5
5.1
Casi di studio legati a proprietà termiche
Componenti caratterizzati da bassa sensibilità a distorsioni termiche
Gli strumenti per msiure di precisione, come i micrometri (Fig.5.1), devono essere progettati per
minimizzare l’impatto di eventuali gradienti termici. Difatti, un componente soggetto a variazioni di
temperatura lungo il suo corpo sarà soggetto a variazioni dimensionali, ovvero a distorsioni, che
determinerebbero errori di misura. Immaginando una variazione di temperatura dT lungo un asse, per uno
spostamento dx, avremo una deformazione termica differenziale secondo le equazioni:
𝑙(𝑇) = 𝑙0 ∙ 𝛼 ∙ (𝑇 − 𝑇𝑜 )
𝑙(𝑇 + 𝑑𝑇) = 𝑙0 ∙ 𝛼 ∙ (𝑇 + 𝑑𝑇 − 𝑇𝑜 )
alla posizione x
alla posizione x+dx
Fig.5.1 – Esempio di micrometro per esterni analogico
[http://www.directindustry.it/prod/mitutoyo/product-4906-593852.html]
Con l indichiamo una generica quota geometrica, ad una certa temperatura, rispetto ad una condizione
iniziale (lunghezza l0, temperatura T0). Il parametro è naturalmente il coefficiente di espansione
termica. La variazione infinitesima nella quota geometrica vale:
𝑑𝑙 = 𝑙(𝑇 + 𝑑𝑇) − 𝑙(𝑇) = 𝑙0 ∙ 𝛼 ∙ (𝑇 + 𝑑𝑇 − 𝑇𝑜 ) − 𝑙0 ∙ 𝛼 ∙ (𝑇 − 𝑇𝑜 ) = 𝑙0 ∙ 𝛼 ∙ 𝑑𝑇
Da definizione di deformazione unitaria:
𝑑𝜀 =
𝑑𝑙
=
𝑙0
𝛼 ∙ 𝑑𝑇
Da cui l’espressione del gradiente di deformazione:
𝑑𝜀
𝑑𝑥
=
𝛼 ∙ 𝑑𝑇
𝑑𝑥
[equazione 1]
Stante la differenza di temperatura, tra x e x+dx avremo trasmissione termica regolata dal flusso termico
q (energia passante per unità di tempo e unità di superficie di interfaccia) regolato, in valore assoluto, da:
|𝑞| =
𝜆 ∙ 𝑑𝑇
𝑑𝑥
[equazione 2]
Dove λ è la conducibilità termica.
Combinando le equazioni 1 e 2, otteniamo una nuova espressione del gradiente di deformazione:
|𝑞| 𝜶
𝑑𝜀
𝑑𝑇
= 𝛼∙
=𝛼∙
= ∙ |𝑞|
𝑑𝑥
𝑑𝑥
𝜆 𝝀
Si può affermare che il gradiente di deformazione, ovvero il grado di sensibilità alla distorsione termica, è
ridotto all’aumentare del rapporto:
𝑰=
𝝀
𝜶
Tale ultimo indice, che potemmo definire come indice di resistenza alle distorsioni termiche, basato su
due proprietà termiche, è di fondamentale importanza ingegneristica. Al fine di memorizzarlo al meglio è
utile ricordare che:
Tensioni e quindi deformazioni termiche sono direttamente proporzionali al coefficiente di
espansione termica; minimizzare (ad es. nelle vetroceramiche Zerodur®, con 10-7 K-1, o nei
37
vetri ULE, con 10-10 K-1) è un’indubbia soluzione per minimizzare le distorsioni termiche; la
quantità a denominatore è quindi il parametro “decrescente” (da minimizzare);
Un materiale ad alta conduttività termica può essere soggetto a riscaldamento differenziale;
l’elevata conducibilità, tuttavia, comporta un rapido livellamento della temperatura e quindi delle
possibilità di deformazione; la quantità a numeratore è quindi il parametro “crescente” (da
massimizzare).
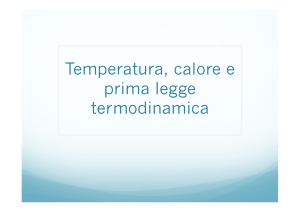
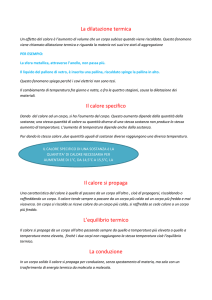
Lo studio delle varie soluzioni viene di solito condotto su diagrammi bi-proprietà con il coefficiente di
espansione termica sull’asse verticale e con la conducibilità termica sull’asse orizzontale (Fig.5.2);
passando ai logaritmi avremo:
𝐿𝑜𝑔𝐼 = 𝐿𝑜𝑔𝜆 − 𝐿𝑜𝑔𝛼
𝐿𝑜𝑔𝛼 = 𝐿𝑜𝑔𝜆 − 𝑳𝒐𝒈𝑰
I materiali meno sensibili alle distorsioni termiche sono collocati su rette di pendenza unitaria, posizionate
in basso a destra del diagramma bi-proprietà; è pertanto consigliabile l’utilizzo dei seguenti materiali:
Silicio (utilizzato ad esempio nei sensori di microscopi a forza atomica, AFM, in Fig.5.3a) e Invar
(lega Fe-Ni ottimizzata per un basso coefficiente di dilatazione termica, effettivamente utilizzata in
meccanismi di orologi, Fig.5.3b): materiali collocati sulla linea per il valore di I più elevato;
Carburo di silicio (SiC) e nitruro di alluminio (AlN): materiali caratterizzati da un coefficiente di
dilatazione medio, ma anche da una conducibilità termica più che discreta (secondo meccanismo
fononico);
Leghe di tungsteno e carburo di tungsteno (WC);
Leghe di rame (l’alto elevato coefficiente di dilatazione è compensato dalla ottima conducibilità
termica);
Leghe di alluminio (meno prestazionali delle leghe di rame, ma con lo stesso principio di
ottimizzazione);
La selezione effettiva non può prescindere dalla considerazione di altri aspetti come il costo, la fragilità
(che limita l’adozione del silicio) e indici di rigidezza flessionale:
I’=E1/2/ρ, per micrometri del tipo rappresentato in Fig.5.1 (è importante garantire la minima
deformabilità meccanica, oltre alla minima deformabilità termica, e al contempo ridurre la massa);
I’=E1/3/ρ, per pannelli del tipo rappresentato in Fig.2.8 (supporti per specchi di grandi dimensioni).
