Azionamenti
Elettrici
Parte 2
Tipologie dei motori
e relativi azionamenti:
Motori asincroni
Motori e Riluttanza Variabile
Prof. Alberto Tonielli
DEIS - Università di Bologna
Tel. 051-6443024
E-mail: [email protected]
Indice generale del corso
■
Parte 1
Introduzione, richiami di Controlli Automatici ed Elettrotecnica
➨ Generazione elettromagnetica di coppia
➨
■
Parte 2
➨
■
Parte 3
➨
■
Tipologie dei motori elettrici e dei relativi azionamenti
● Motori ed azionamenti C.C.
● Motori ed azionamenti Brushless (sincroni a magneti
permanenti)
● Motori ed azionamenti Asincroni ad Induzione
● Motori Passo-passo e coppia
Introduzione al controllo assi
Parte 4
Scelta dell'azionamento
➨ Dimensionamento del motore e dell'amplificatore
➨ Esempi di dimensionamento
➨
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici
3- 2
Indice della Seconda Parte
■
■
Cenni sugli amplificatori di potenza
Motori a collettore (C.C.)
principio di funzionamento
➨ controllo di coppia
➨
■
Motori Brushless a campo trapezoidale
principio di funzionamento
➨ controllo di coppia
➨
■
Motori Brushless a campo sinusoidale
principio di funzionamento
➨ controllo vettoriale di coppia
➨
■
Motori asincroni ad induzione
principio di funzionamento
➨ controllo di velocità in catena aperta e vettoriale di coppia
➨
■
Motori a riluttanza variabile
➨
passo-passo e motori coppia
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici
3- 3
Indice del Modulo
■
■
Introduzione
Modello statico
equivalente trasformatorico
➨ curve caratteristiche
➨
■
Controllo basato sul modello statico
controllo V/F costante
➨ controllo a scorrimento
➨
■
Modello dinamico
equazioni delle correnti e del flusso
➨ equazione della coppia
➨
■
Controllo vettoriale
schemi a blocchi del controllo
➨ stima del flusso
➨
■
Motori a Riluttanza Variabile
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici
3- 4
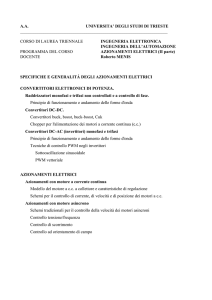
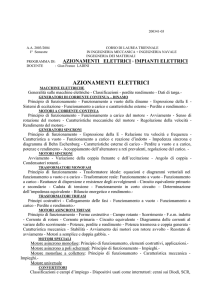
Introduzione
1’
statore analogo a quello del
motore sincrono
2
3
2
1
2’
3
assi magnetici delle tre fasi
3’
1
tipica realizzazione trifase
siccome si associano le
correnti ai flussi,
si assume per le correnti un
vettore rappresentativo
allineato con l’asse magnetico
della relativa fase
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici
3- 5
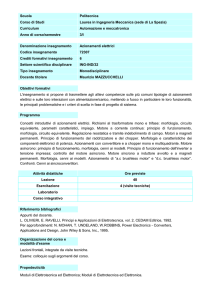
Introduzione
rotore con avvolgimenti
cortocircuitati
1’
3
2
gabbia di scoiattolo
Il flusso sul rotore va
indotto dallo statore
2’
3’
1
Prof. Alberto Tonielli - DEIS Università di Bologna
motore asincrono
sistema non lineare
difficile da controllare
3 circuiti di rotore
3 circuiti di statore
Azionamenti Elettrici
3- 6
Introduzione
Caratteristiche generali
■
Il motore produce coppia solo se la velocità meccanica
(ω r) è diversa da quella del campo rotante (ω s)
➨
■
motore asincrono
Se il rotore taglia le linee di flusso del campo rotante
(ωr≠ωs)
si induce sul rotore una tensione che fa circolare una corrente
sugli avvolgimenti cortocircuitati
➨ sul rotore si genera un flusso rotante alla stessa velocità del
campo (ma con fase variabile) che, interagendo con esso, genera
coppia
➨ il campo rotante genera sia il flusso che la coppia
➨ la velocità nominale del motore è minore di quella di sincronismo
● occorre scorrimento per generare coppia
➨
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici
3- 7
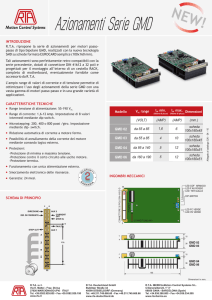
Modello statico
Equivalente trasformatorico
■
Il motore asincrono si comporta come un trasformatore
con accoppiamento tra primario e secondario variabile
con lo scorrimento
ωe −ωm
s=
ωe
Scorrimento
Rs
Xds
Xdrs
Is
Vs
Rrs
Irs
Im
Xm
Vr
1− s
R rs
s
Prof. Alberto Tonielli - DEIS Università di Bologna
Xm più piccola di quella
del trasformatore per la
presenza del traferro.
