Formulario per Fisica con Esercitazioni
(LT Chimica Industriale - Bologna)
7 giugno 2013
1
Errori di misura
Errore sulle misure dirette:
• Errore massimo (il risultato della misura non fluttua): 1 oppure 1/2 divisione della scala.
• Errore
misura fluttua): migliore stima della grandezza: x̄ =
Pn statistico (il risultato della
s
1
√
, dove la deviazione standard stimata s è data da: s =
i=1 xi , con errore: sx̄ =
n
n
q
Pn
2
i=1 (xi −x̄)
n−1
Errore sulle grandezze derivate:
• Errori massimi. Misuro le grandezze indipendenti x1 , x2 , ..., xn , ottenendo x1 = x1,0 ±∆x1 ,
x2 = x2,0 ± ∆x2 , e cosı̀ via, fino a x
n = xn,0 ± ∆xn. Poi calcolo y = f (x1,0 , x2,0 , ..., xn,0 ).
∂f ∂f ∂f L’errore ∆y su y è dato da: ∆y = ∂x
∆x1 + ∂x
∆x2 + ... + ∂x
∆xn
n
1
2
• Errori statistici per variabili non correlate. Misuro le grandezze indipendenti x1 , x2 , ..., xn ,
ottenendo x1 = x1,0 ± σ1 , x2 = x2,0 ± σ2 , e cosı̀ via, fino a xn = xn,0 ± σn . Poi calcolo
y = f (x1,0 , x2,0 , ..., xn,0 ). L’errore σy su y è dato da:
s
2
2
2
∂f
∂f
∂f
2
2
σ1 +
σ2 + ... +
σn2
σy =
∂x1
∂x2
∂xn
2
Cinematica
Definizioni. Sia ~r(t) il vettore posizione di un punto variabile col tempo t. Si definisce la
velocità ~v (t) = d~r/dt e l’accelerazione ~a(t) = d~v /dt = d2~r/dt2 .
Moto rettilineo uniforme. ~a = 0; ~v = ~v0 =costante; ~r(t) = ~r0 + ~v0 t
Moto uniformemente accelerato. ~a =costante; ~v (t) = ~v0 + ~at; ~r(t) = ~r0 + ~v0 t + 21 ~at2 .
Moto circolare uniforme. Velocità angolare: ω = dθ
, costante. Posizione: ~r(t) = r cos(ωt)~i +
dt
r sin(ωt)~j. Velocità: ~v (t) = −rω sin(ωt)~i + rω cos(ωt)~j. Accelerazione: ~a(t) = −rω 2 cos(ωt)~i −
rω 2 sin(ωt)~j. L’accelerazione è centripeta, la componente tangente alla traiettoria è nulla.
2
Modulo della velocità: v = ωr. Modulo dell’accelerazione (centripeta): a = ω 2 r = vr .
1
3
Operazioni con i vettori
Dati due vettori ~a = ax~i + ay~j + az~k e ~b = bx~i + by~j + bz~k, sia θ l’angolo compreso tra i due
vettori. Si ha:
Prodotto scalare. ~a · ~b = ax bx + ay by + az bz = |~a| · ~b · cos θ. Segue che se ~a e ~b non sono nulli
allora ~a · ~b = 0 se e solo se ~a ⊥ ~b.
Prodotto vettoriale. ~a × ~b = (ay bz − az by )~i + (az bx − ax bz )~j + (ax by − ay bx )~k. In alternativa,
~
~
direzione
e verso di ~a × b si trovano con la regola della mano destra e il modulo |~a × b| =
|~a| · ~b · sin θ. Se ~a e ~b non sono nulli allora ~a × ~b = 0 se e solo se ~a||~b.
4
Dinamica del punto materiale
Leggi di Newton. In un sistema inerziale si ha: 1) F~ = 0 → ~v = costante. 2) F~ = m~a. 3)
F~1,2 = −F~2,1 , NB: F~1,2 e F~2,1 non hanno lo stesso punto di applicazione!
Quantità di moto. Si definisce la quantità di moto per una particella di massa m il prodotto
p~ = m~v . Se non ci sono forze esterne (punto isolato) la quantità di moto si conserva durante il
moto.
