente variabili. Viceversa, se è prevista una dinamica lenta, occorre introdurre nel modello del motore almeno una
costante di tempo.
L’impiego di un modello del motore caratterizzato da una sola
costante di tempo può risultare accettabile anche in azionamenti
caratterizzati da una dinamica rapida. Per tali azionamenti, però,
affinché questo modello possa fornire risultati attendibili è neces-
1.2. Classificazione sulla base del comportamento dinamico
13
sario impiegare metodologie di controllo del motore alquanto più
complesse di quelle impiegate negli azionamenti a dinamica molto
lenta o lenta.
Infine, negli azionamenti a dinamica molto rapida, gli elevati
valori delle accelerazioni fanno risaltare alcuni fenomeni del comportamento dinamico sia del carico sia della struttura meccanica
di supporto (attrito di primo distacco, attrito secco, presenza di
isteresi e non linearità nella trasmissione del moto dal motore al
carico, scarsa rigidità degli accoppiamenti ecc.); per garantire un
buon comportamento dinamico, è necessario, quindi, considerare
un modello più approfondito del carico ed impiegare modalità di
controllo dell’azionamento più sofisticate, che richiedono la stima
in linea di alcuni parametri meccanici.
Una ulteriore suddivisione può essere, infine, effettuata sulla base del significato fisico attribuibile al segnale fornito dal regolatore
di velocità. Si identifica, infatti, con la dizione Azionamento con
comando in velocità un azionamento in cui la velocità del motore
risulta circa proporzionale al segnale fornito dal regolatore di velocità, mentre si impiega la dizione Azionamento con comando in
coppia quando è la coppia motrice fornita dal motore ad essere circa
proporzionale al segnale di uscita dal regolatore.