AIAS – ASSOCIAZIONE ITALIANA PER L’ANALISI DELLE SOLLECITAZIONI
42° CONVEGNO NAZIONALE, 11-14 SETTEMBRE 2013, UNIVERSITÀ DEGLI STUDI DI SALERNO
AIAS 2013 - 171
MODELLAZIONE E PROTOTIPAZIONE DI ATTUATORE ROTATIVO
CONTINUO A FILI A MEMORIA DI FORMA
G. Scirè Mammanoa, E. Dragoni
a
Università degli Studi di Modena e Reggio Emilia - Dipartimento di Scienze e Metodi
dell’Ingegneria, Via Amendola n°2, Pad. Morselli, 42122 Reggio Emilia, e-mail: [email protected]
Sommario
Il lavoro propone lo sviluppo di un motore rotativo continuo basato su fili a memoria di forma.
L’architettura del dispositivo proposto utilizza uno o più tamburi in materiale antifrizione su cui è
avvolto e striscia un filo a memoria. Il contrasto dell’elemento attivo è garantito da una molla a lamina
che fornisce una forza di riarmo quasi costante. L’attivazione e la conseguente contrazione dei fili
SMA generano sul tamburo un momento torcente che è trasmesso all’albero mediante l’interposizione
di una ruota libera (cuscinetto unidirezionale). In questo modo nella fase di riarmo del filo l’albero è
svincolato dal tamburo e il suo moto risulta continuo e intermittente. Il moto retrogrado accidentale è
impedito da una seconda ruota libera che collega l’albero al telaio. Insieme alla modellazione quasistatica del dispositivo, il lavoro presenta un prototipo di attuatore a tre tamburi con banco freno
integrato. Si riportano i risultati sperimentali utili per la validazione del modello e per la valutazione
delle prestazioni dinamiche del dispositivo proposto.
Abstract
The paper presents the conceptual design, modeling and prototyping of a novel rotary motor based on
shape memory alloy (SMA) wires. The basic architecture of the device capitalizes on a SMA wire
wound round a low-friction cylindrical drum. The backup force to the SMA wire is provided by a
beam spring which generates a nearly-constant force tangential to the drum. The electrical activation
of the wire produces a contraction of the wire, hence a rotation of the drum fitted to the shaft through a
free wheel (unidirectional bearing). Thanks to the free wheel, during the backup phase (recoiling of
the wire), the drum rotates backward while the shaft does not move. Spurious backward movements of
the shaft are contrasted by a second free wheel linking the shaft to the frame. The paper presents a
model for the quasi-static simulation of the motor and the experimental characterization of a prototype
device featuring three active drums, a rotary sensor and an angular brake to apply the external load.
Parole chiave: Attuatore, Rotativo, Continuo, Fili, SMA, Memoria di forma, Ruote libere
1. INTRODUZIONE
L’utilizzo delle leghe a memoria di forma (SMA Shape Memory Alloy) per la realizzazione di
dispositivi di attuazione angolare è una tematica di ricerca su cui molti autori stanno lavorando.
La principale difficoltà nel realizzare questi dispositivi risiede nel fatto che il modo più efficiente di
utilizzare il materiale attivo SMA è a trazione (fili). In ogni caso, anche facendo lavorare il materiale a
torsione (molle elicoidali), l’elemento è in grado di fornire una forza e non direttamente una coppia.
Tale forza deve quindi essere convertita in una coppia angolare mediante un cinematismo [1-5].
Una seconda difficoltà risiede nella generazione di moti rotativi continui, in quanto la forza generata
dall’elemento lineare SMA è intermittente (attivazione, riarmo). In questi casi il meccanismo di
trasformazione del moto lineare in rotativo è più complesso [6-7].
42° CONVEGNO NAZIONALE – SALERNO, 11-14 SETTEMBRE 2013
In questo lavoro si propone una nuova architettura di attuatore rotativo continuo, caratterizzata da una
maggior semplicità rispetto alla maggioranza delle soluzioni esistenti e da un elevato grado di
modularità.
La soluzione, descritta nel prossimo paragrafo, si basa sull’attuatore a filo avvolto proposto da Song
[8] nella versione rotativa, opportunamente modificato al fine di rendere il moto rotativo continuo.
