Azionamenti Elettrici
Appunti a cura di
Damiano Zito
http://www.damianozito.org
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Indice
Indice............................................................................................................................2
Note Importanti............................................................................................................4
Azionamenti in Corrente Continua.............................................................................5
1.Principio di funzionamento della macchina in c.c........................................................................5
2.Caratteristiche meccaniche ed elettriche.......................................................................................6
2.1.Circuito equivalente della macchina in c.c. per funzionamento da motore..........................7
2.2.Eccitazione indipendente e funzionamento da motore..........................................................7
2.2.1.Regolazione sulla tensione di armatura.........................................................................9
2.2.2.Regolazione sul flusso di eccitazione..........................................................................10
2.2.3.Regolazione sulla tensione di armatura e flusso di eccitazione..................................10
2.3.Eccitazione serie e funzionamento da motore.....................................................................11
2.4.Eccitazione indipendente e funzionamento da generatore..................................................12
2.5.Eccitazione derivata e funzionamento da generatore..........................................................12
3.Modello della Macchina in c.c. in Regime Variabile .................................................................14
3.1.Cenni sui sistemi in controreazione....................................................................................18
3.2.Analisi del transitorio di velocità........................................................................................18
3.2.1.Transitorio di velocità: Gradino di velocità.................................................................19
3.2.2.Transitorio di velocità: Gradino di coppia di carico....................................................20
3.3.Analisi del transitorio di corrente........................................................................................21
3.4.Risultati dell'analisi dei transitori........................................................................................24
4.Gruppi Ward-Leonard.................................................................................................................24
5.Convertitori a commutazione: Ponte trifase a tiristori................................................................26
6.Convertitori Switching: Full-bridge............................................................................................28
7.Modello matematico del convertitore.........................................................................................31
8.Azionamenti in c.c. con convertitori di potenza.........................................................................31
8.1.Condizioni per eliminare il filtro di corrente......................................................................35
8.2.Struttura del regolatore di corrente.....................................................................................38
8.3.Regolatore proporzionale....................................................................................................38
8.4.Regolatore proporzionale e integrale..................................................................................38
8.5.Windup dell'integratore.......................................................................................................39
8.6.Anti-Windup........................................................................................................................40
9.Richiami di controlli automatici: Luogo delle radici..................................................................42
9.1.Regole per il tracciamento del Luogo delle Radici (LdR)..................................................43
10.Regolazione della corrente di armatura di un motore a c.c......................................................44
http://www.damianozito.org
2
Appunti di Azionamenti Elettrici a cura di Damiano Zito
10.1.Compensazione del disturbo (Feed-Forward)...................................................................45
10.2.Regolatore di corrente ad isteresi......................................................................................48
11.Schemi di controllo per azionamenti in c.c...............................................................................50
11.1.Generazione dei riferimenti e chattering del sistema........................................................52
11.2.Schemi di controllo per la regolazione della velocità tramite circuito di eccitazione.......53
12.Frenatura rigenerativa...............................................................................................................59
Azionamenti Brushless...............................................................................................62
1.Classificazione............................................................................................................................62
1.1.Macchina SPM....................................................................................................................63
1.2.Macchina IPM.....................................................................................................................64
1.3.Macchina IM.......................................................................................................................64
2.DC Brushless..............................................................................................................................65
3.Azionamenti DC Brushless: modello matematico......................................................................68
4.Azionamenti DC Brushless: Schemi di controllo.......................................................................72
4.1.Limiti degli azionamenti DC Brushless..............................................................................73
5.Trasformazioni di coordinate: il sistema di riferimento arbitrario..............................................75
6.Trasformazioni di coordinate: il vettore rotante.........................................................................75
7.Macchina Sincrona a Poli Salienti..............................................................................................75
8.Macchina Sincrona a Magneti Permanenti IPM.........................................................................77
9.Azionamenti AC Brushless: modello matematico......................................................................78
10.Azionamenti AC Brushless: Schemi di controllo.....................................................................83
11.Azionamenti AC Brushless: estensione del campo di velocità (deflussaggio).........................90
Azionamenti con Motori Asincroni............................................................................94
1.Principio di funzionamento della macchina asincrona...............................................................94
2.Controllo scalare: Controllo V/f costante ad anello aperto e chiuso..........................................99
3.Controllo scalare: Controllo di Scorrimento.............................................................................103
4.Modello in regime transitorio della macchina asincrona..........................................................106
5.Controllo vettoriale diretto e indiretto: analisi a regime permanente.......................................117
5.1.Schemi controllo vettoriale indiretto.................................................................................121
5.2.Schemi di controllo vettoriale diretto................................................................................124
6.Controllo vettoriale: analisi a regime transitorio......................................................................125
7.Controllo vettoriale: schemi di controllo indiretti....................................................................129
8.Controllo vettoriale: schemi di controllo diretti.......................................................................133
8.1.Misura del flusso al traferro..............................................................................................133
8.2.Modello in tensione...........................................................................................................134
8.3.Modello in corrente...........................................................................................................135
8.4.Modello ibrido...................................................................................................................136
http://www.damianozito.org
3
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Note Importanti
Questo documento in alcun modo pretende di sostituire libri di testo, può contenere errori,
imprecisioni e trattare non molto approfonditamente determinati argomenti.
Gli appunti sono frutto delle lezioni, né più né meno, che ho seguito durante il corso di Azionamenti
Elettrici tenuto dal Prof. Fabio Giulii Capponi presso il Dipartimento di Ingegneria Elettrica (ora
DIAEE) dell'Università Sapienza di Roma. Non vanno oltre lasciando gli approfondimenti come
scelta personale.
A tal proposito esiste un'ottima bibliografia consigliata dallo stesso Prof. Capponi. Io inoltre ho
consultato la tesi di Gabriele Borocci dalla quale ho implementato qualche appunto sul controllo
vettoriale della macchina asincrona.
Nel file (almeno in questa prima versione) non sono presenti le esercitazioni di laboratorio svolte
sempre durante il corso. Chi ha dimestichezza può provare ad implementare quanto viene studiato
con Matlab e Simulink. Manca poi la parte sui trasduttori che rappresenta la prima parte del corso
tenuto dal prof.
Ritengo in ogni caso siano un ottimo supporto per affrontare l'esame. Consiglio ai miei colleghi di
frequentare il corso specie se interessati perché durante le lezioni si riescono a captare molte
informazioni utili. Inoltre il prof è molto preparato e bravo nelle spiegazioni.
Ultime note sulle figure. Molte sono prese dalle slide utilizzate dal professore durante le lezioni.
Altre le ho direttamente create io con Draw di LibreOffice1 o con FidoCadJ2 o scannerizzate dai
libri. Molti schemi a blocchi li ho costruiti su Simulink e altri li ho presi dagli appunti di Emanuele
“Laeman” Freddi3. Alcune figure verso la fine del documento sono quelle originali “a mano”. In una
prossima versione del documento saranno sicuramente sostituite.
Per eventuali errori, correzioni o altro contattatemi pure.
Roma, 23 luglio 2012
Damiano Zito
[email protected]
http://www.damianozito.org
1
2
3
Libre Office è una suite d'ufficio Open Source deriva da OpenOffice, se non sai cos'è fai un salto sul sito.
Qui la pagina di Wikipedia.
Qui il suo sito e gli appunti degli altri corsi.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Azionamenti in Corrente
Continua
1. Principio di funzionamento della macchina in
c.c.
Lo studio degli argomenti contenuti in questo capitolo permetterà una più facile comprensione degli
azionamenti brushless e per macchine asincrone che completano il corso.
Strutturalmente la macchina in cc è la più complessa da realizzare, è composta da una parte fissa
(statore) ad espansioni polari, ed il rotore che rappresenta la parte mobile.
Il sistema di collettore-spazzole, collegato appositamente al rotore (detto anche armatura), permette
di prelevare la tensione continua. Gli avvolgimenti della macchina sono disposti su due strati nelle
cave rotoriche indipendentemente dal tipo di collegamento. Uno strato superiore è collegato ad uno
strato inferiore distante il passo polare τ .
Le lamelle che scorrono fra gli avvolgimenti e che consentono di prelevare la tensione continua,
creano un corto-circuito. In questo preciso istante la fem indotta è nulla perché i conduttori
sull'armatura sono soggetti ad induzione nulla. Questa considerazione vale però finché la macchina
è a vuoto.
Nel funzionamento a carico per effetto delle spazzole e delle lamelle, la corrente di una spira si
divide equamente (per simmetria) in due direzioni. In questo modo sotto un polo la corrente circola
in un verso, sotto l'altro polo circola nel verso opposto.
La mappa di campo è sempre diretta lungo l'asse interpolare. Quando la corrente attraversa l'asse
interpolare la corrente commuta e il campo rimane fisso nello spazio.
I campi di reazione e di eccitazione sono fra loro sempre ortogonali, pertanto massimizzano la
conversione di coppia. Il prodotto I r x Be è sempre massimo, e a livello locale questo prodotto
rappresenta delle forze tangenziali mentre a livello globale è la coppa.
L'andamento della coppia e dell'induzione va tenuto sotto controllo perché bisogna ricordarsi della
saturazione cui può incorrere la macchina.
È chiaro che maggiore è la correte I r maggiore sarà la coppia resistente T r , questa condizione
vuol dire che si sposta l'asse interpolare. Ciò è un problema per la commutazione della corrente nel
conduttore. Inoltre analizzando il campo sotto al polo questo non è più costante per effetto della
saturazione.
Per risolvere questi problemi si adottano alcuni accorgimenti costruttivi. Fra questi:
– l'installazione di poli di commutazione attorno ai quali si avvolgono degli avvolgimenti
attraversati dalla corrente di reazione;
– cave di espansione che servono per realizzare un avvolgimento compensatore in serie
Appunti di Azionamenti Elettrici a cura di Damiano Zito
all'armatura il quale produce un campo sotto l'espansione polare opponendosi a quello di
reazione.
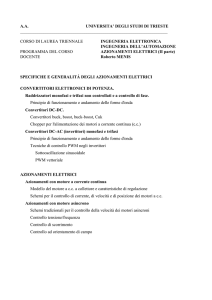
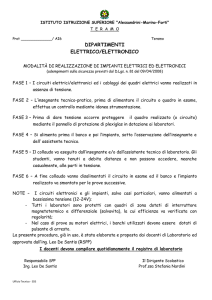
2. Caratteristiche meccaniche ed elettriche
Quando la macchina in cc funziona da generatore è accoppiata ad un motore primo il quale fornisce
l'energia meccanica che viene opportunamente convertita in energia elettrica.
Figura 1: Bilancio energetico della macchina in cc in funzionamento da generatore
La Figura 1 mostra il bilancio energetico e mette in evidenza le perdite nel ferro e nel rame che
avvengono durante la conversione.
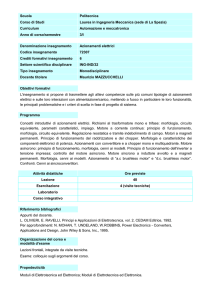
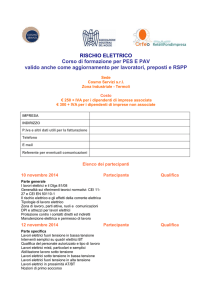
Di seguito viene invece mostra il bilancio energetico quando la macchina funziona da motore.
Figura 2: Bilancio energetico della macchina in cc con funzionamento da motore
Si definiscono:
Potenza meccanica:
P mecc=T ω r=K T Φ e I a ωr
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Potenza elettromagnetica:
P em= E I a= K E ω r Φe I a .
In particolare quando si trascurano le perdite nel ferro e nel rame si ha che K T = K E .
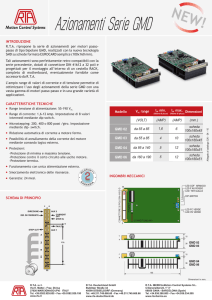
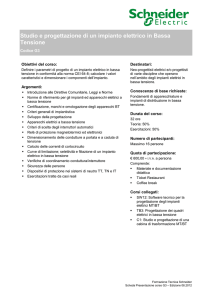
2.1. Circuito equivalente della macchina in c.c. per funzionamento da
motore
Figura 3: Circuito equivalente della macchina in cc (funzionamento da motore)
Si possono scrivere le equazioni in regime permanente che governano il circuito.
Forza elettromotrice indotta:
E=K E ω R Φe
Coppia:
T = K T Φe I a
Tensione di eccitazione:
V ecc =Recc I ecc
Flusso di eccitazione:
Φ e = f (I ecc)
Circuito di armatura:
V a =Ra I a + E .
Il circuito di eccitazione può essere del tipo:
– serie;
– parallelo;
– derivato (Shunt);
– compound.
A seconda dell'eccitazione che viene fornita alla macchina cambiano i vincoli per le equazioni.
2.2. Eccitazione indipendente e funzionamento da motore
Questa configurazione è quella che permette una migliore regolazione della macchina e che verrà
analizzata nel dettaglio più avanti.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Si cerca di esprimere la coppia in funzione delle grandezze della macchina.
Essendo V a =Ra I a + E si ricava I a=
Per cui T = K T Φ I a=K T Φ
V a −E V a−K E ωr Φ
.
=
Ra
Ra
V a −K E ω r Φ
, che può essere meglio nella forma:
Ra
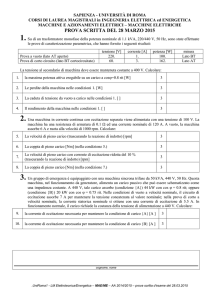
K T Φ V a K T K E ω r Φ2
T=
−
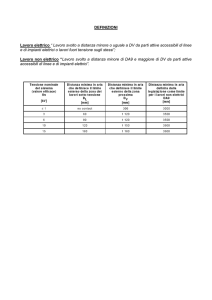
, che è pari a y=mx+q , dove q è il valore della coppia di avviamento.
Ra
Ra
Tavv
Porzione utilizzabile
Ta
ω0
Figura 4: Caratteristica coppi-velocità di un motore in
continua con eccitazione indipendente
La velocità a vuoto vale ω0 =
Va
.
K EΦ
La corrente di avviamento: I avv (ωr =0)=
Va
.
Ra
E quindi la coppia di avviamento: T avv = K T Φ
Va
=K T Φ I avv .
Ra
Si vuole ora confrontare la corrente di avviamento con quella nominale.
Si parte dall'equazione V an= Ran I an +E 0 , facendo il bilancio delle potenze si può scrivere:
2
V
an I an −R
an I an + E
0 I an .
⏟
⏟
⏟
1
Ricavando Ian e facendo il rapporto:
0,1
0,9
I avv V a
Ra
=
=10 , cioè la corrente di avviamento è pari a
I an R a V an−E 0
10 volte quella nominale.
Questa corrente può determinare problematiche di natura termica, ma sopratutto sforzi
Appunti di Azionamenti Elettrici a cura di Damiano Zito
elettrodinamici nel motore (vanno col quadrato della corrente) che quindi saranno 100 volte
maggiori rispetto al funzionamento nominale.
Di questa macchina l'interesse è poter variare la velocità per adattarla al carico di coppia TL.
Analizzando l'espressione trovata per la coppia, si nota che è possibile intervenire su tre grandezze:
– resistenza di armatura (tecnica in disuso perché troppo dissipativa);
– tensione di armatura;
– flusso di eccitazione;
2.2.1.
Regolazione sulla tensione di armatura
Ra
Vb
Va
DC
Va
Tn
TL'
TL
ωr
Figura 5: Regolazione sulla tensione di armatura di una macchina in cc
Se la macchina si trova alimentata a tensione Va pari alla tensione nominale si parte dalla
caratteristica turchese più spessa. L'obiettivo è portare la macchina alla velocità di rotazione
desiderata. Per fare ciò la tensione viene diminuita. Si nota dall'espressione della coppia che le
caratteristiche sono tutte parallele al variare della tensione.
Se poi da una condizione per cui è applicato un carico TL la macchina ruota a velocità ωr e per
qualsiasi ragione questo aumenta fino a TL' allora per garantire la stessa velocità di rotazione si vede
che la tensione deve aumentare (caratteristica verde). Si può arrivare allo stesso risultato
analiticamente.
Si è nella condizione di flusso di eccitazione costante. L'obiettivo è mantenere ωr =cost , per cui
E=K E Φ ω r=cost .
Essendo la coppia T 'L =K T Φ I a , si ricava la corrente. E poiché la tensione V a =Ra I a + E è chiaro
che questa debba aumentare per soddisfare la richiesta.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
2.2.2.
Regolazione sul flusso di eccitazione
Tn
Pn
P = cost
ωn
ω
Figura 6: Regolazione sul flusso di eccitazione per una
macchina in cc con eccitazione indipendente
Si pensi trovarsi nel punto di funzionamento nominale. Anche il flusso sarà quello nomianale. Una
volta raggiunto il punto a velocità nominale che corrisponde alla potenza nominale è possibile
regolare il flusso di eccitazione facendolo diminuire.
Se il flusso si dimezza anche la Tavv si dimezza, ma raddoppia la velocità a vuoto. In generale le
caratteristiche hanno un andamento iperbolico e sono tutte tangenti al tratto a potenza costante, pari
a quella nominale.
Analiticamente:
T = K T Φ I a , quindi se la corrente è costante la coppia è direttamente proporzionale al flusso.
Trovandosi a tensione nominale anche V a =cost , per cui E=cost=K E ωr Φ . Quindi la velocità di
rotazione è inversamente proporzionale al flusso.
Ne segue che T ωr =cost . Questa in altre parole dice che al diminuire del flusso diminuisce in pari
quantità la coppia e aumenta in pari quantità la velocità. La potenza in effetti non può andare oltre
quella nominale.
2.2.3.
Regolazione sulla tensione di armatura e flusso di eccitazione
Effettuando una combinazione delle due regolazioni appena viste si ottiene:
Appunti di Azionamenti Elettrici a cura di Damiano Zito
T
Zona di regolazione a P
costante
Zona di regolazione a T
costante
Va
Φecc
Φecc = Φn = cost
Va = Van = cost
ωn
ωmax
ωr
Figura 7: Regolazione di velocità e del flusso di una macchina in cc con eccitazione
indipendente
T
Van ≡ P
E0 ≡ Pmecc
P ≡ Va
E ≡ Pmecc
Ra Ia = PJ = cost
ωn
ωmax
ωr
Figura 8: Regolazione di velocità e del flusso di una macchina in cc con eccitazione
indipendente con potenze
2.3. Eccitazione serie e funzionamento da motore 4
Rispetto al caso precedente bisogna aggiungere il vincolo I ecc=I a . Si aggiunge poi l'ipotesi di
considerare lineare la caratteristica di saturazione.
V = E+ Ra I ;
E=K E ω ϕ ;
C=K C ϕ I ;
Per cui: V =( K E K ϕ ω r + R a) I . La coppia ha così l'espressione:
4
Fino a prima dell'avvento dell'elettronica di potenza, la macchina in continua con eccitazione serie veniva utilizzata nel campo
della trazione. Oggi si preferiscono macchine in alternata perché dispongono di una densità di potenza maggiore.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
C=K C K ϕ I 2=K C K ϕ
V2
, il cui andamento è quello di un'iperbole quadratica che
( K E K ϕ ω r + R a)
varia con la velocità.
2.4. Eccitazione indipendente e funzionamento da generatore
Si analizza la caratteristica esterna tensione-corrente, la quale indica quanto il generatore reale si
avvicina a quello ideale.
V
Pn
I
Figura 9: Caratteristica esterna di un generatore in cc con
eccitazione indipendente
L'andamento ideale è naturalmente quello orizzontale, ma man mano che aumenta la corrente è
chiaro che aumenta la caduta di tensione sulla resistenza di armatura e di conseguenza la retta
(magenta) si inclina di un certo angolo. Se poi non sono stati presi provvedimenti per contrastare la
reazione di armatura allora l'andamento è quello rappresentato dalla curva rossa, la quale appunto
identifica la caduta di reazione.
L'obiettivo in questa configurazione è mantenere costante la tensione erogata. Per fare ciò per una
certa corrente di armatura, il modo migliore è traslare verso l'alto la caratteristica, ovvero aumentare
la fem indotta aumentando la velocità di rotazione. La regolazione di tensione quindi funziona
variando la velocità di rotazione all'aumentare della corrente compensando la velocità resisitva.
Un altro modo, se la velocità è costante, è quello di aumentare il flusso di eccitazione. Bisogna però
considerare la non linearità del flusso.
2.5. Eccitazione derivata e funzionamento da generatore
Il caso di eccitazione derivata è quello più comune per un generatore, perché si cerca di autoeccitare
la macchina. Sul circuito di eccitazione si introduce il reostato per raggiungere questo scopo.
L'avviamento normalmente si effettua a vuoto.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
V
E0
ER
Iecc
Figura 10: Caratteristica di un generatore in cc con
eccitazione derivata
La tensione eventualmente presente sull'armatura viene utilizzata per alimentare il circuito di
eccitazione. La caratteristica infatti, poiché la macchina “memorizza” la magnetizzazione
precedente, è in grado di fornire tensione diversa da zero anche a corrente nulla. Si noti però che
tale tensione non è in grado di alimentare il carico e per questo motivo l'avviamento viene effettuato
a vuoto. Questo campo, una volta che viene messo in rotazione il rotore, determina una fem indotta,
quindi una corrente di eccitazione che porta la tensione ad un valore maggiore. Il circuito di
eccitazione viene così alimentato sempre a tensione maggiore con un conseguente aumento di
corrente di eccitazione. Il processo di auto-eccitazione si arresta nel punto di funzionamento stabile
all'intersezione fra le due caratteristiche.
È evidente che la rotazione per queste macchine ha un verso predefinito.
Si noti ancora che la caratteristica a vuoto in turchese, può essere variata variando il reostato nel
circuito di eccitazione. Ciò permette di trovare l'equilibrio tra fem indotta e corrente di eccitazione.
Una volta raggiunta la posizione di equilibrio è possibile analizzare la situazione a carico.
La corrente I a=I + I ecc≃I .
La caratteristica diventa non lineare.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
V
E
V = Ra Ia
Tratto
approssimato
come lineare
Icc
Ia
In
Figura 11: Caratteristica a carico di un generatore in cc con
eccitazione derivata
All'aumentare della Ia diminuisce la tensione, quindi la corrente di eccitazione e la fem indotta. Si
tratta di una parabola ad asse orizzontale. Il tratto stabile è quello superiore all'intersezione (punto
di funzionamento) con la caratteristica esterna.
La corrente di corto-circuito in questa macchina non è vista come sovraccarico, ne determina quindi
una robustezza della macchina stessa.
