Modifiche nel presente
Convertitori con le Control Unit CU240B-2 ___________________
manuale
e CU240E-2
SINAMICS
SINAMICS G120
Convertitori con le Control Unit
CU240B-2 e CU240E-2
Istruzioni operative
1
___________________
Avvertenze di sicurezza
___________________
2
Introduzione
___________________
3
Descrizione
___________________
4
Installazione
___________________
5
Messa in servizio
Adattamento della
___________________
6
morsettiera
Configurazione del bus di
___________________
7
campo
___________________
8
Impostazione delle funzioni
Salvataggio dei dati e messa
___________________
9
in servizio di serie
___________________
10
Riparazione
Avvisi, anomalie e messaggi
___________________
11
di sistema
___________________
12
Dati tecnici
___________________
A
Appendice
Edizione 01/2013, firmware V4.6
Istruzioni originali
01/2013, FW V4.6
A5E02299792D AD
Avvertenze di legge
Concetto di segnaletica di avvertimento
Questo manuale contiene delle norme di sicurezza che devono essere rispettate per salvaguardare l'incolumità
personale e per evitare danni materiali. Le indicazioni da rispettare per garantire la sicurezza personale sono
evidenziate da un simbolo a forma di triangolo mentre quelle per evitare danni materiali non sono precedute dal
triangolo. Gli avvisi di pericolo sono rappresentati come segue e segnalano in ordine descrescente i diversi livelli
di rischio.
PERICOLO
questo simbolo indica che la mancata osservanza delle opportune misure di sicurezza provoca la morte o gravi
lesioni fisiche.
AVVERTENZA
il simbolo indica che la mancata osservanza delle relative misure di sicurezza può causare la morte o gravi
lesioni fisiche.
CAUTELA
indica che la mancata osservanza delle relative misure di sicurezza può causare lesioni fisiche non gravi.
ATTENZIONE
indica che la mancata osservanza delle relative misure di sicurezza può causare danni materiali.
Nel caso in cui ci siano più livelli di rischio l'avviso di pericolo segnala sempre quello più elevato. Se in un avviso
di pericolo si richiama l'attenzione con il triangolo sul rischio di lesioni alle persone, può anche essere
contemporaneamente segnalato il rischio di possibili danni materiali.
Personale qualificato
Il prodotto/sistema oggetto di questa documentazione può essere adoperato solo da personale qualificato per il
rispettivo compito assegnato nel rispetto della documentazione relativa al compito, specialmente delle avvertenze
di sicurezza e delle precauzioni in essa contenute. Il personale qualificato, in virtù della sua formazione ed
esperienza, è in grado di riconoscere i rischi legati all'impiego di questi prodotti/sistemi e di evitare possibili
pericoli.
Uso conforme alle prescrizioni di prodotti Siemens
Si prega di tener presente quanto segue:
AVVERTENZA
I prodotti Siemens devono essere utilizzati solo per i casi d’impiego previsti nel catalogo e nella rispettiva
documentazione tecnica. Qualora vengano impiegati prodotti o componenti di terzi, questi devono essere
consigliati oppure approvati da Siemens. Il funzionamento corretto e sicuro dei prodotti presuppone un trasporto,
un magazzinaggio, un’installazione, un montaggio, una messa in servizio, un utilizzo e una manutenzione
appropriati e a regola d’arte. Devono essere rispettate le condizioni ambientali consentite. Devono essere
osservate le avvertenze contenute nella rispettiva documentazione.
Marchio di prodotto
Tutti i nomi di prodotto contrassegnati con ® sono marchi registrati della Siemens AG. Gli altri nomi di prodotto
citati in questo manuale possono essere dei marchi il cui utilizzo da parte di terzi per i propri scopi può violare i
diritti dei proprietari.
Esclusione di responsabilità
Abbiamo controllato che il contenuto di questa documentazione corrisponda all'hardware e al software descritti.
Non potendo comunque escludere eventuali differenze, non possiamo garantire una concordanza perfetta. Il
contenuto di questa documentazione viene tuttavia verificato periodicamente e le eventuali correzioni o modifiche
vengono inserite nelle successive edizioni.
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANIA
A5E02299792D AD
Ⓟ 03/2013 Con riserva di eventuali modifiche tecniche
Copyright © Siemens AG 2010 - 2013.
Tutti i diritti riservati
Modifiche nel presente manuale
Modifiche sostanziali rispetto al manuale edizione 04/2012
Nuovi Power Module
•
Power Module PM230 FSD … FSF con grado di
protezione IP20
•
Power Module PM230 FSD … FSF in tecnica passante
•
Abilitazione del funzionamento delle Control Unit
CU240B/E-2 con il Power Module PM340 1AC
nel capitolo
Installazione del Power Module
(Pagina 40)
Nuove funzioni nel firmware V4.6
nel capitolo
Banda escludibile per gli ingressi analogici
Ingressi analogici (Pagina 94)
Aggiornamento del firmware della Control Unit
Upgrade del firmware (Pagina 303)
Downgrade del firmware (Pagina 305)
Ethernet/IP
Comunicazione tramite Ethernet/IP
(Pagina 133)
La sezione Versione firmware 4.6 (Pagina 360) fornisce una panoramica di tutte le nuove
funzioni e delle funzioni modificate nel firmware V4.6.
Descrizioni rielaborate
nel capitolo
Riepilogo delle avvertenze di sicurezza generali integrazione
Avvertenze di sicurezza (Pagina 15)
Generatore di rampa
Generatore di rampa (Pagina 191)
•
Tempi di arrotondamento - integrazione
•
Modifica dei tempi di accelerazione e decelerazione
durante il funzionamento
Collaudo della funzione di sicurezza Safe Torque Off (STO)
Collaudo - Conclusione della messa in
servizio (Pagina 265)
Funzioni PROFIenergy del convertitore - integrazione
Profilo PROFIenergy tramite
PROFINET (Pagina 130)
Funzione "Visualizzazione del risparmio di energia" del
convertitore - integrazione
Visualizzazione del risparmio
energetico (Pagina 218)
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
5
Modifiche nel presente manuale
Convertitori con le Control Unit CU240B-2 e CU240E-2
6
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Indice del contenuto
Modifiche nel presente manuale.................................................................................................. 5
1
Avvertenze di sicurezza............................................................................................................15
2
Introduzione ...........................................................................................................................19
3
4
5
2.1
Informazioni sul presente manuale ......................................................................................... 19
2.2
Guida a questo manuale ........................................................................................................ 20
Descrizione ............................................................................................................................21
3.1
Identificare il convertitore........................................................................................................ 21
3.2
Control Unit ............................................................................................................................ 22
3.3
3.3.1
Power Module ........................................................................................................................ 23
Accessori per il montaggio e la schermatura ........................................................................... 25
3.4
3.4.1
3.4.2
3.4.3
3.4.4
3.4.5
3.4.6
Componenti di sistema per i Power Module ............................................................................ 27
Filtro di rete ............................................................................................................................ 27
Bobina di rete ......................................................................................................................... 28
Bobina di uscita ...................................................................................................................... 29
Filtro sinusoidale .................................................................................................................... 31
Resistenza di frenatura........................................................................................................... 33
Brake Relay ........................................................................................................................... 34
3.5
Utensili per la messa in servizio del convertitore ..................................................................... 35
Installazione ...........................................................................................................................37
4.1
Panoramica dell'installazione del convertitore ......................................................................... 37
4.2
Installazione delle bobine, dei filtri e delle resistenze di frenatura ............................................ 38
4.3
4.3.1
4.3.2
4.3.3
Installazione del Power Module .............................................................................................. 40
Dimensioni, maschere di foratura, distanze minime e coppie di serraggio ............................... 41
Disegni quotati PT .................................................................................................................. 43
Collegamento della rete, del motore e dei componenti del convertitore ................................... 44
4.4
4.4.1
4.4.2
4.4.3
4.4.4
4.4.4.1
4.4.4.2
4.4.5
4.4.6
Installazione della Control Unit ............................................................................................... 50
Interfacce, connettori, interruttori, morsettiere e LED della CU ................................................ 51
Morsettiere delle Control Unit CU240B-2 ................................................................................ 52
Morsettiere delle Control Unit CU240E-2 ................................................................................ 53
Selezione delle impostazioni adeguate delle interfacce........................................................... 55
Preimpostazioni e cablaggio dei convertitori con le Control Unit CU240B-2............................. 55
Preimpostazioni e cablaggio dei convertitori con le Control Unit CU240E-2............................. 57
Cablaggio della morsettiera .................................................................................................... 61
Assegnazione delle interfacce del bus di campo ..................................................................... 62
4.5
4.5.1
4.5.2
Collegamento del convertitore secondo le norme EMC ........................................................... 63
Collegamento dei convertitori in conformità EMC .................................................................... 63
Eliminazione di interferenze elettromagnetiche (EMI).............................................................. 63
Messa in servizio.....................................................................................................................67
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
7
Indice del contenuto
6
7
5.1
Linee guida per la messa in servizio ........................................................................................67
5.2
5.2.1
5.2.2
5.2.3
5.2.4
5.2.5
Preparazione della messa in servizio.......................................................................................68
Esempi di cablaggio per le impostazioni di fabbrica .................................................................69
Il motore è adatto al convertitore? ...........................................................................................71
Preimpostazione del controllo da convertitore..........................................................................72
Controllo U/f o regolazione vettoriale (numero di giri/coppia)?..................................................73
Definizione di altri requisiti dell'applicazione.............................................................................74
5.3
Ripristino delle impostazioni di fabbrica ...................................................................................75
5.4
5.4.1
5.4.2
5.4.2.1
5.4.2.2
5.4.2.3
5.4.2.4
5.4.2.5
Messa in servizio di base ........................................................................................................76
Messa in servizio di base con l'Operator Panel BOP-2.............................................................76
Messa in servizio di base con STARTER.................................................................................81
Adattamento delle interfacce ...................................................................................................82
Creazione del progetto STARTER ...........................................................................................84
Passaggio online e avvio del wizard per la messa in servizio di base .......................................84
Esecuzione della messa in servizio di base .............................................................................85
Identificazione dei dati del motore ...........................................................................................86
Adattamento della morsettiera .................................................................................................. 89
6.1
Ingressi digitali ........................................................................................................................90
6.2
Ingresso fail-safe .....................................................................................................................92
6.3
Uscite digitali ...........................................................................................................................93
6.4
Ingressi analogici ....................................................................................................................94
6.5
Uscite analogiche ....................................................................................................................99
Configurazione del bus di campo..............................................................................................103
7.1
7.1.1
7.1.2
7.1.3
7.1.4
7.1.5
Comunicazione tramite PROFINET .......................................................................................104
Cosa occorre per la comunicazione tramite PROFINET?.......................................................104
Collegamento del convertitore su PROFINET ........................................................................105
Configurazione della comunicazione con il controllore ...........................................................106
Selezione del telegramma - Procedura ..................................................................................106
Attivazione della diagnostica tramite il controllore ..................................................................107
7.2
7.2.1
7.2.2
7.2.3
7.2.4
7.2.5
Comunicazione tramite PROFIBUS .......................................................................................107
Cosa occorre per la comunicazione tramite PROFIBUS?.......................................................107
Collegamento del convertitore su PROFIBUS........................................................................108
Configurazione della comunicazione con il controllore ...........................................................109
Impostazione degli indirizzi ....................................................................................................109
Selezione del telegramma - Procedura ..................................................................................110
7.3
7.3.1
7.3.1.1
7.3.1.2
7.3.1.3
7.3.1.4
7.3.1.5
7.3.2
Profilo PROFIdrive per PROFIBUS e PROFINET ..................................................................111
Comunicazione ciclica ...........................................................................................................111
Parole di comando e di stato 1 ..............................................................................................113
Parole di comando e di stato 3 ..............................................................................................116
Ampliamento dei telegrammi e modifica dell'interconnessione dei segnali.............................. 118
Struttura dati del canale parametri .........................................................................................119
Traffico trasversale................................................................................................................124
Comunicazione aciclica .........................................................................................................125
7.4
7.4.1
Profilo PROFIenergy tramite PROFINET ...............................................................................130
PROFIenergy ........................................................................................................................130
Convertitori con le Control Unit CU240B-2 e CU240E-2
8
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Indice del contenuto
8
7.5
7.5.1
7.5.2
7.5.3
7.5.4
7.5.5
7.5.6
Comunicazione tramite Ethernet/IP .......................................................................................133
Collegamento del convertitore a Ethernet/IP ..........................................................................133
Cosa occorre per la comunicazione tramite Ethernet/IP? .......................................................134
Impostazioni di comunicazione per Ethernet/IP......................................................................134
Altre impostazioni quando si lavora con il profilo AC/DC Drive ...............................................135
Oggetti supportati ..................................................................................................................136
Creazione di un modulo I/O generico .....................................................................................145
7.6
7.6.1
7.6.2
7.6.2.1
7.6.2.2
7.6.2.3
7.6.2.4
7.6.2.5
7.6.2.6
7.6.3
7.6.3.1
7.6.3.2
7.6.3.3
7.6.3.4
7.6.3.5
Comunicazione tramite RS485 ..............................................................................................146
Integrazione del convertitore tramite l'interfaccia RS485 in un sistema a bus .........................146
Comunicazione tramite USS..................................................................................................147
Impostazioni di base per la comunicazione ............................................................................147
Struttura del telegramma .......................................................................................................148
Settore dei dati utili del telegramma USS ...............................................................................149
Canale parametri USS...........................................................................................................150
Canale dati di processo USS (PZD).......................................................................................155
Sorveglianza telegramma ......................................................................................................156
Comunicazione tramite Modbus RTU ....................................................................................158
Impostazioni di base per la comunicazione ............................................................................159
Telegramma Modbus RTU ....................................................................................................161
Velocità di trasmissione e tabelle di mappatura......................................................................161
Accesso in scrittura e lettura tramite FC 03 e FC 06 ..............................................................165
Sequenza di comunicazione ..................................................................................................167
Impostazione delle funzioni ..................................................................................................... 169
8.1
Panoramica delle funzioni del convertitore .............................................................................169
8.2
8.2.1
8.2.2
8.2.3
8.2.4
8.2.5
8.2.6
8.2.7
8.2.8
8.2.9
Controllo da convertitore .......................................................................................................171
Inserzione/disinserzione del motore.......................................................................................171
Controllo del convertitore tramite ingressi digitali ...................................................................173
Controllo a due fili, metodo 1 .................................................................................................174
Controllo a due fili, metodo 2 .................................................................................................175
Controllo a due fili, metodo 3 .................................................................................................176
Controllo a tre fili, metodo 1 ...................................................................................................177
Controllo a tre fili, metodo 2 ...................................................................................................178
Funzionamento a impulsi del motore (funzione JOG) .............................................................179
Commutazione del controllo da convertitore (set di dati di comando) .....................................180
8.3
8.3.1
8.3.2
8.3.3
8.3.4
8.3.5
Valori di riferimento ...............................................................................................................182
Panoramica ...........................................................................................................................182
Ingresso analogico come sorgente del valore di riferimento ...................................................183
Impostazione del numero di giri del motore tramite il bus di campo ........................................183
Potenziometro motore come sorgente del valore di riferimento ..............................................184
Numero di giri fisso come sorgente del valore di riferimento...................................................186
8.4
8.4.1
8.4.2
8.4.3
8.4.4
8.4.5
8.4.6
Preparazione del valore di riferimento....................................................................................188
Panoramica della preparazione del valore di riferimento ........................................................188
Inversione del valore di riferimento ........................................................................................188
Blocco del senso di rotazione ................................................................................................189
Numero di giri minimo............................................................................................................189
Numero di giri massimo .........................................................................................................190
Generatore di rampa .............................................................................................................191
8.5
8.5.1
Regolazione motore ..............................................................................................................196
Controllo U/f ..........................................................................................................................196
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
9
Indice del contenuto
8.5.1.1
8.5.1.2
8.5.1.3
8.5.2
8.5.2.1
8.5.2.2
8.5.2.3
8.5.2.4
Caratteristiche del controllo U/f..............................................................................................197
Selezione della caratteristica U/f............................................................................................198
Ottimizzazione con coppia di spunto elevata e sovraccarico breve ........................................ 199
Regolazione di velocità .........................................................................................................201
Caratteristiche della regolazione vettoriale senza encoder .....................................................201
Selezione della regolazione del motore .................................................................................202
Ottimizzazione del regolatore del numero di giri in un secondo momento............................... 203
Regolazione della coppia ......................................................................................................205
8.6
8.6.1
8.6.2
8.6.3
8.6.4
8.6.5
Funzioni di protezione ...........................................................................................................206
Sorveglianza della temperatura del convertitore ....................................................................206
Sorveglianza della temperatura del motore tramite sensore di temperatura............................ 207
Protezione del motore mediante calcolo della temperatura del motore ................................... 210
Protezione da sovracorrente..................................................................................................210
Limitazione della tensione max. del circuito intermedio ..........................................................211
8.7
8.7.1
8.7.1.1
8.7.1.2
8.7.1.3
8.7.1.4
8.7.2
8.7.3
8.7.3.1
8.7.3.2
8.7.3.3
8.7.3.4
8.7.3.5
8.7.3.6
8.7.4
8.7.4.1
8.7.4.2
8.7.5
8.7.5.1
8.7.5.2
8.7.5.3
8.7.6
8.7.7
8.7.8
Funzioni specifiche dell'applicazione .....................................................................................213
Commutazione unità .............................................................................................................213
Commutazione della norma motori ........................................................................................215
Commutazione del sistema di unità .......................................................................................216
Commutazione delle grandezze di processo per il regolatore PID .......................................... 216
Commutazione delle unità con STARTER .............................................................................217
Visualizzazione del risparmio energetico ...............................................................................218
Funzioni di frenatura del convertitore .....................................................................................220
Metodi di frenatura elettrici ....................................................................................................220
Frenatura in corrente continua...............................................................................................222
Frenatura Compound ............................................................................................................225
Frenatura dinamica ...............................................................................................................226
Frenatura con recupero in rete ..............................................................................................230
Freno di stazionamento motore .............................................................................................230
Reinserzione e riavviamento al volo ......................................................................................236
Riavviamento al volo - Inserzione a motore funzionante ........................................................236
Inserzione automatica ...........................................................................................................237
Regolatore di tecnologia PID .................................................................................................241
Panoramica...........................................................................................................................241
Impostazione del regolatore ..................................................................................................242
Ottimizzazione regolatore ......................................................................................................243
Sorveglianza della coppia di carico (protezione dell'impianto) ................................................245
Sorveglianza del numero di giri tramite ingresso digitale ........................................................247
Funzioni logiche e aritmetiche mediante blocchi funzionali..................................................... 249
8.8
8.8.1
8.8.2
8.8.3
8.8.3.1
8.8.3.2
8.8.3.3
8.8.3.4
8.8.3.5
8.8.3.6
8.8.3.7
8.8.3.8
8.8.3.9
Funzione di sicurezza Safe Torque Off (STO)........................................................................253
Descrizione delle funzioni ......................................................................................................253
Requisito per l'utilizzo di STO ................................................................................................254
Messa in servizio di STO .......................................................................................................254
Tool di messa in servizio .......................................................................................................254
Protezione delle impostazioni da modifiche non autorizzate...................................................255
Ripristino dei parametri delle funzioni di sicurezza alle impostazioni di fabbrica ..................... 255
Modifica impostazioni ............................................................................................................256
Interconnessione del segnale "STO attivo" ............................................................................257
Impostazione del filtro per ingressi fail-safe ...........................................................................258
Impostazione della dinamizzazione forzata ............................................................................261
Attiva impostazioni ................................................................................................................263
Controllo dell'assegnazione degli ingressi digitali ...................................................................264
Convertitori con le Control Unit CU240B-2 e CU240E-2
10
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Indice del contenuto
8.8.3.10 Collaudo - Conclusione della messa in servizio......................................................................265
8.9
9
10
11
12
Commutazione tra impostazioni diverse.................................................................................270
Salvataggio dei dati e messa in servizio di serie ......................................................................... 273
9.1
9.1.1
9.1.2
9.1.3
Salvataggio e trasferimento delle impostazioni con la scheda di memoria ..............................274
Salvataggio delle impostazioni sulla scheda di memoria ........................................................275
Trasferimento dell'impostazione dalla scheda di memoria ......................................................277
Rimozione sicura scheda di memoria ....................................................................................279
9.2
Salvataggio e trasferimento delle impostazioni con STARTER ...............................................282
9.3
Salvataggio e trasferimento delle impostazioni con un Operator Panel...................................284
9.4
Altre possibilità di salvataggio delle impostazioni ...................................................................285
9.5
9.5.1
9.5.2
9.5.2.1
9.5.2.2
9.5.2.3
Protezione in scrittura e protezione know-how .......................................................................286
Protezione in scrittura............................................................................................................288
Protezione know-how ............................................................................................................289
Impostazioni per la protezione know-how ..............................................................................290
Creazione di una lista eccezioni per la protezione know-how .................................................292
Sostituzione di apparecchi con protezione know-how attiva ...................................................293
Riparazione .......................................................................................................................... 295
10.1
Panoramica sulla sostituzione dei componenti del convertitore ..............................................295
10.2
Sostituzione della Control Unit con funzione di sicurezza abilitata ..........................................296
10.3
Sostituzione della Control Unit senza funzioni di sicurezza abilitate .......................................299
10.4
Sostituzione della Control Unit senza salvataggio dei dati ......................................................300
10.5
Sostituzione del Power Module con funzione di sicurezza abilitata .........................................301
10.6
Sostituzione del Power Module senza funzione di sicurezza abilitata .....................................302
10.7
Upgrade del firmware ............................................................................................................303
10.8
Downgrade del firmware........................................................................................................305
10.9
Correzione di un upgrade o un downgrade del firmware non riuscito......................................307
10.10
Se il convertitore non ha alcuna reazione ..............................................................................308
Avvisi, anomalie e messaggi di sistema..................................................................................... 311
11.1
Stati di funzionamento segnalati tramite LED.........................................................................311
11.2
Runtime di sistema ................................................................................................................313
11.3
Avvisi ....................................................................................................................................314
11.4
Anomalie ...............................................................................................................................317
11.5
Lista degli avvisi e delle anomalie ..........................................................................................322
Dati tecnici ........................................................................................................................... 331
12.1
Dati tecnici, Control Unit CU240B-2 .......................................................................................331
12.2
Dati tecnici, Control Unit CU240E-2 .......................................................................................333
12.3
12.3.1
Dati tecnici, Power Module ....................................................................................................336
Dati tecnici PM230 IP20 ........................................................................................................338
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
11
Indice del contenuto
12.3.1.1
12.3.1.2
12.3.2
12.3.2.1
12.3.2.2
12.3.3
12.3.3.1
12.3.3.2
12.3.4
12.3.4.1
12.3.5
12.3.5.1
A
Dati generali, PM230, IP20....................................................................................................338
Dati dipendenti dalla potenza, PM230, IP20 ..........................................................................339
Dati tecnici PM240 ................................................................................................................345
Dati generali, PM240 .............................................................................................................345
Dati dipendenti dalla potenza PM240 ....................................................................................346
Dati tecnici PM240-2 .............................................................................................................351
Dati generali, PM240-2..........................................................................................................351
Dati dipendenti dalla potenza PM240-2 .................................................................................352
Dati tecnici PM250 ................................................................................................................354
Dati dipendenti dalla potenza PM250 ....................................................................................355
Dati tecnici PM260 ................................................................................................................357
Dati dipendenti dalla potenza PM260 ....................................................................................358
Appendice ............................................................................................................................359
A.1
A.1.1
A.1.2
Funzioni nuove e ampliate.....................................................................................................359
Versione firmware 4.5 ...........................................................................................................359
Versione firmware 4.6 ...........................................................................................................360
A.2
Circuito a stella o a triangolo del motore ed esempi pratici .....................................................361
A.3
Parametri ..............................................................................................................................362
A.4
A.4.1
A.4.2
A.4.3
A.4.4
Uso dell'Operator Panel BOP-2 .............................................................................................364
Modifica delle impostazioni con il BOP-2 ...............................................................................365
Modifica dei parametri indicizzati ...........................................................................................366
Immissione diretta del numero e del valore di parametro .......................................................366
Non è possibile modificare un parametro ...............................................................................367
A.5
A.5.1
A.5.2
Uso di STARTER ..................................................................................................................368
Modifica impostazioni ............................................................................................................368
Ottimizzazione dell'azionamento con la funzione Trace .........................................................369
A.6
A.6.1
A.6.2
Interconnessione dei segnali nel convertitore ........................................................................372
Nozioni di base .....................................................................................................................372
Esempio................................................................................................................................374
A.7
A.7.1
A.7.1.1
A.7.1.2
A.7.1.3
A.7.2
A.7.2.1
A.7.2.2
A.7.2.3
A.7.2.4
A.7.3
A.7.3.1
A.7.3.2
A.7.4
A.7.5
Esempi applicativi .................................................................................................................376
Configurazione della comunicazione PROFIBUS in STEP 7 ..................................................376
Presupposto..........................................................................................................................376
Creazione di un progetto e di una rete STEP 7 ......................................................................376
Inserimento del convertitore nel progetto ...............................................................................377
Configurazione della comunicazione PROFINET in STEP 7 ..................................................379
Progettazione di controllore e convertitore in Config HW........................................................379
Creazione del riferimento per STARTER ...............................................................................382
Richiamo di STARTER e passaggio online ............................................................................383
Attivazione di messaggi di diagnostica tramite STEP 7 ..........................................................383
Esempi di programma STEP 7 ..............................................................................................384
Esempio di programma STEP 7 per la comunicazione ciclica ................................................385
Esempio di programma STEP 7 per la comunicazione aciclica .............................................. 387
Configurazione del traffico trasversale in STEP 7 ..................................................................391
Collegamento di ingressi digitali fail-safe ...............................................................................393
A.8
A.8.1
A.8.2
Documentazione per il collaudo delle funzioni di sicurezza ....................................................394
Documentazione della macchina ...........................................................................................394
Protocollo delle impostazioni per le funzioni di base, firmware V4.4 ... V4.6 ........................... 396
Convertitori con le Control Unit CU240B-2 e CU240E-2
12
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Indice del contenuto
A.9
Ulteriori informazioni sul convertitore .....................................................................................397
A.10
Errori e correzioni ..................................................................................................................399
Indice analitico ...................................................................................................................... 401
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
13
Indice del contenuto
Convertitori con le Control Unit CU240B-2 e CU240E-2
14
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvertenze di sicurezza
1
Utilizzo conforme alle prescrizioni
Il convertitore descritto nel presente manuale è un apparecchio per il comando dei motori
asincroni a bassa tensione. Il convertitore è destinato all'installazione in impianti elettrici o
macchine.
Il convertitore è omologato per l'impiego industriale e commerciale in reti industriali.
L'impiego in reti pubbliche richiede una diversa progettazione e/o ulteriori misure.
I dati tecnici e le informazioni relative alle condizioni di allacciamento sono riportati sulla
targhetta identificativa e nelle Istruzioni operative.
PERICOLO
Pericolo di morte per contatto con parti sotto tensione
Il contatto con parti sotto tensione può provocare la morte o lesioni gravi.
Tenere presente quanto segue:
• Gli interventi su apparecchiature elettriche devono essere effettuati solo da personale
qualificato.
• Per qualsiasi intervento sugli apparecchi, rispettare le regole di sicurezza specifiche dei
vari Paesi.
Al fine di garantire la sicurezza devono essere eseguite le seguenti sei operazioni:
1. Predisporre la disinserzione e informare tutte le persone interessate da questa
operazione.
2. Mettere la macchina fuori tensione:
– Spegnere la macchina.
– Attendere che sia trascorso il tempo di scarica indicato sulle targhette di avviso.
– Accertarsi che non vi sia tensione tra conduttore e conduttore e tra conduttore e
conduttore di protezione.
– Verificare che gli eventuali circuiti di tensione ausiliaria siano privi di tensione.
– Accertarsi che i motori non possano muoversi.
3. Identificare tutte le altre fonti di energia pericolose, come ad es. aria compressa, forza
idraulica o acqua.
4. Isolare o neutralizzare tutte le fonti di energia pericolose, ad es. chiudendo gli interruttori
o le valvole, creando un collegamento a terra o un cortocircuito.
5. Accertarsi che le fonti di energia non possano reinserirsi.
6. Accertarsi che la macchina sia completamente bloccata ... e che si tratti della macchina
giusta!
Una volta conclusi gli interventi necessari, ripristinare lo stato di pronto al funzionamento
ripetendo le operazioni nella sequenza inversa.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
15
Avvertenze di sicurezza
AVVERTENZA
Pericolo di morte per contatto con parti sotto tensione in caso di apparecchiature
danneggiate
In caso di apparecchiature danneggiate, sulla custodia o su singoli componenti possono
essere presenti tensioni pericolose.
• Durante il trasporto, il magazzinaggio e il funzionamento rispettare i valori limite
specificati nei dati tecnici.
• Non utilizzare apparecchiature danneggiate.
• Proteggere i componenti dagli imbrattamenti conduttivi, ad es. tramite il montaggio in un
armadio elettrico con grado di protezione IP54B secondo EN 60529.
Qualora sia possibile escludere la formazione di imbrattamenti conduttivi nel luogo di
installazione, è consentito anche un grado di protezione inferiore dell'armadio elettrico.
AVVERTENZA
Pericolo di vita dovuto al movimento imprevisto delle macchine in caso di impiego di
apparecchiature radio o telefoni cellulari
Se si utilizzano apparecchiature radio mobili o telefoni cellulari con potenza di emissione >
1 W a una distanza inferiore a circa 2 m dal convertitore, sugli apparecchi possono prodursi
interferenze in grado di compromettere la sicurezza funzionale delle macchine, provocare
lesioni personali o causare danni materiali.
• Spegnere le apparecchiature radio o i telefoni cellulari che si trovano nelle immediate
vicinanze del convertitore.
ATTENZIONE
Danni causati da campi elettrici o scariche elettrostatiche
I campi elettrici o le scariche elettrostatiche possono danneggiare singoli componenti,
circuiti integrati, unità o dispositivi e quindi provocare danni funzionali.
• Per l'imballaggio, l'immagazzinaggio, il trasporto e la spedizione dei componenti, delle
unità o dei dispositivi utilizzare solo l'imballaggio originale o altri materiali adatti come ad
es. gommapiuma conduttiva o pellicola di alluminio.
• Prima di toccare i componenti, le unità o i dispositivi occorre adottare uno dei seguenti
provvedimenti di messa a terra:
– Indossare un bracciale ESD
– Indossare scarpe ESD o fascette ESD per la messa a terra nei settori ESD con
pavimento conduttivo
• Appoggiare i componenti elettronici, le unità o gli apparecchi solo su supporti conduttivi,
ad es. tavoli con rivestimento ESD, materiale espanso ESD conduttivo, sacchetti per
imballaggio ESD o contenitori di trasporto ESD.
Convertitori con le Control Unit CU240B-2 e CU240E-2
16
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvertenze di sicurezza
CAUTELA
Pericolo di ustioni a causa di temperature superficiali elevate
Durante il funzionamento e subito dopo la disinserzione dei convertitore è possibile che le
superfici dell'apparecchio raggiungano temperature elevate. Il contatto con la superficie
può provocare ustioni.
• Non toccare l'apparecchio durante il funzionamento.
• Dopo aver disinserito il convertitore, attendere che l'apparecchio si sia raffreddato prima
di toccarlo.
Rischi residui di sistemi di azionamento (Power Drive System)
I componenti per il controllo e l'azionamento di un sistema di azionamento sono omologati
per l'impiego industriale e commerciale in reti industriali. L'impiego in reti pubbliche richiede
una diversa progettazione e/o ulteriori misure.
Questi componenti possono funzionare solo all'interno di involucri chiusi o dentro quadri
elettrici sovraordinati con coperchi protettivi chiusi e congiuntamente a tutti i dispositivi di
protezione previsti.
Questi componenti possono essere manipolati solo da personale qualificato e addestrato,
che conosca e rispetti tutte le avvertenze di sicurezza riportate sui componenti e nella
relativa documentazione tecnica per l'utente.
