TESINA
DI
MATURITA’
A.S. 2011/2012
Candidato: Depaoli Marco
Progetto: L’ascensore
Classe: 5• el/A
Pagina 1 di 55
PREMESSA
L’ascensore • un impianto a cui • affidato il compito di rendere fruibile alle persone un
edificio, per il trasporto in verticale in condizioni di sicurezza. Per realizzare questo scopo,
esso • formato da un notevole numero di componenti, funzionalmente connessi nel loro
insieme come un unico sistema, di varia natura: meccanica, idraulica ed elettrica.
Chi si occupa di ascensori, perci‚, deve mettere in campo in modo interdisciplinare varie
competenze, rappresentate dalle materie connesse alla natura sopra richiamata, ma non solo.
Infatti, avendo a che fare con la sicurezza, si potrebbe dire immediata, delle persone, risulta
necessario affrontare anche le problematiche connesse alla valutazione del rischio e alla
gestione della manutenzione dei macchinari, per cui gli interessati devono orientare le loro
conoscenze tra numerose disposizioni legislative, norme UNI, norme CEI e regola dell’arte in
generale.
Non a caso, nel nostro Paese e in genere nel mondo gli ascensori sono stati oggetto di severe
norme di legge sin dall’inizio del secolo scorso.
Da queste considerazioni si capisce che la materia in questione • molto vasta ed articolata, per
cui nella presente tesina, vengono esposti soltanto i temi fondamentali dell’argomento
ascensori, secondo un adeguato equilibrio tra parte teorica e parte applicativa o pratica.
Questa tesina ha lo scopo di analizzare il macchinario e l’impianto elettrico degli ascensori, ad
azionamento sia elettrico e sia idraulico, affrontando lo studio degli ascensori in generale,
compreso l’impianto elettrico di alimentazione, per poi passare in particolare ai componenti
del macchinario, con riferimento a quelli principali, del tipo meccanico (argano, funi di
trazione e di sospensione, freno ecc.), idraulico (centralina, pompa, cilindro, pistone,
tubazione ecc.) ed elettrico (quadro di manovra, motore, linee elettriche ecc.).
Pagina 2 di 55
INDICE
Introduzione
4
La storia dell’ascensore
7
L’ascensore e le tipologie d’impianti
13
I componenti dell’ascensore
18
Quadro elettrico e funzionamento ascensore a rel•
33
Le prove di isolamento
34
Sistemi di manovra
35
Messa in servizio
36
Manutenzione
37
Documentazione tecnica
39
Schema funzionale
40
Circuito segnalazione luminose e illuminazione cabina
44
I quadri a microprocessore
45
Il modello di ascensore
47
Pagina 3 di 55
INTRODUCTION
Elevators are vertical transport systems; in current terminology they are frequently referred to
as lifts. The definition of a lift is based on current European legislation: a motorised system
that joins defined levels using a car which moves along rigid guide rails which are inclined to
the horizontal by more than 15ƒ.
Lifts can be used to transport passengers, passengers and goods, or just goods based on its
accessibility, namely the possibility for an individual to enter the lift without difficulty and the
availability of internal controls within reach of the user.
The history of the lift, in the accepted modern meaning of the term, dates back to 1853 when,
during an exhibition held in New York, an industrial engineer stood on a hoist platform and
cut the suspension rope: he wanted to demonstrate the efficiency of the device that he had just
patented, “the safety gear device”. This was basically a ratchet mechanism that could block
the lift on the guide rails even if a cable just became slack. This invention opened the way to
the development of the modern lift.
The first mechanical passenger lift was designed in 1857 and installed in a five-storey
shopping mall in the same city, with an estimated speed of four storeys per minute. Since then
the vertical transport sector has undergone constant transformations and improvements, both
Pagina 4 di 55
technical and technological.
Lifts have been installed in buildings to meet the vertical transport needs of their tenants
and visitors, based on personal convenience and comfort. The lift has evolved from being
initially a luxury piece of equipment to a functional one, with a range of applications that at
times makes it indispensable; it is a necessary addition to overcome architectural barriers.
In accordance with ISO 4190-1, lifts can be divided into five classes, which do not
coincide with the classification laid down by safety regulations in some countries:
I.
passenger transport;
II.
mixed transport of passengers and goods;
III.
hospital lifts;
IV.
transport of objects accompanied by persons;
V.
transport of goods alone.
The modern interpretation of the European directives does not distinguish between these
different types of lift, which is now regarded as rather dated. However, it is possible that a lift
used solely to transport objects – like a car-lift or goods lift – is not subject to the Lifts
Directive but rather to the Machine Directive 98/37/CE.
This report focuses more on the first class of lifts, in particular on the use of lifts operated
by cable traction.
Strictly speaking, all lifts comprise the following basic components:
the ropes (or chains, which can be and are also used for suspension);
the car;
the sling, which connects the car to the suspension cables;
the counterweight, if present;
the guide rails for the car and, if required, those for the counterweight;
the machinery (kinematic chain);
the landing doors;
the driving system;
the pushbutton panels;
the electric cables and electric system.
The most common systems, also known as traction drive systems, operate by direct traction as
follows: a gear is installed in a machine room located – in the basic solution – at the top of the
lift well; a pulley, connected to the low speed shaft of the gear, uses a system of friction to
operate a system of ropes fixed, at one end, to the car, and at the other, to the counterweight;
the car and counterweight usually run inside a built well, limited to a vertical (or,
occasionally, almost vertical) movement by two pairs of metal guide rails; the load-bearing
slab of the machine room allows the ropes to run through specially created holes.
Pagina 5 di 55
The mechanical speed reducer used by the lift machine is usually a worm gear and helical ring
gear.
Lifts with indirect traction are mainly used for particularly heavy loads and the ropes start
from a socket set into the slab, pass through one or more pulleys forming part of the car sling,
rise up by winding around the traction pulley, pass under one or more pulleys forming part of
the counterweight sling, and, lastly, are fixed to another socket in the slab. Using this method,
with the same power, the car moves at half the speed but double the load can be lifted.
Pagina 6 di 55
LA STORIA DELL’ASCENSORE
I sistemi per il trasporto verticale e orizzontale delle persone sono una fondamentale conquista
dell'uomo che ha permesso di garantire quella mobilit‡ piˆ locale che si assomma agli altri mezzi di
trasporto di massa che hanno abbattuto le distanze tra i continenti del nostro pianeta.
Senza tali sistemi, infatti, non avrebbero avuto possibilit‡ di esistere sia le costruzioni sviluppate in
altezza che quelle estese su grandi superfici come gli aeroporti, i centri commerciali, le stazioni
ferroviarie e le stazioni delle metropolitane.
Il primo sviluppo fondamentale che si ebbe in direzione dell'ascensore come oggi • conosciuto
venne dato da un inventore americano, Otis Elisha Graves che invent‚ l’ascensore alimentato a
vapore. Otis nel 1852, supervisionando la costruzione di una fabbrica, disegn‚ e costru‰ un nuovo
tipo di montacarichi dotato di pulsanti di manovra. L’anno successivo apr‰ un piccolo negozio di
ascensori e vendette la sua prima macchina per ascensore il 20 settembre 1853.
Nel 1853 deposit‚ il brevetto di un sistema di sicurezza, il paracadute, la cui dimostrazione avvenne
nel 1854 quando tranci‚ le funi di sospensione con un’accetta, la piattaforma non precipit‚ ma si
arrest‚ dopo un breve spazio proprio grazie al dispositivo paracadute, salvaguardando cos‰
l’incolumit‡ delle persone trasportate.
Il 23 marzo 1857 install‚ in un grande magazzino di New York il primo ascensore per il trasporto di
passeggeri, che trov‚ largo impiego con l’avvento dell’epoca dei grattacieli e, negli anni successivi,
altri famosi ingegneri lo perfezionarono con l'adozione di circuiti idraulici e con l'invenzione
dell'ascensore elettrico, fatta risalire al 1880 in Germania da parte di Werner von Siemens.
Da allora in poi, l’applicazione di ogni nuova tecnologia e tecnica di azionamento e movimento
disponibili fece s‰ che gli ascensori potessero avere corse sempre maggiori e velocit‡ e capacit‡ di
trasporto sempre piˆ elevate, consentendo quindi la costruzione di grattacieli sempre piˆ protesi
verso il cielo.
La corsa verso il cielo continua ancora ed • singolare notare come ad ogni annuncio di velocit‡
maggiori raggiungibili con cabine di ascensori corrispondano progetti per edificare grattacieli
sempre piˆ alti, al limite della sfida ai limiti della natura.
Si sta gi‡ parlando di altezze di 800 metri e i progetti non sono delle chimere.
Ormai parliamo di velocit‡ delle cabine che sono attorno ai 70 km orari e ci‚ ha obbligato i
costruttori di ascensori a risolvere problemi inaspettati quali l’eliminazione del disagio dovuto alla
brusca variazione di pressione subita dal passeggero che in trenta secondi pu‚ essere sottoposto a
variazioni di quota superiori a mezzo chilometro.
Ci‚ • stato risolto mediante dispositivi che pressurizzano gradualmente la cabina quando scende e la
depressurizzano in occasione della salita, in modo da ridurre il disagio dei passeggeri.
Non • una novit‡ tecnica assoluta perchŠ si tratta di una realizzazione normale per gli aerei
passeggeri in concomitanza con le fasi di decollo e di atterraggio.
Anche per gli ascensori sono stati recentemente applicati i sistemi di controllo tipici degli aerei con
l’adozione di dispositivi di sicurezza realizzati mediante software (si tratta del “fly by wire” ormai
comune nella tecnologia aeronautica e va sotto l’acronimo di PESSRAL).
E’ quindi di assoluta evidenza come i sistemi di trasporto verticale abbiano subito nei decenni
recenti, cos‰ come tutte le altre macchine realizzate dall'uomo, mutamenti, potenziamenti e
miglioramenti legati allo sviluppo e al progresso tecnologico.
Ci‚ non significa che dispositivi per il trasporto verticale non esistessero in precedenza, sebbene
quasi sempre fossero azionati dall’energia umana o da quella animale (a volte dall’energia
idraulica).
Infatti esistono indicazioni certe relative all’installazione di ascensori nell’Anfiteatro Flavio di
Roma (il Colosseo) che erano adibiti al trasporto dei gladiatori o degli animali feroci, prima e dopo i
combattimenti.
Vi sono quadri che raffigurano strani ascensori (essenzialmente delle gabbie) che trasportavano i
visitatori e i monaci verso il Monte Athos, partendo dal mare.
Pagina 7 di 55
Una delle prime spettacolari applicazioni della nuova invenzione • quella vista nel 1889 in Francia
in occasione della presentazione della Tour Eiffel a Parigi.
Questo schema illustra i principi di funzionamento dell’ascensore idraulico, come illustrato nella
successiva didascalia. Oggi, due degli ascensori sono ancora idraulici, ma due sono elettrici e sono
stati installati da Gustave Eiffel per l'Esposizione Mondiale del 1900. Ma gli ascensori elettrici si
sono rivelati piˆ fragili e richiedono maggiore manutenzione. I due ascensori idraulici rimangono
tutt’oggi un richiamo culturale delle origini della torre.
Qualcuno potrebbe giustamente considerare il sistema dell’ascensore idraulico che Gustave Eiffel
ha progettato nel 1889 ben in anticipo sui tempi. Ecco come funziona, secondo i dati forniti
dall'organizzazione che gestisce la Torre Eiffel:
Le cabine dell’ascensore che trasportano i passeggeri (che servono contemporaneamente due piani
sovrapposti), montate su un carrello e mantenute orizzontali da un sistema di livellamento, sono
trainate verso l'alto da funi che si muovono in linea con due pistoni paralleli situati sotterranea,
tramite un sistema di pulegge in taglia; le funi stesse, le cui estremit‡ sono fissate al carrello
dell’abitacolo, attraverso due serie di pulegge, una delle quali • fissa e l'altra collegata ai pistoni
mobili, permettono alle cabine passeggeri di percorrere quasi 128, vale a dire otto volte la corsa del
pistone, che • poco meno di 16 metri.
I pistoni sono azionati da un circuito idrico con una pressione di 40 a 60 bar, che fino al 1986
generava il movimento grazie a tre grandi accumulatori di circa 200 tonnellate ciascuna, i quali
fornivano sia la riserva di acqua pressurizzata, l'energia per azionare il movimento e la funzione di
contrappeso.
Dopo la modernizzazione del 1986, motori idraulici azionati da olio idraulico ad alta pressione
guidano il pistone del carrello vettore, mentre due dei tre accumulatori servono come contrappesi.
Pagina 8 di 55
Qui vediamo due degli ascensori idraulici e uno degli accumulatori.
Queste grandi ruote rosse sono uno dei gruppi di pulegge indicate nella precedente didascalia.
Queste sono le pulegge collegate ai pistoni mobili.
Pagina 9 di 55
Qui vediamo uno degli ascensori idraulici della torre, proprio adiacente ad uno dei famosi
accumulatori gialli che aiutano gli ascensori e li riporta in discesa.
Questo è uno degli ascensori elettrici, visibile all'interno di uno dei pilastri della Torre Eiffel.
Pagina 10 di 55
Le tappe piˆ importanti nell'evoluzione dell'ascensore possono essere considerate quelle
dell'abolizione del manovratore, datata 1924, e successivamente l'introduzione delle porte ad
apertura automatica al posto di quelle manuali.
Notevoli progressi si sono registrati anche nel campo dei "quadri di manovra", deputati al controllo
e alla gestione dell'impianto. I moderni sistemi elettronici con microprocessori consentono un
esercizio adattabile ad ogni genere di edificio ed utilizzo (prenotazioni di chiamata, corse con arresti
intermedi per "raccogliere" e "riempire" la cabina fino al raggiungimento del massimo carico, ecc.).
Gli ultimi dieci anni hanno visto ancora grandi modifiche negli ascensori e ci‚ • stato provocato
dalla legislazione europea del cosiddetto “Nuovo Approccio” che ha visto la luce circa 27 anni fa,
nel 1985.
E’ scomparso un elemento dell’ascensore che era considerato inamovibile, almeno secondo la
concezione con la quale impianto era sempre stato progettato e costruito.
E’ scomparso infatti il locale del macchinario, cio• quel locale nel quale erano, e in certi casi sono
ancora, posizionati i macchinari dell’ascensore.
Il macchinario in realt‡ non • scomparso ma • stato sottoposto a una migrazione coatta e
posizionato in parte all’interno del vano di corsa della cabina e in parte all’esterno del medesimo.