2. ARCHITETTURA ATTUATORE ROTATIVO CONTINUO
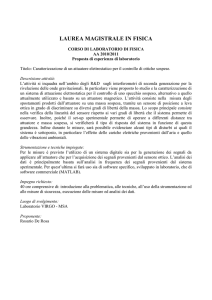
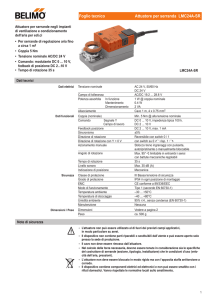
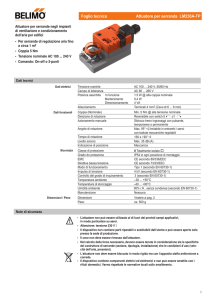
L’architettura del dispositivo ipotizzato (Fig. 1) è composta da un albero S vincolato ad un telaio fisso
F mediante una ruota libera FW1, che ne consente la rotazione solo in senso orario. Sull’albero è
inoltre calettata una seconda ruota libera FW2, orientata con il medesimo senso di rotazione (orario)
della ruota libera FW1. Sull’anello esterno della ruota libera FW2 è bloccato per interferenza un
tamburo in materiale antifrizione su cui è avvolto un filo W a memoria di forma i cui estremi sono
vincolati rispettivamente al mantello del tamburo D e a telaio F. Il filo W è avvolto sul tamburo in
senso orario e una sua contrazione provoca una rotazione in senso orario del tamburo D.
La rotazione oraria del tamburo si traduce in una rotazione dell’albero S in quanto è nel verso di
bloccaggio della ruota libera FW2 e nel verso libero della ruota FW1.
Sul tamburo D insiste anche una molla di compressione CS, che ha la funzione di generare una coppia
antioraria sul tamburo, utile a contrastare il filo SMA. La coppia generata dalla molla deve essere
sufficiente a ruotare in senso antiorario il tamburo, vincendo la resistenza passiva del filo quando
questo è in stato disattivo. La rotazione antioraria del tamburo è consentita della ruota libera FW2 e,
grazie all’azione della ruota libera FW1 che ne impedisce la rotazione antioraria, l’albero S rimane
fermo durante questa fase.
Il ciclo di funzionamento del dispositivo è molto semplice e prevede due fasi. Nella prima fase, il filo
SMA in stato deformato è riscaldato per effetto Joule sopra alla temperatura Af di trasformazione
martensite-austenite. Cambiando di fase, il filo si contrae, striscia sul tamburo e genera una forza
capace di vincere l’azione di contrasto della molla CS, provocando la rotazione oraria del tamburo e
conseguentemente quella dell’albero S. Nella seconda fase, disattivando il riscaldamento del filo si
induce la trasformazione inversa austenite-martensite e conseguentemente si ottiene un rilassamento
della forza del filo a causa della diminuzione del modulo elastico del materiale. La coppia erogata
dalla molla CS è quindi maggiore di quella generata dal filo, producendo la rotazione antioraria del
tamburo e la conseguente deformazione (riarmo) del filo SMA, che così è pronto per compiere un
nuovo ciclo.
Ripetendo la sequenza appena descritta si ottiene una rotazione unidirezionale dell’albero. L’insieme
del filo SMA W, della molla di contrasto CS, del tamburo D e della ruota libera FW2 rappresenta
l’unità modulare di attuazione.
Modulo
FW1
D
FW2
S
CS
W
F
Fig. 1 – Schema costruttivo dell’attuatore rotativo Fig. 2 – Attuatore rotativo continuo con
continuo
architettura a 3 moduli
42° CONVEGNO NAZIONALE – SALERNO, 11-14 SETTEMBRE 2013
L’architettura può quindi essere espandibile a piacimento inserendo più moduli sul medesimo albero,
come visibile in Fig. 2. A seconda della modalità di attivazione e della logica di funzionamento
implementata, i moduli possono essere serializzati o parallelizzati. Nel primo caso i moduli vengono
attivati in modo sequenziale, ottenendo un funzionamento meno intermittente, fino ad uniforme. Nel
secondo caso i moduli sono attivati contemporaneamente, ottenendo un incremento proporzionale
della coppia erogata dall’attuatore. Ovviamente in funzione del numero di moduli implementati si
possono fare anche delle combinazioni intermedie, con parte di moduli attivate in serie e parte in
parallelo, oltre a sovrapporre le varie fasi di funzionamento, agendo sul tempo di sfasamento tra le
stesse.
3. MODELLAZIONE DELL’ ATTUATORE
In questa sezione si presenta il modello analitico macromeccanico per l’attuatore rotativo continuo di
Fig. 1, utile per la previsione della corsa angolare erogata dal singolo modulo in funzione del carico
esterno applicato.
In un recente passato gli autori hanno sviluppato un modello analitico utile per il calcolo della corsa
angolare [9] per un caso molto simile a quello in esame in questo lavoro in cui il contrasto del filo era
effettuato da una forza costante. Tale modello viene qui ripreso ed adattato al caso in esame in cui il
contrasto è realizzato mediante un elemento elastico e l’attuatore debba vincere un carico esterno.
Il calcolo della corsa del dispositivo si fonda sulla valutazione dello stato di deformazione, e quindi di
deflessione del filo nei due stati estremi di trasformazione della lega, ossia in stato completamente
martensitico e completamente austenitico. Ogni altro stato intermedio di trasformazione non è
considerato dal presente modello. Inoltre il modello presuppone un comportamento elastico lineare in
stato austenitico e pseudoplastico bilineare in stato martensitico [10].