Teorema dell’impulso. Si definisce impulso J~ della forza F~ nell’intervallo di tempo t2 − t1 al
quantità:
Z
J~ ≡
t2
F~ dt = F~ (t2 − t1 )
(1)
t1
Dove nel secondo passaggio si è applicato il teorema della media ottenendo anche il risultato
collaterale J~ = F~ ∆t. Per il II principio della meccanica si ha il teorema dell’impulso:
Z t2
J~ =
F~ dt = m ~v2 − m ~v1 ≡ ∆P~ .
(2)
t1
RB
~ In generale LAB dipende dal cammino fatto per
Lavoro fatto da una forza. LAB = A F~ · ds.
andare da A a B.
Forze conservative. Una forza F~ è detta conservativa se esiste una funzione U (x, y, z) detta
energia potenziale, tale che F~ = −∇U . Se F~ è conservativa LAB non dipende dal percorso
scelto per andare da A a B; il lavoro in un percorso chiuso è nullo. Alcune forze conservative
importanti sono a) la forza di gravità P~ = m~g , scegliendo un asse y diretto verso l’alto si ha
~ e quindi UF = k(∆l)2 /2.
UP = mgy; b) la forza della molla: F~ = −k ∆l
Energia cinetica e conservazione dell’energia. Si definisce energia cinetica di un punto materiale
di massa m la quantità K = 21 mv 2 . Come conseguenza della seconda legge di Newton si trova
che LAB = KB − KA (teorema dell’energia cinetica o delle forze vive). Se le forze che agiscono
sul punto materiale sono tutte conservative si ha anche che LAB = −(UB − UA ) e quindi:
KA + UA = KB + UB , cioè, nel passare da A a B l’energia meccanica totale K + U si conserva.
Forze non conservative. Le forze di attrito sono tipiche forze non conservative che si oppongono
allo spostamento e quindi sono anti-parallele rispetto a quest’ultimo. Per quanto riguarda il
modulo: nel caso dinamico fa = µk N , dove N è la forza normale applicata dal vincolo al corpo
che si muove e µk è il coefficiente di attrito dinamico. Nel caso statico fa ≤ µs N , dove µs è il
coefficiente di attrito statico. Per una data superficie generalmente si ha µk ≤ µs .
2
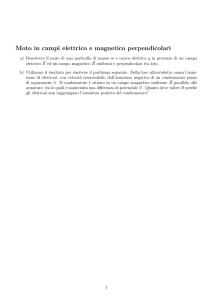
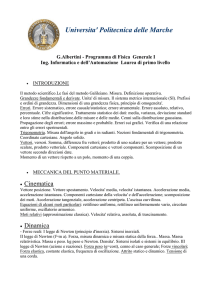
Figura 1: Momenti d’inerzia per alcune figure solide di uso comune.
5
Dinamica dei corpi rigidi
Centro di massa. Per un sistema di punti materiali mi con i = 1, . . . , n è utile definire il Centro
di Massa (CM) come quel punto che ha posizione:
Pn
mi~ri
~rCM = Pi=1
(3)
n
i=1 mi
o, equivalentemente, nel caso di corpi continui, con densità ρ:
R
ρ(~r)~rdV
~rCM = RV
ρ(~r)dV
V
(4)
Si dimostra che ai fini del calcolo della risultante delle forze e dei loro momenti la forza di
gravità può essere pensata come se fosse applicata nel centro di massa.
Quantità di moto. Per un corpo esteso di massa totale M la quantità di moto è data da:
P~ = M ~vCM dove ~vCM è la velocità del centro di massa: ~vCM = d~rCM /dt.
Momento di una forza. Data una forza F~ applicata nel punto P , si definisce il momento ~τ della
forza F~ rispetto al punto O il vettore ~τ = ~r × F~ . Dove ~r è il vettore posizione di P rispetto a
O, cioè ~r = P − O (il vettore che va da O a P ).
Momento d’inerzia. Per un sistema di i = 1, . . . , n punti materiali
di massa mi si definisce
Pn
il momento d’inerzia Is rispetto all’asse s lo scalare: Is = i=1 mi d2i , dove di è la distanza
del punto materiale i−esimo dall’asse s. Nel casoRdi un corpo continuo con densità ρ(~r) la
definizione di Is si trasforma naturalmente in: Is = V ρ(~r) [d(~r)]2 d~r. In figura 1 sono riportati
i momenti d’inerzia per alcune figure solide di uso frequente.
Teorema di Huygens-Steiner (o dell’asse parallelo). Il momento d’inerzia rispetto a un asse s,
parallelo a un altro asse c passante per il centro di massa, si ottiene sommando al momento di
inerzia Icm rispetto a c il prodotto tra la massa M del corpo e la distanza d al quadrato tra gli
assi c ed s: Is = Icm + M d2 .