Senza indicare gli altri vantaggi di tale soluzione, ormai universalmente applicabile, • facile da
comprendere come l’assenza del locale del macchinario rappresenti per il costruttore una occasione
per disporre di maggior cubatura vendibile, non piˆ obbligatoriamente occupata dai macchinari
dell’ascensore.
Ma non basta perchŠ altre soluzioni sono gi‡ state immaginate e saranno presto realizzate per
diminuire ancora di piˆ l’incidenza dello spazio necessario per l’installazione dei un ascensore.
Applicazioni future potranno essere quelle legate all’utilizzo di motori lineari cos‰ da raggiungere
l’obiettivo di richiedere per un ascensore solo lo spazio necessario per installare una cabina da
impiegare per il trasporto delle persone.
In questa direzione vanno alcune soluzioni gi‡ realizzate che prevedono la possibilit‡ di avere piˆ
cabine in uno stesso vano di corsa, oppure di potere trasferire una cabina da un vano di corsa in uno
adiacente.
Si tratta di soluzioni che perseguono sempre l’obiettivo di ottimizzare l’utilizzo degli spazi, sempre
al fine di aumentare le superfici di un edificio che possono essere messe in vendita.
La storia dell’ascensore • una storia breve che copre tre secoli (19ƒ, 20ƒ e 21ƒ) ma in realt‡ si tratta
solo di 150 anni. Forse le sorprese vere devono ancora venire.
Pagina 11 di 55
Breve Cronologia
1829
1835
1845
1845-1850
1852
1853
1854
1857
1861
1880
1883
1885
1889
1900
1900-1911
Anni '20
1928
Anni '40
1993
Sperimentato il cavo di ferro in montacarichi da miniera
(sarà in uso dal 1840)
Viene installato in una fabbrica inglese il Teagle, primo
montacarichi a vapore
L'inglese Thompson mette a punto il primo montacarichi
idraulico
A Boston e New York sono installati montacarichi idraulici
a cilindro e stantuffo
E. G. Otis costruisce un montacarichi con pulsanti di
manovra e sistemi di sicurezza
E. G. Otis brevetta il dispositivo di sicurezza ascensori a
"paracadute"
E. G. Otis presenta il suo meccanismo di sicurezza
all'esposizione di N. York
P. Gaynor costruisce a N. York il primo edificio con
ascensore per persone
E. G. Otis realizza e ottiene il brevetto per un ascensore a
vapore
All'esposizione di Mannheim, W. Von Siemens mostra
l'ascensore a motore elettrico
Commissionata a W. Le Baron Jenney la costruzione del
primo grattacielo di Chicago
Le Baron Jenney realizza il primo grattacielo in struttura
d'acciaio
Installati a N. York i primi ascensori elettrici
Inaugurata la Tour Eiffel in cui fu montato un ascensore
Otis
Si diffonde l'uso dell'ascensore elettrico con comando a
pulsante
Introduzione del sistema di trazione continua senza
ingranaggi
Si diffondono sistemi di controllo automatico (porte e
comandi dati dall'utente) Gli ascensori raggiungono la
velocità di 1,20 m/s
La Westinghouse sfida la Otis rilevando tutte le più
importanti aziende del settore
Inizia lo sviluppo di sistemi elettronici per il
funzionamento degli ascensori
Gli ascensori più veloci al mondo vengono installati in
Giappone
Pagina 12 di 55
L’ASCENSORE E LE TIPOLOGIE D’IMPIANTI
In generale in un impianto costituente un ascensore elettrico (o idraulico), come si vede
schematicamente dall’esempio di figura, le parti principali si possono ricondurre essenzialmente
alle seguenti:
- locale del macchinario;
- vano di corsa;
- porte di piano;
- cabina;
- apparecchiature e componenti
Pagina 13 di 55
GLI IMPIANTI A FUNE
Per ascensori elettrici si intendono quelli che sono installati permanentemente negli edifici e nelle
costruzioni per servire livelli definiti mediante una cabina (destinata al trasporto di persone o di
persone e di cose). La cabina • sospesa mediante funi oppure a mezzo di catene e il sistema di
trazione pu‚ essere con puleggia di frizione (ascensori a frizione) oppure mediante argano
impegnato (ascensori a tamburo). L'inclinazione delle guide entro le quali si muove la cabina
dell'ascensore, non pu‚ essere superiore a 15ƒ rispetto all'asse verticale.
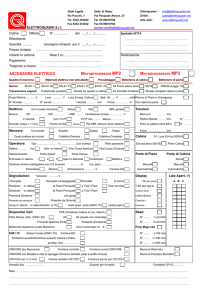
Gli impianti a trazione a fune, considerati “tradizionali”, sono composti da una cabina e da
un contrappeso il cui azionamento avviene
mediante un motoriduttore costituito da un
motore
asincrono
trifase
alimentato
generalmente con una tensione di 400 V ed un
gruppo di riduzione del tipo corona dentata e
vite senza fine; un freno elettromagnetico
aziona la sua forza frenante mediante ganasce
che agiscono su un tamburo posto sull’albero
veloce posizionato tra il motore e il gruppo
riduttore. La trazione viene eseguita mediante
una puleggia di opportuno diametro
denominata “puleggia di frizione” sulla quale le
funi di sospensione appoggiano nelle cave di
forma conica con facce inclinate di 32 ƒ
permettendo un’adeguata tenuta contro lo
scorrimento delle funi.
La velocit‡ dell’impianto • data esclusivamente
dal rapporto di riduzione dell’argano e dal
diametro della puleggia di frizione in quanto si
utilizzano , di norma, motori asincroni trifase
con velocit‡ fissa a 1500 giri/min. ed una
potenza a partire dai 3,5kW a seconda della
portata dell’impianto.
Alcuni argani di riduzione vengono
equipaggiati con motori a due velocit‡ che
garantiscono un avvio e una decelerazione
graduale.
Dal punto di vista delle prestazioni offerte, l'ascensore ad azionamento elettrico • piˆ adatto per
le alte velocit‡ di salita e discesa e le elevate corse raggiungibili. Infatti solo con tale tipo di
azionamento • possibile raggiungere le centinaia di metri richiesti dalle altezze dei moderni
grattacieli e le svariate decine di fermate che devono essere servite con velocit‡ ormai superiori
anche a 15 metri/secondo.
Pagina 14 di 55
L’ ascensore elettrico a funi rappresenta sicuramente la soluzione piˆ diffusa in Italia.
Le sue caratteristiche principali sono:
- locale del macchinario posizionato in alto o in basso rispetto al vano di corsa;
- presenza del contrappeso;
- trazione diretta usata normalmente per ascensori di piccola e media portata con la cabina che
viene collegata direttamente alle funi di trazione;
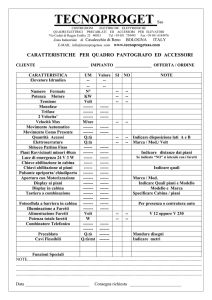
IMPIANTI A FUNE MRL (machine roomless)
Lo sviluppo degli impianti a fune MRL • dovuto a una
serie di innovazioni tecnologiche che hanno condotto alla
notevole riduzione delle dimensioni dei motori elettrici
utilizzati nei sistemi di trazione. A met‡ degli anni 90 nel
campo degli ascensori, vengono introdotti dei piccoli
motori sincroni a magneti permanenti (PMSM) insieme ai
sistemi di:
controllo a tensione e frequenza variabile (VVVF).Il
cambiamento comporta la riduzione delle dimensioni, del
peso, dell’emissione di calore e del consumo di energia
fino a met‡ rispetto agli impianti tradizionali. Il risparmio
energetico rispetto agli impianti idraulici e ancora piˆ
sostanziale. Le dimensioni ridotte del motore hanno come
conseguenza la possibilit‡ di rinunciare al locale macchine
e installare l’intero macchinario all’interno del vano
ascensore.
Questa nuova tecnologia ha creato una serie di vantaggi
ambientali in cascata. Non solo il nuovo design ha portato
ad un uso ridotto di olio e di energia — oltre ad evitare la
potenziale contaminazione del suolo — ha portato anche a
piˆ efficienti e sicure tecniche di installazione, e di
utilizzo del prezioso spazio degli interni.
I vantaggi dell’ ascensore MRL si possono assumere in:
• L’ utilizzo di un ascensore MRL far‡ risparmiare una
notevole quantit‡ di energia (stimata al 70-80%)
rispetto agli ascensori idraulici.
• L’ascenso re MRL elimina i costi e le preoccupazioni
ambientali associati ad un cilindro idraulico sepolto
riempito con olio idraulico. Nel corso degli anni ascensori
idraulici hanno subito un maggior controllo rispetto ai
problemi ambientali a causa del cilindro idraulico sepolto.
PerchŠ l’ascenso re LMR • un ascensore di trazione, con
tutti i suoi componenti di sopra del suolo, questa non • una
preoccupazione per queste apparecchiature.
• L’ascenso re MRL utilizza una macchina gearless, tipo di
trazione, che si traduce in prestazioni e qualit‡ di marcia
superiori rispetto agli ascensori idraulici.
MRL pu‚ operare anche a velocit‡ piˆ elevate, aumentando
cos‰ la percezione di qualit‡ rispetto a un acensore idraulico
convenzionale.
Pagina 15 di 55
GLI IMPIANTI OLEODINAMICI
Per ascensori idraulici (detti anche ascensori oleodinamici) si intendono quelli che sono installati
permanentemente negli edifici e nelle costruzioni per servire livelli definiti mediante una cabina
(destinata al trasporto di persone o di persone e di cose). Tale cabina • sospesa mediante gruppi
cilindro - pistone, funi oppure catene. L'inclinazione delle guide entro le quali si muove la cabina
dell'ascensore, non pu‚ essere superiore a 15ƒ rispetto all'asse verticale.
Il funzionamento di un impianto oleodinamico • basato sulla legge di Pascal di incomprimibilit‡ dei
fluidi. Un pistone, che pu‚ essere interrato o esterno, viene messo in pressione per far salire la
cabina, oppure svuotato per far scendere la cabina.
La velocit‡ raramente supera 0,7 m/sec.
Originariamente il fluido utilizzato era l’acqua, da qui anche la denominazione “idraulico” che a
volte viene usata; oggi • stata sostituita dall’ olio idraulico.
Gli impianti oleodinamici sono costituiti da una centralina oleodinamica composta da un motore
asincrono trifase, una pompa ad ingranaggi ad alta portata di fluido, da un gruppo di valvole
idrauliche comandate da elettromagneti; tale centralina trasmette il moto alla cabina tramite un
pistone ad olio. La spinta pu‚ essere diretta nel caso di grosse portate e corse brevi (ad esempio
come avviene per i montacarichi), oppure indiretta in taglia con fune.
Nel secondo caso, il pistone sulla cui cima • installata una puleggia spinge direttamente le funi le
quali da un capo sono fissate alla cabina mobile e dall’altro capo sono fissate alla base del pistone.
In questo modo la corsa del pistone comporta uno spostamento della cabina del doppio della stessa.
Gli impianti oleodinamici differiscono da quelli a fune per assenza del contrappeso, per diversit‡ di
alcuni comandi elettrici quali i limitatori di velocit‡, l’azionamento e la frenatura.
Pagina 16 di 55
Se ci si riferisce alle applicazioni che rientrano nella norma italiana, per corse non superiori ai
20/25 metri e per velocit‡ non maggiori di 1,0 metri/secondo l'ascensore idraulico fornisce
prestazioni assolutamente comparabili con quelle dell'ascensore elettrico.
Tale tipo di ascensore offre nel contempo una flessibilit‡ di installazione notevolmente
maggiore grazie all'assenza di ogni vincolo relativo al posizionamento del locale del
macchinario che non deve necessariamente garantire una qualunque contiguit‡ al vano di
corsa della cabina eliminando di conseguenza il tradizionale locale del macchinario in alto.
I vantaggi dell’ascensore oleodinamico includono:
-
Il locale macchine non deve essere posizionato sopra il vano di corsa;
Le dimensioni del vano sono ridotte (grazie all’ assenza del contrappeso);
I carichi sono distribuiti sulle pareti laterali;
Il locale macchine pu‚ essere posizionato lontano dal vano di corsa;
Possibilit‡ di realizzare impianti di qualsiasi portata;
I costi di installazione sono ridotti rispetto agli impianti a fune.
Gli svantaggi che comportano gli impianti oleodinamici includono:
-
Maggior consumo energetico;
Limitazione riguardante le prestazioni, tra cui la velocit‡ e la perfezione della fermata
al piano;
Livello di rumore piˆ alto;
Odore proveniente dal surriscaldamento dell’olio;
Problemi dovuti all’impianto ambientale derivato dall’uso di quantit‡ significative
d’olio;
Confort di marcia ridotto.
Pagina 17 di 55
I COMPONENTI DELL’ASCENSORE
Vano ascensore: Si definisce vano di corsa "il volume entro il quale si spostano la cabina e
il contrappeso, se esiste". Si pu‚ notare, quindi, che un ascensore pu‚ essere logicamente
realizzato senza contrappeso (per esempio con azionamento idraulico) ma che, se il
contrappeso • previsto, quest’ultimo deve muoversi nello stesso vano della cabina.
Il vano di corsa deve risultare:
completamente chiuso con pareti, pavimento di base e soffitti "ciechi" (cio• senza
fori passanti come avviene per le reti, lamiere forate ecc..)
il caso "particolare" in cui il vano stesso non debba partecipare alla protezione
dell’edificio contro il propagarsi dell’incendio (quindi praticamente, con
l’approvazione dei Vigili del Fuoco) le pareti laterali e la parete dorsale, pur sempre
cieche, possono avere altezza limitata a 2,5 m; la parete frontale pu‚ non essere cieca
al di sopra di 2,5 m rispetto al piano di sbarco e quindi sostituita da reti, lamiere forate
ecc.. (purchŠ i fori abbiano dimensioni inferiori a 75 mm, sia in senso orizzontale che
verticale) od anche non avere protezioni di sorta – sempre al di sopra di 2,5 m –
quando la porta di cabina sia bloccata con adatto dispositivo elettromeccanico
prevedibile, a richiesta, dal costruttore dell’ascensore.