3. Modello della Macchina in c.c. in Regime
Variabile
Equazione di campo (field):
v f =R f i f + L f
Equazione di armatura:
v a =Ra i a + La
F.e.m. Indotta:
e a= K E ω r Φ f
Equazione di coppia (torque):
T em =K T Φ f i a
Equazione meccanica:
T em −T L =J
di f
dt
di a
+ ea
dt
d ωr
+ B ωr .
dt
Il modello viene analizzato dal punto di vista della teoria dei controlli automatici. In generale si ha:
{
ẋ= f (x , u ,t ) ,
y=g ( x , u , t)
dove
x = stati;
Appunti di Azionamenti Elettrici a cura di Damiano Zito
y = variabili di uscita;
u = variabili di ingresso.
Il sistema appena descritto può essere messo sotto la forma di sistema proprio:
Ax+Bu ,
{ẋ=
y =C x+ D u
se poi D = 0 il sistema si dice strettamente proprio.
Nel modello della macchina si vogliono determinare le variabili di stato, gli ingressi, gli eventuali
disturbi e le uscite. Risulta così:
()
i ecc
v
; u= a ; d =T L .
x= i
a
v ecc
ωr
Scritte le equazioni che descrivono la macchina in corrente continua, si mettono in evidenza le
variabili di stato, o meglio le derivate delle variabili di stato che rappresentano l'energia
immagazzinata5 nel sistema.
di f v f R f
= − i ;
dt L f L f f
di a
R
K
I
=− a i a− E ωr Φ f + v a
dt
La
La
La
d ωr
KT
B
1
=− ω r +
Φ f i a− T L
dt
J
J
J
dove:
K T Φ f i a−T L =J
d ωr
+ B ωr
dt
Φ f =K Φ i f .
Ovvero:
di f v f R f
= − i
dt L f L f f
di a
R
1
1
=− a i a− e+ v a
dt
La
La
La
d ωr
B
1
1
=− ω r + T L + T em .
dt
J
J
J
Avendo sostituito:
e=K E ωr Φ f
T em =K T Φ f i a .
5
Energia cinetica:
1
1
ζ k = J ω¿ 2+ ζ 0 ; energia magnetica: ζ m= L i 2 + ζ mo . Si trascura l'energia termica.
2
2
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Scritte le equazioni e ricordando che in fisica vale il principio di causa-effetto si utilizza la
schematizzazione a blocchi per studiare la macchina mantenuto tale principio. Per cui ciò che sta a
sinistra dell'equazione è la causa, mentre la parte a destra ne è l'effetto.
dif/dt
vf
if
1/Lf
Phi_f
Integrale
TL
1/J
dw/
dt
X
Integrale
va
+
1/La
Integrale
-
Rf / Lf
-
w
Kt/J
dia/
dt
B/J
ia
Integrale
-
Ra/La
1/La
Ke
X
Figura 12: Schema a blocchi non lineare della macchina in cc
Ad ogni integrale corrisponde una variabile di stato. Questo perché ad ogni operazione viene
immagazzinata dell'energia e l'integrale non è altro che un accumulo.
Il modello presenta delle non linearità per via delle moltiplicazioni del flusso con la corrente e la
velocità angolare. Per linearizzare il modello si considera costante il flusso di eccitazione.
Quando il flusso è costante si semplifica il circuito di eccitazione. Le equazioni che descrivono il
sistema diventano perciò:
e a = K E ' ωr
T em =K T ' i a
di a
R
1
1
=− a i a− e+ v a
dt
La
La
La
d ωr
B
1
1
=− ω r + T L + T em .
dt
J
J
J
Poiché il sistema è ora lineare può essere studiato analiticamente nel dominio di Laplace. Per
semplificare la trattazione le equazioni che seguono vengono scritte ponendo condizioni iniziali
nulle.
E (s)=K E ' Ω(s)
T em ( s )=K T ' I a ( s)
Theta
Appunti di Azionamenti Elettrici a cura di Damiano Zito
V a (s )=R a I a ( s)+ s La I a ( s)+ E ( s)
da cui si ricava la corrente:
I a (s)=
V a (s)−E (s )
R a+ sLa
esprimibile nella forma:
I a (s)=
1
[V ( s)− K E ' (s) Ω( s) ]
Ra + sL a a
T em ( s )−T L ( s)=sJ Ω (s)+B( s)
da cui si ricava la velocità:
Ω(s)=
1
[ K ' I (s )−T L (s )] .
B + sJ T a
A questo punto è possibile cambiare il diagramma a blocchi, equivalente al precedente ma nella
variabile s di Laplace, che descrive la macchina in continua. Si trova un modello costituito da due
equazioni differenziali lineari del primo ordine. Si noti che le due equazioni sono indipendenti tra
loro e sono funzioni delle due costanti.
Figura 13: Schema a blocchi della macchina in corrente nella variabile s
Le soluzioni delle equazioni lineari sono legate alla costante di tempo e sono di tipo esponenziale
−t
e τ . In questo caso sono due, una legata alla costante di tempo elettrica del circuito di armatura e
l'altra alla costante di tempo meccanica.
L'obiettivo per lo studio in regime variabile è capire come varia la velocità di rotazione al variare
della tensione di armatura e della coppia di carico. Poiché il modello è lineare si può applicare il
principio di sovrapposizione degli effetti. Per fare ciò bisogna creare due funzioni di trasferimento
ad anello chiuso ed in particolare una prima fdt che fornisce la ωr rispetto alla V a quando T L è
nulla ed una seconda fdt che fornisce la ωr rispetto la T L quando V a =0 .
Appunti di Azionamenti Elettrici a cura di Damiano Zito
3.1. Cenni sui sistemi in controreazione
Y*
+
ε
u
G(s)
P1(s)
-
d
+
Y
P2(s)
+
YR
H(s)
Figura 14: Sistema in controreazione
Nei sistemi in controreazione, la regola per determinare la funzione di trasferimento è: “blocchi
della catena diretta diviso tutti i blocchi nell'anello di controreazione”.
La funzione di trasferimento ingresso-uscita indicata generalmente con lettera W vale
W (s)=
G P1 P2
Y (s )
.
=
*
Y (s ) 1+G P 1 P 2 H
Si fa notare che al denominatore il segno positivo va invertito con quello negativo qualora la
controreazione sia positiva.
La fdt disturbo-uscita vale invece:
W d ( s)=
Y ( s)
P
=
.
D( s) 1−G P1 P 2 H
Si noti che in questo caso la controreazione è positiva quindi al denominatore vi è il segno negativo.
3.2. Analisi del transitorio di velocità
A questo punto è possibile ricavare le due funzioni ad anello chiuso cercate per la macchina in
continua6.
Svolgendo tutti i passaggi in base alle definizioni appena date si ottengono:
G1 (s)=W ( s)=
KT
,
(R a + sLa )( B+ sJ )+ K T K E
G2 (s )=W D (s)=
R a + s La
.
( Ra + sL a)( B+ sJ )+ K T K E
Applicando il principio di sovrapposizione degli effetti si ricava la velocità di rotazione:
Ωr ( s)=
6
KT
R a + s La
V a (s)−
T ( s ) ovvero,
(R a + sLa )(B + sJ )+ K T K E
( Ra + sL a)( B+ sJ )+ K T K E L
Da qui in avanti le costanti saranno indicate per semplicità di notazione come
semplificazione sulla linearità del flusso.
'
KT = KT
e
'
K E =K E
. Si ricordi però la
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Ωr (s)=G 1(s )V a ( s)+G 2 ( s) T L (s) .
Per semplificare la trattazione vengono fatte alcune ipotesi:
•
B=0
•
J = Jm .
Si considera solo l'inerzia del motore e non quella del carico. Si noti però che questa è la
semplificazione che può cadere perché può capitare che il carico abbia un'inerzia maggiore.
Per cui:
G1 (s)=
KT
=
sJ m ( R a + sLa )+K T K E
1
KE
(
L J
R J
s a m +s a m +1
KT KE
KT KE
2
)
.
Il denominatore si trova nella forma di un sistema del II ordine, generalmente scritto come
k
. Dove ω0 è la pulsazione di oscillazione naturale attorno alla quale il
s s2
1+ 2 ζ ω0 è ω0
sistema inizia ad oscillare. Tali oscillazioni sono smorzate da ζ (coefficiente di smorzamento), per
cui quando ζ=0 si hanno oscillazioni infinite.
ω( s)=
Definendo:
τ e=
La
costante di tempo elettrica,
Ra
τ m=
Ra J m
costante di tempo meccanica.
KT K E
Grazie a queste due definizioni si può ancora scrivere:
G1 (s)=
1
.
K E (s τm τ e + s τ m+ 1)
2
Si può procedere con ulteriore semplificazione, ovvero τ m≫ τ e . In generale la costante di tempo
meccanica è 2 ordini di grandezza più grande della costante di tempo elettrica. Quindi:
G 1 (s)≃
1
1
≃
.
K E (1+ s τ m )(1+ s τ e ) K E (1+ s τ m )
La costante di tempo elettrica è molto più veloce di quella meccanica (è quasi istantanea e arriva
molto presto a regime) quindi può essere trascurata (teorema del valore finale).
3.2.1.
Transitorio di velocità: Gradino di velocità
Si pensi di applicare un gradino di tensione V a (s)=
Ωr (s)=
ΔV
. La velocità vale:
s
ΔV
1
A
B
. Dopo aver ricavato la forma in poli e residui Ωr (s)= +
si può
K E s (1+ s τ m )
s 1+ s τm
Appunti di Azionamenti Elettrici a cura di Damiano Zito
eseguire l'antitrasformata e ritornare nel dominio del tempo:
ω(t )=
(
)
t
−τ
ΔV
1−e
+ω(0) .
KE
m
Figura 15: Velocità del motore nel tempo (con ia = 0 per cui Va = ΔV). Ke= Ke'
3.2.2.
Transitorio di velocità: Gradino di coppia di carico
−Ra + sL a
. Raccogliendo sempre i fattori K T e K E
(Ra + sLa )(B+ sJ )+ K T K E
a fattore comune al denominatore e la resistenza di armatura al numeratore, e introducendo
nuovamente le costanti elettrica e meccanica, si ottiene:
La fdt da analizzare è G2 (s )=
G2 (s )=
−R a
(1+ s τ e )
Ra
1
.
=−
K T K E ( 1+ s τ m)(1+ s τe )
K T K E (1+ s τ m )
Il gradino di coppia di carico applicato alla macchina è T L (s )=
ΔT
, per cui la velocità di
s
rotazione della macchina in continua vale:
Ωr ( s)=
−Δ T Ra
1
.
K T K E s (1+ s τ m)
Come per il caso precedente, antitrasformando si ottiene la velocità nel dominio del tempo:
ωr (t)−
t
Δ T Ra
−
(1−e τ )+ωr (0) .
KT KE
m
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 16: Transitorio di velocità per un gradino di tensione e un gradino di coppia di carico
A questo punto è utile andare a verificare il comportamento a regime della macchina e studiare la
risposta della corrente per un gradino di coppia di carico.
A regime permanente la coppia motrice è pari a quella di carico che vale T L =Δ T = K T I a per cui
I a=
ΔT
.
KT
La tensione di armatura come si può vedere in figura è costante (gradino).
La condizione di equilibrio cercata vale: V a =Ra I a + E
Mentre la condizione a vuoto (prima del gradino di coppia): V a =E 0=K e ω0 .
Per ottenere la condizione di equilibrio e quindi una corrente di armatura diversa da zero in grado di
erogare la coppia necessaria, dovrà necessariamente diminuire E e dunque la velocità (essendo Va =
cost.):
K E ω 0=R a
ΔT
+K E ω →
KT
K E (ω 0−ω)= Ra
ΔT
.
KT
La variazione di velocità vale così:
Δ ω=
R a ΔT
, cioè il valore a regime.
KE KT
3.3. Analisi del transitorio di corrente
La trattazione di questo transitorio è semplificata.
I a (s)=
1/ R a
[Va( s )−K E Ω (s)] .
1+ τ a s
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Questa equazione in sostanza dice che il comportamento della corrente è quello che avrebbe in un
circuito RL dove la tensione, istante per istante, è quella di armatura sottratta della fem indotta.
Figura 17: Analisi del transitorio di corrente
Poiché la fem indotta dipende dalla velocità, anch'essa avrà dei transitori legati alla costante di
tempo meccanica.
Il comportamento di ωr moltiplicato per K E è quello della fem indotta. La porzione di area
tratteggiata in rosso (Figura 17) rappresenta la differenza V a −E .
In Figura 18 è riportato uno zoom del transitorio della fem indotta e della corrente di armatura.
Inizialmente la differenza fra le tensioni può essere trascurata e può essere considerata pari proprio
a V a perché la velocità iniziale è pari a zero.
Quindi il transitorio di corrente iniziale è i(t)=
ΔV
( 1−e−t / τ ) , per poi attestarsi sul valore di
Ra
a
ΔV
(vedi Figura 18). Se poi il gradino di tensione è pari alla tensione
Ra
nominale della macchina ( V an ), allora il valore a regime di corrente è pari a quello di corto-circuito
– e quindi di avviamento - della macchina visto nello studio in regime permanente.
regime pari a i(t)=
Il valore di picco della corrente si avvicina a quello di corto-circuito quanto più è grande la
differenza τ m−τ a , cioè quanto più è lenta la costante di tempo elettrica rispetto quella meccanica.
Mentre la corrente sale rapidamente sale anche la velocità e di conseguenza diminuisce la tensione
Appunti di Azionamenti Elettrici a cura di Damiano Zito
che viene fornita al circuito RL ( V a −E ). La variazione di tensione è lenta, per cui le variazioni di
corrente non sono percepibili.
In un secondo momento la corrente scende con un andamento legato alla costante di tempo
meccanica fino al valore zero, perché la coppia è nulla.
Va
E
t
ΔV / Ra
t
Figura 18: Dettaglio del transitorio della fem indotta
e della corrente di armatura
Quando viene applicato il gradino di coppia, la corrente parte dal valore iniziale nullo e arriva al
ΔT
valore finale
.
KT
τm – τa maggiore
τm – τa minore
Van / Ra
t
Figura 19: Picco di corrente in funzione delle costanti meccanica ed
elettrica
Si noti che il rapporto fra i picchi di corrente nel grafico in Figura 17 è circa 10.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
3.4. Risultati dell'analisi dei transitori
Dall'analisi svolta si possono trarre delle conclusioni importanti, già note in parte dallo studio in
regime permanente.
In particolare si evince che:
1. Variando la tensione varia la velocità. Ciò era già noto ma ora è possibile sapere anche
come avviene tale variazione (costante di tempo meccanica).
2. A pari tensione, se viene applicato un carico, la velocità diminuisce. Quindi per mantenere
costante la velocità deve aumentare la tensione ma questa va variata al variare del carico.
Sarà quindi necessario un sistema di controreazione che sente la variazione di tensione e
agisce per compensare il transitorio e mantenere così la velocità costante.
3. Per un gradino di tensione si è visto che la corrente arriva fino a valori molto elevati. Questi
sono inaccettabili non solo per la macchina, ma soprattutto per il convertitore elettronico di
potenza che svolge il compito di regolare la tensione di armatura. Il convertitore va perciò
dimensionato per non superare la temperatura massima di giunzione degli switch. Quindi va
controllata anche la corrente.
4. Gruppi Ward-Leonard
Il gruppo Ward-Leonard è il primo sistema per la regolazione della velocità della macchina in
corrente continua. Oggi è possibile trovarlo ancora in funzione.
Figura 20: Schema di gruppo Ward-Leonard
La regolazione di armatura viene effettuata con un convertitore elettromeccanico.
È costituito da:
– un motore primo, asincrono, alimentato dalla tensione di rete quindi lavora nel tratto
stabile della caratteristica con velocità costante;
– macchina in cc con eccitazione indipendente collegata all'asincrono e che lavora da
Appunti di Azionamenti Elettrici a cura di Damiano Zito
generatore;
– macchina in cc con eccitazione indipendente alimentata dalla precedente.
Figura 21: Circuito del gruppo Ward - Leonard
Di quest'ultima si vuole regolare la velocità dell'albero e può essere effettuata in due modi diversi.
1. Un primo modo è variare la corrente Ifm del circuito di eccitazione del motore, variando il
flusso di eccitazione nel tratto a potenza costante.
2. Variando la tensione di armatura. Siano quindi:
E g= K eg ωrg Φ eg la fem del generatore;
E m= K em ω rm Φ em la fem del motore;
Variando la resistenza del generatore attraverso un reostato, cambia il valore della corrente di
armatura perché varia il flusso di eccitazione e dunque anche la tensione V a ai morsetti. Infatti per
portare la macchina alla velocità desiderata, bisogna erogare una certa coppia e se il flusso di
eccitazione del motore è costante significa imprimere una determinata corrente di armatura. Vi è
quindi una sola tensione di armatura che fa funzionare il circuito in quel punto, così come esiste una
sola fem indotta del generatore che consente di raggiungere la velocità voluta.
Scrivendo l'equazione per il circuito di Figura 21 si trova (E g− E m)=(R eg + R am) I am , da cui si
ricava:
E g= E m (ωrm )+( R am+ Reg )⋅I am (T L )=K eg Φ eg ωrg 7.
Da quest'ultima relazione si trova il flusso di eccitazione che garantisce così la condizione di
funzionalità voluta.
È chiaro che il rendimento di questi gruppi è basso e ciò si spiega dal fatto che si eseguono diverse
conversioni elettromeccaniche.
Il generatore infatti preleva potenza elettrica dall'asincrono per trasformarla in energia meccanica,
questa viene nuovamente convertita e fornita sotto forma di energia elettrica al motore che a sua
volta fornisce in uscita energia meccanica.
7
Si noti che E m (ω rg ) non è un prodotto, ma indica la dipendenza della fem dalla velocità, così come
la dipendenza della corrente dalla coppia.
I am( T L ) indica
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Si noti che se bisogna frenare a carico, il motore deve funzionare da generatore e convertire
l'energia cinetica dell'albero in energia elettrica. Il generatore inizia così a funzionare da motore e
l'asincrono diventa un generatore asincrono. La conversione elettromeccanica pertanto si inverte.
5. Convertitori a commutazione: Ponte trifase a
tiristori
Il primo modo più diffuso per ottenere una tensione regolabile in continua è il ponte a tiristori. Se il
valore efficace della tensione in ingresso è V FF . In uscita si ottiene:
V d =V do cos α ,
dove
V do≃1,35⋅V FF è il valore della tensione in uscita per ponte trifase a diodi;
α è l'angolo di innesco dei tiristori.
Per effettuare la regolazione della velocità della macchina in continua, si varia l'angolo di innesco
(tra 0° e 90°) dei tiristori, per avere una tensione che varia tra 0 e il valore massimo V d0 .
Il massimo teorico dell'angolo di innesco è 180°. Per angoli di innesco maggiori di 90° infatti si
inverte il segno della tensione di uscita. Si noti ora che il ponte a tiristori è unidirezionale e non
permette l'inversione della corrente.
Per poter effettuare la frenatura, quindi creare una coppia opposta a quella positiva, vi è bisogno di
lavorare con corrente negativa, quindi nel quarto quadrante. Nel secondo quadrante (tensione
negativa), come si può osservare in Figura 22, si sta effettuando una frenatura ma rispetto al verso
di rotazione negativo, cioè opposto rispetto a quello convenzionalmente positivo.
La configurazione che permette la frenatura nel verso convenzionale positivo è quella con due ponti
a tiristori collegati in antiparallelo così come mostrato in Figura 24.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
I
M
ω
Tem
M
Tem
ω
Frenatura rispetto al verso
convenzionale invertito.
V
M
ω
Tem
M
ω
Tem
Figura 22: Quadranti di funzionamento con 2 ponti a tiristori
TL
L
M
ω
Figura 23: Meccanica del moto
Tem
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 24: Configurazione back-to-back di 2 ponti a tirisitori
6. Convertitori Switching: Full-bridge
Come alternativa al ponte a tiristori, è possibile utilizzare un ponte detto ad “H”, accoppiato ad un
convertitore dc/dc col vantaggio di ottenere una frequenza di variazione maggiore per la tensione
fornita alla macchina. La struttura tipica, come quella in figura è quella di due rami in parallelo con
Figura 25: Ponte ad "H" per la macchina in cc
due switch per ognuno di essi controllati per ottenere la tensione desiderata in uscita. Quest'ultima è
Appunti di Azionamenti Elettrici a cura di Damiano Zito
una tensione continua, regolabile, che può variare tra +Vs e -Vs. Le configurazioni possono essere:
Q1, Q4 = ON → Vout = Vab = +Vs;
Q3, Q2 = ON → Vout = Vab = -Vs.
Si usano quindi le tecniche di modulazione PWM che consistono nell'accendere/spegnere con una
certa frequenza gli switch, variando la tensione di uscita all'interno di un ciclo di modulazione .
t (Q )
All'interno di questo ciclo si determina il duty-cycle pari a: d = ON i .
T PWM
A causa della frequenza di modulazione (e dei multipli di essa) la tensione disponibile ai morsetti
presenta un certo contenuto armonico. Di questa tensione però si può calcolare il valor medio:
v̄ab=
1
T PWM
t ON
∫ V s dt+
0
1
T
∫ −V s dt= T
T PWM t
ON
1
PWM
[V s t ON −V s (T PWM −tON )]= T
1
[V s (2 t ON −T PWM )] ,
PWM
e cioè:e di che ;)
v̄ab=V s ( 2d−1) . Quindi il valor medio della tensione in uscita dipende dal duty-cycle:
{
v̄ab=0
v̄ab=+V s
v̄ab=−V s
per d =0,5
per d =1 .
per d =0
Per generare la PWM si utilizza un circuito che confronta una tensione modulante, generalmente
chiamata vcontrol , con frequenza pari a quella di uscita, con una portante.
Figura 26: Esempio di tecnica PWM
Un requisito fondamentale per questa tecnica è che la tensione modulante vari molto lentamente
rispetto alla portante in modo da poterla considerare costante all'interno di un periodo di
modulazione. Quando infatti la modulante varia troppo velocemente la tensione in uscita non è più
Appunti di Azionamenti Elettrici a cura di Damiano Zito
esprimibile con l'espressione trovata sopra. È interessante osservare che se la modulante è sempre
ben definita e varia lentamente rispetto alla portante triangolare risulta:
{
v control =0
v control =+V tri
v control =−V tri
per d =0,5
v control
. Allora, andando a sostituire questo
per d =1 , si ricava che d =0,5+0,5
V tri
per d =0
v control
. Si
V tri
realizza cioè una diretta dipendenza fra vcontrol e la tensione di uscita. È importante però che la PWM,
cioè la portante sia sempre triangolare per mantenere questa linearità. Numericamente se la portante
è a 10 kHz, l'azione di controllo deve variare con frequenza massima di 1 kHz (cioè banda passante
almeno una decade inferiore).
valore nell'espressione della tensione in uscita e svolgendo i calcoli si ottiene v̄ab=V s
Si noti infine che il circuito della macchina in cc alimentato dalla tensione che esce fuori dalla
PWM è di tipo RL. L'andamento della corrente per questo circuito dipende dalla costante elettrica
Ra
, ed inoltre presenterà un ripple attorno ad un valor medio che dipende (oltre all'induttanza)
τ a=
La
dal tON e cioè dal periodo di modulazione PWM.