Nell'ambito della valutazione dei rischi della macchina, da eseguire conformemente alle
prescrizioni locali (ad es. Direttiva Macchine CE), il costruttore della macchina deve
considerare i seguenti rischi residui derivanti dai componenti per il controllo e l'azionamento
di un sistema di azionamento:
1. Movimenti indesiderati di parti della macchina motorizzate durante la messa in servizio, il
funzionamento, la manutenzione e la riparazione, dovuti ad esempio a
– Errori hardware e/o software nei sensori, nel controllo, negli attuatori e nella tecnica di
collegamento
– Tempi di reazione del controllo e dell'azionamento
– Funzionamento e/o condizioni ambientali non conformi alla specifica
– Condensa / imbrattamenti conduttivi
– Errori durante la parametrizzazione, la programmazione, il cablaggio e il montaggio
– Utilizzo di apparecchiature radio / telefoni cellulari nelle immediate vicinanze del
controllo
– Influenze esterne / danneggiamenti
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
17
Avvertenze di sicurezza
2. In caso di guasto possono verificarsi temperature eccezionalmente elevate, incluso fuoco
aperto, all'interno e all'esterno del convertitore, nonché emissioni di luce, rumore,
particelle, gas etc., ad esempio a causa di:
– Guasto di componenti
– Errori di software
– Funzionamento e/o condizioni ambientali non conformi alla specifica
– Influenze esterne / danneggiamenti
I convertitori con grado di protezione Type / IP20 devono essere installati in un quadro
elettrico in metallo (oppure essere protetti con un altro provvedimento equivalente) in
modo tale da impedire il contatto con il fuoco all'interno e all'esterno del convertitore.
3. Tensioni di contatto pericolose, ad esempio dovute a
– Guasto di componenti
– Influenza in caso di cariche elettrostatiche
– Induzione di tensioni con motori in movimento
– Funzionamento e/o condizioni ambientali non conformi alla specifica
– Condensa / imbrattamenti conduttivi
– Influenze esterne / danneggiamenti
4. Campi elettrici, magnetici ed elettromagnetici in condizioni di esercizio che ad es.
possono essere pericolosi per portatori di pacemaker, impianti od oggetti metallici in caso
di distanza insufficiente
5. Rilascio di sostanze ed emissioni dannose per l'ambiente in caso di utilizzo non
appropriato e/o smaltimento non corretto dei componenti
Nota
I componenti vanno protetti dagli imbrattamenti conduttivi, ad es. tramite il montaggio in un
quadro elettrico con grado di protezione IP54 secondo IEC 60529 risp. NEMA 12.
Qualora sia possibile escludere la formazione di imbrattamenti conduttivi nel luogo di
installazione, è consentito anche un grado di protezione inferiore del quadro elettrico.
Per ulteriori informazioni sui rischi residui derivanti dai componenti di un sistema di
azionamento, consultare la Documentazione tecnica per l'utente ai capitoli relativi.
Convertitori con le Control Unit CU240B-2 e CU240E-2
18
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
2
Introduzione
2.1
Informazioni sul presente manuale
A chi sono destinate le istruzioni operative e qual è il loro scopo?
Le presenti istruzioni operative sono rivolte principalmente ai montatori, ai responsabili della
messa in servizio e agli operatori delle macchine. Le istruzioni operative descrivono le
apparecchiature e i relativi componenti, e forniscono le istruzioni necessarie per il montaggio
a regola d'arte, il collegamento, la configurazione e la messa in servizio del convertitore.
Qual è il contenuto di queste istruzioni operative?
Le istruzioni operative sono una raccolta di tutte le informazioni necessarie per garantire un
funzionamento regolare e sicuro del convertitore.
Le informazioni contenute nelle istruzioni operative permettono agli utenti di utilizzare le
applicazioni standard e di eseguire una messa in servizio efficiente di un azionamento. Dove
lo si è ritenuto utile, sono state aggiunte informazioni rivolte agli utenti che non conoscono a
fondo il sistema.
Queste istruzioni operative contengono inoltre informazioni relative ad applicazioni speciali.
Tali informazioni sono tuttavia presentate in forma sintetica, dal momento che la
progettazione e la parametrizzazione di questo tipo di applicazioni richiedono conoscenze
tecniche approfondite. Questo vale, ad esempio, per il funzionamento con sistemi di bus di
campo e con applicazioni orientate alla sicurezza.
Cosa significano i simboli usati nel manuale?
Qui iniziano le istruzioni per la manipolazione.
Qui finiscono le istruzioni per la manipolazione.
Il testo che segue si riferisce al Basic Operator Panel BOP-2.
Il testo che segue si riferisce all'uso di un PC con STARTER.
Esempi di simboli delle funzioni del convertitore.
Uno di questi simboli precede la descrizione della corrispondente
funzione del convertitore.
Vedere anche: Panoramica delle funzioni del convertitore
(Pagina 169).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
19
Introduzione
2.2 Guida a questo manuale
2.2
Guida a questo manuale
In questo manuale si trovano informazioni di base relative al convertitore e una descrizione
completa della messa in servizio:
① Qui si trovano le informazioni per l'hardware
del convertitore e i tool di messa in servizio:
• Identificare il convertitore (Pagina 21)
② • Panoramica dell'installazione del
convertitore (Pagina 37)
Tutte le informazioni sulla messa in servizio del
convertitore sono contenute nei seguenti
capitoli:
③ • Messa in servizio di base (Pagina 76)
• Adattamento della morsettiera (Pagina 89)
• Configurazione del bus di campo
(Pagina 103)
• Impostazione delle funzioni (Pagina 169)
④ • Salvataggio dei dati e messa in servizio di
serie (Pagina 273)
⑤ Le informazioni sulla manutenzione e la
diagnostica del convertitore sono contenute
nei seguenti capitoli:
• Riparazione (Pagina 295)
• Avvisi, anomalie e messaggi di sistema
(Pagina 311)
⑥ I dati tecnici principali del convertitore si
trovano in questo capitolo:
• Dati tecnici (Pagina 331)
⑦ L'appendice descrive le informazioni di base e
contiene alcuni esempi:
• Appendice (Pagina 359)
Convertitori con le Control Unit CU240B-2 e CU240E-2
20
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
3
Descrizione
Tutti i dati di potenza si riferiscono ai valori nominali o alla potenza per il funzionamento con
carico ridotto (LO).
3.1
Identificare il convertitore
Componenti principali del convertitore
Ogni convertitore della famiglia SINAMICS
G120 è composto da una Control Unit e da un
Power Module.
• La Control Unit comanda e sorveglia il
Power Module e il motore collegato.
• I Power Module gestiscono l'alimentazione
del motore nella fascia di potenza da
0,37 kW a 250 kW.
Sulla targhetta identificativa del Power Module (①) sono riportati i seguenti dati:
● Designazione:
● Dati tecnici:
ad es. Power Module 240
Tensione, corrente e potenza
● Numero di ordinazione:
● Versione:
ad es. 6SL3224-0BE13-7UA0
ad es. A02
Sulla targhetta identificativa della Control Unit (②) sono riportati i seguenti dati:
● Designazione:
● Numero di ordinazione:
● Versione:
ad es. Control Unit CU240E-2 DP-F
ad es. 6SL3244-0BB13-1PA0
ad es. A02 (hardware)
Altri componenti del convertitore
Per poter adattare il convertitore alle diverse applicazioni e condizioni ambientali sono
disponibili i seguenti componenti:
● Filtro di rete (Pagina 27)
● Bobina di rete (Pagina 28)
● Bobina di uscita (Pagina 29)
● Filtro sinusoidale (Pagina 31)
● Resistenza di frenatura (Pagina 33)
● Brake Relay per il comando di un freno di stazionamento motore (Pagina 34).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
21
Descrizione
3.2 Control Unit
3.2
Control Unit
Tabella 3- 1
Control Unit CU240B-2 …
Le Control Unit CU240B-2 si differenziano per il tipo di bus di campo.
Designazione
CU240B-2
CU240B-2 DP
Numero di
ordinazione
6SL3244-0BB00-1BA1
6SL3244-0BB00-1PA1
Bus di campo
USS, Modbus RTU
PROFIBUS DP
Tabella 3- 2 Control Unit CU240E-2 …
Le Control Unit CU240E-2 , a differenza delle Control Unit CU240B-2 , hanno una morsettiera
avanzata e funzioni di sicurezza integrate.
Le Control Unit CU240E-2 si differenziano per il tipo di bus di campo e per l'ampiezza delle funzioni
di sicurezza integrate.
Designazione
CU240E-2
CU240E-2 F
CU240E-2 DP
CU240E-2
DP-F
CU240E-2 PN
CU240E-2
PN-F
Numero di
ordinazione
6SL32440BB12-1BA1
6SL32440BB13-1BA1
6SL32440BB12-1PA1
6SL32440BB13-1PA1
6SL32440BB12-1FA0
6SL32440BB13-1FA0
Bus di campo
USS, Modbus
RTU
USS, Modbus
RTU
PROFIBUS D
P
PROFIBUS D
P con
PROFIsafe
PROFINET IO
PROFINET IO
con
PROFIsafe
Funzioni di sicurezza
integrate
Funzioni di
base
Funzioni
ampliate
Funzioni di
base
Funzioni
ampliate
Funzioni di
base
Funzioni
ampliate
Kit di collegamento della schermatura per Control Unit
Il kit di collegamento della schermatura è un componente opzionale. Il kit di collegamento
della schermatura comprende i seguenti componenti:
● Piastra di schermatura
● Elementi per un supporto ottimale della schermatura e lo scarico del tiro per i cavi di
segnale e comunicazione.
Tabella 3- 3
Numeri di ordinazione
Kit di collegamento della schermatura 2 per le Control Unit CU240B-2 6SL3264-1EA00-0HA0
e CU240E-2 con tutte le interfacce di bus di campo tranne PROFINET.
Kit di collegamento della schermatura 3 per le Control Unit CU230P-2
e CU240E-2 con interfaccia PROFINET.
6SL3264-1EA00-0HB0
Convertitori con le Control Unit CU240B-2 e CU240E-2
22
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Descrizione
3.3 Power Module
3.3
Power Module
Quale Power Module si può utilizzare con la Control Unit?
Tabella 3- 4
Combinazioni consentite di Control Unit e Power Module
Control Unit
Power Module
PM340 1AC
PM230 IP20 e in tecnica
passante
PM240
PM240-2
PM250
PM260
CU240B-2…
---
✓
✓
✓
✓
✓
CU240E-2…
✓
✓
✓
✓
✓
✓
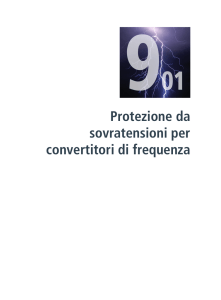
Figura 3-1
Power Module con grado di protezione IP20 FSA … FSGX
Figura 3-2
Power Module con tecnica passante (Push Through) FSA … FSC
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
23
Descrizione
3.3 Power Module
PM230, 3 AC 400 V - Campo di impiego di pompe e ventilatori
Il Power Module PM230 esiste senza filtro o con filtro di rete integrato di classe A.
Serie di numeri di ordinazione:
● IP20:
6SL3210-1NE…
● Push through
6SL3211-1NE…
Grandezza costruttiva
Campo di potenza (kW), IP20
Campo di potenza (kW), PT
FSA
FSB
FSC
FSD
FSE
FSF
FSGX
0,37 … 3
4 … 7,5
11 … 18,5
22 … 37
45 … 55
75 … 90
---
3
7,5
18,5
---
---
---
---
PM340, 1 AC 200 V - Campo di impiego delle applicazioni standard
Il Power Module PM340 esiste senza filtro o con filtro di rete integrato di classe A con grado
di protezione IP20. I PM340 consentono la frenatura dinamica tramite una resistenza di
frenatura esterna.
Serie di numeri di ordinazione: 6SL3210-1SB1…
Grandezza costruttiva
Campo di potenza (kW)
FSA
FSB
FSC
FSD
FSE
FSF
FSGX
0,12 … 0,7
5
--
--
--
--
--
---
PM240, 3 AC 400 V - Campo di impiego delle applicazioni standard
Il Power Module PM240 esiste senza filtro o con filtro di rete integrato di classe A con grado
di protezione IP20. I PM240 consentono la frenatura dinamica tramite una resistenza di
frenatura esterna.
Serie di numeri di ordinazione:
Grandezza costruttiva
Campo di potenza (kW)
6SL3224-0BE… e 6SL3224-0XE…
FSA
FSB
FSC
FSD
FSE
FSF
FSGX
0,37 … 1,5
2,2 … 4
7,5 … 15
18,5 … 30
37 … 45
55 … 132
160 … 250
PM240-2, 3 AC 400 V - Campo di impiego di applicazioni standard di seconda generazione
I Power Module PM240-2 sono disponibili senza filtro o con filtro di rete integrato di classe A
e supportano la frenatura dinamica tramite una resistenza di frenatura esterna.
Serie di numeri di ordinazione:
● IP20:
6SL3210-1PE…
● Push through
Grandezza costruttiva
6SL3211-1PE…
FSA
FSB
FSC
FSD
FSE
FSF
FSGX
Campo di potenza (kW), IP20
0,55 … 3
--
--
--
--
--
--
Campo di potenza (kW), PT
2,2 … 3
--
--
--
--
--
--
Convertitori con le Control Unit CU240B-2 e CU240E-2
24
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Descrizione
3.3 Power Module
PM250, 3 AC 400 V - Campo di impiego delle applicazioni con recupero in rete
I Power Module PM250 esistono senza filtro o con filtro di rete integrato di Classe A nel
grado di protezione IP20. I PM250 supportano il funzionamento dinamico con recupero di
energia nella rete.
Campo dei numeri di ordinazione, IP20:
Grandezza costruttiva
Campo di potenza (kW)
6SL3225-0BE …
FSA
FSB
FSC
FSD
FSE
FSF
FSGX
---
---
7,5 … 15
18,5 … 30
37 … 45
55 … 90
---
PM260, 3 AC 690 V - Campo di impiego di applicazioni con recupero in rete
Il Power Module PM260 esiste senza filtro o con filtro di rete integrato di classe A con grado
di protezione IP20. Sul lato motore è montato un filtro sinusoidale. I PM260 supportano la
frenatura dinamica con recupero di energia nella rete.
Serie di numeri di ordinazione, IP20: 6SL3225-0BH…
Grandezza costruttiva
Campo di potenza (kW)
3.3.1
FSA
FSB
FSC
FSD
FSE
FSF
FSGX
---
---
---
11 … 18,5
---
30 … 55
---
Accessori per il montaggio e la schermatura
Kit di collegamento della schermatura
Il kit di collegamento della schermatura offre un supporto
ottimale per la schermatura e funge da sistema di scarico
del tiro per cavi di rete e motore. Il kit comprende la piastra
di schermatura e una serie di fascette dentellate dotate di
viti.
Nota
Per i Power Module PM230 e PM240-2 il kit di collegamento della schermatura è parte
integrante della fornitura.
Per i Power Module PM240, PM250 e PM260, il kit per il collegamento della schermatura è
un componente opzionale.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
25
Descrizione
3.3 Power Module
Adattatore per il montaggio su guide profilate DIN per PM240, PM250 e PM260, grandezze
costruttive FSA e FSB
Con l'adattatore per il montaggio su guide profilate è possibile montare il Power Module su
due guide profilate con un interasse di 100 mm.
Numeri di ordinazione per kit di collegamento della schermatura e adattatore per guide profilate DIN
Grandezza
costruttiva
Kit di collegamento della schermatura per Power Module
Adattatore per il montaggio su
guida profilata DIN
PM240, PM250
PM260
FSA
6SL3262-1AA00-0BA0
-
6SL3262-1BA00-0BA0
FSB
6SL3262-1AB00-0DA0
-
6SL3262-1BB00-0BA0
FSC
6SL3262-1AC00-0DA0
-
-
FSD
6SL3262-1AD00-0DA0
6SL3262-1FD00-0CA0
-
FSE
6SL3262-1AD00-0DA0
-
-
FSF
6SL3262-1AF00-0DA0
6SL3262-1FF00-0CA0
-
Convertitori con le Control Unit CU240B-2 e CU240E-2
26
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Descrizione
3.4 Componenti di sistema per i Power Module
3.4
Componenti di sistema per i Power Module
3.4.1
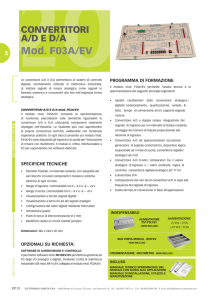
Filtro di rete
Con un filtro di rete
un convertitore
raggiunge una
classe di
soppressione delle
interferenze radio
superiore. Per i
convertitori con filtro
di rete integrato non
è necessario un
filtro esterno.
Esempi:
Filtro di rete sovrapponibile per
Power Module PM240 FSA Filtro di rete per Power Module PM240
FSGX
Filtri di rete esterni per PM240
Tabella 3- 5
Classe A secondo EN 55011: 2009
PM240, numero di ordinazione 6SL3224-…
Potenza
Filtro di rete in classe A
FSA
…0BE13-7UA0, …0BE15-5UA0,
…0BE17-5UA0, …0BE21-1UA0,
…0BE21-5UA0
0,37 kW … 1,5 kW
6SE6400-2FA00-6AD0
FSF
…0BE38-8UA0, …0BE41-1UA0
110 kW … 132 kW
6SL3203-0BE32-5AA0
FSGX
…0XE41-3UA0, …0XE41-6UA0
160 kW … 200 kW
6SL3000-0BE34-4AA0
…0XE42-0UA0
250 kW
6SL3000-0BE36-0AA0
PM240, numero di ordinazione 6SL3224-…
Potenza
Filtro di rete in classe B
FSA
…0BE13-7UA0, …0BE15-5UA0,
…0BE17-5UA0, …0BE21-1UA0,
…0BE21-5UA0
0,37 kW … 1,5 kW
6SE6400-2FB00-6AD0
FSB
…0BE22-2AA0, …0BE23-0AA0,
…0BE24-0AA0
2,2 kW … 4,0 kW
6SL3203-0BE21-6SA0
FSC
…0BE25-5UA0, …0BE27-5UA0,
…0BE31-1UA0
7,5 kW … 15,0 kW
6SL3203-0BD23-8SA0
PM250, numero di ordinazione 6SL3225-…
Potenza
Filtro di rete in classe B
FSC
7,5 kW … 15,0 kW
6SL3203-0BD23-8SA0
Tabella 3- 6
Classe B secondo EN 55011: 2009
Filtri di rete esterni per PM250
Tabella 3- 7
Classe B secondo EN 55011: 2009
…0BE25-5AA0, …0BE27-5AA0,
…0BE31-1AA0
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
27
Descrizione
3.4 Componenti di sistema per i Power Module
3.4.2
Bobina di rete
La bobina di rete aumenta la protezione contro la sovratensione, livella le armoniche e
compensa i buchi di commutazione. Per i Power Module elencati di seguito, l'impiego di una
bobina di rete consente di attenuare gli effetti citati.
ATTENZIONE
Danni del convertitore in caso di mancanza della bobina di rete
In funzione del tipo di convertitore e delle condizioni di rete, possono verificarsi i seguenti
casi:
• È necessario installare una bobina di rete
se il Power Module è indicato nell'elenco che segue e la tensione di cortocircuito relativa
della rete è inferiore a 1%
• È possibile installare una bobina di rete
se il Power Module è indicato nell'elenco che segue e la tensione di cortocircuito relativa
della rete non è nota
• Non si può installare una bobina di rete
se il Power Module non è indicato nell'elenco che segue.
Bobine di rete per PM240
PM240, numero di ordinazione 6SL3224-…
Potenza
Bobina di rete
FSA
…0BE13-7UA0, …0BE15-5UA0
0,37 kW … 0,55 kW
6SE6400-3CC00-2AD3
…0BE17-5UA0, …0BE21-1UA0
0,75 kW … 1,1 kW
6SE6400-3CC00-4AD3
…0BE21-5UA0
1,5 kW
6SE6400-3CC00-6AD3
…0BE22-2⃞A0, …0BE23-0⃞A0
2,2 kW … 3,0 kW
6SL3203-0CD21-0AA0
FSB
…0BE24-0⃞A0
4,0 kW
6SL3203-0CD21-4AA0
…0BE25-5⃞A0, …0BE27-5⃞A0
7,5 kW … 11,0 kW
6SL3203-0CD22-2AA0
…0BE31-1⃞A0
15,0 kW
6SL3203-0CD23-5AA0
…0BE31-5⃞A0, …0BE31-8⃞A0
18,5 kW … 22 kW
6SL3203-0CJ24-5AA0
…0BE32-2⃞A0
30 kW
6SL3203-0CD25-3AA0
FSE
…0BE33-0⃞A0, …0BE33-7⃞A0
37 kW … 45 kW
6SL3203-0CJ28-6AA0
FSF
…0BE34-5⃞A0, …0BE35-5⃞A0
55 kW … 75 kW
6SE6400-3CC11-2FD0
…0BE37-5⃞A0
90 kW
6SE6400-3CC11-7FD0
…0BE38-8UA0
110 kW
6SL3000-0CE32-3AA0
…0BE41-1UA0
132 kW
6SL3000-0CE32-8AA0
…0XE41-3UA0
160 kW
6SL3000-0CE33-3AA0
…0XE41-6UA0, …0XE42-0UA0
200 kW … 250 kW
6SL3000-0CE35-1AA0
FSC
FSD
FSGX
Convertitori con le Control Unit CU240B-2 e CU240E-2
28
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Descrizione
3.4 Componenti di sistema per i Power Module
Bobine di rete per PM240-2
N. di ordinazione6SL321⃞-…
Potenza
Bobina di rete
FSA
…1PE11-8⃞L0, …1PE12-3⃞L0,
…1PE13-2⃞L0, …1PE14-3⃞L0
0,55 kW … 1,5 kW
6SL3203-0CE13-2AA0
…1PE16-1⃞L0, …1PE18-0⃞L0
2,2 kW … 3,0 kW
6SL3203-0CE21-0AA0
Bobine di rete per PM340 1AC
3.4.3
N. di ordinazione 6SL3210-…
Potenza
Bobina di rete
FSA
…-1SB11-0⃞A0,
…1SB12-3⃞A0
0,12 kW … 0,37 kW
6SE6400-3CC00-4AB3
…-1SB14-0⃞A0
0,75 kW
6SE6400-3CC01-0AB3
Bobina di uscita
Bobine di uscita per il Power Module PM240 e il Power Module PM250
Le bobine di uscita riducono il
carico in tensione degli
avvolgimenti del motore. Inoltre
riducono il carico del convertitore
tramite correnti di carica
capacitive nei cavi.
Per i cavi motore a partire da 50
m (schermati) o da 100 m (non
schermati) è necessaria una
bobina di uscita.
Esempi:
Bobine di uscita sovrapponibili
Bobina di uscita per
per Power Module PM240 FSA e Power Module PM240
FSB
FSGX
Le bobine di uscita sono progettate per frequenze di impulsi di 4 kHz.
Tabella 3- 8
Bobine di uscita per Power Module PM240
PM240, numero di ordinazione 6SL3224-…
Potenza
Bobina di uscita
FSA
…0BE13-7UA0, …0BE15-5UA0,
…0BE17-5UA0, …0BE21-1UA0,
…0BE21-5UA0
0,37 kW … 1,5 kW
6SE6400-3TC00-4AD2
FSB
…0BE22-2⃞A0, …0BE23-0⃞A0,
…0BE24-0⃞A0
2,2 kW … 4,0 kW
6SL3202-0AE21-0CA0
FSC
…0BE25-5⃞A0, …0BE27-5⃞A0,
…0BE31-1⃞A0
7,5 kW … 15,0 kW
6SL3202-0AJ23-2CA0
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
29
Descrizione
3.4 Componenti di sistema per i Power Module
PM240, numero di ordinazione 6SL3224-…
Potenza
Bobina di uscita
FSD
…0BE31-5⃞A0
18,5 kW
6SE6400-3TC05-4DD0
…0BE31-8⃞A0
22 kW
6SE6400-3TC03-8DD0
…0BE32-2⃞A0
30 kW
6SE6400-3TC05-4DD0
…0BE33-0⃞A0
37 kW
6SE6400-3TC08-0ED0
…0BE33-7⃞A0
45 kW
6SE6400-3TC07-5ED0
…0BE34-5⃞A0
55 kW
6SE6400-3TC14-5FD0
…0BE35-5⃞A0
75 kW
6SE6400-3TC15-4FD0
…0BE37-5⃞A0
90 kW
6SE6400-3TC14-5FD0
…0BE38-8UA0
110 kW
6SL3000-2BE32-1AA0
…0BE41-1UA0
132 kW
6SL3000-2BE32-6AA0
FSE
FSF
FSGX
…0XE41-3UA0
160 kW
6SL3000-2BE33-2AA0
…0XE41-6UA0
200 kW
6SL3000-2BE33-8AA0
…0XE42-0UA0
250 kW
6SL3000-2BE35-0AA0
Tabella 3- 9
Bobine di uscita per Power Module PM250
PM250, numero di ordinazione 6SL3225-…
Potenza
Bobina di uscita
FSC
…0BE25-5⃞A0, …0BE27-5⃞A0,
…0BE31-1⃞A0
7,5 kW … 15,0 kW
6SL3202-0AJ23-2CA0
FSD
…0BE31-5⃞A0
18,5 kW
6SE6400-3TC05-4DD0
…0BE31-8⃞A0
22 kW
6SE6400-3TC03-8DD0
…0BE32-2⃞A0
30 kW
6SE6400-3TC05-4DD0
…0BE33-0⃞A0
37 kW
6SE6400-3TC08-0ED0
…0BE33-7⃞A0
45 kW
6SE6400-3TC07-5ED0
…0BE34-5⃞A0
55 kW
6SE6400-3TC14-5FD0
…0BE35-5⃞A0
75 kW
6SE6400-3TC15-4FD0
…0BE37-5⃞A0
90 kW
6SE6400-3TC14-5FD0
FSE
FSF
Convertitori con le Control Unit CU240B-2 e CU240E-2
30
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Descrizione
3.4 Componenti di sistema per i Power Module
3.4.4
Filtro sinusoidale
Il filtro sinusoidale all'uscita del convertitore
fornisce al motore tensioni di forma sinusoidale,
per cui è possibile utilizzare motori standard
senza cavi speciali. La lunghezza max.
ammessa del cavo di alimentazione del motore
sale a 300 m.
Esempio: Filtro sinusoidale per
convertitore con grandezza costruttiva
FSF
Nell'utilizzo di un filtro sinusoidale vale quanto segue:
● Il funzionamento è ammesso solo con frequenze di impulsi di 4 kHz ... 8 kHz.
A partire da una potenza di 110 kW del Power Module (secondo i dati della targhetta)
sono ammessi solo 4 kHz.
● La potenza del convertitore si riduce del 5%.
● La frequenza massima di uscita del convertitore è di 150 Hz a 380 V ... 480 V.
● Funzionamento e messa in servizio solo con motore collegato perché il filtro sinusoidale
non è stabile senza carico.
● Una bobina di uscita è superflua.
Tabella 3- 10 Filtro sinusoidale per Power Module PM240
PM240, numero di ordinazione 6SL3224-…
Potenza
Filtro sinusoidale
FSA
…0BE13-7UA0, …0BE15-5UA0,
…0BE17-5UA0
0,37 kW … 0,75 kW
6SL3202-0AE20-3SA0
…0BE21-1UA0, …0BE21-5UA0
1,1 kW … 1,5 kW
6SL3202-0AE20-6SA0
…0BE22-2⃞A0, …0BE23-0⃞A0
2,2 kW … 3,0 kW
6SL3202-0AE21-1SA0
…0BE24-0⃞A0
4,0 kW
6SL3202-0AE21-4SA0
…0BE25-5⃞A0
7,5 kW
6SL3202-0AE22-0SA0
…0BE27-5⃞A0, …0BE31-1⃞A0
11,0 kW … 15,0 kW
6SL3202-0AE23-3SA0
…0BE31-5⃞A0, …0BE31-8⃞A0
18,5 kW … 22 kW
6SL3202-0AE24-6SA0
…0BE32-2⃞A0
30 kW
6SL3202-0AE26-2SA0
FSE
…0BE33-0⃞A0, …0BE33-7⃞A0
37 kW … 45 kW
6SL3202-0AE28-8SA0
FSF
…0BE34-5⃞A0, …0BE35-5⃞A0
55 kW … 75 kW
6SL3202-0AE31-5SA0
…0BE37-5⃞A0
90 kW
6SL3202-0AE31-8SA0
…0BE38-8UA0, …0BE41-1UA0
110 kW … 132 kW
6SL3000-2CE32-3AA0
…0XE41-3UA0
160 kW
6SL3000-2CE32-8AA0
…0XE41-6UA0
200 kW
6SL3000-2CE33-3AA0
…0XE42-0UA0
250 kW
6SL3000-2CE34-1AA0
FSB
FSC
FSD
FSGX
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
31
Descrizione
3.4 Componenti di sistema per i Power Module
Tabella 3- 11 Filtro sinusoidale per Power Module PM250
PM250, numero di ordinazione 6SL3225-…
Potenza
Filtro sinusoidale
FSC
…0BE25-5⃞A0
7,5 kW
6SL3202-0AE22-0SA0
…0BE27-5⃞ A0, …0BE31-1⃞A0
11,0 kW … 15,0 kW
6SL3202-0AE23-3SA0
…0BE31-5⃞A0, …0BE31-8⃞A0
18,5 kW … 22 kW
6SL3202-0AE24-6SA0
FSD
…0BE32-2⃞A0
30 kW
6SL3202-0AE26-2SA0
FSE
…0BE33-0⃞A0, …0BE33-7⃞A0
37 kW … 45 kW
6SL3202-0AE28-8SA0
FSF
…0BE34-5⃞A0, …0BE35-5⃞A0
55 kW … 75 kW
6SL3202-0AE31-5SA0
…0BE37-5⃞A0
90 kW
6SL3202-0AE31-8SA0
Convertitori con le Control Unit CU240B-2 e CU240E-2
32
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Descrizione
3.4 Componenti di sistema per i Power Module
3.4.5
Resistenza di frenatura
La resistenza di frenatura consente di frenare rapidamente i carichi con un momento di
inerzia elevato.
Il Power Module comanda la resistenza di frenatura tramite il chopper di frenatura integrato.
Resistenze di frenatura per PM240
Per il Frame Size FSGX è disponibile un chopper di frenatura opzionale innestabile (numero
di ordinazione 6SL3300-1AE32-5AA0).
N. di ordinazione6SL3224-…
Potenza
Resistenza di frenatura
FSA
…0BE13-7UA0, …0BE15-5UA0
0,37 kW … 0,55 kW
6SE6400-4BD11-0AA0
…0BE17-5UA0, …0BE21-1UA0
0,75 kW … 1,1 kW
…0BE21-5UA0
1,5 kW
…0BE22-2⃞A0, …0BE23-0⃞A0
2,2 kW … 3,0 kW
…0BE24-0⃞A0
4,0 kW
…0BE25-5⃞A0, …0BE27-5⃞A0
7,5 kW … 11,0 kW
…0BE31-1⃞A0
15,0 kW
…0BE31-5⃞A0, …0BE31-8⃞A0
18,5 kW … 22 kW
…0BE32-2⃞A0
30 kW
FSE
…0BE33-0⃞A0, …0BE33-7⃞A0
37 kW … 45 kW
6SE6400-4BD22-2EA1
FSF
…0BE34-5⃞A0, …0BE35-5⃞A0
55 kW … 75 kW
6SE6400-4BD24-0FA0
…0BE37-5⃞A0
90 kW
…0BE38-8UA0
110 kW
…0BE41-1UA0
132 kW
…0XE41-3UA0
160 kW
6SL3000-1BE31-3AA0
…0XE41-6UA0, …0XE42-0UA0
200 kW … 250 kW
6SL3000-1BE32-5AA0
N. di ordinazione6SL321⃞-…
Potenza
Resistenza di frenatura
FSA
…1PE11-8⃞L0, …1PE12-3⃞L0,
…1PE13-2⃞L0, …1PE14-3⃞L0
0,55 kW … 1,5 kW
6SL3201-0BE14-3AA0
…1PE16-1⃞L0, …1PE18-0⃞L0
2,2 kW … 3,0 kW
6SL3201-0BE21-0AA0
N. di ordinazione 6SL3210-…
Potenza
Resistenza di frenatura
FSA
0,12 kW … 0,75 kW
6SE6400-4BC05-0AA0
FSB
FSC
FSD
FSGX
6SL3201-0BE12-0AA0
6SE6400-4BD16-5CA0
6SE6400-4BD21-2DA0
6SE6400-4BD26-0FA0
Resistenze di frenatura per PM240-2
Resistenze di frenatura per PM340, 1AC
…-1SB11-0⃞A0
…-1SB12-3⃞A0
…-1SB14-0⃞A0
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
33
Descrizione
3.4 Componenti di sistema per i Power Module
3.4.6
Brake Relay
Il Brake Relay offre un contatto in
chiusura (normalmente aperto,
NO) per comandare la bobina del
freno motore.