Locale macchine: Il locale macchine • un locale posto in corrispondenza della parte alta,
o della parte bassa del vano di corsa destinato al macchinario ed al quadro di manovra
Gruppo motore-argano-freno:
Elettromagnete freno
Ceppi freno indipendenti
Volano
Riduttore argano
Puleggia motrice
Pagina 18 di 55
Motore: Il motore • una macchina elettrica che • in grado di trasformare l’ energia elettrica
in energia meccanica.
Esistono tre tipologie di motori utilizzati per gli ascensori e cio• asincroni, sincroni e in
corrente continua.
Per quanto riguarda i motori in corrente alternata sincroni ed asincroni, assieme all’utilizzo
del motore deve essere incorporato ad un’ inverter (le quali caratteristiche verranno esaminate
in seguito); mentre per i motori in corrente continua • necessario l’utilizzo di un regolatore.
La velocit‡ del motore in C.A. dipende dalla frequenza della tensione di alimentazione che
sono dei cicli di variazione di una grandezza in un secondo (50 hertz), e dalle coppie polari
ossia il numero di “terne” di avvolgimenti che costituiscono lo statore.
Principio di funzionamento motore asincrono trifase
I motori asincroni trifase, costituiscono la categoria tecnicamente più diffusa di motori
elettrici. Essi realizzano la più importante utilizzazione dei campi rotanti generati
mediante un sistema di correnti, e vengono perciò denominati anche motori a campo
rotante.
Il motore asincrono fu realizzato la prima volta da Galileo Ferraris (1885), quale
immediata conseguenza della sua scoperta del campo rotante.
Il funzionamento di questo dispositivo come motore deriva dal fatto che il campo rotante
induttore scorrendo di fronte alle singole generatrici del cilindro, vi genera delle correnti
indotte.
Il motore asincrono trifase viene alimentato da un sistema di tensioni trifasi cioè tre
tensioni che sono sfasate tra di loro di 120°.
stella di tensioni del sistema trifase
Pagina 19 di 55
La tensione di alimentazione del sistema trifase € di 400 V in valore efficace, alla
frequenza f = 50 Hz.
La parte fissa del motore € detta statore; la parte che pu• ruotare € detta rotore.
Sulla parte fissa del motore, lo statore, si trovano tre bobine doppie, le quali vengono
disposte l’una rispetto all’altra di 120ƒ.
Motore asincrono trifase
Tali bobine vengono alimentate dal sistema trifase di tensioni; vengono, quindi, percorse
da una certa corrente, e si ha luogo ad un campo magnetico variabile, generato ciascuno
dalle tre bobine. Nella zona compresa tra le tre bobine il campo magnetico sar„ la
somma dei tre campi magnetici delle tre bobine. Ma poich… le bobine sono collegate sullo
statore con un angolo meccanico pari a 120ƒ ed inoltre il sistema trifase di tensioni €
anche esso sfasato dal punto di vista elettrico di un angolo pari a 120ƒ elettrici, il campo
magnetico risultate non sar„ fisso ma sar„ variabile; questo campo magnetico ruota
attorno all’asse del motore con una frequenza fissa:
f = 50 Hz
Questo campo magnetico si dice campo magnetico rotante.
Motore sincrono trifase
E’ composto da uno statore con opportuni avvolgimenti alimentati dall’inverter, da magneti e
da un sensore che legge la posizione rotorica.
L’inverter utilizza questa informazione per alimentare le fasi statoriche in modo che il flusso
generato sia sempre quello dovuto, per cui:
* Il motore non perde il passo e ruota a velocit‡ costante al variare del carico;
* La tensione di alimentazione alle fasi • controllata in modulo e fase;
* Se perde il passo si ferma;
* La coppia • sempre massima e dipende solo dalla corrente statorica (in modo proporzionale
ad essa);
* Assomiglia al comportamento di un motore c.c. con eccitazione data dai magneti
permanenti.
Pagina 20 di 55
Rispetto al motore in corrente continua presenta parecchi vantaggi come l’assenza di
spazzole, i minori attriti, l’assenza di scintillio e di usura, la possibilit‡ di utilizzo negli
ambienti pericolosi, lo smaltimento migliore del calore, maggiore accelerazione, miglior
bilanciamento e velocit‡ ed inferiori dimensioni.
Oltre a tutti questi vantaggi bisogna per‚ anche evidenziare gli svantaggi i quali possono
essere la non sopportazione di correnti e temperature troppo elevate, la necessit‡ di encoder
particolari oppure il fatto che i motori multipolari a bassi giri ed alte coppie hanno bassi
rendimenti e quindi elevate correnti e per finire devono essere in esecuzione chiusa per evitare
attrazione da parte dei magneti di polvere e materiali ferrosi.
La frenatura di questa tipologia di motore pu‚ avvenire per dissipazione sulla resistenza
interna dei suoi avvolgimenti o su resistenza esterna all’inverter (classica resistenza di
frenatura) oppure con recupero energetico tramite un regolatore in grado di frenare il motore
generando energia per la rete di alimentazione.
Il motore sincrono opera tenendo conto che:
- La velocit‡ massima • limitata principalmente da fenomeni meccanici come cuscinetti,
distacco dei magneti ed attriti;
- La coppia massima dipende sia dalle limitazioni della corrente del circuito di
alimentazione che dai fenomeni di smagnetizzazione del rotore;
- Al crescere della velocit‡ aumenta la tensione del motore. Il limite di tensione
massimo dovuto all’alimentazione limita di conseguenza velocit‡ e coppia.
Motore in corrente continua
Con motori in corrente continua si possono raggiungere velocit‡ molto elevate, avvalendosi di
impianti gearless, cio• senza riduttore.
Per poter utilizzare questi motori • necessario interporre tra rete di alimentazione (alternata
trifase) e motore, un convertitore C.A.-C.C.
I motori C.C. richiedono una maggiore manutenzione rispetto agli altri e questo fa s‰ che i
costi aumentino.
Tali impianti non hanno alcun limite di portata o velocit‡, sono ad alto livello con un notevole
comfort di marcia e grande precisione di femata.
I principali inconvenienti sono:
a) La presenza di tre macchine rotanti (motore C.A., dinamo, motore C.C.) con bassi
rendimenti complessivi;
b) Un elevato rumore nel locale macchina;
c) L’elevato costo iniziale di installazione ed elevato costo di manutenzione.
Argano: L’argano • un macchinario costituito da un gruppo motore-argano-freno con un
motore alimentato da corrente elettrica continua o alternata, il cui asse accoppiato tramite un
giunto ad un riduttore che aziona un albero su cui • fissata la puleggia.
Freno: E’ un dispositivo a ganasce costituito da materiale d’attrito posto abitualmente in
corrispondenza del giunto fra argano e motore che contribuisce alla fermata della cabina e la
mantiene in posizione di fermo.
Puleggia: La puleggia • una ruota motrice o condotta che pu‚ svolgere varie attivit‡. La
puleggia di trazione, ad esempio, ha le funi alloggiate nelle sue gole che trascina per aderenza.
Le pulegge possono essere di “deviazione” se deviano le funi, o di “rinvio” se le rimandano
verso l’argano motore.
Pagina 21 di 55
Paracadute: Il paracadute • un dispositivo di sicurezza che serve a bloccare un ascensore
nel caso in cui la velocit‡ della cabina superi un certo limite prestabilito oppure si rompa o si
allenti una delle funi di sospensione.
Generalmente il paracadute • costituito da due robusti blocchi metallici posti di preferenza
nella parte inferiore della cabina in corrispondenza delle guide di scorrimento. Le guide
passano attraverso questi blocchi, che, in funzione del tipo, presentano una o piˆ superfici
inclinate convergenti rispetto alle superfici di scorrimento delle guide, in modo che l'elemento
o gli elementi di blocco (siano essi rulli, prismi metallici o altro) si incuneino saldamente in
modo da bloccare la cabina nella sua corsa in discesa. Il modo in cui gli elementi di blocco si
incuneano, determina la decelerazione che non deve essere pericolosa per gli occupanti. Il
paracadute • azionato meccanicamente da un limitatore di velocit‡ (di cui illustrer‚ il
funzionamento), oppure da un dispositivo di allentamento delle funi. Una volta che il
paracadute • attivato, per il suo sblocco • necessario l'intervento di una persona competente.
Durante l'intervento del paracadute, deve essere garantito che il pavimento della cabina col
carico uniformemente distribuito, non s’inclini oltre un determinato valore; inoltre un contatto
elettrico di sicurezza, deve togliere l'alimentazione alla macchina di sollevamento.
Limitatore di velocità: Il limitatore di velocit‡ rientra nella piˆ ampia categoria dei
dispositivi di regolazione. Un dispositivo di regolazione • un meccanismo a circuito chiuso
che, attivato automaticamente da una condizione di errore, interviene sui parametri di
funzionamento di una macchina. Nel contesto dell'ascensore, il limitatore di velocit‡ • un
dispositivo di sicurezza, utilizzato per rilevare e bloccare una condizione di eccessiva
velocit‡, cio• una situazione nella quale, per qualsivoglia motivo, la cabina viaggia al di sopra
di una certa velocit‡ prestabilita.
Vediamo ora com’• fatto un limitatore di velocit‡: essenzialmente • costituito da due pulegge
di diametro contenuto, collegate tra di loro da una funicella metallica (generalmente, nei tipi
destinati agli ascensori piˆ comuni, del diametro di 6 o 7 mm), poste all'interno del vano di
corsa oltre il limite superiore e quello inferiore della corsa della cabina. A sua volta, un lato
della funicella • interrotto ed i due capi sono collegati al paracadute posto al di sotto della
cabina dell'ascensore. Quindi, se immaginassimo di sezionare con un piano orizzontale il vano
di corsa, il complesso del limitatore di velocit‡ • posto lateralmente alla cabina, in modo da
non interferire con essa durante la marcia.
La puleggia superiore • il cuore del sistema, in quanto ad essa • applicato l'elemento sensibile,
che riconosce la situazione di pericolo. Questo elemento si attiva quando la forza centrifuga
che si sviluppa durante la rotazione della puleggia (che • trascinata dalla funicella che, come
abbiamo visto, • collegata alla cabina, e pertanto trasmette meccanicamente istante per istante
la reale velocit‡ della stessa) supera un certo limite; la forza centrifuga • generata in quanto
l'elemento sensibile percorre una traiettoria su un profilo di forma quadrata con angoli
smussati, solidale con la puleggia. In tal modo, la rotazione della puleggia si trasforma nel
caratteristico movimento lineare, da cui il nomignolo di "salterello", spesso utilizzato nel
gergo ascensoristico. Quando la forza generata dalla rotazione, a seguito di un aumento della
velocit‡ della cabina, aumenta oltre un certo limite, succedono due cose importantissime:
1) il salterello, a causa della maggiore escursione lineare, s’impegna meccanicamente in un
riscontro solidale con la puleggia del limitatore di velocit‡ e quindi lo blocca;
2) ed aziona un contatto elettrico di sicurezza a riarmo manuale che, tagliando la corrente di
manovra, di fatto interrompe l'alimentazione del macchinario di sollevamento.
Il punto 1) ha un’ulteriore implicazione: abbiamo visto che la puleggia si • bloccata, e con
essa si • bloccata la funicella, mentre la cabina dell'ascensore • ancora in marcia. La risultante
forza di trazione (che deve essere di intensit‡ adeguata e comunque non inferiore ai limiti
imposti dalle norme) si trasmette, tramite la fune, al paracadute, che interviene bloccando
meccanicamente la marcia della cabina.
Pagina 22 di 55
Pertanto, in caso di eccessiva velocit‡ della cabina, il limitatore di velocit‡ interviene in due
modi: elettricamente, interrompendo l'alimentazione del macchinario, e meccanicamente,
tramite il paracadute, bloccando la cabina.
La puleggia inferiore, il cui supporto • generalmente fissato ad una delle due guide di
scorrimento della cabina, • detta puleggia tenditrice, in quanto, attraverso una massa solidale
col supporto, assicura la corretta tensione della fune del limitatore di velocit‡.
Sebbene il limitatore di velocit‡ sia un mezzo previsto dalle norme per prevenire la caduta
libera o la discesa a velocit‡ eccessiva anche degli ascensori oleodinamici, generalmente esso
non viene utilizzato ed • sostituito da una valvola di blocco inserita nel circuito idraulico.
Per quanto riguarda gli ascensori a elettrici a fune, esso deve intervenire anche contro
l'eccesso di velocit‡ in salita, ed in questo caso il limitatore di velocit‡ deve essere del tipo
bidirezionale, cio• funzionante, secondo i medesimi criteri gi‡ citati, anche durante la marcia
in salita della cabina e capace di intervenire non appena la velocit‡ nominale sia stata superata
per un valore pari al 10%.
Guide cabina: Sono dei profilati di sezione adeguata per conformazione e resistenza
(normalmente a T), utilizzati per lo scorrimento della cabina, del contrappeso o del pistone
all’interno del vano di corsa.
Funi di sospensione: Corda costituita da fili d’acciaio a conformazione variabile. I fili
d’acciaio costituiscono dei cordini elementari detti trefoli che variamente avvolti fra loro
costituiscono la fune propriamente detta. La conformazione attualmente piˆ utilizzata per gli
ascensori e la cosiddetta Seale, a 6 o 8 trefoli avvolti intorno un’anima tessile interna
contenete una sostanza lubrificante.
Contrappeso: Il contrappeso rispetto alla cabina viene vincolato all’ estremit‡ opposta
delle funi, mantenendole in tensione, permettendo anche di ridurre notevolmente il lavoro
richiesto al motore, che si limita cos‰ al sollevamento della sola differenza di peso fra le due
masse ed inoltre evita voluminosi tamburi sui quali avvolgere le funi stesse.
Pagina 23 di 55
Ammortizzatori: Gli ammortizzatori vengono raggruppati in tre famiglie, caratterizzate
anche dalla velocit‡ nominale della cabina.
- Nel caso in cui la velocit‡ della cabina sia inferiore ad 1 m/s, • possibile installare
ammortizzatori ad accumulo di energia con caratteristica lineare o non lineare. Per
caratteristica dell'ammortizzatore, s’intende la curva che caratterizza graficamente il
legame che esiste tra la corsa (o schiacciamento) dello stesso ed il carico applicato.
Nel caso in cui esista una proporzionalit‡ diretta tra queste due grandezze, il
diagramma risultante • una retta, per cui la sua caratteristica • detta lineare.
- L'ammortizzatore ad accumulo di energia con caratteristica non lineare • costituito da
un tampone in poliuretano, che si deforma schiacciandosi sotto l'azione del peso della
cabina.
