Dinamica del punto materiale
1. La meccanica classica o Newtoniana.
2. Concetto di Forza
3. Prima legge di Newton: il principio di inerzia
4. Legge di inerzia e sistemi di riferimento inerziali
5. Concetto di Massa e definizione della quantità di moto
6. Seconda legge di Newton
7. Conservazione della quantità di moto
8. Terza legge di Newton: il principio di azione e reazione
9. Definizione operativa della forza ed unità di misura
10. Definizione operativa della massa
11. Esempi di forze: la forza peso
12. La forza elastica: Legge di Hooke
Meccanica Newtoniana
Ø La dinamica di un punto materiale affronta lo studio delle cause del moto.
L’accelerazione è causata da “qualcosa che spinge o tira”. Se tiriamo o spingiamo
un corpo su di esso “applichiamo una forza”. Bisogna fare però attenzione che non
sempre le forze causano un movimento.
Ø La teoria che lega le cause del moto alle variabili cinematiche che lo descrivono è
detta Meccanica.
Ø Noi studiamo la meccanica classica, ovvero la teoria nella quale tutti i fenomeni
di moto si possono descrivere usando soltanto tre leggi semplici dette leggi di
Newton.
Ø Vengono introdotti i concetti di Forza e di Massa, tramite i quali è possibile
collegare le cause del moto alle variabili cinematiche che lo descrivono.
Forza
Ø Il moto di un corpo è il risultato della sua interazione con i corpi circostanti.
Ø I fisici sono riusciti a ricondurre tutti i fenomeni al manifestarsi di quattro tipi di
interazioni fondamentali:
Ø Gravitazionale(originata dalla presenza di materia)
Ø Elettromagnetica (originata dalla presenza di carica elettrica)
Ø Debole (responsabile di alcuni decadimenti radioattivi)
Ø Forte (operante tra le particelle fondamentali e genera il legame tra i nuclei)
Ø Ultimamente le interazioni elettromagnetica e debole sono state unificate in
un’unica teoria “elettro-debole”.
Ø Le interazioni di un corpo con l’ ambiente esterno sono sintetizzate (in meccanica
classica) dall’azione di una grandezza fisica vettoriale detta Forza.
Ø L’azione simultanea di più forze su di un corpo si può sintetizzare tramite la loro
somma vettoriale (detta RISULTANTE).
Prima legge di Newton
Questa legge in realtà risale ai tempi di Galileo ( alla prima metà del 17° secolo) , è
conosciuta con il nome di PRINCIPIO D’ INERZIA e dice:
“ Un corpo a riposo, rimane a riposo ed un corpo in movimento continua a
muoversi con velocità costante se su di esso non agiscono forze esterne”
Inerzia:
Tendenza di un corpo ad opporsi ad una variazione del moto
Prima legge nella forma espressa da Newton:
Ogni corpo permane nel suo stato iniziale di quiete o di moto rettilineo
uniforme, fin quando non è costretto a cambiare il suo stato da una forza
che viene applicata su di esso
Questo concetto ci è familiare ma va contro l’esperienza comune:
se lanciamo un oggetto con una certa velocità iniziale esso non se ne andrà via
lungo una traiettoria rettilinea, ma ad un certo punto si fermerà..
Questo perché c’è la forza gravitazionale
Ma se pensiamo di fare la stessa cosa nello spazio?
L’oggetto proseguirà indefinitamente il suo moto lungo la direzione della velocità
iniziale.
Sistema di riferimento inerziale
Il principio di inerzia non è valido in tutti i sistemi di riferimento
Il principio di inerzia è valido nei sistemi di riferimento INERZIALI
Sistema di riferimento INERZIALE= Un qualsiasi Sistema di riferimento
che si muove con velocità costante ( quindi con accelerazione nulla)
Se un sistema di riferimento è inerziale, ogni altro sistema che si muove a velocità
costante rispetto ad esso è ancora un riferimento inerziale.
!
!
F =0⇒a =0
La prima legge di Newton si può sintetizzare dicendo che se
,
cioè quando su un corpo non agisce alcuna forza, la sua accelerazione è nulla
Ciò implica che vi può essere movimento ( a velocità costante) senza che agiscano
forze sul corpo e che tale legge non distingue tra corpo in quiete o a velocità costante.