Numero di ordinazione:
6SL3252-0BB00-0AA0
Convertitori con le Control Unit CU240B-2 e CU240E-2
34
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Descrizione
3.5 Utensili per la messa in servizio del convertitore
3.5
Utensili per la messa in servizio del convertitore
Accessori per la messa in servizio e il salvataggio dei dati
Operator Panel per la messa in servizio, la diagnostica e il controllo del convertitore
BOP-2 (Basic Operator Panel) - da montare a scatto sul
convertitore
•
Copia di parametri dell'azionamento
•
Visualizzazione su due righe
•
Messa in servizio di base guidata
IOP (Intelligent Operator Panel) - da montare a scatto sul
convertitore
•
Copia di parametri dell'azionamento
•
Display con testo in chiaro
•
Guida attraverso menu e wizard dell'applicazione
Kit per il montaggio su porta per IOP/BOP-2
•
Per l'installazione del BOP-2 o del IOP in una porta
dell'armadio.
•
Tipo di protezione con IOP: IP54 o UL Type 12
•
Tipo di protezione con BOP-2: IP55
Per l'impiego mobile dell'IOP:
N. di ordinazione
6SL3255-0AA00-4CA1
6SL3255-0AA00-4JA0
6SL3256-0AP00-0JA0
6SL3255-0AA00-4HA0
IOP Handheld con custodia IOP, alimentatore, accumulatori e
cavo di collegamento RS232
Se si utilizza un cavo di collegamento proprio, rispettare la
lunghezza massima ammessa di 5 m.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
35
Descrizione
3.5 Utensili per la messa in servizio del convertitore
Tool per PCper messa in servizio, diagnostica e controllo del convertitore
PC Connection Kit
Contiene il DVD di STARTER e il cavo USB.
6SL3255-0AA00-2CA0
STARTER Tool di messa in servizio (software per PC)
Collegamento con il convertitore tramite cavo interfaccia USB,
PROFIBUS o PROFINET
STARTER su DVD:
6SL3072-0AA00-0AG0
Download: STARTER
(http://support.automation.siemens.com/WW/view/it/10804985/
133200)
Drive ES Basic
Come opzione per STEP 7 con funzione di routing per il
collegamento ad altre reti per PROFIBUS e PROFINET
6SW1700-5JA00-5AA0
Schede di memoria: per salvare e trasferire le impostazioni del convertitore
Scheda MMC
6SL3254-0AM00-0AA0
Scheda SD
6ES7954-8LB00-0AA0
Convertitori con le Control Unit CU240B-2 e CU240E-2
36
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.1
4
Panoramica dell'installazione del convertitore
Installazione del convertitore
Presupposto
Prima dell'installazione, eseguire i seguenti controlli:
● Si dispone dei componenti necessari del convertitore?
– Power Module
– Control Unit
– Accessori, ad es. bobina di rete o resistenza di frenatura
● Si dispone degli utensili e delle minuterie adatti per il montaggio del convertitore?
Procedura
Per installare il convertitore, procedere nel seguente modo:
1. Installare gli accessori (bobine di rete, filtro o
resistenza di frenatura) per il Power Module:
– Rispettare le istruzioni per l'installazione fornite
con gli accessori.
– Se si utilizza più di un componente per il
montaggio sovrapposto, l'installazione deve
avvenire secondo una sequenza precisa.
Vedere anche Installazione delle bobine, dei filtri
e delle resistenze di frenatura (Pagina 38).
2. Installare il Power Module.
Vedere anche Installazione del Power Module
(Pagina 40).
Per informazioni sul Power Module vedere anche il
Manuale di installazione corrispondente Manuale di
installazione
(http://support.automation.siemens.com/WW/view/it/
30563173/133300).
3. Installare la Control Unit.
Vedere anche Installazione della Control Unit
(Pagina 50).
Tutti i componenti del convertitore sono stati installati ed è possibile mettere in servizio il
convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
37
Installazione
4.2 Installazione delle bobine, dei filtri e delle resistenze di frenatura
4.2
Installazione delle bobine, dei filtri e delle resistenze di frenatura
Installazione delle bobine, dei filtri e delle resistenze di frenatura
L'installazione delle bobine, dei filtri e delle resistenze di frenatura è descritta nella rispettiva
documentazione fornita. Vedere anche la sezione: Ulteriori informazioni sul convertitore
(Pagina 397).
Installazione dei componenti per il montaggio sovrapposto
Per i Power Module PM240 e PM250, grandezze costruttive FSA, FSB e FSC sono
disponibili bobine, filtri e resistenze di frenatura come componenti per il montaggio
sovrapposto. I componenti per il montaggio sovrapposto possono essere installati anche
accanto al Power Module.
Figura 4-1
Combinazioni possibili di componenti per il montaggio sovrapposto
Convertitori con le Control Unit CU240B-2 e CU240E-2
38
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.2 Installazione delle bobine, dei filtri e delle resistenze di frenatura
Collegamenti elettrici della bobina di rete e del filtro di rete
● Collegamento di rete tramite morsetti
● Collegamento del convertitore tramite cavo preconfezionato
Collegamenti elettrici della bobina di uscita e del filtro sinusoidale
● Collegamento del convertitore tramite cavo preconfezionato
● Collegamento del motore tramite morsetti
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
39
Installazione
4.3 Installazione del Power Module
4.3
Installazione del Power Module
AVVERTENZA
Pericolo di propagazione del fuoco in caso di custodia insufficiente
Il fuoco e lo sviluppo di fumo possono provocare gravi danni a persone e cose.
• Installare le apparecchiature prive di custodia protettiva in un armadio metallico oppure
proteggere l'apparecchiatura con una contromisura equivalente, in modo da impedire il
contatto con il fuoco sia all'interno che all'esterno della custodia.
Montaggio dei Power Module con grado di protezione IP20
● Montare il Power Module verticalmente sulla piastra di montaggio in un armadio elettrico.
Per le grandezze costruttive FSA e FSB è disponibile un adattatore per il montaggio su
guide profilate DIN.
● Durante il montaggio rispettare le distanze minime da altri componenti nell'armadio
elettrico.
Le distanze minime sono necessarie per l'adeguato raffreddamento del convertitore.
● Non coprire le aperture per la ventilazione del convertitore.
Installazione di componenti aggiuntivi
A seconda dell'applicazione possono essere necessari i seguenti componenti aggiuntivi
(vedere anche la sezione Identificare il convertitore (Pagina 21)):
●
●
●
●
Bobine di rete
Filtri
Resistenze di frenatura
Brake Relay
Per informazioni sul montaggio di questi componenti vedere le istruzioni fornite con ciascun
componente.
Convertitori con le Control Unit CU240B-2 e CU240E-2
40
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.3 Installazione del Power Module
4.3.1
Dimensioni, maschere di foratura, distanze minime e coppie di serraggio
Nota
La profondità totale del convertitore aumenta, ad eccezione delle grandezze costruttive
FSGX (160 kW … 250 kW - con la Control Unit di 39 mm e di altri 12 mm o 27 mm se si
utilizza un BOP o uno IOP.
Dimensioni e dime di foratura per i Power Module PM230, PM240, PM250, PM260 - grado di
protezione IP20
Dime di foratura per PM230, PM240-2, FSA … FSC
Dime di foratura per PM230 FSD … FSF e per PM240, PM250 e PM260
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
41
Installazione
4.3 Installazione del Power Module
Tabella 4- 1 Dimensioni e distanze per PM230 e PM240-2 - grado di protezione IP20,
grandezze costruttive FSA … FSC
Grandezza costruttiva
Dimensioni (mm)
Altezza 1)
Distanze (mm)
Larghezza Profondità
a
b
c
in alto
in
basso
laterale
FSA
196
73
165
186
62,3
6
80
100
02)
FSB
292
100
165
281
80
6
80
100
02)
FSC
355
140
165
343
120
6
80
100
02)
Fissaggio:
FSA/FSB: viti M4, 2,5 Nm
FSC: viti M5, 2,5 Nm
1)
Con kit di collegamento della schermatura: FSA: + 80 mm; FSB: + 78 mm; FSC: + 77 mm
2)
Per ragioni di tolleranza si consiglia una distanza laterale di circa 1 mm.
Tabella 4- 2 Dimensioni e distanze per PM240 e PM250 - grado di protezione IP20,
grandezze costruttive FSA … FSC
Grandezza costruttiva
Dimensioni (mm)
Altezza 1)
Distanze (mm)
Larghezza Profondità
a
b
c
in alto
in basso
laterale
FSA
173
73
145
160
36,5
--
100
100
302)
FSB
270
153
165
258
133
--
100
100
402)
FSC
355
140
165
343
120
6
80
100
502)
Fissaggio:
FSA/FSB: viti M4, 2,5 Nm
FSC: viti M5, 2,5 Nm
1)
Con kit di collegamento della schermatura: FSA: +84 mm; FSB: +85 mm; FSC: +89 mm
2)
Con temperature ambiente in funzionamento fino a 40 °C senza distanza laterale. Per ragioni di tolleranza si consiglia
una distanza laterale di ca. 1 mm.
Tabella 4- 3 Dimensioni e distanze per PM230, PM240, PM250 e PM260 - grado di protezione IP20,
grandezze costruttive FSD … FSGX
Grandezza costruttiva
Dimensioni (mm)
Altezza 1)
Distanze (mm)
Larghezza Profondità
a
b
c
in alto
in basso
laterale
FSD senza filtro
419
275
204
325
235
11
300
300
02)
FSD con filtro
512
275
204
419
235
11
300
300
02)
FSE senza filtro
499
275
204
405
235
11
300
300
02)
FSE con filtro
635
275
204
541
235
11
300
300
02)
FSF senza filtro
634
350
316
598
300
11
350
350
02)
FSF con filtro
934
350
316
899
300
11
350
350
02)
1533
326
547
1506
125
14,5
250
150
50
FSGX
Fissaggio:
FSD/FSE: viti M6, 6 Nm
FSF/FSGX: viti M8, 13 Nm
1)
Con kit di collegamento della schermatura: FSD, FSE, FSF: +123 mm
2)
Per ragioni di tolleranza si consiglia una distanza laterale di circa 1 mm.
Convertitori con le Control Unit CU240B-2 e CU240E-2
42
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.3 Installazione del Power Module
4.3.2
Disegni quotati PT
Dimensioni e dime di foratura per Power Module PM230, PM240 in tecnica passante (Push-Through)
Tabella 4- 4 Dimensioni e distanze per PM230 e PM240-2 in tecnica passante,
grandezze costruttive FSA … FSC
Grandezza
costruttiva
Dimensioni (mm)
Altezza
1)
Distanze (mm)
Larghez Profon
za
dità
T1
T2
a
b
c
d
e
in alto in
latera
basso le
FSA
238
125,9
171
117,7
53,1
103
106
88
198
27
80
100
02)
FSB
345
153,9
171
117,7
53,1
147,
5
134
116
304
34,5
80
100
02)
FSC
410,5
200
171
117,7
53,1
123
174
156
365
30,5
80
100
02)
Fissaggio:
FSA/FSB/FSC: viti M5, 3 Nm
1)
Con kit di collegamento della schermatura: FSA: +84 mm; FSB: +85 mm; FSC: +89 mm
2)
I Power Module possono essere montati uno accanto all'altro. Per ragioni di tolleranza si consiglia una distanza laterale
di ca. 1 mm.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
43
Installazione
4.3 Installazione del Power Module
4.3.3
Figura 4-2
Collegamento della rete, del motore e dei componenti del convertitore
Collegamento del Power Module PM230 IP20 e in tecnica passante
Il filtro di rete del Power Module PM230 soddisfa i requisiti della classe A. Per requisiti EMC
più elevati, è richiesto un filtro di rete esterno di classe B.
Figura 4-3
Collegamento del Power Module PM240, PM240-2 IP20 e in tecnica passante
I Power Module PM240 e PM240-2 esistono con e senza filtro di rete integrato di classe A.
Per requisiti EMC più elevati è necessario un filtro di rete di classe B.
Convertitori con le Control Unit CU240B-2 e CU240E-2
44
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.3 Installazione del Power Module
Figura 4-4
Collegamento del Power Module PM250
I Power Module PM250 esistono con e senza filtro di rete integrato di classe A. Per requisiti
EMC più elevati è necessario un filtro di rete di classe B.
Figura 4-5
Collegamento del Power Module PM260
I Power Module PM260 esistono con e senza filtro di rete integrato di classe A. Per requisiti
EMC più elevati è necessario un filtro di rete di classe B.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
45
Installazione
4.3 Installazione del Power Module
Figura 4-6
Collegamento del Power Module PM340 1AC
I Power Module PM340 esistono con e senza filtro di rete integrato di classe A. Per requisiti
EMC più elevati è necessario un filtro di rete di classe B.
Il convertitore è concepito per i seguenti sistemi di distribuzione della corrente secondo
EN 60950.
Tabella 4- 5 Sistemi di distribuzione della corrente per il convertitore
Rete TN-S
Rete TN-C-S
Rete TN-C
Rete TT
Rete IT
In una rete di
alimentazione TN-S
sono presenti
conduttori separati che
fungono da conduttori
di neutro o conduttori
di protezione verso
terra.
In una rete TN-C-S le
funzioni del conduttore
di neutro e del
conduttore di
protezione verso terra
sono combinate.
In una rete TN-C le
funzioni del conduttore
di neutro e del
conduttore di
protezione verso terra
sono combinate in un
unico conduttore
nell'intero sistema.
In una rete TT un
punto è messo
direttamente a terra.
Le parti conduttive
accessibili
dell'impianto sono
collegate a terra in
modo da essere
elettricamente
indipendenti dalla terra
della rete.
Una rete IT non ha un
collegamento diretto a
terra. Le parti
accessibili
dell'impianto sono
invece messe a terra.
Convertitori con le Control Unit CU240B-2 e CU240E-2
46
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.3 Installazione del Power Module
AVVERTENZA
Pericolo di morte in caso di interruzione del conduttore di protezione esterno a causa di
correnti di dispersione elevate
Il convertitore fornisce una corrente di dispersione elevata > 3,5 mA attraverso il conduttore
di protezione. Il contatto con elementi conduttivi può provocare la morte o gravi lesioni in
caso di interruzione del conduttore di protezione.
• Collegare al convertitore un conduttore di protezione che soddisfi almeno una delle
condizioni seguenti:
– Il conduttore di protezione è protetto contro i danni meccanici.
–
–
–
–
I cavi posati all'interno di quadri elettrici o di corpi macchina chiusi sono
sufficientemente protetti.
Il conduttore di protezione posato come cavo singolo ha una sezione di
≥ 10 mm² Cu.
In un cavo multifilare il conduttore di protezione ha una sezione di ≥ 2,5 mm² Cu.
Sono installati due conduttori di protezione paralleli con sezione identica.
Il conduttore di protezione è conforme alle disposizioni locali in materia di
apparecchiature con correnti di dispersione elevate.
PERICOLO
Folgorazione in caso di contatto con i collegamenti del motore
Subito dopo il collegamento alla rete del convertitore, è possibile che i collegamenti del
motore presentino tensioni pericolose. Quando il motore è collegato al convertitore, il
contatto con i cavi del motore con la morsettiera aperta comporta il pericolo di morte.
• Chiudere la morsettiera del motore prima di collegare il convertitore alla rete.
ATTENZIONE
Danni del convertitore in caso di rete non adatta
L'impiego del convertitore con filtro di rete integrato o esterno su una rete non collegata a
terra provoca la distruzione del filtro di rete.
• Collegare il convertitore con filtro di rete integrato o esterno solo a reti con centro stella
messo a terra (rete TN).
AVVERTENZA
Pericolo di incendio del motore a causa di sovraccarico dell'isolamento
Un cortocircuito verso terra in una rete IT provoca un aumento del carico dell'isolamento
del motore. La conseguenza possibile è il guasto dell'isolamento con pericolo per le
persone dovuto allo sviluppo di fumo e incendio.
• Utilizzare un dispositivo di monitoraggio in grado di segnalare eventuali guasti
dell'isolamento.
• Eliminare il guasto il più rapidamente possibile per non sovraccaricare l'isolamento del
motore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
47
Installazione
4.3 Installazione del Power Module
ATTENZIONE
Danni del convertitore in caso di guasto nella rete IT
Un cortocircuito verso terra nel cavo motore durante il funzionamento può provocare la
disinserzione del convertitore per sovracorrente. Nei casi più sfavorevoli, la sovracorrente
può causare danni al convertitore.
• Utilizzare nella rete IT una bobina di uscita.
Collegamento del cavo di rete al convertitore
Procedura
Per collegare il convertitore alla rete, procedere nel seguente modo:
1. Aprire le eventuali calotte coprimorsetti del convertitore
2. Collegare la rete ai morsetti U1/L1, V1/L2 e W1/L3.
3. Collegare il conduttore di protezione della rete al morsetto PE del convertitore.
4. Chiudere le eventuali calotte coprimorsetti del convertitore.
Il cavo di rete è stato collegato al convertitore.
Collegamento del cavo motore al convertitore
Procedura
Per collegare il cavo motore al convertitore, procedere nel seguente modo:
1. Aprire le eventuali calotte coprimorsetti del convertitore
2. Collegare il motore ai morsetti U2, V2 e W2.
Rispettare le prescrizioni relative al cablaggio in conformità EMC:
Collegamento del convertitore secondo le norme EMC (Pagina 63)
3. Collegare il conduttore di protezione del motore al morsetto
del convertitore.
4. Chiudere le eventuali calotte coprimorsetti del convertitore.
Il cavo motore è stato collegato al convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
48
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.3 Installazione del Power Module
Collegamento del cavo motore al motore
Collegare il motore eseguendo un collegamento a stella o a triangolo in base
all'applicazione. Per maggiori informazioni al riguardo vedere la sezione Circuito a stella o a
triangolo del motore ed esempi pratici (Pagina 361).
Lunghezze dei cavi ammesse
I cavi ammessi e le lunghezze consentite sono indicati nel Manuale di installazione del
Power Module o nel catalogo D31.
Nota
• Rispettare le indicazioni riportate sulla targhetta dei dati tecnici del motore e nei rispettivi
schemi elettrici.
• Utilizzare cavi di comando schermati.
• Rispettare le avvertenze EMC fornite dal costruttore del convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
49
Installazione
4.4 Installazione della Control Unit
4.4
Installazione della Control Unit
Installare la Control Unit su un nuovo Power Module IP20
Procedura
Per collegare il Power Module e la Control Unit, procedere nel seguente modo:
1. Inserire la parte posteriore della Control
Unit nelle scanalature del Power
Module previste a questo scopo.
2. Premere la Control Unit sul Power
Module finché il meccanismo di sblocco
scatta in posizione.
Il Power Module e la Control Unit a questo punto sono collegati tra loro.
Per rimuovere la Control Unit, premere sul pulsante di sblocco ③ e separare la Control Unit
dal Power Module.
Convertitori con le Control Unit CU240B-2 e CU240E-2
50
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.4 Installazione della Control Unit
4.4.1
Interfacce, connettori, interruttori, morsettiere e LED della CU
Figura 4-7
Design della Control Unit sull'esempio della CU240E-2
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
51
Installazione
4.4 Installazione della Control Unit
4.4.2
①
②
③
④
⑤
⑥
Morsettiere delle Control Unit CU240B-2
L'ingresso analogico è alimentato dalla tensione 10 V interna.
L'ingresso analogico è alimentato da una tensione 10 V esterna.
Cablaggio in caso di utilizzo delle alimentazioni di tensione interne. Collegamento di un contatto con chiusura su P.
Cablaggio in caso di utilizzo delle alimentazioni di tensione esterne. Collegamento di un contatto con chiusura su P.
Cablaggio in caso di utilizzo delle alimentazioni di tensione interne. Collegamento di un contatto con chiusura su M.
Cablaggio in caso di utilizzo delle alimentazioni di tensione esterne. Collegamento di un contatto con chiusura su M.
CAUTELA
Se per l'applicazione utilizzata è richiesta una certificazione UL, fare riferimento alle
informazioni relative all'uscita digitale nella sezione Dati tecnici, Control Unit CU240B-2
(Pagina 331).
Il significato degli ingressi e delle uscite è illustrato nella messa in servizio di base. Per
maggiori informazioni vedere la sezione Selezione delle impostazioni adeguate delle
interfacce (Pagina 55).
Convertitori con le Control Unit CU240B-2 e CU240E-2
52
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.4 Installazione della Control Unit
4.4.3
Morsettiere delle Control Unit CU240E-2
①
Gli ingressi analogici sono alimentati da una sorgente di tensione esterna a 10 V.
②
③
④
⑤
⑥
Gli ingressi analogici sono alimentati dalla tensione interna a 10 V.
Cablaggio in caso di utilizzo delle alimentazioni di tensione interne. Collegamento di un contatto con chiusura su P.
Cablaggio in caso di utilizzo delle alimentazioni di tensione esterne. Collegamento di un contatto con chiusura su P.
Cablaggio in caso di utilizzo delle alimentazioni di tensione interne. Collegamento di un contatto con chiusura su M.
Cablaggio in caso di utilizzo delle alimentazioni di tensione esterne. Collegamento di un contatto con chiusura su M.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
53
Installazione
4.4 Installazione della Control Unit
ATTENZIONE
Danneggiamento della Control Unit CU240E-2 PN e CU240E-2 PN-F in caso di
cortocircuito dell'uscita 24 V
Qualora si verificassero contemporaneamente le condizioni seguenti, la Control Unit
potrebbe guastarsi:
1. Durante il funzionamento del convertitore si verifica un cortocircuito all'uscita 24 V sul
morsetto 9.
2. La temperatura ambiente ha raggiunto il limite superiore ammesso.
3. Ai morsetti 31 e 32 è stata applicata l'alimentazione esterna a 24 V e la tensione sul
morsetto 31 è al limite superiore ammesso.
Per non danneggiare la Control Unit si deve escludere la possibilità che tutte e tre le
condizioni siano soddisfatte contemporaneamente.
Nota
Se per l'applicazione utilizzata è richiesta una certificazione UL, fare riferimento alle
informazioni relative all'uscita digitale nella sezione Dati tecnici, Control Unit CU240E-2
(Pagina 333).
Il significato degli ingressi e delle uscite è illustrato nella messa in servizio di base. Per
maggiori informazioni vedere la sezione: Selezione delle impostazioni adeguate delle
interfacce (Pagina 55).
Per un ingresso fail-safe servono due ingressi digitali "standard" liberi.
Morsetti
Designazione
Ingresso fail-safe
16
DI4
F-DI0
17
DI5
Il modo in cui si utilizzano più ingressi fail-safe del convertitore viene descritto nel manuale di
guida alle funzioni Safety Integrated. Vedere anche la sezione: Ulteriori informazioni sul
convertitore (Pagina 397).
Per maggiori informazioni sull'ingresso fail-safe vedere il capitolo Ingresso fail-safe
(Pagina 92).
Convertitori con le Control Unit CU240B-2 e CU240E-2
54
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.4 Installazione della Control Unit
4.4.4
Selezione delle impostazioni adeguate delle interfacce
Nell'impostazione di fabbrica, gli ingressi e le uscite del convertitore e l'interfaccia del bus di
campo hanno funzioni predefinite.
Quando si mette in servizio il convertitore, è possibile modificare la funzione di ogni ingresso
e di ogni uscita del convertitore e l'impostazione dell'interfaccia del bus di campo.
Per facilitare l'impostazione, il convertitore offre varie impostazioni predefinite (macro).
Nelle pagine seguenti sono rappresentati solo ingressi e uscite la cui funzione cambia con la
scelta di una determinata impostazione.
Procedura
Per scegliere un'impostazione predefinita del convertitore, procedere nel modo seguente:
1. Determinare quali funzioni degli ingressi e delle uscite sono necessarie per l'applicazione.
2. Individuare la configurazione I/O (macro) più adatta per l'applicazione.
3. Annotare il numero della macro dell'impostazione predefinita adatta.
Il numero della macro va impostato durante la messa in servizio del convertitore.
È stata definita la preimpostazione adatta per il convertitore.
4.4.4.1
Preimpostazioni e cablaggio dei convertitori con le Control Unit CU240B-2
Il convertitore con le Control Unit CU240B-2 e CU240B-2 DP dispone delle seguenti
preimpostazioni per le sue interfacce:
Macro 7: Commutazione tramite DI 3 tra bus di campo e JOG
Macro 9: Potenziometro motore (MOP)
Impostazione di fabbrica per convertitori con interfaccia PROFIBUS
Telegramma PROFIdrive 1
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
55
Installazione
4.4 Installazione della Control Unit
Macro 12: Controllo a due fili con
metodo 1
Macro 17: Controllo a due fili con
metodo 2
Impostazione di fabbrica per
convertitori con interfaccia USS
Macro 18: Controllo a due fili con
metodo 3
Macro 20: Controllo a tre fili con
metodo 2
Macro 21: Bus di campo USS
Macro 19: Controllo a tre fili con
metodo 1
Impostazione USS: 38400Baud,
2 PZD, PKW variabile
Convertitori con le Control Unit CU240B-2 e CU240E-2
56
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.4 Installazione della Control Unit
4.4.4.2
Preimpostazioni e cablaggio dei convertitori con le Control Unit CU240E-2
Il convertitore con le Control Unit CU240E-2, CU240E-2 F, CU240E-2 DP e CU240E-2 DP F
dispone delle seguenti preimpostazioni per le sue interfacce:
Macro 1: Due numeri di giri fissi
Macro 2: Due numeri di giri fissi con
funzione di sicurezza
DI 4 e DI 5 = high: il convertitore
somma i due numeri di giri fissi.
Macro 4: PROFIBUS o PROFINET
Telegramma PROFIdrive 352
Macro 3: Quattro numeri di giri fissi
Più DI = high: il convertitore somma i
numeri di giri fissi corrispondenti.
Macro 5: PROFIBUS o PROFINET con Macro 6: PROFIBUS o PROFINET con
funzione di sicurezza
due funzioni di sicurezza
Telegramma PROFIdrive 1
Telegramma PROFIdrive 1
Solo con le Control Unit CU240E-2 F,
CU240E-2 DP-F e CU240E-2 PN-F.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
57
Installazione
4.4 Installazione della Control Unit
Macro 7: Commutazione tramite DI 3 tra bus di campo e JOG
Impostazione di fabbrica per convertitori con interfaccia PROFIBUS o
PROFINET
Macro 8: Potenziometro motore (MOP)
con funzione di sicurezza
Telegramma PROFIdrive 1
Macro 9: Potenziometro motore (MOP)
Macro 12: Controllo a due fili con
metodo 1
Impostazione di fabbrica per
convertitori senza interfaccia
PROFIBUS o PROFINET.
Macro 13: Valore di riferimento tramite
ingresso analogico con funzione di
sicurezza
Convertitori con le Control Unit CU240B-2 e CU240E-2
58
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.4 Installazione della Control Unit
Macro 14: Commutazione tramite DI 3 tra bus di campo e potenziometro motore
(MOP)
Telegramma PROFIdrive 1
Macro 15: Commutazione tramite DI 3 tra valore di riferimento analogico e
potenziometro motore (MOP)
Macro 17: Controllo a due fili con
metodo 2
Macro 18: Controllo a due fili con
metodo 3
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
59
Installazione
4.4 Installazione della Control Unit
Macro 19: Controllo a tre fili con
metodo 1
Macro 20: Controllo a tre fili con
metodo 2
Macro 21: Bus di campo USS
Impostazione USS: 38400 Baud, 2
PZD, PKW variabile
Convertitori con le Control Unit CU240B-2 e CU240E-2
60
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.4 Installazione della Control Unit
4.4.5
Cablaggio della morsettiera
AVVERTENZA
Pericolo di morte a causa di tensione pericolosa in caso di collegamento di alimentatori di
corrente non adatti
Il contatto con parti sotto tensione può provocare la morte o gravi lesioni.
• Per tutti i connettori e i morsetti dei gruppi elettronici utilizzare solo alimentatori che
forniscono tensioni di uscita PELV (Protective Extra Low Voltage) o SELV (Safety Extra
Low Voltage).
ATTENZIONE
Danneggiamento del convertitore in caso di cavi di segnale molto lunghi
Eventuali cavi lunghi sugli ingressi digitali e sull'alimentazione di corrente 24 V del
convertitore possono provocare sovratensioni nelle operazioni di commutazione. Le
sovratensioni possono danneggiare il convertitore.
• Se i cavi sono > 30 m, collegare un elemento di protezione contro le sovratensioni sugli
ingressi digitali e sull'alimentazione di corrente 24 V tra il morsetto e il relativo potenziale
di riferimento.
Si consiglia di utilizzare il morsetto di protezione dalle sovratensioni della marca
Weidmüller, tipo MCZ OVP TAZ DIODE 24VDC.
Presupposti
● Utilizzare cavi adeguati:
– Cavi rigidi o flessibili.
– Sezioni cavi adatta: 0,5 mm² (21 AWG) ... 1,5 mm² (16 AWG).
Per il cablaggio completo si consiglia di usare cavi con sezione 1 mm² (18 AWG).
● Non utilizzare puntalini.
● Una volta trovata una preimpostazione adeguata delle morsettiere, cablare il convertitore.
Vedere anche la sezione: Selezione delle impostazioni adeguate delle interfacce
(Pagina 55).
● Utilizzare l'utensile adatto:
– Piccolo cacciavite per l'apertura dei morsetti a molla
– Utensile per l'isolamento dei conduttori
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
61
Installazione
4.4 Installazione della Control Unit
Procedura
Per cablare la morsettiera del convertitore, procedere nel modo seguente:
1. Rimuovere all'incirca gli ultimi 10 mm dell'isolamento del conduttore.
2. Con il cacciavite premere sull'elemento di comando del morsetto a molla finché il
morsetto non si apre.
3. Inserire il conduttore nel morsetto fino all'arresto e rimuovere il cacciavite.
4. Verificare la sicurezza del contatto del conduttore tirando leggermente il conduttore
stesso.
5. Cablare nello stesso modo tutti i morsetti necessari della morsettiera.
6. Posare i cavi di segnale in modo da poter richiudere completamente gli sportelli frontali
dopo aver cablato la morsettiera.
7. Se si devono impiegare cavi schermati, la schermatura va collegata ad ampia superficie e
con buona conduttività alla piastra di montaggio del quadro elettrico o al supporto di
schermatura del convertitore.
Vedere anche: Direttive di montaggio EMC
(http://support.automation.siemens.com/WW/view/en/60612658)
8. Utilizzare uno scarico del tiro.
Le morsettiere del convertitore sono state cablate.
4.4.6
Assegnazione delle interfacce del bus di campo
L'interfaccia del bus di campo del convertitore si trova sul lato inferiore della Control Unit.
Figura 4-8
Assegnazione delle interfacce del bus di campo
Convertitori con le Control Unit CU240B-2 e CU240E-2
62
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.5 Collegamento del convertitore secondo le norme EMC
4.5
Collegamento del convertitore secondo le norme EMC
4.5.1
Collegamento dei convertitori in conformità EMC
Perché l'azionamento funzioni senza anomalie, è necessaria un'installazione conforme EMC
del convertitore e del motore.
Installare e utilizzare il convertitore con il grado di protezione IP20 in un armadio elettrico
chiuso.
I convertitori con il grado di protezione IP55 possono essere installati all'esterno di un
armadio elettrico.
Una panoramica della struttura dell'armadio elettrico e del cablaggio è riportata nella sezione
seguente. Per maggiori informazioni vedere le istruzioni di montaggio del Power Module.
Nelle sezioni seguenti è descritto anche il collegamento del convertitore in conformità EMC.
4.5.2
Eliminazione di interferenze elettromagnetiche (EMI)
I convertitori sono progettati per l'impiego in ambienti industriali in cui è prevedibile un alto
livello di interferenze elettromagnetiche. Solo un'installazione corretta delle apparecchiature
garantisce un funzionamento sicuro, affidabile e privo di anomalie.
Struttura dell'armadio elettrico
● Tutti i componenti e le parti metalliche dell'armadio elettrico devono essere collegati con
buona conduttività al telaio dell'armadio stesso:
– Pannelli laterali
– Pannelli posteriori
– Lamiera del coperchio
– Lamiere di fondo
Assicurarsi che la superficie di contatto sia la più ampia possibile o vi siano più
collegamenti a vite singoli.
● La sbarra PE e la sbarra di schermatura EMC devono essere collegate anche con il telaio
dell'armadio elettrico assicurando una buona conduttività elettrica, che può essere
ottenuta con la superficie più ampia possibile.