Come ormai assodato, la corsa erogata da un attuatore a memoria di forma è tanto maggiore quanto
meno rigido in senso algebrico è il sistema di contrasto [10]. I risultati migliori si ottengono infatti con
sistemi di compensazione che attuano rigidezze di contrasto negative [10].
Per il caso in esame, non volendo introdurre sistemi di compensazione elastica, cercheremo di
realizzare un sistema di contrasto che si avvicini il più possibile al contrasto a forza costante (rigidezza
nulla). Per far ciò si propongono (paragrafo 4.1) degli elementi elastici di contrasto che forniscono al
contempo un alto valore di precarico e una bassa rigidezza.
Ipotizzando quindi di inserire un elemento di contrasto a rigidezza trascurabile, il filo sperimenta una
forza e quindi una tensione costante sia nella fase di attivazione che in quella di disattivazione. Il
valore della tensione non è però uguale nei due casi. Nella fase di attivazione infatti, alla coppia
supposta costante generata della molla Cb ( Cb Fb rb con Fb forza supposta constante della molla e rb
raggio del braccio della molla), si somma la coppia applicata all’attuatore dal carico esterno CL e la
coppia CFW1 necessaria a far ruotare la ruota libera FW1 (Fig. 1), per cui la tensione sperimentata dal
filo in stato austenitico vale 1:
1
Cb CL CFW 1
R A
(1)
in cui R è il raggio di avvolgimento del tamburo e A è la sezione del filo. In stato martensitico invece,
la tensione applicata al filo 0 vale:
0
Cb CFW 2
R A
(2)
con CFW2 coppia necessaria a far ruotare la ruota libera FW2.
Il modello proposto in [9] risulta dunque ancora valido per quel che concerne l’intera parte di
deformazione del filo in stato disattivo, purchè si utilizzi come tensione applicata al filo 0 quella
calcolata tramite la (2). In particolare l’allungamento del filo risulta ancora:
42° CONVEGNO NAZIONALE – SALERNO, 11-14 SETTEMBRE 2013
Lm
R 0
f Ema
sm 1 f g
f
z f g 1 0 g
1 e A
e
s
m
(3)
in cui Ema è il modulo elastico del materiale SMA in stato martensitico, sm (=Emb/Ema) caratterizza il
comportamento elastoplastico del materiale in stato martensitico rispetto al corrispondente
comportamento elastico, f è il coefficiente di attrito fra filo e tamburo, z è il rapporto tra la tensione di
snervamento g del materiale in stato martensitico e la tensione applicata 0, A è l’angolo totale di
avvolgimento mentre g è l’angolo di avvolgimento per cui si ha snervamento del materiale. Tale
angolo è calcolabile mediante la seguente formula:
g min ln z f z 1 , A
(4)
Nell’espressione (3) e (4) e nel prosieguo del lavoro si utilizza l’operatore booleano expression che
vale 1 o 0 a seconda che l’espressione contenuta al suo interno sia vera o falsa. Per maggiori dettagli
sull’intera trattazione si rimanda a [9].
In stato attivo, il procedimento per il calcolo del recupero non cambia rispetto a quello utilizzato in
[9], purché si consideri per il calcolo della tensione c lungo il filo durante il recupero, la tensione 1
precedentemente calcolata tramite la (1):
c 1e f
(5)
Eseguendo i passaggi proposti in [9] applicati al caso di attuatore rotativo si ottengono le seguenti
formule per il calcolo degli angoli limite lim e della corsa angolare nei due possibili scenari di
funzionamento:
1 1
4sm 1 z 2 s1 0 sm 12
zs
s
1
s
ln
1
0
m
1
0
lim1 min f 2sm 1
A
s1 0
1
f
1
1 e f lim1 z f sm 1 lim1
1 1 e lim1
f Ea
sm
1 s1 0
ln
, A
2
f
1
1
f Ea
s1 0
f
f
sm 1 1 z ln z 1 0 g
1 1 e lim 2 s1 0 1 e lim 2
s
m
(7)
(8)
lim 2 min
2
(6)
(9)
dove Ea è il modulo elastico del materiale SMA in stato austenitico e s1 (=Ea/Ema) è un coefficiente che
rappresenta la capacità di memoria di forma della lega.
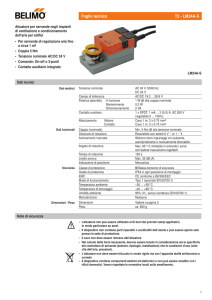
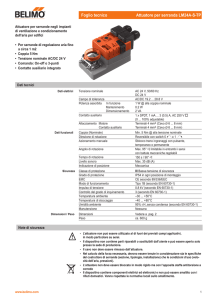
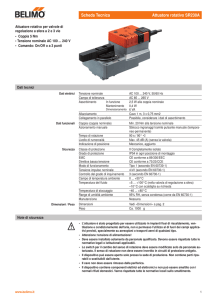
Infine applicando la sequenza di calcolo proposta in Fig. 3 si ottiene la corsa angolare del modulo.