Durante il tON: V s=R a i a+ La
d ia
di
+ E → V s−E= Ra i a + L a a .
dt
dt
Durante il tOFF: −V s =Ra i a + L a
d ia
di
+ E → −V s −E=R a i a+ La a .
dt
dt
Figura 27: Ripple di corrente dovuto alla
modulazione di tensione
Questo ripple8 di corrente provoca oscillazioni di coppia pregiudicando la qualità della macchina, si
desidera quindi eliminarlo. Più avanti viene svolta l'analisi per sfruttare il solo valor medio della
corrente che fornisce il contributo di coppia desiderato.
8
Si noti che il ripple disegnato in Figura 29 è valido nel funzionamento da generatore. In quello da motore il segno della
corrente va invertito.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
7. Modello matematico del convertitore
Fatte le dovute considerazioni sulla PWM e la corrente nel motore in cc, si introduce il modello
generico di un azionamento che presenta un anello più interno di corrente ed uno più esterno di
velocità.
Figura 28: Azionamento generale per il controllo di una macchina in cc
Nello schema appare il PWM Generator, il cui modello matematico si è ricavato da quello del
convertitore, ma invertendolo. Il modello non è dinamico perché si sta trascurando l'energia
immagazzinata che è poca.
Stando quindi a quanto visto nel precedente paragrafo, la tensione media vale ̄v =
Vs
, per
⋅v
V tri control
V tri
⋅v * . In questo modo si ottiene quindi la tensione di controllo in uscita dal blocco
Vs a
PWM Generator che comanderà gli switch.
cui v control =
Per annullare l'errore di velocità viene comandata una coppia desiderata T*. Come è noto questa
dipende dalla corrente che nello schema è indicata come ia* ovvero la corrente desiderata di
armatura. Essa è controllata dalla tensione Va* , cioè la tensione da imporre sull'armatura che serve
appunto per annullare l'errore di corrente.
Eventualmente per ottenere un controllo di posizione bisogna imporre un terzo anello esterno,
usando un trasduttore di posizione si ricava la velocità da imporre per annullare l'errore di
posizione.
Più avanti si analizzeranno le controreazioni dei due anelli.
8. Azionamenti in c.c. con convertitori di potenza
Nella trattazione precedente si è introdotto il modello matematico del convertitore. Se si riesce ad
*
effettuare una stima esatta dei parametri, si può effettuare l'approssimazione v a =v a . Questa
condizione ha dei limiti che la rendono valida.
Nel modello infatti sono state introdotte, anche se indirettamente, delle ipotesi:
Appunti di Azionamenti Elettrici a cura di Damiano Zito
1. Viene trascurato il contenuto alle frequenze di modulazione della v a che esce dal
convertitore.
2. La tensione in uscita dal convertitore non è maggiore della tensione V s del link in continua.
Bisogna quindi ricordarsi della saturazione v a =±V s .
3. Viene trascurato il dead-time degli interruttori. Questo perché il valor medio della tensione è
tempo di commutazione degli switch. Se la modulazione avviene a 10 kHz (TPWM = 100 μs)
il dead-time vale 1÷2 μs.
Figura 29: Schema di controllo con approssimazione del convertitore unitario
Il sistema di controllo, nella maggior parte dei casi, negli azionamenti elettrici è tutto digitale.
Quindi se fPWM = 10 kHz, ci sarà un processore che ogni 100 μs produce un duty-cycle. All'interno
del periodo di calcolo il processore determina il duty-cycle che dovrà quindi applicare nel periodo
successivo.
t di calcolo
t
TPWM
Figura 30: Calcolo del duty-cycle
La frequenza di campionamento per la corrente e la velocità è pressoché simile a quella di
modulazione. Dal teorema del campionamento si ha quindi che la banda passante dell'anello di
corrente non può essere superiore alla metà (5 kHz in questo caso). In realtà però è 10 volte (1
decade) inferiore alla fPWM.
Bisogna inoltre attenzione a non generare aliasing, ovvero creare frequenze che dipendono dalla
differenza tra la f di campionamento e quella del segnale campionato.
Esempio: Se si campiona a 10 kHz un segnale con contenuto a 9 kHz, per effetto del campionato nel
segnale campionato risulterà un segnale a frequenza di 1 kHz. Oppure se si campiona un segnale
con contenuto a 9900 Hz, dentro al segnale campionato sarà presente un segnale a 100 Hz.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Per eliminare questi contenuti in frequenza indesiderati (vicini a quelli di modulazione) bisogna
eliminarli dalla controreazione filtrando la corrente con un filtro che può essere contenuto in H1(s)
cercando di ricavare il valor medio che è quello di interesse.
Ia(s)
=1 , ma questa condizione è irrealizzabile. Il filtro però può essere una
I *a
funzione di trasferimento del I ordine del tipo:
Idealmente si vuole
I a( s )
1
.
* ≃
Ia
1+ τ * s
Una volta che si inserisce il filtro, la banda passante del regolatore di corrente trasla ancora più in
basso. Questo perché alla banda passante del filtro corrisponde uno sfasamento di 45° gradi e quindi
già prima della banda passante si ha un certo errore di fase. Ciò è inaccettabile e dunque il
regolatore di corrente viene posizionato una decade prima rispetto alla banda passante del filtro.
La Figura 31 riporta il diagramma di bode del filtro in questione utilizzano un semplice script in
Matlab:
%Funzione di Trasferimento del Filtro di Corrente
NUM = [0 1];
DEN = [0 0.001 1];
SYS = tf(NUM, DEN);
bode(SYS)
Figura 31: Diagramma di Bode del filtro di corrente
In pratica – si è detto - la fdt non è unitaria, ma si riesce a realizzarne una del I ordine come sopra.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
1 9
La banda passante è τ
e se ci si mantiene abbastanza a sinistra di tale valore, allora è possibile
filter
approssimare la fdt effettiva con quella ideale (quindi unitaria).
Ciò vuol dire che il diagramma a blocchi in Figura 32 può essere approssimato semplicemente con
quello in Figura 34.
Figura 32: Schema semplificato per la regolazione di corrente
Figura 34: Sepmplificazione del diagramma a
blocchi precedente
Figura 33: Semplificazione dell'anello di corrente, rimane solo quello esterno di velocità
Lo schema dell'azionamento si semplifica. L'anello di corrente è più veloce rispetto a quello più
esterno di velocità, si riesce ad “eliminarlo”, o meglio ad approssimarlo con la fdt ad anello chiuso
come mostrato in Figura 33.
Analizzando anche l'anello più esterno si ricava una funzione ad anello chiuso del tipo:
Figura 35: Funzione ad
anello di chiuso Wn(s)
Anche questa funzione di trasferimento avrà una sua banda passante (B3n).
Si noti ora che tra la coppia desiderata e quella realmente impressa, la banda passante è sempre
quella della corrente, quindi le proprietà dinamiche imposte alla regolazione della corrente si
trasformano in regolazione della coppia. Questa considerazione vale sempre a flusso costante.
9
τ PWM =1/ 10000 ; τ filter=1/1000 .
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Si osservi quindi la Figura 36. La fdt tra le coppie può essere approssimata ad uno se le variazioni di
velocità richieste hanno una frequenza almeno una decade inferiore alla banda passante della
corrente.
Figura 36: Schema semplificato, anello di velocità
Riassumendo:
Figura 37: Frequenze richieste nell'azionamento
Grazie a questo grafico è possibile fare un'altra considerazione in merito alla controreazione della
corrente. Nella realtà infatti nella controreazione è presente il trasduttore e il filtro che serve ad
eliminare il contenuto non desiderato. Se si rimane a sinistra di B3i questa controreazione è unitaria.
È altrettanto chiaro che all'interno dell'anello di velocità la dinamica del regolatore di corrente è
possibile considerarla unitaria. Nel prossimo paragrafo si illustra la condizione per cui è possibile
eliminare il filtro di corrente e migliorare la dinamica (e le prestazioni) del sistema.
8.1. Condizioni per eliminare il filtro di corrente
Figura 38: Controreazione nell'anello di corrente
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Nella realtà, nella controreazione dell'anello di corrente sono presenti un trasduttore e il filtro che
come detto ha il compito di eliminare le frequenze di modulazione contenute nel ripple. Se però il
filtro è almeno una decade sopra la banda passante dell'anello di corrente, la controreazione è
unitaria.
Quindi utilizzando adeguati trasduttori e separando adeguatamente le bande passanti è possibile
trascurare completamente il comportamento dinamico del trasduttore e del filtro. Questa
considerazione vale fino al momento in cui non si cerca di spingere l'anello di corrente a frequenze
prossime a quelle del filtro. Così come nella regolazione di velocità, se si pensa di portare più in
alto la banda passante del regolatore di velocità non si può più trascurare la dinamica del regolatore
di corrente.
In ogni caso, se viene eliminato il filtro si può spingere più in alto la banda dell'anello di corrente
entro i limiti esposti.
Ora si osservi la Figura 3910 e si noti che la corrente in determinati istanti di tempo passa per il valor
medio (che è quello di interesse). Pertanto se si campiona negli istanti in cui la corrente vale proprio
la corrente media, e cioè nei picchi della triangolare, non c'è bisogno di filtrare le frequenze PWM
perché il segnale è privo del ripple a tali frequenze.
Di questa considerazione si deve tenere conto sopratutto in fase di programmazione e quindi di
scrittura del codice di calcolo per trascurare via hardware il filtro.
Di conseguenza cambia il diagramma delle frequenze (Figura 40). Ma l'anello di corrente non potrà
essere 1/10 rispetto alla PWM, bensì 1/20, arrivando così a 500 Hz.
La modulazione PWM dipende dai dispositivi utilizzati11:
– i Mosfet consentono di arrivare a decine di kHz;
–
con gli IGBT la massima frequenza è di 20 kHz.
Vanno considerate però le perdite dell'inverter che sono proporzionali alla frequenza di
modulazione. Man mano che aumenta la taglia (cioè la potenza) dell'inverter diminuisce perciò la
fPWM al fine di mantenere alto il rendimento.
10 Si ricordi che la PWM con portante triangolare si dice del tipo center-aligned. Con portante a dente di segna edge-aligned. Nel
primo caso la PWM è sempre simmetrica rispetto al periodo di modulazione, nel secondo iniziano tutte nello stesso istante.
11 Un ponte a tiristori visto in precedenza arriva a frequenze di modulazione di circa 300 Hz.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
v
modulante
t
Va
+Vs
t
-Vs
Ia
Valore medio
t
Figura 39: Modulazione PWM nella macchina in cc
Figura 40: Banda delle frequenze col
filtro trascurato
Appunti di Azionamenti Elettrici a cura di Damiano Zito
8.2. Struttura del regolatore di corrente
Per il regolatore di corrente si ricorre ai PID.
L'errore in questi dispositivi viene trattato in 3 modi in base ai regolatori che si inseriscono:
– proporzionale
– integrale
– derivativo
Questi termini contribuiscono all'azione di comando u. Il regolatore non sempre presenta tutti e 3 i
termini.
8.3. Regolatore proporzionale
Per il funzionamento di questo tipo di regolatore è necessaria la presenza di un errore.
Esso effettua la misura dell'errore e attraverso una costante di proporzionalità comanda una tensione
*
che tende ad annullarlo. A regime permanente se l'errore è nullo la v a è zero. Se si comanda tensione
nulla la corrente è zero e non è la situazione desiderata.
Si noti che alzando molto il guadagno del regolatore è sufficiente un errore molto piccolo per
generare la tensione che serve a far circolare la corrente necessaria.
Il caso limite è naturalmente K p=∞ cui corrisponde (anche per piccolo errore) una tensione
comandata anch'essa infinita ma ciò non è possibile per ovvi limiti, e cioè non è possibile
alimentare la macchina in queste condizioni. Bisogna ricordare il limite in tensione ( ±V s ) e cioè la
saturazione nel convertitore introdotta a pagina 31.
8.4. Regolatore proporzionale e integrale
Quando l'errore è zero il contributo solo proporzionale è nullo, mentre l'integrale di zero è una
costante. Pertanto sarà costante la v a . L'azione integrale annulla l'errore a regime permanente.
Infatti dalla teoria dei sistemi, per avere un sistema di tipo 0 (sistema che annulla l'errore a regime
permanente per un ingresso a gradino) bisogna avere un integrale in catena diretta.
Per avere un sistema di tipo 1, cioè errore nullo a regime permanente per ingresso a rampa, bisogna
avere due integratori in catena diretta. Il servoazionamento è un sistema di tipo 1, cioè un sistema a
prestazioni elevate, che riesce ad deve inseguire riferimenti costanti o variabili nel tempo.
Pertanto se si sottopone un ingresso a rampa al sistema di tipo 0, questo a regime permanente dà un
errore costante.
Con un proporzionale integrale si riesce ad ottenere la fdt con forma desiderata.
Ciò comporta dei vantaggi tecnici ed economici perché si evita di ricorrere al contributo derivativo.
La derivata infatti va effettuata da un filtro nel caso analogico, mentre la derivata numerica è molto
rumorosa. La derivata del gradino è un impulso, quindi per un riferimento di corrente a gradino, il
contributo del termine derivativo andrebbe subito all'infinito. Una qualsiasi variazione brusca del
riferimento si traduce in una tensione di armatura desiderata che porterebbe il sistema in
Appunti di Azionamenti Elettrici a cura di Damiano Zito
saturazione.
ia*
ia
t1
t2
t3
t4
t
t5
va*
va
Vs
t1
t2
t3
t4
t5
t
Figura 41: Windup dell'integratore
8.5. Windup dell'integratore
Si studia il fenomeno del windup dell'integratore considerando il solo termine integrale, trascurando
il termine proporzionale solo ai fini di una trattazione più semplice.
Si parte dalla condizione per cui l'integrale è nullo e si richiede un gradino di corrente ia* . Istante
per istante il regolatore svolge l'integrale dell'errore e comanda una tensione va* che inizia quindi a
crescere. All'instante t1 l'integrale avrà così accumulato un determinato valore. Nell'instante
successivo la tensione raggiunge il valore Vs . Si noti però che la corrente non ha ancora raggiunto il
valore desiderato e che nonostante diminuisca l'errore, l'integrale continua a crescere perché
aumentano i contributi positivi (l'integrale è un accumulo). Il che significa che nonostante il valore
comandato dal regolatore sia più alto, questo vale in realtà Vs e l'ingresso fornito alla macchina si
trova in saturazione.
La corrente desiderata continua a crescere perché si tratta di un transitorio in un circuito RL e la
condizione è quella per cui si comanda la tensione massima del sistema e la corrente tende
raggiungere il valore Icc . Quando ia supera ia*, all'integrale si sommano dei contributi negativi,
Appunti di Azionamenti Elettrici a cura di Damiano Zito
ciononostante la corrente continua a crescere almeno fino a che la tensione va* non scende fino al
valore Vs .
Van / R = Icc
ia *
t
Figura 42: Transitorio di corrente - circuito RL
Solo dall'istante t5 la corrente inizia a diminuire e con diverse oscillazioni e con tempi lunghi
raggiunge il valore di regime.
8.6. Anti-Windup
Il comportamento dovuto alla saturazione (di cui bisogna tenere conto) peggiora la dinamica del
sistema allungando i tempi di risposta. L'altro fenomeno indesiderato su cui è possibile intervenire è
quello dei picchi di corrente che sollecitano la macchina e il convertitore creando su quest'ultimo
notevoli problemi termici alla giunzione degli switch. Si interviene quindi “prevedendo” la
saturazione nel convertitore già nel sistema di controllo in modo che questo possa accorgersene
prima.
Figura 43: Schema di controllo con Anti-Windup
Il sistema di anti-windup ha un funzionamento molto semplice. In uscita il PI fornisce una tensione
vapresat la quale entra in uno schema a blocchi che è la riproduzione del convertitore (tiene conto della
saturazione). Il regolatore controlla la differenza tra vapresat e va*. Se la differenza fra queste due
grandezze è maggiore di zero allora tale quantità viene moltiplicata per un guadagno KAW per poi
Appunti di Azionamenti Elettrici a cura di Damiano Zito
andare a sottrarsi all'errore riducendolo. Il caso limite sarebbe errore nullo ma la presenza
dell'integrale garantirebbe un'uscita costante.
Quando la vapresat si trova in zona lineare la differenza tra le due tensioni è nulla quindi il feedback di
anti-windup non funziona tenendo la vapresat sempre al margine della zona lineare.
t
vapresat
Figura 44: Tensione al limite della saturazione grazie all'azione
dell'integrale
Facendo in questo modo si garantisce che l'integrale (visto dal regolatore) non entri nella zona di
lavoro in saturazione e si mantiene costante. Quando l'errore di corrente diventa nullo la vapresat può
iniziare a diminuire come mostrato in Figura 45. Come si può vedere - a parte una leggerissima
oscillazione - la corrente va subito a regime. L'integrale che vede il regolatore rimane costante tra t2
e t3.
ia*
ia
t
Integrale
∫
t
Vapresat = Va *
Vapresat
t
Figura 45: Azione dell'anti-windup
Appunti di Azionamenti Elettrici a cura di Damiano Zito
L'azione dell'anti-windup consente quindi di eliminare i picchi di corrente introdotti
precedentemente dalla saturazione.
9. Richiami di controlli automatici: Luogo delle
radici12
Per la trattazione di questo argomento il dominio di lavoro è quello della variabile s, quindi ci si
trova nel dominio di Laplace.
La struttura di una funzione di trasferimento più comune è la seguente:
m
k ' ∏ (s−z i )
i=1
n
F (s )=
, m< n .
(s− p i)
∏
i=1
Se si pone tale funzione in controreazione unitaria:
x*
Δe
y
F(s)
y
Figura 46: Controreazione unitaria della F(s)
m
k ' ∏ (s− z i )
si può ricavare la fdt W (s)=
i=1
n
m
chiamata appunto fdt in controreazione
(s− p i)+ ∏ ( s−z i )
∏
i=1
i =1
unitaria.
x*
W(s)
y
Figura 47: Fdt in controreazione unitaria,
detta fdt ad anello chiuso
Si noti che il numero di poli della fdt ad anello chiuso e ad anello aperto coincidono perché hanno il
grado massimo uguale al denominatore. Gli zeri poi sono identici.
Si definiscono:
12 Questo argomento viene introdotto per poter affrontare le esercitazioni numeriche e quindi la sintesi dei regolatori.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
•
n
m
i=1
i=1
Poli di W(s): ∏ ( s− p i)+ k ' ∏ (s−z i )=0 ;
n
•
m
Punti singolari di W(s): ∂ ∏ (s− p i)+k ' ∂ ∏ (s− z i) .
∂ s i=1
∂ s i=1
n
∏ ( s− pi )
Questi si calcolano isolando k': k ' =− i =1
m
sostituendo questa espressione della
(s− z i)
∏
i=1
m
n
n
n
definizione si ottiene: ∏ (s−z i ) ∂ ∏ (s− pi )−∏ (s− pi ) ∂ ∏ ( s− pi ) . Le soluzioni di
∂ s i =1
∂ s i =1
i=1
i =1
questa equazione vanno poi inserire nell'espressione di k' e solo i poli che forniscono una
soluzione reale sono punti singolari.
Si può dimostrare inoltre che il numero di punti singolari è sempre P.S.⩽(n+ m−1) .
9.1. Regole per il tracciamento del Luogo delle Radici (LdR)
1. Se le soluzioni dell'equazione del LdR è reale allora esiste un valore kì reale in grado di
soddisfare l'equazione, ne segue che l'asse reale del piano complesso appartiene al LdR.
2. Appartiene al luogo positivo ( k '⩾0 ) tutti i punti dell'asse reale tali da lasciare alla loro
destra una somma dispari di zeri e di poli di F(s), contati con la loro molteplicità.
Appartengono al luogo negativo tutti i punti rimanente.
3. Per il luogo negativo ( −∞< k ' < 0 ), con k' proveniente da −∞ :
a) un numero di rami pari ad m (quanti gli zeri) convergono dagli m zeri di F(s);
b) n – m rami vengono dall'infinito secondo asintoti opportuni;
c) per k' = 0 , n rami convergono verso gli n poli di F(s).
Per il luogo positivo ( o⩽k '<+∞ ), per k' che va da 0 verso +∞ :
d) n rami partono dagli n poli di F(s), ci cui m convergono verso gli m zeri di F(s);
e) n – m rami tendono ad ∞ secondo opportuni asintoti.
4. Si avrà sempre 1 asintoto, sia per il L.P che per il L.N. Gli asintoti hanno un centro comune
n
m
∑ pi −∑ z i
per il L.P e il L.N. s0 = i=0
i=0
n−m
Contando i contributi con la loro molteplicità.
a) Nel luogo positivo tali semirette formano angoli pari a
π+ 2 π h
+
ϕ =
( h=1, 2,... , n−m) ;
(n+ m)
Appunti di Azionamenti Elettrici a cura di Damiano Zito
b) nel luogo negativo formano angoli pari a ϕ =
2πh
( n−m)
(h=1, 2, ... , n−m) .
Non è detto che il centro coincida con un punto appartiene al LdR.
n-m=1
n-m=2
n-m=3
n-m=4
L
P
L
N
Figura 48: Asintoti del Luogo delle Radici
5. Se s* è un punto singolare del LdR con molteplicità pari a μ ( μ⩾2 )in tale punto
confluiscono 2μ rami del luogo, alternativamente convergenti e divergenti. Questi rami
tagliano il piano in 2μ “fette” uguali. Si il punto singolare coincide con un polo o uno zero
di F(s) con molteplicità >1, allora l'alternanza dei 2μ rami è un'alternanza di L.P e di L.N.
L'utilità del luogo delle radici è quella di far capire come varia la dinamica della funzione di
F (s)
trasferimento ad anello chiuso W (s)=
al variare di k'. La dinamica di W(s) dipende dai
1+ F ( s)
suoi poli, infatti la funzione del LdR è proprio l'equazione al denominatore.
10.Regolazione della corrente di armatura di un
motore a c.c.
In questo paragrafo la trattazione viene svolta per il caso di regolazione analogica.
FARE ESEMPIO CON MATAB
Appunti di Azionamenti Elettrici a cura di Damiano Zito
10.1. Compensazione del disturbo (Feed-Forward)
Figura 49: Controllo di armatura con anti-windup
La Figura 49 riassume il controllo di corrente dopo aver inserito il sistema di Anti-Windup discusso
in precedenza .
Fino ad ora le considerazioni sono state svolte in condizioni di rotore bloccato. In questo paragrafo
si analizza la macchina in rotazione per capire se si riesce ad ottenere la dinamica desiderata. Per
fare ciò si potrebbe studiare la funzione di trasferimento disturbo-uscita (definizione a pagina 18) o
affrontare il problema con una trattazione qualitativa, che è quella che segue.