● Tutti gli involucri metallici delle apparecchiature installate nell'armadio elettrico, ad es. il
convertitore o il filtro di rete, devono essere collegati con il telaio dell'armadio elettrico
utilizzando un buon collegamento elettrico e la superficie più ampia possibile.
Si consiglia di installare tali apparecchiature su una piastra metallica non verniciata e
provvista di una buona conduttività.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
63
Installazione
4.5 Collegamento del convertitore secondo le norme EMC
● Per i collegamenti a vite su superfici metalliche verniciate o anodizzate occorre adottare
uno dei seguenti provvedimenti al fine di garantire la conduttività:
– Utilizzare speciali rondelle di contatto (dentate) che tagliano la superficie verniciata o
anodizzata.
– Rimuovere lo strato isolante sui punti di contatto.
● Dotare i seguenti componenti di dispositivi antidisturbo:
– bobine di contattori
– relè
– elettrovalvole
– freni di stazionamento motore
I dispositivi antidisturbo sono componenti RC o varistori con bobine AC e diodi di ricircolo
o varistori per bobine DC.
Collegare il dispositivo antidisturbo direttamente alla bobina.
Posa e schermatura dei cavi
● Tutti i cavi di potenza del convertitore (cavi di rete, cavi di collegamento tra chopper di
frenatura e relativa resistenza di frenatura, cavi motore) vanno posati distanziati dai cavi
di segnale e dai cavi dati. Rispettare una distanza minima di circa 25 cm. Se non è
possibile posare i cavi distanziati, utilizzare piastre di separazione metalliche
adeguatamente collegate alla piastra di montaggio.
● I cavi dalla rete al filtro di rete vanno posati distanziati dai seguenti cavi:
– Cavi tra il filtro di rete e il convertitore
– Cavi di collegamento tra il chopper di frenatura e la rispettiva resistenza di frenatura
– Cavi motore
● I cavi di segnale, i cavi dati e i cavi di rete dotati di filtro devono incrociare i cavi di
potenza senza filtro solo perpendicolarmente.
● Mantenere tutti i cavi quanto più corti possibile.
● I cavi di segnale, i cavi dati e i rispettivi cavi di compensazione del potenziale devono
sempre essere posati in parallelo e il più possibile ravvicinati.
● Utilizzare cavi motore schermati.
● Il cavo motore schermato va posato separatamente dai cavi dei sensori di temperatura
del motore (PTC/KTY)
● I cavi di segnale e i cavi dati devono essere schermati.
● Le schermature devono essere collegate con gli involucri messi a terra su entrambe le
estremità, garantendo una buona conduttività elettrica e un'ampia superficie.
● Le schermature dei cavi devono essere collegate il più vicino possibile al punto in cui il
cavo entra nell'armadio elettrico.
● Per i cavi di potenza utilizzare le sbarre di schermatura EMC.
Per i cavi di segnale e i cavi dati, utilizzare gli elementi del supporto per la schermatura nel
convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
64
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Installazione
4.5 Collegamento del convertitore secondo le norme EMC
● Le schermature dei cavi non devono essere interrotte da morsettiere intermedie.
● Per le schermature dei cavi utilizzare i rispettivi morsetti EMV.
I morsetti EMV collegano la schermatura dei cavi con le sbarre di schermatura EMC o
con l'elemento di supporto per la schermatura con un'ampia superficie conduttiva.
Cablaggio conforme EMC per Power Module con grado di protezione IP20
Nella figura la calotta coprimorsetti non è rappresentata per mettere in evidenza il collegamento del
cavo.
①
②
③
④
⑤
⑥
⑦
⑧
⑨
Cavo di collegamento alla rete (non schermato) per Power Module con filtro di rete integrato.
Se si utilizza un filtro di rete esterno, è necessario un cavo schermato tra filtro di rete e Power
Module.
Scarico del tiro
Collegamento di rete
Piastra di montaggio in metallo (non verniciata e con buona conduttività)
Collegamento del motore
Schermatura del cavo
Fascette per un collegamento elettrico con superficie ampia tra schermatura e piastra di
montaggio
Cavo di collegamento al motore (schermato)
Piastra di schermatura (opzione). Per un'installazione conforme EMC del Power Module PM2402 e PM230 (FSA … FSC) utilizzare la piastra di schermatura e applicare la schermatura del cavo
di comando sia sul lamierino per schermatura della CU che su quello del Power Module.
Figura 4-9
Cablaggio secondo le norme EMC sull'esempio di un Power Module Frame Size E
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
65
Installazione
4.5 Collegamento del convertitore secondo le norme EMC
Figura 4-10
Supporto per la schermatura - Dettaglio
Schermatura con apposito lamierino:
Sono disponibili kit di collegamento della
schermatura per tutte le grandezze costruttive del
Power Module (per ulteriori informazioni vedere il
catalogo D11.1). Le schermature dei cavi devono
essere collegate al lamierino per schermatura
mediante le apposite fascette su un'ampia superficie
di contatto.
Schermatura senza apposito lamierino: È possibile effettuare la schermatura conforme EMC
anche senza lamierino per schermatura. In questo
caso occorre fare in modo che le schermature dei
cavi siano collegate su un'ampia superficie di
contatto al potenziale di terra.
Collegamento della resistenza di
frenatura:
• Collegare la resistenza di schermatura con un
cavo schermato.
• Applicare la schermatura sulla piastra di
montaggio o sulla piastra di schermatura.
• A questo scopo utilizzare una fascetta per
realizzare un collegamento elettrico con buona
conduttività su un'ampia superficie conduttiva.
Convertitori con le Control Unit CU240B-2 e CU240E-2
66
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.1
5
Linee guida per la messa in servizio
Procedura
Per mettere in servizio il convertitore, procedere nel modo seguente:
1. Definire i requisiti della
propria applicazione per
l'azionamento.
→ (Pagina 68).
2. Se necessario,
reimpostare il
convertitore ai valori di
fabbrica.
→ (Pagina 75).
3. Controllare se
l'impostazione di fabbrica
del convertitore è
adeguata per
l'applicazione.
4.
5.
6.
7.
Se non lo è, avviare la
messa in servizio di
base.
→ (Pagina 76).
Verificare se occorre
adattare le funzioni della
morsettiera definite
durante la messa in
servizio.
→ (Pagina 89).
Se necessario, adattare
l'interfaccia di
comunicazione nel
convertitore.
→ (Pagina 103).
Se necessario, impostare
ulteriori funzioni nel
convertitore.
→ (Pagina 169).
Salvare le impostazioni.
→ (Pagina 273).
Il convertitore è stato messo in servizio.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
67
Messa in servizio
5.2 Preparazione della messa in servizio
5.2
Preparazione della messa in servizio
Panoramica
Prima di iniziare la messa in servizio, è necessario rispondere alla domande seguenti:
● Quali sono i dati del convertitore utilizzato?
→ Identificare il convertitore (Pagina 21).
● Quali sono i dati del motore collegato?
→ Preparazione della messa in servizio (Pagina 68).
● Quali interfacce del convertitore sono attive?
→ Esempi di cablaggio per le impostazioni di fabbrica (Pagina 69).
● Tramite quali interfacce del convertitore il controllore sovraordinato comanda
l'azionamento?
● Com'è impostato il convertitore?
→ Preimpostazione del controllo da convertitore (Pagina 72).
● Quali requisiti tecnologici deve soddisfare l'azionamento?
→ Controllo U/f o regolazione vettoriale (numero di giri/coppia)? (Pagina 73).
→ Definizione di altri requisiti dell'applicazione (Pagina 74).
Quale motore è collegato al convertitore?
Se si utilizza il tool di messa in servizio STARTER e un motore SIEMENS, occorre soltanto il
numero di ordinazione del motore. Altrimenti è necessario annotare i dati riportati sulla
targhetta identificativa del motore.
In quale area geografica viene utilizzato il motore?
● Europa IEC: 50 Hz [kW]
● Nordamerica NEMA: 60 Hz [hp] o 60 Hz [kW]
Come viene collegato il motore?
Verificare il tipo di collegamento del motore (collegamento a stella [Y] o a triangolo [Δ]).
Annotare i dati motore adeguati al tipo di collegamento.
Qual è la temperatura ambiente del motore?
Per la messa in servizio è necessaria la temperatura ambiente del motore, se si discosta da
20° C.
Convertitori con le Control Unit CU240B-2 e CU240E-2
68
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.2 Preparazione della messa in servizio
Figura 5-1
5.2.1
Dati motore della targhetta identificativa
Esempi di cablaggio per le impostazioni di fabbrica
Per utilizzare l'impostazione di fabbrica del convertitore, è necessario cablare la morsettiera
del convertitore come descritto negli esempi che seguono.
Cablaggio della morsettiera sulle Control Unit CU240B-2
Cablaggio sulle Control Unit senza interfaccia PROFIBUS o
PROFINET
Cablaggio sulle Control Unit con interfaccia PROFIBUS o
PROFINET
DI 3 = LOW: Telegramma PROFIdrive 1
DI 3 = HIGH: JOG
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
69
Messa in servizio
5.2 Preparazione della messa in servizio
Cablaggio della morsettiera sulle Control Unit CU240E-2
Cablaggio sulle Control Unit senza interfaccia PROFIBUS o
PROFINET
Cablaggio sulle Control Unit con interfaccia PROFIBUS o
PROFINET
DI 3 = LOW: Telegramma PROFIdrive 1
DI 3 = HIGH: JOG
Convertitori con le Control Unit CU240B-2 e CU240E-2
70
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.2 Preparazione della messa in servizio
5.2.2
Il motore è adatto al convertitore?
Il convertitore è preimpostato in fabbrica su un motore come quello illustrato nella figura
seguente.
Figura 5-2
Dati motore nell'impostazione di fabbrica
La corrente nominale del motore deve essere compresa nell'intervallo 13% … 100% della
corrente nominale del convertitore.
Esempio: con un convertitore con corrente nominale di 10,2 A è necessario utilizzare motori
asincroni con correnti nominali nell'intervallo 1,3 A … 10,2 A.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
71
Messa in servizio
5.2 Preparazione della messa in servizio
5.2.3
Preimpostazione del controllo da convertitore
Inserzione/disinserzione del motore
I convertitori sono impostati in fabbrica in modo che il motore dopo l'inserzione acceleri in
10 secondi (a 1500 1/min) fino a raggiungere il valore di riferimento del numero di giri. Dopo
la disinserzione, il motore frena in ogni caso con un tempo di decelerazione di 10 secondi.
Figura 5-3
Inserzione, disinserzione e inversione del senso di rotazione del motore
nell'impostazione di fabbrica
Inserzione/disinserzione del motore nel funzionamento a impulsi
Nei convertitori con interfaccia PROFIBUS il comando può essere commutato tramite
l'ingresso digitale DI 3. Il motore viene inserito/disinserito tramite PROFIBUS o azionato
tramite gli ingressi digitali nel funzionamento a impulsi.
Con un comando di controllo sul relativo ingresso digitale, il motore gira a una velocità di
±150 1/min. Il tempo di accelerazione e decelerazione è comunque di 10 secondi a una
velocità di 1500 1/min.
Figura 5-4
Jog del motore nell'impostazione di fabbrica
Convertitori con le Control Unit CU240B-2 e CU240E-2
72
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.2 Preparazione della messa in servizio
5.2.4
Controllo U/f o regolazione vettoriale (numero di giri/coppia)?
Per i motori asincroni esistono due metodi di controllo e regolazione:
● Controllo U/f (calcolo della tensione del motore sulla base di una caratteristica)
● Regolazione di velocità (anche: regolazione orientata al campo o regolazione vettoriale)
Criteri di scelta del controllo U/f o della regolazione vettoriale
Con il controllo U/f si può modificare il numero di giri di motori asincroni in molte applicazioni.
Per le seguenti applicazioni viene in genere impiegato il controllo U/f:
● Pompe
● Ventilatore
● Compressori
● Nastro trasportatore orizzontale
La regolazione vettoriale presenta i seguenti vantaggi rispetto al controllo U/f:
● Numero di giri più stabile in caso di variazioni del carico motore.
● Tempi di accelerazione più brevi in caso di variazioni del valore di riferimento.
● Accelerazione e frenatura possibili con coppia max. impostabile.
● Migliore protezione del motore e della macchina azionata grazie alla limitazione della
coppia impostabile.
● Coppia massima possibile nello stato di fermo.
La regolazione di velocità viene utilizzata tipicamente con le seguenti applicazioni:
● Dispositivi di sollevamento e trasportatori verticali
● Avvolgitore
● Estrusore
La regolazione vettoriale non deve essere utilizzata nel casi seguenti:
● Quando il motore è piccolo rispetto al convertitore (la potenza nominale del motore non
deve essere inferiore a un quarto della potenza nominale del convertitore)
● Quando più motori funzionano con un solo convertitore
● Quando tra convertitore e motore viene utilizzato un contattore di potenza che viene
aperto mentre il motore è inserito
● Quando il numero di giri massimo del motore supera i seguenti valori:
Frequenza di impulsi del convertitore
2 kHz
4 kHz e oltre
Numero di poli del motore
2 poli
4 poli
6 poli
2 poli
4 poli
6 poli
Numero di giri massimo del motore
[1/min]
9960
4980
3320
14400
7200
4800
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
73
Messa in servizio
5.2 Preparazione della messa in servizio
5.2.5
Definizione di altri requisiti dell'applicazione
Quali limiti si devono impostare per il numero di giri? (Numero di giri minimo e massimo)
● Numero di giri minimo - impostazione di fabbrica 0 [1/min]
Il numero di giri minimo è numero di giri più basso del motore indipendentemente dal
valore di riferimento del numero di giri. Un numero di giri minimo, ad es., è indicato per i
ventilatori o per le pompe.
● Numero di giri massimo - impostazione di fabbrica 1500 [1/min]
Il convertitore limita il numero di giri del motore a questo valore.
Quali tempi di accelerazione e decelerazione del motore richiede l'applicazione?
Il tempo di accelerazione e il tempo di decelerazione determinano l'accelerazione massima
del motore in caso di modifiche del valore di riferimento del numero di giri. Il tempo di
accelerazione e quello di decelerazione indicano il tempo che il motore impiega a passare
dallo stato di fermo alla velocità massima impostata o viceversa.
● Tempo di accelerazione - Impostazione di fabbrica 10 s
● Tempo di decelerazione - Impostazione di fabbrica 10 s
Convertitori con le Control Unit CU240B-2 e CU240E-2
74
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.3 Ripristino delle impostazioni di fabbrica
5.3
Ripristino delle impostazioni di fabbrica
Esistono casi in cui durante la messa in servizio si verificano dei problemi, ad es.
● Durante la messa in servizio la tensione di rete si interrompe e non è possibile terminare
la messa in servizio.
● Si è commesso un errore durante la messa in servizio e non è più possibile correggere le
singole impostazioni.
● Non si sa se il convertitore è già stato messo in servizio una volta.
In questi casi ripristinare le impostazioni di fabbrica del convertitore.
Ripristino delle impostazioni di fabbrica delle funzioni di sicurezza
Se in un convertitore sono abilitate le funzioni di sicurezza, le impostazioni delle funzioni di
sicurezza sono protette da una password. Per ripristinare le impostazioni delle funzioni di
sicurezza occorre conoscere la password.
Procedura
Pe ripristinare le impostazioni di fabbrica delle funzioni di sicurezza del convertitore,
procedere nel seguente modo:
1. Passare online.
2. Richiamare la maschera delle funzioni di
sicurezza
3. Nella maschera "Safety Integrated"
selezionare il pulsante per il ripristino
dell'impostazione di fabbrica.
1. Impostare p0010 = 30
Attivare il ripristino delle impostazioni.
2. p9761 = …
Immettere la password per le funzioni di
sicurezza
3. Avviare il ripristino con p970 = 5
Quando il convertitore avrà ripristinato le
impostazioni, il parametro impostato diventerà
p0970 = 0.
4. Disinserire la tensione di alimentazione del convertitore.
5. Attendere lo spegnimento di tutti i LED del convertitore.
6. Reinserire la tensione di alimentazione del convertitore.
Le impostazioni di fabbrica delle funzioni di sicurezza del convertitore sono state ripristinate.
Ripristino delle impostazioni di fabbrica del convertitore
Procedura
Pe ripristinare le impostazioni di fabbrica del convertitore, procedere nel seguente modo:
1. Passare online
2. Fare clic sul pulsante
1. Nel menu "Strumenti" selezionare
"DRVRESET"
2. Premere OK per confermare il ripristino
Le impostazioni di fabbrica del convertitore sono state ripristinate.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
75
Messa in servizio
5.4 Messa in servizio di base
5.4
Messa in servizio di base
5.4.1
Messa in servizio di base con l'Operator Panel BOP-2
Installazione del Basic Operator Panel BOP-2
Procedura
Per installare l'Operator Panel BOP-2, procedere nel seguente modo:
1. Inserire l'angolo inferiore della custodia del BOP-2 nella scanalatura
della custodia del convertitore prevista a questo scopo.
2. Premere il BOP-2 sul convertitore finché il meccanismo di sblocco
scatta in posizione.
Se si mette il convertitore sotto tensione, l'Operator Panel BOP-2 è pronto per il
funzionamento.
Impostazione dei dati della messa in servizio di base
La messa in servizio di base è la prima operazione della messa in servizio. L'Operator Panel
BOP-2 guida l'utente attraverso la messa in servizio di base e chiede di impostare i dati
principali del convertitore.
Presupposto
L'Operator Panel BOP-2 è stato innestato sul convertitore e il
convertitore è sotto tensione.
L'Operator Panel è stato avviato e visualizza valori di riferimento e valori
attuali.
Convertitori con le Control Unit CU240B-2 e CU240E-2
76
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.4 Messa in servizio di base
Procedura
Per immettere i dati per la messa in servizio di base, procedere nel modo seguente:
1.
Premere il tasto ESC.
2.
Premere uno dei tasti freccia finché sul BOP-2 non viene visualizzato il menu
"SETUP".
3.
Nel menu "SETUP" premere il tasto OK per avviare la messa in
servizio di base.
4.
Se prima della messa in servizio di base si desidera ripristinare tutti i
parametri alle impostazioni di fabbrica:
4.1.
Commutare la visualizzazione con un tasto freccia: nO → YES
4.2.
Premere il tasto OK.
5.
Selezionare il tipo di regolazione del motore. Seguono i principali tipi
di regolazione:
VF LIN
Controllo U/f con curva caratteristica lineare per
applicazioni semplici, ad es. nastro trasportatore
orizzontale.
VF QUAD
Controllo U/f con curva caratteristica quadratica per
applicazioni semplici di pompe e ventilatori.
SPD N EN Si consiglia la regolazione del numero di giri.
I tipi di regolazione sono descritti nelle istruzioni operative del
convertitore.
6. Trasferire i dati dalla targhetta dei dati tecnici del motore al convertitore:
6.1.
Norma motori
KW 50HZ IEC
6.2.
HP 60HZ NEMA
KW 60HZ IEC 60 Hz
Tensione nominale
6.3.
Corrente nominale
6.4.
Potenza IEC (kW)
NEMA (HP)
6.5.
N. di giri nominale
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
77
Messa in servizio
5.4 Messa in servizio di base
7.
Identificazione dati del motore
Scegliere il metodo con il quale il convertitore misura i dati del
motore collegato:
OFF
Nessuna misura dei dati motore.
STIL ROT Impostazione consigliata: Misura dati motore da fermo e
con motore in rotazione
STILL
Misura dati motore da fermo.
Scegliere questa impostazione in presenza di una delle
seguenti condizioni:
• Come tipo di regolazione è stato impostato
"SPD N EN", ma il motore non può girare liberamente,
ad es. in un campo di movimento limitato.
• Come tipo di regolazione è stato impostato un
controllo U/f, ad es. "VF LIN" o "VF QUAD".
8.
9.
ROT
Misura dati motore con motore in rotazione.
Per le interfacce del convertitore scegliere la configurazione adatta
alla propria applicazione. Le configurazioni possibili sono riportate
nel capitolo: Selezione delle impostazioni adeguate delle interfacce
(Pagina 55)
coN 2 SP
coN SAFE
coN 4 SP
Macro 1
Macro 2
Macro 3
Std ASPS
Proc FB
Proc
Macro 13
Macro 14
Macro 15
coN Fb
coN Fb S
Fb SAFE
Fb cdS
Macro 4
Macro 5
Macro 6
Macro 7
2-wire
2-wire
3-wire
3-wire
Macro 17
Macro 18
Macro 19
Macro 20
MoP SAFE
Macro 8
USS
Macro 21
Std MoP
Macro 9
CAN
Std ASP
Macro 12
Impostare il numero di giri minimo del
motore.
Macro 22
1
2
1
2
10.
Impostare il tempo di
accelerazione del motore.
11.
Impostare il tempo di
decelerazione del motore.
12.
Concludere la messa in servizio di base:
12.1.
Commutare la visualizzazione con un tasto
freccia: nO → YES
12.2.
Premere il tasto OK.
Convertitori con le Control Unit CU240B-2 e CU240E-2
78
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.4 Messa in servizio di base
Sono stati immessi tutti i dati necessari per la messa in servizio di base del convertitore.
Identificazione dei dati motore e ottimizzazione della regolazione
Dopo la messa in servizio di base, il convertitore deve generalmente misurare altri dati
motore e ottimizzare il regolatore di corrente e di numero di giri.
Per avviare l'identificazione dei dati motore, occorre inserire il motore. Non importa se il
comando ON viene dato da morsettiera, bus di campo o Operator Panel.
AVVERTENZA
Pericolo di danni materiali o lesioni personali dovuti a movimenti della macchina
all'inserzione del motore
L'inserzione del motore durante l'identificazione del motore può provocare movimenti della
macchina pericolosi.
Prima di avviare l'identificazione dei dati del motore, proteggere accuratamente le parti
pericolose dell'impianto:
• Prima dell'inserzione accertarsi che nessuna parte della macchina possa staccarsi o
essere proiettata verso l'esterno.
• Prima dell'inserzione accertarsi che nessuno stia lavorando sulla macchina o si trovi
nell'area di lavoro della macchina.
• Proteggere l'area di lavoro della macchina in modo da evitare la presenza accidentale di
persone.
• Abbassare a terra i carichi sospesi.
Presupposti
● Nella messa in servizio di base è stata selezionata l'identificazione motore (MOT ID). In
questo caso dopo la conclusione della messa in servizio di base il convertitore emette
l'avviso A07991.
Un avviso attivo è contrassegnato dal simbolo corrispondente nel BOP-2.
● Il motore è raffreddato alla temperatura ambiente.
Se il motore è troppo caldo, l'identificazione dei dati motore fornisce valori errati e la
regolazione del numero di giri può diventare instabile.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
79
Messa in servizio
5.4 Messa in servizio di base
Procedura
Per avviare l'identificazione dei dati motore e l'ottimizzazione della regolazione motore,
procedere nel modo seguente:
1.
⇒
Premere il tasto HAND/AUTO. Il BOP-2 visualizza il simbolo
HAND.
2.
Accendere il motore.
3.
Attendere finché il convertitore non disinserisce il motore al termine
dell'identificazione dei dati motore. La misura richiede diversi
secondi.
4.
Salvare i risultati della misura in modo che siano protetti contro le
interruzioni di rete.
Se si è selezionata anche una misura in rotazione oltre
all'identificazione dei dati motore, il convertitore emette
nuovamente l'avviso A07991.
5.
Riaccendere il motore per ottimizzare la regolazione del numero di
giri.
6.
Attendere finché il convertitore non disinserisce il motore al termine
dell'identificazione dei dati motore. L'ottimizzazione può durare fino
a un minuto.
Commutare il controllo del convertitore da HAND a AUTO.
7.
8.
Salvare i risultati della misura in modo che siano protetti contro le
interruzioni di rete.
L'identificazione dei dati motore è terminata e la regolazione del numero di giri è ottimizzata.
Convertitori con le Control Unit CU240B-2 e CU240E-2
80
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.4 Messa in servizio di base
5.4.2
Messa in servizio di base con STARTER
STARTER e maschere di STARTER
STARTER è un tool per PC per la messa in servizio dei convertitori Siemens. L'interfaccia
grafica utente di STARTER supporta l'utente durante la messa in servizio del convertitore. In
STARTER, la maggior parte delle funzioni del convertitore è riunita nelle "Maschere".
La maschere di STARTER raffigurate in questo manuale rappresentano esempi generali. Di
conseguenza, nel caso specifico una finestra di dialogo può disporre di un numero maggiore
o minore di opzioni rispetto a quelle descritte in queste istruzioni. Analogamente, una
procedura di messa in servizio basata su un altro convertitore può differenziarsi rispetto a
quella utilizzata qui raffigurata.
Panoramica: Messa in servizio del convertitore online
Si consiglia di eseguire la messa in servizio del convertitore con STARTER. STARTER offre
due possibilità per passare online con un convertitore:
● attraverso l'interfaccia USB
● tramite PROFIBUS o PROFINET
Presupposto
Per la messa in servizio del convertitore con STARTER sono necessari:
● Un azionamento già installato e pronto (motore e convertitore)
● Un computer con Windows XP o Windows 7 sul quale è installato STARTER V4.3 o
versione successiva.
Gli aggiornamenti per STARTER sono reperibili in Internet all'indirizzo: Percorso di
download dell'aggiornamento per STARTER
(http://support.automation.siemens.com/WW/view/it/10804985/133100)
Procedura
Per eseguire la messa in servizio di base online con STARTER, procedere nel seguente
modo:
1. Adattare le interfacce del convertitore e del PC:
– Passaggio online tramite USB:Adattamento dell'interfaccia USB (Pagina 82)
– Passaggio online tramite PROFINET:
Adattamento dell'interfaccia PROFINET (Pagina 83)
Configurare la comunicazione tra convertitore e PC: Configurazione della
comunicazione PROFINET in STEP 7 (Pagina 379).
2. Creare un progetto STARTER (Pagina 84).
3. Passare online e mettere in servizio il convertitore tramite il wizard (Pagina 84).
La messa in servizio di base è completata.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
81
Messa in servizio
5.4 Messa in servizio di base
5.4.2.1
Adattamento delle interfacce
Adattamento dell'interfaccia USB
Procedura
Per impostare l'interfaccia USB, procedere nel seguente modo:
1. Inserire la tensione di alimentazione del convertitore e collegare il convertitore e il PC
tramite l'USB.
2. Se si stanno collegando convertitore e PC per la prima volta, è necessario installare i
driver USB. Windows 7 installa i driver automaticamente. Nelle versioni di Windows meno
recenti, occorre confermare le maschere corrispondenti con OK.
3. Avviare il software di messa in servizio STARTER.
4. Quando si utilizza STARTER per la prima volta, è necessario controllare l'impostazione
("Nodi/partner
dell'interfaccia USB. A questo scopo, fare clic in STARTER su
raggiungibili").
Se l'interfaccia è impostata correttamente, la maschera "Nodi/partner raggiungibili"
mostra i convertitori collegati tramite l'interfaccia USB. In questo caso passare al punto 7.
Se non è impostata correttamente, viene visualizzato il messaggio "Non sono stati trovati
altri nodi".
5. Confermare il messaggio e impostare il "Punto di accesso" a "DEVICE (STARTER,
Scout)" e l'interfaccia "PG/PC" a "S7USB".
6. Quindi fare clic su "Aggiorna". Nella maschera "Nodi/partner raggiungibili" vengono a
questo punto visualizzati i convertitori collegati.
7. Chiudere la maschera senza selezionare i convertitori trovati.
8. Creare il progetto STARTER (Pagina 84).
L'interfaccia USB è stata impostata.
Convertitori con le Control Unit CU240B-2 e CU240E-2
82
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.4 Messa in servizio di base
Adattamento dell'interfaccia PROFINET
Per mettere in servizio il convertitore con STARTER tramite PROFINET, è necessario
indirizzare correttamente il PC e assegnare a STARTER l'interfaccia tramite la quale deve
passare online con il convertitore.
Procedura
Per indirizzare il convertitore, procedere nel seguente modo:
1. Realizzare il collegamento del bus.
2.
3.
4.
5.
6.
7.
8.
Vedere la sezione Comunicazione
tramite PROFINET (Pagina 104))
Tramite il Pannello di controllo,
assegnare al PC l'indirizzo IP e
l'indirizzo della maschera di sottorete:
Selezionare "Start / Impostazioni /
Pannello di controllo".
Selezionare "Connessioni di rete".
Con il pulsante destro del mouse aprire
la finestra delle proprietà del
collegamento LAN.
In questa finestra selezionare "Internet
Protocol (TCP/IP)"
Selezionare "Proprietà".
Impostare come indirizzo IP del
supervisor 192.168.0.100 e come
maschera di sottorete 255.255.255.0.
In una rete aziendale è possibile che vi
siano altri valori per l'indirizzo IP e la
maschera di sottorete. Questi valori
vanno richiesti all'amministratore della
rete.
9. Aprire SIMATIC Manager.
10.Tramite "Strumenti / Imposta interfaccia
PG/PC" assegnare l'interfaccia TCP/P
"Intel(R) PRO/100 VE Network
Connection".
Sono stati assegnati al PC l'indirizzo IP e l'indirizzo della maschera di sottorete ed è stata
definita l'interfaccia PC tramite la quale STARTER passa online con il convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
83
Messa in servizio
5.4 Messa in servizio di base
5.4.2.2
Creazione del progetto STARTER
Creazione del progetto con il wizard di progetto STARTER
Procedura
Per creare un progetto con il wizard di progetto STARTER, procedere nel seguente modo:
1. Creare un nuovo progetto
selezionando "Progetto / Nuovo
con wizard".
2. All'inizio del wizard fare clic su
"Ricerca apparecchi di
azionamento online...".
3. Seguire le istruzioni del wizard
ed eseguire tutte le
impostazioni necessarie per il
progetto.
Il progetto STARTER è stato creato.
5.4.2.3
Passaggio online e avvio del wizard per la messa in servizio di base
Procedura
Per avviare la messa in servizio di base online con il convertitore, procedere nel seguente
modo:
1. Selezionare il progetto e andare online: .
2. Selezionare l'apparecchio o gli apparecchi con i quali
si intende passare online.
3. Caricare la configurazione hardware trovata online
nel progetto (PG o PC). STARTER mostra i
convertitori online e quelli offline:
② Il convertitore è online
③ Il convertitore è offline
4. Se si è online, fare doppio clic su "Control Unit".
5. Avviare il wizard per la messa in servizio di base.
Si è online e la messa in servizio di base è stata avviata.
Convertitori con le Control Unit CU240B-2 e CU240E-2
84
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.4 Messa in servizio di base
5.4.2.4
Esecuzione della messa in servizio di base
Procedura
Per eseguire la messa in servizio di base, procedere nel seguente modo:
1.
Selezionare il tipo di regolazione.
Vedere anche la sezione: Controllo U/f o regolazione di velocità?
(Pagina 73)
2.
Selezionare la preimpostazione delle interfacce del convertitore.
Vedere anche la sezione: Selezione delle impostazioni adeguate delle
interfacce (Pagina 55).
3.
Selezionare l'applicazione per il convertitore:
Leggero sovraccarico per applicazioni poco dinamiche, ad es. pompe
o ventilatori.
Elevato sovraccarico per applicazioni dinamiche, ad es. tecnica dei
trasporti industriali.
4.
5.
Selezionare il motore utilizzato.
Immettere i dati motore indicati sulla targhetta dei dati tecnici.
Se è stato selezionato un motore in base al numero di ordinazione, i
dati sono già immessi.
6.
Se come tipo di regolazione è stato impostato "Regolazione di
velocità", si consiglia di selezionare l'impostazione "[1] Identificazione
dati motore in stato di fermo e a motore rotante".
Con questa impostazione il convertitore ottimizza il regolatore del
numero di giri.
Se si verifica uno dei seguenti casi, scegliere l'impostazione
"[2] Identificazione dati motore in stato di fermo":
• Come tipo di regolazione è stato impostato "Regolazione di
velocità", ma il motore non può girare liberamente, ad es. nei
percorsi di movimento limitati.
• Il tipo di regolazione impostato è "Controllo U/f".
7.
Impostare i parametri principali in base all'applicazione utilizzata.
8.
Si consiglia di selezionare l'impostazione "Calcola solo dati del
motore".
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
85
Messa in servizio
5.4 Messa in servizio di base
9.
Selezionare l'opzione "Copia da RAM a ROM (salvare i dati
nell'azionamento)" per salvare i dati nel convertitore in modo
permanente.
Concludere la messa in servizio di base.