In effetti se un corpo si trova a v=0 oppure a v≠0 dipende dal sistema di riferimento
dal quale lo si osserva.
(Se osserviamo un passeggero seduto su un treno in movimento dal sedile di fronte
esso è in quiete, se lo osserviamo dalla stazione esso è in movimento)
NB: possiamo provare la prima legge di newton?
NO- perché non possiamo essere sicuri al 100% che il nostro sistema di riferimento sia
un sistema inerziale
Ma ci fidiamo???
SI- perché tale legge è consistente, all’interno dell’incertezza sperimentale, con tutti gli
esperimenti che sono stati fatti finora ( metodo scientifico)
Sistemi inerziali
Questa stanza non è un sistema inerziale….
Ø Noi ci troviamo sulla Terra che ruota intorno a se stessa ( T=24h) => acentripeta
Ø La Terra ruota anche intorno al sole (T=365 giorni)
Ø Ed il Sole ruota nel braccio della via Lattea (T=200-250 milioni di anni)
Ma quanto ci allontaniamo dall’idea di un sistema inerziale?
Proviamo a dare una stima dell’accelerazione del nostro sistema di riferimento
Consideriamo la rotazione della Terra intorno al suo asse
ω
Periodo di rotazione: T = 24 ⋅ 3600s = 86400s = 8.64 ⋅104 s
Raggio della Terra: R = 6370km = 6.37 ⋅106 m
RTerra
w=
2π
2 ⋅ 3.14
=
rad s = 7.27 ⋅10−5 rad s
4
T 8.64 ⋅10
aC
Terra
g ~ 300 ⋅ aC
Terra
aC
Terra
~0
(
)
2
= w2 R = 7.27 ⋅10−10 ⋅ 6.37 ⋅106 m s = 0.034m s
Quando studiamo i moti dovuti ad accelerazioni
comparabili a quella gravitazionale possiamo
considerare la Terra un sistema inerziale
Massa
Ø La massa è una proprietà intrinseca di un oggetto che misura la
resistenza che esso oppone a variare la sua velocità (cioè l’inerzia del
corpo). È una delle grandezze fondamentali.
Maggiore è la massa di un oggetto minore è l’accelerazione dell’oggetto quando viene
sottoposto ad una data forza
Ø La massa è indipendente da ciò che lo circonda e dal metodo adoperato per
misurarla.
Ø La massa è una quantità scalare (obbedisce alle regole dell’aritmetica ordinaria)
Le masse si sommano e si sottraggono in modo numericamente semplice
Es:
posso mettere due masse insieme, una di 1Kg ed una di 3kg, a formare una massa
totale di 4Kg
NB:
Massa e Peso sono due grandezze differenti!!!!!!!!!
La massa di un corpo rimane la stessa sia qui che
sulla Luna, il peso del corpo cambierà ( il peso del
corpo, misurato sulla Terra, sarà maggiore del peso
misurato sulla Luna)
Seconda legge di Newton(1)
Abbiamo appreso dalla prima legge della dinamica che una forza netta non nulla applicata
ad un corpo deve modificarne necessariamente la velocità, cioè provocare un
cambiamento del modulo, della direzione o del verso del vettore velocità.
L’azione di una forza produce una accelerazione.
Ma qual’è la relazione esatta tra forza e accelerazione?
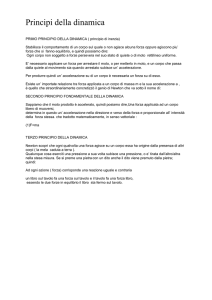
Consideriamo una molla a riposo con un
estremo fissato al muro
Estendiamola di una certa lunghezza
(non è importante numericamente quanto,
ma solo che durante la misura che si sta per fare
questa lunghezza sia sempre riproducibile)
Attacchiamo all’estremo libero una massa
m1 e misuriamo l’accelerazione a1 subito
dopo aver rilasciato la molla
A riposo
Spinta
Spinta
Misura
m1
a1
m2
a2
Facciamo la stessa cosa con diverse masse ( es m2> m1)
Risultato sperimentale: a parità di forza
risultante applicata, più grande è la massa
minore sarà ’accelerazione osservata
Cioè se m1=1/10m2 allora a1 = 10a2
m1a1=m2a2
m1 a2
=
m2 a1
Seconda legge di Newton(2)
1) A parità di forza applicata l’accelerazione di un corpo è inversamente
proporzionale alla sua massa (più grande è la massa minore sarà l’accelerazione osservata)
m1a1=m2a2
Da semplici esperimenti è possibile verificare che applicando una forza doppia ad un certo
oggetto, l’accelerazione prodotta sarà due volte più grande, applicando una forza tripla,
l’accelerazione sarà tre volte più grande, e così via.