Momento angolare o momento della quantità di moto. Per un punto materiale P di massa m
~ rispetto al punto O è definito come: L
~ = ~r × m~v , dove ~r
e velocità ~v , il momento angolare L
3
è il vettore posizione di P rispetto a O, cioè ~r = P − O (il vettore che va da O a P ). Per un
corpo rigido che ruota con velocità angolare ω
~ attorno a un asse fisso s si trova che il momento
~ = Is ω
angolare calcolato rispetto a un punto sull’asse s è dato da L
~.
Equazioni cardinali della dinamica. Dato un corpo di massa M a cui siano applicate forze
esterne con risultante F~ext , la sua quantità di moto P~ = M~vcm varia secondo la prima equazione
cardinale della dinamica:
dP~
(5)
F~ext =
dt
se la massa è costante l’equazione (5) diventa F~ext = M~acm .
Detto ~τo il momento risultante delle forze esterne calcolato rispetto a un punto O che sia
~ calcolato rispetto a O varia in accordo
fisso oppure il centro di massa, il momento angolare L
con la seconda equazione cardinale:
~
dL
~τo =
(6)
dt
Se il corpo in questione è rigido e ruota con velocità angolare ω
~ attorno a un asse principale
~ = Io ω
(assumere equivalente ad asse di simmetria) si ha L
~ e quindi l’equazione (6) si trasforma
in:
d~ω
~τo = Io
= Io α
~
(7)
dt
~ ~τo , α
dove α
~ è l’accelerazione angolare. In questo caso L,
~ sono tutti diretti come ω
~.
Energia cinetica di un corpo rigido. Teorema di König per l’energia cinetica di un corpo rigido:
2
+ 12 Icm ω 2 dove: vcm è la velocità del centro di massa, ω è il modulo della velocità
K = 21 M vcm
angolare, Icm è il momento d’inerzia calcolato rispetto a un asse passante per il centro di massa
e parallelo a ω
~.
6
Gravitazione
Forza di attrazione gravitazionale tra due masse M e m poste a distranza r l’una dall’altra. La
forza F~m agente su m, dovuta alla presenza di M è data da:
Mm
F~m = −G 2 · r̂
r
(8)
Dove r̂ è il versore diretto secondo la congiungente le due masse (assunte puntiformi) ed uscente
da M (la forza tra le due masse è attrattiva). G è la costante di gravitazione universale:
G = 6.67 × 10−11 Nm2 /kg2 .
Campo gravitazionale. Si può definire un campo gravitazionale:
~g =
F~m
M
= −G 2 · r̂
m
r
(9)
Il campo di un sistema di masse è la somma vettoriale dei campi delle singole masse. Si dimostra
che ~g è un campo conservativo e che vale il Teorema di Gauss (vedi Eq.(13)) come per il campo
elettrico:
I
~ = −4πGM
Φg ≡
~g · dA
(10)
SC
4
Energia Potenziale. L’energia potenziale gravitazionale tra due masse M ed m si può scrivere
come Ug = −GM m/r dove r è la distanza tra le masse. −Ug è l’energia che deve essere spesa
per portare una delle due masse a distanza infinita dall’altra.
Leggi di Keplero. 1) L’orbita descritta da un pianeta è un’ellisse, di cui il Sole occupa uno dei
due fuochi. 2) Il segmento (raggio vettore) che unisce il centro del Sole con il centro del pianeta
descrive aree uguali in tempi uguali. 3) I quadrati dei periodi di rivoluzione dei pianeti sono
proporzionali ai cubi dei semiassi maggiori delle loro orbite.
7
Elettrostatica
Forza tra due cariche q1 e q2 puntiformi (forza di Coulomb) a distanza r:
1 q1 q 2
· r̂
F~ =
4π0 r2
(11)
1
' 9 × 109 Nm2 /C2 . La forza
con 0 = 8.85 × 10−12 C2 /(Nm2 ). Può far comodo anche K = 4π
0
tra due cariche dello stesso segno è repulsiva.
Campo elettrico in P, generato da una carica puntiforme q posta in O:
~ = 1 q · r̂
E
(12)
4π0 r2
con r vettore posizione da O a P. Il campo di un sistema di cariche è la somma vettoriale dei
campi delle singole cariche.