Sono stati immessi tutti i dati necessari per la messa in servizio di base del convertitore.
5.4.2.5
Identificazione dei dati del motore
Presupposti
● Nella messa in servizio di base è stata selezionata l'identificazione motore (MOT ID). In
questo caso dopo la conclusione della messa in servizio di base il convertitore emette
l'avviso A07991.
● Il motore è raffreddato alla temperatura ambiente.
Se il motore è troppo caldo, l'identificazione dei dati motore fornisce valori errati e la
regolazione del numero di giri diventa instabile.
PERICOLO
Pericolo di danni materiali o lesioni personali dovuti a movimenti della macchina
all'inserzione del motore
L'inserzione del motore durante l'identificazione del motore può provocare movimenti della
macchina pericolosi.
Prima di avviare l'identificazione dei dati del motore, proteggere accuratamente le parti
pericolose dell'impianto:
• Prima dell'inserzione accertarsi che nessuna parte della macchina possa staccarsi o
essere proiettata verso l'esterno.
• Prima dell'inserzione accertarsi che nessuno stia lavorando sulla macchina o si trovi
nell'area di lavoro della macchina.
• Proteggere l'area di lavoro della macchina in modo da evitare la presenza accidentale di
persone.
• Abbassare a terra i carichi sospesi.
Convertitori con le Control Unit CU240B-2 e CU240E-2
86
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Messa in servizio
5.4 Messa in servizio di base
Procedura
Per avviare l'identificazione dei dati motore e l'ottimizzazione della regolazione motore,
procedere nel modo seguente:
1. Fare doppio clic per aprire il pannello di comando
in STARTER.
2. Impostare la priorità di comando per il
convertitore.
3. Impostare le "Abilitazioni"
4. Accendere il motore.
Il convertitore avvia l'identificazione dei dati del
motore. Questa misurazione può durare alcuni
minuti. Al termine il convertitore disinserisce il
motore.
5. Dopo l'identificazione dei dati del motore
annullare la priorità di comando.
6. Fare clic sul pulsante
RAM a ROM).
per salvare (Copia da da
L'identificazione dei dati del motore è conclusa.
Auto-ottimizzazione della regolazione
Se oltre all'identificazione del motore è stata selezionata una misura in rotazione con autoottimizzazione della regolazione del numero di giri, è necessario inserire nuovamente il
motore come sopra descritto e attendere il ciclo di ottimizzazione.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
87
Messa in servizio
5.4 Messa in servizio di base
Convertitori con le Control Unit CU240B-2 e CU240E-2
88
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Adattamento della morsettiera
6
Questo capitolo descrive l'adattamento della funzione di singoli ingressi e uscite del
convertitore.
Se si adatta la funzione di un ingresso o di un'uscita, si sovrascrivono le impostazioni della
messa in servizio di base.
Vedere anche i seguenti capitoli:
● Messa in servizio di base (Pagina 76)
● Selezione delle impostazioni adeguate delle interfacce (Pagina 55)
● Interconnessione dei segnali nel convertitore (Pagina 372)
1
Non disponibile con le Control Unit CU240B-2 e CU240B-2 DP
Figura 6-1
Interconnessione interna degli ingressi e delle uscite
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
89
Adattamento della morsettiera
6.1 Ingressi digitali
6.1
Ingressi digitali
Per modificare la funzione di un ingresso digitale,
collegare il parametro di stato dell'ingresso digitale con
un ingresso binettore a scelta.
Gli ingressi binettore sono identificati con "BI" nella
lista dei parametri del Manuale delle liste.
1Non
disponibile con le Control Unit
CU240B-2 e CU240B-2 DP
Tabella 6- 1
Ingressi binettore (BI) del convertitore (selezione)
BI
Significato
BI
Significato
p0810
Selezione set di dati di comando CDS bit p1036 Potenziometro motore, valore di
0
riferimento inferiore
p0840
ON / OFF1
p1055 Funzionamento a impulsi bit 0
p0844
OFF2
p1056 Funzionamento a impulsi bit 1
p0848
OFF3
p1113 Inversione del valore di riferimento
p0852
Abilitazione funzionamento
p1201 Sorgente segnale abilitazione
riavviamento al volo
p0855
Aprire obbligatoriamente freno di
stazionamento
p2103 1. Tacitazione anomalie
p0856
Abilita regolatore del numero di giri
p2106 Anomalia esterna 1
p0858
Chiudere obbligatoriamente freno di
stazionamento
p2112 Avviso esterno 1
p1020
Selezione del valore di riferimento fisso
del numero di giri bit 0
p2200 Regolatore PID, abilitazione
p1021
Selezione del valore di riferimento fisso
del numero di giri bit 1
p3330 Controllo a due fili/a tre fili, comando di
controllo 1
p1022
Selezione del valore di riferimento fisso
del numero di giri bit 2
p3331 Controllo a due fili/a tre fili, comando di
controllo 2
p1023
Selezione del valore di riferimento fisso
del numero di giri bit 3
p3332 Controllo a due fili/a tre fili, comando di
controllo 3
p1035
Potenziometro motore, valore di
riferimento superiore
L'elenco completo degli ingressi binettore si trova nel Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
90
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Adattamento della morsettiera
6.1 Ingressi digitali
Modifica della funzione di un ingresso digitale
Esempio
Si vogliono confermare i messaggi di anomalia del convertitore tramite l'ingresso digitale
DI 1.
Procedura
Per confermare le anomalie tramite l'ingresso digitale DI 1, procedere nel seguente modo:
1. Selezionare il menu
"PARAMS".
2. Selezionare come filtro
parametri "EXPERT".
3. Impostare
p2103 = 722.1
1. Passare online.
2. Selezionare
"Ingressi/uscite".
3. Modificare la funzione
dell'ingresso tramite la
maschera
corrispondente.
L'ingresso digitale DI 1 è stato interconnesso con il comando per la conferma delle anomalie.
Impostazioni avanzate
Il parametro p0724 consente di realizzare l'antirimbalzo del segnale dell'ingresso digitale.
Ulteriori informazioni sono disponibili nella lista dei parametri e negli schemi logici 2220 e
segg. del Manuale delle liste.
Ingressi analogici come ingressi digitali
In casi specifici è possibile utilizzare gli ingressi analogici come ingressi digitali
supplementari.
Figura 6-2
Ingressi digitali supplementari
disponibile con le Control Unit CU240B-2 e CU240B-2 DP
1Non
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
91
Adattamento della morsettiera
6.2 Ingresso fail-safe
6.2
Ingresso fail-safe
In questo manuale viene descritta la funzione di sicurezza STO con comando tramite un
ingresso fail-safe. Tutte le altre funzioni di funzioni di sicurezza, altri ingressi digitali fail-safe
del convertitore e il comando delle funzioni di sicurezza tramite PROFIsafe sono descritti nel
manuale di guida alle funzioni Safety Integrated.
Definizione dell'ingresso fail-safe
Quando si utilizza la funzione di sicurezza STO, è necessario configurare la morsettiera
nella messa in servizio di base per un ingresso fail-safe, ad es. con p0015 = 2 (vedere la
sezione Selezione delle impostazioni adeguate delle interfacce (Pagina 55)).
Il convertitore riunisce gli ingressi digitali DI 4 e DI 5 in un ingresso fail-safe.
Per selezionare la funzione di sicurezza STO tramite FDI 0 è
necessario sbloccare STO.
Vedere anche la sezione: Funzione di sicurezza Safe Torque
Off (STO) (Pagina 253).
Quali apparecchi si possono collegare?
Un ingresso fail-safe è progettato per i seguenti apparecchi:
● Collegamento di sensori di sicurezza, ad es. apparecchiature di comando con arresto di
emergenza o barriera ottica.
● Collegamento di dispositivi di sicurezza con funzionalità di pre-elaborazione, ad es.
controllori fail-safe.
Stati del segnale sull'ingresso fail-safe
Il convertitore attende i seguenti segnali sull'ingresso fail-safe con lo stesso stato:
● Segnale HIGH: La funzione di sicurezza è disattivata.
● Segnale LOW: La funzione di sicurezza è attivata.
Misure particolari nel cablaggio di un ingresso fail-safe
Il convertitore valuta gli scostamenti dei due segnali dell'ingresso fail-safe. Durante
l'operazione il convertitore riconosce ad es. i seguenti errori:
● Rottura cavo
● Sensore difettoso
Il convertitore può non riconoscere i seguenti errori:
● Cortocircuito trasversale di entrambi i cavi
● Cortocircuito tra cavo di segnale e tensione di alimentazione di 24 V
Convertitori con le Control Unit CU240B-2 e CU240E-2
92
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Adattamento della morsettiera
6.3 Uscite digitali
Le possibilità di ridurre il rischio di cavi danneggiati mentre la macchina o l'impianto è in
funzione sono le seguenti:
● Utilizzare cavi schermati con schermatura messa a terra.
● Posare i cavi di segnale in tubi d'acciaio.
Questi tipi particolari di posa dei cavi sono generalmente richiesti nella posa su lunghe
distanze, ad es. tra armadi elettrici collocati a una certa distanza l'uno dall'altro.
Per esempi di collegamento di un ingresso fail-safe vedere la sezione: Collegamento di
ingressi digitali fail-safe (Pagina 393).
Nota
Le Control Unit CU240B-2 e CU240B-2 DP non dispongono di alcun ingresso digitale failsafe.
6.3
Uscite digitali
Per modificare la funzione di un'uscita
digitale, collegare il parametro
dell'ingresso digitale con un'uscita
binettore a scelta.
Le uscite binettore sono identificate con
"BO" nella lista dei parametri del Manuale
delle liste.
1Non
disponibile con le Control Unit CU240B-2 e
CU240B-2 DP
Tabella 6- 2
Uscite binettore (BO) del convertitore (selezione)
0
Disattivazione uscita digitale
r0052.9
Controllo PZD
r0052.0
Azionamento pronto
r0052.10
f_att >= p1082 (f_max)
r0052.1
Azionamento pronto al
funzionamento
r0052.11
Avviso: Limitazione di corrente
motore/coppia
r0052.2
Azionamento in funzione
r0052.12
Freno attivo
r0052.3
Anomalia azionamento attiva
r0052.13
Sovraccarico motore
r0052.4
OFF2 Attivo
r0052.14
Rotazione destrorsa motore
r0052.5
OFF3 Attivo
r0052.15
Sovraccarico convertitore
r0052.6
Blocco inserzione attivo
r0053.0
Frenatura in corrente continua attiva
r0052.7
Avviso azionamento attivo
r0053.2
f_att > p1080 (f_min)
r0052.8
Scostamento valore di
riferimento/valore attuale
r0053.6
f_att ≥ valore di riferimento (f_rif)
L'elenco completo delle uscite binettore si trova nel Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
93
Adattamento della morsettiera
6.4 Ingressi analogici
Modifica della funzione di un'uscita digitale
Esempio
Si vogliono confermare i messaggi di anomalia del convertitore tramite l'uscita digitale DO 1.
Procedura
Per interconnettere l'uscita digitale DO 1 con il messaggio di anomalia, procedere nel
seguente modo:
1. Selezionare il menu
"PARAMS".
1. Passare online.
2.
2. Selezionare come filtro
parametri "EXPERT".
3.
3. Impostare
p0731 = 52.3
Selezionare
"Ingressi/uscite".
Modificare la funzione
dell'uscita tramite la
maschera
corrispondente.
L'uscita digitale DO 1 è stata interconnessa con il messaggio di anomalia.
Impostazioni avanzate
È possibile invertire il segnale dell'uscita digitale con il parametro p0748.
Ulteriori informazioni sono disponibili nella lista dei parametri e negli schemi logici 2230 e
segg. del Manuale delle liste.
6.4
Ingressi analogici
Per modificare la funzione di un ingresso
analogico, procedere nel seguente modo:
1. Definire il tipo di ingresso analogico
2. Adattare la curva caratteristica
dell'ingresso analogico.
3. Adattare l'interconnessione interna
1Non disponibile con le Control Unit CU240B-2
dell'ingresso analogico.
e CU240B-2 DP
Convertitori con le Control Unit CU240B-2 e CU240E-2
94
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Adattamento della morsettiera
6.4 Ingressi analogici
Definizione del tipo di ingresso analogico
Procedura
Per definire il tipo di ingresso analogico, procedere nel modo seguente:
1. Impostare p0756 al valore adeguato.
AI 0
Ingresso di tensione unipolare
Ingresso di tensione unipolare sorvegliato
Ingresso di corrente unipolare
Ingresso di corrente unipolare sorvegliato
Ingresso di tensione bipolare
Nessun sensore collegato
0 V … +10 V
+2 V … +10 V
0 mA … +20 mA
+4 mA … +20 mA
-10 V … +10 V
p0756[0] =
0
1
2
3
4
8
AI 1
Ingresso di tensione unipolare
Ingresso di tensione unipolare sorvegliato
Ingresso di corrente unipolare
Ingresso di corrente unipolare sorvegliato
Ingresso di tensione bipolare
Nessun sensore collegato
0 V … +10 V
+2 V … +10 V
0 mA … +20 mA
+4 mA … +20 mA
-10 V … +10 V
p0756[1] =
0
1
2
3
4
8
2. Impostare lo switch corrispondente all'ingresso analogico. Lo switch si trova sulla Control
Unit, dietro allo sportello frontale inferiore.
•
Ingresso di tensione: posizione interruttore U (impostazione di
fabbrica)
•
Ingresso di corrente: posizione interruttore I
Il tipo di ingresso analogico è stato definito.
Curva caratteristica dell'ingresso analogico
Quando si modifica il tipo di ingresso analogico con p0756, il convertitore seleziona
autonomamente la normazione adeguata dell'ingresso analogico. La curva caratteristica di
normazione lineare viene fissata tramite due punti (p0757, p0758) e (p0759, p0760). I
parametri p0757 … p0760 sono assegnati tramite il loro indice ad un ingresso analogico, ad
es. i parametri p0757[0] … p0760[0] fanno riferimento all'ingresso analogico 0.
Figura 6-3
Esempi di curve caratteristiche di normazione
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
95
Adattamento della morsettiera
6.4 Ingressi analogici
Parametri
Descrizione
p0757
Coordinata x del 1° punto della curva caratteristica [V oppure mA]
p0758
Coordinata y del 1° punto della curva caratteristica [% di p200x]
p200x sono i parametri delle misure di riferimento, ad es. p2000 è il numero di giri di
riferimento
p0759
Coordinata x del 2° punto della curva caratteristica [V oppure mA]
p0760
Coordinata y del 2° punto della curva caratteristica [% di p200x]
p0761
Soglia di intervento per sorveglianza rottura conduttori
Adattamento della curva caratteristica dell'ingresso analogico
Quando nessuno dei tipi preimpostati è adatto all'applicazione, è necessario specificare una
propria curva caratteristica.
Esempio
Il convertitore deve convertire tramite l'ingresso analogico 0 un segnale di 6 mA … 12 mA
nel campo di valori -100 % … 100 %. Quando non viene raggiunto il valore di 6 mA, deve
intervenire la sorveglianza rottura conduttori del convertitore.
Procedura
Per adattare la curva caratteristica con i valori indicati nell'esempio, procedere nel seguente
modo:
1. Impostare p0756[0] = 3
È stato definito l'ingresso analogico 0 come ingresso di corrente con sorveglianza della
rottura conduttore.
Dopo la modifica p0756 = 3 il convertitore imposta la curva caratteristica di normazione ai
seguenti valori (vedere sopra l'esempio per la curva caratteristica di normazione):
p0757[0] = 4,0, p0758[0] = 0,0, p0759[0] = 20, p0760[0] = 100
2. Impostare il DIP switch per AI 0 su ingresso di corrente ("I").
3. Adeguare la curva caratteristica:
p0757[0] = 6,0
p0758[0] = -100,0
p0759[0] = 12,0
p0760[0] = 100,0
Caratteristica degli ingressi analogici
(x 1, y 1)
6 mA corrisponde a -100%
Caratteristica degli ingressi analogici
(x 2, y 2)
12 mA corrisponde a 100%
Convertitori con le Control Unit CU240B-2 e CU240E-2
96
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Adattamento della morsettiera
6.4 Ingressi analogici
La curva caratteristica dell'ingresso analogico è stata adattata con i valori indicati
nell'esempio.
Interconnessione interna dell'ingresso analogico
Per specificare la funzione dell'ingresso analogico, interconnettere un ingresso connettore a
scelta con il parametro p0755 . Il parametro p0755 viene assegnato tramite il suo indice al
corrispondente ingresso analogico, ad es. il parametro p0755[0] riguarda l'ingresso
analogico 0.
Tabella 6- 3
Ingressi connettore (CI) del convertitore (selezione)
CI
Significato
CI
Significato
p1070
Valore di riferimento principale
p1522 Limite di coppia superiore
p1075
Valore di riferimento aggiuntivo
p2253 Regolatore tecnologico, valore di
riferimento 1
p1503
Valore di riferimento di coppia
p2264 Regolatore tecnologico, valore reale
p1511
Coppia aggiuntiva 1
L'elenco completo degli ingressi connettore si trova nel Manuale delle liste.
Adattamento dell'interconnessione interna dell'ingresso analogico
Esempio
Il convertitore deve ricevere il valore di riferimento aggiuntivo tramite l'ingresso analogico
AI 0.
Procedura
Per interconnettere l'ingresso analogico con il valore di riferimento aggiuntivo, procedere nel
seguente modo:
1. Selezionare il menu
"PARAMS".
2. Selezionare come filtro
parametri "EXPERT".
3. Impostare p1075 = 755[0]
1. Passare online.
2. Selezionare
"Ingressi/uscite".
3. Modificare la funzione
dell'ingresso tramite la
maschera corrispondente.
L'ingresso analogico è stato interconnesso con il valore di riferimento aggiuntivo.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
97
Adattamento della morsettiera
6.4 Ingressi analogici
Impostazioni avanzate
Livellamento del segnale
In casi specifici è possibile livellare il segnale, leggibile tramite un ingresso analogico, con il
parametro p0753.
Ulteriori informazioni sono disponibili nella lista dei parametri e negli schemi logici 9566 e
seguenti del Manuale delle liste.
Banda escludibile
Le interferenze presenti sul cavo possono falsare di alcuni millivolt i segnali piccoli. Per
impostare un valore di riferimento di 0 V esatti tramite un ingresso analogico, è necessario
definire una banda escludibile.
Figura 6-4
Banda escludibile dell'ingresso analogico
p0764[0]
Banda escludibile dell'ingresso analogico AI 0 (impostazione di fabbrica: 0)
p0764[1]
Banda escludibile dell'ingresso analogico AI 1 (impostazione di fabbrica: 0)
Convertitori con le Control Unit CU240B-2 e CU240E-2
98
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Adattamento della morsettiera
6.5 Uscite analogiche
6.5
Uscite analogiche
Per modificare la funzione dell'uscita
analogica, procedere nel seguente modo:
1. Definire il tipo di uscita analogica.
2. Impostare la curva caratteristica dell'uscita
analogica.
1Non
disponibile con le Control Unit
CU240B-2 e CU240B-2 DP
3. Adattare l'interconnessione interna
dell'uscita analogica.
Definizione del tipo di uscita analogica
Procedura
Per definire il tipo di uscita analogica, procedere nel modo seguente:
Impostare il parametro p0776 al valore adeguato:
AO 0
Uscita di corrente (impostazione di
fabbrica)
Uscita di tensione
Uscita di corrente
0 mA … +20 mA
0 V … +10 V
+4 mA … +20 mA
p0776[0] =
0
1
2
AO 1
Uscita di corrente (impostazione di
fabbrica)
Uscita di tensione
Uscita di corrente
0 mA … +20 mA
0 V … +10 V
+4 mA … +20 mA
p0776[1] =
0
1
2
Il tipo di uscita analogica è stato definito.
Curva caratteristica dell'uscita analogica
Quando si modifica il tipo dell'uscita analogica, il convertitore seleziona autonomamente la
relativa normazione adeguata. La curva caratteristica di normazione lineare viene fissata
tramite due punti (p0777, p0778) e (p0779, p0780).
Figura 6-5
Esempi di curve caratteristiche di normazione
I parametri p0777 … p0780 vengono assegnati ad un'uscita analogica tramite il loro indice,
ad es. i parametri p0777[0] … p0770[0] fanno riferimento all'uscita analogica 0.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
99
Adattamento della morsettiera
6.5 Uscite analogiche
Tabella 6- 4
Parametri
p0777
Parametri per la curva caratteristica di normazione
Descrizione
Coordinata x del 1° punto della curva caratteristica [% di p200x]
p200x sono i parametri delle misure di riferimento, ad es. p2000 è il numero di giri di
riferimento.
p0778
Coordinata y del 1° punto della curva caratteristica [V oppure mA]
p0779
Coordinata x del 2° punto della curva caratteristica [% di p200x]
p0780
Coordinata y del 2° punto della curva caratteristica [V oppure mA]
Impostazione della curva caratteristica dell'uscita analogica
Quando nessuno dei tipi preimpostati è adatto all'applicazione, è necessario specificare una
propria curva caratteristica.
Esempio:
Il convertitore deve convertire tramite l'uscita analogica 0 un segnale del campo di valori
-100% … 100% in un segnale di uscita 6 mA … 12 mA.
Procedura
Per adattare la curva caratteristica con i valori indicati nell'esempio, procedere nel seguente
modo:
1. Impostare p0776[0] = 2.
L'uscita analogica 0 è stata definita come uscita di corrente.
Dopo la modifica di p0776 = 2 il convertitore imposta i parametri della curva caratteristica
di normazione ai valori seguenti:
p0777[0] = 0,0; p0778[0] = 4,0; p0779[0] = 100,0; p0780[0] = 20,0
2. Adeguare la curva caratteristica:
p0777[0] = 0,0
Caratteristica dell'uscita analogica (x 1, y1)
p0778[0] = 6,0
0,0% corrisponde a 6 mA
p0779[0] = 100,0
Caratteristica dell'uscita analogica (x 2, y2)
p0780[0] = 12,0
100% corrisponde a 12 mA
La curva caratteristica dell'uscita analogica è stata adattata con i valori indicati nell'esempio.
Convertitori con le Control Unit CU240B-2 e CU240E-2
100
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Adattamento della morsettiera
6.5 Uscite analogiche
Interconnessione interna dell'uscita analogica
Per specificare la funzione dell'uscita analogica, collegare il parametro p0771 con un'uscita
connettore a scelta. Il parametro p0771 viene assegnato al corrispondente ingresso
analogico tramite il suo indice, ad es. il parametro p0771[0] riguarda l'uscita analogica 0.
Tabella 6- 5
Uscite connettore (CO) del convertitore (selezione)
CO
Significato
CO
Significato
r0021
Frequenza attuale
r0026
Valore attuale della tensione del circuito
intermedio
r0024
Frequenza attuale dell'uscita
r0027
Corrente di uscita
r0025
Tensione attuale dell'uscita
L'elenco completo delle uscite connettore si trova nel Manuale delle liste.
Ulteriori informazioni sono disponibili nella lista dei parametri e negli schemi logici 9572 e
segg. del Manuale delle liste.
Adattamento dell'interconnessione interna dell'uscita analogica
Esempio
Si vuole emettere la corrente d'uscita del convertitore tramite l'uscita analogica 0.
Procedura
Per interconnettere l'uscita analogica 0 con il segnale per la corrente di uscita, procedere nel
seguente modo:
1. Selezionare il menu
"PARAMS".
2. Selezionare come filtro
parametri "EXPERT".
3. Impostare p0771 = 27
1. Passare online.
2. Selezionare
"Ingressi/uscite".
3. Modificare la funzione
dell'uscita tramite la
maschera corrispondente.
L'uscita analogica 0 è stata interconnessa con il segnale per la corrente di uscita.
Impostazioni avanzate
È possibile manipolare il segnale che si emette tramite un'uscita analogica nel seguente
modo:
● Formazione del valore del segnale (p0775)
● Inversione del segnale (p0782)
Ulteriori informazioni sono disponibili nella lista dei parametri del Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
101
Adattamento della morsettiera
6.5 Uscite analogiche
Convertitori con le Control Unit CU240B-2 e CU240E-2
102
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
7
Configurazione del bus di campo
Interfacce del bus di campo delle Control Unit
Le Control Unit vengono proposte in diverse varianti per la comunicazione con controllori
sovraordinati con le interfacce del bus di campo riportate di seguito:
Bus di campo
Profilo
Control Unit
Interfaccia
PROFIBUS
(Pagina 107)
PROFIdrive e
PROFIsafe 1
CU240B-2 DP
CU240E-2 DP
CU240E-2 DP-F
Presa SUB-D
CU240E-2 PN
CU240E-2 PN-F
Due connettori RJ45
CU240B-2
CU240E-2
CU240E-2 F
Connettore RS485
PROFINET
(Pagina 104)
USS (Pagina 147)
-
Modbus RTU
(Pagina 158)
-
Informazioni su PROFIsafe sono riportate esclusivamente nel manuale di
guida alle funzioni Safety Integrated, vedere anche la sezione: Ulteriori
informazioni sul convertitore (Pagina 397).
1
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
103
Configurazione del bus di campo
7.1 Comunicazione tramite PROFINET
7.1
Comunicazione tramite PROFINET
La Control Unit offre le seguenti funzioni
• IRT senza sincronismo di clock
Ridondanza dei supporti, non ottimizzata con 200 ms
Requisito: Topologia ad anello
Ridondanza dei supporti, ottimizzata
• MRPD
Requisito: IRT e topologia ad anello creata nel
controllore
secondo le classi di errore corrispondenti definite nel
• Allarmi di diagnostica
profilo PROFIdrive. Vedere Attivazione della
diagnostica tramite il controllore (Pagina 107).
• Sostituzione di apparecchi senza Presupposto: topologia creata nel controllore
supporto rimovibile
• MRP
• Shared Device
solo per le Control Unit con funzioni fail-safe (vedere il
Manuale di guida alle funzioni Safety)
Le Control Unit dispongono di due connettori femmina RJ45 che consentono di realizzare
una topologia di linea. Impiegando degli switch è possibile realizzare tutte le topologie.
Ulteriori informazioni su PROFINET in Internet
Informazioni generali su PROFINET sono disponibili nella sezione Industrial Communication
(http://support.automation.siemens.com/WW/view/it/19292127).
La progettazione delle funzioni è descritta nel manuale PROFINET Descrizione del sistema
(http://www.automation.siemens.com/mcms/automation/en/industrialcommunications/profinet/Pages/Default.aspx).
7.1.1
Cosa occorre per la comunicazione tramite PROFINET?
Verificare le impostazioni di configurazione in base alla seguente tabella. Se è possibile
rispondere "Sì" ai quesiti significa che le impostazioni di configurazione sono state definite
correttamente ed è possibile controllare il convertitore tramite il bus di campo.
Quesiti
Risposta/Descrizione
Il convertitore è collegato
correttamente a PROFINET?
Vedere: Collegamento del
convertitore su PROFINET
(Pagina 105)
Esempio
L'indirizzo IP e il nome
dell'apparecchio nel convertitore e
nel controllore corrispondono?
Vedere Configurazione della
comunicazione con il controllore
(Pagina 106)
Vedere Progettazione di
controllore e convertitore
in Config HW (Pagina 379)
Nel convertitore è impostato lo
stesso telegramma del controllore
sovraordinato?
Per impostare il telegramma nel
convertitore vedere: Selezione
del telegramma - Procedura
(Pagina 106)
Vedere: Progettazione di
controllore e convertitore
in Config HW (Pagina 379)
I segnali che convertitore e
controllore scambiano tramite
PROFINET sono interconnessi
correttamente?
Per l'interconnessione conforme
a PROFIdrive nel convertitore
vedere: Profilo PROFIdrive per
PROFIBUS e PROFINET
(Pagina 111)
Vedere: Esempi di
programma STEP 7
(Pagina 384)
Convertitori con le Control Unit CU240B-2 e CU240E-2
104
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.1 Comunicazione tramite PROFINET
7.1.2
Collegamento del convertitore su PROFINET
Collegamento
Collegare il convertitore (IO-Device) e il rispettivo PG/PC (IO-Supervisor) al controllore
tramite i cavi PROFINET. La lunghezza massima ammessa per i cavi è 100 m.
Vedere anche la sezione: Interfacce, connettori, interruttori, morsettiere e LED della CU
(Pagina 51).
Figura 7-1
Esempio: PROFINET nella topologia di linea
Connettori PROFINET consigliati e assegnazione dei connettori
Si consiglia di utilizzare i seguenti connettori con il numero di ordinazione: 6GK1901-1BB102Ax0 per il collegamento del cavo PROFINET.
Le istruzioni per il montaggio di SIMATIC NET Industrial Ethernet FastConnect RF45 Plug
180 sono contenute nelle informazioni sul prodotto in Internet "Istruzioni di montaggio
SIMATIC NET Industrial Ethernet FastConnect RJ45 Plug
(http://support.automation.siemens.com/WW/view/en/37217116/133300)".
Posa e schermatura del cavo PROFINET
Ulteriori informazioni in proposito si trovano in Internet: Guida all'installazione PNO
(http://www.profibus.com/downloads/installation-guide/).
Comunicazione con il controllore anche con il Power Module scollegato dalla tensione di rete
Se la comunicazione con il controllore deve restare attiva quando viene disinserita la
tensione di rete, è necessario alimentare la Control Unit con DC 24 V tramite i morsetti 31 e
32.
In caso di brevi interruzioni della tensione di alimentazione a 24 V è possibile che il
convertitore segnali l'anomalia senza che venga interrotta la comunicazione con il
controllore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
105
Configurazione del bus di campo
7.1 Comunicazione tramite PROFINET
7.1.3
Configurazione della comunicazione con il controllore
Caricamento del GSDML
Per poter stabilire la comunicazione tra convertitore e controllore tramite PROFINET è
necessario il file di apparecchio del convertitore "GSDML" per il controllore utilizzato. Quindi
è possibile configurare la comunicazione.
Procedura
Per caricare il GSDML del convertitore, procedere nel modo seguente:
Caricare il GSDML del convertitore nel PROFINET-Controller, ossia nel controllore utilizzato.
Vi sono due modi per caricare il GSDML del convertitore:
● Il GSDML del convertitore SINAMICS si trova in Internet
(http://support.automation.siemens.com/WW/view/fr/22339653/133100).
● Il GSDML è memorizzato nel convertitore. Se si inserisce una scheda di memoria nel
convertitore e si imposta p0804 = 12 , ilGSDML viene salvato nella directory come file
compresso (PNGSD.ZIP) nella directory /SIEMENS/SINAMICS/DATA/CFG della scheda
di memoria.
Scompattare il GSDML prima di utilizzare il file di apparecchio.
Il GSDML del convertitore è stato caricato.
7.1.4
Selezione del telegramma - Procedura
Presupposto
Nella messa in servizio di base è stata selezionata un'impostazione con bus di campo.
Vedere anche la sezione: Messa in servizio di base (Pagina 76).
Procedura
Per impostare un telegramma specifico nel convertitore, procedere nel modo seguente:
Con STARTER o mediante un Operator Panel, impostare il parametro p0922 al valore
corrispondente.
Nel convertitore è stato impostato un telegramma specifico.
Sono disponibili i seguenti telegrammi:
Parametri
Descrizione
p0015
Macro apparecchio di azionamento
Configurazione dell'interfaccia nella messa in servizio di base e selezione del
telegramma.
p0922
PROFIdrive Selezione telegrammi
Impostazione dei telegrammi di ricezione e di invio, vedere anche Comunicazione
ciclica (Pagina 111)
1:
20:
350:
352
353:
354:
999:
Telegramma standard 1, PZD-2/2 (impostazione di fabbrica)
Telegramma standard 20, PZD-2/6
Telegramma SIEMENS 350, PZD-4/4
Telegramma SIEMENS 352, PZD-6/6
Telegramma SIEMENS 353, PZD-2/2, PKW-4/4
Telegramma SIEMENS 354, PZD-6/6, PKW-4/4
Ampliamento dei telegrammi e modifica dell'interconnessione dei segnali
(Pagina 118)
Convertitori con le Control Unit CU240B-2 e CU240E-2
106
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.2 Comunicazione tramite PROFIBUS
7.1.5
Attivazione della diagnostica tramite il controllore
Il convertitore offre la funzionalità che consente di trasmettere al controllore sovraordinato
messaggi di anomalia e di avvertenza (segnalazioni di diagnostica) in base alle classi di
errore PROFIdrive.
La funzionalità deve essere selezionata nel controllore sovraordinato (vedere l'esempio per
STEP 7 (Pagina 383)) e attivata avviandolo.