Questo porta a dire che:
! !
F ∝a
2)A parità di massa l’accelerazione di un corpo è proporzionale alla forza risultante
ad esso applicata.
Basandosi su queste evidenze sperimentali, Newton enunciò e formalizzò
matematicamente la seconda legge della dinamica:
Seconda legge di Newton:
L’accelerazione di un oggetto è direttamente proporzionale alla forza
risultante agente su di esso ed è inversamente proporzionale alla sua
!
massa
!
a=
∑F
m
!
!
F
=
m
a
∑
!
F
NB: ∑ è la forza risultante data dalla somma vettoriale di tutte le forze agenti sull’oggetto
di massa m
Forza
Altro modo di definire la seconda legge di Newton:
“Una forza che agisce su un corpo, produce su di esso un’accelerazione
stessa direzione della forza ed il modulo della forza è pari ad ma
La forza è un vettore:
Un corpo risulta in equilibrio se
la somma di tutte le forze che
agiscono su di esso è nulla:
!
!
!
Ftot = ∑ F = ma
!
a
avente la
⎧ Ftot = ma x
⎪⎪ x
⎨ Ftot y = ma y
⎪
⎪⎩ Ftotz = ma z
⎧ Ftot = 0
!
!
⎪⎪ x
Ftot = ∑ F = 0 ⎨ Ftot y = 0
⎪
⎪⎩ Ftotz = 0
!
a=0
Anche il secondo principio della dinamica è valido solo in sistemi di riferimento
inerziali
NB: possiamo provare la seconda legge di Newton?
NO- perché non possiamo essere sicuri al 100% che il nostro sistema di riferimento sia
un sistema inerziale
Ma ci fidiamo???
SI- perché tale legge è verificata, all’interno dell’incertezza sperimentale, da tutti gli
esperimenti che sono stati fatti finora ( metodo scientifico)
Definizione operativa della forza
La seconda legge della dinamica permette di introdurre una definizione operativa
di forza:
m=1kg
Si consideri il chilogrammo campione,
poggiato su un piano orizzontale privo di
attrito ed agganciato ad una molla.
m=1kg
Se la molla viene allungata essa esercita
una forza sulla massa campione e quindi
un’accelerazione.
Definiamo unitaria la forza esercitata dalla molla quando questa imprime
al kg campione una accelerazione di 1 m/s2
Tale forza unitaria equivale ad 1 N (Newton) ed è legato alle grandezze
fondamentali dalla seguente espressione:
kg ⋅ m
1N = 1 2
s
Definizione Operativa di massa
La seconda legge della dinamica permette di introdurre anche una definizione
operativa di massa:
Se applichiamo una stessa forza F a corpi diversi, abbiamo visto che:
F = m1a1 = m2a2
e quindi
m1 a2
=
m2 a1
In particolare se confrontiamo l’accelerazione a di un corpo di massa incognita m con
quella a0 del campione di massa m0 =1kg sottoposto alla stessa forza, otteniamo
una misura della massa incognita m tramite la relazione :
Misurata
sperimentalmente
m a0
=
m0 a
a0
m = m0
a
a0
m = kg
a
Misurata
sperimentalmente
Esempio di Forza: Forza Gravitazionale
Ø La forza gravitazionale è la forza esercitata dalla Terra su un corpo.
Ø Tale forza è una grandezza vettoriale, la cui direzione è la direzione
!
dell’accelerazione gravitazionale g , cioè quella dal corpo al centro della terra.
Ø Se un corpo è lasciato libero di muoversi sulla superficie terrestre, sottoposto alla
sola forza gravitazionale, esso subisce l’accelerazione di gravità:
! !
!
∑ F =Fgrav = mg g
!
!
dove sia gche Fgrav sono diretti verso il centro della terra.
!
!
Ø La relazione Fgrav = m g g non richiede che il corpo sia in movimento.
Ø la forza di gravità è sempre presente, anche se un corpo non si muove perché
poggiato su una superficie.