Teorema di Gauss. Data una superficie chiusa “SC”:
I
~ = Qint
~ · dA
~
(13)
E
Φ(E) =
0
SC
~ = −∇V . Quindi si ha:
Potenziale elettrico. E’ definito come quella funzione V tale che E
Z B
~ = −(V (B) − V (A))
~ · dl
E
(14)
A
Quando non specificato si assume B → ∞ e V (∞) = 0. Il potenziale relativo al campo elettrico
generato da una carica puntiforme q, a distanza r dalla carica pertanto è:
1 q
V (r) =
(15)
4π0 r
Una carica q che si muove da A a B acquista (o perde) un’energia U = q[V (A) − V (B)].
Energia Potenziale. L’energia potenziale elettrostatica tra due cariche q1 e q2 si può scrivere
come Ue = q1 q2 /(4π0 r) dove r è la distanza tra le cariche. −Ue è l’energia che deve essere
spesa per portare una delle due cariche a distanza infinita dall’altra.
Densità di energia. La densità di energia del campo elettrico è uE = 0 E 2 /2.
Dielettrici. Se lo spazio vuoto viene sostituito con un mezzo dielettrico con costante dielettrica
relativa r , le formule viste valgono ancora, purché si sostituisca 0 con = 0 r .
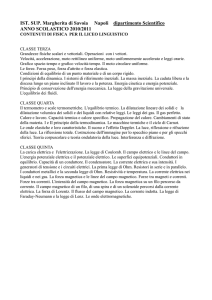
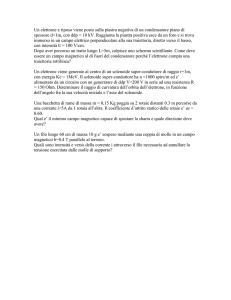
Condensatori. Capacità: C = Q/V dove Q = carica sulle armature e V = ddp tra le armature.
Dati due condensatori C1 e C2 , se sono collegati in serie hanno la stessa carica sulle armature
(Q1 = Q2 ) e la capacità equivalente è Cs = (C1−1 +C2−1 )−1 . Se C1 e C2 sono collegati in parallelo
allora hanno la stessa ddp ai capi (V1 = V2 ) e la capacità equivalente è Cp = C1 + C2 . Posto
= 0 r , vedi Fig. 2 per le formule relative alla capacità dei condensatori di varia geometria.
Nota: la capacità dipende solo dalla geometria dei conduttori (e dei dielettrici) usati. L’energia
immagazzinata nel condensatore è pari a E = CV 2 /2 = QV /2 = Q2 /(2C).
5
Figura 2: Capacità di vari tipi di condensatore.
8
Campo magnetico
Forza di Lorentz. Una particella con carica q che viaggia con velocità ~v in un campo magnetico
~ subisce una forza F~L = q~v × B.
~
B
~ di filo percorso dalla
Campo magnetico generato da una corrente. Un tratto infinitesimo dl
~
corrente i genera nel punto P un campo magnetico infinitesimo dB(P
) dato da:
~ × ~r
µ0 i dl
~
dB(P
)=
·
4π
r3
(16)
~ al punto P in cui viene calcolato dB.
~ La
dove ~r è il vettore posizione che va dall’elemento dl
−7
costante µ0 è detta permeabilità magnetica del vuoto e vale: µ0 = 4π × 10 Tm/A. Questa
relazione è detta IA formula di Laplace o legge di Biot-Savart.
Un filo disposto lungo una curva l nello spazio genera quindi in P un campo magnetico
~ ) = µ0 i
B(P
4π
Z ~
dl × ~r
r3
l
(17)
~ di filo percorso da corrente i e immerso nel
Forza subita da un filo. Un tratto infinitesimo dl
~ subisce una forza data dalla IIA formula di Laplace:
campo magnetico B
~ = i dl
~ ×B
~
dF
(18)
Su un filo disposto lungo una curva l nello spazio agisce quindi una forza magnetica totale
Z
~ ×B
~
~
F = i dl
(19)
l
~
Teorema di Ampère. La circuitazione del campo magnetico
H B è pari a µ0 per la corrente ic
~ = µ0 i c .
~
concatenata con la linea chiusa scelta per la circuitazione: B · dl
Densità di energia. La densità di energia del campo magnetico è uB = B 2 /(2µ0 ).
