Operazioni sulle immagini
Multimedia
Semplificazione: toni di grigio
Per semplificare la trattazione del problema
lavoreremo solo su immagini a toni di grigio.
Le medesime operazioni descritte per tali
immagini si estendono alle immagini RGB
operando separatamente sui tre canali (piani)
R, G e B e trattando ciascuno di essi come
una immagine a toni di grigio indipendente
dagli altri canali (soluzione non sempre
apprezzata in ambito della ricerca).
Multimedia
L’istogramma
I pixel di una immagine sono una
“popolazione” sulla quale possiamo calcolare
tutte le quantità statistiche descrittive che si
usano normalmente: Media, mediana,
varianza, deviazione standard, quartili,
percentili ...
Particolarmente importante è la conoscenza
della distribuzione delle frequenze dei toni di
grigio: l’istogramma.
Multimedia
Istogramma
Per ogni livello di grigio, riporta il numero di
pixel di quel colore.
Per una immagine I[m,n] si ha
H(k)= numero di pixel di valore k
E la somma di tutti gli H è esattamente mxn
L’istogramma è utile a comprendere in
maniera immediata le caratteristiche
dell’immagine.
Multimedia
Istogramma
Multimedia
5
Immagini diverse potrebbero avere
istogrammi simili!
L’istogramma non tiene conto della distribuzione spaziale
Multimedia
6
dei pixel!
Immagine chiara:
istogramma più denso a destra
Multimedia
7
Immagine scura:
istogramma più denso a sinistra
Multimedia
8
Immagine sottoesposta
Multimedia
9
Immagine sovraesposta
Multimedia
10
Operazioni sulle immagini
Multimedia
11
Operazioni sulle immagini
Sono operazioni alterano i valori dei pixel di
una immagine.
L’immagine finale apparirà differente da quella
iniziale.
Questi operatori lavorano sia su immagini a
colori che su immagini a toni di grigio.
Multimedia
12
Operazione su una immagine
Le elaborazioni nel dominio spaziale possono
essere espresse come:
g ( x, y ) = T [ f ( x, y )]
essendo f l’immagine di ingresso alla
elaborazione, g quella di uscita e T un
operatore su f definito in un intorno di (x,y).
Multimedia
13
Tipi di operazioni
La dimensione dell’intorno di (x,y) definisce il
carattere della elaborazione:
puntuale (l’intorno coincide con il pixel
stesso);
locale (per esempio una piccola regione
quadrata centrata sul pixel);
globale (l’intorno coincide con l’intera f).
Multimedia
14
Operatori puntuali
Multimedia
15
Operatori puntuali
Si dice operatore puntuale, un operatore che
preso in input il valore di un pixel ne
restituisce uno cambiato che dipende
esclusivamente dal valore del pixel in
ingresso.
Multimedia
16
Tipiche operazioni puntuali:
aggiunta o sottrazione di una costante a tutti
i pixel (per compensare sotto o
sovraesposizioni);
inversione della scala dei grigi (negativo);
espansione del contrasto;
modifica (equalizzazione o specifica)
dell'istogramma;
presentazione in falsi colori.
Multimedia
17
Operatori puntuali
Un operatore puntuale può essere rappresentato da una
funzione che preso in input un valore x lo modifica in un
valore y=f(x) con x,y appartenenti allo stesso campo di
definizione (es. entrambi tra 0 e 255).
Poiché un operatore puntuale dipende solo dal valore
del pixel esso è completamente descritto da una tabella
come quella che segue:
IN
0
1
2
3
4
5
6
7
…
OUT
f(0)
f(1)
f(2)
f(3)
f(4)
f(5)
f(6)
f(7)
…
Multimedia
18
OUT
f(x)
Questa è
universalmente
l’interfaccia che
tutti i programmi
commerciali di
immagini offrono
per la
visualizzazione e
gestione delle
operazioni puntuali
…
8
7
X X X
6
X
5
X
4
X
3
X X
2 X
1
0
0 1 2 3 4 5 6 7 8 …
Multimedia
x
IN
LUT
Questo tipo di grafico si chiama look-up
tables (LUT).
Multimedia
20
In Photoshop: “aggiusta curve”
Multimedia
21
Negativo
E’ la più semplice operazione puntuale.
Consiste nell’associare al valore x del pixel il
valore 255-x
Multimedia
22
Negativo
Come cambia la curva?
Multimedia
23
Negativo
Cosa cambia nell’istogramma?
Multimedia
24
Esempio
(a) Mammografia digitale (b) Negativo dell’immagine
ottenuta usando la trasformazione “negativo”
Multimedia
Incupimento dell’immagine
Come devo modificare la mia curva?
Multimedia
26
Incupimento dell’immagine
Cosa è cambiato nell’istogramma?
Multimedia
27
Schiarimento dell’immagine
Come devo modificare la curva?
Multimedia
28
Schiarimento dell’immagine
Come è cambiato l’istogramma?
Multimedia
29
Trasformazione logaritmica
Si tratta di una trasformazione che consente di
comprimere la gamma dinamica, permettendo la
memorizzazione o la visualizzazione, con una scala
dei grigi usuale, di immagini caratterizzate da
escursioni di intensità molto ampie. Può essere
espressa come:
s = c log(1 + r )
Dove c è una costante positiva che serve a
normalizzare il risultato tra 0 e 255.
Multimedia
30
Multimedia
31
Trasformazione logaritmica
Multimedia
32
Trasformazione di potenza
La trasformazione di potenza può essere espressa
come:
s = cr
γ
dove c e γ sono costanti positive. La costante c è
scelta di volta in volta in modo da normalizzare i
valori di s nell’intervallo [0, 255]. Come vedremo, per
valori di γ minori di 1 la trasformazione ha effetti
analoghi alla trasformazione logaritmica
(espansione della dinamica per bassi valori di r,
compressione della dinamica per alti valori di r),
mentre per valori di γ maggiori di 1 la trasformazione
ha esattamente gli effetti opposti.