Ø La massa mg ( massa gravitazionale) determina l’intensità dell’attrazione
gravitazionale tra il corpo e la Terra, in linea di principio essa è diversa dalla massa
inerziale ( cioè quella proprietà intrinseca dei corpi di opporsi ad una variazione
della velocità dovuta all’applicazione di una forza), ma i risultati sperimentali
nell’ambito della meccanica classica portano a dire che tali masse hanno stesso
valore numerico
Forza Gravitazonale ePeso(1)
Ø Il modulo della forza gravitazionale è detto Peso P:
P = mg g
Poiché il peso dipende da g, esso dipende dalla posizione geografica, i corpi pesano di
meno su una montagna (quindi ad altitudini elevate) che non al mare poiché
l’accelerazione g diminuisce allontanandosi dalla superficie terrestre ( o per meglio
dire dal centro della Terra)
Il peso non è una proprietà intrinseca dei corpi ( a differenza della massa)
Esempio:
l’accelerazione gravitazionale sulla luna è pari a gLuna= 1.6 m/s2
Il peso di un corpo di massa 10 kg sulla Terrà è
Pterra = mgterra = mg ≈ 98 N
Il suo peso sulla Luna è:
Pluna = mgluna ≈ 16 N
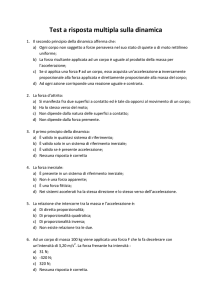
Forza gravitazionale e Peso(2)
Se teniamo sul palmo della mano una pallina da tennis, braccio teso, la pallina
rimane ferma nel palmo della mano, non è soggetta ad accelerazione e quindi la
forza risultante applicata alla pallina deve essere nulla.
Sappiamo che la pallina ha una massa ( m= 58 g per la precisione)
e quindi è sottoposta alla forza gravitazione mg
Ma la forza totale deve essere nulla, quindi è chiaro che il
palmo della mano deve “spingere verso l’alto” la pallina
con un forza uguale e contraria a mg
!
a=0
!
!
Ftot = ma = 0
!
!
!
Ftot = Fpalmo + Fg = 0
Fpalmo ≅ 0.5 N
m = 58 g
mg ≅ 0.5 N
Fpalmo = −mg
NB: non c’è alcun riferimento alla velocità nella seconda legge di Newton, quindi un
corpo è soggetto alla stessa forza gravitazionale, indipendentemente dalla sua
velocità ( a meno che tale velocità non sia prossima a quella della luce, in questo
caso infatti la meccanica newtoniana non vale più e bisogna passare alla relatività
ristretta di Einstein)
Esempio di applicazione delle forze:
Consideriamo un blocco che si trova su una superficie orizzontale priva di attrito
sul quale soffia il vento da sinistra verso destra
1) Disegnare l’oggetto
sul quale agiscono le
forze
6) Disegnare gli assi
coordinati secondo la
scelta più opportuna
2) Identificare ciò che è
responsabile delle forze
in gioco (vento, gravità
superfici….)
!
Fsup→blocco
!
Fvento
y
x
!
Fg
3)Disegnare i vettori
che identificano le
forze e contrassegnarli
4)Assicurarsi che le
frecce puntino nella
giusta direzione e nel
giusto verso
5)Controllare la
lunghezza dei vettori
secondo il!confronto
tra i
!
moduli ( Fg = − Fsup→blocco )
Terza legge di Newton
!
Se un corpo esercita una forza
! F12 su un altro corpo, l’altro corpo eserciterà
su di esso una forza F21uguale in modulo ma di verso opposto
3° legge
di
Newton
!
!
F12 = − F21
Azione = -Reazione
Non esiste una singola forza
isolata, ma le forze si
presentano sempre a coppia
E la forza gravitazionale allora?
Consideriamo una bambina che salta a corda
Quando la bambina imprime al terreno una spinta per giocare a saltare con la corda è lei a spostarsi verso
l’alto o non è invece la Terra a spostarsi verso il basso?
La bambina preme il terreno con la stessa forza con cui il terreno spinge lei verso l’alto… ma…:
!
FTB
!
FBT
!
!
FTB = − FBT
!
!
FTB = − FBT "
!
$
! $
FTB = mB aB #
!