7.2
Comunicazione tramite PROFIBUS
7.2.1
Cosa occorre per la comunicazione tramite PROFIBUS?
Verificare le impostazioni di configurazione in base alla seguente tabella. Se è possibile
rispondere "Sì" ai quesiti significa che le impostazioni di configurazione sono state definite
correttamente ed è possibile controllare il convertitore tramite il bus di campo.
Quesiti
Descrizione
Esempi
Il convertitore è collegato
correttamente a PROFIBUS?
Vedere la sezione: Collegamento del
convertitore su PROFIBUS
(Pagina 108).
---
La comunicazione tra
convertitore e controllore
sovraordinato è stata
configurata?
Vedere la sezione: Configurazione della
comunicazione con il controllore
(Pagina 109)
Gli indirizzi nel convertitore e
nel controllore sovraordinato
corrispondono?
Vedere la sezione: Impostazione degli
indirizzi (Pagina 109).
Vedere anche la
sezione: Configurazione
della comunicazione
PROFIBUS in STEP 7
(Pagina 376).
Nel controllore sovraordinato e
nel convertitore è impostato lo
stesso telegramma?
Adattare il telegramma nel convertitore.
Vedere la sezione: Selezione del
telegramma - Procedura (Pagina 110).
I segnali che convertitore e
controllore scambiano tramite
PROFIBUS sono interconnessi
correttamente?
Adattare al convertitore
l'interconnessione dei segnali nel
controllore. Per l'interconnessione
conforme a PROFIdrive nel convertitore
vedere la sezione: Profilo PROFIdrive
per PROFIBUS e PROFINET
(Pagina 111).
Vedere anche la
sezione: Esempi di
programma STEP 7
(Pagina 384).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
107
Configurazione del bus di campo
7.2 Comunicazione tramite PROFIBUS
7.2.2
Collegamento del convertitore su PROFIBUS
Lunghezza dei cavi ammessa, posa e schermatura del cavo PROFIBUS
Con una velocità di trasmissione di 1 Mbit/s la lunghezza massima dei cavi è 100 m.
Ulteriori informazioni sono disponibili in Internet:
● Supporto prodotto (http://support.automation.siemens.com/WW/view/it/1971286)
● Guida all'installazione PNO (http://www.profibus.com/downloads/installation-guide/)
Connettori PROFIBUS consigliati
Per il collegamento del cavo PROFIBUS si consiglia di impiegare connettori con i seguenti
numeri di ordinazione:
● 6GK1500-0FC00
● 6GK1500-0EA02
Assegnazione dei connettori sul convertitore
Per l'assegnazione del connettore nel convertitore vedere la sezione: Interfacce, connettori,
interruttori, morsettiere e LED della CU (Pagina 51).
Comunicazione con il controllore anche con il Power Module scollegato dalla tensione di rete
Se la comunicazione con il controllore deve restare attiva quando viene disinserita la
tensione di rete, è necessario alimentare la Control Unit con DC 24 V tramite i morsetti 31 e
32.
In caso di brevi interruzioni della tensione di alimentazione a 24 V è possibile che il
convertitore segnali l'anomalia senza che venga interrotta la comunicazione con il
controllore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
108
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.2 Comunicazione tramite PROFIBUS
7.2.3
Configurazione della comunicazione con il controllore
Per poter configurare la comunicazione tra convertitore e controllore occorre in genere il file
di descrizione GSD del convertitore.
Se sono stati installati STEP 7 e STARTER, il file GSD non è necessario.
Procedura
Per configurare la comunicazione con il controllore con il GSD, procedere come segue:
1. Procurarsi il file di descrizione GSD del convertitore.
Vi sono due possibilità:
– Il GSD del convertitore SINAMICS si trova in Internet
(http://support.automation.siemens.com/WW/view/fr/22339653/133100).
– Il GSD è memorizzato nel convertitore. Se si inserisce una scheda di memoria nel
convertitore e si imposta p0804 = 12 , il convertitore scrive il GSD nella directory
/SIEMENS/SINAMICS/DATA/CFG sulla scheda di memoria.
2. Importare il file GSD nel tool di progettazione del controllore.
3. Configurare la comunicazione tra controllore e convertitore nel controllore utilizzato.
Vedere anche la sezione: Configurazione della comunicazione PROFIBUS in STEP 7
(Pagina 376).
La comunicazione con il controllore è configurata.
7.2.4
Impostazione degli indirizzi
L'indirizzo PROFIBUS del convertitore si imposta
tramite lo switch indirizzi sulla Control Unit, tramite
il parametro p0918 o in STARTER.
Con il parametro p0918 (impostazione di fabbrica:
126) oppure tramite STARTER, l'indirizzo può
essere impostato solo se tutti gli switch indirizzi si
trovano su "OFF" (0) o su "ON" (1).
Se è stato impostato un indirizzo valido tramite il
relativo switch, questo indirizzo resta sempre attivo
e il parametro p0918 non può essere modificato.
Campo indirizzi valido: 1 … 125
La posizione dello switch indirizzi è descritta nella
sezione: Interfacce, connettori, interruttori,
morsettiere e LED della CU (Pagina 51).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
109
Configurazione del bus di campo
7.2 Comunicazione tramite PROFIBUS
Procedura
Per modificare l'indirizzo del bus, procedere nel seguente modo:
1. Impostare l'indirizzo in uno dei modi descritti:
– tramite lo switch indirizzi
– con un Operator Panel tramite p0918
– in STARTER tramite le maschere "Control Unit/Comunicazione/Bus di campo" o
tramite la Lista esperti con p0918
2. Disinserire la tensione di alimentazione del convertitore, compresa l'alimentazione a 24 V
se presente,
per la Control Unit.
3. Reinserire le tensioni una volta che tutti i LED sul convertitore sono spenti.
L'indirizzo del bus è stato modificato.
7.2.5
Selezione del telegramma - Procedura
Presupposto
Nella messa in servizio di base è stata selezionata un'impostazione con bus di campo.
Vedere anche la sezione: Messa in servizio di base (Pagina 76).
Procedura
Per impostare un telegramma specifico nel convertitore, procedere nel modo seguente:
Con STARTER o mediante un Operator Panel, impostare il parametro p0922 al valore
corrispondente.
Nel convertitore è stato impostato un telegramma specifico.
Sono disponibili i seguenti telegrammi:
Parametri
Descrizione
p0015
Macro apparecchio di azionamento
Configurazione dell'interfaccia nella messa in servizio di base e selezione del
telegramma.
p0922
PROFIdrive Selezione telegrammi
Impostazione dei telegrammi di ricezione e di invio, vedere anche Comunicazione
ciclica (Pagina 111)
1:
20:
350:
352
353:
354:
999:
Telegramma standard 1, PZD-2/2 (impostazione di fabbrica)
Telegramma standard 20, PZD-2/6
Telegramma SIEMENS 350, PZD-4/4
Telegramma SIEMENS 352, PZD-6/6
Telegramma SIEMENS 353, PZD-2/2, PKW-4/4
Telegramma SIEMENS 354, PZD-6/6, PKW-4/4
Ampliamento dei telegrammi e modifica dell'interconnessione dei segnali
(Pagina 118)
Convertitori con le Control Unit CU240B-2 e CU240E-2
110
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
7.3
Profilo PROFIdrive per PROFIBUS e PROFINET
7.3.1
Comunicazione ciclica
I telegrammi di invio e ricezione del convertitore per la comunicazione ciclica sono strutturati
nel seguente modo:
Figura 7-2
Telegrammi per la comunicazione ciclica
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
111
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Tabella 7- 1 Spiegazione delle abbreviazioni
Abbreviazione
Spiegazione
Abbreviazione
Spiegazione
STW1
ZSW1
STW3
ZSW3
NSOLL_A
NIST_A_GLATT
IAIST_GLATT
Parola di comando 1
Parola di stato 1
Parola di comando 3
Parola di stato 3
Valore di riferimento del numero di giri
Valore attuale livellato del numero di giri
Valore attuale livellato di corrente
MIST_GLATT
PIST_GLATT
M_LIM
FAULT_CODE
WARN_CODE
MELD_NAMUR
Coppia attuale
Potenza attiva attuale
Valore limite della coppia
Numero di anomalia
Numero di avviso
Parola di anomalia secondo la
definizione VIK-NAMUR
Interconnessione dei dati di processo
Figura 7-3
Interconnessione delle parole di trasmissione
Convertitori con le Control Unit CU240B-2 e CU240E-2
112
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Figura 7-4
Interconnessione delle parole di ricezione
I telegrammi utilizzano, con l'eccezione del telegramma 999 (interconnessione libera), la
trasmissione parola per parola dei dati di invio e ricezione (r2050/p2051).
Se per l'applicazione utilizzata è necessario un telegramma individuale (ad es. trasmissione
di parole doppie), è possibile adattare uno dei telegrammi predefiniti tramite i parametri
p0922 e p2079. Per i dettagli vedere il Manuale delle liste, schemi logici 2420 e 2472.
7.3.1.1
Parole di comando e di stato 1
Le parole di comando e di stato soddisfano le specifiche per il profilo PROFIdrive, versione
4.1 per la modalità operativa "Regolazione di velocità".
Parola di comando 1 (STW1)
Parola di comando 1 (bit 0 ... 10 secondo il profilo PROFIdrive e VIK/NAMUR, bit 11 ... 15
specifici per il convertitore).
Bit
Significato
Spiegazione
Interconnessio
ne dei segnali
nel convertitore
0 = OFF1
Il motore frena seguendo la rampa di decelerazione p1121
del generatore di rampa. Nello stato di fermo il convertitore
disinserisce il motore.
p0840[0] =
r2090.0
0 → 1 = EIN
Il convertitore passa allo stato "pronto al funzionamento". Se
inoltre il bit 3 = 1, il convertitore accende il motore.
0 = OFF2
Disinserzione immediata del motore, quindi il motore si
ferma per inerzia.
Telegramma 20
0
1
Tutti gli altri
telegrammi
p0844[0] =
r2090.1
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
113
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Bit
Significato
Telegramma 20
Spiegazione
Interconnessio
ne dei segnali
nel convertitore
Tutti gli altri
telegrammi
1 = Nessun OFF2
L'inserzione del motore (comando ON) è possibile.
0 = arresto rapido (OFF3)
Arresto rapido: il motore frena seguendo la rampa di
decelerazione OFF3 p1135 fino all'arresto.
1 = Nessun arresto rapido (OFF3)
L'inserzione del motore (comando ON) è possibile.
0 = Blocco funzionamento
Disinserzione immediata del motore (cancellazione impulsi).
1 = Abilitazione funzionamento
Inserzione del motore (abilitazione impulsi possibile).
0 = Blocco generatore di rampa
Il convertitore imposta subito l'uscita del generatore di rampa p1140[0] =
r2090.4
su 0.
1 = Nessun blocco generatore di
rampa
L’abilitazione del generatore di rampa è possibile.
0 = Stop generatore di rampa
L'uscita del generatore di rampa rimane sul valore attuale.
1 = Abilitazione generatore di
rampa
L'uscita del generatore di rampa segue il valore di
riferimento.
0 = Blocco valore di riferimento
Il convertitore frena il motore seguendo la rampa di
decelerazione p1121 del generatore di rampa.
1 = Abilitazione valore di
riferimento
Il motore accelera seguendo la rampa di accelerazione
p1120 fino al valore di riferimento.
7
0 → 1 = Conferma anomalie
Confermare l'anomalia. Se il comando ON è ancora
presente, il convertitore passa allo stato "Blocco inserzione".
p2103[0] =
r2090.7
8, 9
Riservato
10
0 = Nessun controllo da parte del
PLC
Il convertitore ignora i dati di processo dal bus di campo.
p0854[0] =
r2090.10
1 = Controllo da parte del PLC
Comando tramite bus di campo, il convertitore acquisisce i
dati di processo dal bus di campo.
2
3
4
5
6
11
---1)
12
Non utilizzato
13
p0848[0] =
r2090.2
p0852[0] =
r2090.3
p1141[0] =
r2090.5
p1142[0] =
r2090.6
0 = Inversione di Invertire il valore di riferimento nel convertitore.
direzione
p1113[0] =
r2090.11
---1)
1 = MOP più
alto
Aumentare il valore di riferimento memorizzato nel
potenziometro motore.
p1035[0] =
r2090.13
14
---1)
1 = MOP più
basso
Diminuire il valore di riferimento memorizzato nel
potenziometro motore.
p1036[0] =
r2090.14
15
CDS bit 0
Riservato
Commutazione tra impostazioni per diverse interfacce
operative (set di dati di comando).
p0810 =
r2090.15
1)
Se si passa da un altro telegramma al telegramma 20, viene mantenuta l'impostazione del telegramma precedente.
Convertitori con le Control Unit CU240B-2 e CU240E-2
114
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Parola di stato 1 (ZSW1)
Parola di stato 1 (bit 0 ... 10 secondo il profilo PROFIdrive e VIK/NAMUR, bit 11 ... 15
specifici per il convertitore).
Bit Significato
Telegramma 20
Note
Interconnessio
ne dei segnali
nel convertitore
Tutti gli altri
telegrammi
0
1 = Pronto all'inserzione
L'alimentazione è inserita, l'elettronica è inizializzata, gli
impulsi sono bloccati.
p2080[0] =
r0899.0
1
1 = Pronto al funzionamento
Il motore è inserito (ON/OFF1 = 1), nessuna anomalia è
attiva. Con il comando "Abilitazione funzionamento"
(STW1.3) il convertitore avvia il motore.
p2080[1] =
r0899.1
2
1 = Funzionamento abilitato
Il motore segue il valore di riferimento. Vedere parola di
comando 1, bit 3.
p2080[2] =
r0899.2
3
1 = Anomalia attiva
Nel convertitore è presente un'anomalia. Tacitare
l'anomalia tramite STW1.7.
p2080[3] =
r2139.3
4
1 = OFF2 inattivo
L'arresto per inerzia non è attivo.
p2080[4] =
r0899.4
5
1 = OFF3 inattivo
L'arresto rapido non è attivo.
p2080[5] =
r0899.5
6
1 = Blocco inserzione attivo
L'inserzione del motore è possibile solo dopo un OFF1 e
un nuovo comando ON.
p2080[6] =
r0899.6
7
1 = Avviso attivo
Il motore resta acceso; nessuna conferma necessaria.
p2080[7] =
r2139.7
8
1 = Scarto di velocità all'interno del
campo di tolleranza
Scarto tra valore di riferimento e valore attuale all'interno
del campo di tolleranza.
p2080[8] =
r2197.7
9
1 = Controllo richiesto
Il controllore programmabile è sollecitato a prendere il
comando del convertitore.
p2080[9] =
r0899.9
10 1 = Numero di giri di confronto
raggiunto o superato
Il numero di giri è maggiore o uguale al numero di giri
massimo corrispondente.
p2080[10] =
r2199.1
11 0 = Limite I, M o P raggiunto
Il valore attuale di confronto per corrente, coppia o
potenza è raggiunto o superato.
p2080[11] =
r1407.7
12 ---1)
Segnale per l'apertura e la chiusura di un freno di
stazionamento motore.
p2080[12] =
r0899.12
13 0 = Avviso di surriscaldamento motore
--
p2080[13] =
r2135.14
14 1 = Il motore gira in avanti
Valore attuale interno al convertitore > 0.
p2080[14] =
r2197.3
1 = Freno
stazionamento
aperto
0 = Il motore gira indietro
15 1 =
Visualizzazione
CDS
1)
Valore attuale interno al convertitore < 0.
0 = Avviso di
sovraccarico termico
convertitore
p2080[15] =
r0836.0 /
r2135.15
Se si passa da un altro telegramma al telegramma 20, viene mantenuta l'impostazione del telegramma precedente.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
115
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
7.3.1.2
Parole di comando e di stato 3
Le parole di comando e di stato soddisfano le specifiche per il profilo PROFIdrive, versione
4.1 per la modalità operativa "Regolazione di velocità".
Parola di comando 3 (STW3)
La parola di comando 3 ha la seguente impostazione standard. L'interconnessione del
segnale può essere modificata.
Bit Valo
re
Significato
Spiegazione
Interconnessione dei
segnali nel
convertitore 1)
0
1
Valore di riferimento fisso bit 0
Selezione di max. 16 valori di riferimento
fissi diversi.
p1020[0] = r2093.0
1
1
Valore di riferimento fisso bit 1
2
1
Valore di riferimento fisso bit 2
p1022[0] = r2093.2
3
1
Valore di riferimento fisso bit 3
p1023[0] = r2093.3
4
1
Selezione DDS bit 0
5
1
Selezione DDS bit 1
6
–
Non utilizzato
7
–
Non utilizzato
8
1
9
1
Telegramma 350
p1021[0] = r2093.1
Commutazione tra impostazioni per
diversi motori (set di dati di azionamento).
p0820 = r2093.4
Regolatore PID, abilitazione
--
p2200[0] = r2093.8
Abilitazione frenatura in corrente continua
--
p1230[0] = r2093.9
p0821 = r2093.5
10 –
Non utilizzato
11 1
1 = abilitazione della statica
Abilitazione o blocco della statica del
regolatore di velocità.
p1492[0] = r2093.11
12 1
Regolazione coppia attiva
p1501[0] = r2093.12
Regolazione del numero di giri attiva
Commutazione del tipo di regolazione in
caso di regolazione vettoriale.
Nessuna anomalia esterna
--
p2106[0] = r2093.13
Commutazione tra impostazioni per
diverse interfacce operative (set di dati di
comando).
p0811[0] = r2093.15
0
13 1
0
Anomalia esterna attiva (F07860)
14 –
Non utilizzato
15 1
CDS bit 1
1)
Se si esegue la commutazione dal telegramma 350 a un altro, il convertitore imposta tutte le interconnessioni p1020, …
a "0". Eccezione: p2106 = 1.
Convertitori con le Control Unit CU240B-2 e CU240E-2
116
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Parola di stato 3 (ZSW3)
La parola di stato 3 ha la seguente impostazione standard.
Bit Valo
re
Significato
Descrizione
Interconnessione dei
segnali nel
convertitore
0
1
Frenatura in corrente continua attiva
--
p2051[3] = r0053
1
1
|n_att| > p1226
Numero di giri attuale > riconoscimento di
fermo
2
1
|n_att| > p1080
Numero di giri attuale > numero di giri
minimo
3
1
i_att ≧ p2170
Corrente attuale ≥ valore di soglia
corrente
4
1
|n_att| > p2155
Numero di giri attuale > valore di soglia
numero di giri 2
5
1
|n_att| ≦ p2155
Numero di giri attuale < valore di soglia
numero di giri 2
6
1
|n_att| ≧ r1119
Valore di riferimento del numero di giri
raggiunto
7
1
Tensione del circuito intermedio ≦ p2172
Tensione del circuito intermedio attuale ≦
valore di soglia
8
1
Tensione del circuito intermedio > p2172
Tensione del circuito intermedio attuale >
valore di soglia
9
1
Accelerazione o decelerazione conclusa
Generatore di rampa non attivo
10 1
Uscita regolatore PID al limite inferiore
Uscita regolatore PID ≦ p2292
11 1
Uscita regolatore PID al limite superiore
Uscita regolatore PID > p2291
12
Non utilizzato
13
Non utilizzato
14
Non utilizzato
15
Non utilizzato
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
117
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
7.3.1.3
Ampliamento dei telegrammi e modifica dell'interconnessione dei segnali
Se è stato selezionato un telegramma, il convertitore interconnette i segnali corrispondenti
con l'interfaccia del bus di campo. Queste interconnessioni sono normalmente protette
contro le modifiche. È possibile modificarle con un'opportuna impostazione nel convertitore.
Ampliamento telegramma
Ogni telegramma può essere ampliato se vengono associati segnali aggiuntivi.
Procedura
Per ampliare un telegramma, procedere nel seguente modo:
1. Con STARTER o mediante un Operator Panel, impostare il parametro p0922 = 999.
2. Impostare il parametro p2079 al valore corrispondente del telegramma corrispondente.
3. Interconnettere le altre parole di trasmissione PZD e di ricezione PZD tramite i parametri
r2050 e p2051 con segnali liberamente scelti.
Il telegramma è stato ampliato.
Parametri
Descrizione
p0922
Selezione del telegramma PROFIdrive
999:
p2079
Selezione telegramma avanzata dati di processo (PZD) PROFIdrive
1:
20:
350:
352:
353:
354:
r2050[0…11]
Progettazione libera del telegramma
Telegramma standard 1, PZD-2/2
Telegramma standard 20, PZD-2/6
Telegramma SIEMENS 350, PZD-4/4
Telegramma SIEMENS 352, PZD-6/6
Telegramma SIEMENS 353, PZD-2/2, PKW-4/4
Telegramma SIEMENS 354, PZD-6/6, PKW-4/4
PROFIdrive PZD ricezione parola
Uscita connettore per l'interconnessione del PZD ricevuto dal controller PROFIdrive
(valori di riferimento) con formato parola.
p2051[0…11] PROFIdrive PZD invio parola
Selezione dei PZD da inviare al controller PROFIdrive (valori attuali) con formato
parola.
Selezione dei PZD da inviare al controller PROFIdrive (valori attuali) con formato parola. Per
maggiori informazioni vedere il Manuale delle liste, schemi logici 2468 e 2470.
Convertitori con le Control Unit CU240B-2 e CU240E-2
118
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Selezione dell'interconnessione dei segnali del telegramma
I segnali del telegramma possono essere interconnessi liberamente.
Procedura
Per modificare l'interconnessione dei segnali di un telegramma, procedere nel seguente
modo:
1. Con STARTER o mediante un Operator Panel, impostare il parametro p0922 = 999.
2. Con STARTER o mediante un Operator Panel, impostare il parametro p2079 = 999.
3. Interconnettere le altre parole di trasmissione PZD e di ricezione PZD tramite i parametri
r2050 e p2051 con segnali liberamente scelti.
I segnali trasmessi nel telegramma sono stati interconnessi liberamente.
Parametri
Descrizione
p0922
Selezione del telegramma PROFIdrive
999:
p2079
Selezione telegramma avanzata dati di processo (PZD) PROFIdrive
999:
r2050[0…11]
Progettazione libera del telegramma
Progettazione libera del telegramma
PROFIdrive PZD ricezione parola
Uscita connettore per l'interconnessione del PZD ricevuto dal controller PROFIdrive
(valori di riferimento) con formato parola.
p2051[0…11] PROFIdrive PZD invio parola
Selezione dei PZD da inviare al controller PROFIdrive (valori attuali) con formato
parola.
Per maggiori informazioni vedere il Manuale delle liste, schemi logici 2468 e 2470.
7.3.1.4
Struttura dati del canale parametri
Struttura del canale parametri
Il canale parametri comprende quattro parole. Nella 1ª e nella 2ª parola vengono trasferiti il
numero del parametro, l'indice e il tipo di job (lettura o scrittura). La 3ª e la 4ª parola sono
riservate ai contenuti dei parametri. I contenuti dei parametri possono essere valori a 16 bit
(ad es. baud rate) o a 32 bit (ad es. parametri CO).
Il bit 11 nella 1ª parola è riservato ed è sempre occupato con 0.
Esempi di telegramma sono riportati al termine di questa sezione.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
119
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Codice di richiesta e codice di risposta
I bit 12 … 15 della 1ª parola del canale dei parametri contengono il codice di richiesta e il
codice di risposta. I codici possibili e le ulteriori spiegazioni sono riportate nelle seguenti
tabelle.
Panoramica dei codici di richiesta controllore → convertitore
Codice di
richiesta
Descrizione
Codice di risposta
0
Nessuna richiesta
0
7/8
1
Richiesta valore del parametro
1/2
7/8
2
Modifica valore del parametro (parola)
1
7/8
3
Modifica valore del parametro (parola doppia)
2
7/8
4
Richiesta elemento descrittivo
3
7/8
62)
Richiesta valore del parametro (campo)
4/5
7/8
72)
Modifica valore del parametro (campo, parola) 1)
4
7/8
82)
Modifica valore del parametro (campo, parola doppia)
5
7/8
9
Richiesta numero di elementi di campo
6
7/8
positivo
1)
1)
1)
L'elemento desiderato del parametro è specificato in IND (2ª parola).
2)
I seguenti codici di richiesta sono identici: 1 ≡ 6, 2 ≡ 7 3 ≡ 8.
Si consiglia di utilizzare i codici 6, 7 e 8.
1)
negativo
Panoramica dei codici di richiesta convertitore → controllore
Il codice di risposta dipende dal codice di richiesta.
Codice di
risposta
Descrizione
0
Nessuna risposta
1
Trasmissione valore parametro (parola)
2
Trasmissione valore parametro (parola doppia)
3
Trasmissione elemento descrittivo 1)
4
Trasmissione valore parametro (campo, parola) 2)
5
Trasmissione valore parametro (campo, parola doppia) 2)
6
Trasmissione numero di elementi di campo
7
Il convertitore non può elaborare la richiesta (con numero di errore)
8
Nessuno stato del controllore master/Nessuna autorizzazione alla modifica di
parametri dell'interfaccia del canale parametri
1) L'elemento desiderato del parametro è specificato in IND (2ª parola).
2) L'elemento desiderato del parametro indicizzato è specificato in IND (2ª parola).
Convertitori con le Control Unit CU240B-2 e CU240E-2
120
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Panoramica dei numeri di errore con codice di risposta 7 (il convertitore non può elaborare la
richiesta)
Con il codice di risposta 7, il convertitore invia al controllore uno dei seguenti numeri di
errore nella parola più alta del canale parametri.
N.
Descrizione
00 hex
Numero parametro non ammesso (accesso a parametri non disponibili)
01 hex
Valore parametro non modificabile (job di modifica per un valore parametro non
modificabile)
02 hex
Limite inferiore o superiore valore superato (job di modifica con valore al di fuori dei limiti
ammessi.
03 hex
Sottoindice errato (accesso a un sottoindice non disponibile).
04 hex
Nessun array (accesso con un sottoindice a un parametro non indicizzato)
05 hex
Tipo dati errato (job di modifica con valore non adatto al tipo di dati del parametro)
06 hex
Impostazione non ammessa, consentito solo l'azzeramento (job di modifica con valore
diverso da 0 senza autorizzazione).
07 hex
Elemento descrittivo non modificabile (job di modifica a elemento descrittivo non
modificabile.valore di errore)
0B hex
Nessuna priorità di comando (job di modifica in assenza di priorità di comando, vedere
anche p0927)
0C hex
Parola chiave mancante
11 hex
Job non eseguibile a causa dello stato operativo (accesso impossibile per motivi
temporanei non meglio specificati)
14 hex
Valore non consentito (job di modifica con un valore che rientra nei limiti dei valori, ma che
non è ammesso per altri motivi permanenti, ovvero un parametro con valori singoli
definiti).
65 hex
Numero del parametro attualmente disattivato (a seconda dello stato operativo del
convertitore)
66 hex
Larghezza del canale insufficiente (canale di comunicazione troppo piccolo per la risposta)
68 hex
Valore del parametro non consentito (il parametro ammette solo determinati valori)
6A hex
Richiesta non contenuta/Task non supportato (i codici di richiesta validi sono riportati nella
tabella "Codici di richiesta controllore → convertitore")
6B hex
Nessun accesso in modifica con regolatore abilitato. (lo stato operativo del convertitore
impedisce la modifica dei parametri)
86 hex
Accesso in scrittura solo alla messa in servizio (p0010 = 15) (lo stato operativo del
convertitore impedisce la modifica dei parametri)
87 hex
Protezione know-how attiva, accesso bloccato
C8 hex
Job di modifica al di sotto del limite attualmente valido (job di modifica su un valore che
rientra nei limiti "assoluti", ma che si trova al di sotto del limite inferiore attualmente valido)
C9 hex
Job di modifica al di sopra del limite attualmente valido (esempio: un valore di parametro è
troppo alto per la potenza del convertitore).
CC hex
Job di modifica non consentito (modifica non ammessa perché la chiave di accesso non è
disponibile)
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
121
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Offset e indice pagine dei numeri dei parametri
Numeri parametri < 2000
PNU = numero parametro.
Scrivere il numero del parametro in PNU (PKE, bit 10 … 0).
Numeri parametri ≥ 2000
PNU = numero parametro - offset.
Scrivere il numero del parametro meno l'offset in PNU (PKE,
bit 10 … 0).
Scrivere l'offset nell'indice pagine (IND, bit 7 … 0).
Numero del
parametro
Offset
Indice pagine
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0000 … 1999
0
Hex
0 hex
0
0
0
0
0
0
0
0
2000 … 3999
2000
80 hex
1
0
0
0
0
0
0
0
6000 … 7999
6000
90 hex
1
0
0
1
0
0
0
0
8000 … 9999
8000
20 hex
0
0
1
0
0
0
0
0
10000 … 11999
10000
A0 hex
1
0
1
0
0
0
0
0
20000 … 21999
20000
50 hex
0
1
0
1
0
0
0
0
30000 … 31999
30000
F0 hex
1
1
1
1
0
0
0
0
60000 … 61999
60000
74 hex
0
1
1
1
0
1
0
0
Parametri indicizzati
Nei parametri indicizzati è necessario scrivere l'indice come valore esadecimale nel
sottoindice (IND, bit 15 … 8).
Contenuti dei parametri
I contenuti dei parametri possono essere valori dei parametri o parametri connettore. Per
l'interconnessione di parametri connettore vedere anche la sezione: Interconnessione dei
segnali nel convertitore (Pagina 372).
Immettere il valore del parametro allineato a destra nella 4ª parola del canale parametri,
come segue:
• Valori a 8 bit: 4. ª parola, bit 0 … 7,
I bit 8 … 15 della 4ª parola e della 3ª parola sono zero.
• Valori a 16 bit: 4. ª parola, bit 0 … 15,
La 3ª parola è zero.
• Valori a 32 bit: 3. ª e 4ª parola
Immettere un parametro connettore come segue:
3. ª parola
• Numero del parametro connettore:
• Drive Object del parametro connettore:
4. ª parola, bit 10 … 15
• Indice o numero di campo bit del
parametro connettore:
4. ª parola, bit 0 … 9
Convertitori con le Control Unit CU240B-2 e CU240E-2
122
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Esempi di telegramma
Richiesta di lettura: lettura del numero di serie del Power Module (p7841[2])
Per ottenere il valore del parametro indicizzato p7841 è necessario compilare il telegramma
del canale parametri con i seguenti dati:
● PKE, bit 12 … 15 (AK): = 6 (richiesta valore parametro (campo))
● PKE, bit 0 … 10 (PNU): = 1841 (numeri di parametro senza offset)
Numero di parametro = PNU + offset (indice pagine)
(7841 = 1841 + 6000)
● IND, bit 8 … 15 (sottoindice): = 2 (indice del parametro)
● IND, bit 0 … 7 (indice pagine): = 90 hex (offset 6000 ≙ 90 hex)
● Poiché si desidera leggere il valore del parametro, le parole 3 e 4 nel canale parametri
sono irrilevanti per la richiesta del valore del parametro e devono essere impostate ad es.
con il valore 0.
Figura 7-5
Telegramma per richiesta di lettura di p7841[2]
Job di scrittura: modifica della modalità di reinserzione (p1210)
Nell'impostazione di fabbrica la modalità di reinserzione è bloccata (p1210 = 0). Per attivare
la reinserzione automatica con "Tacitazione di tutte le anomalie e reinserzione con comando
ON" è necessario impostare p1210 = 26:
● PKE, bit 12 … 15 (AK): = 7 (modifica valore parametro (campo, parola))
● PKE, bit 0 … 10 (PNU): = 4BA hex (1210 = 4BA hex, nessun offset poiché 1210 < 1999)
● IND, bit 8 … 15 (sottoindice): = 0 hex (parametro non indicizzato)
● IND, bit 0 … 7 (indice pagine): = 0 hex (offset 0 corrisponde a 0 hex)
● PWE1, bit 0 … 15: = 0 hex
● PWE2, bit 0 … 15: = 1A hex (26 = 1A hex)
Figura 7-6
Telegramma per attivare la reinserzione automatica con p1210 = 26
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
123
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Job di scrittura: assegnazione dell'ingresso digitale 2 con la funzione ON/OFF1
(p0840[1] = 722.2)
Per collegare l'ingresso digitale 2 con OFF1/ON, è necessario assegnare al parametro
p0840[1] (sorgente ON/OFF1) il valore 722.2 (DI 2). A tale scopo il telegramma del canale
parametri deve essere compilato come segue:
● PKE, bit 12 … 15 (AK): = 7 hex (modifica valore parametro (campo, parola))
● PKE, bit 0 … 10 (PNU): = 348 hex (840 = 348 hex, nessun offset poiché 840 < 1999)
● IND, bit 8 … 15 (sottoindice): = 1 hex (CDS1 = indice1)
● IND, bit 0 … 7 (indice pagine): = 0 hex (offset 0 ≙ 0 hex)
● PWE1, bit 0 … 15: = 2D2 hex (722 = 2D2 hex)
● PWE2, bit 10 … 15: = 3f hex (Drive Object - in SINAMICS G120 sempre 63 = 3f hex)
● PWE2, bit 0 … 9: = 2 hex (indice del parametro (DI 2 = 2))
Figura 7-7
Telegramma per assegnare ON/OFF1 a DI 2
Altri esempi applicativi
Vedere anche: Scrittura e lettura dei parametri tramite PROFIBUS
(http://support.automation.siemens.com/WW/view/en/8894584).