Questo tipo di ammortizzatore • di impiego sempre piˆ comune, poichŠ esso ha
dimensioni piˆ contenute rispetto a quelli a molla. Pertanto questa sua caratteristica
permette al progettista di ottimizzare ulteriormente il disegno della fossa del vano di
corsa.
- Per qualsiasi velocit‡ nominale degli ascensori, possono essere utilizzati gli
ammortizzatori a dissipazione di energia. In questo tipo di ammortizzatori vi • un
elemento elastico di contrasto, costituito usualmente da una molla, e da un fluido,
solitamente olio avente determinate caratteristiche, che ha il compito di assorbire
l'energia derivante dall'impatto. Allo stelo dell'ammortizzatore • collegato un elemento
meccanico che durante il suo movimento verticale, forza l'olio a passare dalla parte
inferiore a quella superiore della camera nella quale • contenuto. Il passaggio avviene
attraverso una serie di fori, e durante questo processo, l'energia viene dissipata
nell'olio stesso sotto forma di calore. Il movimento dello stelo dell'ammortizzatore
viene controllato da un contatto elettrico di sicurezza, che ha la funzione di
subordinare il funzionamento normale dell'ascensore al ritorno in posizione normale
estesa dell'ammortizzatore. Sul corpo dell'ammortizzatore • posizionata la bocchetta
per il rabbocco dell'olio ed un indicare ottico per il controllo del suo livello. Questo
tipo di ammortizzatori vengono utilizzati su ascensori aventi velocit‡ molto elevate.
Pagina 24 di 55
Inverter: Un inverter • un dispositivo elettronico in grado di convertire corrente continua in
corrente alternata eventualmente a tensione diversa, oppure una corrente alternata in un'altra
di differente frequenza.
Le applicazioni sono molteplici:
Nei gruppi di continuit‡ convertono la tensione fornita dalla batteria in corrente
alternata
Nell’industria sono usati per regolare la velocit‡ dei motori elettrici.
Nella trasmissione dell’energia elettrica convertono l’energia in corrente
continua trasferita in alcuni elettrodotti per essere immessa nella rete in corrente
alternata.
Il tipo piˆ semplice di inverter
consiste in un oscillatore che pilota
un transistor, il quale aprendo e
chiudendo un circuito genera un’onda
quadra. L’onda • quindi applicata ad
un trasformatore che fornisce
all’uscita la tensione richiesta
arrotondando in qualche misura
l’onda quadra. Spesso al posto del
transistor comune sono utilizzati
dispositivi piˆ efficienti quali il
MOSFET, il tiristore o l’IGBT.
La forma d’onda quadra generata da
questi dispositivi ha il problema di
essere ricca di armoniche superiori,
mentre l’onda sinusoidale della rete
elettrica ne • priva.
Ci‚ comporta una minore efficienza delle apparecchiature alimentate, maggiore
rumorosit‡ sia sonora sia elettrica, e seri problemi di compatibilit‡ elettromagnetica.
Nei motori asincroni la velocit‡ di rotazione • direttamente legata alla frequenza della
tensione di alimentazione. Ovunque sia necessario variare la velocit‡ di un motore
vengono usati inverter da corrente alternata a corrente alternata (CA-CA).
In questi sistemi la tensione in entrata viene dapprima convertita in corrente continua da
un raddrizzatore e livellata da condensatori, quindi applicata alla sezione di inversione.
Lo scopo di questa doppia operazione • unicamente quella di variare la frequenza a
piacere entro un intervallo prestabilito e non • necessaria la presenza di un
trasformatore, poichŠ non • necessario variare il valore della tensione in uscita che
rimane uguale a quella in ingresso.
La frequenza di uscita • determinata nei casi piˆ semplici da un segnale analogico
fornito agli inverter per esempio da un potenziometro, oppure da un segnale digitale
inviato da un PLC.
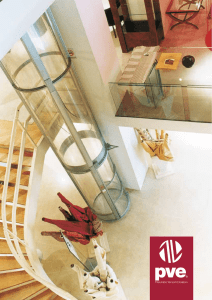
PRINCIPIO DI FUNZIONAMENTO DELL’INVERTER
La corrente di rete trifase alternata • convertita in corrente continua tramite un ponte trifase a
diodi (1), livellata da un condensatore (2) e successivamente ritrasformata in alternata da un
ponte ad IGBT con valori di frequenza e tensione variabili a piacere in un determinato range.
Pagina 25 di 55
1 = Ponte a diodi trifase (convertitore CA/CC)
3 = Unità di frenatura interna
5 = Convertitore di tensione e frequenza (CC/CA)
DC = Induttanza lato tensione continua
2 = Condensatore
4 = Resistenza di frenatura
AC = Induttanza lato tensione alternata
Cavo flessibile: I collegamenti tra il quadro di manovra e le apparecchiature poste nel vano
corsa (bottoniere di piano, serrature, invertitori, interruttori di extracorsa) vengono
normalmente eseguiti con idonei cavi contenuti in idonee protezioni (linee elettriche fisse).
Invece i collegamenti tra il quadro e le apparecchiature poste sulla cabina mobile (bottoniera
di comando, contatti delle porte – contatto paracadute e allentamento delle funi – lampade di
illuminazione – eventuale motore apri-porta – ecc.) sono effettuati con cavi flessibili. Tali
linee sono chiamate linee elettriche mobili.
Essi partono da una morsettiera posta sotto la cabina e vanno ad un’altra morsettiera fissa
posta a met‡ corsa o direttamente sul quadro di manovra nel locale argano.
Tipi di conduttore ammesse e alimentazione quadro
Per i circuiti di forza motrice del macchinario sono impiegabili solo cavi con guaina per posa
fissa scelti tra quelli normalizzati CENELEC HD21-S2 ed HD22-S2 (cavi isolati con tensione
nominale fino a 450/750V tipo H07RN e similari).
I cavi del tipo senza guaina (H07V-V, H07V-R, H07V-K, H05V-V, HO5V-K) possono essere
impiegati per tutti gli altri circuiti purchŠ siano installati in tubazioni o canalizzazioni
protettive.
I cavi rigidi possono essere installati solo in modo fisso, aggraffati a parete o installati entro
tubi, canalette od altri sistemi di supporto e protezione equivalente.
I cavi flessibili normali possono essere installati solo entro tubi canalette o equivalenti.
I cavi flessibili sotto guaina pesante, conformi ai tipi HD22-4 S2 (H07RN-F), possono essere
impiegati sia per impianti fissi sia per l'alimentazione degli apparecchi mobili (esclusa la
cabina che richiede tipi UD359 e HD360).
Tutte le connessioni devono essere racchiuse in involucri adeguati (quadri, cassette, scatole) e
deve essere impedita mediante separazione, la connessione fortuita fra circuiti incompatibili ai
fini della sicurezza (specialmente quando esiste il pericolo di invalidare un circuito di blocco).
La resistenza di isolamento tra conduttori e tra conduttori e la terra deve essere maggiore di
1000 Ω/V con un minimo di 500 kΩ per i circuiti di forza motrice e di sicurezza e di 250 kΩ
per gli altri circuiti.
E' vietato l'uso del conduttore PEN (neutro e terra comuni).
Pagina 26 di 55
Quadro generale e locali tecnici: Questo quadro • generalmente ubicato nei locali del
macchinario al servizio di un solo ascensore. Deve contenere almeno:
interruttore unipolare atto ad interrompere tutti i conduttori attivi d'alimentazione
dell'ascensore con esclusione della illuminazione ed eventuale ventilazione della cabina;
un interruttore unipolare per luce e ventilazione cabina;
un interruttore per i circuiti che alimentano gli altri locali tecnici pertinenti all'ascensore (vano
corsa, locale macchine, locale pulegge, fossa, ecc.).
In ogni caso i circuiti pertinenti ai vani tecnici devono essere indipendenti da quelli della
cabina e ubicati su distinti pannelli in modo da evitare possibili confusioni.
Davanti al quadro elettrico, nel locale macchina, deve essere libero un volume di manovra
delimitato dalle seguenti dimensioni:
altezza ≥ 1,8 m;
larghezza ≥ alla larghezza totale del quadro con minimo di 0,5 m;
profondit‡ ≥ 0,7 m davanti al quadro riducibile a 0,6 m in corrispondenza degli organi di
manovra.
Le vie di accesso al quadro non devono avere larghezza inferiore a 0,5 m e altezza inferiore a
1,8 m (se non esistono parti in movimento la larghezza pu‚ essere ridotta a 0,4 m).
Il rel• di piano: Trattasi essenzialmente di un’elettrocalamita che chiude il circuito di
manovra fino a quando • percorsa dalla corrente elettrica. In tal modo premendo il pulsante
per andare ad un certo piano si eccita un teleruttore posto sul circuito di potenza (o
d’alimentazione) del motore.
Per mantenere chiuso il circuito di manovra ed eccitato il teleruttore senza tener sempre
premuto il pulsante del piano, occorre dotare il rel• di piano di un circuito elettrico di ritenuta,
che provveda a mantenere eccitato il rel• stesso, dopo aver premuto il pulsante, che si riapre
automaticamente.
In figura • illustrato tale circuito; una volta premuto il pulsante P, per inviare la cabina ad un
certo piano, la bobina R si eccita e chiude il contatto C, chiudendo il pulsante P, che ora pu‚
ritornare nella posizione originaria, senza riaprire il circuito, dato che ormai • cortocircuito.
Il circuito di manovra rester‡ chiuso ed il rel• R di detto piano eccitato, sino a che non
interviene un evento esterno ad interrompere la corrente ed a diseccitare il rel•; tale intervento
• dato dall’invertitore sempre del piano in questione.
Ovviamente sul quadro di manovra degli ascensori, oltre al trasformatore di manovra, al
salvamotore, ed ai teleruttori salita e discesa ci saranno fissati tanti rel• di piano per quanti
sono i piani da servire, oltre ad altre apparecchiature.
Pagina 27 di 55
Trasformatori di manovra: Il circuito di manovra • a bassa tensione ed il circuito che
alimenta il motore di sollevamento • ad una tensione piˆ alta.
I due circuiti devono essere separati e distinti.
Un trasformatore di manovra, che deve diminuire la tensione, • costituito da un avvolgimento
primario e da un avvolgimento secondario, ciascuno dei quali • costituito da spire avvolte su
di un nucleo di materiale ferromagnetico (in genere costituito da lamine di ferro impacchettate
ad anello). Nei trasformatori riduttori, vale a dire quelli in cui la tensione di uscita • minore di
quella d’entrata, il circuito secondario di uscita ha un numero N2 minore di spire di quelle N1
del circuito primario o di entrata.
Pagina 28 di 55
I due avvolgimenti non sono in contatto diretto fra loro, ma sono accoppiati solamente da un
flusso magnetico in quanto le lamine sono tra loro isolate tramite una lacca. La corrente
alternata alla tensione V1, che entra nel primo avvolgimento di N1 spire crea un flusso
magnetico variabile come la corrente alternata che l’alimenta; di conseguenza nel secondo
circuito, che ha N2 spire, nasce una corrente alternata indotta, con una tensione V2, proprio
del flusso magnetico del primo avvolgimento.
IL COLLEGAMENTO A TERRA DEL CIRCUITO SECONDARIO DEL
TRASFORMATORE
Il circuito di manovra di un ascensore • disposto lungo il circuito secondario del trasformatore
di manovra; sul ramo di ritorno di detto circuito, nelle vicinanze del trasformatore, • di norma
collegato a terra.
Questo collegamento a terra • chiamato di protezione perchŠ se un componente qualsiasi
accidentalmente o per un guasto va a massa, il circuito si chiude fra la massa predisposta del
collegamento a terra e la massa accidentale.
In tal modo non • possibile escludere le protezioni disposte lungo il circuito di manovra,
evenienza che, ad esempio, potrebbe avvenire fra le masse di due componenti, se non fosse
stata predisposta la terra di sicurezza.
Dato che la resistenza di terra • piccola, per la legge di Ohm si ha un grande amperaggio, tale
da far scattare le valvole di protezione sul secondario del trasformatore e cos‰ provocare
l’apertura del circuito di manovra ed il conseguente arresto del macchinario.
Pagina 29 di 55
Salvamotori magneto-termici: I salvamotori sono in genere magneto-termici. In
pratica se si ha un dato incremento dell’intensit‡ della corrente, un’elettrocalamita attira
istantaneamente un elemento che apre il circuito; se invece l’intensit‡ di corrente non
raggiunge questo valore, ma aumenta in modo che lentamente riscalda il circuito, c’• un
elemento che dilatandosi determina l’apertura del circuito.
Invertitori di piano di tipo meccanici: Dal punto di vista funzionale essi sono
costituiti da una leva L imperniata in I che muovendosi pu‚ assumere tre diverse posizioni,
quella verticale (posizione 2) o girata a sinistra (posizione 1) o a destra (posizione 3), cos‰ da
realizzare contatti elettrici diversi e fare in modo da poter eccitare il contattore (teleruttore) di
salita o di discesa.
Ogni piano ha il suo invertitore azionato da una slitta S, solidale alla cabina, che al suo
passaggio agisce contro il rullo di gomma R della leva dell’invertitore (Fig. 4). Gli invertitori
dei piani estremi dovendo ovviamente consentire solo un comando, la discesa o la salita,
hanno due sole posizioni rispettivamente o la 2 e la 1 o la 2 e la 3.
La slitta ha la forma riportata in figura 4 perchŠ al passaggio della cabina deve poter spostare
la leva da sinistra a destra o viceversa. Se invece la cabina si ferma al piano, il rullo R si trova
dentro la parte verticale della slitta e pertanto anche la leva L dell’interruttore • verticale, cio•
nella posizione 2.
Ovviamente le leve degli invertitori dei piani inferiori sono spostate in modo da consentire la
discesa della cabina, sono quindi pronte a permettere il passaggio della corrente per eccitare il
contattore di discesa, mentre le leve dei piani superiori sono pronte a far salire la cabina, e
cio• ad eccitare il teleruttore di salita.
Pagina 30 di 55
Selettore di manovra: • un dispositivo che riunisce in un solo complesso tutti gli
invertitori dei vari piani. • azionato mediante riduzioni in modo da riprodurre in scala ridotta
e con estrema precisione il moto della cabina nel vano corsa e pertanto i vari circuiti si aprono
e si chiudono come accadrebbe se la cabina nel vano corsa azionasse direttamente gli
invertitori ai vari piani.