! $
FBT = M T aT $
%
!
!
mB |aB |= M T aT
!
!
mB << M T ⇒ aT << aB
La legge di azione e reazione vale sempre, sia che gli oggetti stiano fermi
sia che risultino accelerati
Esempi di Azione-Reazione
Un palloncino che si sgonfia:
Ø L’aria dentro il palloncino gonfiato preme in tutte le direzioni e quando
si lascia libera l’apertura, l’aria viene premuta fuori dal foro di uscita.
Ø Per reazione l’aria genera una pressione nella direzione opposta sulla
superficie interna del palloncino che di conseguenza comincia a
muoversi nella direzione opposta a quella della fuoriuscita di aria.
!
!
Fpalloncino Faria
La possibilità di muoversi camminando:
Ø la persona preme il piede spingendo indietro il terreno
Ø il terreno spinge il piede in avanti
Lancio di un razzo:
Ø Il motore del razzo spinge gas verso il basso
Ø Il gas spinge il razzo verso l’alto
Attenzione:
Nel caso particolare in cui due forze sono applicate ad un corpo che ha accelerazione
nulla la seconda legge di Newton potrebbe sembrare ingannevolmente simile alla
legge di azione e reazione. In realtà la seconda legge di Newton si applica al singolo
corpo mentre la terza si applica all’interazione tra due corpi
Forza Normale (o reazione Vincolare)(1)
Quando un corpo preme contro una superficie ( anche se apparentemente
!
rigida) la superficie si “deforma” e spinge il corpo con una forza FN
normale a tale superficie ( reazione vincolare)
Esempio: Un corpo di massa m giace sulla superficie orizzontale di un tavolino:
Ø Il corpo preme sul tavolo a causa della forza gravitazionale Fg, deformandolo
Ø Il Tavolo preme il corpo verso l’alto con la forza normale FN
(cioè perpendicolare alla superficie del tavolo)
Corpo di
massa m
Ø Sul corpo agiscono solo la forza peso e la forza normale ed entrambe
sono dirette verticalmente
!
FN
y
!
!
Fg = mg
( prendiamo in considerazione solo le componenti lungo y).
!
!
Fg = mg
Ø Dalla seconda legge della dinamica otteniamo il modulo
della forza normale:
!
! ! !
∑ F = ma = Fn + Fg ⇒
∑F
y
= ma y = FN − mg
FN = m (a y + g )
Somma delle forze che
agiscono sul corpo di massa m
Nel caso in cui il corpo ha accelerazione nulla
( come nel nostro caso) si ha che:
ay = 0
⇒ FN = m g
Forza Normale (2)
Attenzione: la forza normale non è necessariamente uguale alla forza peso:
Prendiamo di nuovo l’esempio di una scatola poggiata su un tavolo
Caso (a) => identico al caso appena visto
∑F
y
= FN − mg = 0
y
FN = mg
Caso (b) => una mano preme sulla
scatola con una forza di 40N (alla forza
peso che preme sul tavolino si aggiunge
la forza della mano)
∑F
Caso (c) => una mano tira la scatola
verso l’alto con una forza di 40N (la
forza peso e la forza della mano
agiscono in versi opposti)
∑F
y
= FN − mg − 40 N = 0
y
FN = mg + 40 N
y
= FN − mg + 40 N = 0
FN = mg − 40 N
y
Forza Normale (3)
Attenzione: la forza normale non è necessariamente Verticale!
FN
!
FN È sempre perpendicolare alla superficie del vincolo
!
Fg È sempre perpendicolare alla superficie della terra
Corpo di
massa m
!
Fg
Attenzione: la forza normale non sempre bilancia Fg
" "
"
∑ F = FN + Fg
!
FN
⎧∑ Fx = Fg sin θ = ma x ≠ 0
⎪
⎨∑ Fy = FN + Fg cosθ = 0
!
⎪
− mg
⎩
Componente
!
lungo
y
di
F
g
⎧⎪FN x = 0
⎨
⎪⎩FN y = FN = mg cosθ
y
!
FN
!
Ftot
x
!
θ Fg θ
la forza normale FN bilancia solo la componente di Fg perpendicolare
alla superficie vincolare
y
Tensione
Ø Le funi sono dispositivi che permettono di trasmettere l’ azione di una forza applicata in un
dato punto ad un punto diverso.