7.3.1.5
Traffico trasversale
La "comunicazione diretta" è anche definita "comunicazione slave-slave" o "Data Exchange
Broadcast". Con questa funzione, gli slave scambiano dati senza la partecipazione diretta
del master.
Esempio: un convertitore utilizza il valore attuale del numero di giri di un altro convertitore
come proprio valore di riferimento del numero di giri.
Definizioni
● Publisher: slave che invia i dati per la comunicazione diretta.
● Subscriber: slave che riceve i dati della comunicazione diretta dal Publisher.
● Link e accessi definiscono i dati che vengono utilizzati per la comunicazione diretta.
Limitazioni
● Nella versione attuale del firmware, la comunicazione diretta è possibile solo per i
convertitori con comunicazione PROFIBUS.
● per ogni azionamento sono ammessi al massimo 12 PZD
● per un Publisher sono possibili al massimo 4 link
Convertitori con le Control Unit CU240B-2 e CU240E-2
124
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Procedura
Per configurare la comunicazione diretta, procedere nel seguente modo:
1. Definire nel controllore:
– Quale convertitore funziona come Publisher (emettitore) o Subscriber (ricevitore)?
– Quali dati o campi di dati (accessi) vengono utilizzati per la comunicazione diretta?
2. Definire nel convertitore:
Come elabora il Subscriber i dati trasferiti nella comunicazione diretta?
La comunicazione diretta è stata configurata.
Vedere anche la sezione: Configurazione del traffico trasversale in STEP 7 (Pagina 391).
7.3.2
Comunicazione aciclica
Attraverso PROFIBUS e PROFINET è possibile comunicare con il convertitore sia in modo
ciclico che in modo aciclico.
Il convertitore supporta i seguenti tipi di comunicazione aciclica:
● Lettura e scrittura dei parametri tramite il "set di dati 47" (fino a 240 byte per job di
scrittura o di lettura)
● Lettura dei parametri specifici del profilo
● Scambio di dati con un pannello SIMATIC (Human Machine Interface o interfaccia uomomacchina)
Un esempio di programma STEP-7 per la trasmissione dati aciclica è descritto nella sezione
Esempio di programma STEP 7 per la comunicazione aciclica (Pagina 387).
Lettura di valori dei parametri
Tabella 7- 2 Job per la lettura di parametri
Blocco dati
Byte n
Byte n + 1
n
Header
Riferimento01 hex ... FF hex
01 hex: job di lettura
0
01 hex
Numero dei parametri (m) 01 hex ... 27 hex
2
Attributo
10 hex: valore del parametro
20 hex: Descrizione del parametro
Numero degli indici
4
Indirizzo del parametro 1
00 hex ... EA hex
(per i parametri senza indice: 00 hex)
Numero del parametro0001 hex ... FFFF hex
6
Numero del 1° indice 0000 hex ... FFFF hex
(per i parametri senza indice: 0000 hex)
8
…
…
…
…
…
…
…
Indirizzo del parametro m
…
…
Indirizzo del parametro 2
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
125
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Tabella 7- 3 Risposta del convertitore a un job di lettura
Blocco dati
Byte n
Byte n + 1
n
Header
Riferimento (identico al job di lettura)
01 hex: il convertitore ha eseguito il job di
lettura.
81 hex: il convertitore non ha potuto
completare il job di lettura.
0
01 hex
Numero dei parametri (m)
(identico al job di lettura)
2
Formato
02 hex: Integer8
03 hex: Integer16
04 hex: Integer32
05 hex: Unsigned8
06 hex: Unsigned16
07 hex: Unsigned32
08 hex: FloatingPoint
10 hex OctetString
13 hex TimeDifference
41 hex: Byte
42 hex: Word
43 hex: Double word
44 hex: Error
Numero dei valori degli indici o, in caso di
risposta negativa, Numero dei valori di errore
4
Valori del parametro 1
Valore del 1° indice o, in caso di risposta negativa, valore di errore 1
I valori di errore sono riportati nella tabella che si trova alla fine di questa sezione.
6
…
…
Valori del parametro 2
…
…
…
Valori del parametro m
…
Convertitori con le Control Unit CU240B-2 e CU240E-2
126
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Modifica dei valori dei parametri
Tabella 7- 4 Job per la modifica di parametri
Blocco dati
Byte n
Byte n + 1
n
Header
Riferimento01 hex ... FF hex
02 hex: job di modifica
0
01 hex
Numero dei parametri (m) 01 hex ... 27 hex
2
10 hex: valore del parametro
Numero degli indici
4
Indirizzo del parametro 1
00 hex ... EA hex
(00 hex e 01 hex hanno lo stesso significato)
Numero del parametro0001 hex ... FFFF hex
6
Numero del 1° indice0001 hex ... FFFF hex
8
…
…
Indirizzo del parametro 2
…
…
…
Indirizzo del parametro m
…
Valori del parametro 1
Formato
02 hex: Integer 8
03 hex: Integer 16
04 hex: Integer 32
05 hex: Unsigned 8
06 hex: Unsigned 16
07 hex: Unsigned 32
08 hex: Floating Point
10 hex Octet String
13 hex Time Difference
41 hex: Byte
42 hex: Word
43 hex: Double word
…
Numero dei valori degli indici
00 hex ... EA hex
Valore del 1° indice
…
Valori del parametro 2
…
…
…
Valori del parametro m
…
Tabella 7- 5 Risposta, se il convertitore ha eseguito il job di modifica
Blocco dati
Byte n
Byte n + 1
n
Header
Riferimento (identico al job di modifica)
02 hex
0
01 hex
Numero di parametri(identico al job di
modifica)
2
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
127
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Tabella 7- 6 Risposta, se il convertitore non ha completato il job di modifica
Blocco dati
Byte n
Byte n + 1
n
Header
Riferimento (identico al job di modifica)
82 hex
0
01 hex
Numero di parametri(identico al job di
modifica)
2
Formato
40 hex: Zero (job di modifica per questo
blocco dati eseguito)
44 hex: Error (job di modifica per questo
blocco dati non eseguito)
Numero di valori di errore
00 hex o 02 hex
4
Valori del parametro 1
Solo per "Error" - valore di errore 1
I valori di errore sono riportati nella tabella che si trova alla fine di questa sezione.
6
Solo per "Error" - valore di errore 2
Il valore di errore 2 è zero oppure contiene il numero del primo indice nel quale si è
verificato l'errore.
8
Valori del parametro 2
...
...
…
Valori del parametro m
...
…
Tabella 7- 7 Valori di errore nella risposta parametri
Valore di Significato
errore 1
00 hex
Numero parametro non ammesso (accesso a parametri non disponibili)
01 hex
Valore parametro non modificabile (job di modifica per un valore parametro non modificabile)
02 hex
Limite inferiore o superiore valore superato (job di modifica con valore al di fuori dei limiti ammessi)
03 hex
Sottoindice errato (accesso a un indice del parametro non disponibile)
04 hex
Nessun array (accesso con un sottoindice a un parametro non indicizzato)
05 hex
Tipo dati errato (job di modifica con valore non adatto al tipo di dati del parametro)
06 hex
Impostazione non ammessa, consentito solo l'azzeramento (job di modifica con valore diverso da 0 senza
autorizzazione)
07 hex
Elemento descrittivo non modificabile (job di modifica a elemento descrittivo non modificabile)
09 hex
Dati descrittivi non presenti (accesso a descrizione non presente, valore parametro presente)
0B hex
Nessuna priorità operativa (job di modifica in assenza di priorità operativa)
0F hex
Nessun array di testo disponibile (il valore parametro è disponibile, ma il job accede a un array di testo non
disponibile)
11 hex
Job non eseguibile a causa dello stato operativo (accesso impossibile per motivi temporanei non meglio
specificati)
14 hex
Valore non consentito (job di modifica con un valore che rientra nei limiti dei valori, ma che non è ammesso per
altri motivi permanenti, ovvero un parametro con valori singoli definiti)
15 hex
Risposta troppo lunga (la lunghezza della risposta attuale supera la lunghezza massima trasmissibile)
16 hex
Indirizzo di parametro non consentito (valore non consentito o non supportato per attributo, numero di elementi,
17 hex
Formato non consentito (job di modifica per formato non consentito o non supportato)
18 hex
Numero di valori non coerente (il numero di valori dei dati dei parametri non coincide con il numero di elementi
numero di parametro o sottoindice, oppure per una combinazione di questi)
nell'indirizzo dei parametri)
Convertitori con le Control Unit CU240B-2 e CU240E-2
128
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.3 Profilo PROFIdrive per PROFIBUS e PROFINET
Valore di Significato
errore 1
19 hex
L'oggetto di azionamento non esiste (accesso a un oggetto di azionamento inesistente)
6B hex
Nessun accesso in modifica con regolatore abilitato.
6C hex
Unità sconosciuta.
6E hex
Il job di modifica è possibile solo nella messa in servizio del motore (p0010 = 3).
6F hex
Il job di modifica è possibile solo nella messa in servizio della parte di potenza (p0010 = 2).
70 hex
Il job di modifica è possibile solo nella messa in servizio rapida (messa in servizio di base) (p0010 = 1).
71 hex
Il job di modifica è possibile solo se il convertitore è pronto per il funzionamento (p0010 = 0).
72 hex
Il job di modifica è possibile solo con il reset parametri (ripristino alle impostazioni di fabbrica) (p0010 = 30).
73 hex
Il job di modifica è possibile solo nella messa in servizio delle funzioni di sicurezza (p0010 = 95).
74 hex
Il job di modifica è possibile solo nella messa in servizio dell'applicazione/unità tecnologica (p0010 = 5).
75 hex
Il job di modifica è possibile solo in uno stato di messa in servizio (p0010 ≠ 0).
76 hex
Il job di modifica non è possibile a causa di motivi interni (p0010 = 29).
77 hex
Il job di modifica non può essere eseguito durante il download.
81 hex
Il job di modifica non può essere eseguito durante il download.
82 hex
L'assunzione della priorità di comando è bloccata con BI:p0806.
83 hex
L'interconnessione desiderata è impossibile (l'uscita connettore non fornisce il valore Float, ma l'ingresso
connettore richiede un valore Float)
84 hex
Il convertitore non accetta nessun job di modifica (il convertitore è occupato con calcoli interni. Vedere il
parametro r3996 nel Manuale delle liste del convertitore. Vedere anche la sezione: Ulteriori informazioni sul
convertitore (Pagina 397))
85 hex
Nessun metodo di accesso definito.
86 hex
Accesso in scrittura solo alla messa in servizio dei set di dati (p0010 = 15) (lo stato operativo del convertitore
impedisce la modifica dei parametri)
87 hex
Protezione know-how attiva, accesso bloccato
C8 hex
Job di modifica al di sotto del limite attualmente valido (job di modifica su un valore che rientra nei limiti
"assoluti", ma che si trova al di sotto del limite inferiore attualmente valido)
C9 hex
Job di modifica al di sopra del limite attualmente valido (esempio: un valore di parametro è troppo alto per la
potenza del convertitore).
CC hex
Job di modifica non consentito (modifica non ammessa perché la chiave di accesso non è disponibile)
Altri esempi applicativi
Vedere anche: Scrittura e lettura ciclica dei parametri
(http://support.automation.siemens.com/WW/view/it/29157692).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
129
Configurazione del bus di campo
7.4 Profilo PROFIenergy tramite PROFINET
7.4
Profilo PROFIenergy tramite PROFINET
7.4.1
PROFIenergy
Il profilo PROFIenergy indipendente dal costruttore offre le seguenti funzioni:
● Disinserzione di impianti o di parti degli impianti durante le pause di funzionamento
● Monitoraggio del flusso di energia
● Segnalazione dello stato dell'impianto
Funzioni PROFIenergy del convertitore
Il controllore sovraordinato trasferisce i comandi al convertitore nel funzionamento aciclico.
Per il controllore sono disponibili i seguenti comandi e query:
Comandi di controllo
● Start_Pause
Segnale per l'inizio e la durata di una pausa
● End_Pause
Segnale per il ritorno allo stato produttivo
Query di stato
● PEM_Status
Stato attuale dell'apparecchio: modo risparmio energetico o stato produttivo
● Query_Measurement
Consumo di energia
Impostazioni di base nel convertitore
Il parametro p5611 definisce le reazioni al comando PROFIenergy "Start_Pause".
Abilitazione PROFIenergy
p5611.0 = 0
sì
p5611.0 = 1
Con "Start_Pause", l'azionamento emette OFF 1
Passaggio al Modo risparmio energetico da S4
p5611.1= 0
p5611.1= 1
p5611.2 = 0
p5611.2 = 1
no
no
sì
no
sì
Convertitori con le Control Unit CU240B-2 e CU240E-2
130
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.4 Profilo PROFIenergy tramite PROFINET
Tabella 7- 8
Dipendenze delle impostazioni da p5611.0 … p5611.2
Bit 0
Bit 1
Bit 2
0
0
0
1
0/1
0/1
0
1
0
Modo risparmio energetico abilitato.
•
Visualizzazione in r5613
•
Nessun'altra reazione "automatica".
•
Impostazione delle reazioni ai comandi PROFIenergy sul lato convertitore.
Modo risparmio energetico non abilitato. Nessuna reazione ai comandi
PROFIenergy dal controllore
Modo risparmio energetico abilitato con le seguenti reazioni:
•
Visualizzazione in r5613
•
OFF1 viene emesso se il controllore emette il comando "Start_Pause".
–
Il comando diventa subito attivo negli stati "Blocco inserzione" (S1) o
"Pronto all'inserzione" (S2) del convertitore.
–
Nello stato "Funzionamento" (S4) OFF1 diventa attivo solo se il
convertitore è passato allo stato "Blocco inserzione" (S1) o Pronto
all'inserzione" (S2) in seguito ad altri comandi, sul lato controllo o sul
lato convertitore.
Finché è attivo il comando "Start_Pause" non è possibile inserire il
convertitore.
Con "End_Pause" il comando OFF1 viene annullato.
•
0
1
1
Modo risparmio energetico abilitato con le seguenti reazioni:
•
Visualizzazione in r5613
•
OFF1 viene emesso se il controllore emette il comando "Start_Pause".
Il comando diventa subito attivo negli stati "Blocco inserzione" (S1), "Pronto
all'inserzione" (S2), "Pronto al funzionamento" (S3) e Funzionamento (S4)
del convertitore.
•
Con il comando "End_Pause" gli impulsi vengono nuovamente abilitati e il
motore si avvia se è attivo lo stato "Pronto al funzionamento" (S3) o lo stato
"Funzionamento" (S4).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
131
Configurazione del bus di campo
7.4 Profilo PROFIenergy tramite PROFINET
Altre impostazioni e visualizzazioni
Impostazioni
● Tempo di pausa minimo: p5602
è il tempo richiesto dalla macchina per passare al modo di risparmio energetico quindi
ritornare al modo produttivo.
● Tempo di pausa minimo: p5606
● Sorgente del segnale per impostare il convertitore nello stato S1 (Blocco inserzione):
p5614
(ad es. p5614 = 722.0 significa che si imposta il convertitore tramite DI0 nello stato
"Blocco inserzione").
● Reset della visualizzazione del consumo di energia a 0: p0040
Visualizzazioni
Valore di visualizzazione
nel
convertitore
nel profilo PROFIenergy
Potenza erogata sull'albero motore
r0032 in kW
ID 34 in W
Fattore di potenza
r0038
ID166
Bilancio dell'energia assorbita e recuperata.
r0039[1], in
kWh
ID 200 in Wh
Visualizzazione interconnettibile dello stato
PROFIenergy
r5613
---
Consumo di energia risparmiato - rispetto alla
curva caratteristica impostabile (p3320 … p3329)
r0041
---
Convertitori con le Control Unit CU240B-2 e CU240E-2
132
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
7.5
Comunicazione tramite Ethernet/IP
Tramite Ethernet/IP è possibile impostare comandi e valori di riferimento, leggere
informazioni di stato e valori attuali, modificare i valori dei parametri e resettare gli errori.
I dati di processo (valori di riferimento, valori attuali, ecc.) vengono trasmessi in Ethernet/IP
tramite assemblies. Oltre agli assemblies esistono oggetti che consentono di impostare la
comunicazione. Gli oggetti e gli assemblies supportati dal convertitore sono descritti nella
sezione Oggetti supportati (Pagina 136)
7.5.1
Collegamento del convertitore a Ethernet/IP
Per il collegamento al controllore la Control Unit dispone di due connettori femmina RJ45
che consentono di realizzare una topologia di linea. Impiegando degli switch è possibile
realizzare tutte le topologie.
Si consiglia di utilizzare i seguenti connettori con il numero di ordinazione: 6GK1901-1BB102Ax0 per il collegamento del cavo Ethernet.
Le istruzioni per il montaggio di SIMATIC NET Industrial Ethernet FastConnect RF45 Plug
180 sono contenute nelle informazioni sul prodotto in Internet "Istruzioni di montaggio
SIMATIC NET Industrial Ethernet FastConnect RJ45 Plug
(http://support.automation.siemens.com/WW/view/en/37217116/133300)".
Procedura
Per collegare il convertitore al controllore tramite Ethernet, procedere nel modo seguente:
1. Collegare il convertitore al controllore tramite un cavo Ethernet.
2.
creare nel controllore un modulo I/O generico (Pagina 145) per lo scambio di dati ciclico
tra il controllore e il convertitore
oppure
caricare il file EDS di ODVA nel controllore. I dati necessari si trovano in Internet
all'indirizzo:
(http://www.odva.org/Home/CIPPRODUCTCOMPLIANCE/DeclarationsofConformity/Ethe
rNetIPDOCs/tabid/159/lng/en-US/Default.aspx) .
Si è collegato il convertitore al controllore tramite Ethernet/IP.
Vedere anche la sezione: Interfacce, connettori, interruttori, morsetti di comando e LED della
CU (Pagina 51).
Posa e schermatura del cavo Ethernet
Ulteriori informazioni in proposito si trovano in Internet: Ethernet/IP Guidelines
(http://www.odva.org/Home/ODVATECHNOLOGIES/EtherNetIP/EtherNetIPLibrary/tabid/76/l
ng/en-US/Default.aspx).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
133
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
Messa in servizio del convertitore in una rete Ethernet/IP
Per mettere in servizio il convertitore occorre accedere al convertitore stesso con STARTER
tramite l'interfaccia USB. A questo scopo collegare il computer al convertitore tramite
l'interfaccia USB. Vedere anche Messa in servizio di base con STARTER (Pagina 81).
7.5.2
Cosa occorre per la comunicazione tramite Ethernet/IP?
Verificare le impostazioni di comunicazione rispondendo alle seguenti domande. Se è
possibile rispondere "Sì" ai quesiti significa che le impostazioni di configurazione sono state
definite correttamente ed è possibile controllare il convertitore tramite il bus di campo.
● Il convertitore è collegato correttamente a Ethernet/IP?
● Il file EDS (Pagina 133) è installato nel controllore?
● L'interfaccia del bus e l'indirizzo IP sono impostati correttamente?
● I segnali che convertitore e controllore scambiano sono interconnessi correttamente?
7.5.3
Impostazioni di comunicazione per Ethernet/IP
Impostazioni di comunicazione generali
Per poter comunicare con il controllore sovraordinato tramite Ethernet/IP, occorre impostare
il parametro p2030 = 10.
Dopodiché vanno impostati i dati seguenti:
• Indirizzo IP
in p8921
valore valido attualmente in r8931
• Subnet Mask
in p8923
valore valido attualmente in r8933
• Default Gateway
in p8922
valore valido attualmente in r8932
• Name of Station
in p8920
valore valido attualmente in r8930
Quando è impostato p2030 = 10 questi parametri valgono per Ethernet/IP, anche se il nome
del parametro rimanda a PROFINET.
Gli indirizzi modificati diventano attivi solo se il convertitore ed eventualmente l'alimentatore
esterno da 24 V si disinseriscono e si reinseriscono.
Convertitori con le Control Unit CU240B-2 e CU240E-2
134
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
Altre impostazioni per la comunicazione tramite Ethernet/IP
Impostazione del profilo di comunicazione
Il convertitore propone due profili di comunicazione
● p8980 = 0: Profilo SINAMICS (impostazione di fabbrica)
Un profilo di azionamento definito da Siemens per Ethernet/IP sulla base di PROFIdrive
● p8980 = 1: Profilo ODVA AC/DC Drive
Un profilo di azionamento definito dall'ente ODVA
Selezione telegrammi
Selezionare il telegramma tramite p0922.
Se si lavora con il profilo SINAMICS, è possibile selezionare ognuno dei telegrammi
specificati.
Se si utilizza il profilo AC/DC di ODVA, selezionare il telegramma standard p0922 = 1. Se si
desidera utilizzare gli assemblies descritti nella sezione Oggetti supportati (Pagina 136), non
si può lavorare con il file EDS. In questo caso occorre integrare il convertitore nel controllore.
Impostazione del tempo di sorveglianza bus
La sorveglianza bus viene impostata nel convertitore tramite il parametro p8840.
Se si imposta questo parametro a 0, il convertitore continua a funzionare anche in caso di
anomalia del bus. Impostando un tempo ≠ 0, il convertitore si disinserisce con F08501
"Timeout del valore di riferimento" se il controllore non invia segnali entro questo tempo.
7.5.4
Altre impostazioni quando si lavora con il profilo AC/DC Drive
Se si modificano le impostazioni seguenti nel convertitore tramite accesso ai parametri,
occorre spegnere e riaccendere il convertitore affinché le modifiche diventino attive. In caso
di modifica tramite il controllore con gli oggetti 90 hex o 91 hex, le modifiche diventano attive
immediatamente.
Impostazione della reazione Off per il motore
Con il parametro p8981 si imposta la reazione Off standard per il convertitore:
● p8981 = 0: OFF1 (impostazione di fabbrica) corrisponde anche all'impostazione nel
profilo SINAMICS
● p8981 = 1: OFF2
Per maggiori informazioni su OFF1 e OFF2 vedere la sezione Inserzione/disinserzione del
motore (Pagina 171).
Impostazione della scalatura di numero di giri e coppia
Con il parametro p8982 o p8983 si scala la visualizzazione per numero di giri e coppia.
Campo di regolazione: 25 ... 2-5.
Visualizzazione dei dati di processo max. trasmessi (PZD)
● r2067[0] lunghezza PZD interconnessi max. - ricezione
● p2067[1] lunghezza PZD interconnessi max. - invio
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
135
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
7.5.5
Oggetti supportati
Oggetti Ethernet/IP supportati da G120
Classe oggetto
Nome oggetto
Oggetti
necessari
Oggetti
ODVA
hex
dec
1 hex
1
Identity object
x
4 hex
4
Assembly object
x
6 hex
6
Connection Manager object
x
28 hex
30
Motor Data Object
x
29 hex
31
Supervisor Object
x
x
Oggetti
SINAMICS
2A hex
42
Drive Object
32C hex
44
Siemens Drive Object
x
32D hex
45
Siemens Motordata Object
x
90 hex
144
Parameter object
x
91 hex
145
Parameter object free access (DS47)
x
F5 hex
245
TCP/IP Interface object 1)
x
F6 hex
246
Ethernet Link object 1)
x
401 hex … 43E he
x
1025 … 10
86
Parameter Object
x
1) questi oggetti fanno parte della gestione di sistema Ethernet/IP.
ODVA AC/DC Assembly
Numero
hex
dec
richiesto/
opzionale
Type
Name
14 hex
20
necessario
invio
Basic Speed Control Output
15 hex
21
Opzionale
invio
Extended Speed Control Output
16 hex
22
Opzionale
invio
Speed and Torque Control Output
17 hex
23
Opzionale
invio
Extended Speed and Torque Control Output
18 hex
24
Opzionale
invio
Process Control Output
19 hex
25
Opzionale
invio
Extended Process Control Output
46 hex
70
necessario
ricezione
Basic Speed Control Input
47 hex
71
Opzionale
ricezione
Extended Speed Control Input
48 hex
72
Opzionale
ricezione
Speed and Torque Control Input
49 hex
73
Opzionale
ricezione
Extended Speed and Torque Control Input
4A hex
74
Opzionale
ricezione
Process Control Input
4B hex
75
Opzionale
ricezione
Extended Process Control Input
Convertitori con le Control Unit CU240B-2 e CU240E-2
136
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
Assembly Basic Speed Control, Instance Number: 20, Type: Output
Assembly Basic Speed Control, Instance Number: 70, Type: Input
Assembly Basic Speed Control with parameter assembly, Instance Number: 120, Type: Output
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
137
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
Assembly Basic Speed Control with parameter assembly, Instance Number: 170, Type: Input
Assembly Extended Speed Control, Instance Number: 21, Type: Output
Assembly Extended Speed Control, Instance Number: 71, Type: Input
Convertitori con le Control Unit CU240B-2 e CU240E-2
138
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
Assembly Extended Speed Control with parameter assembly, Instance Number: 121, Type: Output
Byte
0
Bit 7
Bit 6
Bit 5
NetRef
Net CtrL
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Fault
Reset
RUN
Reverse
RUN
Forward
1
2
Speed Reference (Low Byte)
3
Speed Reference (High Byte)
4
Data Out 1 Value (Low Byte)
5
Data Out 1 Value (High Byte)
6
Data Out 2 Value (Low Byte)
7
Data Out 2 Value (High Byte)
8
Data Out 3 Value (Low Byte)
9
Data Out 3 Value (High Byte)
10
Data Out 4 Value (Low Byte)
11
Data Out 4 Value (High Byte)
12
Data Out 5 Value (Low Byte)
13
Data Out 5 Value (High Byte)
14
Data Out 6 Value (Low Byte)
15
Data Out 6 Value (High Byte)
16
Data Out 7 Value (Low Byte)
17
Data Out 7 Value (High Byte)
18
Data Out 8 Value (Low Byte)
19
Data Out 8 Value (High Byte)
20
Data Out 9 Value (Low Byte)
21
Data Out 9 Value (High Byte)
22
Data Out 10 Value (Low Byte)
23
Data Out 10 Value (High Byte)
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
139
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
Assembly Extended Speed Control with parameter assembly, Instance Number: 171, Type: Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
At
Reference
Ref From
Net
Ref From
Net
Ready
Running
Reverse
Running
Forward
Warning
Faulted
1
Drive State
2
Speed Actual (Low Byte)
3
Speed Actual (High Byte)
4
Data In 1 Value (Low Byte)
5
Data In 1 Value (High Byte)
6
Data In 2 Value (Low Byte)
7
Data In 2 Value (High Byte)
8
Data In 3 Value (Low Byte)
9
Data In 3 Value (High Byte)
10
Data In 4 Value (Low Byte)
11
Data In 4 Value (High Byte)
12
Data In 5 Value (Low Byte)
13
Data In 5 Value (High Byte)
14
Data In 6 Value (Low Byte)
15
Data In 6 Value (High Byte)
16
Data In 7 Value (Low Byte)
17
Data In 7 Value (High Byte)
18
Data In 8 Value (Low Byte)
19
Data In 8 Value (High Byte)
20
Data In 9 Value (Low Byte)
21
Data In 9 Value (High Byte)
22
Data In 10 Value (Low Byte)
23
Data In 10 Value (High Byte)
Assembly Basic Speed and Torque Control , Instance Number: 22, Type: Output
Byte
Bit 7
Bit 6
Bit 5
0
Bit 4
Bit 3
Bit 2
Fault
Reset
Bit 1
Bit 0
RUN
Forward
1
Speed Reference (Low Byte)
3
Speed Reference (High Byte)
4
Torque Reference (High Byte)
5
Torque Reference (High Byte)
Convertitori con le Control Unit CU240B-2 e CU240E-2
140
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
Assembly Basic Speed and Torque Control , Instance Number: 72, Type: Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
0
Bit 2
Bit 1
Running
Forward
Bit 0
RUN
Forward
1
2
Speed Actual (Low Byte)
3
Speed Actual (High Byte)
4
Torque Actual (High Byte)
5
Torque Actual (High Byte)
Assembly Basic Speed and Torque Control with parameter assembly , Instance Number: 122, Type:
Output
Byte
Bit 7
Bit 6
Bit 5
0
Bit 4
Bit 3
Bit 2
Fault
Reset
Bit 1
Bit 0
RUN
Forward
1
2
Speed Reference (Low Byte)
3
Speed Reference (High Byte)
4
Torque Reference (High Byte)
5
Torque Reference (High Byte)
6
Data Out 1 Value (Low Byte)
7
Data Out 1 Value (High Byte)
8
Data Out 2 Value (Low Byte)
9
Data Out 2 Value (High Byte)
10
Data Out 3 Value (Low Byte)
11
Data Out 3 Value (High Byte)
12
Data Out 4 Value (Low Byte)
13
Data Out 4 Value (High Byte)
14
Data Out 5 Value (Low Byte)
15
Data Out 5 Value (High Byte)
16
Data Out 6 Value (Low Byte)
17
Data Out 6 Value (High Byte)
18
Data Out 7 Value (Low Byte)
19
Data Out 7 Value (High Byte)
20
Data Out 8 Value (Low Byte)
21
Data Out 8 Value (High Byte)
22
Data Out 9 Value (Low Byte)
23
Data Out 9 Value (High Byte)
24
Data Out 10 Value (Low Byte)
25
Data Out 10 Value (High Byte)
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
141
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
Assembly Basic Speed and Torque Control with parameter assembly , Instance Number: 172, Type:
Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Running
Forward
Bit 0
Faulted
1
2
Speed Actual (Low Byte)
3
Speed Actual (High Byte)
4
Torque Actual (High Byte)
5
Torque Actual (High Byte)
6
Data In 1 Value (Low Byte)
7
Data In 1 Value (High Byte)
8
Data In 2 Value (Low Byte)
9
Data In 2 Value (High Byte)
10
Data In 3 Value (Low Byte)
11
Data In 3 Value (High Byte)
12
Data In 4 Value (Low Byte)
13
Data In 4 Value (High Byte)
14
Data In 5 Value (Low Byte)
15
Data In 5 Value (High Byte)
16
Data In 6 Value (Low Byte)
17
Data In 6 Value (High Byte)
18
Data In 7 Value (Low Byte)
19
Data In 7 Value (High Byte)
20
Data In 8 Value (Low Byte)
Data In 8 Value (High Byte)
22
Data In 9 Value (Low Byte)
23
Data In 9 Value (High Byte)
24
Data In 10 Value (Low Byte)
25
Data In 10 Value (High Byte)
Extended Speed and Torque Control, Instance Number: 23, Type: Output
Byte
0
Bit 7
Bit 6
Bit 5
NetRef
Net CtrL
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Fault
Reset
RUN
Reverse
RUN
Forward
1
2
Speed Reference (Low Byte)
3
Speed Reference (High Byte)
4
Torque Reference (High Byte)
5
Torque Reference (High Byte)
Convertitori con le Control Unit CU240B-2 e CU240E-2
142
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
Extended Speed and Torque Control, Instance Number: 73, Type: Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
At
Reference
Ref From
Net
Crtl From
Net
Ready
Running
Reverse
Running
Forward
Warning
Faulted
1
Drive State
2
Speed Actual (Low Byte)
3
Speed Actual (High Byte)
4
Torque Actual (High Byte)
5
Torque Actual (High Byte)
Basic Speed and Torque Control with parameter assembly, Instance Number: 123, Type: Output
Byte
0
Bit 7
Bit 6
Bit 5
NetRef
Net CtrL
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Fault
Reset
RUN
Reverse
RUN
Forward
1
2
Speed Reference (Low Byte)
3
Speed Reference (High Byte)
4
Torque Reference (High Byte)
5
Torque Reference (High Byte)
6
Data Out 1 Value (Low Byte)
7
Data Out 1 Value (High Byte)
8
Data Out 2 Value (Low Byte)
9
Data Out 2 Value (High Byte)
10
Data Out 3 Value (Low Byte)
11
Data Out 3 Value (High Byte)
12
Data Out 4 Value (Low Byte)
13
Data Out 4 Value (High Byte)
14
Data Out 5 Value (Low Byte)
15
Data Out 5 Value (High Byte)
16
Data Out 6 Value (Low Byte)
17
Data Out 6 Value (High Byte)
18
Data Out 7 Value (Low Byte)
19
Data Out 7 Value (High Byte)
20
Data Out 8 Value (Low Byte)
21
Data Out 8 Value (High Byte)
22
Data Out 9 Value (Low Byte)
23
Data Out 9 Value (High Byte)
24
Data Out 10 Value (Low Byte)
25
Data Out 10 Value (High Byte)
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
143
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
Basic Speed and Torque Control with parameter assembly, Instance Number: 173, Type: Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
At
Reference
Ref From
Net
Crtl From
Net
Ready
Running
Reverse
Running
Forward
Warning
Faulted
1
Drive State
2
Speed Actual (Low Byte)
3
Speed Actual (High Byte)
4
Torque Actual (High Byte)
5
Torque Actual (High Byte)
6
Data In 1 Value (Low Byte)
7
Data In 1 Value (High Byte)
8
Data In 2 Value (Low Byte)
9
Data In 2 Value (High Byte)
10
Data In 3 Value (Low Byte)
11
Data In 3 Value (High Byte)
12
Data In 4 Value (Low Byte)
13
Data In 4 Value (High Byte)
14
Data In 5 Value (Low Byte)
15
Data In 5 Value (High Byte)
16
Data In 6 Value (Low Byte)
17
Data In 6 Value (High Byte)
18
Data In 7 Value (Low Byte)
19
Data In 7 Value (High Byte)
20
Data In 8 Value (Low Byte)
21
Data In 8 Value (High Byte)
22
Data In 9 Value (Low Byte)
23
Data In 9 Value (High Byte)
24
Data In 10 Value (Low Byte)
25
Data In 10 Value (High Byte)
Convertitori con le Control Unit CU240B-2 e CU240E-2
144
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.5 Comunicazione tramite Ethernet/IP
7.5.6
Creazione di un modulo I/O generico
Per determinati controllori non è possibile utilizzare il file EDS messo a disposizione da
ODVA. In questi casi occorre creare nel controllore un modulo I/O generico per la
comunicazione ciclica.