Contatti vari: Com’• noto sia le portine della cabina sia le porte ai piani se sono aperte
sono dotate di contatti che mantengono aperto il circuito di manovra e non fanno quindi
eccitare i teleruttori e partire l’ascensore.
Esistono inoltre altri contatti idoneamente disposti sul circuito di manovra, fra questi
ricordiamo:
a) Il pulsante dell’ALT installato sulla bottoniera di cabina degli ascensori preesistenti al 1999
e di arresto sopra il tetto della cabina, sulla cosiddetta bottoniera di manutenzione o della
selettiva o d’ispezione;
b) Il contatto per allentamento o rottura delle funi di sollevamento e il contatto per
l’apparecchio contro eccesso di velocit‡ (in pratica di quell’apparecchio chiamato
comunemente paracadute che blocca con idonei cunei la cabina sulle sue guide);
c) Contatto del fondo mobile della cabina.
Serrature delle porte ai piani: Le serrature sono un dispositivo meccanico idoneo ad
impedire l’apertura delle porte di piano con cabina non presente.
Sono dotate dal punto di vista elettrico, di due contatti di sicurezza disposti sul circuito di
manovra:
1. Il contatto preliminare, che • un primo contatto di sicurezza disposto in varie maniere, che
si chiude sul circuito di manovra all’atto della chiusura della porta di piano;
2. Il contatto di blocco che si chiude sul circuito di manovra solo se • entrato il blocco
meccanico della serratura stessa (il cosiddetto catenaccio di blocco).
Con la cabina ferma davanti al piano, il pattino retrattile sposta la leva della serratura e cos‰
comanda l’uscita del catenaccio di blocco e consente l’apertura delle porte.
Porte automatiche: Per quanto riguarda il circuito di manovra, occorre che le porte ai
piani e di cabina, automatiche o no, siano chiuse perchŠ i relativi contatti di sicurezza
consentano la partenza della cabina.
Per l’automatismo del movimento di apertura e chiusura occorre un “operatore”, cio• un
adatto motore elettrico ed una idonea trasmissione del moto che • posto sul tetto della cabina.
L’inserzione del motorino (cos‰ • chiamato dagli ascensoristi perchŠ ovviamente • di piccola
potenza) apri-porte avviene mediante contattori appositi (cio• teleruttori) alimentati da un
circuito derivato a monte dei contatti di sicurezza delle porte della cabina; l’arresto, quando le
porte sono completamente chiuse o aperte, viene ottenuto mediante contatti che controllano il
circuito di cui sopra.
L’impianto • detto a porte semiautomatiche, quando l’automatismo • limitato al comando
delle sole porte della cabina; negli impianti a “porte automatiche” l’automatismo • esteso
anche a quelle dei piani.
Il movimento delle porte di piano avviene mediante un accoppiamento fra queste e la porta
della cabina che le trascina.
Pagina 31 di 55
Dispositivo bidirezionale: Oggi la Direttiva Ascensori 95/16/CE, al punto 4.5, stabilisce
che "Le cabine devono essere munite di mezzi di comunicazione bidirezionali che consentano
di ottenere un collegamento permanente con un servizio di pronto intervento".
I requisiti principali che costituiscono la base per la progettazione di un moderno dispositivo
di allarme sono:
- Il dispositivo deve garantire che l'allarme sia emesso sino al suo riconoscimento da
parte del servizio di soccorso;
- Il dispositivo deve indicare al servizio di soccorso, che l'allarme • risolto e che non ci
sono piˆ utenti intrappolati;
- Il sistema di allarme deve essere efficiente anche in caso di guasto dell'alimentazione
elettrica, quindi viene impiegato un sistema di alimentazione di emergenza con
batterie ricaricabili;
- Nella cabina dell'ascensore deve essere presente un segnale visibile ed udibile che
informa i passeggeri che l'allarme • effettivo;
- Il dispositivo deve identificare in modo univoco l'ascensore dal quale proviene il
segnale di allarme; dopo l'attivazione del dispositivo, il passeggero intrappolato non
deve compiere ulteriori azioni e non deve poter interrompere la comunicazione
bidirezionale;
- Il dispositivo di allarme deve essere in grado di emettere informazioni di allarme
anche verso un sistema di ricezione alternativo;
- Il dispositivo di allarme deve essere installato in luoghi non accessibili ai passeggeri
ed i suoi parametri di funzionamento devono essere protetti da mezzi adeguati, come
ad esempio, i codici di accesso.
Dispositivi di emergenza: all’impianto devono essere applicati i seguenti dispositivi di
emergenza:
Interruttore di emergenza
E’ un dispositivo della linea di alimentazione del motore ubicato nel locale portineria oppure,
se l'edificio • privo di personale di custodia, al pianterreno in prossimit‡ dell'ascensore, deve
essere contenuto in custodia protetta da lastra frontale trasparente frangibile. Oggi non • piˆ
obbligatorio, salvo in caso di particolari prescrizioni antincendio.
Allarme
Una suoneria a suono forte comandabile dalla cabina costituisce un impianto di allarme
generalmente impiegato quando la corsa dell'ascensore non supera i 30 m.
L'alimentazione deve essere ottenuta da una batteria di accumulatori caricata in tampone con
autonomia di almeno 2 ore nel caso l’impianto rimanga bloccato con assenza di corrente.
Citofono
Quando la corsa dell'ascensore supera i 30 m occorre predisporre un collegamento citofonico
tra la cabina ed il locale macchine per consentire le operazioni di manutenzione, riparazione e
messa a punto.
In tal caso conviene utilizzare l'impianto citofonico anche come allarme prevedendo un terzo
apparecchio in portineria.
Interruttore di arresto ascensore nella fossa, sul tetto della cabina e nel locale pulegge.
Devono impedire la messa in funzione accidentale del motore della cabina durante i lavori di
manutenzione o riparazione. In genere per questo tipo di arresto viene impiegato un
interruttore di tipo a “fungo”.
Pagina 32 di 55
Illuminazione vano corsa
Il vano corsa, se di tipo chiuso, deve avere un proprio impianto di illuminazione
comprendente almeno 2 lampade: la prima a non piˆ di 50 cm dal punto piˆ alto e la seconda
a non piˆ di 50 cm dal punto piˆ basso.
Per vani corsa lunghi piˆ di 8 m occorre interporre altre lampade in modo che l'interdistanza
non sia mai superiore a 7 m. In particolare • oggi richiesto un illuminamento minimo di 50
lux sul tetto di cabina e nelle zone in cui sono previste operazioni di manutenzione.
Illuminazione del locale macchine e del locale pulegge
L'impianto d'illuminazione deve garantire almeno un illuminamento di 200 lux misurati al
piano del pavimento.
Illuminazione della fossa e degli altri locali tecnici
Si consigliano illuminamenti non inferiore a 100 lux.
L'interruttore di accensione va installato all'interno dei locali in prossimit‡ dell'ingresso.
Illuminazione della soglia in prossimitƒ della porta di piano e degli accessi ai locali
tecnici
Deve essere realizzata con impianto fisso, facente parte dei circuiti generali della casa, e
garantire un illuminamento misurato al piano del pavimento non inferiore a 50 lux.
Prese di corrente
Per potere effettuare lavori di manutenzione, sul tetto della cabina, nel locale pulegge, nel
locale macchinario e nella fossa si devono installare gruppi di prese bipolari piˆ terra 230V da
10 e 16A comprendenti anche i tipi CEE.
Protezione dei passaggi verticali
Le aperture praticate per il passaggio dei cavi nel locale macchine e nel locale pulegge
sovrastanti il vano corsa devono essere protette da opportuni manicotti. Questi manicotti, atti
ad impedire la caduta di oggetti, devono essere serrati attorno ai cavi e sporgere dal
pavimento per almeno 5 cm.
QUADRO ELETTRICO E FUNZIONAMENTO ASCENSORE A
RELE’
Il quadro elettrico • la combinazione, in un unico complesso, di apparecchiature elettriche
destinate a svolgere, in un impianto elettrico, funzioni di protezione e di manovra, con gli
eventuali relativi dispositivi di comando, misura, segnalazione.
Il funzionamento del quadro elettrico a rel• come molti sapranno si tratta di una tecnologia
ormai superata. Tuttavia molti degli impianti nei quali • stata impiegata sono tuttora in
funzione. L'impianto elettrico di un' ascensore • normalmente alimentato da una linea 230V,
che alimenta la luce ed il circuito di allarme e da una linea 400V; da quest' ultima, oltre
l’alimentazione del motore, derivano i circuiti di segnalazione, di alimentazione degli
elettromagneti e di manovra. Nello schema riportato in figura all'inizio del circuito di
manovra troviamo la catena delle sicurezze preliminari, ovvero interruttori di extracorsa che
intervengono nel caso in cui la cabina oltrepassi il livello dei piani estremi (per esempio a
causa di un guasto al freno, l'inceppamento di un contattore, l'eccessivo slittamento tra funi e
puleggia dovuto ad usura). Negli impianti a fune vengono installati sia a piano terra che
all'ultimo piano e si ripristinano automaticamente non appena la cabina viene riportata a
livello del piano. Negli impianti oleodinamici vengono installati solo all'ultimo piano ed in
caso di intervento occorre ripristinarli manualmente; questo perchŠ la tenuta delle guarnizioni
Pagina 33 di 55
non • mai perfetta e di conseguenza la cabina potrebbe riportarsi a livello nel giro di qualche
ora (l'auto ripristino dell'impianto non • ammesso dalle normative). I contatti di accostamento
delle porte dei piani abilitano il comando dell'ascensore solo quando le porte di piano sono
accostate; la marcia della cabina • comunque subordinata al consenso di un'altra catena di
contatti. Il contatto del paracadute sulla cabina viene azionato da un dispositivo che impedisce
alla cabina di precipitare (in pratica rimane “aggrappata” alle guide) in caso di grave guasto
meccanico; poi abbiamo la valvola automatica che oltre a proteggere l' alimentatore dalle
sovracorrenti svolge un' altra importante funzione, che • quella di interrompere il circuito di
manovra al verificarsi di un problema di isolamento, specie sui contatti delle porte (il negativo
del raddrizzatore • collegato a massa); questa circostanza sarebbe molto pericolosa in quanto,
se si verificasse in piˆ punti della serie, la cabina potrebbe muoversi con le porte aperte.
I contatti dei catenacci assieme ai contatti di accostamento costituiscono le sicurezze delle
porte di piano; ciascuno di questi contatti risulta chiuso quando la relativa porta • bloccata. La
cabina • munita di un pattino retrattile azionato da un elettromagnete. Quando quest'ultimo •
diseccitato (impianto a riposo) e la cabina si trova al piano, il pattino va ad impegnare la leva
del catenaccio, sbloccando la porta.
LE PROVE DI ISOLAMENTO
Per eseguire le prove di isolamento di un impianto ascensore • necessario portare la cabina
fuori piano per avere tutti i contatti del circuito di sicurezza chiusi, ad esempio contatti
preliminari delle porte di piano e i blocchi serrature;
La seconda cosa necessaria per eseguire la prova • togliere la tensione al motore e al circuito
luce di cabina;
Scollegare il circuito di manovra dell’impianto di messa a terra;
Spostare il selettore del multimetro sulla misura della resistenza in megaohm;
Collegare un puntale dell’ohmetro (quello di colore nero) ad una massa esterna come ad
esempio la carcassa del motore o il centro della presa di corrente nel caso sia messa a terra per
verificare che siano tutte collegate fra loro;
Mantenendo il puntale a massa, con il puntale rosso testare tutti i circuiti (F.M., manovra,
segnalazioni luminose, della luce di cabina, di allarme ed eventuale operatore porte se
l’impianto • dotato di porte automatiche) che siano isolati dalla massa;
Staccare il puntale nero dalla massa esterna e collegarlo ad un morsetto del circuito di
manovra e ripetere la prova testando tutti gli altri circuiti (F.M., luminose, allarme, luce
cabina ed eventuale operatore porte);
Infine per completare la prova bisogna staccare il puntale nero del multimetro dal morsetto
del circuito di manovra e collegarlo ad uno dei restanti circuiti e testarli ripetendo la prova per
ognuno di essi.
CIRCUITO
MORSETTI IN PROVA
NOTE
FORZA MOTRICE
M1 - M2
Chiudere i teleruttori di marcia
LUCE
FL - FN
MANOVRA
20 – 28 – 24 – 32 – 33 – 40 – 50
FRENO E PATTINO RETRATTILE
70 - 80
SEGNALAZIONE
100 – 122 -12
ALLARME
+ 12 – AL
Chiudere i teleruttori di marcia
Pagina 34 di 55
E’ bene ricordare che il valore della resistenza di isolamento di ogni circuito • regolato da
apposite norme, qui di seguito riportate:
- D.P.R. 1497/63 - Art. 10 (impianto elettrico)
La resistenza di isolamento (in ohm) di ogni circuito, verso altri circuiti, o verso la
terra, deve essere non minore di 2000 volte la tensione nominale del circuito (in volt),
con un minimo di 250000 ohm (0,25 MΩ).
- D.M. 587/87 e D.P.R. 268/94 - Art. 13 (installazioni e apparecchiature elettriche)
La resistenza di isolamento tra conduttori e tra conduttori e terra deve essere maggiore
di 1000 Ω/V con un minimo di 500000 Ω per i circuiti di forza motrice e i circuiti dei
dispositivi elettrici di sicurezza, mentre deve essere di 250000 Ω per tutti gli altri
circuiti come quelli di comando, d’illuminazione e dei segnali.
- EN 81-1 ed EN 81-2 – Art. 13 (installazioni e apparecchiature elettriche
La resistenza di isolamento deve essere misurata tra ciascun conduttore attivo e la
terra. I valori minimi della resistenza di isolamento devono essere ricavati dalla
seguente tabella:
Tensione nominale
(V)
SELV
≤ 500
500
RESISTENZA DI ISOLAMENTO
Tensione di prova (c.c.)
Resistenza di isolamento
(V)
(MΩ)
250
≥ 0,25
500
≥ 0,5
1000
≥ 1,0
SISTEMI DI MANOVRA
La scelta appropriata del sistema di manovra • determinante nei riguardi della efficienza del
trasporto e va effettuata con particolare attenzione, avendo conoscenza dei sistemi
fondamentali che risultano tradizionalmente di maggiore impiego nelle diverse condizioni di
traffico e che sono illustrate qui di seguito:
Automatica a pulsanti
Secondo la definizione UNI, "la manovra normale • la manovra automatica piˆ semplice, con
essa la cabina risponde ad una chiamata dai piani soltanto se disponibile (cabina ferma, porte
dei piani chiuse) e resta a disposizione dei passeggeri in cabina fino alla fine della corsa".