Ø La fune viene considerata inestensibile e priva di massa ed il modulo della forza esercitata in
un qualsiasi punto della fune è lo stesso in tutti i punti della fune
Ø Se quindi applico una forza a un estremo di una fune tesa, questa risponde con una forza che
si trasmette lungo la fune in modo tale che ogni punto della corda abbia accelerazione nulla
relativamente a tutti gli altri. ⇒ le forze ai capi della corda sono uguali ed opposte
Ø Q!uando un corpo viene tirato mediante una fune ancorata ad esso, la fune esercita una forza
T sul corpo
!
Ø La forza T è diretta lungo la fune nel verso di allontanamento dall’oggetto ed il modulo T di
questa forza viene detta tensione della fune
Ø La fune viene concepita solo come un collegamento tra i due corpi e questo concetto vale
anche se la fune passa per una carrucola (o puleggia), La fune permette di “trasportare”
le forze, e di cambiare la direzione della loro retta di azione.
Esempio di tensione : carrucola
Un facchino utilizza una fune passante attorno a due carrucole per sollevare un pianoforte del
peso di 2000 N.
Quale forza deve esercitare sulla fune?
NB: Per funi di massa trascurabile il modulo della tensione è lo stesso in ogni punto della fune
La forza applicata da facchino è uguale in modulo alla
!
tensione della fune T
FT = T
Se consideriamo le forze applicate sul pianoforte avremo:
!
! ! ! !
∑ F = ma = T + T + Fg ⇒
ma = 2T − mg
Per far muovere il pianoforte dovremo avere:
ma = 2T − mg ≥ 0
E quindi:
!
mg
FT = T ≥
2
NB : per risolvere esercizi con carrucole potete immaginare
di chiudere la carrucola in una scatola ed ad ogni fune
uscente ed entrante associare una forza (tensione). Se il
sistema è in equilibrio le forze uscenti e le forze entranti
devono compensarsi sommandole come vettori.
y
Forze di attrito
Ø La presenza delle forze di attrito fa parte dell'esperienza quotidiana.
Ø Se si tenta di far scorrere un corpo su una superficie scabra, si sviluppa una
resistenza allo scorrimento detta forza di attrito.
Ø A livello microscopico l’attrito è dovuto alle microfusioni che si formano in
corrispondenza delle asperità delle due superfici a contatto
Ø La forza di attrito può essere schematizzata come una forza tangente alla
superficie
Attrito statico
Consideriamo un oggetto poggiato sul pavimento su cui viene applicata una forza F
orizzontale( per esempio verso sinistra)
La forza di Attrito statico è la forza che contrasta F e che impedisce all’oggetto di
muoversi
Corpo in quiete (non viene applicata
alcuna forza sul corpo oltre alla forza
peso ed alla reazione vincolare)
quiete
Viene applicata una forza F < fsmax,
Il corpo continua a rimanere fermo
Aumentando F, fin quando F < fsmax,
Il corpo continua a rimanere fermo
F = fsmax,
Il corpo continua a rimanere fermo
Non appena F>fsmax il corpo comincia a muoversi
Attrito dinamico
Quando F ha superato fsmax, il corpo ha cominciato a muoversi con un’accelerazione
nel verso della forza applicata e la forza di attrito diminuisce e viene detta Forza di
attrito dinamica
La forza risultante Fnet=F-fd determina
un’accelerazione nel suo stesso verso ( 2° legge
di Newton)
F > fd
Se riduciamo F fino ad avere che F=fd la forza
risultante sarà nulla così come l’accelerazione
ed il corpo procederà di moto rettilineo
uniforme
F = fd
Se riduciamo ancora F (fino ad avere F=0 ) la forza risultante sarà solo la forza di
attrito dinamico (che si oppone al moto) => l’accelerazione avrà verso opposto alla
velocità => la velocità diminuirà fino ad annullarsi
Attrito
Sperimentalmente si trova che:
La direzione della forza d’attrito è sempre parallela alla superficie ed il
verso è sempre opposto al verso del moto ( o alla forza applicata che cerca
di produrre il moto)
L’intensità sia della forza di attrito statico che quella di attrito dinamico
sono proporzionali al modulo della forza normale esercitata dalla
superficie sul corpo
f s ≤ f s max = µ s N
f d = µd N
!
fs = fs
!
fd = fd
!