6
Forza elettromotrice indotta (Legge di Faraday). La forza elettromotrice indotta in un circuito
~ è data da:
immerso in un campo magnetico B
=−
~
dΦS (B)
dt
(20)
~ è il flusso di B
~ attraverso una qualsiasi superficie S che si appoggia al circuito:
dove ΦS (B)
R
~ Il segno “−” nell’equazione (20) indica che la f.e.m. indotta è tale da
~ =
~ · dA.
ΦS (B)
B
S
~ questo risultato è detto Legge di Lenz.
opporsi alla variazione di ΦS (B),
~ attra(Auto)Induttanze. In un circuito di perimetro l il flusso del campo magnetico ΦS (B)
~ = Li La costante di
verso una superfice S di bordo l è proporzionale alla corrente i: ΦS (B)
proporzionalità L si definisce autoinduttanza del circuito quindi la legge di Faraday prende la
forma
di
(21)
= −L
dt
L’autoinduttanza di un solenoide è bene approssimata da
L = µ0 vn2
(22)
dove v è il volume del solenoide e n numero di spire per metro. Le induttanze in serie e in
parallelo si comportano come le resistenze. L’energia immagazzinata in una induttanza è pari
a E = Li2 /2.
9
Circuiti
Leggi di Ohm. Dato un conduttore con resistenza R, percorso da una corrente i e con ddp V
ai capi, si ha: 1) V = iR 2) R = ρ · l/S dove ρ è la resistività del materiale, S la sezione e l la
lunghezza del conduttore. La potenza dissipata (per effetto Joule) è data da P = V i = i2 R =
V 2 /R.
Resistenze in serie e in parallelo. Date due resistenze R1 e R2 , la resistenza equivalente della
serie delle due resistenze è Rs = R1 + R2 . La resistenza equivalente del parallelo è Rp =
(R1−1 + R2−1 )−1 .
Leggi di Kirchhoff. 1) In un nodo la somma delle correnti entranti è uguale alla somma delle
correnti uscenti. 2) In una maglia la somma algebrica delle differenze di potenziale ai capi di
ciascun elemento circuitale deve essere nulla.
Circuito RC (transiente). a) Scarica: Un condensatore con capacità C e ddp ai capi pari a
Vo viene collegato ai capi di una resistenza R al tempo t = 0. La ddp Vc tra le armature del
condensatore varia con la legge: Vc = Vo e−t/(RC) . b) Carica: Un generatore ideale di ddp V0
viene collegato all’istante t = 0 ad una resistenza R in serie con un condensatore C. La ddp Vc
ai capi di C varia con la legge: Vc = V0 (1 − e−t/(RC) ).
Circuito RL (transiente). a) Accensione: un’induttanza L con una resistenza R in serie viene
collegata ai capi di un generatore di tensione V0 al tempo t = 0. La ddp Vc ai capi di R varia
con la legge: Vc = Vo (1 − e−tR/L ). b) Spegnimento: Un’induttanza L percorsa da una corrente
i0 viene magicamente connessa al tempo t = 0 in parallelo ad una resistenza R. Nel circuito
non è presente alcun generatore. La ddp Vc ai capi di R varia con la legge: Vc = Ri0 e−tR/L .
Circuito LC. Un condensatore con capacità C e ddp ai capi pari a Vo viene collegato ai capi
di una induttanza L al tempo t = √
0. La ddp Vc tra le armature del condensatore varia con la
legge: Vc = Vo cos(ωt), con ω = 1/ LC.
7
10
Eq. di Maxwell
Le eq. di Maxwell in forma integrale trascurando le proprietà dielettriche e magnetiche della
materia sono:
I
~ = Qint
~ · dA
E
0
SC
I
~
~ = − dΦS (B)
~ · dl
E
dt
Il
~ =0
~ · dA
B
(23)
(24)
(25)
SC
I
~ = µ0
~ · dl
B
ic + 0
l
~
dΦS (E)
dt
!
(26)
Nella prima e nella terza eq. SC è una superficie chiusa. Nella seconda e nella quarta eq. l
è una linea chiusa e S è una superficie aperta che ha come bordo l.
• La prima eq. è il teor. di Gauss.
• La seconda eq. è la legge di induzione di Faraday. Il segno “−” al secondo membro merita
il nome di legge di Lenz.
• La terza eq. equivale ad affermare che non esistono monopoli magnetici.
• La quarta eq. è il teor. di Ampère, modificata da Maxwell con l’aggiunta della corrente
di spostamento.
8