Multimedia
33
LUT al variare di gamma
Multimedia
34
Multimedia
35
Esempi
Originale
Gamma=3
Multimedia
Gamma=10
36
Gamma=17
Multimedia
37
Multimedia
38
Applicazione di gamma alla resa dei
monitor
Su un monitor CRT (con γ= 2.5) si può
applicare una correzione pre-processando
l’input con la corrispondente funzione
inversa: s = r1/2.5= r0.4
Multimedia
39
Multimedia
40
Binarizzazione
Produce una immagine che ha solo due livelli: nero e
bianco.
Si ottiene scegliendo una soglia T e mettendo a nero tutti
i pixel il cui valore è minore a T e a bianco tutti gli altri.
Multimedia
41
Binarizzazione
Come si agisce sulla curva?
Multimedia
42
Binarizzazione
Come cambia l’istogramma?
Multimedia
43
Variazioni di contrasto
Aumentare il contrasto, significa rendere più
evidenti le differenze di colore.
Ciò si ottiene andando a cambiare il valore di
un pixel con un altro che sia più scuro o più
chiaro.
Multimedia
44
Aumento del contrasto
Multimedia
45
Aumento del contrasto
Come si deve cambiare la curva?
Multimedia
46
Multimedia
47
Aumento del contrasto
Cosa cambia nell’istogramma?
Multimedia
48
Contrast Enhancement
Multimedia
Altro esempio
Multimedia
50
Diminuizione di contrasto
Multimedia
52
Diminuizione del contrasto
Come cambio la curva?
Multimedia
53
Diminuizione del contrasto
Come cambia l’istogramma?
Multimedia
54
Curve non monotone
È possibile fare delle variazioni alle curve in
modo che questa diventi non monotona.
Un esempio è la “solarizzazione”
Multimedia
55
Curve non monotone
Ecco come si deve cambiare la curva:
Multimedia
56
Curve non monotone
Ecco come è cambiato l’istogramma:
Multimedia
57
Espansione del contrasto (contrast
stretching)
Serve per aumentare la dinamica di
un’immagine il cui istogramma è concentrato
su un intervallo limitato dei valori possibili.
Si ottiene spostando (con appositi algoritmi) i
valori di un bin dell’istogramma verso un altro
bin non utilizzato.
L’istogramma apparirà in maniera differente,
tipo pettine. Ciò è fatto per mettere in risalto
che i bin mancanti sono stati distribuiti lungo
altri livelli.
Multimedia
58
Contrast stretching
Immagine originale
Immagine “corretta”
Toni
non usati
Multimedia
Aritmetica sulle immagini
Operando aritmeticamente può accadere che un
pixel abbia:
a) Un valore negativo;
b) Un valore maggiore del massimo (tipicamente
255);
c) Un valore non intero (facilmente risolubile con
una approssimazione o un troncamento);
Multimedia
60
Normalizzazione
I problemi a) e b) della precedente slide si chiamano problemi di range.
Due le soluzioni più comuni:
•
Settare a 0 (nero) i valori negativi e a 255 (bianco) i valori maggiori
di 255.
•
Ri-normalizzare il range trasformando ciascun valore secondo la
equazione:
vnuovo= 255 *
(vvecchio – minosservato)
(maxosservato – minosservato)
Multimedia
61
Equalizzazione
Si parla di immagine equalizzata quando il contributo
di ogni differente tonalità di grigio è pressappoco
eguale.
Si parla anche di “istogramma” uniforme o appiattito.
L’equalizzazione si ottiene usando appositi algoritmi
Attenzione non sempre la equalizzazione migliora l’immagine!
Multimedia
62
Immagine equalizzata
Multimedia
Immagine equalizzata
Multimedia
64
Multimedia
65
Algoritmo di Equalizzazione
Se rk è un livello di grigio e nk il numero di
pixel nell’immagine MxN di quel livello di
grigio, si può definire
Se facciamo il plot di rk versus pr(rk) quello
che si ottiene è l’istogramma dell’immagine.
Multimedia
66
Algoritmo di Equalizzazione
I nuovi valori di grigio dell’istogramma sono
così definiti:
Multimedia
67
Algoritmo di Equalizzazione:
Esempio
Sia data una immagine a 3 bit (L=8) con
64x64 pixel (MN=4096) con la seguente
distribuzione di intensità:
Multimedia
68
Algoritmo di Equalizzazione:
Esempio
Applicando la formula si ha:
Arrotondando:
Multimedia
69
Algoritmo di Equalizzazione:
Esempio
Multimedia
70
Algoritmo di Equalizzazione:
Esempio
Multimedia
71
Equalizzazione: un esempio
Multimedia
Equalizzazione dell’Istogramma
Come si può notare, l’istogramma della immagine equalizzata non è
piatto. D’altro canto, l’uniformità della ps(s) è stata verificata solo nel
caso continuo, e non nel caso discreto.
Tuttavia, i livelli di grigio dell’immagine equalizzata spaziano su tutta
la dinamica possibile (anche se alcuni livelli possono non essere
presenti), ed in particolare raggiungono sempre il bianco.
Al conseguente incremento del contrasto si possono aggiungere
effetti sgradevoli quali lo “sgranamento” dell’immagine, la comparsa
di “false” regioni, ecc., soprattutto quando il contrasto dell’immagine
originale è molto basso.
L’apparenza dell’immagine può essere migliorata anche con altre
tecniche di modifica del contrasto, ma l’equalizzazione
dell’istogramma ha il vantaggio di essere completamente
automatica.
Multimedia
Bit-plane
Un’immagine
con
una
profondità colore di N bit
può essere rappresentata
da N piani di bit (bit-planes),
ciascuno dei quali può
essere vista come una
singola immagine binaria. In
particolare si può indurre un
ordine che varia dal Most
Significant Bit (MSB) fino
al Least Significant Bit
(LSB).