N= N
Dove :
µ s = coefficiente di attrito statico ⎫
⎬
µ d = coefficiente di attrito dinamico⎭
µs > µd
I valori dei coefficienti di attrito µs e µd dipendono dalla natura delle superfici a
contatto ed in prima approssimazione µd NON dipende dalla velocità tra le due
superfici
Attrito (riassunto)
Esempio Attrito
y
ESEMPIO: Scatola contro il muro
x
Come può una forza orizzontale impedire ad un
oggetto di muoversi verticalmente?
1) Ho bisogno di attrito
2) Devo premere abbastanza
Corpo fermo
!
ma = 0
⎧max = F − N = 0
⎨
⎩ma y = −mg + µ s N = 0
⇔
! !
! ! !
ma = F + Fg + N + f s = 0
⎧F = N
⇒ µ s F = mg
⎨
⎩µ s N = mg
Si avrà quindi che se:
µ s F ≥ mg
La scatola NON scivola giù
µ s F < mg
La scatola scivola giù
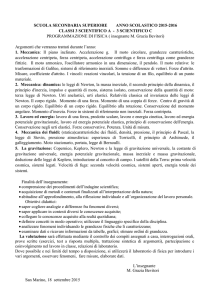
Esempio Piano inclinato con attrito
Se un corpo di massa 10 kg rimane in equilibrio senza scivolare su un piano
inclinato di un angolo α= 45° rispetto al piano orizzontale, ne deduciamo che
soggetto ad una forza di attrito statico il cui coefficiente di attrito è maggiore o
y
uguale a:
!
⎧ma x = 0
!
1)0.54
!
F = ma = 0 ⇒ ⎨
∑
P
=
mg
sinα
⎧
FN
x
2)0.74
⎩ma y = 0
⎨
Py = −mg cosα
3)0.84
⎩
!
! !
! !
!
4)0.94
F = ma = F + N + f
∑
g
Ftot
s
= tan α
⎧ma x = Px - f s = +mg sinα - f s = 0
⎨
⎩ma y = Py + N = −mg cosα + N = 0
⎧f s = + mg sinα
⎨
⎩N = mg cosα
Ma:
fs = µs N
x
!
θ Fg θ
mg sinα = µs mg cosα
mg sinα µ = tanα = tan 40° = 0.84
µs =
s
mg cosα
Il moto circolare e la seconda legge di Newton
Un corpo che si muove con velocità in modulo costante v e lungo una traiettoria
circolare di raggio r subisce un’accelerazione centripeta ac =v2/r
Se c’è un’accelerazione deve esserci una FORZA
Risultante non nulla che genera tale variazione del
moto
FORZA CENTRIPETA
diretta verso il centro della circonferenza, sempre
ortogonale alla velocità e di modulo pari a
v2
Fc = m
r
La forza centripeta NON è un nuovo tipo di forza, ma è una qualsiasi forza che
causa un’accelerazione centripeta, imponendo al corpo un moto lungo una
traiettoria circolare
Esempi di forza centripeta (1)
Palla trattenuta da un filo:
La palla di massa m tenderebbe a mantenere il moto
lungo un percorso rettilineo ( per la prima legge di
Newton), ma il filo impedisce questo moto esercitando
una forza radiale sulla pallina che lo mantiene sulla
traiettoria circolare => è la tensione del filo che causa il
moto circolare
! !
Fc = T
Se si spezza il filo, e viene a mancare la tensione la
pallina procederà di moto rettilineo uniforme con
direzione e velocità date dalla velocità all’istante della
rottura
Giostra Rotor:
Quando la giostra comincia a girare, le persone
all’interno (poggiate già alla parete) tenderebbero per
inerzia a rimanere al loro posto originario, ma il
pavimento ruota e la parete le costringe a girare
!
!