Quando la macchina viene posta in rotazione, essa agisce fornendo una tensione che fa circolare
corrente.
Per via della rotazione si crea un errore e di conseguenza il regolatore di corrente agisce
aumentando la tensione di armatura. Il regolatore però non tiene conto del disturbo prodotto dalla
fem indotta, e comanda una tensione che in realtà poi diventa inferiore. L'errore che si viene a
creare dura quindi di più, con la conseguenza che si ha una rallentamento nella velocità di risposta,
fino a compensare il disturbo prodotto dalla fem indotta. A regime permanente l'errore nullo è
garantito dalla presenza dell'integrale.
Per aumentare la velocità di risposta si cerca di conoscere una stima della fem indotta nel
regolatore.
Il risultato è riportato in Figura 50. Si inserisce una stima della fem indotta tale per cui se e stimata =e
*
allora la tensione v 1=v 1 .
Per stimare e, se il flusso è costante, basta misurare la velocità e stimare il giusto guadagno Ke:
e stimata =K e ω r .
mis
È chiaro che questa sarà una stima affetta da errore. Se si suppone che la stima è del 90% (che è un
valore che si riesce a raggiungere), allora si scrive che:
*
e stimata =0,9⋅e , per cui la tensione v 1=v 1+ 0,1⋅e . Quindi il regolatore deve accumulare un errore
aggiuntivo (0,1 e) sempre per annullare l'errore a regime permanente. Ma in questo caso il valore da
accumulare è 10 volte più piccolo rispetto al caso senza compensazione.
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 50: Compensazione della fem indotta e
Si ricordi che tra le ipotesi che erano state fatte a pagina 31 si diceva di tenere conto del dead-time
degli interruttori che riduce il valore medio di tensione in uscita. Questo è un disturbo nella linearità
del comando di tensione, trascurabile per tensioni elevate, ma non per piccole tensioni. Vale tra 1%
± 2%.
Come per il caso della fem indotta si può compensare questo disturbo inserendo una v DT al
*
convertitore e una stima di essa da sommare a v 1 .
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 51: Schema di controllo di una macchina in cc con anello di corrente e di velocità
http://www.damianozito.org
47
Appunti di Azionamenti Elettrici a cura di Damiano Zito
10.2. Regolatore di corrente ad isteresi
ia*
va*
Kp = ∞
ia
Figura 52: Regolatore di corrente con guadagno infinito
Il regolatore di corrente ideale è sicuramente quello con un proporzionale a guadagno infinito, come
quello riportato in Figura 52.
Con questo guadagno il convertitore comanda la tensione in saturazione. Si può quindi pensare di
utilizzare un regolatore di corrente che ha lo stesso comportamento ed è mostrato in Figura 53.
va*
∆ia
Figura 53: Regolatore ideale di corrente
In pratica questo regolatore individua il segno dell'errore e quando questo è positivo comanda la
massima tensione possibile. Quando invece è negativo comanda la massima tensione negativa. Il
problema è il funzionamento per errore prossimo allo zero.
Il vantaggio presentato da questo convertitore è che rispetto a quello col PI presenta un transitorio
velocissimo e non vi è bisogno di generare la PWM proprio perché la tensione comandata è sempre
la massima positiva e/o negativa ed è la tensione con cui possono essere comandati gli switch.
Questi però hanno una frequenza di modulazione limitata.
Pertanto per evitare anche il problema dell'errore vicino allo zero, si utilizza il regolatore ad
isteresi di Figura 54.
va*
∆ia
Figura 54: Regolatore di corrente ad isteresi
http://www.damianozito.org
48
Appunti di Azionamenti Elettrici a cura di Damiano Zito
La frequenza di modulazione in questo regolatore dipende dalla scelta di un parametro δ che
rappresenta una banda attorno alla corrente desiderata, come si osserva nella Figura 55 . Si nota poi
che in base al segno dell'errore la tensione comandata cambia il proprio segno.
Naturalmente tanto più è alto è il coefficiente δ tanto meno frequenti sono le commutazioni. Con
un'opportuna scelta di questo parametro la frequenza può essere uguale a quella che si avrebbe nel
caso di regolatore col PI. A regime permanente i due convertitori hanno lo stesso comportamento
dal punto di vista delle perdite.
Lo stesso non si può dire per il transitorio (Figura 56) durante il quale sono frequenti le
commutazioni.
δ
ia
ia*
t
va*
t
Figura 55: Funzionamento del regolatore ad isteresi
In conclusione si può dire che il regolatore ad isteresi è:
– il regolatore più veloce e permette alte prestazioni e a regime permanente ha le stesse perdite
di un regolatore PI;
– durante il transitorio (la f non è costante) non garantisce il pieno controllo delle perdite sul
convertitore che quindi va sovradimensionato.
http://www.damianozito.org
49
Appunti di Azionamenti Elettrici a cura di Damiano Zito
i
t
Figura 56: Transitorio di corrente nel regolatore ad
isteresi
11. Schemi di controllo per azionamenti in c.c.
Figura 57: Schema di controllo generico per una macchina in cc
In questo schema di controllo13 si individua facilmente il circuito di armatura, alimentato dalla
13
Il contenuto di questo paragrafo fa riferimento al testo “Control of Electric Drives – W. Leonard (Springer) [3rd Edition]”. Le
convenzioni circuitali (e simboli) sono quelle tedesche.
http://www.damianozito.org
50
Appunti di Azionamenti Elettrici a cura di Damiano Zito
tensione ua, con resistenza e induttanza e quindi il sistema collettore-spazzole che fornisce la fem e.
Si individua anche il circuito di eccitazione, alimentato da ue ,nel quale scorre la corrente ie che
produce il flusso di eccitazione φe . Nel circuito sono presenti due convertitori, uno per il circuito di
eccitazione e uno per quello di armatura, dotati di un sistema di controllo che misura la velocità
angolare, la corrente e la posizione angolare. Questo sistema di controllo può effettuare una
regolazione o sul circuito di armatura o su quello di eccitazione.
Lo schema seguente, in Figura 58, invece agisce solo circuito di armatura variando la tensione di
quest'ultimo. Il circuito di eccitazione rimane perciò costante.
Si analizza lo schema facendo riferimento anche a quanto già studiato.
Figura 58: Schema di controllo del circuito di armatura
Si parte dal blocco convertitore indicato con il termine “Actuators”. L'alimentazione di quest'ultimo
è di tipo continua se si tratta di un ponte ad “H” o alternata nel caso di un ponte raddrizzatore.
Nel convertitore entra naturalmente la tensione di riferimento ua*. Per la misura della posizione
angolare si utilizza un encoder. Si può notare come lo schema sia analogo a quello in Figura 51. I
due schemi differiscono solo per il blocco Reference Generator di cui si discute nelle prossime
pagine e che consente un azionamento con prestazioni migliori.
http://www.damianozito.org
51
Appunti di Azionamenti Elettrici a cura di Damiano Zito
ε*
ε
t
ω
t
dω/dt
t
Figura 59: Profilo ad esse
11.1. Generazione dei riferimenti e chattering del sistema
Il blocco di generazione dei riferimenti ha una funzionalità molto importante. L'obiettivo nel
controllo è quello di ottenere il cosiddetto “profilo ad esse” per la posizione angolare, che tradotto
vuol dire far partire la macchina a velocità nulla e arrivare alla posizione desiderata sempre a
velocità nulla. Che significa ancora accelerazione costante positiva per il primo tratto e
accelerazione costante negativa nel secondo.
Per fare ciò è necessario che l'errore di posizione cresca linearmente e decresca linearmente, come
mostrato in Figura 59.
La precisione di regolazione viene stabilita dal guadagno che viene dato nel regolatore di posizione.
Aumentandolo si riesce a soddisfare le specifiche richieste dal controllo.
ε
* ε
ε
* ε
Guadagno più basso
Guadagno più alto
Figura 60: Profilo ad esse al variare del guadagno
http://www.damianozito.org
52
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Il guadagno alto però può comportare due svantaggi. Il primo è la saturazione sulla velocità e l'altro
è dovuto al fatto che basta un piccolo errore per avere una variazione di velocità diversa da zero.
Ciò comporta delle oscillazioni ad alta frequenza in condizioni di regime permanente per cui il
sistema vibrerà attorno a quella posizione.
Questo fenomeno va sotto il nome di chattering.
ε
* ε
Figura 61: Chattering della macchina in cc
Per ovviare a questo problema, poiché si conosce il profilo di velocità che si vuole ottenere per
inseguire ε* allora si può pensare di effettuare il feed-forward al regolatore di velocità.
Il vantaggio principale dello schema in Figura 58 è rappresentato dal fatto che poiché al regolatore
viene dato un profilo di velocità desiderato, è possibile portare la macchina in una determinata
posizione seguendo il profilo ad esse, anche se l'errore è nullo. Naturalmente il regolatore di
velocità deve avere banda passante maggiore del regolatore di posizione in accordo con quanto già
studiato. La controreazione serve comunque per compensare le piccole variazioni che possono
derivare da effetti del secondo ordine trascurato, o dall'inerzia del sistema.
Si noti infine che nel blocco di generazione dei riferimenti viene anche creato il profilo
accelerazione che è un profilo di coppia accelerante il quale viene utilizzato per effettuare il feedforward di corrente, senza aspettare che l'accelerazione venga calcolata.
11.2. Schemi di controllo per la regolazione della velocità tramite
circuito di eccitazione
Gli schemi di controllo visti nel paragrafo precedente prevedono la regolazione della velocità solo
variando la tensione del circuito di armatura della macchina in cc. Si vedranno in questo capitolo
schemi di controllo che prevedono la regolazione della velocità variando l'eccitazione della
macchina.
http://www.damianozito.org
53
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 62: Schema di controllo della macchina a cc con eccitazione costante espressa in PU
In questo schema l'eccitazione è costante ma le grandezze sono espresse in per unità (PU), si nota
principalmente che la coppia e la corrente hanno stesso valore, dividendo quindi per l'inerzia della
macchina si ottiene facilmente la velocità di rotazione.
Risolvendo l'anello di corrente (Current Control Loop), creando così una funzione ad anello chiuso
(chiamata Wi(s) in precedenza), si arriva allo schema:
Figura 63: Anello di velocità in PU
http://www.damianozito.org
54
Appunti di Azionamenti Elettrici a cura di Damiano Zito
In questo schema si nota la funzione di anti-windup svolta dalla corrente di riferimento attraverso il
blocco Limiter.
Per la sintesi del regolatore di velocità si utilizza il metodo dell'ottimo simmetrico rappresentato in
Figura 64. Non viene qui approfondito.
Figura 64: Metodo dell'ottimo simmetrico
http://www.damianozito.org
55
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 65: Controllo della macchina in cc con variazione dell'eccitazione
La regolazione sul circuito di eccitazione è introdotta dallo schema in Figura 65, sempre in PU:
Nella parte superiore dello schema si trova la tensione del circuito di armatura, cui viene sottratta la
e , si passa per la fdt dell'armatura per ottenere la corrente che moltiplicata per il flusso determina la
coppia, cui va sottratta quella di carico ed infine si ottiene la velocità di rotazione.
Il flusso di eccitazione viene determinato dalle equazioni del circuito di eccitazione.
I convertitori in questo caso sono due, rappresentati con un guadagno ed una costante di tempo (Gas,
tas) e (Ges, tes).
È assodato quindi che per la regolazione della velocità della macchina in cc il controllo avviene sia
regolando la tensione di armatura, sia agendo sul flusso di eccitazione (regolazione di campo) come
visto a pagina 11. Il problema che si pone è quello di far interagire entrambe le strategie.
In un primo momento si effettua la regolazione aumentando la tensione del circuito di armatura e
poi questa deve essere mantenuta costante, il che significa mantenere la fem indotta anch'essa
costante: e=ω⋅ϕ . Questa relazione dice che il flusso è inversamente proporzionale alla velocità.
All'aumentare di quest'ultima diminuisce il flusso.
http://www.damianozito.org
56
Appunti di Azionamenti Elettrici a cura di Damiano Zito
V
E
E0max
ωn
Figura 66: Profilo di tensione della macchina in cc
Per capire quindi quando utilizzare la prima o la seconda strategia bisogna controllare la fem
indotta. Ai fini del controllo è utile conoscere esclusivamente il modulo.
Si osservi la Figura 66 e si supponga di trovarsi alla velocità nominale. Il valore di E0max è il valore
di riferimento che viene utilizzato nell'anello di regolazione del circuito di eccitazione. Se da questa
posizione la velocità aumenta, l'anello superiore tenderebbe a far aumentare la tensione e quindi la
fem indotta. Il regolatore di eccitazione se ne accorge (errore negativo), mantiene il valore di
riferimento e per fare ciò diminuisce il valore di ee , di conseguenza anche la corrente ed il flusso. Si
raggiunge così l'obiettivo di mantenere e costante per aumenti di velocità maggiori a quella
nominale. Si parla di deflussaggio.
Se a partire da ωn la velocità decresce la fem indotta diminuisce, si crea un errore positivo e il
regolatore aumenta la tensione di riferimento perché cerca di far aumentare la fem nel circuito di
eccitazione. Ma il circuito di eccitazione è già alimentato a tensione di eccitazione nominale, la
quale fornisce la corrente di eccitazione nominale (non si vuole far variare la corrente quando
cambia la velocità) e a sua volta il flusso di eccitazione nominale. Si è già al limite massimo, quindi
il circuito di eccitazione lavora in questo campo in saturazione, per cui l'uscita del regolatore non
sale. E questo è l'obiettivo cercato nel progetto del regolatore di eccitazione.
Si riassume il funzionamento:
– ω < ωn il regolatore di eccitazione lavora in saturazione;
– ω > ωn il regolatore di armatura andrebbe in saturazione. In realtà si controlla il flusso in
modo da avere fem costante e quindi tensione di armatura richiesta costante (zona di
funzionamento con limite di tensione).
Come si stima la fem indotta14?
✗
Se il flusso di eccitazione è costante, si ricaverà dalla velocità;
✗
attraverso la corrente di eccitazione, con la condizione di conoscere il legame flussocorrente (curva di saturazione);
14 Non si misura sotto carico.
http://www.damianozito.org
57
Appunti di Azionamenti Elettrici a cura di Damiano Zito
✗
dalla relazione v a =Ra i a +e+ La
d ia
dt
In quest'ultima equazione la complicazione numerica risiede nella derivata della correte che ha
anche un certo ripple.
La regolazione della fem indotta è legata all'anello di regolazione della velocità e in particolare i
due anelli hanno una banda passante molto vicina che – come è noto – è anche molto lenta rispetto a
quella della corrente. L'anello di regolazione della fem vede la corrente a regime.
È possibile approssimare la fem con la relazione:
e≃v a−R a i a .
Dove:
•
la corrente è nota perché viene misurata;
•
la resistenza di armatura si riesce a stimarla molto bene;
•
per la tensione di armatura vige il problema che non vengono usati trasduttori di tensione
negli azionamenti, perché è difficile ricavare l'informazione utile essendo una tensione
PWM.
Per la tensione però è noto il duty-cycle, quindi la va*.
ia*
PI
va*
-
1
va
convertitore
Figura 67: Schema a blocchi PI e convertitore
Fino al limite per cui è possibile continuare ad approssimare il funzionamento del convertitore con
fdt unitaria, si ha un'informazione sulla tensione che è proprio la va* all'uscita del PI.
Il dead-time – si è già detto – non permette di considerare unitaria la fdt del convertitore.
Tuttavia si può notare che la regolazione accurata della fem indotta la si vuole per velocità elevate,
o comunque maggiori di ωn . Sotto la velocità nominale il regolatore di eccitazione è in saturazione.
Inoltre il dead-time è rilevante per basse velocità e per piccole tensioni di alimentazione è
trascurabile.
Trascurando la dinamica del regolatore di eccitazione, il risultato è quello di Figura 68. Questo
schema è valido nella sola zona di deflussaggio (flux weakining region). Sotto questa ipotesi la fem
indotta si può ritenere costante perché la mantiene tale il convertitore di armatura.
http://www.damianozito.org
58
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 68: Schema di controllo in zona di deflussaggio (semplificazione dell'anello di eccitazione)
Il flusso di eccitazione è legato direttamente alla velocità di rotazione. Quando questa – in modulo –
è inferiore alla ωn allora il flusso di eccitazione è quello nominale. Quando la velocità – sempre in
modulo – supera il valore di ωn allora il flusso decresce con l'inverso della velocità.
La non-linearità tra corrente e flusso non crea grossi problemi proprio perché il flusso è stato ridotto
(deflussaggio), quindi non si manifestano fenomeni di saturazione magnetica.
In queste condizioni l'azione dell'anello di eccitazione si riduce quindi al blocco del flusso legato
alla velocità di rotazione e a un disturbo nell'anello di corrente.
12. Frenatura rigenerativa
La frenatura rigenerativa si presenta utile nel caso di veicoli elettrici o nel recupero di energia in un
sistema che prevede un ciclo di lavoro con molte accelerazioni e decelerazioni.
Si suppone di avere un sistema che sta lavorando alla velocità ωiniz , a partire da questo valore la
velocità decresce linearmente. La coppia che bisogna fornire è costante, quindi lo è anche la
corrente ed è negativa perché la coppia è frenante. In figura viene rappresentato l'andamento delle
grandezze di interesse.
Si nota che in un certo istante la tensione di armatura è zero, questa condizione si verifica quando:
K E ω=R a I R .
Per continuare a frenare da questo punto in poi bisogna imporre una tensione di alimentazione
negativa. Ciò è possibile utilizzando un convertitore che consente il funzionamento per corrente
negativa come il full-bridge. Per annullare la velocità si dovrà verificare:
V (t z )=Ra I R .
http://www.damianozito.org
59
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Il che significa che l'azionamento deve fornire l'energia necessaria per vincere la resistenza interna
del motore.
Figura 69: Frenatura rigenerativa, profili delle grandezze
L'energia disponibile per la frenatura rigenerativa fornita dal motore all'azionamento, e si calcola
http://www.damianozito.org
60
Appunti di Azionamenti Elettrici a cura di Damiano Zito
t0
come E R=∫ v a (t) i a (t )dt .
0
Dall'istante iniziale fino a t0 la potenza meccanica viene convertita in potenza elettrica.
Se ωiniz è la velocità iniziale, l'energia rigenerativa – svolgendo l'integrale - ha l'espressione:
(
)
J ωiniz ωiniz K e I 2a R 2a
E R=−
⋅
+ Ra I a .
Kt
2
2 ωiniz K e
Se si dispone di un pacco batterie è possibile accumulare l'energia. Allo stato dell'arte però l'energia
recuperabile è al massimo il 20% per via del fatto che la reazione delle celle è molto lenta rispetto
alla frenatura (non riuscendo a convertire elettrica in chimica) con l'implicazione che la maggior
parte dell'energia viene dissipata in calore nelle batterie.
Inoltre se si ha un full-bridge alimentato da un ponte a diodi che crea il link in continua. L'energia
che viene recuperata, dal motore passa attraverso il convertitore tendendo a tornare indietro ma
questa viene bloccata dal ponte a diodi. Viene quindi immagazzinata nella capacità C. Bisogna
perciò dimensionare correttamente il condensatore per evitare la massima tensione distrugga il
dielettrico:
∣
C⩾
−2 E R
V −V 2link
2
max
∣
Per questo motivo ci sono schemi che prevedono una resistenza di frenatura in parallelo rispetto al
link in continua messa in funzione da uno switch. Quando la tensione è troppo alta viene chiuso
l'interruttore per far scaricare il condensatore sulla resistenza. Si dissipa così una parte di potenza
per mantenere la tensione entro limiti accettabili.
ER
DC
Motor
Figura 70: Schema di principio della macchina in cc con recupero di energia
http://www.damianozito.org
61
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Azionamenti Brushless
1. Classificazione
Figura 71: Classificazione delle macchine a magneti permanenti PM e rispettivi azionamenti
Le macchine brushless fanno riferimento alle macchine sincrone. Lo studio delle macchine
elettriche vede l'utilizzo di queste macchine solo come generatori (line start). Grazie però
all'introduzione dell'elettronica di potenza è possibile con un convertitore alimentare a frequenza
variabile la macchine e farla funzionare da motore (inverter fed).
Il primo vantaggio che deriva da una macchina brushless è nell'ingombro. Infatti il rotore non va
alimentato (quindi è esente da perdite) poiché su di esso vengono posizionati dei magneti. In questo
modo si elimina del tutto il sistema collettore-spazzole. La macchina brushless è quindi più
compatta e permette un'elevata induzione al traferro.
Per poter azionare la macchina a frequenza variabile bisogna poter conoscere la posizione angolare
piuttosto che la velocità. Il feedback di θ iene utilizzato per l'alimentazione e appunto per la
regolazione di ω .
Il rotore di una macchina sincrona può presentare una gabbia che viene sfruttata per l'avviamento
cosiddetto “da asincrono”. Infatti quando la macchina viene avviata il campo statorico si concatena
col rotore inducendo delle tensioni e quindi delle correnti. Il risultato è quello di un coppia di
avviamento come nelle macchine a induzione. Quando la velocità di rotazione uguaglia quella del
campo (sincronismo) non si presentano fem indotte ed è come se la gabbia non ci fosse. È chiaro
http://www.damianozito.org
62
Appunti di Azionamenti Elettrici a cura di Damiano Zito
quindi che questo tipo di macchine lavorano sempre alla stessa velocità. Questo tipo di
funzionamento nello studio degli azionamenti è di scarso interesse perché non è possibile effettuare
una regolazione della velocità di rotazione.
Esistono quindi le macchine senza gabbia (cageless) che si differenziano in DC brushless e AC
brushless per via del tipo di alimentazione in corrente, il quale può essere nel primo caso di tipo
rettangolare e sinusoidale nel secondo.
Questa alimentazione dipende dagli aspetti costruttivi della macchina e dal tipo di fem indotta
(trapezoidale o sinusoidale).
In entrambi i casi bisogna sempre poter conoscere la posizione angolare. I metodi utilizzati sono
quelli con dei sensori opportunamente posizionati o l'utilizzo di algoritmi cosiddetti “sensorless”
ancora oggetto di studio nella ricerca.
1.1.
Macchina SPM
La macchina SPM (Surface Permanent Magnet) si presenta come quella in Figura 72. La prima
caratteristica di questa macchina che si riesce ad apprezzare è l'isotropia. Infatti qualunque sia la
linea di flusso presa in considerazione l'induttanza è sempre la stessa. Si noti ancora che la presenza
dei magneti permanenti (PM) implica che la linea di flusso incontra un'elevata riluttanza. Quella dei
PM è infatti confrontabile con quella dell'aria.
Figura 72: Struttura di una macchina SPM
Il traferro che incontra la linea di flusso è elevato. Tutto ciò sta a significare che qualora si voglia
eguagliare il flusso di eccitazione dovuto ai magneti, la corrente richiesta sarà elevata, è richiesta –
cioè – una elevata forza magneto-motrice.