4. DIMENSIONAMENTO DELL’ATTUATORE PROTOTIPO E APPARATO DI PROVA
Dell’architettura proposta è stato realizzato un prototipo fisico di laboratorio, al fine di valutarne le
prestazioni e validare il modello sviluppato.
4.1.Progettazione architettura attuatore
L’attuatore rotativo proposto ha un architettura di tipo modulare, facilmente serializzabile o
parallelizzabile. Nel caso specifico la scelta è ricaduta sulla realizzazione di un prototipo funzionale a
42° CONVEGNO NAZIONALE – SALERNO, 11-14 SETTEMBRE 2013
INIZIO
1600
Calcola
g (4), Lim1 (6), lim2 (8)
1400
1200
Y
< lim1 ≤ g
(MPa)
Calcola
Lm (3)
800
Austenite
600
N
Martensite
400
Calcola
2 (9)
Calcola
1 (7)
1000
200
0
0.0
1.0
2.0
e
3.0
4.0
5.0
(%)
FINE
Fig. 3 – Diagramma di flusso per il calcolo della Fig. 4 – Diagramma sperimentale di trazione del
corsa angolare del singolo modulo dell’attuatore. filo SmartFlex® da 0.150mm di Saes Getters
3 moduli, azionati in sequenza al fine di migliorare la regolarità di funzionamento e aumentarne la
velocità di rotazione. La morfologia è quindi del tutto simile a quella illustrata in Fig. 2.
Per facilitare la caratterizzazione sperimentale, si è deciso di integrare nel prototipo i sensori e i
dispositivi utili per la verifica e la rilevazione delle prestazioni del dispositivo. In particolare sono stati
integrati un sensore di posizione angolare e un freno a coppia regolabile.
Nel paragrafo seguente si riporta la progettazione dei principali componenti.
I fili a memoria di forma sono riscaldati per effetto Joule da una scheda elettronica dedicata, che
implementa un controllo in retrazione della corrente che li attraversa. Il valore di corrente desiderato è
impostabile dall’esterno mediante un segnale di tensione proporzionale (1A/V) generato dalla scheda
di acquisizione USB 6251 della National Instruments che gestisce l’intero prototipo grazie ad un
applicativo dedicato sviluppato in ambiente LabView. I tre fili a memoria di forma sono collegati
elettricamente in parallelo e ogni filo è comandato da un transistor N-mos in saturazione che funge da
interruttore dello stesso filo. I tre transistor sono a loro volta pilotati dalla scheda di acquisizione
mediante tre uscite digitali 0-5V. Come anticipato la modalità di alimentazione dei fili SMA è
sequenziale per cui nonostante siano in parallelo elettrico solo un filo alla volta viene riscaldato.
4.2. Dimensionamento modulo
Come prima esposto il modulo base di attuazione è formato da 3 dispositivi principali: il filo SMA
avvolto, la ruota libera e l’elemento elastico di contrasto.
Il filo SMA utilizzato è lo SmartFlex di diametro 0.15mm prodotto dalla SAES Getters, il cui
diagramma di trazione per le due fasi cristalline è mostrato in Fig. 4. Dalle due curve sono stati
ricavati i parametri caratteristici del materiale utili per la modellazione dell’attuatore (Ema=8GPa,
g=35MPa, s1=5.62, sm=0.4). Il filo è avvolto per un totale di 1.5 spire su un tamburo di diametro
20mm (Fig. 5), per una lunghezza avvolta di circa 94mm. Un estremo del filo è vincolato al tamburo
mediante un crimp elettrico inserito radialmente in un foro praticato sul mantello del tamburo.
L’estremo non avvolto è invece vincolato sempre mediante l’utilizzo di un crimp elettrico nella zona
inferiore del telaio. Complessivamente il filo ha una lunghezza di circa 120mm.
Le ruote libere dei tamburi FW2, così come la ruota libera a telaio FW1, sono della NBS, modello
HF0812, con diametro dell’albero di 8mm, diametro esterno di 12mm e lunghezza assiale 12mm.
42° CONVEGNO NAZIONALE – SALERNO, 11-14 SETTEMBRE 2013
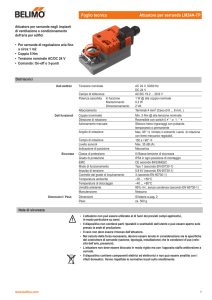
FW2
Freno
Tamburo
Sensore Angolare
Magnete
FW1
Giunto
Molla a lamina
Albero
Giunto
Filo SMA
Piano Telaio
Telaio
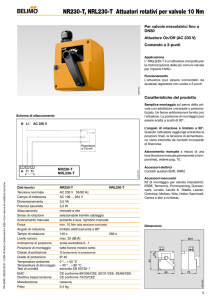
Fig. 5 – Modello CAD 3D del prototipo di attuatore rotativo continuo completo di banco freno.