Questo tipo di manovra • particolarmente adatto agli ascensori singoli con traffico di
modesta entità, abitazioni con pochi piani, case di riposo, piccoli ospedali e case di cura con
corse brevi.
Collettiva in discesa
Secondo la definizione UNI, "la manovra collettiva per scendere permette la registrazione
delle chiamate dai piani, a cabina disponibile o no. La registrazione delle chiamate ai piani si
effettua premendo sull'unico pulsante che si trova su ciascun piano. Se la cabina • libera o in
discesa, essa risponde alle chiamate dal piano piˆ alto, poi successivamente alle altre, durante
il suo tragitto in discesa verso il piano principale. I comandi in cabina sono registrati
istantaneamente ed eseguiti nell'ordine logico, in base al senso di movimento della cabina".
Pagina 35 di 55
Questo tipo di manovra • indicato in condizioni di traffico leggero negli edifici il cui flusso
dei passeggeri si dirige prevalentemente dal piano principale ai piani superiori, in salita, e da
questi al piano principale, in discesa; quindi, trova prevalente impiego negli edifici
residenziali e nei piccoli alberghi, essendo invece sconsigliabile quando sia previsto un certo
traffico tra i vari piani (ad esempio, in edifici occupati da una singola Societ‡).
Collettiva completa
Anche questa manovra, permette la registrazione delle chiamate dai piani "a cabina
disponibile o no". L'UNI precisa che "la manovra richiede due pulsanti di chiamata a ciascuno
dei piani intermedi - uno per la salita e uno per la discesa - in modo che l'utente possa premere
il pulsante per il senso verso il quale desidera spostarsi (solo un pulsante ai due piani
estremi)", mentre "le chiamate dai piani ed i comandi in cabina vengono eseguiti nell'ordine
logico, in base al senso di spostamento della cabina".
Con questo tipo di manovra, ed anche con la "collettiva in discesa", • da raccomandarsi
l'impiego del collegamento "in duplex" per coppie di ascensori (affiancati o contrapposti).
Con tale collegamento, risponde alle chiamate provenienti dai piani, quella delle due cabine
che si trova in posizione piˆ favorevole o addirittura in arrivo nel senso di marcia richiesto.
Lo stesso criterio vale per i gruppi di tre o quattro ascensori (collegamenti "triplex" o
"quadruplex", ecc.). E' chiaro che, in tal caso, il numero di corse occorrenti per smaltire un
determinato traffico diminuisce ulteriormente, risultando ridotto il tempo di attesa per gli
utenti.
MESSA IN SERVIZIO
Un ascensore deve essere progettato, costruito e provato secondo una delle procedure
prefissate, che prevedono in generale o la garanzia di qualit‡ da parte della ditta costruttrice, e
in questo caso • essa stessa che provvede tra l’altro anche al controllo finale dell’impianto,
oppure la costruzione da parte di una ditta sprovvista della garanzia di qualit‡, con la
valutazione di conformit‡ finale affidata ad un Organismo notificato, autorizzato dal
Ministero competente.
In tutti e due i casi il costruttore appone la marcatura CE, riportata sulla targa in cabina, redige
la dichiarazione di conformit‡, allegando le dichiarazioni di conformit‡ dei componenti
cosiddetti di sicurezza dell’impianto, che riportano anch’essi la marcatura CE, rilascia la
documentazione di uso e manutenzione, secondo le modalit‡ previste.
Per la messa in esercizio, gli ascensori al termine della procedura di valutazione vanno
sottoposti ad un esame finale, comprendente esame a vista e prove, per verificarne la
conformit‡ al progetto e alle norme.
L’esame a vista, oltre che della completezza della documentazione tecnica di cui si dir‡ dopo,
deve accertare che i singoli componenti e l’intera installazione corrispondano a quelli previsti
dal progetto e dalle certificazioni e che gli stessi componenti siano stati messi in opera senza
danneggiamenti.
Le prove, che comportano anche misure strumentali, per quanto riguarda l’argomento in
oggetto, e cio• il solo macchinario, devono interessare soprattutto gli aspetti seguenti, riportati
in modo sintetico:
• dispositivi elettrici di sicurezza;
• misura della potenza e corrente del motore e della velocit‡ della cabina;
• misura della resistenza d’isolamento e prova di continuit‡ verso terra dell’impianto
elettrico;
• verifica dell’aderenza delle funi di trazione;
Pagina 36 di 55
• sistema di frenatura;
• interruttori di extracorsa;
• limitatore di velocit‡ e paracadute;
• dispositivo contro l’eccesso di velocit‡ della cabina;
• dispositivo di allarme;
• limitatore del tempo di alimentazione del motore;
• limitazione della corsa del pistone, per gli idraulici;
• valvola di sovrappressione, per gli idraulici;
• valvola di blocco della discesa del pistone o valvola limitatrice di flusso, per gli
idraulici;
• rilevatore della temperatura, per gli idraulici;
• sistema elettrico antideriva, per gli idraulici.
La messa in esercizio di un ascensore va comunicata al Comune competente per territorio, il
quale gli attribuisce un numero di matricola, che contrassegner‡ l’impianto per tutta la sua
vita.
MANUTENZIONE
La manutenzione richiede una pianificazione, tenendo conto della regola dell’arte, anche alla
luce della diffusa esperienza in materia, e soprattutto basandosi sulle disposizioni legislative e
sulle norme tecniche, queste ultime rappresentate in Italia praticamente dalle norme dell’UNI.
Il piano della manutenzione viene redatto dal costruttore dell’impianto, il quale ne fissa le fasi
partendo da un’accurata valutazione del rischio, in modo da garantire che il rischio residuo
risulti non superiore a quello ritenuto tollerabile, basata su un’abbondante disponibilit‡ di dati
sul tasso di guasto dei componenti impiegati.
La definizione di manutenzione • data dalla Norma UNI 10147 “Manutenzione.
Terminologia” ed • la seguente: “La manutenzione • la combinazione di tutte le azioni
tecniche ed amministrative volte a mantenere o a riportare un’entit‡ (nel nostro caso
l’ascensore e i suoi componenti) in uno stato in cui possa eseguire la funzione richiesta”. La
Norma UNI EN 13015 d‡ una definizione leggermente diversa ma dallo stesso significato e
precisamente “La manutenzione • costituita da tutte le operazioni necessarie per garantire il
sicuro e previsto funzionamento dell’impianto e dei suoi componenti dopo l’ultimazione
dell’installazione e per tutto il suo ciclo di vita”. In modo diverso, si pu‚ anche dire che la
manutenzione deve garantire che l’impianto durante la sua vita mantenga i requisiti di
sicurezza e funzionalit‡ previsti dal progetto e dalle norme in vigore.
Tra le altre, la classificazione dei tipi di manutenzione che piˆ interessa negli ascensori si pu‚
ricondurre alla seguente:
• preventiva, intesa come “La manutenzione eseguita a intervalli predeterminati o in accordo a
criteri prescritti e volta a ridurre la probabilit‡ di guasto o la degradazione del funzionamento
di un’entit‡”;
• correttiva o a guasto, intesa come “La manutenzione eseguita a seguito della rilevazione di
un’avaria e volta a riportare un’entit‡ nello stato in cui essa possa eseguire una funzione
richiesta”.
L’obbligo della manutenzione, oltre che dalle citate norme di legge e tecniche di applicazione
generale, per gli ascensori scaturisce in particolare dal DPR 162/99, il quale stabilisce che
l’ascensore pu‚ essere tenuto in esercizio solo se affidato ad un manutentore, che deve essere
abilitato. Il manutentore deve eseguire, tra l’altro:
periodicamente la manutenzione preventiva;
la riparazione o sostituzione delle parti difettose (manutenzione correttiva);
le verifiche semestrali dei componenti di sicurezza, delle funi, ecc.;
la messa fuori servizio dell’impianto in caso di pericolo.
Pagina 37 di 55
Di seguito vengono sinteticamente esaminati i due tipi di manutenzione.
Manutenzione preventiva
L’ascensore per svolgere le sue funzioni ha bisogno soprattutto della manutenzione
preventiva, cos‰ si riduce quella correttiva, garantendo maggiore sicurezza e funzionalit‡. La
manutenzione preventiva va prevista dal costruttore dell’impianto, in relazione alle peculiari
esigenze dell’impianto e ai guasti prevedibili, e riportata nel piano di manutenzione e quindi
nelle istruzioni del manuale di uso e manutenzione. Per i contenuti delle istruzioni si pu‚
utilmente tener conto di quelli dettati soprattutto dalla citata Norma UNI EN 13015.
La periodicit‡ della manutenzione preventiva programmata • stabilita dal costruttore,
compreso quella relativa alle verifiche periodiche, comprendenti l’esame a vista e le prove da
eseguire. Per stabilire la periodicit‡, si tiene conto soprattutto dei seguenti elementi:
• traffico e quindi numero di avviamenti orari e annuale, tempi di utilizzo;
• et‡ e stato dell’impianto,
• tipo di edificio e tipo di utenti;
• condizioni dell’ambiente di installazione.
Negli impianti piˆ importanti molto utile risulta un sistema di monitoraggio a distanza, capace
di tenere sotto controllo parametri, guasti e difetti, fornendo i dati relativi.
Per quanto riguarda le verifiche periodiche, queste in pratica sono costituite da alcuni dei
controlli gi‡ previsti inizialmente nella fase di messa in esercizio, soprattutto dei componenti
che funzionano non durante il servizio ordinario ma in caso di necessit‡, come quelli di
sicurezza. In generale una lista dei controlli piˆ importanti da programmare • indicata
nell’appendice A della Norma UNI EN 13015, riferiti soprattutto ai componenti piˆ sollecitati
• piˆ usati. Naturalmente, le operazioni elencate devono comprendere anche la pulizia delle
parti dell’impianto, con una periodicit‡ dipendente anch’essa dalle esigenze dell’impianto.
Manutenzione correttiva
L’ascensore • un sistema tecnologico complesso, che prevede molti dispositivi di sicurezza,
per cui • soggetta a guasti che sono quasi esclusivamente di tipo funzionale.
In questi casi l’impianto si ferma poichŠ in quelle condizioni non garantirebbe piˆ la sicurezza
richiesta dal progetto e dalle norme.
• correntemente valutato che ogni impianto sia soggetto mediamente a tre guasti all’anno, che
ogni ascensore compia circa 50.000 corse all’anno (di cui molte a vuoto). Gli infortuni alle
persone sono pochissimi e quelli mortali solo qualcuno, per cui la probabilit‡ di incidenti •
bassissima.
Una notevole importanza ha la sostituzione di componenti, avendo cura di farlo con ricambi
identici ed evitando rimedi provvisori pericolosi, in relazione ai dati noti sul ciclo di vita
connesso al tasso di guasto. Naturalmente, in dipendenza dell’efficacia della manutenzione
preventiva, ci sar‡ una durata piˆ o meno lunga dei componenti: una manutenzione preventiva
adeguata porta ad una manutenzione correttiva ridotta.
Pagina 38 di 55
DOCUMENTAZIONE TECNICA
La documentazione tecnica serve ad individuare perfettamente l’impianto e consentirne
l’esercizio in condizioni di sicurezza.
In generale, per tutti i prodotti vi • l’obbligo di legge che essi siano accompagnati da una
idonea documentazione.
Il DPR 162/99 e le Norme UNI richiedono che il costruttore debba accompagnare l’impianto
con un manuale di istruzioni, per uso e manutenzione, che deve contenere gli elementi minimi
indicati dalla Norma UNI EN 13015, tra cui:
• una descrizione delle parti costituenti il macchinario;
• le informazioni per l’uso normale e le operazioni di soccorso, da parte sia del proprietario
dell’immobile e sia del manutentore;
• le informazioni per la manutenzione in condizioni di sicurezza;
• i controlli periodici e dopo modifiche importanti o incidenti;
• gli schemi idraulici ed elettrici, con i simboli grafici indicati dalle norme CEI ed UNI.
Una particolare importanza assume lo schema elettrico del quadro di manovra, a blocchi e/o
funzionale, che deve risultare chiaro ed accompagnato dalle istruzioni per le prove e gli
interventi da effettuare in caso di guasti o di emergenza da parte del personale addetto.
La documentazione deve comprendere anche il certificato di conformit‡ CE dell’intera
installazione e copia di certificati CE di esame di tipo dei i componenti di sicurezza, i quali
debbono anche essere dotati di istruzioni per il montaggio, la regolazione e la manutenzione.
L’impianto, inoltre, deve essere accompagnato da un fascicolo tecnico (o libretto), redatto da
chi ha compiuto il controllo finale, contenente i dati dell’ascensore e le caratteristiche dei
componenti, che va aggiornato in caso di modifiche o sostituzione di componenti importanti.
Il fascicolo deve servire anche per la raccolta dei verbali dei controlli con le osservazioni del
manutentore, insieme ai verbali delle verifiche di legge, periodiche e straordinarie, rilasciati
dagli ispettori degli Organismi notificati.
Nel locale macchinario, tra l’altro, occorre che vengano riportati gli avvisi, i pittogrammi e le
istruzioni, importanti ai fini della gestione corretta dell’impianto, come di seguito indicato:
• contrassegnare gli interruttori del quadro principale;
• contrassegnare il quadro di manovra e i componenti montati su di esso, secondo lo schema
elettrico;
• contrassegnare i componenti della centralina idraulica, secondo lo schema idraulico, ed in
particolare la valvola per la discesa di emergenza e la pompa a mano con targhe appropriate;
• sull’argano indicare, oltre al rapporto di riduzione, in prossimit‡ del volantino per la
manovra a mano il senso di marcia della cabina;
• sull’argano, sulle funi e sul telaio di sostegno della macchina, riportare i segni
corrispondenti alle fermate della cabina ai piani;
• sulla centralina idraulica riportare le caratteristiche del fluido impiegato;
• contrassegnare il motore elettrico.
Pagina 39 di 55
SCHEMA FUNZIONALE
Uno schema ha lo scopo di rappresentare graficamente il funzionamento del circuito di
manovra di un ascensore.
Lo schema è quindi una rappresentazione basata sui simboli grafici dei vari circuiti.
In generale solo una persona molto esperta, leggendo uno schema di un generico circuito, può
capire bene e subito il funzionamento esatto dello stesso.