Uno svantaggio di questa macchina è dovuto al fatto che, mentre si trova in rotazione, se il circuito
di statore va in corto-circuito, allora il flusso dei PM induce delle fem nello statore producendo la
http://www.damianozito.org
63
Appunti di Azionamenti Elettrici a cura di Damiano Zito
corrente di corto-circuito e quindi un flusso che si oppone alla causa ( λ PM ) col pericolo di
smagnetizzare i magneti.
1.2.
Macchina IPM
La macchina IPM (Interior Mounted Magnet) si presenta come in Figura 73. Sicuramente è
anisotropa quindi presenta zone a bassa e ad alta riluttanza. Esistono quindi delle linee preferenziali
per il flusso. L'anisotropia della macchina viene sfruttata per aumentare la coppia disponibile, con
lo svantaggio di aumentare il ripple di coppia. Rispetto alla macchina SPM presenta un traferro
minore (minore induttanza) e quindi a parità di caratteristiche richiede meno magneti per ottenere la
stessa induzione al traferro. Presenta come la SPM lo svantaggio di poter smagnetizzare i magneti
ma è più robusta, complice parte del giogo rotorico che li mantiene. Nel caso della SPM infatti
questi vengono “incollati” con conseguente possibilità che questo ancoraggio si deteriori per via
dell'aumento di temperatura. In sede di scelta vanno tenute presenti queste considerazioni.
Figura 73: Struttura di una macchina IPM
1.3.
Macchina IM
La macchina IM (Inset Mounted) presenta dei magneti innestati in apposite cave sul rotore. Si
presenta come in Figura 74.
http://www.damianozito.org
64
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 74: Struttura di una macchina IM
2. DC Brushless
Una macchina SPM è alimentata con correnti di tipo rettangolare. Si dimostra tale asserzione. È
facile infatti vedere come il campo rimanga “piatto” per un certo intervallo al passaggio di esso
sotto una bobina. Si analizza la macchina già descritta considerando il solo avvolgimento della fase
A con 3 bobine a1, a2, a3.
Figura 75: Macchina DC Brushless
Immaginando di porre in rotazione il rotore si vede l'andamento del campo magnetico in funzione
della posizione angolare15. Noto l'andamento del campo è possibile individuare il flusso che si
concatena con le bobine.
L'andamento di quest'ultimo è lineare da un massimo positivo verso un massimo negativo.
dΨ
, ricordando però in seguito
dt
che questa formula in realtà presenta un segno negativo. Il flusso concatenato e quindi la fem su
È possibile così determinare l'andamento della fem indotta: e=
15 L'istante iniziale di riferimento è per
θ=90°
.
http://www.damianozito.org
65
Appunti di Azionamenti Elettrici a cura di Damiano Zito
ogni bobina è sfasato di 30° gradi. In particolare la bobina 3 rispetto alla 1 si trova in anticipo di 30°
mentre la 2 in ritardo sempre di 30°. Le bobine di un avvolgimento – infatti – essendo la macchina
trifase non possono occupare più 60°.
Figura 76: Analisi delle grandezze della macchina DC Brushless
L'andamento che si ottiene per la fem non è proprio trapezoidale perché si sta considerando un
numero esiguo di bobine. Nella realtà si tratta di un andamento trapezoidale così come si vede in
Figura 77.
Il valore massimo della tensione si ricava facilmente dal flusso: ΨMAX =N B g π r l :
Ψ(θ)= 1− θ Ψ MAX . Per cui la fem indotta vale:
π/ 2
(
)
http://www.damianozito.org
66
Appunti di Azionamenti Elettrici a cura di Damiano Zito
E ph=2 N ph B g l r ω .
Dove l è la lunghezza assiale, r il raggio al traferro.
ea , eb , ec
ia , ib , ic
Eph
Iph
π
2π
θe
θe
θe
Figura 77: Profilo di tensioni e di correnti per le 3 fasi della macchina dc brushless
http://www.damianozito.org
67
Appunti di Azionamenti Elettrici a cura di Damiano Zito
3. Azionamenti DC Brushless: modello matematico
Equazioni del circuito di statore:
3 equazioni di statore in forma vettoriale
In linea generale si può scrivere che per una fase vale la relazione:
V a =R i+
d λ tot , a
;
dt
λ tot , a indica tutti i flussi concatenati con lo statore. L'equazione può essere anche formulata:
V a =R i a +
d λs , a d λr , a
.
+
dt
dt
⏟
e a , fem indotta
Scrivendo l'equazione di cui sopra si sta facendo l'ipotesi di linearità per cui è possibile applicare il
principio di sovrapposizione degli effetti.
Se si suppone che la macchina sia anche simmetrica allora le induttanze saranno:
L a=L b=L c= L ; L ab=Lac =L bc=M .
Poiché la macchina è isotropa la matrice delle induttanze si può ritenere costante al variare della
posizione angolare.
Facendo le opportune considerazioni si arriva a .
Il modello si completa con l'equazione meccanica. L'equilibrio meccanico è sempre espresso da:
d ωr
J
=T em −T L− B ωr .
dt
http://www.damianozito.org
68
Appunti di Azionamenti Elettrici a cura di Damiano Zito
P
La coppia elettromagnetica può essere espressa come T em = ωem , dove la potenza. elettromagnetica
r
è a sua volta data dal prodotto P em= E I a . La tensione E in questo caso è trifase:
T em =
(e a i a + e b i b + ec i c )
.
ωr
Si dimostrerà adesso che tale coppia vale:
I
T em =2 E ph ωphr .
Si guardi a tal proposito la Figura 77, dove il profilo di correnti è tale da essere nullo per variazioni
di tensione. Analizzando per qualsiasi angolo θ i profili tensione-corrente di tutte e 3 le fasi, la
potenza elettromagnetica vale sempre:
P em=2 E p I ph .
Quindi la coppia si può esprimere come:
T em =
2 E ph I ph
2E I
, e più in generale T em = p ωph ph per tenere conto delle p coppie polari.
ωr
r
E
Il rapporto ωph =λ ph è il flusso generato dai magneti permanenti, quindi costante, concatenato con
R
lo statore.
Infine si può scrivere l'espressione
T em =K T I ph ,
analoga a quella vista per la macchina in corrente continua.
Dalla figura appena analizzata si nota che istantaneamente sono in conduzione solo 2 fasi e tale
situazione permane per 60°elettrici. È chiaro quindi che per realizzare il profilo di corrente
desiderato bisogna conoscere la posizione angolare. Questa informazione viene ricavata tramite
sensori ad effetto-hall che rilevano la polarità del campo (Nord-Sud).
In Figura 78 si riporta un disegno qualitativo della macchina con 3 trasduttori appositamente
collocati per rilevare il campo. Sono distanziati tra loro a 120°.
Il segnale fornito da un trasduttore è alto quanto si trova sotto l'influenza del campo prodotto dal
polo Nord, basso quando è sotto l'influenza del campo dovuto al polo Sud.
Come si può vedere dall'output dei trasduttori in Figura 79, ogni 60° c'è una variazione.
http://www.damianozito.org
69
Appunti di Azionamenti Elettrici a cura di Damiano Zito
H1
N
S
H2
H3
Figura 78: DC Brushless, Posizionamento sensori di
campo
H1, H2, H3
θe
2π
Figura 79: Segnale in uscita dal trasduttore di campo
http://www.damianozito.org
70
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Questa analisi serve a poter individuare almeno il settore in cui si trova la macchina, per questo
motivo si realizza una tabella di stati associati allo stato dei trasduttori. Per cui:
H1
H2
H3
Ia
Ib
Ic
Switch ON
1
1
0
Iph
- Iph
0
1,6
0
1
0
Iph
0
- Iph
1,2
0
1
1
0
Iph
- Iph
3,2
0
0
1
- Iph
Iph
0
3,4
1
0
1
- Iph
0
Iph
5,4
1
0
0
0
- Iph
Iph
5,6
0
0
0
-
-
-
-
1
1
1
-
-
-
-
Tabella 1: Segnali logici dei trasduttori associati. Correnti associate. Sequenza interruttori
Nella tabella si nota che vengono così utilizzati 6 gruppi di stati logici coi quali si vanno a
comandare gli switch del circuito di potenza della macchina. Gli ultimi due stati servono per
segnalare stati di malfunzionamento del trasduttore.
Figura 80: Inverter e circuito equivalente della
macchina DC Brushless
In prima approssimazione si può considerare l'inverter a corrente impressa. Sotto questa ipotesi si
nota che per ogni coppia di interruttori in ON la somma delle correnti vale sempre Iph. L'inverter
però è a tensione impressa non in corrente, quindi non si riesce a controllare quest'ultima solo
chiudendo la coppia di interruttori.
http://www.damianozito.org
71
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Si analizzi il caso per cui la coppia di switch accesa è 1,6.
(
)
d ia
di
di
+ e a− R i b +( L−M ) b +e b =2 R i a +2(L−M ) a +2 E ph , per cui
dt
dt
dt
trascurando il transitorio, si ricava la corrente a regime permanente:
v ab=Vdc=R i a +( L−M )
I a=
V dc −2 E ph
= I ph .
2R
Essendo E ph costante, R anch'essa costante, è chiaro che l'unico modo per poter controllare la
corrente ed ottenere l'andamento desiderato è quello di controllare la tensione v ab . A questo punto
v ab≠V dc perché viene modulata. Per effetto della modulazione la corrente presenterà quindi un
ripple e se la f PWM è molto elevata l'inerzia del sistema filtra tale contenuto.
4. Azionamenti DC Brushless: Schemi di
controllo
Quando una coppia di interruttori è in conduzione le due fasi rispettive sono praticamente collegate
in serie. Si sceglie quindi di modulare solo uno dei due interruttori in ON risparmiando in termini
economici e di perdite energetiche. Normalmente si modulano gli interruttori 4, 6, 2 che si trovano
nel lato inferiore.
Lo schema di controllo quindi si presenta come quello in figura.
Figura 81: Schema di controllo per la macchina DC Brushless
Si può però effettuare un accorgimento e pensare di misurare direttamente la I dc e confrontarla con
il valore desiderato I ph nel controllo per effettuare il duty-cycle. Si realizza di fatto un inverter a
corrente impressa e si risparmino due sensori di corrente utilizzati nello schema precedente.
http://www.damianozito.org
72
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 82: Schema di controllo per la macchina DC Brushless semplificato
Lo schema è quello in Figura 82. In questo caso attraverso un'operazione di AND si definiscono dei
segnali S2, S4, S6, dei rispettivi switch dopo aver generato un duty-cycle che esce dal blocco PWM.
Tali segnali contengono il comando di commutazione degli interruttori. I tre switch superiori
T1,T3,T5, vengono invece comandati dalle tre sonde ad effetto-hall.
4.1. Limiti degli azionamenti DC Brushless
Per via della modulazione l'andamento reale della corrente cambia presentando un transitorio e un
certo ripple. Tutto ciò comporta delle perdite di potenza.
Tali diminuzioni di potenza provocano una diminuzione di coppia. In sostanza durante i tempi di
apertura e chiusura degli switch vi è una coppia minore, si creano perciò degli impulsi
Per questo motivo negli azionamenti DC Brushless non ci si aspetta una regolazione fine della
velocità. Inoltre poiché negli schemi appena visti non è previsto un trasduttore di velocità è chiaro
che l'azionamento non è praticabile per basse velocità.
http://www.damianozito.org
73
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Eph
Iph
ea , eb
ia , i b
Figura 83: Transitorio in presenza di
modulazione nella macchina DC Brushless
Si è visto inizialmente che la potenza elettromagnetica vale sempre P em=2 E ph I ph .
Per la sola fase a ci si aspetta P em , a=E ph I ph . In realtà poiché la corrente presenta un certo
transitorio prima di andare a zero si ha:
e a=( E ph−Δ E ) .
Dal dettaglio mostrato in figura si ricava:
e a i a + eb i b=(E ph −Δ E )i a + E ph i b=E ph (i a +i b )−Δ E i a , ovvero:
P em= E ph I ph −Δ
E ia .
⏟
perdita
La coppia si presenterà come in Figura 84.
Tem*
Tem
2π
Figura 84: Profilo di coppia della macchina DC Brushless
http://www.damianozito.org
74
Appunti di Azionamenti Elettrici a cura di Damiano Zito
5. Trasformazioni di coordinate: il sistema di
riferimento arbitrario
Qui ci va il sistema di riferimenti arbitrario.16
6. Trasformazioni di coordinate: il vettore rotante
E qui la teoria del vettore rotante.
7. Macchina Sincrona a Poli Salienti
Oggetto di questa sezione è lo studio della matrice delle induttanze della macchina sincrona a poli
salienti. In particolare si mette in evidenza la dipendenza della posizione angolare da parte
dell'induttanza (2 periodi in un periodo elettrico, perché è sensibile alla dimensione del traferro e
non alla polarità del campo).
I flussi della macchina si esprimono come:
[ ][
Laa
λa
λ b = Lba
λc
Lca
Lab
Lbb
Lcb
][ ]
Lac i a
Lbc i ab .
Lcc i c
L'induttanza legata alle linee di flusso che si concatenano tra statore e rotore vale:
L aa=Lls + [ L A− L B cos 2 θ r ] ;
[
[
]
]
2
L bb=Lls + L A−L B cos 2(θ r− π) ;
3
2
L bb=Lls + L A−L B cos 2(θ r− π)
3
.
17
Questo perché per la fase B la riluttanza è massima quando il rotore ruota di
quando ruota di
2
π , e per la fase C
3
4
π.
3
Si cerca l'espressione delle altre induttanze secondarie. È chiaro che queste non avranno un termine
di dispersione ma di solo accoppiamento.
Si pensi di avere inizialmente una macchina a rotore liscio: in questa situazione l'induttanza M non
avrà un valore massimo o uno medio perché il traferro è costante. Quindi la mutua induzione dovuta
alla corrente che circola nella fase A e che si concatena con la fase B vale:
16 Appendice
17 Per approfondire la determinazione di tali induttanze consultare il libro “Krause - Analysis of Electric Machinery and Drive
System (IEEE)”
http://www.damianozito.org
75
Appunti di Azionamenti Elettrici a cura di Damiano Zito
2
1
M =−L A cos π=− L A .
3
2
Allo stesso modo l'induttanza dovuta alla corrente che circola nella fase B e che si concatena con la
1
fase A vale sempre M =− L A .
2
Se il rotore è a poli salienti il flusso varia da un valore minimo ad uno massimo perché varia la
riluttanza con l'angolo θr . Si può verificare che:
1
Lba =− L A−L B cos 2(θ r− π ) ;
2
3
Lab =Lba ;
1
L ac=− L A−L B cos 2(θ r + π ) ;
2
3
Lca = Lac ;
1
L bc=− L A−L B cos 2(θ r + π) ;
2
Lcb =L bc .
Si può a questo punto andare a capire cosa succede alla matrice delle induttanze (fortemente
dipendente dall'angolo di rotazione) quando viene effettuata una trasformazione di coordinate.
λ abc = Labc⋅i abc , quindi si ha che λ qdo =K Labc K −1 i qdo , dove Lqd0 = K L abc K −1 è la matrice
diagonalizzata per via della trasformazione delle coordinate.
Figura 85: Macchina Trifase a Poli
salienti
Si sceglie un sistema di riferimento per cui questo ruoti alla stessa velocità rotorica ωr per p coppie
di poli , per cui l'asse d è allineato con l'asse di rotore e q è ortogonale ad esso. L'allineamento si
mantiene per tutte le posizioni angolari. Quindi un flusso lungo l'asse d o q troverà sempre la stessa
riluttanza e di conseguenza la matrice delle induttanze non sarà più funzione della posizione
angolare. La condizione iniziale impone poi che lungo l'asse d ci sia l'induttanza massima. La
matrice ha la seguente forma:
http://www.damianozito.org
76
Appunti di Azionamenti Elettrici a cura di Damiano Zito
[
]
( Lls + L mq)
0
0
Lqdo =
0
( L ls + L md )
0 .
0
0
( Lls )
Dove si può ricavare:
3
L mq= ( L A− LB ) ;
2
3
L md = ( L A + L B ) e cioè L md > Lmq .
2
Si noti che la matrice, in questo caso, presenta degli elementi che non dipendono dalla posizione
angolare per via della scelta effettuata, per cui d ruota con la velocità del rotore.
In linea del tutto generale quindi sulla diagonale si hanno elementi che dipendono da θ
8. Macchina Sincrona a Magneti Permanenti IPM
La macchina IPM è anisotropa al contrario di una SPM che invece rimane isotropa.
La forma della matrice delle induttanze rimane uguale, cambia però la formulazione delle
induttanze.
Se si analizza l'andamento dell'induttanza (riluttanza) rispetto al caso precedente si nota come nella
macchina IPM l'induttanza nel periodo elettrico segua lo stesso andamento ma invertito. Per cui si
ha che:
L aa=Lls + [ L A + L B cos 2θ r ] ;
[
[
]
]
2
Lbb= Lls + L A + L B cos 2(θ r− π) ;
3
2
Lbb= Lls + L A + L B cos 2(θ r− π) .
3
Per quanto riguarda invece le induttanze secondarie si ottiene invece:
1
L ba=− L A + L B cos 2(θ r− π ) .
2
3
Si effettua adesso la trasformazione di coordinate imponendo la stessa condizione iniziale.
la situazione si inverte rispetto al caso di una macchina sincrona a poli salienti e si ottiene:
3
L mq= ( L A + L B ) ;
2
[
Lq
La matrice Lqdo = 0
0
3
L md = ( L A− L B) e cioè L mq> Lmd .
2
0
Ld
0
]
0
0 .
L0
Dove:
http://www.damianozito.org
77
Appunti di Azionamenti Elettrici a cura di Damiano Zito
L q=Lls + L mq ;
L d =Lls + L md ;
L0 =Lls .
9. Azionamenti AC Brushless: modello
matematico
Per esaminare questo modello si fanno le seguenti ipotesi:
– Flusso sinusoidale prodotto dal rotore e concatenato con la statore che produce una fem
indotta cosinusoidale;
– linearità, si trascura la saturazione per applicare il principio di sovrapposizione degli
effetti;
– si trascurano le perdite per isteresi e correnti parassite;
– non si considerano eventuali gabbie rotoriche.
Si scrive quindi il modello matematico:
v abc =R abc i abc +
d λ abc
, dove
dt
λ abc =λ abc , s +λ abc , r =Labc I abc + λ abc , PM , dove ancora si ha:
λ abc , s è il flusso generato dallo statore e concatenato con lo statore;
λ abc , r è il flusso generato dal rotore e concatenato con lo statore.
Si applica quindi il principio di sovrapposizione degli effetti.
Il flusso λ abc , PM è dovuto appunto ai magneti permanenti e vale.
λ abc , PM =λ PM
[ ]
sin θ r
2
sin (θ r− π)
.
3
4
sin (θr − π)
3
Questa espressione significa che il flusso λ a concatenato con la fase A di statore e prodotto dai
magneti permanenti è nullo per θr =0 . E via dicendo per gli altri due flussi.
In particolare:
λ a=0 per θr =0 ;
http://www.damianozito.org
78
Appunti di Azionamenti Elettrici a cura di Damiano Zito
λ a=λ PM per θr =90 ° ;
λ a=0 per θr =π ;
λ a=−λ PM per θr =270° ;
λ a=0 per θr =2 π .
Il modello si completa con l'equazione meccanica:
d ωr
;
dt
T −T L =J
θr =∫ ω r dt +θ0 . Si noti che si stanno scrivendo le equazioni per p = 1.
A questo punto a partire dalla prima equazione del modello si può scrivere la potenza istantanea in
uscita dalla macchina:
T
T
T
i abc v abc =i abc Rabc i abc + i abc
d λ abc
. Dove il flusso λ abc è λ abc = f (θr , i abc ) . Per cui:
dt
∂ λ abc
∂ λ abc
d λ abc = ∂ θ d θr +
d i abc ,
∂ i abc
r
d λ abc ∂ λ abc d θ r ∂λ abc d i abc
. Sostituendo quanto ricavato nell'equazione delle potenze:
= ∂θ
+
dt
dt ∂ i abc dt
r
∂ λ abc d i abc T ∂ λ abc d θ r
.
+i abc ∂θ
∂ i abc dt ⏟
dt
r
⏟
T
T
i Tabc v abc =i⏟
abc Rabc i abc + i abc
p joule
Δ E magnetica al traferro
p em
A meno delle perdite meccaniche, si può scrivere che:
∂ λ d θr
d θr
. Essendo
T ωr = p em =i Tabc ∂ θabc
=ωr .
dt
dt
r
∂ λ abc
In definitiva vale: T =i Tabc
.
∂θ r
Volendo riassumere e generalizzare il modello per una macchina a p coppie di poli:
v abc =R abc i abc +
d λ abc
;
dt
λ abc =Labc (θ e ) i abc + λ PM
[ ]
sin θe
2
sin (θe − π)
;
3
4
sin (θe − π)
3
http://www.damianozito.org
79
Appunti di Azionamenti Elettrici a cura di Damiano Zito
T −T L =J
d ωr
∂λ abc
; T = p i Tabc
; θr =∫ ω r dt +θ0 ; θe = p θ r ; ωe = p ωr .
∂ θe
dt
Dalle equazioni appena scritte è possibile ricavare le correnti, i flussi, la coppia e la velocità (o
posizione angolare). Il sistema descritto è perciò ad 8 incognite e le equazioni sono mutuamente
accoppiate.
Si può pensare di effettuare una trasformazione di coordinate nel riferimento sincrono (velocità del
sistema pari a ωe ):
La prima equazione si scrive v qdo = Rqdo i qdo +
Per i flussi λ qdo =L qdo i abc + λ PM , qdo
d λ qdo
+ω e λ dq ;
dt
[
Lq
, con la matrice Lqdo = 0
0
0
Ld
0
]
0
0 . Bisogna considerare
L0
analizzare la forma dell'ultimo contributo di λ qpo .
Si effettua per λ PM una trasformazione a partire da grandezze di tipo sinusoidale:
{
f a= F sin ω t
2
f b=F sin (ω t− π) , per cui ci si aspetta
3
4
f c =F sin (ω t− π)
3
{
f q=0
.
f d= F
q
λq = 0
λd = λPM
d
Figura 86: Vettore rotante di λ PM
Ora si noti che la convenzione utilizzata per il vettore rotante di λ PM è la stessa che è stata
utilizzata per Lqdo . E cioè stessi riferimenti, stessa velocità di rotazione e stesse condizioni iniziali,
quindi l'equazione dei flussi si può riscrivere come:
http://www.damianozito.org
80
Appunti di Azionamenti Elettrici a cura di Damiano Zito
[ ]
0
λ qdo =L qdo i qdo + λ PM ,qdo = Lqdo i qdo + λ PM
0
.