L’ottimizzazione su un insieme di indici, e non ristretta ad un singolo indice, sarà sviluppata specificamente
nel Cap.11.
Fig.5.2 – Selezione di materiali a bassa sensibilità a distorsioni termiche in un grafico di coefficiente di dilatazione
termica contro conducibilità termica [da M.F. Ashby, Materials Selection in Mechanical Design, Elsevier, Oxford
2005]
38
a
b
Fig.5.3 – Esempi di componenti fabbricati con materiali poco sensibili alle distorsioni termiche:
a) sensore in silicio di microscopio a forza atomica AFM
[https://www2.warwick.ac.uk/fac/sci/physics/current/postgraduate/regs/mpags/ex5/techniques/structural/afm/];
b)meccanismi di cronografo manuale in lega Invar o Elinvar (lega Fe-Ni analoga all’Invar, contenente Cr e
caratterizzata da una bassa sensibilità del modulo elastico a variazioni di
temperatura)[http://www.deployant.com/review-leroy-chronometre-a-tourbillon/]
5.2
Controllo del transitorio termico
La conducibilità termica non è l’unica proprietà da considerare nella trasmissione termica, giacché
tale parametro regola più propriamente solo i casi di stato stazionario, ovvero di trasferimento di calore tra
due corpi o due ambienti, mantenuti indefinitamente alle condizioni di temperatura iniziali (corpo caldo
come “sorgente infinita” di calore e corpo freddo come “recettore infinito” di calore). In molti casi reali, si
discute una situazione di transitorio termico, ovvero di stato non stazionario: per effetto del
trasferimento termico, almeno uno dei corpi o degli ambienti è soggetto nel tempo ad una variazione di
temperatura. Ad esempio:
Corpo caldo immerso in ambiente più freddo: man mano che il calore viene trasferito all’esterno,
il corpo caldo diventa via via più freddo, fino all’equilibrio termico con l’ambiente (è il caso di
oggetti dispersi in mare aperto: il mare, immensamente più grande di un qualsiasi oggetto
immerso, non perviene a riscaldamento, mentre l’oggetto via via si raffredda);
Corpo freddo a contatto con un ambiente più caldo: man mano che il calore viene trasferito, il
corpo freddo si scalda, fino all’equilibrio termico (è il caso delle pareti di forni discontinui: una
volta arrivati alla temperatura di lavoro, il trasferimento termico verso le pareti tende a scaldarle
progressivamente);
E’ utile ricordare, a questo punto, le leggi di trasferimento termico, evidenziando analogie e differenze con
le leggi di trasferimento di materia (leggi di diffusione di Fick), nella seguente tabella:
Stato
Trasferimento di materia
Stazionario
Non stazionario
𝐽𝑥 = −𝐷 ∙
𝑑𝐶
𝑑𝑥
𝜕𝐶
𝜕2𝐶
=𝐷∙ 2
𝜕𝑡
𝜕𝑥
Trasmissione termica
𝑞 = −𝜆 ∙
𝑑𝑇
𝑑𝑥
𝜕𝑇
𝜕2𝑇
=𝑎∙ 2
𝜕𝑡
𝜕𝑥
Tab.5.1 – Leggi di diffusione e di trasmissione termica
Il segno negativo nelle due equazioni di stato stazionario ha il compito di ricordare che:
Il flusso di materia (massa passante per una certa superficie di interfaccia, nell’unità di tempo) è
direzionato da una zona dove una certa specie chimica è più abbondante ad una zona dove la
stessa specie chimica è meno abbondante;
Il flusso termico q (energia termica passante per una certa superficie di interfaccia, nell’unità di
tempo) si instaura tra un corpo/ambiente caldo verso un corpo/ambiente più freddo;
Il coefficiente di diffusione D, espresso in m 2/s, regola sia il flusso di materia nel caso di stato stazionario
sia l’equazione differenziale nel caso di stato non stazionario, come dimostrato dalle seguenti equazioni
dimensionali:
39
𝑘𝑔
[𝐽𝑥 ]
𝑑𝐶
𝑚2
2∙𝑠
𝑚
[𝐽𝑥 ] = [𝐷] ∙ [ ] → [𝐷] =
=
=
𝑑𝐶
𝑘𝑔
𝑑𝑥
𝑠
[ ]
𝑑𝑥
𝑚3⁄
𝑚
𝑘𝑔
𝜕𝐶
3⁄
[
]
2
𝑚
𝜕𝐶
𝜕 𝐶
𝑚2
𝜕𝑡
𝑠
=
[ ] = [𝐷] ∙ [ 2 ] → [𝐷] = 2 = 𝑘𝑔
𝜕 𝐶
𝜕𝑡
𝜕𝑥
𝑠
[ 2 ] 𝑚3⁄
𝜕𝑥
𝑚2
Nel caso termico, la situazione è diversa:
𝐽
[𝑞]
𝑑𝑇
𝐽
𝑊
2∙𝑠
𝑚
[𝑞] = [𝜆] ∙ [ ] → [𝜆] =
=
=
=
𝐾
𝑑𝑇
𝑑𝑥
𝑚
∙
𝐾
∙
𝑠
𝑚
∙𝐾
[ ]
𝑚
𝑑𝑥
𝜕𝑇
[ ]
𝐾⁄
𝜕𝑇
𝜕2𝑇
𝑚2
𝜕𝑡
𝑠
[𝑎]
[𝑎]
∙ [ 2] →
= 2 =𝐾
=
[ ]=
𝜕 𝑇
𝜕𝑡
𝜕𝑥
𝑠
⁄𝑚2
[ 2]
𝜕𝑥
Il coefficiente a ha la stessa unità di misura del coefficiente di diffusione D. Non a caso la proprietà a è
denominata “diffusività termica”. La diffusività termica deriva dalla conducibilità termica, “modulata” dalla
capacità termica per unità di volume, ovvero dal prodotto tra calore specifico Cp e densità:
𝑎=
[𝑎] =
[𝜆]
[𝜌] · [𝐶𝑝 ]
𝜆
𝜌 · 𝐶𝑝
=
𝐽
𝑚∙𝐾∙𝑠
𝑘𝑔
𝐽
·
𝑚3 𝑘𝑔 ∙ 𝐾
=
𝑚2
𝑠