Im anche 40-50% Inom
nei piccoli motori
Simula come una
dissipazione la potenza
meccanica trasferita
Azionamenti Elettrici
3- 8
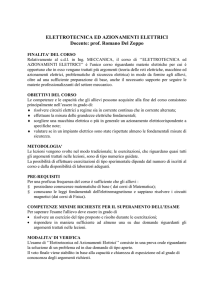
Modello statico
Curve caratteristiche
■
Caratteristica meccanica a tensione e frequenza costanti
Cmax
C
Cavv
Cnom
Rendimento rotorico
ηr = 1-s
Generatore
0
1
Motore
Prof. Alberto Tonielli - DEIS Università di Bologna
s
Coppia a basso s
Cm = k*s
Azionamenti Elettrici
3- 9
Modello statico
Curve caratteristiche
■
Caratteristica meccanica a tensione e frequenza costanti
Cmax
Cavv
C
Cnom
motore standard
per avviamenti a carico
0
1
s
Motore
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 10
Modello statico
Curve caratteristiche
■
Caratteristica meccanica a tensione e frequenza costanti
Cmax
C
Cnom
Cavv
0
1
motore speciale
per funzionamento
a frequenza variablie
s
Motore
servirebbe anche una
struttura magnetica
speciale
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 11
Modello statico
Curve caratteristiche
■
Caratteristica meccanica ideale a tensione e frequenza
variabili (V/f = costante)
V ed f crescono
C
0
Prof. Alberto Tonielli - DEIS Università di Bologna
si sono trascurate
le cadute sulle
resistenze statoriche
ω
Azionamenti Elettrici 3- 12
Modello statico
Curve caratteristiche
■
Caratteristica meccanica reale a tensione e frequenza
variabili (V/f = costante)
C
V ed f crescono
0
Prof. Alberto Tonielli - DEIS Università di Bologna
si sono considerate
le cadute sulle
resistenze statoriche
ω
Azionamenti Elettrici 3- 13
Modello statico
Numero di poli
■
si possono realizzare motori con numero di poli diverso
tipici
● 2, 4, 6 poli
➨ speciali
● 8, 12, 16, 24
➨ per avviamenti con coppie elevate (es. ascensori) doppia polarità
● 2/12, 4/16
➨
■
effetto del numero di poli
➨
a parità di potenza
● al crescere del numero di poli si ha una minore velocità
nominale e, quindi, una maggiore coppia nominale (P=Cω)
● le dimensioni, il peso ed il costo sono funzione della coppia
erogata. Crescono quindi al crescere del numero di poli
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 14
Pregi e difetti
Pro
■
■
■
■
■
■
■
■
Pilotaggio sullo statore
Funzionamento in ambiente ostile
anche con presenza di polveri
ferromagnetiche
Basso costo
Nessun problema alle alte
temperature
Elevata capacita' di sovraccarico
Coppie dinamiche anche 5-6 volte
quella nominale
Prestazioni elevate in esecuzioni
speciali e con azionamenti idonei.