Multimedia
91
Bit-plane
Multimedia
92
Bit-planes
Most Significant bit (MSB)
Least Significant bit (LSB)
Multimedia
93
Bit-planes
Multimedia
94
Bit-planes: Osservazioni
I piani di bit più significativi contengono
informazioni sulla struttura dell’immagine,
mentre quelli via via meno significativi
forniscono i dettagli sempre più piccoli.
Si noti che solo i piani dal 7 al 3 contengono
dati significativi dal punto di vista visuale.
Il rumore delle immagini e gli errori di
acquisizione sono più evidenti nei piani bassi.
Multimedia
95
Bit-planes
Multimedia
96
Bit-plane
Multimedia
97
Esempio:
Questo genere di scomposizione è molto utile
per eliminare tutti i valori compresi in un certo
range.
Ad esempio, se si vogliono eliminare tutti i
grigi compresi tra 32 e 64, è necessario porre
a 0 il quinto bit, e quindi tutto il piano 5.
Multimedia
98
Bit-plane
Multimedia
99
Multimedia
100
Operatori locali
Multimedia
101
Operazioni locali
Il valore d’uscita di ogni pixel dipende da un
limitato intorno del corrispondente punto in
input.
Sono usati per migliorare la qualità delle
immagini o per estrarre delle informazioni
dall’immagine.
Si possono pensare come filtraggi
dell’immagine.
Un filtraggio è ottenuto facendo la
convoluzione tra l’immagine ed una matrice.
Multimedia
102
Operatori Lineari
Un operatore
F:V
W
si dice LINEARE se per ogni coppia di vettori v1 e v2
in V e per ogni coppia di scalari a,b si ha che:
F(a v1 + b v2) = a F(v1) + b F(v2)
Conseguenza: se conosco una base di V ed il
comportamento dell’operatore F su ogni elemento di
tale base, posso calcolare il comportamento di F su
ogni elemento di V.
Multimedia
103
Esempi
Sia F l’operatore da R3 a R3 che trasforma ogni vettore (x,y,z) in (x/2,
y/3, z/4).
Esso è lineare ed è completamente descritto una volta che si descrive il
suo comportamento su ogni elemento della base canonica:
F((1,0,0)) = (1/2, 0, 0);
F((0,1,0)) = (0, 1/3, 0);
F((0,0,1)) = (0, 0, 1/4).
L’operatore puntuale “negativo” NON E’ LINEARE
perché
F((x,y,z)) = (255-x, 255-y, 255-z);
È diverso da
x*F((1,0,0))+y* F((0,1,0)) z* F((0,0,1))
= x*(255-1, 0, 0)+y* (0, 255-1, 0)+z*(0, 0, 255-1)
= x*(255-1)+y* (255-1)+z*(255-1)
Multimedia
104
NON invariante per traslazione
L’esempio nella slide precedente ha un comportamento che non è lo
stesso su tutti gli elementi della base canonica di RN.
Infatti: il comportamento varia da elemento ad elemento a seconda della
posizione all’interno della immagine.
Questo è un operatore NON invariante per traslazioni!
Per descrivere questi operatori, dobbiamo conoscere il suo
comportamento su ciascun “impulso” in ciascuna locazione delle
immagini!
Attenzione: questi operatori non sono “cattivi” ma solo “difficili” da
studiare…
Multimedia
105
Operatori invarianti per traslazione
Un operatore si dice invariante per
traslazione (shift invariant) quando il suo
comportamento sulle immagini impulsive è
sempre il medesimo indipendentemente dalla
posizione in cui si trova il pixel.
Tutti gli operatori puntuali sono invarianti per
traslazione (anche se non sono lineari).
Multimedia
106
Riassumendo:
Se F è lineare per descriverlo basta conoscere il
comportamento su tutte le immagini impulsive
Se F è shift invariant si comporta allo stesso modo su
tutti gli impulsi, indipendentemente dalla loro posizione
Se F è sia lineare che shift invariant per descriverlo
basta conoscere come si comporta su un solo impulso.
La “risposta all’impulso” o “point spread function” di F
è la carta di indentità di tale operatore.
Multimedia
107
Ad un operatore lineare e shift invariante corrisponde una
maschera ma vale anche il viceversa: ad una maschera
corrisponde un simile operatore
ESEMPIO
Si consideri l’operazione che preso un impulso:
00000
00100
00000
lo trasforma in:
0 0 0 0 0
0 .5 0 .5 0
0 0 0 0 0
Tale “risposta all’impulso” o PSF definisce completamente un operatore
lineare e invariante per traslazioni F. Spesso un operatore su una
immagine prende il nome di “filtro”.
La matrice che descrive la risposta all’impulso si chiama anche kernel o
maschera dell’operatore.
Essa è detta anche maschera di convoluzione di F per ragioni che vedremo
tra breve.
Multimedia
108
prima
dopo
Multimedia
109
Kernel finiti o infiniti e complessità
La grandezza del kernel può variare fino ad essere
infinita
Per ragioni pratiche, però, si usano solo kernel con
dimensioni finite.
Le dimensioni del kernel influenzano la complessità
della operazione di filtraggio.
Tale complessità dipende ovviamente anche dal
numero dei pixel di una immagine.
Multimedia
110
Perché filtri “convolutivi”?
I filtri lineari e invarianti per traslazione vengono
chiamati anche filtri convolutivi.
Dobbiamo studiare la operazione di
convoluzione per capire meglio come un
filtro può essere calcolato.
Inoltre la convoluzione è un fenomeno
estremamente importante per ogni tipo di
signal processing e per la descrizione di
numerosi eventi fisici.