Il costruttore delle ruote libere non fornisce alcun valore circa la loro coppia di trascinamento.
L’albero dell’attuatore è invece un albero in alluminio rettificato in tolleranza h8.
Per di ridurre al minimo la rigidezza dell’elemento di contrasto si è deciso di utilizzare come elemento
elastico antagonista dei fili SMA, delle semplici molle a lamina [11]. Questi elementi sono costituiti
da lamine di lunghezza e sezione opportuna, caricate di punta oltre il loro carico critico (instabilità
elastica). La caratteristica interessante di questi elementi è che oppongono una elevata forza per essere
deflesse fino a quando non raggiungono il loro carico critico. Successivamente, se si continua la loro
compressione questi elementi presentano un basso valore di rigidezza, lasciandosi deformare a forza
quasi costante. Sono quindi idonei a realizzare elementi elastici ad alto precarico e bassa rigidezza. Un
ulteriore vantaggio di questa soluzione è la possibilità di prototipare in modo molto semplice e veloce
elementi elastici dalle caratteristiche personalizzate, con il solo ausilio di fogli metallici e di una cesoia
per il loro taglio. In [11] si fornisce la procedura per il corretto dimensionamento di questi elementi,
noti che siano i valori di precarico e rigidezza desiderati e il materiale costituente le lamine.
Le lamine sono collegate ai tamburi mediante perni di acciaio con incavo a “V”, inserito in un foro
radiale praticato sul mantello del tamburo. Il collegamento a telaio avviene mediante una scanalatura
ancora con incavo a “V”. Le scanalature a “V” hanno la funzione di realizzare di fatto una cerniera
piana, che permetta la sola rotazione dell’estremo della lamina sul piano di massima flessibilità. Il
raggio del braccio delle lamine rispetto l’asse di rotazione dell’albero è rb=10.25mm.
Nel caso in esame, per garantire una deformazione in stato martensitico del 4%, a cui corrisponde una
tensione 4% di circa 155MPa (Fig. 4 curva martensite) il precarico della molla P0 deve essere pari
2.65N (P0=R∙4% ∙Afilo/rb). Per quel che concerne la freccia che la lamina subirà, questa può essere
desunta sommando all’allungamento del filo avvolto calcolabile tramite la (3) (Lm=3.56mm)
l’allungamento della porzione di filo non avvolto che vale LLibero=(120-94)∙0.04=1.05mm. In via
cautelativa si fissi una freccia massima di lavoro di 5mm. Nota la freccia massima e la distanza d,
ricavabile dal modello CAD (d=20mm), fra l’albero di uscita dell’attuatore e il piano del telaio (Fig. 5)
si ricava la lunghezza libera che dovrà avere la lamina pari a circa 23mm.
Le lamine del prototipo sono realizzate in acciaio al carbonio, con modulo elastico E=190.7GPa. I
fogli disponibili commercialmente hanno diversi spessori con passo di 0.05mm in 0.05mm. Per
spessori fra 0.05 e 0.15 mm si può ritenere una tensione ammissibile del materiale adm=1400MPa.
Inserendo questi dati nella procedura di dimensionamento delle molle a lamina proposta in [11] è
possibile ricavare una serie di molle, diversificate per lunghezza della lamina l e rigidezza k0, che
garantiscano il corretto precarico e la freccia richiesta. Con una procedura iterativa di variazione della
rigidezza di progetto k0, è possibile individuare la molla che abbia la lunghezza di progetto di 23mm.
La molla definitiva individuata ha una rigidezza di 0.061N/mm, uno spessore della lamina di 0.1mm e
una larghezza di 8.46mm.
42° CONVEGNO NAZIONALE – SALERNO, 11-14 SETTEMBRE 2013
3.5
300
3.0
250
Martensite
1
2.5
200
(MPa)
P (N)
Austenite
2.0
1.5
150
0
100
1.0
50
0.5
0
0.0
0
1
2
3
4
f (mm)
5
0 eA(1) 1
2
3 eM(0)
4
e (%)
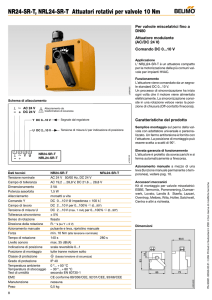
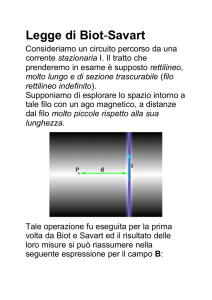
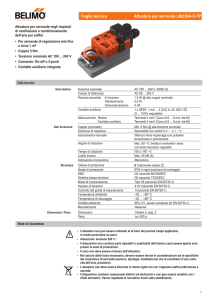
Fig. 6 – Diagramma sperimentale forza – Fig. 7 – Schema per il calcolo del recupero
deflessione della molla a lamina del modulo
angolare dovuto alla porzione di filo non avvolto
La molla a lamina è stata quindi realizzata e caratterizzata sperimentalmente mediante una prova di
compressione al dinamometro i cui risultati sono visibili in Fig. 6. Come si osserva dal diagramma, a
metà della freccia di progetto (2.5mm), la molla ha una forza pari a quella di progetto di 2.65N.