Fig.5.4 – Schemi di evoluzione termica (stato non stazionario)
E’ possibile risolvere le equazioni differenziali per lo stato non stazionario solo in presenza di certe
condizioni al contorno; nel caso termico, la Fig.5.4 rappresenta qualitativamente l’evoluzione temporale
dei profili termici al variare del tempo, riguardanti interfacce tra un corpo/ambiente caldo immerso e un
corpo/ambiente freddo molto più grande (recettore termico infinito: a seguito del flusso termico verso di
esso la sua temperatura non cambia, ovvero è termicamente inerte) oppure tra un corpo/ambiente freddo
e un corpo/ambiente caldo molto più grande (sorgente termica infinita: come nell’altro caso, a seguito del
40
flusso termico, in questo caso verso l’esterno, la temperatura non cambia, ovvero vige una condizione di
inerzia termica). Possiamo definire una “distanza di propagazione dell’equilibrio termico” (x), che a
sua volta identifica la posizione, all’interno dell’interfaccia, entro cui vige l’equilibrio termico con il
corpo/ambiente termicamente inerte. Tale distanza vale, in buona approssimazione:
𝑥 ≅ √2𝑎 ∙ 𝑡
Si può affermare, sempre in buona approssimazione, che il corpo/ambiente soggetto a variazioni termiche,
è in equilibrio con il corpo/ambiente termicamente inerte allorché x=w (interfaccia “termicamente
sforata”), dopo un certo tempo limite tlim:
𝑥(𝑡𝑙𝑖𝑚 ) ≅ √2𝑎 ∙ 𝑡𝑙𝑖𝑚 = 𝑤
𝑤2
𝑡𝑙𝑖𝑚 =
2𝑎
5.2.1 Contenitori isotermici
Un contenitore è “isotermico” allorché assicura il mantenimento di certe condizioni termiche, al suo
interno, per un tempo adeguatamente lungo. Gli esempi sono numerosi, ma per brevità ci limiteremo ai
seguenti:
Contenitori per cibi caldi/freddi: può essere interessante mantenere cibi caldi per più tempo
possibile “allo stato di preparazione” (ad es. almeno per il tempo di viaggio da un ristorante per
asporto a casa); per mezzo del contenitore è quindi necessario contrastare la trasmissione termica
dal cibo verso l’ambiente circostante, a temperatura non uniforme ma comunque più bassa rispetto
a quella del cibo; per cibi freddi si configura una situazione simmetrica, ovvero è necessario
contrastare la trasmissione termica dall’ambiente circostante verso il cibo (ad es. per cibi surgelati
si cerca di non pervenire a scongelamento durante il viaggio da un supermercato a casa);
Radiofari (Fig.5.5): ogni membro dell’equipaggio di aerei militari è dotato di un radiofaro (radio
beacon, in inglese); si tratta di un trasmettitore radio omnidirezionale in grado di fornire
continuamente un segnale su una specifica frequenza, ai fini della localizzazione in caso di
emergenza; attraverso il contenitore è necessario assicurare un certo tempo minimo di
funzionamento anche in condizioni estreme, ad es. in caso di immersione in acqua a 4 °C
(temperatura media oceanica); se la temperatura all’interno del contenitore si abbassa al di sotto
di una certa soglia, infatti, il funzionamento del radiofaro risulta compromesso;
Mute subacquee: una muta da sub è in sostanza un contenitore isotermico, atto a mantenere per
più tempo possibile la temperatura del corpo sopra una certa soglia, a fronte dell’immersione in
un ambiente più freddo (e termicamente inerte).
Fig.5.5 – Schema di radiofaro [da M.F.
Ashby, Materials Selection in Mechanical
Design, Elsevier, Oxford 2005] e
collegamento con la situazione di
transitorio termico di Fig.5.4
In tutti i casi è evidente che la situazione ottimale corrisponde a tempi limite quanto più lunghi possibile.
Se non si può operare attraverso la geometria (azione sulla struttura), ovvero aumentando lo spessore
dell’interfaccia w (spessore del contenitore), non resta che agire sul materiale ovvero sulla diffusività
termica a, minimizzandola. La diffusività è un indice della sensibilità ai transitori termici. E’ vero che la
struttura potrebbe essere organizzata in modo da annullare, praticamente, il contributo dei materiali, nel
caso in cui il contenitore sia costituito da due pareti, con frapposto il vuoto (principio del vaso di Dewar);
la soluzione è altamente efficiente (nel vuoto la trasmissione termica avviene solo per irraggiamento), ma
non si presta a tutte le applicazioni (è impensabile adottare la soluzione per i radiofari o per le mute).