Multimedia
111
Convoluzione: proprietà
Per indicare l’operazione di convoluzione si
usa la notazione
h=f g
La convoluzione è commutativa
f
g=g
f
La convoluzione è associativa
(f g) h = f (g h)
Multimedia
112
g
f
Multimedia
113
Nel caso finito (1)
Se il kernel f ha dimensioni kxh la formula va riscritta nella
seguente maniera
-1
hm ,n =
k 2 −1 h / 2 −1
∑ ∑(f
i = − k / 2 j = − h / 2
i, j
* g m +i ,n + j )
0
1
-1 a
0 d
1
b c
e f
g h i
Se gli indici del kernel sono disposti in modo da avere il punto
di coordinate (0,0) nella posizione centrale.
Multimedia
114
Nel caso finito (2)
Se il kernel f ha dimensioni kxh la formula va riscritta nella seguente
maniera
1
hm ,n =
k ,h
∑f
i =1, j =1
i, j
* g m + ( i − k + k / 2 ),n + ( j − h + h / 2 )
3
1 a
2 d
3
2
b c
e f
g h i
Se gli indici del kernel sono disposti partendo da 1 fino ad arrivare ad h
o k.
Multimedia
115
Esempio
-1
0
1
1
2
2 1
2
1
2
-1 2
0 1
1
1
1
2
3
4
1 1
2 3
2
2
2
3 1
1 4
7 1
1
2
2
2
2
5
9
5 3
0
1
1
2
1 2
4 1
4
3
4
5
2
3
30
3
5
Multimedia
116
4
5
Esempio
-1
0
1
1
2
2 1
2
1
2
-1 2
0 1
1
1
1
2
3
4
1 1
2 3
2
2
2
3 1
1 4
7 1
1
2
2
2
2
5
9
5 3
0
1
1
2
1 2
4 1
4
3
4
5
2
3
30 45 30
3
5
Multimedia
4
117
5
Esempio
-1
0
1
1
2
2 1
2
1
2
-1 2
0 1
1
1
1
2
3
4
1 1
2 3
2
2
2
3 1
1 4
7 1
1
2
2
2
2
5
9
5 3
0
1
1
2
1 2
4 1
4
3
4
5
3
2
3
30 45 30
46 27 37
5
Multimedia
4
118
5
Esempio
-1
0
1
1
2
2 1
2
1
2
-1 2
0 1
1
1
1
2
3
4
1 1
2 3
2
2
2
3 1
1 4
7 1
1
2
2
2
2
5
9
5 3
0
1
1
2
1 2
4 1
4
3
4
5
3
2
3
30 45 30
46 27 37
34 41 28
5
Multimedia
4
119
5
Convoluzione e filtraggio
Applicare un filtro lineare e shift invariante ad
una immagine è equivalente a calcolare la
convoluzione del kernel del filtro con
l’immagine.
Multimedia
120
Nell’implementazione
Un problema è quello dei bordi: come fare la convoluzione e il
filtraggio ai bordi?
POSSIBILI SOLUZIONI:
a)
Filtrare solo le zone centrali dell’immagine
b)
Supporre che tutto intorno all’immagine ci sia 0
c)
Assumere una topologia “toroidale”: quando si “sfora a destra”
si rientra a sinistra, quando si “sfora” in basso di rientra in alto
e viceversa;
d)
Aggiungere una riga all’inizio uguale alle riga precedente, una
riga alla fine uguale all’ultima riga, una colonna all’inizio uguale
alla colonna iniziale, e una colonna alla fine uguale alla
colonna finale.
Multimedia
121
a) Filtrare solo le zone centrali
dell’immagine
Le aree in grigio non
verranno calcolate
output
input
1
3
2
2
2
5
2
2
2
3 1
1 4
7 1
9
3
0
1
1
2
1 2
4 1
30 45 30
46 27 37
34 41 28
Multimedia
122
b) Supporre che tutto intorno
all’immagine di input ci sia lo “0”
input
0
0
0
0
0
1
3
2
0
2
2
5
0
2
2
2
0
3
1
7
0
1
4
1
0
0
0
0
0 9
0 3
0
1
1
2
1 2
4 1
0
0
0 0
0
0
0
0
0
Multimedia
output
11
25
25
35
16
19
30
46
34
27
17
45
27
41
12
123
22
30
37
28
18
11
31
19
29
10
c) Riempire le righe e le colonne
aggiunte in maniera “toroidale”
input
1
1
4
1
3
1
3
2
1
2
2
5
2
2
2
2
4
3
1
7
1
1
4
1
3
1
3
2
2 9
1 3
0
1
1
2
1 2
4 1
9
3
1 1
2
2
3
1
1
Multimedia
output
27
33
38
41
28
30
30
46
34
35
29
45
27
41
24
124
32
30
37
28
27
33
40
45
48
40
d) Riempire le righe e le colonne
aggiunte con i valori più vicini
input
1
1
3
2
1
1
3
2
2
2
2
5
2
2
2
2
3
3
1
7
1
1
4
1
1
1
4
1
9 9
3 3
0
1
1
2
1 2
4 1
2
1
3 3
1
2
4
1
1
Multimedia
output
25
34
51
54
48
27
30
46
34
32
29
45
27
41
24
125
31
30
37
28
34
33
39
32
35
26
Estrazione di contorni
Multimedia
126
Caratteristiche di immagini
In Visione Computazionale il termine feature di
immagini si può riferire a due entità possibili:
Una proprietà globale di un’immagine o una regione
(es. il livello di grigio medio, la distribuzione di colore,
...);
Una parte dell’immagine con alcune proprietà speciali
(es. una linea, un’ellisse,...)
Le caratteristiche o proprietà di cui devono godere
tali features, per poter essere utilizzate in maniera
robusta dipendono dal contesto applicativo
Multimedia
Feature
Tipicamente
le feature hanno una dimensione molto
ridotta rispetto ai dati di origine (ad esempio da
un’immagine di alcuni MB si potrebbero voler estrarre
solo poche decine di valori). Sono generalmente (ma non
necessariamente) costituite da una serie di dati numerici,
rappresentabile come un vettore multidimensionale.