4.3. Apparato di prova dell’attuatore
Per facilitare la caratterizzazione sperimentale, l’attuatore è stato integrato da un sensore di posizione
angolare assoluto del tipo “senza contatto” (Penny+Giles NRH280DP). Il sensore visibile in Fig. 5 è
fissato a telaio e si affaccia su un magnete polarizzato calettato direttamente sull’albero dell’attuatore
mediante un giunto ad interferenza in materiale plastico, in modo da rilevarne la rotazione. La lettura
del sensore è garantita dalla scheda di acquisizione e dal software dedicato sviluppato in LabView.
Inoltre l’attuatore è corredato da un freno ad isteresi magnetica (Fig. 5) della ditta Mobac, modello
HB3M-2, capace di una coppia nei due sensi fino a 20Nmm. La tecnologia dell’isteresi magnetica
garantisce coppie di trascinamento molto basse e coppia frenante proporzionale alla corrente di
alimentazione. Come il sensore, anche il freno è calettato direttamente sull’albero di uscita.
5. CARATTERIZZAZIONE SPERIMENTALE DEL PROTOTIPO E CONFRONTO COL MODELLO
La caratterizzazione sperimentale del prototipo ha visto l’esecuzione di tre diverse modalità di prova,
due inerenti il singolo modulo e una riguardante l’intero attuatore.
La prima modalità ha l’obiettivo di determinare la corsa angolare del singolo modulo al variare della
coppia esterna applicata dal freno. I livelli di coppia imposta sono 0 (attuatore a vuoto), 5, 10, 15,
20Nmm.
L’angolo di rotazione, rilevato dal sensore di posizione angolare, è misurato a partire dalla condizione
di filo in stato martensitico (freddo) fino al raggiungimento della posizione di equilibrio a
trasformazione completata (caldo). Il riscaldamento è effettuato con una corrente costante di 800mA.
La rotazione rilevata è quindi stata confrontata con la previsione del modello analitico. Questa può
essere desunta sommando alla corsa calcolata mediante il procedimento riassunto in Fig. 3, la
corsa angolare Libero dovuta al recupero della porzione di filo non avvolto:
Tot Libero
(10)
La porzione di filo non avvolta lLibero è per l’attuatore in prova 26mm. Il recupero angolare Libero
imputabile a detta porzione è calcolabile dal modello del materiale SMA, note che siano le tensioni
nella fasi di deformazione 0 e di recupero . Con riferimento alla Fig. 7 tale rotazione vale:
42° CONVEGNO NAZIONALE – SALERNO, 11-14 SETTEMBRE 2013
20
30
Angolo Rotazione Modulo (°)
Angolo Rotazione Modulo (°)
Analitico
25
Sperimentale
20
15
10
5
15
10
0 Nmm
5 Nmm
5
10 Nmm
15 Nmm
20 Nmm
0
0
0
5
10
15
Coppia Frenante (Nmm)
20
0
5
10
Tempo (s)
15
20
Fig. 8 – Angolo rotazione del singolo modulo in Fig. 9 – Risposta al gradino di corrente
funzione della coppia frenante: confronto dell’attuatore per diversi valori di coppia frenante
modello analitico e risultati sperimentali
applicata
Libero
1
lLibero
l
1 sm
e M 0 e A 1 Libero 0 1
1 z 0 g
R
Ema R
s1
sm
(11)
In Fig. 8 si riporta il confronto tra il modello analitico e i risultati sperimentali ottenuti sul prototipo.
La seconda prova prevede di alimentare il singolo modulo dell’attuatore con un gradino di corrente di
800mA e di registrare l’evoluzione dell’angolo di rotazione dell’albero, per diversi valori di coppia
frenante applicata (gli stessi della prova precedente). In questo modo si valuta la prontezza di risposta
e la dinamica dell’attuatore. In Fig. 9 si riportano i risultati ottenuti.
La terza ed ultima modalità di prova ha invece l’obiettivo di valutare, sempre per i medesimi livelli di
coppia applicata, la velocità media di rotazione dell’attuatore, al variare del tempo di alimentazione
tfase di ogni singolo modulo.
Le prove sono realizzate alimentando i singoli moduli in sequenza per un tempo pari a tfase e con una
corrente costante di 800mA. In questo modo in ogni istante un solo modulo risulta alimentato, e ogni
modulo ha un tempo pari a 2∙tfase per il raffreddamento. La velocità di rotazione è ricavata misurando il
tempo impiegato per una rotazione completa dell’albero. Si sottolinea che all’inizio di ogni prova tutti
i fili si trovano a temperatura ambiente. In Fig. 10 sono visibili i risultati ottenuti per questa prova.