41
La Fig.5.6 mostra il diagramma diffusività/conducibilità termica, che consente l’effettiva selezione
di materiali caratterizzati da una bassa sensibilità ai transitori termici. Abbastanza sorprendentemente le
schiume polimeriche, ben note per il largo utilizzo nel campo dell’isolamento termico, non rappresentano
la scelta migliore. Sono infatti caratterizzate dalla minima conducibilità termica, utile per ostacolare il
trasferimento termico in condizioni di stato stazionario, ma non dalla minima diffusività, che compete a
elastomeri, come il neoprene (poli-cloroprene), l’isoprene (poli-isoprene, analogo della gomma naturale)
e la gomma butilica.
Fig.5.6 – Selezione di materiali a bassa sensibilità a transitorio termico in un grafico di coefficiente di conducibilità
termica contro diffusività [da M.F. Ashby, Materials Selection in Mechanical Design, Elsevier, Oxford 2005]
a
b
c
Fig.5.7 – a) Contenitore isotermico per alimenti in neoprene [http://www.chinaseniorsupplier.com/];
b) mute subacquee in neoprene [www.ilovepescasub.com]; c) contenitore isotermico per alimenti in polipropilene
espanso [http://www.polibox.com/en/polibox.html]
La Fig.5.7 mostra, a supporto della selezione, contenitori isotermici per cibi (Fig.5.7a) e mute subacquee
(Fig.5.7b) in neoprene.
Nella realtà la selezione è un po’ più raffinata. La Fig.5.6 corrisponde ad un insieme di soluzioni
limitato (corrispondente al livello 2 del database Cambridge Engineering Selector), caratterizzato da una
non ottimale definizione del sotto-insieme delle schiume polimeriche flessibili (flexible polymer foams).
Dall’osservazione del diagramma, in base alla diffusività termica, tale classe di schiume risulta non
interessante ai fini della resistenza ai transitori termici. In realtà, le schiume rappresentate sono le schiume
elastomeriche altamente flessibili, utilizzate ad esempio nelle imbottiture di poltrone e sedili, a celle aperte.
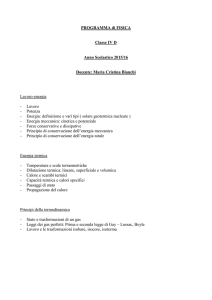
In diagramma in Fig.5.8, ristretto alle schiume (di ogni materiale di base) e agli elastomeri termoplastici o
reticolati (termoindurenti), ma alla massima risoluzione (livello 3 del database Cambridge Engineering
Selector), mostra come talune schiume flessibili (poliuretaniche), ma a celle chiuse, possano offrire una
discreta alternativa agli elastomeri. E’ evidente che l’“architettura” delle schiume (pori aperti o no)
modifica profondamente le applicazioni, a parità di costituenti e di porosità totale; nel caso di celle
chiuse non è trascurabile l’impatto sulle proprietà termiche, del gas contenuto nelle celle stesse (che può
trasmettere calore principalmente per convezione). Riassumendo:
42
I pori diminuiscono la conducibilità termica, rispetto al solido di base, a patto di considerare
correttamente il contributo del gas e dell’architettura (in una schiuma a celle aperte la convezione
è favorita);
I pori abbassano anche la densità, rispetto al solido di base; il calore specifico è nuovamente
condizionato dalla natura plurifasica (solido e gas intrappolato).
L’ottimizzazione della diffusività deriva quindi da un delicato equilibrio, alla base dell’adozione, nelle mute
subacquee, di neoprene a celle chiuse (contenenti azoto) e non di neoprene “monolitico”.
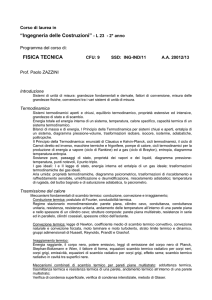
La Fig.5.8 segnala, infine, la buona prestazione in termini di diffusività termica di talune schiume
polimeriche rigide, effettivamente utilizzate, come illustrato dalla Fig.5.7c, per contenitori isotermici per
cibi. Come già visto nel paragrafo 5.1, la selezione effettiva non riguarda una singola funzionalità; la
schiuma polimerica, benché meno prestazionale rispetto alla gomma, in termini di diffusività, presenta un
10
migliore indice
di rigidezza (I=E1/3/ρ), per la costruzione di pannelli.