Nelle pagine seguenti sono riportati:
1) Schema elettrico unifilare del quadro del modellino ascensore in formato A3 e
disponibile in formato pdf
2) La legenda dei simboli elettrici
Pagina 40 di 55
IPSIA BELLINI
Novara
LEGENDA SCHEMA
QM FUNE 3F 1V P. Manuali
REV. 1
SIGLA
DESCRIZIONE
NOTE
M
motore di sollevamento
TRM
trasformatore di manovra e ausiliari
SR
FR
TM
SP
DP
M
SP/1
DP/1
TY
TX
U
K
P0…P2
elettropattino scivolo retrattile
elettromagnete freno argano
contattore principale di marcia
contattore principale "salita"
contattore principale "discesa"
rel€ ausiliario di TM
rel€ ausiliario di SP
rel€ ausiliario di DP
rel€ temporizzato riapertura porte
rel€ temporizzato ritardo manovra
rel€ esclusione manovra esterna
rel€ occupato
rel€ dei piani
azionamento serrature
VHA
LV
TLV
ES - ED
CT
IM
PSm
PDm
ALT
STOP
valvola automatica manovra
contatto sicurezza sul limitatore velocit‚
contatto allungamento fune tenditore vel.
contatto extracorsa salita/discesa
contatto di sicurezza paracadute
interruttore manovra manutenzione (ispezione)
pulsante "salita" manovra ispezione
pulsante "discesa" manovra ispezione
pulsante ALT in cabina
interruttore di sicurezza STOP in fossa/tetto
interruttore amperometrico
quando presente
quando presente
CPC
CPP0…CPP2
BPP0…BPP2
contatto porta cabina
contatti di accostamento porte dei piani
contatti di blocco porte dei piani
preliminare porta chiusa
porta chiusa e bloccata
Pi0…Pi2
Pe0…Pe3
CF/0…CF/2
Ps/0…Ps/2
LO0…LO2
LP0…LP2
pulsanti comando in cabina
pulsanti chiamata ai piani
commutatori di fermata ai piani
contatto presente nelle serrature ai piani
Lampada Led segnalazione occupato ai piani
Lampada Led segnalazione presente ai piani
colore rosso
colore verde
tempo occupato
sicurezze chiuse
sull'arcata
in serie ALT cabina
NOTE:
Depaoli Marco
Classe 5ƒ el/A
Descrizione dello schema elettrico del quadro manovra
Lo schema rappresentato in figura • quello utilizzato per il funzionamento del modellino.
Si pu‚ notare che, iniziando da sinistra vi • il circuito primario del trasformatore dotato di
fusibili. Il trasformatore ha la potenza di 400 VA, ed ha due uscite una alla tensione di 48 volt
per il circuito di manovra e l’altra ha tensione di 12 volt per il motore.
Ci sono due raddrizzatori, uno che alimenta appunto il circuito di manovra e l’altro che
alimenta il circuito per il motore.
Sul ramo in alto del circuito di manovra sono riportati:
- I contatti di accostamento delle porte ai piani;
- I due contatti di extracorsa salita e discesa;
- Il contatto dell’ALT, dell’arcata e delle porte cabina.
Dopo i circuiti di sicurezza sopraelencati sono derivati la bottoniera di cabina e di piano, i
rispettivi rel• e i teleruttori ausiliari.
Lo schema viene rappresentato con l’impianto fermo al 1ƒ piano, con le porte di piano e di
cabina chiuse. Infatti come si pu‚ notare dallo schema i contatti CPP1 (contatto accostamento
porte), e il contatto BPP1 (blocco porte o catenaccio) risultano essere chiusi, mentre i contatti
CPC (porta di piano) e CF1 (contatto di fermata) risultano essere aperti.
E’ possibile notare anche la “catena delle sicurezze” riportata in alto cio• i contatti ES, ED,
CT, CPC, ALT, CPP2, CPP1, CPP0, BPP2, BPP1, BPP0.
Questi contatti vengono posti a monte dei contattori delle bobine che andranno ad alimentare il
motore, infatti per far s‰ che l’impianto possa muoversi tutti i contatti dovranno risultare chiusi.
Ora per spiegare meglio il funzionamento del quadro di manovra, simuleremo la chiamata al
piano terra.
Premendo il pulsante P0 si ecciter‡ il rel• P0 che si auto manterr‡ tramite il proprio contatto (P0);
Cos‰ facendo si eccitano i rel• di direzione tramite il contatto P0 ed il contatto di fermata CF0;
Di conseguenza il contatto del rel• di direzione alimenta la bobina del pattine retrattile il quale fa
chiudere la serratura del piano ed il relativo contatto BPP1 che chiude la catena delle sicurezze
verso TM alimentando il motore in direzione di discesa ed il freno motore FR;
Raggiunto il piano terra si apre il contatto di fermata CF0 che fa diseccitare i rel• di direzione e il
rel• del piano facendo fermare l’impianto e sganciare la serratura, diseccitando il pattine
retrattile.
Pagina 43 di 55
CIRCUITO SEGNALAZIONE LUMINOSE
E ILLUMINAZIONE CABINA
Il circuito delle segnalazioni luminose serve ad alimentare le spie ai vari piani ed in cabina.
Esso • a bassa tensione generalmente fra i 10 e i 24 volt, in questo caso viene utilizzata la
tensione di 12 V in corrente continua.
Tale tensione • fornita da un apposito trasformatore o anche dallo stesso trasformatore di
manovra mediante un opportuno avvolgimento come nel nostro caso.
Solamente alcune segnalazioni sono obbligatorie come ad esempio un segnale luminoso rosso
per indicare quando la cabina non • disponibile o in movimento. Nel modellino • stato messo
un timer in grado di far lampeggiare la stessa spia quando l’impianto • in movimento e la fa
rimanere accesa fissa quando • occupato. Pertanto tale spia si accender‡ sia quando la cabina
• occupata sia quando per un’altra ragione qualsiasi non sia disponibile, ad esempio quando
c’• una porta aperta.
La segnalazione del presente (luce verde) si accende tramite il contatto nella serratura a porta
sbloccata.
I circuiti elettrici per le segnalazioni luminose sono molto semplici, perchŠ le lampade di una
stessa segnalazione sono tutte poste in parallelo fra loro e la loro accensione • provocata da
interruttori opportunamente disposti.
Ad esempio, per la luminosa del “presente” al piano, di colore verde, basta realizzare un
circuito la cui chiusura relativa ad ogni lampada (vale a dire ciascun piano) sia determinata da
un contatto posto nella leva degli invertitori oppure nelle serrature delle porte di accesso al
vano.
• facilmente comprensibile che se ad esempio il contatto • realizzato con la leva
dell’invertitore, il circuito si chiuder‡ non appena la leva avr‡ raggiunto la posizione verticale.
Per quanto riguarda il circuito illuminazione cabina generalmente si ha un impianto che
comprende una luce sempre accesa (luce permanente cabina) ed un’altra la cui accensione •
automatica, all’atto dell’apertura della porta di piano o all’ingresso del passeggero in cabina.
In molti impianti • prevista una luce di emergenza che si accende automaticamente in caso di
mancanza di corrente.
Pagina 44 di 55
I QUADRI A MICROPROCESSORE
Ormai anche gli ascensori si avvalgono dell’elettronica che viene utilizzata essenzialmente
per il quadro di manovra.
Innanzitutto • necessario spiegare cos’• l’elettronica utilizzata nelle schede dei quadri di
manovra e di cosa si occupa. Essa si occupa essenzialmente dei segnali forniti dalle variazioni
nel tempo della tensione e della corrente, perci‚ questi valori risultano essere molto piccoli,
nettamente inferiori per quelli usati in elettrotecnica. I segnali trasmessi, con le loro
variazioni, rappresentano delle informazioni che possono essere trasmesse con
apparecchiature analogiche o digitali.
In elettronica, solitamente, si utilizzano tecniche digitali basati su solo due simboli. Queste
tecniche digitali vengono chiamate binarie, usualmente lo zero e l’uno, oppure il si e il no o il
vero e il falso.
La rappresentazione binaria consente di costruire circuiti o apparecchiature che operano in
modo binario. Ovviamente se una rappresentazione dovesse usare una rappresentazione
maggiore di simboli richiederebbe circuiti piˆ complicati (e costosi).
All’elettronica si aggiunge il ruolo fondamentale anche dell’informatica che • la scienza che
studia le informazioni e i modi per elaborarle. Nel caso in oggetto il software del
microprocessore riceve le informazioni e le elabora per far funzionare l’ascensore e conoscere
le sue condizioni operative tramite i segnali.
Nelle schede elettroniche che costituiscono il quadro di manovra vi sono transistori e circuiti
integrati. Per rendere utilizzabili i segnali elettrici vengono utilizzati degli amplificatori in
grado di produrre una forma d’onda simile come frequenza e lunghezza d’onda ma di
maggiore ampiezza.
Gli amplificatori attuali sono realizzati con i transistori (piccolo contenitore metallico-plastico
dotato di tre elettrodi per il collegamento ad altri dispositivi).
Pagina 45 di 55
Il segnale elettrico che entra in uno dei suoi elettrodi • moltiplicato per un determinato
coefficiente accrescitivo prima di essere riemesso dai due altri elettrodi.
Com’• noto un circuito • costituito da un insieme d’elementi collegati tra loro in modo da
funzionare nella maniera voluta; quelli realizzati con piccoli elementi utilizzano in genere la
tecnica dei circuiti stampati.
Questi ultimi utilizzano come supporto delle schede di materiale isolante sulle quali sono
formate delle piste di un sottile strato di rame, che costituiscono i conduttori di
interconnessione.
La tecnica dei circuiti integrati consente di realizzare le diverse parti di un circuito,
collegando direttamente su un sottile strato di cristallo di silicio varie componenti quali
transistori, resistenze, condensatori.
In particolare i transistori possono essere assemblati in un numero elevato consentendo di
realizzare circuiti integrali o chips capaci di svolgere funzioni complesse con consumi ed
ingombri estremamente ridotti.
Da quanto sopra scaturisce l’esatta definizione di chips (in pratica pezzettino-circuito). Nel
linguaggio elettronico per chip s’intende un circuito integrato realizzato su un unico
pezzettino di silicio.
Si estende poi questo termine per indicare l’intero componente elettronico realizzato dal chip
“inscatolato” in un contenitore di plastica o di ceramica e corredato di piedini (pin) che
costituiscono morsetti per i contatti elettrici.
Da qui nascono i microprocessori che sono costituiti da uno o piˆ chips, cio• da componenti
che contengono migliaia di transistori. In sintesi un microprocessore si pu‚ considerare come
realizzato in tre componenti:
- una unit‡ centrale o di controllo ovvero di elaborazione (cpu);
- da una memoria di lavoro;
- dalle periferiche.
L’unit‡ centrale controlla l’esecuzione di una istruzione ed interagisce con quanto contenuto
nella memoria, per eseguire un comando o controllare una data situazione. In pratica esegue le
istruzioni fornite dalla memoria secondo i segnali ricevuti dalle periferiche e le trasmette ad
altre periferiche. Cio• interagisce con l’ambiente esterno.
La memoria contiene le istruzioni contenute nel software, ci‚ da un apposito programma
inserito nell’hardware che permette di ricevere i segnali delle periferiche di entrata, di
elaborarli e trasmetterli sotto forma di comando alle periferiche di uscita.
Le periferiche hanno vari ruoli ad esempio ricordiamo:
- le unit‡ d’ingresso che trasmettono i dati da elaborare ricevuti dall’esterno all’unit‡ centrale;
- le unit‡ di uscita che ricevono i dati elaborati secondo le istruzioni contenute nel software
delle memorie e le trasmettono all’esterno.
• bene evidenziare che nessun circuito della catena delle sicurezze • presente sulla scheda del
microprocessore di un quadro di manovra di un elevatore.
Il microprocessore, infatti, per mezzo delle periferiche d’ingresso (o unit‡ d’ingresso) i cui
sensori controllano anche il circuito di manovra, riceve i comandi del passeggero che
elaborati dall’Unit‡ centrale (cpu), se il circuito delle sicurezze risulta chiuso, trasmette a
mezzo delle periferiche di uscita (o unit‡ di uscita) il comando del passeggero al motore
dell’ascensore.
Pagina 46 di 55
IL MODELLO DI ASCENSORE
Per la tesina di maturit‡ inerente le materie tecniche ho scelto di costruire un modello di
ascensore elettrico funzionante in scala ridotta.
Ne descriver‚ brevemente le sue caratteristiche e il principio di funzionamento, con
particolare riferimento agli aspetti dell’azionamento elettrico.
Dovendo privilegiare la possibilit‡ di trasportare il modello per la sua presentazione durante
l’esame di Stato, e quindi la sua leggerezza e la semplicit‡ costruttiva, si • data la preferenza a
materiali leggeri a facilmente lavorabili, come il legno, il plexiglass, l’alluminio, il teflon, ecc.
in luogo dei materiali piˆ resistenti normalmente utilizzati nella realizzazione di un normale
impianto, quali profilati e lamierati d’acciaio, vetro stratificato di sicurezza e materiali adatti
alle lavorazioni meccaniche in serie.
Tuttavia sono stati riprodotti fedelmente in modo artigianale, adattandoli alle dimensioni
ridotte del modellino, tutti i principali componenti elettrici e meccanici che intervengono nel
normale funzionamento dell’ascensore e che ne garantiscono l’esercizio in condizioni di
sicurezza.
Nonostante siano riprodotti in miniatura, tutti questi componenti auto costruiti risultano
perfettamente funzionanti secondo il loro principio di funzionamento, che • possibile
verificare simulando sul modello una normale corsa dell’impianto oppure un’anomalia tale
per cui debba intervenire un componente di sicurezza che arresti il movimento dell’impianto e
mantenga ferma la cabina, come ad esempio l’apertura di un dispositivo di blocco di una porta
di piano, oppure un intervento del paracadute sulle guide per eccesso di velocit‡.
E’ cos‰ possibile osservare un modello di ascensore con le seguenti caratteristiche:
ascensore per il trasporto di persone o di persone e cose, di tipo elettrico con trazione a funi,
azionato da un argano di sollevamento posto in alto, sopra il vano di corsa, in uno spazio
chiamato locale del macchinario.
Nel locale del macchinario, luogo deputato alla manutenzione, trovano posto l’argano, il
quadretto con gli interruttori elettrici generali, il quadro di manovra e controllo, il limitatore di
velocit‡, i dispositivi per eseguire la manovra manuale di emergenza e la documentazione
inerente l’impianto.