Si cerca ora la forma della coppia nel riferimento qdo.
La potenza istantanea vale:
∂ λ qdo d i qdo 3 T
3 T
3
3
i qdo v qdo = i Tqdo R qdo i qdo + i Tqdo
+ i qdo ωe λ dq .
2
2
2
∂ i qdo dt ⏟
2
⏟
⏟
p joule
pem
Δ E magnetica al traferro
[ ]
λd
3 T
Quindi p em=T ω r = i qdo ωe λ dq , dove λ dq= −λq .
2
0
La coppia pertanto diventa T =
3 T
pi λ .
2 qdo dq
Riassumendo, il modello matematico nel riferimento qdo si completa con le equazioni:
{
d λ qdo
+ ω e λ dq
dt
0
.
λ qdo = Lqdo i qdo + λ PM
0
3
T = p i Tqdo λ dq
2
v qdo = Rqdo i qdo +
[ ]
Tali equazioni sono tutte equazioni costanti a regime permanenti e la matrice delle induttanze non
dipende da θ .
In forma scalare valgono:
{
d
λ +ω λ
dt q e d
d
v d =R i d + λ d −ω e λ q ;
dt
d
v 0=R i 0+ λ0
dt
v q=R i q +
{
λ q=L q i q
λ d =Ld i d +λ PM ;
λ 0=L0 i 0
T=
[ ]
λd
3
3
p [ i q i d i o ]⋅ −λ q = p [ λ d i q −λ q i d ] .
2
2
0
http://www.damianozito.org
81
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Come atteso la trasformazione ha disaccoppiato le equazioni (a parte il contributo ωe λ d e ωe λ q ) e
non c'è contributo omopolare nella coppia. In particolare si può fare ancora un'ulteriore
considerazione:
T=
3
3
p [ ( Ld i d +λ PM )i q−(Lq i q )i d ]=[ λ PM i q+ Ld i q −Lq i d i q ]= p λ
Ld − Lq )i d i q .
PM i q +(⏟
⏟
2
2
[
T Sincrona
T di Riluttanza
]
La forma della coppia è analoga a quella della macchina sincrona.
Si ricordi poi che:
3
Lq= Lls + ( L A +L B )
2
; L q> Ld . E quindi Lq ≠Ld per macchina anisotropa ( IPM ) .
3
Lq =Ld per macchina isotropa (SPM )
L d =Lls + ( L A− LB )
2
{
Si evince che nel caso di macchina SPM il contributo di coppia di riluttanza è nullo.
La coppia, come per la macchina in cc viene così controllata in corrente. Analizzando il caso di
macchina IPM per il quale vale l'espressione di cui sopra è chiaro che per avere coppia positiva,
poiché quella sincrona per essere >0 deve risultare i q >0 , appare evidente che la i d deve essere <0.
Nel controllo della macchina perciò l'obiettivo è individuare il vettore spaziale di corrente serve per
comandare la coppia desiderata.
Infine, un'ultima considerazione sulla fem indotta dovuta ai PM riscrivendo le prime due equazioni
in forma scalare:
{
d
λ +ω L i + ωe λ PM
dt q e d d
.
d
v d =R i d + λ d −ωe L q i q
dt
v q =R i q +
Il modulo della fem indotta dai magneti permanenti ( ωe λ PM ) è allineato all'asse q. Per via della
trasformazione inoltre appare un mutuo accoppiamento tra le fasi ed è rappresentato dai termini
ωe Ld i d e −ωe L q i q .
http://www.damianozito.org
82
Appunti di Azionamenti Elettrici a cura di Damiano Zito
q
e
a
λ PM
d
Figura 87: Flusso-corrente negli assi qdo
La fem come detto si trova sull'asse q e il flusso sull'asse diretto. Ciò è corretto se si pensa al fatto
che la fem è sempre in anticipo di 90° rispetto al flusso. Inoltre la fem è di tipo sinusoidale mentre il
flusso cosinusoidale perciò è altrettanto corretto trovare il vettore e sull'asse q quando si passa da
abc a qdo.
10.Azionamenti AC Brushless: Schemi di controllo
La strategia che viene applicata per il controllo degli azionamenti AC Brushless è sempre la MTPA
(Maximum Torque per Ampere), secondo la quale si riesce a fornire la coppia massima possibile con
le perdite minime.
Analizzando la coppia per una macchina SPM si è trovato che è proporzionale alla corrente:
T=
3
p λ PM i q =K T i q . L'espressione è analoga a quella vista per la macchina in cc.
2
Se quindi si vuole comandare una coppia desiderata T* verranno imposte le correnti:
{
*
T
i
KT .
*
i d =0
*
q
La componente lungo l'asse diretto poiché non contribuisce, nel caso di macchina SPM, a generare
http://www.damianozito.org
83
Appunti di Azionamenti Elettrici a cura di Damiano Zito
coppia, viene imposta a zero. Così facendo si ottiene il minor modulo possibile di corrente,
minimizzando appunto le perdite.
Questa condizione equivale ad imporre inoltre un vettore di corrente parallelo al vettore di fem
indotta dai PM, anch'esso diretto sull'asse q.
{
{
i a =I cos (ωe t)
e a =E cos (ω e t)
2
2
*
Sia la terna e b=E cos (ωe t− 3 π) , per un controllore ideale si ha i =i : i b= I cos( ωe t−3 π) .
4
4
e c =E cos( ωe t− π)
i c =I cos (ω e t− π)
3
3
3
La potenza P em=e a i a +e b i b +e c i c= EI cos ϕ=T ωr .
2
Dove E , I sono i valori di picco e non efficaci.
Dall'equazione della coppia si ricava perciò che per ϕ=0 la coppia è quella massima.
Si analizza il caso di una macchina IPM che generalizza la trattazione.
La coppia in questo caso si è visto valere: T =
3
p [ λ PM i q +( Ld −Lq )i d i q ] .
2
Per comandare la coppia desiderata bisogna imporre:
{
i q * >0
.
i d *<0
In questo caso la condizione che massimizza la coppia è: ∣MTPA∣=
∂T
=0 .
∂∣i∣
i*
q
*
id
φ
*
iq
θe
a
d
Figura 88: MTPA per macchina IPM
Si noti che il vettore delle correnti non sarà allineato con l'asse q ma sfasato rispetto ad esso di un
angolo ϕ .
Tale angolo sarà quello da imporre nello schema di controllo. Si svolgono quindi i passaggi per
http://www.damianozito.org
84
Appunti di Azionamenti Elettrici a cura di Damiano Zito
determinarlo:
i q *=I * cos ϕ* ;
i d *=I * sin ϕ * (< 0).
3
*
*
*
*
*
*
p [ λ PM I cos ϕ +( L d −L q )( I cosϕ )(−I sin ϕ ) ]
2
.
3
*
*
*2
*
*
T = p [ λ PM I cos ϕ +( Lq− Ld )( I cos ϕ sin ϕ ) ]
2
T=
∂T
=[ λ PM +( Lq− Ld )sin ϕ* 2 I * ]=0 18. Da cui si ricava:
∂I
ϕ*=arcsin
λ PM
λ PM
e ancora sin ϕ*=
.
*
2( Ld −Lq I )
2 ( L d −L q I *)
Nel riferimento abc quindi la corrente che si andrà a comandare sarà del tipo:
{
i *a =I * cos (θe +ϕ* )
2
i *b= I * cos(θ e + ϕ*− π) .
3
*
*
* 4
i c =I cos (θ e + ϕ − π)
3
*
*
Si noti che per i a =I cos (ωe t) significa che si sta comandando una corrente allineata con l'asse q e
che la velocità è costante come già visto per il controllo di coppia della SPM a regime permanente.
*
*
Nel regime variabile, sempre per SPM, si comanda i a =I cos (θe ) (perché ϕ=0 ) poiché non è
nota la velocità. Le due espressioni coincidono quando naturalmente ωe t=cost .
Questo tipo di controllo viene denominato controllo vettoriale. Il motivo risiede nel fatto che della
corrente si comandano:
– la frequenza, attraverso l'angolo θe ;
– la fase, attraverso l'angolo ϕ * ;
– il modulo, attraverso I * .
Di seguito si riporta un primo schema di controllo per una macchina IPM.
18 |i| = I
http://www.damianozito.org
85
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 89: Schema di controllo per una IPM nel riferimento abc
Il controllo appena visto può essere sviluppato nel sistema di riferimento qdo.
Figura 90: Schema di controllo per una IPM nel riferimento qdo
Lo schema di controllo in Figura 90 è quello commercialmente più utilizzato perché presenta dei
vantaggi rispetto a quello nel riferimento abc. Questo nonostante la struttura hardware richiesta sia
più complessa (bisogna che il sistema di controllo calcoli istante per istante le matrici K).
Se ci si trova nella situazione di regime permanente, quando si utilizza l'azionamento con
*
*
*
riferimento abc, i a ( t)=I cos(ω t +ϕ ) (e le altre due correnti) subisce l'influenza del regolatore di
corrente che avrà quindi una certa banda passante.
http://www.damianozito.org
86
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 91: Diagrammi di bode del regolatore di corrente
Sia infatti ωe la frequenza di lavoro, segnata in rosso nella Figura 91, allora si ha che
i(t)=I *⋅∣W ( j ω e )∣⋅cos (ωe t+ ϕ*)+⟨ W i (i ωe )⟩ .
E cioè la corrente subisce un'attenuazione in fase e in modulo per effetto del regolatore di corrente a
meno che non si lavori per banda passante di una decade inferiore a quella del regolatore.
Se quindi si modula a 10 kHz, per quanto detto nella trattazione della macchina in cc, la banda
passante dell'anello di corrente è al limite 500 Hz. Quindi ωe =50 Hz , ma anche questo è un valore
al limite.
La differenza con lo schema nel riferimento qdo sta proprio nel fatto che le grandezze id e iq sono
continue, cioè costanti a regime permanente. La presenza dell'integrale garantisce errore nullo (a
r.p.) e le due correnti risultano essere quelle desiderate. Nel caso di Figura 90 l'integrale non può
garantire errore nullo perché in ingresso riceve una grandezza sinusoidale.
Si noti poi che se la frequenza di lavoro nel caso abc, è tale da comportare una certa attenuazione di
fase (mentre si può trascurare quella di modulo), allora la situazione è chiaro che le correnti id e iq
non sono quelle desiderate.
http://www.damianozito.org
87
Appunti di Azionamenti Elettrici a cura di Damiano Zito
δ
i*
q
*
id
i
*
bc
da
φ
i
*
q
i
*
bc
qa
θe
a
d
Figura 92: Effetto dell'attenuazione di fase sul vettore
delle correnti
La situazione è stata rappresentata in Figura 92 dove vengono messe in arancione le grandezze
dovute al sistema di controllo con riferimenti abc.
Si nota come è la fase del vettore ad essere il problema principale (e non tanto il modulo) perché
porta a non raggiungere lo scopo della strategia MTPA.
Si può migliorare lo schema in qdo pensando di compensare gli effetti della tensione indotta come
per la macchina in cc e quindi creare un anti-windup nell'anello di corrente.
Figura 93: Compensazione della fem indotta e anti-windup nell'anello di corrente della macchina
AC Brushless
Per quanto riguarda la saturazione bisogna fare attenzione al fatto che il limite imposto non è sulle
http://www.damianozito.org
88
Appunti di Azionamenti Elettrici a cura di Damiano Zito
componenti vq e vd, ma sul modulo v*.
presat
Vmax
q
v*
*
vd
*
vq
a
d
Figura 94: Saturazione sul modulo v*
Per questo motivo nel controllo mostrato in Figura 93 viene effettuata una trasformazione da
coordinate rettangolari in polari. In questo modo viene saturato ∣v *∣ a Vmax per poi riconvertire le
coordinate polari in rettangolari e ritrovare vq e vd.
Algebricamente si può scrivere:
∣v * presat∣= √ v q *2 + v d *2⩽V max , mentre la fase vale
⟨v * presat ⟩=arctan
(
)
v d * presat
.
v q * presat
Calcolare numericamente la fase è un'operazione difficile. Si procede allora con strategie diverse.
V max 19
Una tra queste è quella di calcolare K =
, se K < 1 allora si comandano direttamente
∣v * presat∣
{
v q *=K v q * presat
senza effettuare trasformazioni. Questa tecnica permette quindi di evitare il
v d *=K v d * presat
calcolo di una funzione come l'arctan.
19 Se K>1 naturalmente non si è in saturazione.
http://www.damianozito.org
89
Appunti di Azionamenti Elettrici a cura di Damiano Zito
11. Azionamenti AC Brushless: estensione del
campo di velocità (deflussaggio)
Anche nella macchia AC Brushless, nonostante i magneti permanenti, è possibile effettuare il
deflussaggio per velocità maggiori di quella nominale.
A differenza della macchina in corrente continua la corrente in questo è costante, mentre nel primo
caso bastava ridurre la I di eccitazione per ridurre il flusso.
L'obiettivo in questo caso è mantenere costante per velocità maggiori a ωn la grandezza ω λ PM 20.
V
E
Vn
Eo
ω
ωn
Figura 95: Caratteristica tensione-velocità della macchina
AC Brushless
Il primo tratto della caratteristica tensione-velocità corrisponde, come è noto, al tratto coppia
costante. Mentre il tratto per velocità maggiori a quella nominale è quello a potenza costante.
L'analisi svolta in questa sezione viene svolta prendendo in considerazione una SPM, anche se
queste macchine (si vedrà avanti) sono poco adatte al deflussaggio. La trattazione diventa più
semplice e può nel caso essere generalizzata in un secondo momento.
In generale si ha comunque che:
{
d
λ +ω λ
dt q e d
d
v d =R i d + λ d −ω e λ q per cui si andando a sostituire le equazioni diventano
dt
λ q=L q i q
λ d =Ld i d +λ PM
v q= Ri q +
20 Lo si evince più avanti.
http://www.damianozito.org
90
Appunti di Azionamenti Elettrici a cura di Damiano Zito
{
d
i +ω L i +ω λ
dt q e d d e PM .
d
v d =R i d + L d i d −ωe Lq i q
dt
v q= Ri q + L q
Se l'analisi viene svolta in regime permanente si può trascurare il termine transitorio. L'altra ipotesi
è quella di trascurare il contributo (più piccolo) ωe Lq i q . Questo perché il termine preponderante è
ω E λ PM e dunque si considera solo l'asse q:
{
v q= Ri q +ω
e L d i d +ω e λ PM
⏟
eq
v d =R i d−ω
e Lq i q
⏟
.
ed
L'obiettivo a questo punto è mantenere costante ωe Ld i d +ωe λ PM . Si ricava facilmente il vettore
2
2
della fem indotta E=ω e √ λ d +λ q .
Sotto l'ipotesi di trattare una macchina a rotore liscio (SPM) si ha che L d =Lq da cui segue i d =0
(condizione di MTPA). Ciò significa che per ogni velocità fino a quella nominale si ha:
E 0=ω e λ PM
∀ ωe ⩽ω en .
Per velocità superiori:
ωe λ PM + ωe Ld i d = E 0=ωen λ PM
∀ ωe ⩾ωen .
ω
Sostituendo il valore della velocità in PU: ω pu= ω e ,
en
ω pu (λ PM + L d i d )=λ PM .
λ PM (1−ω pu)
che riesce a mantenere la fem al valore costante
ω pu Ld
desiderato. Moltiplicando e dividendo questa espressione per la velocità nominale si ottiene:
Si ricava quindi la corrente i d *=
i d *=
E 0 (1−ω pu)
.
ωe Ld
In altre parole si sta generando attraverso tale corrente un campo che si oppone a quello dovuto ai
magneti permanenti (Figura 96). Più aumenta la velocità più deve diminuire il flusso dei PM lungo
l'asse d. L'operazione di deflussaggio può richiedere così molta corrente per abbatterlo.
Questo è il motivo per cui una macchina SPM che per via dell'elevato traferro ha una bassa
induttanza è poco indicata per questa tecnica. In particolare si nota dall'espressione della corrente
che piccola induttanza significa in questo caso elevata corrente.
Si trattano adesso i limiti generali del deflussaggio.
Si indica con Imax la corrente massima ammissibile dalla macchina. La corrente residua sull'asse q
utile a generare coppia vale:
http://www.damianozito.org
91
Appunti di Azionamenti Elettrici a cura di Damiano Zito
i qmax *= √I 2max −i dmax * 2 .
Si indica poi la corrente richiesta sull'asse q dalla coppia:
T*
ĩq *=
.
KT
q
Ld
id
a
λ PM
d
Figura 96: Diagramma vettoriale del deflussaggio in una
macchina AC Brushless
Nel sistema di controllo vanno quindi implementate le espressioni:
{
̃
∀ ω⩽ω n ;
i q *= i q *
̃
min ( i q * , i qmax )
∀ ω>ω n
Formula 1: iq da implementare
nel controllo
{
0
i d *= E 0 (1−ω pu)
ωe Ld
∀ ω⩽ωn
∀ ω>ωn
.
Per concludere sui limiti del controllo bisogna osservare la Figura 97 che rappresenta la
caratteristica coppia-velocità.
In particolare si nota che fino alla velocità nominale la coppia rimane costante e successivamente si
http://www.damianozito.org
92
Appunti di Azionamenti Elettrici a cura di Damiano Zito
lavora a potenza costante. In questa zona la id aumenta e si riduce la coppia (quindi iq). Se viene
raggiunto il limite in corrente ci si trova nella zona colorata in magenta per cui la corrente iq non
decresce più con la velocità ma si annulla fino a raggiungere il valore di velocità massima teorico.
id
Tn
iq
|I| = |Imax|
Iq = 0
ωn
ωn teorica
ω
Figura 97: Limite in corrente del deflussaggio della macchina AC
Brushless
Questa velocità però non è detto sia a potenza costante.
Lo schema di controllo con l'implementazione del deflussaggio è riportato di seguito.
Figura 98: Schema di controllo di una macchina AC Brushless con deflussaggio
Nello schema il secondo blocco id, iq Calculator decide a seconda della velocità quale corrente
desiderata deve imprimere come descritto a pagina 92. Il primo invece calcola i valori in base al
MTPA.
http://www.damianozito.org
93
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Azionamenti con Motori
Asincroni
1. Principio di funzionamento della macchina
asincrona
La macchina asincrona è una macchina molto robusta ed economica, molto diffusa e studiata. È
usata nel 70-80 % delle applicazioni industriali e spesso lavora a velocità costante.
Negli azionamenti elettrici si tende a convertire il funzionamento in “Variable Speed Drives”. Gli
approcci utilizzati sono:
– controllo scalare;
– controllo vettoriale.
Requisiti e prestazioni del controllo vettoriale sono:
•
conoscenza approfondita della macchina;
•
trasduttore di posizione;
•
funzionamento nei 4 quadranti;
•
controllo della corrente in modulo e fase anche nei transitori;
•
dinamiche eccellenti e permette di realizzare servo-azionamenti.
Di seguito vengono mostrate una sezione di una macchina asincrona trifase e il circuito equivalente.
http://www.damianozito.org
94
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 99: Sezione di una macchina asincrona trifase
Figura 100: Circuito equivalente monofase della macchina asincrona
Nella macchina asincrona, detta anche a induzione, gli avvolgimenti statorici vengono alimentati da
http://www.damianozito.org
95
Appunti di Azionamenti Elettrici a cura di Damiano Zito
tre tensioni sinusoidali trifase di pulsazione ω che generano un campo, approssimativamente
sinusoidale il quale ruota con la pulsazione:
ω s=
ωe 2 π f
60 f
=
→ ne=
.
p
p
p
Dove p rappresenta il numero di coppie polari di statore.
Sul rotore – che funziona in corto-circuito – si creano delle fem indotte le quali producono la
circolazione di una corrente rotorica e pertanto si viene a creare una coppia motrice che porta in
rotazione il rotore nella stesso verso del campo rotante. Il rotore vede ruotare il campo di statore ad
una velocità relativa n s−nr .
Il rotore ruota quindi ad una velocità inferiore rispetto a Bs e pertanto si definisce scorrimento la
grandezza:
s=
n s – n r ωs −ωr
= ωs .
ns
Il moto relativo tra rotore e campo statorico genera delle correnti di rotore alla frequenza di
scorrimento:
f r=
(n s – nr ) p [n s – (ns (1−s))] p
=
=s f
60
60
21
.
Quindi la frequenza rotorica è massima per s=1 (50 Hz) mentre a regime vale qualche decina di
Hertz.
Lo scorrimento è fondamentale per il funzionamento della macchina. Il campo rotante trascina con
sé il il rotore e se si verificasse che il numero di giri si uguaglia i conduttori rotorici risulterebbero
fermi rispetto a Bs e dunque quest'ultimo non potrebbe indurvi fem e quindi correnti. Di
conseguenza non eserciterebbe alcuna coppia sul rotore.
Il campo generato dalle correnti di rotore ha una pulsazione pari a fr e ruota rispetto al rotore con
velocità pari a s ω . Rispetto allo statore risulta che la velocità del campo di rotore vale:
p
ω
ω −ω
ωcr =s e +ω r= sω r ω + ωr =ω s .
s
p
p
(
)
Ciò vuol dire che il campo di rotore ruota alla stessa velocità del campo statorico, e ciò rende
possibili lo sviluppo di una coppia diversa da zero per regimi di funzionamento con s variabile.
Nel circuito equivalente spesso viene riportata la resistenza elettrica fittizia che come è noto è solo
una rappresentazione del carico meccanico. Si definisce potenza sincrona (o trasmessa):
P sinc =P J + P mecc .
Dove:
21 Avendo sostituito n = ns (1-s).
http://www.damianozito.org
96
Appunti di Azionamenti Elettrici a cura di Damiano Zito
P sinc =T
ωe
R '
=3 r I r ' 2 ;
p
s
2
P J =3 R r ' I r ' ;
P mecc=T ω r =3 R r '
Essendo ωr =
(1 – s ) 2
Ir' .
s
ωe
(1 – s) si ricava la coppia elettromagnetica:
p
p R'
T =3 ωe r I r ' 2 .
s
Figura 101: Potenze nella macchina asincrona
Sostituendo il valore di I ' r nell'espressione della coppia e approssimando V s≃V m si ottiene:
p R'
T =3 ωe r
s
[( ) ]
V 2m
R 'r 2
+ X 2dr
s
.
Inoltre se si verifica la condizione di adattamento, per cui:
R 'r
=X ' dr ,
s max
allora si arriva all'espressione della coppia massima:
p
T max =3 ω
e
V 2m
.
2 X ' dr
L'andamento della coppia al variare dello scorrimento e della velocità è riportato in Figura 102:
http://www.damianozito.org
97
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 102: Caratteristica coppia-velocità della macchina asincrona
Nelle macchine asincrone a rotore avvolto il controllo di coppa può essere effettuato variando la
resistenza di rotore. Ciò è permesso dal fatto che gli estremi dell'avvolgimento rotorico sono
connessi ad anelli collettori cui si collega l'avviatore a resistenza variabile. La coppia massima
rimane costante e il risultato (per frequenza costante) è quello nella figura seguente.