Esempi di finalità specifiche che la fase di feature
extraction si può prefiggere (per esempio per migliorare il
successivo riconoscimento):
Riduzione del rumore e di altre informazioni non utili
Estrazione di dati invarianti per determinate trasformazioni (es.
rotazione e scala)
Normalizzazione dei dati per renderli maggiormente confrontabili
Multimedia
Feature globali
Le feature globali (per immagini non
opportunamente segmentate) sono inefficaci
se l’oggetto cercato non è separato dal
background
L’orientazione corrente è utilizzare feature
locali che in genere dipendono sia dalla forma
che dalla texture degli oggetti presenti nella
scena
Multimedia
Feature locali
Un passo importante dell’elaborazione visiva
consiste nell’identificare feature locali che siano
utili ad interpretare l’immagine.
Le feature locali sono parti dell’immagine
“facilmente”
rilevabili,
che
possono
corrispondere o meno a parti della scena.
Ci occuperemo nell’ordine di Edge.
Multimedia
Edge Detection
L’estrazione dei contorni
(edge) è sicuramente uno
degli argomenti che hanno
ricevuto più attenzione nella
letteratura
sull’image
processing. Il contorno di un
oggetto rappresenta infatti
la separazione tra l’oggetto
e lo sfondo o tra l’oggetto ed
altri oggetti, per cui la sua
estrazione è molto spesso il
primo
passo
verso
l’individuazione dell’oggetto.
Multimedia
Edge su Lena
Multimedia
Origine degli edge
surface normal discontinuity
depth discontinuity
surface color discontinuity
illumination discontinuity
Multimedia
Edge Detection
Un edge si presenta in una immagine come il
confine tra due regioni caratterizzate da proprietà
dei livelli di grigio in qualche modo distinguibili.
Ipotizziamo inizialmente che le regioni in questione
siano sufficientemente omogenee, di modo che la
determinazione della transizione tra le due regioni
sia possibile sulla sola base della discontinuità dei
valori di grigio.
Le prime tecniche di edge detection che
analizziamo sono basate sull’applicazione di un
operatore locale di derivata.
Multimedia
Edge Detection: Teoria
Consideriamo
il
comportamento
delle
derivate
in
corrispondenza a particolari andamenti del livello di grigio f(x):
andamento costante (segmento piatto nel caso 1-D) e
discontinuità, sia a gradino che a rampa, che possono
modellare punti isolati, linee ed edge in una immagine.
Le derivate di una funzione digitale possono essere definite in
termini delle differenze tra i valori assunti dalla funzione in
punti vicini. Qualunque sia il modo con cui si utilizzano queste
differenze, devono essere soddisfatti i seguenti requisiti. La
derivata prima deve essere
– nulla nelle zone piatte
– non nulla in presenza di una discontinuità
– non nulla lungo una rampa
Multimedia
Estrazione dei contorni
Gli operatori locali ci aiutano ad estrarre i
contorni da una immagine.
I contorni sono definiti come delle
discontinuità locali della luminanza.
Gli edge detector forniscono immagini in cui
sono preservate le variazioni di luminanza ed
eliminate tutte le altre informazioni.
Multimedia
136
Esempi di lato in 1D
Multimedia
137
Edge in pratica
Multimedia
Direzione del gradiente
Multimedia
Edge detector basati sulla derivata
prima
Se ho un segnale monodimensionale e calcolo la
derivata prima, scopro che i lati sono i
corrispondenza dei massimi della derivata.
Quindi i filtri devono calcolare la derivata in
direzione x quella in direzione y e poi combinarle
insieme.
Multimedia
140
Filtri basati sul gradiente
L’implementazione di queste equazioni può essere effettuata
usando le seguenti maschere 2x2 dette anche operatori di
Roberts:
-1
0
0
-1
0
1
1
0
I valori assoluti delle risposte delle due maschere vengono
sommati per determinare ∇f. Più comune è tuttavia l’impiego
di maschere 3x3, che rendono più semplici le operazioni di
filtraggio:
0
0
0
0
0
0
0
1
0
0
0
1
0
0
-1
0
-1
0
Multimedia
Operatori di Roberts: Esempi
Multimedia
Filtri basati sul Gradiente
Gli operatori di gradiente sicuramente più diffusi, in grado
di effettuare simultaneamente la differenziazione lungo
una direzione e una media spaziale lungo la direzione
ortogonale, che riduce la sensibilità al rumore, sono:
Prewitt
Sobel
Multimedia
Kernel notevoli: lati orizzontali
Ne esistono molti, ne presentiamo due:
X-Prewitt
Multimedia
144
Sobel x
Multimedia
145
Prewitt x
Multimedia
146
Dopo
l’applicazione di
X-Prewitt e un
passo di
equalizzazione
Dopo
l’applicazione di
x-Sobel e un
passo di
equalizzazione
Kernel notevoli: lati verticali
La situazione è identica al caso dei lati
orizzontali, i filtri sono solo ruotati di 90 gradi.
Multimedia
148
Sobel y
Multimedia
149
Prewitt y
Multimedia
150
Dopo
l’applicazione di
Y-Prewitt e un
passo di
equalizzazione
Dopo
l’applicazione di
y-Sobel e un
passo di
equalizzazione
Migliori risultati…
Si ottengono con algoritmi più sofisticati (non lineari)
per il calcolo della grandezza del gradiente (somma
del quadrato della risposta di un edge finder
orizzontale e del quadrato della risposta di un edge
finder verticale)
Si ottengono con strategie più “intelligenti” (algoritmo
di Canny, algoritmi fuzzy, tecniche di backtracking
eccetera)
Multimedia
152
Edge detector basati sulla derivata
seconda
Se ho un segnale
monodimensionale
e calcolo la
derivata seconda,
scopro che in
corrispondenza del
lato essa passa
per lo zero.