Alumina foam (99.8%)(1.2)
Styrene butadiene rubber (SBR, 30% carbon black)
Alumina foam (99.8%)(0.8)
Thermal conductivity (W/m.°C)
Polychloroprene (CR, 17-50% carbon black)
Silicone (VMQ, thermally conductive, 40-70% mineral)
Alumina foam (99%)(0.825)
1
Nitrile rubber, hydrogenated (HNBR)
Aluminum
Epichlorohydrin rubber (CO, unreinforced)
Cordierite foam (0.5)
Polychloroprene (CR, unreinforced)
Mullite foam (0.70)
Graphite foam (0.12)
Acrylic rubber (ACM, unreinforced)
Silicone, phenyl-type (PVMQ, heat cured,10-30% fumed silica)
Butyl / halobutyl rubber (IIR, unreinforced)
PE-HD foam (cross linked, closed cell, 0.080)
0,1
PVC-elastomer (Shore A35)
PE foam (cross-linked, closed cell, 0.080)
Carbon foam (retic
ABS foam (structural, 0.85)
PS foam (closed cell, 0.020)
PS foam (structural, 0.8)
Styrene acrylonitrile foam (closed cell, 0.315)
Polyurethane foam (flexible, closed cell, 0.16)
Melamine foam (0.01
PVC cross-linked foam (rigid, closed cell, DH 0.045)
PVC cross-linked foam (rigid, closed cell, KR 0.030)
Styrene acrylonitrile foam (closed cell, 0.148)
Phenolic foam (closed cell, 0.035)
Polyurethane foam (flexible, closed cell, 0.08)
0,01
1e-8
1e-7
1e-6
Thermal conductivity/(Density*Specific heat capacity)
Fig.5.8 – Grafico di coefficiente di conducibilità termica contro diffusività termica, ricavato attraverso CES EduPack
2015 (rappresentazione dei dati ristretta ai sottoinsiemi: i) schiume, in verde; ii) elastomeri reticolati, in celeste;
iii) elastomeri termoplastici, in rosso – in evidenza, in arancione, il neoprene confrontato con alcune schiume
polimeriche a bassa diffusività)
Nota di progettazione – Schiume come materiali compositi: Considerando la conducibilità termica
del solido λ0 e la conducibilità termica totale del gas (conduzione e convezione) λ G, la conducibilità di un
materiale ad alta porosità P (ovvero di un cosiddetto “solido cellulare”), può essere descritta
dall’equazione:
1
1 P 2 (1 P)1.5 0 P G
3
I solidi cellulari per isolamento termico sono tipicamente a celle chiuse. L’equazione
conducibilità/porosità è una delle tipiche “equazioni costitutive” per materiali compositi: una generica
proprietà è definita come funzione della stessa proprietà, valutata per i costituenti (o fasi, in questo caso
un solido e un gas), e delle quantità dei costituenti stessi (P esprime la frazione volumetrica della fase
gassosa). L’espressione funzionale specifica dipende dall’architettura, ovvero dalla distribuzione e dalla
morfologia delle fasi.
5.3
Combinazioni di conducibilità e diffusività termiche
Le due proprietà che regolano il trasferimento termico nei solidi sono importanti anche combinate
tra loro. Il grafico bi-proprietà fornito in Fig.5.6 o in Fig.5.8 è di grande importanza anche in virtù di linee di
selezione oblique, corrispondenti ad uno specifico indice, da massimizzare o minimizzare, discusso nei
seguenti casi di studio.
43
5.3.1 Forni discontinui ad alta efficienza energetica
Si consideri un forno discontinuo per la sinterizzazione di porcellane (pottery kiln) del tipo illustrato
in Fig.5.9. Il trattamento termico comporta il riscaldamento dell’interno del forno ad una temperatura di
lavoro Ti (temperatura interna), mantenuta per un certo tempo t, molto superiore alla temperatura ambiente
T0. Se si intende ottimizzare l’efficienza energetica dell’apparecchiatura, bisogna in primo luogo osservare
che questa non dipende solo dalla conduzione termica attraverso le pareti. E’ vero che per il tempo di
lavoro t possiamo considerare un fenomeno di dispersione di calore per conduzione attraverso le pareti
allo stato stazionario, ma questo rappresenta solo una parte delle forme di dissipazione energetica
operanti. Difatti, una non trascurabile parte dell’energia termica viene dispersa nel riscaldamento
delle pareti, caratterizzate da una certa capacità termica.
Fig.5.9 – Esempio di forno discontinuo
per la cottura di porcellane