Figura 103: Controllo della coppia mediante resistenza
variabile
http://www.damianozito.org
98
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Questo tipo di regolazione però è molto dissipativa e dunque di scarso interesse.
Grazie all'utilizzo di un'alimentazione con inverter è possibile variare tensione e frequenza della
macchina.
Dalle espressioni precedenti risulta che la coppia massima aumenta proporzionalmente col quadrato
della tensione mentre diminuisce secondo la relazione 1/ f 2 .
2. Controllo scalare: Controllo V/f costante ad
anello aperto e chiuso
Il controllo scalare può essere effettuato variando tensione e frequenza nello stesso rapporto.
All'aumentare della frequenza aumenta la velocità di rotazione e così all'aumentare della tensione
aumenta la coppia. Il tutto secondo le relazioni fondamentali richiamate in precedenza.
Per compensare la caduta resistiva alle basse frequenze bisogna effettuare un Voltage Boost22. Cioè
aumentare la tensione rispetto alla f per poi mantenere costante il rapporto.
V
f
Figura 104: Boost di tensione
T
ω
Figura 105: Caratteristica coppia-velocità per
rapporto V/f = costante (non è mostrato il Boost di
tensione)
22 Per frequenze più alte si può approssimare Vs = Vm.
http://www.damianozito.org
99
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Vm
=L m I m =cost e cioè flusso
f
totale al traferro costante. Alle basse frequenze però non si può trascurare l'effetto resistivo di R s .
Si ha infatti: V̄ s=R s Īs+ jX ds Īs + V̄m .
Infatti per frequenze alte vale la condizione V s≃V m , che significa
Il risultato è mostrato in Figura 106.
Figura 106: Caratteristica della macchina al variare di
V/f costante (con Voltage Boost)
Il metodo più comune per il controllo V/f costante della macchina asincrona è quello ad anello
aperto e riportato di seguito.
Si tratta comunque di un azionamento economico, privo di sensori, ed è utilizzato generalmente per
applicazioni a velocità costante.
http://www.damianozito.org
100
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 107: Schema a blocchi V/f ad anello aperto
Si ricava quindi una frequenza a partire dalla velocità desiderata. La frequenza viene limitata dal
blocco Profiler che sostanzialmente è un limitatore di derivata e quindi evita brusche variazioni di
frequenza con la conseguente instabilità della macchina (perché la velocità non riesce ad inseguire
la variazione di f) come si vede in Figura 108.
TL
f1
f2
ωr
Figura 108: Variazione improvvisa di frequenza
Lo stesso vale in caso di decelerazione a partire dalla frequenza f2.
http://www.damianozito.org
101
Appunti di Azionamenti Elettrici a cura di Damiano Zito
T
TL
f2
f1
ωr
ω
Figura 109: Decelerazione brusca
In questa situazione la macchina lavora nel quadrante a coppia negativa, quindi restituisce energia
alla rete. Il punto è che il convertitore spesso non lo consente e l'energia si immagazzina in un
condensatore sul quale aumenta la tensione. Se questa aumenta troppo c'è il rischio di danneggiare
l'isolamento e si incorre nella distruzione del dispositivo. Per ovviare a ciò si può inserire una
resistenza di frenatura o si effettua una frenatura lenta con l'utilizzo, appunto, del Profiler.
Lo svantaggio di questo tipo di azionamento risiede nel fatto che non vi è alcun controllo su
possibili aumenti di corrente (se si blocca il rotore per esempio).
Se si desidera migliorare le prestazioni si può inserire una misura di velocità o di corrente. In genere
si effettua la misura della corrente di link.
Lo schema viene riportato in Figura 107.
Si inserisce quindi il blocco Slip Limit. Se la corrente rimane entro un certo valore il limitatore non
interviene, mentre se supera un valore superiore viene incrementata una certa Δf positiva da detrarre
alla f calcolata dal Profiler. Nel caso in cui il valore della I link sia sotto ad un valore di soglia
minore di zero allora l'incremento di frequenza sarà negativo.
http://www.damianozito.org
102
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 110: Schema a blocchi V/f ad anello aperto con misura della
corrente di link
3. Controllo scalare: Controllo di Scorrimento
Se si suppone di avere una coppia di carico costante, la caratteristica per un controllo V/f costante è
quella in Figura 111.
TL
ωr1
s1
ω1/p
ω2/p
ωr2
0
s2
0
Figura 111: Caratteristica con TL costante
In altre parole questo tipo di controllo (per coppia di carico costante) significa mantenere costante la
frequenza di scorrimento. Si sceglie di controllare tale grandezza.
Infatti risulta:
ω1
ω
−ωr1 = 2 −ω r2 ;
p
p
http://www.damianozito.org
103
Appunti di Azionamenti Elettrici a cura di Damiano Zito
s 1 ω1 s 2 ω2
.
=
p
p
Questa scelta permette di tenere sotto controllo la coppia e quindi la corrente. Si può pensare inoltre
di ottimizzare, al variare dello scorrimento s, grandezze come il cosφ, il rendimento e la stessa
coppia (Figura 112).
Figura 112: Coppia, Fattore di potenza e rendimento in
funzione di s
Lo schema di controllo associato è il seguente:
Figura 113: Controllo di scorrimento
http://www.damianozito.org
104
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Per questo schema vi è il bisogno di un trasduttore di velocità per annullare l'errore grazie al
regolatore PI.
Si noti bene che in uscita al PI non vi è la coppia come nel caso visto per la macchina in cc, bensì la
tensione. D'altronde in questo preciso caso variando la tensione, varia la caratteristica della coppia
(verso l'alto o verso il basso).
La frequenza che viene comandata è la somma della frequenza di scorrimento e quella meccanica.
Si ottiene quindi il campo di funzionamento della macchina asincrona riportato di seguito in Figura
114.
Figura 114: Campo di funzionamento della macchina
asincrona
Si può analizzare infatti l'espressione della coppia massima (si ottiene nella condizione di
adattamento dell'impedenza). Per cui si può scrivere che vale:
T max =K T
Vs
f
2
( )
23
.
•
Primo tratto: si effettua un controllo V/f costante. La coppia è pari a quella massima e la
potenza cresce linearmente con la velocità, fino al valore nominale.
•
Secondo tratto (deflussaggio): si effettua un controllo di scorrimento. La tensione si
mantiene costante al valore nominale, la coppia diminuirebbe col quadrato della frequenza.
Siccome però la potenza non può andare oltre il valore nominale e deve rimanere costante a
tale valore, bisogna controllare la coppia perché diminuisca come 1/f (Motor Torque). La
corrente di statore quindi rimane pressoché costante (in realtà all'aumentare della frequenza
23 In
KT
si raggruppano i valori costanti. Per l'espressione della coppia si rimanda alla teoria delle macchine elettriche.
http://www.damianozito.org
105
Appunti di Azionamenti Elettrici a cura di Damiano Zito
cambia il comportamento dei parametri della macchina, e bisogna tenerne conto.).
•
Terzo tratto: si raggiunge un limite per la coppia. Da questo punto in poi diminuisce con la
legge 1/ f 2 , la frequenza di scorrimento si mantiene costante e la potenza diminuisce.
4. Modello in regime transitorio della macchina
asincrona
Si modellizza la macchina per il regime variabile al fine di poter affrontare lo studio del controllo
vettoriale, il quale prevede una prima analisi nel regime permanente e successivamente nel regime
transitorio.
Figura 115: Sezione della macchina asincrona
Nella schematizzazione degli avvolgimenti rotorici si utilizza uno schema trifase. Questa però è una
rappresentazione equivalente dal punto di vista elettromagnetico di quello che può essere
l'avvolgimento reale di rotore. Il quale si ricorda può essere o avvolto o a gabbia.
Le equazioni della macchina asincrona in regime variabile sono:
d λ abc , s
dt ;
d λ abc , r
v abc , r= Rr i abc , r +
dt
v abc , s =Rs i abc , s +
λ abc , s=λ abc , ss + λ abc , sr = Labc , s i abc ,s + Labc , sr i abc ,r
.
λ abc , r=λ abc , rs + λ abc ,rr =Labc , rs i abc , s + L abc , r i abc , r
http://www.damianozito.org
106
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Si individuano le matrici, semplificando ancora la notazione.
[
1
− Lms
2
( Lls + L ms)
1
Ls = − Lms
2
1
− Lms
2
1
− L ms
2
1
− L ms
2
( L ls + L ms)
1
− Lms
2
( Lls + Lms )
]
[
( Llr + Lmr )
1
Lr = − Lmr
2
1
− Lmr
2
,
1
− L mr
2
1
− Lmr
2
1
− Lmr
2
(L lr + Lmr )
1
− L mr
2
( L ls + Lmr )
]
.
Dove:
Lls è l'induttanza di dispersione dovuta al flusso che non si concatena con le altre fasi;
L ms è l'induttanza di magnetizzazione legata al flusso di una fase concatenato con le altre fasi di
statore. Il valore -1/2 è dovuto allo sfasamento di avvolgimento tra le fasi che sono a 120°.
Lsr =L sr
[
2
cos θ r + π
3
]
) cos (θ + 43 π )
4
2
cos (θ + π )
cos θ
cos (θ + π ) , L =L
3
3
2
4
cos (θ + π ) cos (θ + π )
cos θ
3
3
cos θ r
(
r
r
r
r
r
r
r
T
sr
rs
24
.
Si vogliono ora riportare le grandezze rotoriche (circuito secondario) al circuito di statore
(primario). Con questa operazione si ipotizza un circuito fittizio lato statore, composto dallo stesso
numero Ns di spire e attraversato da una corrente Ir' che produce gli stessi effetti elettromagnetici
dovuti alla circolazione della corrente rotorica Ir .Quindi
stessa forza magneto-motrice:
N s⋅i abc , r ' =N r⋅i abc , r → i abc , r=
stesso flusso:
Ψ abc , r=
Le tensioni sono proporzionali ai flussi:
v abc , r=
Ns
;
i'
N r abc ,r
λ abc ,r λ ' abc , r
N
→ λ abc ,r = s λ ' abc , r .
=
Nr
Ns
Nr
Nr
.
v'
N s abc ,r
Si ricavano le equazioni con le grandezze di rotore riportate al primario, ricordando che i termini
sono matrici e indicando p = d /dt :
Nr
N
N
v ' abc , r =Rr s i ' abc ,r + p r λ ' abc , r →
Ns
Nr
Ns
λ abc ,s =L s i abc ,s +
Ns 2
v ' abc ,r =
R r i' abc , r + p λ ' abc , r ;
Nr
( )
Ns
;
L i'
N r sr abc ,r
24 Per simmetria le due matrici sono l'una la trasposta dell'altra.
http://www.damianozito.org
107
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Nr
N
λ ' abc ,r = Lrs i abc , s + s L r i ' abc , r →
Ns
Nr
λ ' abc , r=
Ns
N
Lrs i abc , s + s
Nr
Nr
2
( )
Lr i ' abc ,r .
Si può a questo punto riscrivere il modello della macchina asincrona in regime variabile con le
grandezze di rotore riportate allo statore:
{
v abc , s=R s i abc , s + p λ abc ,s
,
v ' abc , r =R' r i ' abc ,r + p λ ' abc , r
{
Ns
L i'
N r sr abc , r
.
Ns
Ns 2
λ ' abc ,r =
L i
+
L r i ' abc ,r
N r rs abc , s N r
λ abc , s= Ls i abc , s +
( )
Bisogna però analizzare le matrici e vedere l'impatto che ha su di esse l'aver riportato le grandezze
di rotore al circuito di statore. In particolare risulta che
L ' sr =
Ns
L =L ms , questo perché il circuito fittizio si trova allineato con lo statore.
N r sr
Si definiscono ora:
2
N
L ' lr = s
Nr
( )
Ns 2
Llr ; L ' mr =
L mr= Lms .
Nr
( )
Dove L ' mr è l'induttanza legata al flusso generato dall'avvolgimento fittizio concatenato con se
stesso e quindi con lo statore.
Si riscrivono le equazioni dei flussi:
{
λ abc , s= Ls i abc , s + L sr ' i ' abc , r
.
λ ' abc ,r = L' rs i abc , s + L r ' i ' abc , r
Dalle considerazioni svolte si ricavano le nuove matrici.
L ' sr =L ms
(
2
cos θ r + π
3
)
) cos (θ + 43 π )
4
2
cos (θ + π )
cos θ
cos (θ + π ) ;
3
3
2
4
cos (θ + π ) cos (θ + π )
cos θ
3
3
cos θ r
(
r
r
r
r
r
r
r
http://www.damianozito.org
108
Appunti di Azionamenti Elettrici a cura di Damiano Zito
(
(L lr ' + Lms )
L r '= − 1 Lms
2
1
− Lms
2
1
− Lms
2
1
− L ms
2
1
− L ms
2
( Llr '+ Lms )
1
− Lms
2
( Llr ' + L ms)
)
.
Si riporta il modello nel sistema di riferimento qdo:
Figura 116: Assi per la
trasformazione qdo
f qdo , s= K s⋅f abc ,s
.
f qdo , r= K r⋅f abc ,r
{
v qdo , s=R s i qdo , s + p λ qdo , s+ ω λ dq , s
,
v ' qdo ,r =R ' r i ' qdo , r + p λ ' qdo ,r +(ω−ω r ) λ ' dq , r
dove
λ ds
λ dr
λ dq , s= −λ qs e λ ' dq , r= −λ qr .
0
0
( )
( )
I flussi diventano:
{
−1
λ qdo , s=K s λ abc=(K s L s K −1
s ) i qdo , s +( K s L sr ' K s )i ' qdo ,r .
−1
λ ' qdo , r =( K r L ' rs K −1
r )i qdo , s +( K r Lr ' K r )i ' qdo , r
Svolgendo i calcoli le matrici valgono:
http://www.damianozito.org
109
Appunti di Azionamenti Elettrici a cura di Damiano Zito
(
(
K s L s K −1
s =
−1
r
3
( L ls + Lms )
2
K s Ls K =
0
0
3
L
2 ms
0
0
0
0
0
) (
, K r Lr K −1
3
r =
( Lls + Lms ) 0
2
0
L ls
0
3
( L ' lr + L ms)
2
0
0
0
0
)
,
3
( L' lr + L ms) 0
2
0
L' lr
)
,
3
Lms 0
2
0
0
3
dove M = Lms .
2
Grazie alla trasformazione qdo poiché gli assi sono tra loro ortogonali sparisce il termine di mutuo
accoppiamento nelle matrici.
Riepilogando:
{
{
v qdo , s=R s i qdo , s + p λ qdo , s+ ω λ dq , s
,
v ' qdo ,r =R ' r i ' qdo , r + p λ ' qdo ,r +(ω−ω r ) λ ' dq , r
λ qdo , s=L qdo ,s i qdo , s+ M qdo i ' qdo , r
.
λ ' qdo , r =M qdo i qdo ,s + Lqdo , r i ' qdo ,r
Le equazioni possono essere scritte in forma scalare:
{
{
{
{
v qs=R s i qs + p λ qs +ω λ ds
v ds=R s i ds + p λ ds −ω λ qs ;
v o s =Rs i o s + p λ o s
v ' qr =R ' r i ' qr + p λ ' qr +(ω−ωr )λ ' dr
v ' dr =R r ' i ' dr + p λ ' dr −(ω−ω r )λ ' qr ;
v ' o r= R' r i' o r + p λ ' o r
λ qs=( Lls + M )i qs + M i' qr
λ =L s i qs + M i ' qr dove L =L + M
,
;
λ ds=( Lls + M )i ds + M i' dr → qs
s
ls
λ ds =L s i ds + M i ' dr
λ ds=Lls i o s
{
λ ' qr =M i qs +(L ' lr + M ) i' qr
λ ' qr =M i qs L' r i' qr dove L ' =L ' + M
,
.
λ ' dr =M i ds +(L ' lr + M ) i' dr →
r
lr
λ ' dr =M i ds L' r i' dr
λ ' o r =L ' lr i ' o r
{
Le equazioni dei flussi si possono ancora scrivere secondo la forma che segue:
{
λ qs=Lls i qs + M (i qs+i ' qr ) ,
λ ds=Lls i ds + M (i ds+i ' dr )
{
λ ' qr =L ' lr i' qr + M (i qs +i ' qr ) .
λ ' dr =L ' lr i' qr + M (i ds +i ' dr )
http://www.damianozito.org
110
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Dove:
M (i qs +i ' qr ) è il termine legato al traferro totale sull'asse q ;
M (i ds +i ' dr ) è il termine legato al flusso totale lungo l'asse d ;
Si individua quindi il vettore spaziale delle correnti:
{
i qds =i qs − ji ds
.
i ' qdr =i' qr − ji ' dr
Pertanto il flusso al traferro si può formulare nel seguente modo:
λ ag= M ( i qds +i ' qdr )=λ agq − j λ agd .
q
Iqr'
Iqs
a
I'qdr
λag
Idr'
Iqds
Itot
Ids
d
Figura 117: Flusso al traferro
http://www.damianozito.org
111
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 118: Circuito equivalente nel riferimento arbitrario
In base alle equazioni scritte nel sistema di riferimento arbitrario è possibile definire un circuito
equivalente per l'asse q, per l'asse d e per l'asse o (Figura 118). Per quanto riguarda il circuito di
rotore si impone:
{
v ' dr =0
v ' qr =0 .
v ' o r=0
Questo perché normalmente si trova in corto-circuito.
Tale modellizzazione grafica però non esprime la conversione elettromeccanica dell'energia.
Per esprimere la coppia quindi si passa attraverso l'espressione della coenergia, ovvero (nel caso di
linearità) l'energia magnetica immagazzinata nella macchina, che è esprimibile come:
dW mecc =−T d θ r m=dW m .
Dove θr = p θr m .
Per cui la coppia vale:
T e= p
∂W
.
∂θ r
L'energia magnetica immagazzinata nella macchina nella macchina dipende da tutti i flussi di
http://www.damianozito.org
112
Appunti di Azionamenti Elettrici a cura di Damiano Zito
statore e di rotore. Ai fini della valutazione, non si considerano i flussi dispersi. I termini saranno
1 2
tutti del tipo L i . Si ricavano l'energia dovuta al:
2
Flusso di statore per correnti di statore:
1 T
[i ( L −L I ) iabc ,s ] ;
2 abc ,s s ls
Flusso di statore per correnti di rotore:
1 T
i
L i
;
2 abc , s sr abc ,r
Flusso di rotore per correnti di rotore:
1 T
[i ( L −L rl I )i abc ,r ] ;
2 abc ,r r
Flusso di rotore e correnti di statore:
1 T
i
L i
.
2 abc , r rs abc , s
La somma di questi contributi fornisce l'energia immagazzinata al traferro.
Analizzando le matrici e ricordando quanto già è stato scritto per esse, si ha che L s e L r non
dipendono dall'angolo θr così come non dipendono da esso i abc , s e i ' abc ,r .
Per ricavare la coppia è utile solo il contributo dovuto alla matrice L sr = Lrs :
T = p i Tabc , s ∂∂θ L ' sr i ' abc , r .
r
Lo svolgimento dell'equazione è molto complesso. Quindi si scrivono le espressioni delle correnti
nel riferimento qdo:
T ∂
−1
.
T = p( K −1
s i qdo , s )
∂θ r L ' sr (K r i ' qdo , r )
Il risultato è:
T=
3
p M (i qs⋅i ' dr – i ds⋅i ' qr ) ;
2
T=
3
p (λ ' qr⋅i ' dr – λ ' dr⋅i' qr ) .
2
Esistono però altre espressioni per la coppia e vengono riportate in Figura 119.
http://www.damianozito.org
113
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 119: Espressioni di coppia per la macchina asincrona
Con l'equazione di coppia si completa quindi il modello della macchina asincrona nel regime
variabile.
Si noti che quando si esegue una trasformazione di coordinate il nuovo sistema può ruotare a
velocità:
•
ω=0 ;
•
ω=ωe ;
•
ω=ωr .
Di seguito alcune caratteristiche che evidenziano le differenze in base alla scelta di ω .
http://www.damianozito.org
114
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 120: Variabili in un sistema di riferimento stazionario
http://www.damianozito.org
115
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 121: Variabili in un sistema di riferimento sincrono
http://www.damianozito.org
116
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 122: Variabili nel sistema di riferimento rotorico
5. Controllo vettoriale diretto e indiretto: analisi a
regime permanente
Il circuito equivalente monofase con la quale si è studiata la macchina nella teoria delle macchine
elettriche ed utilizzato all'inizio del capitolo è “arbitrario”. Si può però dimostrare che questo
circuito si ricava dal circuito equivalente generalizzato per una particolare scelta del parametro a
così come dimostrato in Figura 123.
http://www.damianozito.org
117
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 123: Circuito equivalente generalizzato
L m 25
si arriva ad un circuito privo della reattanza di dispersione rotorica così come
Lr
mostrato in Figura 124.
Scegliendo a=
Figura 124: Circuito equivalente della macchina asincrona per a = Lm/Lr
Da tale circuito risulta quindi che:
I s= I s Φ + I sT ;
I sT =−
Lr
I ;
Lm sr
Er= j ω λr .
Si ricava la corrente:
I s Φ=
(L m / Lr ) E r
j ωe λ r λ r
=
=
.
j ω e L m Lm
Lm
j ωe
L
Lr m
( )
25 Lm = M.
http://www.damianozito.org
118
Appunti di Azionamenti Elettrici a cura di Damiano Zito
E quindi il flusso vale λ r =Lm I s Φ ed è perciò proporzionale alla corrente che circola nel ramo
induttivo.
Per definizione si può scrivere che:
p R'
T =3 ωe r I ' 2r .
s
Tale espressione può essere ancora riscritta nella forma:
Lm
L2m
p
p
T =3 ω E r I r =3 ω (⏟
ωe Lm I s Φ ) I sT
=3 p
I I .
e
e
Lr
Lr s Φ sT
Er
(⏟
)
Ir
Si giunge così al risultato:
T =3 p
Lm
λ I .
Lr r sT
Dall'analisi appena svolta si giunge a due importanti conclusioni. La prima è che la corrente che
genera il flusso λ r è la I s Φ . Quindi una volta determinata tale corrente per instaurare il flusso
rotorico si determina la coppia che è proporzionale alla corrente I sT .
In prima analisi le due correnti sembrano tra loro disaccoppiate, ma mettendo a sistema le due
espressioni:
{
(L /L )E
I sT = m 2 r r
Lm R r
L s
→ I sT = r
j ωe Lm I s Φ .
Lr s
Lm R r
(L /L )E
I s Φ = m 2r r
j ωe L m / L r
( )
Facendo il modulo dell'espressione ricavata si trova l'espressione dello scorrimento:
s ω e=
R r I sT
.