6. DISCUSSIONE
L’attuatore rotativo continuo realizzato (Fig.11) ha una struttura semplice e modulare. Il modulo base
è composto da un filo avvolto su un tamburo antifrizione calettato sull’albero mediante una ruota
libera e da una molla di contrasto a bassa rigidezza. Intervenendo esclusivamente sulla logica di
alimentazione dei singoli moduli è possibile ottenere un attuatore serializzato (moduli attuati in
sequenza) o parallelizzato (moduli attuati contemporaneamente). Nel primo caso si ottiene una
migliore regolarità di funzionamento, nel secondo caso un aumento della coppia erogata.
L’utilizzo di molle a lamina come elemento di contrasto dei moduli ha portato diversi benefici. In
primo luogo, grazie alla loro bassa rigidezza in condizioni di instabilità elastica (Fig. 6), una elevata
corsa angolare, secondariamente un’estrema facilità di prototipazione dell’intero attuatore.
Il modello macromeccanico per la previsione della corsa dell’attuatore a filo avvolto è stato modificato
per permettere di considerare due valori di tensione differente nelle fasi di recupero e di deformazione.
Come si osserva da Fig. 8, le previsioni in termini di corsa angolare erogata dal singolo modulo sono
in linea con quelle ottenute sperimentalmente, per tutti i livelli di coppia frenante applicata, con un
errore che non supera mai il 2.5%.
42° CONVEGNO NAZIONALE – SALERNO, 11-14 SETTEMBRE 2013
3.0
0 Nmm
5 Nmm
10 Nmm
15 Nmm
20 Nmm
Velocità Rotazione (giri/min)
2.5
2.0
1.5
1.0
0.5
0.0
0.0
0.5
1.0
1.5
Tempo Alimentazione Modulo (s)
2.0
Fig. 10 – Velocità di rotazione al variare del Fig. 11 – Immagine del prototipo realizzato
tempo di fase per diversi valori di coppia frenante
Inoltre l’errore commesso dal modello analitico è sempre in eccesso e probabilmente dovuto alla
mancata introduzione della coppia di trascinamento delle ruote libere e del freno (valori non
disponibili).
La dinamica dell’attuatore è abbastanza rapida, come dimostrano i dati relativi all’attuazione del
singolo modulo (Fig. 9). Il tempo di ritardo dell’attuatore, definito come il tempo trascorso
dall’accensione del modulo per raggiungere il 50% dell’angolo massimo attuato varia tra i 0.7 secondi
dell’attuatore scarico ai 1.3 secondi dell’attuatore frenato con 20Nmm. Tali tempi possono essere
ridotti aumentando l’intensità della corrente, pur prestando attenzione alla resistenza a fatica del filo
[12].
Un importanza decisiva per la velocità di rotazione e per la fluidità di funzionamento dell’attuatore è il
tempo di alimentazione del singolo modulo. Per come è stata implementata la logica di attivazione,
questo parametro influenza non solo il riscaldamento del filo, ma anche il tempo raffreddamento che
vale, essendo 3 i moduli attivati in sequenza, 2∙tfase. Come si osserva da Fig. 10, a prescindere dalla
coppia frenante applicata, la velocità di rotazione dell’attuatore aumenta calando il tempo di fase, fino
ad un certo valore limite in cui si ottiene la massima velocità di rotazione. Diminuendo ancora il
tempo di fase, si registra un calo della velocità di rotazione in quanto il filo non fa in tempo a
raffreddarsi completamente (trasformazione parziale austenite – martensite).
La Fig. 10 mostra, conformemente all’intuizione, che la velocità di rotazione è minore quanto
maggiore è il carico applicato all’attuatore. Inoltre il tempo tfase per cui si registra la massima velocità
di rotazione è tanto maggiore quanto più è elevato il carico applicato, ossia quanto più alta è la
tensione nel filo. La spiegazione del fenomeno è imputabile al fatto che più la tensione è elevata più le
temperature di trasformazione sono alte e, a parità di corrente elettrica, è necessario un maggior tempo
per raggiungerle.
Un inconveniente della soluzione a filo avvolto che si ripresenta anche in questo attuatore è la
tendenza del tamburo antifrizione a scaldarsi progressivamente durante il funzionamento, a causa della
scarsa conduttività del materiale. Per ovviare a questo problema può essere utile utilizzare delle ruote
libere di diametro maggiore così da ridurre al minimo lo spessore del tamburo in materiale
antifrizione, in modo da favorire lo scambio termico.
L’attuatore è stato provato con una coppia massima applicata di 20Nmm, in quanto valore limite per il
freno in dotazione. A questo valore di carico, la tensione massima nel filo SMA è di circa 260MPa.
L’attuatore è certamente in grado di erogare coppie superiori a tale valore, al prezzo del decadimento
della corsa angolare, della velocità di rotazione, e della vita a fatica.