Possibilita' di funzionamento a
velocita' superiori a quella nominale
con coppia ridotta (deflussaggio)
Prof. Alberto Tonielli - DEIS Università di Bologna
Contro
■
■
■
■
calore generato anche
sul rotore (ventilaz.)
la potenza fornita
genera coppia e campo
inerzia relativamente
elevata per la presenza
di ferro sul rotore
controllo difficile
Azionamenti Elettrici 3- 15
Azionamenti per motore asincrono
Controlli basati sulle caratteristiche statiche
Controllo di velocità del tipo V/f = K costante
ωm
f
Kf
se ω in r.p.m.
Kf = p/120
PWM V Inverter
+
Motor
sinus.
V
Kv
Kv = Vmax/fmax
problemi alle basse velocità
per le cadute resistive
numero di poli
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 16
Azionamenti per motore asincrono
Controlli basati sulle caratteristiche statiche
Controllo di velocità del tipo V/f = K costante
V
Vnom
modifiche per
compensare le
cadute resistive
a bassa velocità
off-set
Vo
nonlineare
lineare
fnom
Prof. Alberto Tonielli - DEIS Università di Bologna
f
Azionamenti Elettrici 3- 17
Azionamenti per motore asincrono
Controlli basati sulle caratteristiche statiche
Controllo di velocità del tipo V/f = K costante
compensato
ωm
Kf
f
PWM V Inverter
+
Motor
sinus.
V
Kf = p/120
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 18
Azionamenti per motore asincrono
V
Vnom
se
deflussaggio
Vo
fnom
Rs
Xds
Xdrs
Is
Vs
Rrs
Se f > fnom e Vs = Vsnom
Irs
Im
Xm
f
Vr
1− s
R rs
s
Attenzione alla potenza
Prof. Alberto Tonielli - DEIS Università di Bologna
Im cala
deflussaggio
Azionamenti Elettrici 3- 19
Azionamenti per motore asincrono
Controllo del tipo V/f costante
■
In terminologia tecnica questo tipo di azionamento è
chiamato INVERTER
➨
controllo di velocita' in catena aperta
● velocita' dipendente dal carico
● si può aggiungere un controllo di velocità
● la velocità può essere superiore alla velocità nominale
✙
potenza costante
prestazioni dinamiche modeste
➨ problemi alle basse velocità ed in presenza di coppie di carico
variabili
➨ costo minimo per Kw
➨
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 20
Azionamenti per motore asincrono
Controlli basati sulle caratteristiche statiche
Controllo di velocità a scorrimento
ωsp
PID
∆ω
+
ω
+
f
Kf
ωm
slip control
PWM V Inverter
+
sinus.
Motor
ω
V
schema base V/f
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 21
Azionamenti per motore asincrono
Controllo di scorrimento
■
controllo di velocita' in retroazione
➨
■
■
velocita' non dipendente dal carico
prestazioni dinamiche migliorate ma non eccezionali
piu' costoso per la presenza del sensore
Controllo diretto di coppia
■
controllo senza sensore di velocità (sensorless)
➨
■
■
■
velocità e coppia di carico stimate con modello
prestazioni dinamiche buone
problemi alle bassissime velocità ed in frenata
più costoso per la necessità di un buon processore
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 22
Motore Asincrono ad Induzione - modello dinamico
Schema a blocchi equivalente
vd
+ - +
+
id
1
Req+σ s
iq
+
-
1
Req+σ s
f.e.m.
krτr-1
B
A
B
id
vq -
ω
+
ω0
σ
ϕ
iq
kr
Tm
X
ϕ
kr
ϕ
Lsr
1+τr s
Tr
A
1
J
τr
iq
Lsr
ω
X
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 23
Azionamenti basati sul modello dinamico
Controllo ad Orientamento di Campo
Csp
1
km
ρ
Iqsp PID Vq
COR
ω
V Inverter
+
PWM
Motore
Tinv
ϕsp
PID
FLUX
ϑstim.
stim.
Idsp PID Vd
COR
Id
I
STIMAT.