Lr I s Φ
http://www.damianozito.org
119
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 125: Analisi del controllo vettoriale in regime permanente
In altre parole questo risultato dice che controllando flusso e coppia si impone lo scorrimento della
macchina.
Studiando i vettori26, a partire dal flusso λ r , si scopre ancora che passando dai fasori del regime
permanente ai vettori spaziali in rotazione con riferimento sincrono ( ω=ωe ), le due correnti sono:
I s Φ =I ds ; I sT =I qs .
E queste correnti sono le due grandezze cui si basa il controllo vettoriale della macchina che
assicurano rispettivamente flusso e coppia.
A questo punto si ricordi che negli azionamenti brushless con un trasduttore di posizione era
possibile determinare la posizione del flusso rotorico. Nel caso della macchina asincrona ciò è reso
impossibile dallo scorrimento, nei brushless il rotore ruota alla stessa velocità del campo di statore.
È chiaro che per risolvere il diagramma vettoriale appena visto vi è bisogno di conoscere la
posizione iniziale di λ r per poter posizionare il sistema qdo. Infatti si impone che l'asse d sia
orientato lungo l'asse del flusso di rotore.
Questo è il problema del controllo, ovvero l'orientamento di campo.
Per questo motivo il controllo vettoriale si suddivide in controllo vettoriale diretto e indiretto.
In particolare:
•
nel controllo vettoriale indiretto si misura la posizione meccanica del rotore e sfruttando la
relazione dello scorrimento si ricava θr e quindi θe , cioè la fase del flusso;
•
nel controllo vettoriale diretto si risale a θr sfruttando le relazioni matematiche che
governano la macchina, si eseguono quindi le misure di tensione e corrente.
26 La X's è la reattanza transitoria di statore X's = ωe(Ls – Lm2 Lr).
http://www.damianozito.org
120
Appunti di Azionamenti Elettrici a cura di Damiano Zito
5.1. Schemi controllo vettoriale indiretto
Figura 126: Schema di controllo vettoriale indiretto con CRPWM
Per analizzare lo schema di Figura 126 si scrive:
ωe =ωr + s ωr , integrando si ottiene: θe =θ r +∫ s ωe dt .
Tramite un encoder si misura θr e si cerca di stimare s ωe .
L
1 i
Dalla trattazione svolta in precedenza si ricorda che s ω e= τ sT , dove τ r= r . Si ricorda ancora
r i
Rr
sΦ
che le due correnti corrispondono rispettivamente a quella lungo l'asse diretto e quella lungo l'asse
in quadratura.
Il valore τ r è stimato. C'è quindi il rischio che l'azionamento sia male implementato. La verifica va
effettuata comandando una determinata coppia. Se dopo un periodo (lungo) questa rimane tale
allora l'azionamento è ben realizzato.
Se viene effettuata una stima errata viene sommato di continuo un errore che continua a crescere
fino a determinare un errore sull'angolo e di conseguenza nell'orientamento di campo.
Vanno presi degli accorgimenti per rilevare ed eliminare questo tipo di errore.
http://www.damianozito.org
121
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 127: Schema di controllo vettoriale indiretto con CSI
Gli schemi a corrente impressa sono ormai fuori mercato ma è ancora possibile trovarli installati. Si
tratta di convertitori a corrente impressa, di solito ponti a tiristori, di cui si comanda l'angolo di
innesco.
La frequenza delle correnti di fase per la macchina viene determinata sulla base di calcolo di ωe
implementando un blocco Slip Calculator analogo a quello di schemi con CRPWM.
Viene poi calcolato il modulo desiderato per il vettore spaziale di corrente ∣i qds∣ . La corrente di link
viene retroazionata e l'errore tra le due entra in un regolatore di corrente la cui uscita comanda
l'angolo di innesco dei tiristori (per annullare l'errore).
Per migliorare le prestazioni durante i transitori viene implementata poi una rete anticipatrice.
http://www.damianozito.org
122
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 128: Rete anticipatrice per schema di
controllo vettoriale indiretto con CSI
In ingresso a tale rete vi è l'angolo del vettore spaziale di corrente e in uscita vi è la derivata nel
tempo di tale angolo. Il risultato è una velocità che si somma a ωr + s ω e . Quando il sistema è a
regime permanente la derivata è nulla quindi non si somma.
In altre parole la rete funziona per aumenti di coppia o diminuzioni di essa. Si guardi la Figura 128
e si pensi di comandare una coppia rispetto alla posizione 1 semplicemente aumentando I qs e
lasciando immutata la corrente lungo d. La rete anticipatrice sente la variazione dell'angolo e quindi
comanda l'incremento di velocità. Se la rete fosse assente lo schema di controllo comanderebbe un
nuovo vettore di corrente col modulo I qs2 ma di fase ϕ1 .
http://www.damianozito.org
123
Appunti di Azionamenti Elettrici a cura di Damiano Zito
5.2. Schemi di controllo vettoriale diretto
Figura 129: Schema di controllo vettoriale diretto con CRPWM
Lo schema che viene mostrato in questo paragrafo è solo di principio perché non è sufficiente
l'analisi in regime permanente. Viene svolta un'analisi sommaria.
Il valore dell'angolo θrf (che è sempre l'angolo del campo calcolato dal CFO), viene ricavato
mediante la misura di alcune grandezze del rotore. Viene quindi calcolato anche il modulo del
flusso e si realizzano due anelli in controreazione (di coppia e di flusso).
Dai due anelli si ricavano le due correnti su q e d desiderate. In particolare si ha la certezza di
determinare il flusso di magnetizzazione voluto attraverso la i d *, cosa che a catena aperta potrebbe
non verificarsi. Si riesce infatti a compensare l'errore sull'induttanza che non era possibile col
controllo indiretto. La i d è quella esatta, come lo è la corrente i q per la coppia.
Così come il controllo vettoriale indiretto, quello diretto può essere implementato con un CSI così
come mostrato in Figura 130.
http://www.damianozito.org
124
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 130: Schema di controllo vettoriale diretto con CSI
6. Controllo vettoriale: analisi a regime transitorio
Per effettuare lo studio di questa sezione si riscrivono le equazioni del modello in regime transitorio
per la macchina asincrona nel riferimento sincrono ( ω=ωe ). Si omette il simbolo di apice per la
notazione delle grandezze rotoriche e l'induttanza M ora è Lm.
{
{
{
{
v qs=R s i qs + p λ qs + ωe λds
;
v ds=R s i ds + p λ ds −ωe λ qs
0=R r i qr + p λ qr +(ω e−ωr ) λ dr ;
0=R r i dr + p λ dr −(ωe −ω r )λqr
λ qs=Lls i qs + L m (i qs +i qr )=L s i qs + L m i qr ;
λ ds=Lls i ds + L m (i ds +i dr )=L s i ds + L m i dr
λ qr=L lr i qr + L m (i qr +i qs )=L r i qr + Lm i qs ;
λ dr=L lr i dr + L m (i dr i ds )=Lm i ds+ Lr i dr
T e=
3 Lm
p
( λ i −λ i ) .
2 L r dr qs qr ds
http://www.damianozito.org
125
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Si impone adesso la condizione di orientamento del flusso di rotore lungo l'asse diretto:
λ dr =∣λ r∣ ; λqr =0 .
Questa scelta modifica le equazioni:
{
0=R r i qr +(ω e −ωr )λ dr ;
0=R r i dr + p λ dr
λ qr = Lr i qr + L m i qs=0 ;
T e=
3 Lm
p (λ i ) .
2 L r dr qs
L'espressione della coppia ricorda quella di una macchina DC Brushless.
Si ricava dalle espressioni appena scritte:
i qr =−
Lm
i ;
Lr qs
Ri
R L i
s ω e=(ω e −ωr )=− λr qr = r λm qs .
L r dr
dr
Si ricorda ora che nel regime permanente valeva:
s ω e=
R r I qs
.
Lr I ds
Osservando la seconda equazione che si è modificata, si nota che vale ancora il risultato trovato nel
regime permanente. Ovvero:
p λ dr =0 → i dr =0 .
Dall'espressione di λ dr trovata per il regime variabile, sostituendo i dr =0 , continua a valere il
valore di regime permanente λ dr = Lm I ds .
Si evince quindi che la corrente di rotore lungo d è nulla. In effetti, sempre nello studio a regime
L
permanente, si era giunti allo stesso risultato. Nella Figura 125 si può notare come I qr =−I qs m
Lr
sia allineata lungo q ed è l'unica componente rotorica.
Tuttavia nel regime variabile I dr≠0 e dall'equazione di λ dr vale:
i dr =
λ dr −L m i ds
.
Lr
Si mettono a sistema:
{
λ dr− Lm i ds
,
Lr
0=R r i dr + p λ dr
i dr =
http://www.damianozito.org
126
Appunti di Azionamenti Elettrici a cura di Damiano Zito
da cui si ricava
(Rr + pL r ) λ dr=R r Lm i ds .
Per capire il significato di questa espressione lavora nel dominio di Laplace. E quindi:
λ dr (s) Rr Lm
Lm
=
=
.
i ds (s ) Rr + sL r (1+ s τ r )
dove τ=
Lr
.
Rr
Figura 131: Andamento del flusso di rotore per un gradino di ids
Ciò vuol dire che nonostante il regolatore segua velocemente la corrente i ds il flusso di rotore varia
secondo la costante rotorica τ r .
Si riscrive l'equazione sostituendo l'espressione di λ dr :
(Rr + pL r )i dr=−L m p i ds .
Per un gradino di i ds risulta anche una variazione di i dr :
ids
idr
Figura 132: Andamento di idr per un
gradino di ids
In ultima analisi, essendo λ dr = Lm i ds + Lr i dr ci si aspetta un andamento come in Figura 133:
http://www.damianozito.org
127
Appunti di Azionamenti Elettrici a cura di Damiano Zito
ids
idr
λdr
Figura 133: Legame ids, idr e flusso
Ciò significa che il flusso tenderebbe ad inseguire la i ds ma a causa della i dr che circola nel rotore
per effetto dello stesso gradino questo varierà lentamente con la costante di tempo rotorica.
Figura 134: Diagramma del transitorio ids e flusso di
rotore
La Figura 134 riassume il concetto appena espresso dal punto di vista vettoriale.
http://www.damianozito.org
128
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 135: Diagramma vettoriale dei transitori di corrente iqs e iqr
Dall'analisi appena svolta e con l'aiuto dei due diagrammi vettoriali si evince quindi che se viene
variata la coppia T attraverso i qs anche i qr varierà istantaneamente e il flusso rimane costante. Se
invece si cerca di aumentare la coppia attraverso il flusso λ dr , anche la coppia avrà un andamento
che dipende dalla costante rotorica.
Nello schema di controllo l'anello di coppia varia quindi velocemente rispetto a quello del flusso. Si
riporta invece lo schema del modello (con orientamento di campo) che è stato analizzano in questa
ultima parte.
Figura 136: Schema di controllo di macchina asincrona con current
fed e orientamento di campo (la variabile p=s è quella di Laplace)
7. Controllo vettoriale: schemi di controllo
indiretti
Il controllo vettoriale indiretto per quanto già visto ricava la posizione del flusso di rotore legando
http://www.damianozito.org
129
Appunti di Azionamenti Elettrici a cura di Damiano Zito
la posizione meccanica alla relazione dello scorrimento. Si “aggiorna” il modello con le equazioni
viste per il regime transitorio.
Si è già trovata l'espressione s ω e=
Si sostituisce l'espressione λ dr =
R r L m i qs
.
Lr λ dr
Lm i ds
e quindi:
1+ τ r p
̃s ω e=(1/ τ r )
ĩqs
,
1
ĩ
1+ τ r p ds
si cerca cioè lo scorrimento desiderato stimando i valori ĩqs e ĩds . Si parte sempre da un flusso ed
una coppia desiderati:
λ̃
ĩds = dr ;
Lm
ĩqs =
T̃
.
3 Lm ̃
p
λ
2 L r dr
Supponendo un regolatore di corrente approssimabile con fdt ad anello chiuso unitaria lo schema
per ottenere flusso e coppia reali è il seguente.
lambda*
ids*
T*
iqs*
Ids = ids*
lambda
Lm / (1+tau_r p)
Wi(s)
Iqs = iqs*
T
3/2 p Lm/Lr
Figura 137: Stima di iqs e ids
Questo schema però prevede che per ogni variazione di flusso ci sia una variazione di coppia e ciò
per quanto studiato si vuole evitare perché altrimenti la risposta di coppia dipenderebbe dalla
costante rotorica (Figura 131).
L'analisi svolta in precedenza per il flusso viene “ribaltata” applicando il principio fisico di causaeffetto:
( Rr + pL r ) λ dr=R r Lm i ds ,
risolvendo quindi questa equazione rispetto a i ds (causa) si ha
i ds =
1
(1+ p τ r ) λ dr .
Lm
Matematicamente non cambia nulla ma dal punto di vista fisico questa relazione dice che se λ̃dr è
il flusso desiderato, τ̃r una buona stima, allora è possibile trovare la corrente i ds che assicura quel
http://www.damianozito.org
130
Appunti di Azionamenti Elettrici a cura di Damiano Zito
flusso. L'andamento è quello nella figura seguente.
λdr* = λdr
ids* = ids
Figura 138: Corrente ids per un gradino di flusso
È chiaro che nella realtà bisogna tenere conto del limite di massima corrente comandabile e il limite
in banda passante.
Il flusso quindi si avvicina al gradino ma sarà sempre soggetto alla costante di tempo rotorica.
Questo approccio consente una modifica allo schema precedente. Per cui al posto della corrente i ds ,
nel controllore l'ingresso sarà il flusso. Si semplifica anche la relazione sullo scorrimento:
s ωe =
R r L m i qs
,
Lr λ dr
quindi il controllo si ottiene implementando lo schema in Figura 139.
http://www.damianozito.org
131
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 139: Schema a blocchi con scorrimento e flusso desiderati
Lo schema completo è in Figura 140:
Figura 140: Controllo vettoriale indiretto, schema di controllo
http://www.damianozito.org
132
Appunti di Azionamenti Elettrici a cura di Damiano Zito
8. Controllo vettoriale: schemi di controllo diretti
Nella Figura 129 è stato introdotto uno schema di principio per il controllo diretto. L'attenzione
adesso si focalizza sul blocco CFO (Computer Field Orienter) e sui modelli che vengono in esso
implementati per raggiungere lo scopo.
L'obiettivo naturalmente è quello di determinare il flusso e la sua fase per poter orientare il sistema
qdo e dunque l'asse d con il flusso rotorico.
Poiché non si dispongono informazioni sul flusso, la condizione λ qr =0 non è più valida. Si
effettuano quindi le misure e si ricava, nel riferimento di statore, il modulo
λ r =√(λ sdr )2 +(λ sqr ) 2 ,
da cui si può ricavare la fase, cioè l'angolo,
s
θr =arctan
λ dr
s .
λ qr
La funzione arctan però non è facile da implementare, quindi si utilizza un PLL.
8.1. Misura del flusso al traferro
Per questo tipo di controllo esistono vari metodi utili a determinare il flusso. Uno tra questi consiste
proprio nella misura stessa del flusso al traferro mediante sensori ad effetto-hall o mediante bobine
di pick-up27. Per cui si ricava il flusso dalla tensione indotta e dalla frequenza. Queste ultime
presentano uno svantaggio a frequenze quasi nulle per cui risulta fem indotta pari a zero.
Questi trasduttori misurano quindi il flusso al traferro che può essere chiamato λ m .
Si può scrivere nel riferimento statorico il vettore spaziale:
s
s
s
s
s
λ qdm=λqm− j λ dm= Lm ( i qds + i qdr ) .
Infatti per un riferimento arbitrario valgono le equazioni scalari:
λ qm=L m (i qs+i qr ) ; λ dm=L m (i ds+i dr ) .
Siccome la pulsazione ω non compare in queste equazioni, valgono anche nel sistema di
riferimento con lo statore.
Per cui:
{
λ sqm=L m (i qss +i sqr ) ,
λ sdm=L m (i dss +i sdr )
a conferma di quanto scritto sopra.
Si mettono a sistema i vettori spaziali del flusso magnetico e del flusso di rotore cercato (riferito
allo statore):
27 Si tratta di bobine a vuoto, sulle quali non circola corrente.
http://www.damianozito.org
133
Appunti di Azionamenti Elettrici a cura di Damiano Zito
{
s
λ sqdm− Lm i qds
s
λ qdm
=L m (i sqds +i sqdr ) →
Lm
.
s
s
s
λ qdr =L r i qdr + L m i qds
L̂ r
ŝ
s
s
λ qdr = ̂ λ qdm −( L̂ r − L̂m)i qds
Lm
i qdr=
{
( )
Per ricavare il valore la stima di λ qdr nelle coordinate statoriche:
•
s
si misura la corrente di statore ( i qds
);
•
si misura il flusso al traferro ( λ sqdm );
•
si stimano i valori di L r , L m .
Quindi si ricava il modulo a partire da λ q e λ d e la fase attraverso l'arcotangente.
L'osservatore del flusso è quindi a catena aperta. Questo tipo di controllo va verificato per diverse
correnti infatti c'è il rischio che l'induttanza di dispersione Llr diminuisca troppo nel caso di cave
rotoriche chiuse, mentre se non c'è molta saturazione può essere considerata costante. Stimare poi
L r e L m non è facile in quanto trattasi di valori molto piccoli.
8.2. Modello in tensione
Un altro metodo consiste nel ricavare il flusso di rotore mediante la misura delle tensioni di statore.
Dalle equazioni:
{
d λq
+ω λ ds
dt
,
d λd
v ds =R s i ds +
−ω λ qs
dt
v qs =R s i qs +
si ricava il vettore equivalente in forma complessa ( v qds =v qs− j v ds )28:
v qds =R s i qds +
d λ qds
+ j ω λ qds .
dt
Si faccia caso al fatto che per una corretta rappresentazione si moltiplica il termine ω λ qds per
l'unità immaginaria in modo tale da avere
j ω (λ qs – j λds )= j ω λ qs + ω λ ds .
Per capire il motivo basta guardare l'equazione di v qs che rappresenta la parte reale (Re) in cui
appare il flusso λ ds , mentre λ qs si trova nell'equazione (-Im).
Nel riferimento stazionario si impone ω=0 . Per cui:
v qds =R s i qds + d λ qds .
Si ricava il flusso rispettivo per definizione:
28 Si considera vqs = (Re), mentre vds = (- Im)
http://www.damianozito.org
134
Appunti di Azionamenti Elettrici a cura di Damiano Zito
t
λ
s
qds
s
s
=∫ ( v qds −R i qds ) dt .
o
In un riferimento generico vale λ qds =L s i qds + Lm i qdr .
Si ricava quindi la corrente:
s
i qdr
=
s
λqds
− Ls i sqds
.
Lm
Quindi nella relazione λ dqr = Lm i dqs + L r i qdr si sostituisce il valore appena ricavato:
s
s
λ −L s i qds
λ dqr = Lm i dqs + L r qds
,
Lm
[ ( )]
2
L
L
s
λ dqr = m λqds
− L s− m i sqds .
Lr
Lr
Anche in questo caso si incontrano delle difficoltà relative soprattutto al contributo in parentesi
tonda che costituisce la reattanza transitoria del circuito di statore.
Questo modello, detto “in tensione”, non lavora bene per frequenze basse. Ovvero per quelle
frequenze per cui la tensione diventa confrontabile con la caduta resistiva, caso per cui è facile
commettere un grande errore che viene poi integrato.
8.3. Modello in corrente
Si utilizza altrimenti il modello “in corrente”. Analogamente al caso precedente si parte dalle
equazioni di rotore:
{
d λqr
+(ω−ω r )λdr
dt
,
d λdr
0=R r i dr +
−(ω−ωr )λ qr
dt
0=R r i qr +
per ricavare il vettore:
v qdr =0= Rr i qdr +
d λ qdr
+ j (ω−ωr )λ qdr .
dt
Si sceglie un sistema di riferimento per cui ω=ωr . Ne segue che:
{
d λ qrR
.
dt
R
R
R
λ qdr =L m i qds + L r i qdr
v Rqdr =0=R r i qdr +
R
L'incognita è la i qdr
:
http://www.damianozito.org
135
Appunti di Azionamenti Elettrici a cura di Damiano Zito
{
R
1 d λ qr
+
Rr dt
.
Lr d λ qrR
R
R
λ qdr =L m i qds − +
Rr dt
i qdr =−
Infine:
R
R
λ qdr (1+ τ r s)= Lm i qds ,
λ Rqdr =
Lm
i Rqds .
(1+τ r s)
Bisogna quindi riferire la corrente di statore al rotore attraverso una matrice KR per cui è richiesta la
misura della posizione angolare meccanica del rotore per conoscere l'angolo θr . Ciò non è un
problema perché il trasduttore di posizione (o di velocità) è sempre presente nell'azionamento e
viene infatti utilizzato per chiudere l'anello di velocità esterno a quello di coppia.
8.4. Modello ibrido
I due modelli appena descritti si implementano in un modello ibrido come in figura.
Figura 141: Modello Ibrido per il controllo vettoriale diretto
Come si è visto in precedenza il modello in tensione lavora male alle basse frequenze mentre è più
preciso alle alte velocità. Al contrario,il modello in corrente è molto preciso allo spunto e quindi a
basse velocità.
Queste caratteristiche vengono sfruttate per stabilire la transizione per il funzionamento dell'uno o
dell'altro osservatore.
Per fare ciò si deve scegliere una banda passante per il regolare PI (di transizione) il quale analizza
l'errore proveniente da entrambe le tipologie di osservatori.
http://www.damianozito.org
136
Appunti di Azionamenti Elettrici a cura di Damiano Zito
Figura 142: Diagramma di Bode di un regolatore PI con Kp = Ki = 1
La Figura 142 mostra il diagramma di Bode per il regolatore PI i cui coefficienti proporzionali sono
unitari. Nel caso pratico si deve scegliere la frequenza di taglio
K
1
f t= τ = p ,
PI
Ki
oltre la quale il regolatore attenua il segnale in ingresso.
All'interno della banda passante le grandezze in gioco variano con frequenza molto bassa e quindi
l'errore ε sarà nullo. Ne segue che la stima del flusso di rotore è pari a quella eseguita dal modello in
corrente.
Quando aumenta la frequenza, perché aumenta la velocità, si esce fuori dalla banda passante del
regolatore, la cui uscita subirà quindi un'attenuazione. Pertanto il termine di correzione in uscita al
PI tende a zero.
Si conclude che indipendentemente dall'errore ε, i risultati del modello in corrente non sono più
presi in considerazione: la stima del flusso è stabilita solamente dalle operazioni del modello in
tensione.
In generale il valore della frequenza di taglio dipende dalla bontà della stima dei parametri induttivi
e resistivi, e dalle loro variazioni nel funzionamento della macchina.
http://www.damianozito.org
137