Multimedia
153
Kernel notevoli: Laplaciano
Il filtro più diffuso per calcolare la derivata seconda è detto
Laplaciano, ed è definito dalla maschera:
Multimedia
154
Laplaciano
Multimedia
155
Laplaciano
Multimedia
156
Zero-crossing
Dopo aver applicato l’operatore Laplaciano è
necessario che si verifichi la condizione di
Zero-crossing. Cioè, deve sempre accadere
che rispetto al punto in questione ci sia nel
suo intorno un valore positivo e un valore
negativo.
Multimedia
157
Filtri di sharpening
Sono filtri il cui scopo è quello di
incrementare la nitidezza di una immagine
aumentando il contrasto locale.
Questa è una operazione opposta allo
sfocamento.
Per ottenere tale effetto si può adottare una
maschera che, derivata dal Laplaciano,
“rinforza” i lati presenti nell’immagine.
Purtroppo essa rinforza anche il rumore
presente nella immagine!
Multimedia
158
Filtro di sharpening
Multimedia
159
Unsharp mask: un algoritmo non lineare
L’uso del kernel derivato dal Laplaciano per fare edge
enhancing ha un difetto: esso viene applicato SEMPRE a tutti
i pixel dell’immagine.
Come conseguenza esso accentua i “dettagli” anche nelle
zone omogene mettendo in evidenza i difetti ed il rumore.
Sono stati proposti vari algoritmi per evitare questo
fenomeno.
La famiglia di algoritmi chiamata unsharp mask è la più
famosa usata per questo scopo.
Noi non vedremo i dettagli di questo algoritmo.
Multimedia
160
Edge Detection in pratica
Multimedia
Ancora Noise
Gli operatori di gradiente risultano quindi poco efficaci in presenza di
rumore. Per esempio, applicando gli operatori di Sobel ad una
versione rumorosa dell’immagine di test si ottiene:
Il problema può essere alleviato estendendo l’area di calcolo del
gradiente, il che consente una migliore azione di media (Farlo per
esercizio). Più in generale, possono essere presi in considerazione
degli operatori composti, nei quali una operazione di smoothing per la
riduzione del rumore è compiuta prima dell’operazione di
differenziazione.
Multimedia
Operatore DroG
Un esempio molto noto di operatore di gradiente composto è la
Derivata della Gaussiana (DroG), nel quale l’operazione di smoothing
utilizza una funzione gaussiana.
La gaussiana è una funzione a simmetria rotazionale la cui equazione
nel caso 2-D continuo è la seguente:
h ( x, y ) = e
x2 + y2
−
2σ 2
=e
r2
−
2σ 2
Il valore di σ determina l’apertura della Gaussiana (ovvero la
deviazione standard ossia ossia il valore di r per il quale h si riduce a
1/√e del massimo), che aumenta al crescere di σ.
Multimedia
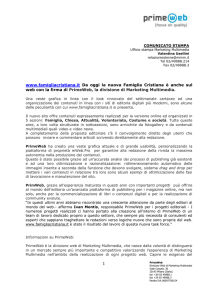
Operatore DroG
In figura una funzione gaussiana in cui h
è rappresentata, per diversi valori di σ, al
variare di r, quindi in un piano passante
per il suo asse di simmetria.
Dalla risposta impulsiva è possibile
ricavare i coefficienti del relativo kernel di
convoluzione attraverso un opportuno
campionamento della funzione continua,
a partire dalla origine, che rappresenta il
punto di applicazione della maschera.
Nel caso della gaussiana il ruolo di σ è
determinante nella definizione dei pesi
della maschera: se l’apertura è maggiore,
l’azione di filtraggio può riguardare un
intorno più ampio del punto centrale. A tal
fine, σ è normalmente espresso in pixel.
Multimedia
Gaussiana con Kernel 3x3, 5x5 (sigma = 0.5)
Per quanto riguarda l’operatore DroG, le risposte impulsive lungo le due direzioni, che
lo caratterizzano completamente, si possono determinare effettuando la convoluzione
delle due componenti del gradiente, nella formulazione preferita, con la maschera
precedente che caratterizza la gaussiana.
Multimedia
Operatore DroG
In alternativa, si può procedere al calcolo delle derivate della gaussiana
rispetto a x e a y, che rappresentano le componenti dell’operatore DroG
nel caso continuo:
x
∂h
=− 2 e
∂x
σ
x2 + y2
−
2σ 2
y
∂h
=− 2 e
∂y
σ
x2 + y2
−
2σ 2
Le corrispondenti maschere si possono ottenere campionando le due
funzioni. Per esempio, per la componente lungo x si ha la seguente
situazione, sempre nell’ipotesi σ = 0.5:
Multimedia
Operatore DroG
Multimedia
Operatori basati sul Laplaciano
La determinazione degli zero crossing della derivata
seconda della f(x,y) localizza con precisione i contorni
dell’immagine, mentre il segno della derivata seconda
permette di stabilire l’appartenenza di un pixel al versante
scuro o al versante chiaro di un contorno.