(http://www.essexkilns.co.uk/ceramickilns-front-loading)
Quantifichiamo nell’ordine i due fenomeni di dispersione:
Conduzione: il calore disperso per conduzione, espresso per unità di superficie di parete, deriva
dall’integrazione dell’espressione di flusso termico allo stato stazionario per il tempo di lavoro; per
uno spessore di parete w:
𝑞 = −𝜆 ∙
𝑄𝑐𝑜𝑛𝑑 [=
{𝑒𝑛𝑒𝑟𝑔𝑖𝑎}
𝑑𝑇
𝑇𝑖 − 𝑇0
= 𝜆∙
[=
]
{𝑡𝑒𝑚𝑝𝑜}{𝑠𝑢𝑝𝑒𝑟𝑓𝑖𝑐𝑖𝑒}
𝑑𝑥
𝑤
𝑡
𝑡
{𝑒𝑛𝑒𝑟𝑔𝑖𝑎}
𝑇𝑖 − 𝑇0
] = ∫ 𝑞 ∙ 𝑑𝑡 = 𝑞 ∙ ∫ 𝑑𝑡 = 𝜆 ∙
∙𝑡
{𝑠𝑢𝑝𝑒𝑟𝑓𝑖𝑐𝑖𝑒}
𝑤
0
0
Riscaldamento: le pareti hanno, in partenza, una certa energia termica, con ogni elemento posto
a temperatura ambiente; con l’esercizio, la faccia interna delle pareti raggiunge la temperatura di
lavoro, mentre la faccia esterna può essere considerata, per semplicità, ancora alla temperatura
ambiente. Se le pareti fossero passassero integralmente da T 0 a Ti, l’assorbimento di calore per
unità di superficie sarebbe regolato da:
𝑄𝑟𝑖𝑠𝑐 [=
{𝑒𝑛𝑒𝑟𝑔𝑖𝑎}
] = 𝐶𝑝 ∙ 𝜌 ∙ 𝑤 ∙ (𝑇𝑖 − 𝑇0 )
{𝑠𝑢𝑝𝑒𝑟𝑓𝑖𝑐𝑖𝑒}
Assumendo un riscaldamento progressivo da T0 a Ti, lungo lo spessore w, otteniamo invece:
𝑄𝑟𝑖𝑠𝑐 [=
{𝑒𝑛𝑒𝑟𝑔𝑖𝑎}
𝑇𝑖 − 𝑇0
] = 𝐶𝑝 ∙ 𝜌 ∙ 𝑤 ∙
{𝑠𝑢𝑝𝑒𝑟𝑓𝑖𝑐𝑖𝑒}
2
A rigor di logica dovremmo considerare anche le fasi di riscaldamento e di raffreddamento, studiando la
temperatura interna Ti come funzione del tempo Ti(t), ma rimaniamo in condizioni di semplicità (le due
espressioni di dispersione termica non avrebbero variazioni sostanziali). Il calore disperso totale (per unità
di superficie di parete) deriva dalla sovrapposizione degli effetti:
𝑄𝑑𝑖𝑠𝑝 [=
{𝑒𝑛𝑒𝑟𝑔𝑖𝑎}
𝑇𝑖 − 𝑇0
𝑇𝑖 − 𝑇0
] = 𝑄𝑐𝑜𝑛𝑑 + 𝑄𝑟𝑖𝑠𝑐 = 𝜆 ∙
∙ 𝑡 + 𝐶𝑝 ∙ 𝜌 ∙ 𝑤 ∙
{𝑠𝑢𝑝𝑒𝑟𝑓𝑖𝑐𝑖𝑒}
𝑤
2
44
𝑄𝑑𝑖𝑠𝑝 = 𝑄𝑑𝑖𝑠𝑝 (𝑤)
Data la particolare dipendenza funzionale dallo spessore w, possiamo individuare uno spessore ottimale
tale da minimizzare il calore disperso totale; il minimo di una funzione corrisponde all’annullamento della
derivata:
𝑑𝑄𝑑𝑖𝑠𝑝
𝑑𝑤
= −𝜆 ∙
−
𝑇𝑖 −𝑇0
𝑤2
∙ 𝑡 + 𝐶𝑝 ∙ 𝜌 ∙
𝑇𝑖 −𝑇0
2
=0
per w=𝑤
̃
𝜆
𝜌
𝜆
∙ 𝑡 + 𝐶𝑝 ∙ = 0 → 𝑤
̃ = √2
𝑡
𝑤
̃2
2
𝐶𝑝 ∙ 𝜌
Dalla definizione, le proprietà del materiale possono essere riunite nella diffusività termica:
𝑤
̃ = √2𝑎𝑡
Calcolando il calore disperso per tale spessore ottimale, otteniamo ovviamente il minimo valore di calore
disperso:
(𝑄𝑑𝑖𝑠𝑝 )𝑚𝑖𝑛 = 𝑄𝑑𝑖𝑠𝑝 (√2𝑎𝑡) = 𝜆 ∙
𝑇𝑖 − 𝑇0
√2𝑎𝑡
∙ 𝑡 + 𝐶𝑝 ∙ 𝜌 ∙ √2𝑎𝑡 ∙
𝑇𝑖 − 𝑇0
2
𝑡
𝜆
𝑡
𝜆
𝜆
(𝑄𝑑𝑖𝑠𝑝 )𝑚𝑖𝑛 = 𝑄𝑑𝑖𝑠𝑝 (√2𝑎𝑡) = (𝑇𝑖 − 𝑇0 ) ∙ √ ∙ ( + 𝐶𝑝 ∙ 𝜌 ∙ √𝑎) = (𝑇𝑖 − 𝑇0 ) ∙ √ ∙ ( + ∙ √𝑎)
2 √𝑎
2 √𝑎 𝑎
𝑡
𝜆
𝝀
(𝑄𝑑𝑖𝑠𝑝 )𝑚𝑖𝑛 = 𝑄𝑑𝑖𝑠𝑝 (√2𝑎𝑡) = (𝑇𝑖 − 𝑇0 ) ∙ √ ∙ ( + 𝐶𝑝 ∙ 𝜌 ∙ √𝑎) = (𝑇𝑖 − 𝑇0 ) ∙ √2𝑡 ∙ ( )
2 √𝑎
√𝒂
𝝀
(𝑄𝑑𝑖𝑠𝑝 )𝑚𝑖𝑛 = 𝐹𝑆𝑄𝑑𝑖𝑠𝑝 ∙ ( )
√𝒂
𝝀
𝑸𝒅𝒊𝒔𝒑 ≥ 𝑭𝑺𝑸𝒅𝒊𝒔𝒑 ∙ ( )
√𝒂
La dispersione di calore sarà tanto più bassa quanto più alto sarà l’indice:
√𝒂
𝑰=
𝝀
L’espressione è linearizzata ai logaritmi così:
1
𝐿𝑜𝑔𝐼 = 𝐿𝑜𝑔𝑎 − 𝐿𝑜𝑔𝜆
2
1
𝐿𝑜𝑔𝜆 = 2 𝐿𝑜𝑔𝑎 − 𝑳𝒐𝒈𝑰
Fig.5.10 – Selezione di materiali per forni discontinui ad alta efficienza in un grafico di coefficiente di conducibilità
termica contro diffusività [adattato da M.F. Ashby, Materials Selection in Mechanical Design, Elsevier, Oxford 2005]
Il grafico di Fig.5.10 mostra la procedura di selezione grafica. Le schiume e gli elastomeri sono altamente
efficaci, anche secondo il nuovo criterio di selezione, tuttavia va segnalato che la temperatura massima di
45
esercizio, per tali materiali, è di gran lunga più bassa rispetto a quella di forni per ceramici. Trascurando i
materiali con temperatura massima di esercizio sotto i 150 °C, otteniamo come materiali ottimali i comuni
mattoni in laterizio, con I pari a circa 10-3 m2·K/(W·s0.5); dalla diffusività (coordinata orizzontale del
grafico) e dai tempi di esercizio comuni lo spessore ottimale 𝒘
̃ risulta dell’ordine di 90-100 mm, in buon
accordo con la pratica industriale (Fig.5.9). Ovviamente saranno adottati più propriamente mattoni per
forno “tecnici”, ovvero in refrattario; i refrattari migliori (non mostrati nel diagramma, per semplicità) sono
caratterizzati da valori di I pari a circa 3 volte superiore a quello dei laterizi (circa 3 10 -3 m2·K/(W·s0.5)).