FLUSSO
Tdir
Iq
ϕ stim
Controllo vettoriale di flusso
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 24
Stima del flusso
■
metodi diretti
sensori di flusso (effetto Hall) nel traferro
● motori speciali
● rumore dovuto agli effetti delle cave statoriche
➨ avvolgimenti nelle cave
● flusso ottenuto per integrazione del segnale
● errori a bassa frequenza dovuti alle derive degli integratori
➨ sono richiesti motori speciali
➨
■
metodi indiretti
➨
eleborazioni sul modello del motore
● osservatori di flusso
✙
●
sistema non lineare a parametri variabili
stimatori di flusso
✙
più semplici
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 25
Motori a Riluttanza Variabile
Motore passo passo
■
■
■
standard
a magneti permanenti
ibrido
Motore coppia a riluttanza variabile
■
■
standard
a magneti permanenti
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 26
Motore passo-passo
Alimentando una fase con una
corrente costante il rotore si
4
2
porta nella posizione per la
c
b
quale il circuito magnetico
a
a’
1’ assume la minima riluttanza e
1
cioè con una coppia di denti (ac’
b’
a’) allineati con la fase
alimentata (1-1’).
4’
2’
La coppia dipende dal quadrato
3’
Motore a 4 fasi
della corrente e dalla posizione.
del tipo 6-8
Motore fortemente nonlineare
⇒ moti incrementali
3
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 27
Motore passo-passo
3
Funzionamento
4
2
c
b
a
1
Motore a 4 fasi
del tipo 6-8
fase 1-1’ alimentata
a’
c’
1’
b’
4’
2’
3’
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 28
Motore passo-passo
3
Funzionamento
4
2
Motore a 4 fasi
del tipo 6-8
c
b
fase 2-2’ alimentata
a’
1
1’
a
b’
c’
4’
2’
3’
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 29
Motore passo-passo
3
Funzionamento
4
2
Motore a 4 fasi
del tipo 6-8
c
b
fase 3-3’ alimentata
a’
1’
1
a
b’
c’
4’
2’
3’
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 30
Motore passo-passo
3
Funzionamento
4
2
c
fase 4-4’ alimentata
a’
b
1
1’
b’
a
Motore a 4 fasi
del tipo 6-8
c’
4’
2’
3’
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 31
Motore coppia
■
statore
1
2
■
3
■
■
Un solo circuito è necessario per
generare coppia
Più fasi sono necessarie per
garantire un movimento continuo
N. denti di rotore = N. poli
molti denti
➨
rotore
■
molta coppia e bassa velocità.
controllo molto complesso
Vista di dettaglio di:
•motore lineare
•motore rotativo
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 32
Motore coppia
Funzionamento
statore
1
2
3
rotore
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 33
Motore coppia
Funzionamento
statore
1
2
3
rotore
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 34
Motore coppia
Funzionamento
statore
1
2
3
rotore
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 35
Motore passo-passo
Pro
■
■
■
■
■
■
■
■
■
Semplicità di controllo
Costo contenuto
Elevato rendimento
Calore sullo statore
Elevate coppie a bassa
velocità
Coppia di mantenimento
Controllo di posizione senza
sensore
Adatto anche per applicazioni
informatiche
grosse potenzialità di sviluppo
per i motori a Riluttanza
Variabile controllati in modo
continuo
Contro
■
■
■
■
Prof. Alberto Tonielli - DEIS Università di Bologna
Caratteristica non lineare
Adatto solo per movimenti
incrementali
Bassa potenza
velocità massima limitata dalla
tensione
Azionamenti Elettrici 3- 36
Motori lineari
■
■
■
La geometria dei circuiti magnetici è tale da generare una
forza anzichè una coppia.
L’allestimento meccanico è realizzato per generare
movimenti lineari (spesso limitati)
Esistono motori lineari
sincroni a magneti permanenti
➨ asincroni ad induzione
➨ a riluttanza variabile
➨
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 3- 37
Azionamenti
Elettrici
Parte 2
Tipologie dei motori
e relativi azionamenti:
Motori asincroni
Motori e Riluttanza Variabile
FINE
Prof. Alberto Tonielli
DEIS - Università di Bologna
Tel. 051-6443024
E-mail: [email protected]