Un modo molto comune di effettuare le operazioni di
derivata seconda di una f(x,y) in un punto è quello di
calcolare il laplaciano in quel punto. Ricordiamo che data
una funzione f(x,y), il laplaciano di f in (x,y) è definito come:
2
2
∂
f
∂
f
2
L ( x, y ) = ∇ f = 2 + 2
∂x
∂y
Multimedia
OPERATORE LAPLACIANO
Con la traslazione di un pixel in orizzontale, ottenuta sostituendo j con j-1 si calcola il
valore approssimato del laplaciano nel punto (i,j) definito da:
∂2 f
2 = f (i , j + 1) − 2 f (i , j ) + f (i , j − 1)
∂x
operando in modo analogo per la componente verticale si ottiene:
∂2 f
2 = f (i + 1, j ) − 2 f (i , j ) + f (i − 1, j )
∂y
Queste approssimazioni conducono alle corrispondenti maschere di convoluzione
orizzontale e verticale:
1
hR = [1 −2 1]
hC = −2
1
Dalla combinazione delle componenti orizzontali e verticali si ottiene una singola
maschera di convoluzione del laplaciano:
0 0 0 0 1 0 0 1 0
h(i , j ) = 1 −2 1 + 0 −2 0 = 1 −4 1
0 0 0 0 1 0 0 1 0Multimedia
Operatori basati sul Laplaciano
Il modo più semplice di approssimare il laplaciano nel caso
discreto consiste nel calcolo delle differenze delle derivate
prime lungo i due assi:
L(x,y)=[f(x,y)-f(x-1,y)]-[f(x+1,y)-f(x,y)]+[f(x,y)-f(x,y-1)]-[f(x,y+1)f(x,y)]
Pertanto
L(x,y)=4 f(x,y)-f(x-1,y)-f(x+1,y)-f(x,y -1)- f(x,y+1)
Il Laplaciano si può quindi implementare come un filtro la cui
risposta impulsiva è:
0
-1
0
-1
4
-1
0
-1
0
Multimedia
Operatori basati sul Laplaciano
La versione normalizzata prevede un fattore moltiplicativo pari a ¼
Una versione (normalizzate) del laplaciano riferito agli 8-vicini, quindi con le
differenze delle derivate prime mediate su tre righe e tre colonne, è:
-2
1
-2
1
4
1
-2
1
-2
In questo caso il fattore moltiplicativo è pari a 1/8.
Il laplaciano è eccessivamente sensibile al rumore (in quanto operatore di
derivata seconda) ed è incapace di rilevare la direzione del contorno (in
quanto entità scalare).
Per tali motivi, il laplaciano è raramente usato da solo per l’edge
detection.
Multimedia
Laplacian of Gaussian
Di Marr e Hildreth è stata l’idea di
utilizzare il laplaciano in connessione
con un filtro di smoothing, ancora una
volta una gaussiana, realizzando un
operatore detto Laplaciano della
Gaussiana o LoG (in figura una
sezione trasversale ottenuta per σ=1)
h ( x, y ) = e
x2 + y2
−
2σ 2
r −σ
∇ h=−
e
2
2σ
2
2
2
=e
r2
−
2σ 2
r2
−
2σ 2
Multimedia
LoG in 2D
Si tratta quindi di una funzione a
simmetria circolare, con ZC per r=±σ
Si può dimostrare che il valor medio
della funzione è 0, e lo stesso
avviene per il risultato della sua
convoluzione con una immagine. La
tipica forma a sombrero indica inoltre
che la convoluzione dell’operatore
LoG con una immagine provoca un
blurring (di entità proporzionale a σ)
dell’immagine stessa, e quindi ha un
effetto positivo in termini di riduzione
del rumore.
Multimedia
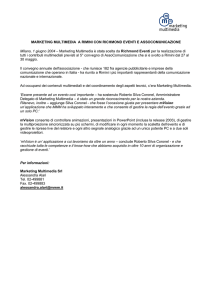
LoG
Il
vantaggio
principale
offerto
dall’operatore LoG resta comunque
quello legato alla presenza degli ZC.
All’immagine in alto a sinistra viene
applicato l’operatore LoG, con il
risultato mostrato in alto a destra
come immagine di intensità, nella
quale i neri rappresentano i valori più
negativi, i bianchi i valori più positivi.
Dopo la binarizzazione: valori
negativi a 0 e i valori positivi a 1 (in
basso a sinistra). Gli ZC, cioè i
confini tra zone nere e bianche
nell’immagine binaria, sono ora
facilmente individuabili (in basso a
destra)
Multimedia
Laplaciano e Zero Crossing
Multimedia
Edge Linking
Multimedia
Metodo di Canny
Un approccio analitico è stato invece seguito da J. Canny, che ha
studiato in dettaglio il comportamento dell’operatore gradiente applicato
ad un contorno rumoroso.
Il modello di bordo considerato è un fronte ripido
monodimensionale b(x) cui è aggiunto rumore Gaussiano bianco.
Si assume che l’individuazione del bordo sia realizzata tramite una
convoluzione con un filtro f(x) avente risposta impulsiva h(x)
antisimmetrica e nulla al di fuori di un intervallo [-W,W].
Un bordo è individuato da un massimo locale della convoluzione tra
l’immagine ed il filtro. Il filtro è scelto sulla base di tre criteri di
efficacia definiti da Canny.
Multimedia
Criteri di Canny
Buona capacità di individuazione:
l’operatore ha una bassa probabilità di non
individuare un bordo reale (elevata sensibilità –
falsi negativi) ed una bassa probabilità di
individuare falsi bordi (elevata specificità – falsi
positivi)
Buona capacità di localizzazione:
i punti evidenziati dall’operatore dovrebbero essere
quanto più vicini possibile al centro del bordo reale
Unicità della risposta:
l’operatore dovrebbe fornire una sola risposta in
corrispondenza di un bordo reale
Multimedia
Canny edge detector
Immagine Input (Lena)
Multimedia
Canny edge detector
Norma del gradiente
Multimedia
Canny edge detector
thresholding
Multimedia
Canny edge detector
Thinning (non-maximum suppression)
Multimedia
Canny
Step 1 – Calcolo Gradiente (Drog): magnitudo e
direzione
Step 2 – Eliminazione dei punti il cui valore del
gradiente non è superiore ai valori dei vicini
(interpolazione lineare) nella direzione del
gradiente
Step 3 – Sogliatura con Isteresi mediante 2 soglie
T1 e T2
Step 4 – Edge linking per legare gli strong edge
individuati con eventuali weak edge adiacenti
Multimedia
Canny – Primo Step
L’ Individuazione (detection) dell’edge, si realizza attraverso
la massimizzazione del rapporto segnale-rumore (delle
ampiezze) del gradiente. L’espressione adoperata per il
rapporto s/r è:
dove hE è l’ampiezza del gradino mentre σn è la deviazione
standard del rumore.