a
b
Fig.5.10 – Riscaldamento solare passivo: a) schema costruttivo; b) selezione dei materiali più appropriati per la
parete in un grafico di coefficiente di conducibilità termica contro diffusività [adattato da M.F. Ashby, Materials
Selection in Mechanical Design, Elsevier, Oxford 2005]
5.3.2 Pareti per riscaldamento solare passivo
Riprendiamo il concetto di transitorio termico per una breve discussione in merito a dispositivi
per riscaldamento solare passivo, schematizzati in Fig.5.11a, in abitazioni “eco-sostenibili”. Si tratta di
pareti in cui l’esposizione al sole è mirata ad un significativo riscaldamento, di giorno; di notte, il calore
assorbito viene distribuito agli ambienti interni (ad es. attraverso un sistema di ventole), in sostituzione o
a supporto di altre forme di riscaldamento. La singola parete è, in pratica, un “serbatoio termico” da riempire
nelle ore diurne. Il riempimento ottimale corrisponde al raggiungimento dell’equilibrio termico tra la faccia
esterna (riscaldata rapidamente, in quanto direttamente esposta) e la faccia interna; da quanto discusso
in precedenza, ciò si verifica allorché per il tempo di esposizione si arriva a “sforamento” dell’interfaccia
termica, ovvero il tempo di esposizione tesp uguaglia il tempo limite, a sua volta legato allo spessore:
𝑥(𝑡𝑙𝑖𝑚 ) ≅ √2𝑎 ∙ 𝑡𝑙𝑖𝑚 = 𝑤
𝑤2
𝑡𝑙𝑖𝑚 =
= 𝑡𝑒𝑠𝑝
2𝑎
Il calore assorbito (per unità di superficie), per una differenza di temperatura ΔT (tra esterno, “sorgente
infinita” nelle ore diurne, e l’interno), vale:
𝑄𝑎𝑠𝑠𝑜𝑟𝑏 = 𝐶𝑝 ∙ 𝜌 ∙ 𝑤 ∙ ∆𝑇 = 𝐶𝑝 ∙ 𝜌 ∙ √2𝑎 ∙ 𝑡𝑒𝑠𝑝 ∙ ∆𝑇 = 𝐶𝑝 ∙ 𝜌 ∙ √𝑎 ∙ √2𝑡𝑒𝑠𝑝 ∙ ∆𝑇
𝜆
𝝀
∙ √𝑎 ∙ √2𝑡𝑒𝑠𝑝 ∙ ∆𝑇 =
∙ √2𝑡𝑒𝑠𝑝 ∙ ∆𝑇
𝑎
√𝒂
𝝀
= 𝐹𝑆𝑄𝑎𝑠𝑠𝑜𝑟𝑏 ∙
√𝒂
𝑄𝑎𝑠𝑠𝑜𝑟𝑏 = 𝐶𝑝 ∙ 𝜌 ∙ √𝑎 ∙ √2𝑡𝑒𝑠𝑝 ∙ ∆𝑇 =
𝑄𝑎𝑠𝑠𝑜𝑟𝑏
46
In questo caso l’indice da massimizzare è l’inverso di quello precedente, per cui potremo utilizzare la
stessa linea di selezione, ma con una direzione di selezione opposta; matematicamente:
𝝀
𝑰=
√𝒂
1
1
𝐿𝑜𝑔𝐼 = 𝐿𝑜𝑔𝜆 − 𝐿𝑜𝑔𝑎
𝐿𝑜𝑔𝜆 = 𝐿𝑜𝑔𝑎 + 𝑳𝒐𝒈𝑰
2
2
Imponendo una esposizione solare di 12 ore (tesp=12 h) e uno spessore di parete non superiore a 50 cm,
otteniamo una seconda espressione riguardante la sola diffusività:
𝑤 = √2𝑎 ∙ 𝑡𝑒𝑠𝑝 = √2𝑎 ∙ (12 ℎ) ≤ 50 𝑐𝑚
(50 𝑐𝑚)2
0.25 𝑚2
𝒎𝟐
−𝟔
𝒂≤
=
≅ 𝟑 ∙ 𝟏𝟎
2 ∙ (12 ℎ) 24 ∙ 3600 𝑠
𝒔
Le soluzioni ottimali sono nel riquadro in alto a sinistra di Fig.5.11b. Il calcestruzzo e le pietre naturali
(più costose) rappresentano le soluzioni più praticabili, con indici superiori a 2·103 W·s0.5/(m2·K). Il titanio
e le sue leghe, benché caratterizzati da indici molto elevati (di oltre 4·103 W·s0.5/(m2·K)) sono improponibili
in termini economici.