Fc = N
Esempi di forza centripeta (2)
Satellite che orbita intorno alla terra:
Forza gravitazionale:
ogni particella nell’universo attrae un’altra particella con una
forza che è direttamente proporzionale al prodotto delle due
masse ed inversamente proporzionale al quadrato della loro
distanza e la forza è diretta lungo la congiungente le due masse
!
m1m2
Fg = G 2 rˆ
r
G=6,67· 10-11 Nm2 / kg2
Il satellite sarà vincolato a ruotare intorno alla Terra a causa della
sua attrazione gravitazionale
! !
msatellite ⋅ mterra
Fc = Fg = G
rˆ
2
(Rterra + h)
Molla e legge di Hooke
Consideriamo un corpo di massa m poggiato su una superficie priva di attrito
ed attaccato all’estremità libera di una molla e consideriamo che la posizione
di equilibrio (F=0) sia in x=0
Ø Se la molla viene allungata o compressa
di un tratto x rispetto alla sua posizione
di equilibrio essa eserciterà una forza
proporzionale allo spostamento che si
oppone ad esso:
legge di Hooke
F = −kx
La costante di proporzionalità k è detta
costante elastica della molla
La forza esercitata dalla molla è sempre
diretta in verso opposto a quello dello
spostamento dalla posizione di
equilibrio x=0
NB: la x nella formula rappresenta lo spostamento dalla posizione di equilibrio, se tale
posizione fosse stata in un punto x=xo la legge di Hooke sarebbe stata scritta:
F = −k (x − x0 )
#"!
Δx
Moto (oscillatorio) armonico
La legge di Hooke ci fornisce l’andamento della forza di un corpo soggetto ad una
forza elastica. L’equazione del moto si può ora ricavare dalla seconda legge di
Newton:
Equazione differenziale di
secondo grado omogenea
F = ma = −kx
ma = −kx
d 2x
k
a= 2 =− x
dt
m
d 2x
2
=
−
ω
x
2
dt
Dove:
ω2 =
k
m
La soluzione di questa equazione è una funzione trigonometrica che rappresenta
una oscillazione:
x(t ) = A cos(ωt + φ )
NB:
ω2 =
k
k
→ω =
è la pulsazione dell’oscillazione, che dipende dalla
m
m
costante elastica della molla e dalla massa ad essa applicata.
Moto armonico (2)
x(t ) = A cos(ωt + φ ) è una soluzione dell’equazione differenziale:
d 2x
2
=
−
ω
x
2
dt
Se infatti deriviamo due volte x(t) otteniamo:
Equazioni di un moto armonico di
ampiezza A, frequenza angolare ω
ed angolo di fase φ
x = A cos(ωt + φ )
dx
d
= A (cos(ωt + φ )) = −ωA sin (ωt + φ )
dt
dt
dx
= −ωA sin (ωt + φ )
dt
d 2x
d
2
(
)
=
−
ω
A
sin
ω
t
+
φ
=
−
ω
A cos(ωt + φ )
2
dt
dt
d 2x
2
=
−
ω
A cos(ωt + φ )
2
$!#
! !"
!
dt
d 2x
2
=
−
ω
x
2
dt
x
Proprietà del moto armonico (3)
Data l’equazione del moto si possono determinare alcune proprietà del moto
oscillatorio: la pulsazione ω ed il periodo T.
Ø Il periodo T e’ pari al tempo minimo che impiega l’oscillazione a tornare alla stessa
posizione con la stessa velocità. Dipende solo da k ed m
2π
m
T=
T = 2π
ω
k
Ø La frequenza f è l’inverso del moto e dipende solo da k ed m:
1 ω
1 k
f = =
=
T 2π 2π m
Ø La frequenza angolare :
ω=
f
2π
=
2π T
Ø Le grandezze A e φ che compaiono nella soluzione sono l’Ampiezza e la costante
di fase e dipendono dalle condizioni iniziali del moto, cioè dalla posizione e dalla
velocità iniziale.
(ωt + φ ) = fase del moto
Es: se abbiamo una molla inizialmente allungata di una quantità L e lasciata
libera di oscillare all’istante t=0, essa comincerà ad oscillare tra x=L ed x=-L si
dovrà avere che:
x(t ) = A cos(ωt + φ )
x(t = 0) = L quindi
⎧ A = L
⎨
⎩cos(φ ) = 1 → φ = 0
Proprietà del moto armonico (4)
Poiché le funzioni seno e coseno oscillano tra +1 e -1:
I valori estremi per x sono ±A,
I valori estremi di v sono ±ωA
I valori estremi di a sono ± ω2A , quindi
x = A cos(ωt + φ )
vx = −ωA sin (ωt + φ )
a x = −ω 2 A cos(ωt + φ )
vmax = ωA = A
amax
k
m
k
=ω A= A
m
2