Multimedia
Canny – Step 2
I punti riconosciuti come di edge dovrebbero essere il più
possibile vicini al centro dell’edge effettivo. A tal fine è
definito un fattore di localizzazione (h’è la derivata di h):
Multimedia
Canny – Step 3
Per quanto riguarda l’unicità della risposta
dell’operatore la distanza xm tra due picchi del
gradiente, in presenza solo di rumore, è
supposta uguale ad una frazione k della
larghezza W dell’operatore:
xm=kW
Canny ha combinato i tre criteri, cercando il
massimo del prodotto S(h)L(h) soggetto al
vincolo espresso dalla condizione di cui
sopra
Multimedia
Canny - Discussioni
Anche se la complessità della
formulazione
impedisce
la
determinazione di una soluzione
analitica, è possibile procedere alla
ricerca del massimo con metodi
numerici.
La figura mostra i profili di diversi
valori della risposta impulsiva del filtro
di Canny al crescere di xm. Si può
notare come per grandi valori di xm
l’operatore
di
Canny
è
ben
approssimato dall’operatore DroG. In
effetti, il filtro adoperato nelle
implementazioni del metodo di Canny
è proprio di questo tipo.
Multimedia
Canny: Non-Maximum Suppression
L'immagine di risposta all'operatore, se vista come una
superfice 3D, è caratterizzata da valli (valleys) e rilievi. Le
curve di massimo dei rilievi, le creste, sono detti ridges. Per
ottenere una risposta univoca dall'edge detector è
necessario un algoritmo che sopprima tutti i responsi
multipli, ovvero i pixel che sono caratterizzati da valori
alti di risposta all'operatore ma che non sono massimi
locali per esso.
La non-maximum suppression si ottiene cercando i pixel
che sono di massimo per la magnitudo lungo la direzione
del gradiente. Si tengono solo i ridges sopprimendo tutti gli
altri punti che non sono all'altezza massima locale.
Multimedia
Non-maximum suppression
Si verifica l’esistenza di un massimo locale lungo la
direzione del gradiente. Ciò richiede l’interpolazione dei
pixel mancanti (pixel p ed r in figura)
Multimedia
Canny: Thresholding
La qualità dei risultati ottenibili con il metodo di Canny,
superiore a quella di tutti gli altri operatori di gradiente,
si giustifica con il fatto che il metodo utilizza due soglie,
una per la individuazione degli edge più netti, l’altra per
l’individuazione degli edge più deboli. Questi ultimi sono
però presi in considerazione solo se risultano connessi
ad edge netti.
Ruolo fondamentale nell'algoritmo di Canny gioca anche
la scelta di sostituire il tradizionale approccio di
sogliatura (thresholding) a soglia singola con una
tecnica a doppia soglia detta histeresys thresholding.
Multimedia
Canny: Thresholding
La doppia sogliatura (Histeresys thresholding) viene operata
dopo l'applicazione della non-maximum suppression.
Si fissano due soglie T1 e T2 con T1>T2
Tutti i punti di valore maggiore di T1 sono di edge;
Tutti i punti di valore compreso fra T1 e T2 sono detti weak
edges.
Un weak edge diventa edge solo se è contiguo ad un edge.
Multimedia
Canny
Diminuisce pertanto l’influenza del rumore, ed aumenta la probabilità di
rivelare ‘veri’ edge deboli. In tutti i metodi di edge detection basati sul
gradiente, occorre confrontare il risultato dell’operazione di derivazione
in ogni punto dell’immagine con uno (o più) valori di soglia, per
determinare se si tratta di un punto di edge. Il valore di soglia
determina direttamente la sensibilità dell’edge detector.
Per immagini non rumorose, la soglia può essere scelta in modo che le
discontinuità di ampiezza, anche relative a zone a basso contrasto,
siano interpretate come edge. Nelle immagini rumorose la scelta del
valore di soglia è molto più critica, diventando un elemento di tradeoff
tra la possibilità di rivelare falsi contorni (indotti dal rumore) e la
possibilità di mancare contorni veri (relativi a piccoli dettagli).
Multimedia
Edge Linking
Individuato il punto di
edge si costruisce la
tangente
alla
curva
(normale al gradiente in
quel punto) e si usa
questa informazione per
predire il successivo
punto (in questo caso r o
s)
(Forsyth & Ponce)
Multimedia
Canny
Integrando la fase di thresholding con quella di
linking il metodo ne guadagna in robustezza e
versatilità.
Multimedia
Canny
Step 1 – Calcolo Gradiente (Drog): magnitudo e
direzione
Step 2 – Eliminazione dei punti il cui valore del
gradiente non è superiore ai valori dei vicini
(interpolazione lineare) nella direzione del
gradiente
Step 3 – Sogliatura con Isteresi mediante 2 soglie
T1 e T2
Step 4 – Edge linking per legare gli strong edge
individuati con eventuali weak edge adiacenti
Multimedia
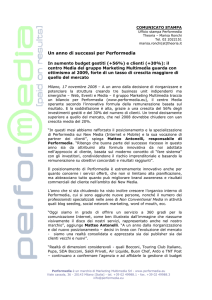
Impatto del parametro σ (Gaussian kernel size)
Input
Canny con σ=1
Canny con σ=2
La scelta di σ impatta sulla detection dei relativi edge come segue:
– Alti valori di σ permettono di trovare edge a scale più grandi
– Piccoli valori di σ permettono di scovare I dettagli più fini
Multimedia
Esempi
Multimedia