5.4
Integrazioni
Ottimizzazione dei grafici attraverso CES
L’adozione del software CES comporta una certa libertà nel posizionamento degli assi. Per l’indice di
resistenza alle distorsioni termiche possiamo ritornare alla situazione più comune, con linee di selezione
per i materiali migliori posizionate in alto a sinistra, operando con la conducibilità termica sull’asse
verticale e il coefficiente di espansione termica sull’asse orizzontale (Fig.5.12):
𝐿𝑜𝑔𝐼 = 𝐿𝑜𝑔𝜆 − 𝐿𝑜𝑔𝛼
𝐿𝑜𝑔𝜆 = 𝐿𝑜𝑔𝛼 + 𝑳𝒐𝒈𝑰
Silver
Gold
Copper
Silicon
Aluminum nitride
Cast magnesium alloys
Boron carbide
Thermal conductivity (W/m.°C)
Non age-hardening wrought Al-alloys
Tungsten alloys Brass
100
Silicon nitride
10
Bronze
Silicon carbide
Alumina
Stainless steel
Cast iron, ductile (nodular)
Marble
1
Silica glass
CFRP, epoxy matrix (isotropic)
0,1
1
10
100
Thermal expansion coefficient (µstrain/°C)
Fig.5.12 – Confronto tra diversi materiali in termini di sensibilità alle distorsioni termiche, con scale invertite rispetto
alla Fig.5.2 [grafico elaborato con CES EduPack 2015, livello 2]
Ottimizzazione di componenti ceramici in funzione dello shock termico
Gli stress termici sono definiti per una condizione di differenze di temperatura “statiche” (come nel caso
di una lastra tra due ambienti diversi) o “quasi statiche” (variazione graduale della temperatura). Quando
la variazione di temperatura è quasi istantanea (per esempio trasportando velocemente un materiale da
un ambiente ad una certa temperatura a un altro a temperatura diversa) è più appropriato riferirsi ad una
condizione di shock termico. Il caso più pericoloso, per buona parte dei materiali fragili, è il brusco
raffreddamento: la parte esterna si raffredda più velocemente e tende a contrarsi; dato che la
contrazione è impedita dall’interno ancora caldo, si sviluppano tensioni di trazione che possono portare
alla rottura del componente. Naturalmente, il regime di sforzo dipende dalla “stabilità” del gradiente
47
termico tra interno ed esterno: se la conducibilità termica del materiale è elevata, le differenze di
temperatura sono molto limitate. Per una valutazione comparativa tra materiali diversi, è utile il
parametro di shock termico (thermal shock parameter o TSP).
rott
TSP
E
dove λ è la conducibilità termica e σrott è il carico di rottura a trazione. Quanto più alto è il TSP, tanto più
un materiale è affidabile nel caso di shock termici. E’ evidente, come nel caso dell’indice di resistenza alle
distorsioni termiche, la raccolta di parametri “favorevoli” a numeratore e “sfavorevoli” a denominatore.
Per completezza, lo shock termico può essere valutato anche attraverso altri parametri, quali:
(1 2 ) rott
RST
E
K IC
RH
E
RST rappresenta il salto termico massimo in condizioni di vincolo triassiale: effettivamente l’interno più
caldo fa da vincolo, nell’impedire la contrazione dell’esterno più freddo (in condizioni di shock termico il
materiale quindi si “autovincola”). Il parametro non indica però la “transitorietà” tipica dello shock termico
(il gradiente di temperatura nello shock termico, come già visto, non è mantenuto indefinitamente,
altrimenti si tratta propriamente di stress termici).
La sensibilità allo shock termico di diversi materiali può essere valutata empiricamente effettuando prove
di resistenza meccanica prima e dopo lo shock, anche effettuando cicli di riscaldamento e
raffreddamento multipli. Più sono bassi i valori dei parametri di shock termico, più la resistenza
meccanica degrada ciclo dopo ciclo, per progressiva criccatura del materiale.
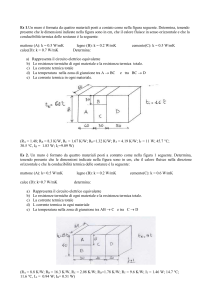
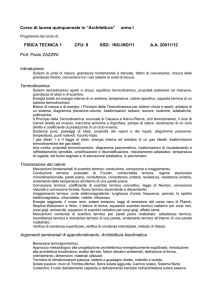
E’ possibile rappresentare il TSP o gli altri parametri come indice di selezione, attraverso CES; con tale
software è infatti possibile rappresentare, sugli assi, non solo proprietà ma anche combinazioni (es.
prodotto λ·σf contro prodotto E·, in Fig.5.13).
1e7
Diamond
Graphite (pyrolytic)(2.06)(parallel to plane)
Silicon carbide (reaction bonded)
1e6
Silicon nitride (hot pressed)(5%MgO)
Thermal conductivity*Yield strength (elastic limit)
Silicon
100000
Germanium
Carbon (recrystallized)(parallel to plane)
Graphite (pyrolytic)(2.19)(parallel to plane)
Graphite (pure)
Beryllia (99)
Tungsten carbide
Boron carbide (HIP)
Graphite (1.82)
10000
Boron nitride (HIP)
Carbon (recrystallized)(perpendicular to plane)
Glass ceramic - 0330
1000
Graphite (premium industrial)(perpendicular to plane)
Silicon nitride (reaction bonded)
Boron nitride (hot pressed) (commercial purity)
Glass ceramic - 9608
Titanium silicate
100
Glass ceramic (ZD)
Ceramici meno sensibili a shock
Silica (quartz fused)
Mullite (Al2O3-SiO2 alloys)
Silica (fused)
10
TSP
Glass ceramic - slipcast
1
0,1
0,01
0,1
1
10
100
1000
Thermal expansion coefficient*Young's modulus
Fig.5.13 – Confronto tra diversi materiali ceramici in termini di TSP
[grafico elaborato con CES EduPack 2015, livello 3]
Riferimenti bibliografici
M.F. Ashby, “Materials Selection in Mechanical Design”, Elsevier, Oxford (UK), 3rd edition, 2005.
CES EduPack 2015 [http://www.grantadesign.com/news/2015/edupack2015.shtml]
Proprietà delle vetroceramiche Zerodur [https://www.pgo-online.com/intl/katalog/zerodur.html]
Proprietà dei vetri ULE [https://www.pgo-online.com/intl/katalog/ule.html]
M. Guglielmi, “Dispense di Scienza e Tecnologia dei Materiali Ceramici (per il Corso di Laurea in
Ingegneria dei Materiali)”, Biblioteca Centrale di Ingegneria, Padova 2002.
M.W. Barsoum, “Fundamentals of Ceramics”, Institute of Physics, London 2003.
48