Pagina 47 di 55
Il vano di corsa, ovvero lo spazio entro cui si muovono la cabina e il contrappeso, ognuno
sulle proprie guide rigide metalliche, è costituito da una struttura autoportante, nel nostro caso
in legno, con pareti di tamponamento trasparenti (lastre in policarbonato).
Pagina 48 di 55
L’impianto serve 3 fermate, sullo stesso lato, agli ipotetici piani terreno, primo e secondo
piano di un edificio.
Ogni fermata • dotata di una porta di piano a un battente ad azionamento manuale, con
serratura di blocco meccanico controllata da contatti elettrici di sicurezza, pulsantiera di piano
con un pulsante per la chiamata dell’ascensore, e due led di segnalazione, di “presente” e di
“occupato”.
Pagina 49 di 55
Lungo il vano corsa sono disposti i contatti di fermata ad ogni piano, i quali saranno azionati
da un apposito scivolo sagomato solidale con la cabina, determinandone il suo arresto e la
predisposizione per il suo futuro movimento nella direzione desiderata.
La cabina, costruita in legno, è dotata di porte scorrevoli a due ante ad azionamento manuale e
di luce interna, ed è normalmente supportata da una struttura metallica portante (chiamata
arcata) che mediante 4 pattini di scorrimento in materiale antifrizione la mantengono guidata
sulle guide verticali.
Pagina 50 di 55
Sul tetto della cabina • stato riprodotto un elettromagnete funzionante, che tramite uno scivolo
retrattile opportunamente dimensionato, aziona le leve di sblocco delle serrature ai piani,
quando la cabina si trova ferma davanti a una porta, nella zona limitata in cui • consentita
l’apertura della porta.
Tornando nel locale del macchinario, l’argano di sollevamento • stato riprodotto adattando il
motoriduttore di un tergicristallo alimentato a 12 Vc.c. tramite un proprio trasformatore e
raddrizzatore, sul cui albero lento del riduttore • stata calettata una puleggia di dimensioni
idonee alla distanza della calata delle funi, da un lato sulla cabina e dall’altro sul contrappeso.
Sul riduttore • stato poi applicato il gruppo elettromagnete del freno, con due ceppi agenti sul
giunto del volano.
Tra i particolari perfettamente funzionanti nella loro fedele riproduzione sono da segnalare il
limitatore di velocit‡, che intervenendo in caso di eccesso di velocit‡ in discesa o per rottura
delle funi di sospensione, attraverso la sua funicella ausiliaria mantenuta in tensione da un
apposito tenditore, ingaggia le leve del dispositivo paracadute montato sulla cabina, i cui due
blocchi del tipo a rulli a presa istantanea (anch’essi funzionanti in miniatura) provocano il
bloccaggio della cabina sulle guide.
L’intervento del paracadute comanda l’apertura un interruttore di sicurezza che inibisce il
funzionamento elettrico dell’ascensore fino all’intervento di una persona competente e al
ripristino delle condizioni di sicurezza.
Per ragioni di spazio e comodit‡ di esecuzione delle prove, il quadro di manovra, la
pulsantiera con i comandi di cabina e la pulsantiera di manutenzione sono stati posizionati su
un lato esterno della struttura.
Pagina 51 di 55
Il quadro di manovra e lo schema elettrico.
Si • scelto di realizzare uno schema di tipo elettromeccanico in quanto meglio si presta per
l’analisi del suo funzionamento a scopo didattico, potendo visualizzare in modo intuitivo lo
stato dei contatti elettrici e il percorso della corrente elettrica.
Inoltre, va detto che anche nei quadri di controllo di moderna concezione, dove le funzioni di
registrazione dei comandi, di controllo e segnalazione della posizione della cabina, ecc. sono
affidate a un microprocessore, le funzioni di sicurezza sono sempre affidate a componenti
esterni quali contattori e contatti di sicurezza ad apertura positiva (a ponte asportato, a
distacco obbligato o apertura forzata), e l’interruzione della corrente che alimenta i motori •
governata da contattori elettromeccanici di potenza adeguati alla gravosit‡ del servizio, anche
se pilotati da un segnale in uscita da un PLC.
Va inoltre ricordato che i contattori del motore principale devono sempre essere comandati
direttamente, o per mezzo di contatti di sicurezza, dai dispositivi di sicurezza che ne
Pagina 52 di 55
consentono il movimento (serrature, ecc.).
Per ragioni di sicurezza e consentire di alimentare il modello dimostrativo attraverso una
normale presa di energia di tipo domestico, l’intero circuito di manovra funziona a bassa
tensione di sicurezza, attraverso un trasformatore di isolamento con il primario alimentato
dalla rete elettrica monofase a 230V 50 Hz e due uscite secondarie, una a 48 V per i circuiti di
comando, e una a 12 V per i circuiti di alimentazione del motore e di segnalazione, anche se
nella pratica questi impianti (tranne per gli ascensori domestici e le piattaforme elevatrici)
sono alimentati da un sistema elettrico trifase a 400V 50 Hz per la parte di azionamento, e
sempre con un valore di tensione ridotto con trasformatore di isolamento per i circuiti di
comando e di segnalazione.
Lo schema elettrico • rappresentato in assenza di alimentazione, con i contatti disegnati in
posizione di riposo, cabina ferma alla fermata intermedia con le porte di cabina in posizione
di chiusura, le porte dei piani chiuse e bloccate, tranne quella di fronte alla quale si trova la
cabina, ovvero la porta del piano 1 (intermedio) che • chiusa (contatto di accostamento CPP1
chiuso in B-3) ma non bloccata (contatto di blocco BPP1 aperto in C-4).
Si pu‚ notare il contatto di fermata CF1 (C-5) mantenuto aperto dalla presenza della cabina al
piano, il contatto di segnalazione della posizione al piano P1 (D-8) chiuso, che indica la
presenza al piano 1 e il contatto di sicurezza del catenaccio di blocco della serratura al piano 1
mantenuto aperto dallo scivolo retrattile a riposo, trovandosi la cabina di fronte alla porta
stessa.
Immaginando di alimentare il quadro di manovra, otterremo l’accensione della segnalazione
verde di presente al piano 1, accesa dal contatto della serratura corrispondente (D-8), e quella
di occupato spenta a tutti piani, in quanto il contatto del rel• K in C-7 • aperto, essendo il rel•
normalmente eccitato in condizioni normali (cabina ferma al piano, libera, in attesa di
comandi).
I contatti di sicurezza (extracorsa in salita e discesa ES-ED, contatto del paracadute CT e
porta cabina CPC, pulsanti di arresto ALT, contatti di accostamento delle porte dei piani e di
controllo del blocco delle porte BPP sono tutti collegati in SERIE sul polo positivo del
circuito di manovra, tra i morsetti 20, 21, 22, 23, 28 e 24 in quella che viene definita”catena
delle sicurezze”in modo che l’interruzione anche di uno solo di questi contatti determini la
diseccitazione dei rel• e/o contattori di comando, interrompendo il movimento del
macchinario.
Il polo negativo del raddrizzatore di manovra • invece collegato a terra, con funzione di
protezione contro i guasti verso terra, come vedremo piˆ avanti.
Premendo ad esempio il pulsante di chiamata al piano terra (Pe0) essendo l’impianto fermo
con le sicurezze e le porte chiuse, ed essendo chiuso il contatto del rel• TY, abbiamo tensione
fino al morsetto 40 (comune delle chiamate esterne) quindi si eccita il rel• di piano P0, il
quale si auto mantiene attraverso il suo contatto in D-6.
Il contatto di P0 in B-5 si chiude e in base alla posizione dei commutatori di piano visibile
sullo schema elettrico, la corrente pu‚ circolare dal morsetto C0 attraverso i contatti di CF0
verso la bobina del contattore DP, il quale eccitandosi predispone la marcia in discesa e
contemporaneamente, tramite la chiusura dei suoi contatti in B-2, comanda l’elettromagnete
SR sul tetto di cabina che attirando lo scivolo retrattile provoca il bloccaggio meccanico della
porta di piano.
Pagina 53 di 55
A questo punto chiudendosi anche la serie dei contatti delle serrature ditutte le porte dei piani,
la corrente circoler‡ anche dal morsetto 28 al 24 e trovando gi‡ chiuso il contatto di DP, si
eccita il contattore TM, i cui contatti in C-1 e C-2 aprono il freno FR e alimentano il motore
dell’argano.
Attraverso i contatti ausiliari del rel• M si accende il segnale di occupato ai piani e l’impianto
inizia la sua marcia in discesa verso il piano 0 (terreno).
Quando la cabina arriva in prossimit‡ del piano richiesto (il piano 0) lasagoma fissata alla
cabina stessa aziona il contatto di fermata CF0, interrompendo l’’alimentazione alla bobina
del rel• di marcia DP e DP/1 i quali, interrompendo la corrente che alimenta il motore e il
freno, ne provocano l’arresto, diseccitando anche il rel• di piano P0, finora mantenuto dal
contatto di DP in B-4.
Quando la cabina ha abbandonato il piano P1 per scendere al piano 0, il contatto di fermata
CF1 • tornato nella sua posizione di riposo in chiusura, predisponendo l’impianto per le
successive chiamate in salita.
La stessa sequenza • riproducibile per ogni altra chiamata ai piani, nelle due direzioni di
marcia.
I due temporizzatori TX e TY sono stati realizzati facendo in modo che la carica accumulata
nei condensatori elettrolitici polarizzati posti in parallelo alle loro bobine durante il normale
funzionamento dell’impianto, quando disalimentati provochino un ritardo alla diseccitazione
proporzionale alla loro capacit‡ e quindi alla quantit‡ di cariche elettriche accumulate che,
obbligate dal diodo di blocco in B-2, si scaricano ai capi delle rispettive bobine, mantenendo
la tensione ai loro capi per il tempo desiderato (alcuni secondi).
In particolare il temporizzatore TX, con il suo contatto in C-4, garantisce che dopo il termine
di una corsa, ci sia il tempo di uscire dalla cabina e richiudere le porte,prima che un’altra
persona possa chiamare l’ascensore da un altro piano.
Questo • reso possibile dal contatto di TX in C-5,che taglia il comune delle chiamate esterne
(morsetto 40) fino allo scadere del tempo di ritardo, equivalente al tempo di “occupato”.
Come si pu‚ vedere questo ritardo non ha effetto sul comune dei comandi interni della cabina
(morsetto 50), in quanto le persone all’interno della cabina hanno la priorit‡ di selezionare il
piano desiderato.
Prendiamo in esame alcune regole fondamentali.
1) L’apertura anche di un solo contatto nella serie della catena delle sicurezze provoca
l’interruzione del movimento.
2) Per ogni senso di marcia devono sempre concorrere almeno due rel• o contattori
principali per alimentare il motore di sollevamento e comandare l’apertura del freno.
La ridondanza dei contatti dei contattori di marcia garantisce che anche la mancata
apertura di uno dei due (o l’incollaggio dei loro contatti dovuto ad arco elettrico, o
dell’equipaggio mobile per magnetismo residuo) provochi l’arresto del macchinario.
3) Allo stesso modo i contatti di extracorsa nei due sensi di marcia, in caso di
scivolamento del freno o mancata apertura di un contatto di fermata, agiscono sulle
bobine di entrambi i contattori principali di marcia, per garantire l’arresto del motore
prima che la cabina raggiunga gli arresti fissi o gli ammortizzatori nella fossa in
discesa o sotto il contrappeso in salita.
Pagina 54 di 55
4) L’interblocco meccanico tra due contattori che eseguono l’inversione delle fasi a
seconda del senso di marcia, evita il cortocircuito tra le fasi, cos‰ come l’interblocco
elettrico (realizzato ponendo in serie alla bobina del contattore di ogni senso di marcia
un contatto normalmente chiuso dell’altro) impedisce il secondo guasto dopo la
mancata apertura di un contattore, al piˆ tardi alla prima inversione del senso di
marcia.
5) Prevenzione del mancato arresto e/o dell’avviamento indesiderato del macchinario.
Questa condizione, fondamentale per la sicurezza del macchinario, si realizza partendo
dai seguenti presupposti:
- Aver collegato al morsetto di terra conduttori di protezione di tutte le masse e dei
contenitori metallici di componenti elettrici (es. le serrature);
- Il circuito di manovra sia alimentato attraverso un trasformatore di isolamento e
raddrizzatore con un polo a terra (il comune delle bobine dei contattori) e interruttore
automatico sul ramo opposto;
- Tutti i contatti di sicurezza siano posti in serie sul polo non collegato a terra.
In questo modo viene scongiurato il pericolo che in seguito a due guasti a terra consecutivi
direttamente a monte e a valle di uno o piˆ contatti di sicurezza (per cedimento del
materiale isolante o per danneggiamento meccanico) i contatti di sicurezza possano essere
bypassati da una circolazione di corrente dal polo positivo al negativo attraverso la
dispersione nelle masse metalliche, mantenendo eccitate le bobine dei rel• e consentendo
una situazione di grave pericolo come il mancato arresto del macchinario o il suo
avviamento intempestivo, ad esempio con una porta di piano aperta!
Osservando lo schema elettrico infatti, se ipotizziamo un primo guasto a terra, ad esempio
sul morsetto 28, la corrente di guasto si richiuder‡ attraverso il conduttore di protezione
delle masse collegate a terra, sul polo negativo (a sua colta collegato a terra nel punto “0”
in E-1).
Questo equivale ad un corto-circuito franco tra i due poli positivo e negativo del
raddrizzatore, e quindi provoca l’intervento dell’interruttore magnetico VHA posto sul
polo positivo all’inizio del circuito di manovra, a monte della catena delle sicurezze,
scongiurando il pericolo di un movimento non previsto.
Questo interruttore di protezione (comunemente chiamato anche “valvola automatica”,
perchŠ inizialmente era un semplice fusibile, o interruttore amperometrico) • di norma
scelto con una corrente nominale di 2 – 4 A con curva di intervento rapida (tipo B o K).
Tutte le masse dell’impianto devono essere collegate tra di loro e al morsetto di terra
principale, che deve essere in collegamento equipotenziale con l’impianto di terra
dell’edificio.
Per facilitare la visualizzazione dello stato dell’impianto e una piˆ agevole gestione e ricerca
di eventuali guasti, sono stati inseriti alcuni Led indicatori, con le funzioni riportate nella
legenda dello schema elettrico.
Pagina 55 di 55