Gli ingombri dell’attuatore di Fig. 8 sono 178x70x65mm. Escludendo l’apparato frenante e il sensore
di posizione, tali dimensioni potrebbero ridursi senza variazioni di prestazioni, a circa 60x20x35mm.
Facendo riferimento ai parametri definiti da Nespoli [13], con questi ingombri l’attuatore
presenterebbe le seguenti prestazioni: SR=0.014°/mm3, TR=0.8∙10-3Nmm/mm3, WR=0.3∙10-5J/mm3, che
42° CONVEGNO NAZIONALE – SALERNO, 11-14 SETTEMBRE 2013
lo posizionano tra gli attuatori maggiormente efficienti tra quelli di letteratura. In particolare il
parametro WR (lavoro per ciclo per unità di volume) è circa tre volte più alto del migliore riportato in
[13].
7. CONCLUSIONI
L’architettura di attuatore rotativo proposto, basato sul concetto di attuatore a filo avvolto di Song e
sull’introduzione di ruote libere, garantisce un funzionamento continuo e unidirezionale. Inoltre la
soluzione risulta estremamente flessibile grazie all’architettura modulare, consentendo di realizzare
con lo stesso modulo base una gamma di dispositivi dalle prestazioni differenti.
Le prestazioni erogate dal dispositivo sono più che soddisfacenti, sia in termini di coppia che in
termini di corsa angolare del singolo modulo. In particolare, per quest’ultima caratteristica notevoli
benefici sono stati ottenuti dall’utilizzo delle molle a lamina come elemento di contrasto grazie alla
loro bassissima rigidezza.
Anche le prestazioni dinamiche del dispositivo sono risultate buone, con una velocità media di
rotazione compresa tra 1 e 2.5 giri/min in funzione del carico applicato, e un tempo di ritardo per il
singolo modulo (tempo per raggiungere il 50% della rotazione massima) inferiore al secondo.
Il modello analitico sviluppato per la determinazione della corsa angolare modulo base fornisce
un’ottima stima della prestazione, con un errore inferiore al 2.5% rispetto ai risultati sperimentali.
Gli sviluppi del lavoro riguardano la realizzazione di un prototipo ingegnerizzato e miniaturizzato, con
un numero di moduli pari (ad esempio 4 o 6) in modo da poterlo utilizzare sia in configurazione seriale
che parallela. Inoltre si prevede di studiare le prestazioni dell’attuatore anche in condizioni di
sovrapposizione parziale delle fasi di alimentazione dei moduli.
BIBLIOGRAFIA
[1] B.H. Park, M. Shantz, F. Prinz, Scalable rotary actuators with embedded shape memory alloy,
Proceedings on SPIE 4327 78–87, (2001).
[2] S. Jansen, J. Breidert, E.G. Welp, Positioning actuator based on shape memory wires, in:
ACTUATOR 2004, 9th International Conference on New Actuators, (2004).
[3] Miga Motor Company, http://www.migamotors.com.
[4] Toki Corporation, http://www.toki.co.jp/biometal.
[5] E. Dragoni, G. Scirè M., I. Spinella, “Conceptual Design and Simulation of a Compact Shape
Memory Actuator for Rotary Motion”, J. of Materials Eng. and Performance, 18,638-648, (2009)
[6] F. Pöhlau, H. Meier, Extremely compact high-torque drive with shape memory actuators and
strain wave gear Wave Drive®, ACTUATOR 2004 9th Int. Conference on New Actuators, (2004).
[7] S.V. Sharma, M.M. Nayak, N.S. Dinesh, Modelling, design and characterization of shape
memory alloy-based poly-phase motor, Sens. Actuators A, 147, (2008).
[8] G. Song, “Design and control of a Nitinol wire actuated rotary servo”, Smart Mat. Struct., 16,
1796-1801, (2007)
[9] G. Scirè Mammano, E. Dragoni, “Modeling of wire-on-drum shape memory actuators for linear
and rotary motion”, J. of Intelligent mat. sys. Struct, 22, 1129–1140 (2011).
[10] G. Scirè Mammano, E. Dragoni, “Increasing stroke and output force of linear shape memory
actuators by elastic compensation”, Mechatronics, 21, 570–580 (2011).
[11] G. Scirè Mammano, E. Dragoni, “Progetto di sospensioni a bassa rigidezza composte da aste in
instabilità elastica”, Sesta Giornata di Studio Ettore Funaioli 16 luglio 2012, ISBN: 978-88-7488615-9, Ed. Esculapio, (2013)
[12] G. Scirè Mammano, E. Dragoni, “Effect of heating speed and degree of transformation on the
functional fatigue of niti shape memory wires”, 6th ECCOMAS Conference on Smart Structures
and Materials SMART201, Politecnico di Torino, 24-26 June 2013 (2013)
[13] A. Nespoli et all., The high potential of shape memory alloys in developing miniature mechanical
devices: A review on shape memory alloy mini-actuators, Sens.Actuators A, 158, 149-160 (2010).