Procedura
Per creare un modulo I/O generico, procedere nel seguente modo:
1. Creare nel controllore un nuovo "Modulo I/O" del tipo "Generic" selezionando "Nuovo
modulo".
2. Immettere nel controllore le lunghezze dei dati di processo per la comunicazione ciclica
selezionate in STARTER, r2067[0] (Input), r2067[1] (Output), ad es.: Telegramma
standard 2/2 .
3. Impostare in STARTER gli stessi valori per Indirizzo IP, Subnet Mask, Default Gateway e
Name of Station come nel controllore (vedere Impostazioni di comunicazione per
Ethernet/IP (Pagina 134))
Si è così creato un modulo I/O generico per la comunicazione ciclica con il convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
145
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
7.6
Comunicazione tramite RS485
7.6.1
Integrazione del convertitore tramite l'interfaccia RS485 in un sistema a bus
Collegamento ad una rete tramite RS485
Collegare il convertitore tramite l'interfaccia RS485 con il bus di campo. La posizione e
l'assegnazione dell'interfaccia RS485 sono descritte nella sezione Interfacce, connettori,
interruttori, morsettiere e LED della CU (Pagina 51). I collegamenti di questo connettore
sono a prova di cortocircuito e a potenziale libero.
Figura 7-8
Rete di comunicazione tramite RS485
Per il primo e l'ultimo nodo è necessario attivare la resistenza terminale di chiusura del bus.
La posizione della resistenza terminale di chiusura del bus è indicata nella sezione
Interfacce, connettori, interruttori, morsettiere e LED della CU (Pagina 51).
Nota
Durante il funzionamento del bus, al primo e all'ultimo nodo di bus deve essere sempre
fornita tensione. In caso contrario la comunicazione con gli altri nodi viene interrotta.
Fatta eccezione per il primo e l'ultimo slave, è possibile rimuovere degli slave dal bus
laddove necessario Per fare questo estrarre il connettore del bus. La comunicazione con gli
altri nodi non viene interrotta.
Comunicazione con il controllore anche con il Power Module scollegato dalla tensione di rete
Se la comunicazione con il controllore deve restare attiva quando viene disinserita la
tensione di rete, è necessario alimentare la Control Unit con DC 24 V tramite i morsetti 31 e
32.
In caso di brevi interruzioni della tensione di alimentazione a 24 V è possibile che il
convertitore segnali l'anomalia senza che venga interrotta la comunicazione con il
controllore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
146
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
7.6.2
Comunicazione tramite USS
Il protocollo USS è una connessione dati seriale tra un master e uno o più slave. Un master
è ad es.:
● Un controllore programmabile (ad es. SIMATIC S7-200)
● Un PC
Il convertitore è sempre uno slave.
Il numero massimo possibile di slave è 31.
La lunghezza massima del cavo è di 100 m.
Per informazioni sul collegamento del convertitore al bus di campo USS, vedere la sezione
Integrazione del convertitore tramite l'interfaccia RS485 in un sistema a bus (Pagina 146).
7.6.2.1
Impostazioni di base per la comunicazione
Impostazione dell'indirizzo
L'indirizzo del bus del convertitore si imposta tramite
lo switch indirizzi sulla Control Unit, tramite il
parametro p2021 o in STARTER.
Campo indirizzi valido: 1 … 30
Se è stato impostato un indirizzo valido tramite il
relativo switch, questo indirizzo resta sempre attivo e
il parametro p2021 (impostazione di fabbrica: 0) non
può essere modificato.
La posizione dello switch indirizzi è descritta nella
sezione: Interfacce, connettori, interruttori,
morsettiere e LED della CU (Pagina 51).
Procedura
Per modificare l'indirizzi del bus, procedere nel seguente modo:
1. Impostare l'indirizzo in uno dei modi descritti:
– tramite lo switch indirizzi
– con un Operator Panel tramite p2021
– in STARTER tramite le maschere "Control Unit/Comunicazione/Bus di campo" o
tramite la Lista esperti con p2021
2. Disinserire la tensione di alimentazione del convertitore, compresa l'alimentazione a 24 V
se presente,
per la Control Unit.
3. Reinserire le tensioni una volta che tutti i LED sul convertitore sono spenti.
L'indirizzo del bus è stato modificato.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
147
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Altre impostazioni
Parametri
Descrizione
p0015 = 21
Macro apparecchio di azionamento
Selezione della configurazione I/O
p2020
Impostazione baud rate
Valore Baud rate
4
5
6
7
8
Valore Baud rate
9
10
11
12
13
57600
76800
93750
115200
187500
p2022
Numero PZD nel telegramma USS dell'interfaccia del bus di campo
Impostazione del numero di parole a 16 bit nella parte PZD del telegramma USS
Intervallo di regolazione: 0… 8 (0 … 8 parole)
p2023
Numero PKW nel telegramma USS dell'interfaccia del bus di campo
Impostazione del numero di parole a 16 bit nella parte PZD del telegramma USS
Intervallo di regolazione:
p2040
7.6.2.2
2400
4800
9600
19200
38400
•
0, 3, 4: 0, 3 o 4 parole
•
127:
lunghezza variabile
Tempo di sorveglianza dell'interfaccia del bus di campo [ms]
Impostazione del tempo di sorveglianza dei dati di processo ricevuti tramite il bus di
campo. Quando non si riceve alcun dato di processo entro questo periodo, viene
emesso il corrispondente messaggio.
Struttura del telegramma
Panoramica
Un telegramma USS è composto da una serie di elementi in una sequenza prestabilita. Ogni
elemento contiene 11 bit.
Figura 7-9
Struttura di un telegramma USS
Convertitori con le Control Unit CU240B-2 e CU240E-2
148
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Parte telegramma
Descrizione
Ritardo di avvio /
Ritardo di risposta
Tra due telegrammi vi è sempre un ritardo di avvio e/o di risposta (vedere
anche Sorveglianza telegramma (Pagina 156))
STX
Un carattere ASCII (02 hex) indica l'inizio del messaggio.
LGE
La lunghezza del telegramma "LGE" si calcola nel modo seguente:
LGE = dati utili (n byte) + ADR (1 byte) + BCC (1 byte)
ADR
7.6.2.3
•
Bit 7 = 0: scambio di dati normale.
Bit 7 =1 per la trasmissione di telegrammi che richiedono una struttura dei
dati utile che si discosta dal profilo dell'apparecchio.
•
Bit 6 = 0: scambio di dati normale.
Bit 6 = 1: test del collegamento del bus: il convertitore restituisce al master
il telegramma invariato.
•
Bit 5 = 0: scambio di dati normale.
(bit 5 = 1: non supportato nel convertitore)
•
Bit 0 … 4: indirizzo del convertitore.
Dati utili
Vedere la sezione Settore dei dati utili del telegramma USS (Pagina 149).
BCC
Checksum (OR esclusivo) per tutti i byte del telegramma tranne BCC.
Settore dei dati utili del telegramma USS
Il settore dei dati utili è costituito dai seguenti elementi:
● Canale parametri (PKW) per la scrittura e la lettura dei valori dei parametri
● Dati di processo (PZD) per il controllo dell'azionamento.
Figura 7-10
Telegramma USS - Struttura dei dati utili
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
149
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Canale parametri
Nel parametro p2023 viene definita la lunghezza del canale parametri.
Canale parametri di lunghezza fissa e variabile
● p2023 = 0
Con questa impostazione non vengono trasmessi valori del parametro.
● p2023 = 3
È possibile scegliere questa impostazione quando si desidera leggere o scrivere solo dati
a 16 bit o segnali di allarme.
● p2023 = 4:
Questa impostazione è necessaria se si desidera leggere o scrivere valori a 32 bit (ad
es. parametri indicizzati o parametri di bit come r0722.2). In questo caso il telegramma di
invio o di ricezione comprende sempre 4 parole, anche se ne sarebbero necessarie solo
3. I valori vengono immessi allineati a destra nella 4ª parola.
● p2023 = 127:
Se si imposta p2023 = 27 (lunghezza variabile), i telegrammi di invio e di ricezione sono
lunghi esattamente come richiesto dal job.
Dati di processo
Il parametro p2022 definisce la lunghezza per i dati di processo. È possibile trasmettere fino
a 8 dati di processo in un telegramma (p2022 = 0 … 8). Con p2022 = 0 non viene trasmesso
alcun dato di processo.
7.6.2.4
Canale parametri USS
Struttura del canale parametri
A seconda dell'impostazione in p2023, il canale parametri ha una lunghezza fissa di tre o
quattro parole o una lunghezza variabile che dipende dalla lunghezza dei dati da
trasmettere.
La 1ª e la 2ª parola contengono il numero del parametro, l'indice e il tipo di job (lettura o
scrittura). Nelle altre parole del canale parametri vi sono i contenuti dei parametri. I contenuti
dei parametri possono essere valori a 8 bit, a 16 bit (ad es. baud rate) o a 32 bit (ad es.
parametri CO). I contenuti dei parametri vengono immessi allineati a destra nella parola con
il numero più alto. Le parole non necessarie vengono occupate con 0.
Il bit 11 nella 1ª parola è riservato ed è sempre occupato con 0.
La figura mostra un canale parametri con lunghezza di quattro parole.
Esempi di telegramma sono riportati al termine di questa sezione.
Convertitori con le Control Unit CU240B-2 e CU240E-2
150
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Codice di richiesta e codice di risposta
I bit 12 … 15 della 1ª parola del canale dei parametri contengono il codice di richiesta e il
codice di risposta. I codici possibili e le ulteriori spiegazioni sono riportate nelle seguenti
tabelle.
Panoramica dei codici di richiesta controllore → convertitore
Codice di
richiesta
Descrizione
Codice di risposta
0
Nessuna richiesta
0
7/8
1
Richiesta valore del parametro
1/2
7/8
2
Modifica valore del parametro (parola)
1
7/8
3
Modifica valore del parametro (parola doppia)
2
7/8
4
Richiesta elemento descrittivo
3
7/8
62)
Richiesta valore del parametro (campo)
4/5
7/8
72)
Modifica valore del parametro (campo, parola) 1)
4
7/8
82)
Modifica valore del parametro (campo, parola doppia)
5
7/8
9
Richiesta numero di elementi di campo
6
7/8
positivo
1)
1)
1)
L'elemento desiderato del parametro è specificato in IND (2ª parola).
2)
I seguenti codici di richiesta sono identici: 1 ≡ 6, 2 ≡ 7 3 ≡ 8.
Si consiglia di utilizzare i codici 6, 7 e 8.
1)
negativo
Panoramica dei codici di richiesta convertitore → controllore
Il codice di risposta dipende dal codice di richiesta.
Codice di
risposta
Descrizione
0
Nessuna risposta
1
Trasmissione valore parametro (parola)
2
Trasmissione valore parametro (parola doppia)
3
Trasmissione elemento descrittivo 1)
4
Trasmissione valore parametro (campo, parola) 2)
5
Trasmissione valore parametro (campo, parola doppia) 2)
6
Trasmissione numero di elementi di campo
7
Il convertitore non può elaborare la richiesta (con numero di errore)
8
Nessuno stato del controllore master/Nessuna autorizzazione alla modifica di
parametri dell'interfaccia del canale parametri
1) L'elemento desiderato del parametro è specificato in IND (2ª parola).
2) L'elemento desiderato del parametro indicizzato è specificato in IND (2ª parola).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
151
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Panoramica dei numeri di errore con codice di risposta 7 (il convertitore non può elaborare la
richiesta)
Con il codice di risposta 7, il convertitore invia al controllore uno dei seguenti numeri di
errore nella parola più alta del canale parametri.
N.
Descrizione
00 hex
Numero parametro non ammesso (accesso a parametri non disponibili)
01 hex
Valore parametro non modificabile (job di modifica per un valore parametro non
modificabile)
02 hex
Limite inferiore o superiore valore superato (job di modifica con valore al di fuori dei limiti
ammessi.
03 hex
Sottoindice errato (accesso a un sottoindice non disponibile).
04 hex
Nessun array (accesso con un sottoindice a un parametro non indicizzato)
05 hex
Tipo dati errato (job di modifica con valore non adatto al tipo di dati del parametro)
06 hex
Impostazione non ammessa, consentito solo l'azzeramento (job di modifica con valore
diverso da 0 senza autorizzazione).
07 hex
Elemento descrittivo non modificabile (job di modifica a elemento descrittivo non
modificabile.valore di errore)
0B hex
Nessuna priorità di comando (job di modifica in assenza di priorità di comando, vedere
anche p0927)
0C hex
Parola chiave mancante
11 hex
Job non eseguibile a causa dello stato operativo (accesso impossibile per motivi
temporanei non meglio specificati)
14 hex
Valore non consentito (job di modifica con un valore che rientra nei limiti dei valori, ma che
non è ammesso per altri motivi permanenti, ovvero un parametro con valori singoli
definiti).
65 hex
Numero del parametro attualmente disattivato (a seconda dello stato operativo del
convertitore)
66 hex
Larghezza del canale insufficiente (canale di comunicazione troppo piccolo per la risposta)
68 hex
Valore del parametro non consentito (il parametro ammette solo determinati valori)
6A hex
Richiesta non contenuta/Task non supportato (i codici di richiesta validi sono riportati nella
tabella "Codici di richiesta controllore → convertitore")
6B hex
Nessun accesso in modifica con regolatore abilitato. (lo stato operativo del convertitore
impedisce la modifica dei parametri)
86 hex
Accesso in scrittura solo alla messa in servizio (p0010 = 15) (lo stato operativo del
convertitore impedisce la modifica dei parametri)
87 hex
Protezione know-how attiva, accesso bloccato
C8 hex
Job di modifica al di sotto del limite attualmente valido (job di modifica su un valore che
rientra nei limiti "assoluti", ma che si trova al di sotto del limite inferiore attualmente valido)
C9 hex
Job di modifica al di sopra del limite attualmente valido (esempio: un valore di parametro è
troppo alto per la potenza del convertitore).
CC hex
Job di modifica non consentito (modifica non ammessa perché la chiave di accesso non è
disponibile)
Convertitori con le Control Unit CU240B-2 e CU240E-2
152
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Numero del parametro
Numeri parametri < 2000
PNU = numero parametro.
Scrivere il numero del parametro in PNU (PKE, bit 10 … 0).
Numeri parametri ≥ 2000
PNU = numero parametro - offset.
Scrivere il numero del parametro meno l'offset in PNU (PKE,
bit 10 … 0).
Scrivere l'offset nell'indice pagine (IND, bit 15 … 8).
Tabella 7- 9
Offset e indice pagine dei numeri dei parametri
Numero del
parametro
Offset
Indice pagine
Hex
Bit 15
Bit 14 Bit 13
Bit 12 Bit 11
Bit 10
Bit 9
Bit 8
0000 … 1999
0
0 hex
0
0
0
0
0
0
0
0
2000 … 3999
2000
80 hex
1
0
0
0
0
0
0
0
6000 … 7999
6000
90 hex
1
0
0
1
0
0
0
0
8000 … 9999
8000
20 hex
0
0
1
0
0
0
0
0
10000 … 11999
10000
A0 hex
1
0
1
0
0
0
0
0
20000 … 21999
20000
50 hex
0
1
0
1
0
0
0
0
30000 … 31999
30000
F0 hex
1
1
1
1
0
0
0
0
60000 … 61999
60000
74 hex
0
1
1
1
0
1
0
0
Parametri indicizzati
Nei parametri indicizzati è necessario scrivere l'indice come valore esadecimale nel
sottoindice (IND, bit 7 … 0).
Contenuti dei parametri
I contenuti dei parametri possono essere valori dei parametri o parametri connettore. Per i
parametri connettore sono necessarie due parole. Per l'interconnessione di parametri
connettore vedere anche la sezione: Interconnessione dei segnali nel convertitore
(Pagina 372).
Immettere il valore del parametro allineato a destra nel canale parametri, come segue:
• Valori a 8 bit: Low Word, bit 0 … 7,
I bit 8 … 15 sono zero.
• Valori a 16 bit: Low Word, bit 0 … 15,
• Valori a 32 bit: Low Word e High Word
Immettere un parametro connettore allineato a destra, come segue:
High Word
• Numero del parametro connettore:
• Drive Object del parametro connettore:
Low Word, bit 10 … 15
• Indice o numero di campo bit del
parametro connettore:
Low Word, bit 0 … 9
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
153
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Esempi di telegramma, lunghezza del canale parametri = 4
Richiesta di lettura: lettura del numero di serie del Power Module (p7841[2])
Per ottenere il valore del parametro indicizzato p7841 è necessario compilare il telegramma
del canale parametri con i seguenti dati:
● PKE, bit 12 … 15 (AK): = 6 (richiesta valore parametro (campo))
● PKE, bit 0 … 10 (PNU): = 1841 (numeri di parametro senza offset)
Numero di parametro = PNU + offset (indice pagine)
(7841 = 1841 + 6000)
● IND, bit 8 … 15 (indice pagine): = 90 hex (offset 6000 ≙ 90 hex)
● IND, bit 0 … 7 (sottoindice): = 2 (indice del parametro)
● Poiché si desidera leggere il valore del parametro, le parole 3 e 4 nel canale parametri
sono irrilevanti per la richiesta del valore del parametro e devono essere impostate ad es.
con il valore 0.
Figura 7-11
Telegramma per richiesta di lettura di p7841[2]
Job di scrittura: modifica della modalità di reinserzione automatica (p1210)
Il parametro p1210 definisce la modalità di reinserzione automatica.
● PKE, bit 12 … 15 (AK): = 7 (modifica valore del parametro (campo, parola))
● PKE, bit 0 … 10 (PNU): = 4BA hex (1210 = 4BA hex, nessun offset poiché 1210 < 1999)
● IND, bit 8 … 15 (indice pagine): = 0 hex (offset 0 corrisponde a 0 hex)
● IND, bit 0 … 7 (sottoindice): = 0 hex (parametro non indicizzato)
● PWE1, bit 0 … 15: = 0 hex
● PWE2, bit 0 … 15: = 1A hex (26 = 1A hex)
Figura 7-12
Telegramma per attivare la reinserzione automatica con p1210 = 26
Convertitori con le Control Unit CU240B-2 e CU240E-2
154
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Job di scrittura: assegnazione dell'ingresso digitale 2 con la funzione ON/OFF1
(p0840[1] = 722.2)
Per collegare l'ingresso digitale 2 con ON/OFF1, è necessario assegnare al parametro
p0840[1] (sorgente ON/OFF1) il valore 722.2 (DI 2). A tale scopo il telegramma del canale
parametri deve essere compilato come segue:
● PKE, bit 12 … 15 (AK): = 7 hex (modifica valore parametro (campo, parola))
● PKE, bit 0 … 10 (PNU): = 348 hex (840 = 348 hex, nessun offset poiché 840 < 1999)
● IND, bit 8 … 15 (indice pagine): = 0 hex (offset 0 ≙ 0 hex)
● IND, bit 0 … 7 (sottoindice): = 1 hex (set di dati di comando CDS1 = indice1)
● PWE1, bit 0 … 15: = 2D2 hex (722 = 2D2 hex)
● PWE2, bit 10 … 15: = 3f hex (Drive Object - in SINAMICS G120 sempre 63 = 3f hex)
● PWE2, bit 0 … 9: = 2 hex (indice o numero di bit del parametro: DI 2 = r0722.2)
Figura 7-13
Telegramma per assegnare ON/OFF1 a DI 2
7.6.2.5
Canale dati di processo USS (PZD)
Descrizione
Il canale dei dati di processo (PZD) contiene, a seconda della direzione di trasmissione, i
seguenti dati:
● Parole di comando e valori di riferimento per lo slave
● Parole di stato e valori attuali per il master.
Figura 7-14
Canale dei dati di processo
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
155
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Le prime due parole sono:
● Parola di comando 1 (STW1) e valore di riferimento principale (HSW)
● Parola di stato 1 (ZSW1) e valore attuale principale (HIW)
Se p2022 è maggiore o uguale a 4, il convertitore riceve la parola di comando aggiuntiva
(STW2).
Il comando p2051 consente di definire le sorgenti dei PZD.
Ulteriori informazioni sono disponibili nel Manuale delle liste.
7.6.2.6
Sorveglianza telegramma
Per impostare la sorveglianza dei telegrammi, utilizzare i relativi tempi di esecuzione. Per il
tempo di trasmissione dei caratteri è fondamentale il tempo di esecuzione del telegramma:
Tabella 7- 10 Tempo di trasmissione dei caratteri
Baudrate in bit/s
Tempo di trasmissione per bit
Tempo di trasmissione dei caratteri
(= 11 bit)
9600
104.170 µs
1,146 ms
19200
52.084 µs
0,573 ms
38400
26.042 µs
0,286 ms
115200
5.340 µs
0,059 ms
Il tempo di esecuzione del telegramma è maggiore della semplice somma di tutti i tempi di
trasmissione dei caratteri (= tempo residuo). Occorre tenere presente anche il tempo di
ritardo dei caratteri tra i singoli caratteri del telegramma.
Figura 7-15
Tempo di esecuzione del telegramma come somma del tempo residuo e dei tempi di
ritardo dei caratteri
Il tempo di esecuzione del telegramma complessivo è sempre inferiore al 150% del semplice
tempo residuo.
Il master deve rispettare il ritardo di avvio prima di ogni telegramma di richiesta. Il ritardo di
avvio deve essere > 2 x tempo di trasmissione dei caratteri.
Lo slave risponde solo quando è trascorso il ritardo di risposta.
Convertitori con le Control Unit CU240B-2 e CU240E-2
156
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Figura 7-16
Ritardo di avvio e ritardo di risposta
La durata del ritardo di avvio corrisponde almeno al tempo di due caratteri e dipende dalla
velocità di trasmissione.
Tabella 7- 11 Durata del ritardo di avvio
Baudrate in bit/s
Tempo di trasmissione per carattere (= 11 bit)
Ritardo di avvio min.
9600
1,146 ms
> 2,291 ms
19200
0,573 ms
> 1,146 ms
38400
0,286 ms
> 0,573 ms
57600
0,191 ms
> 0,382 ms
115200
0,059 ms
> 0,117 ms
Nota: il tempo di ritardo dei caratteri deve essere minore del ritardo di avvio.
Sorveglianza telegramma del master
Si consiglia di sorvegliare con il master USS i seguenti tempi:
• Ritardo di risposta:
Tempo di reazione dello slave a una richiesta del master
Il ritardo di risposta deve essere minore di < 20 ms, ma maggiore
del ritardo di avvio
• Tempo di esecuzione Tempo di trasmissione del telegramma di risposta inviato dallo
slave
del telegramma:
Sorveglianza telegramma del convertitore
Il convertitore sorveglia il tempo tra due richieste del master. Dal parametro p2040 dipende il
tempo ammesso in ms. Il convertitore indica un superamento di un tempo p2040 ≠ 0 come
interruzione del telegramma e reagisce con l'anomalia F01910.
Il valore orientativo per l'impostazione di p2040 è pari al 150% del tempo residuo, ovvero al
tempo di esecuzione del telegramma senza considerare i tempi di ritardo dei caratteri.
Nella comunicazione tramite USS, il convertitore verifica il bit 10 della parola di comando
ricevuta 1. Se con il motore inserito ("funzionamento") il bit non è impostato, il convertitore
reagisce con l'anomalia F07220.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
157
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
7.6.3
Comunicazione tramite Modbus RTU
Panoramica della comunicazione con Modbus
Il protocollo Modbus è un protocollo di comunicazione con tipologia della linea basato su
un'architettura master/slave.
Il Modbus prevede tre tipi di trasmissione:
● Modbus ASCII
Dati in codice ASCII. La percentuale di dati è inferiore rispetto a RTU.
● Modbus RTU (RTU: Remote Terminal Unit , unità terminale remota)
Dati in formato binario. La percentuale di dati è superiore rispetto al codice ASCII.
● Modbus TCP
Dati sotto forma di pacchetti TCP/IP. La porta TCP 502 è riservata al Modbus TCP. Il
Modbus TCP si trova attualmente nella fase di definizione come norma (IEC PAS 62030
(prestandard)).
La Control Unit supporta il Modbus RTU come slave con parità pari.
Impostazioni della comunicazione
● La comunicazione con Modbus RTU avviene tramite l'interfaccia RS485, con massimo
247 slave.
● La lunghezza massima del cavo è di 100 m.
● Per la polarizzazione del segnale di ricezione e di trasmissione sono disponibili due
resistenze da 100 kΩ.
Nota
Commutazione delle unità non consentita
La funzione "Commutazione unità (Pagina 213)" non è ammessa con questo sistema di bus!
Convertitori con le Control Unit CU240B-2 e CU240E-2
158
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
7.6.3.1
Impostazioni di base per la comunicazione
L'indirizzo del bus del convertitore si imposta tramite
lo switch indirizzi sulla Control Unit, tramite il
parametro p2021 o in STARTER.
Con il parametro p2021 (impostazione di fabbrica: 1)
oppure tramite STARTER, l'indirizzo può essere
impostato solo se tutti gli switch indirizzi si trovano su
"OFF" (0).
Campo indirizzo valido:
1 … 247
Se è stato impostato un indirizzo valido tramite il
relativo switch, questo indirizzo resta sempre attivo e
il parametro p2021 (impostazione di fabbrica: 1) non
può essere modificato.
La posizione dello switch indirizzi è descritta nella
sezione: Interfacce, connettori, interruttori,
morsettiere e LED della CU (Pagina 51).
Procedura
Per modificare l'indirizzi del bus, procedere nel seguente modo:
1. Impostare l'indirizzo in uno dei modi descritti:
– tramite lo switch indirizzi
– con un Operator Panel tramite p2021
– in STARTER tramite le maschere "Control Unit/Comunicazione/Bus di campo" o
tramite la Lista esperti con p2021
2. Disinserire la tensione di alimentazione del convertitore, compresa l'alimentazione a 24 V
se presente,
per la Control Unit.
3. Reinserire le tensioni una volta che tutti i LED sul convertitore sono spenti.
L'indirizzo del bus è stato modificato.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
159
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Altre impostazioni
Parametri
p0015 = 21
Descrizione
Macro apparecchio di azionamento
Selezione della configurazione I/O
p2030 = 2
Selezione del protocollo del bus di campo
2: Modbus
p2020
Velocità di trasmissione del bus di campo
impostazione di fabbrica = 19200 bit/s
p2024
Timing del Modbus(vedere la sezione "Velocità di trasmissione e tabelle di mappatura
(Pagina 161)")
•
Indice 0: tempo massimo di elaborazione del telegramma slave:
Tempo dopo il quale lo slave deve aver inviato una risposta al master.
•
Indice 1: Tempo di ritardo caratteri:
Tempo di ritardo caratteri: tempo di ritardo massimo ammesso tra singoli caratteri
nel frame Modbus. (Tempo di elaborazione standard per Modbus per 1,5 byte).
•
Indice2: tempo di pausa dei telegrammi:
tempo di ritardo massimo ammesso tra telegrammi Modbus. (Tempo di
elaborazione standard per Modbus per 3,5 byte).
p2029
Statistica degli errori del bus di campo
Visualizzazione degli errori di ricezione sull'interfaccia del bus di campo
p2040
Tempo di sorveglianza dei dati di processo
Fissa il tempo trascorso il quale viene generato un allarme se non vengono inviati dati
di processo.
Nota: Il tempo deve essere adattato in funzione del numero di slave e della velocità di
trasmissione impostata sul bus. (impostazione di fabbrica = 100 ms).
Convertitori con le Control Unit CU240B-2 e CU240E-2
160
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
7.6.3.2
Telegramma Modbus RTU
Descrizione
Il Modbus comprende un master e fino a 247 slave. Il master avvia sempre la
comunicazione. Gli slave possono trasmettere dati solo su richiesta del master. La
comunicazione tra slave non è consentita. La Control Unit funziona sempre come uno slave.
La figura seguente mostra la struttura di un telegramma del Modbus RTU.
Figura 7-17
Modbus con tempi di ritardo
L'area dati del telegramma è strutturata conformemente alle tabelle di mappatura.
7.6.3.3
Velocità di trasmissione e tabelle di mappatura
Velocità di trasmissione ammesse e ritardi di telegramma
Il telegramma del Modbus RTU richiede delle pause nei casi seguenti:
● Riconoscimento iniziale
● tra i singoli frame
● Riconoscimento finale
Durata minima: Tempo di elaborazione per 3,5 byte (impostabile tramite p2024[2]).
Inoltre tra i singoli byte di un frame è ammesso un tempo di ritardo dei caratteri. Durata
massima: Tempo di elaborazione per 1,5 byte (impostabile tramite p2024[1]).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
161
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Tabella 7- 12 Velocità di trasmissione, tempi di trasmissione e ritardi
Velocità di trasmissione in
bit/s (p2020)
Tempo di trasmissione Pausa minima tra due
per carattere (11 bit)
telegrammi (p2024[2])
Pausa massima tra
due byte (p2024[1])
4800
2,292 ms
≥ 8,021 ms
≤ 3,438 ms
9600
1,146 ms
≥ 4,010 ms
≤ 1,719 ms
19200 (impostazione di
fabbrica)
0,573 ms
≥ 1,75 ms
≤ 0,859 ms
38400
0,286 ms
≥ 1,75 ms
≤ 0,75 ms
57600
0,191 ms
≥ 1,75 ms
≤ 0,556 ms
76800
0,143 ms
≥ 1,75 ms
≤ 0,417 ms
93750
0,117 ms
≥ 1,75 ms
≤ 0,341 ms
115200
0,095 ms
≥ 1,75 ms
≤ 0,278 ms
187500
0,059 ms
≥ 1,75 ms
≤ 0,171 ms
Nota
L'impostazione di fabbrica per p2024[1] e p2024[2] è 0. Il convertitore definisce i valori a
seconda della scelta del protocollo (p2030) o della velocità di trasmissione.
Registro Modbus e parametri della Control Unit
Il protocollo Modbus contiene numeri di registro o di bit per l'indirizzamento della memoria.
Questo registro deve essere assegnato nello slave alle parole di comando, parole di stato e
ai parametri corrispondenti.
Il convertitore supporta le seguenti aree di indirizzi:
Area di indirizzo
Nota
40001 … 40065
compatibile con il Micromaster MM436
40100 … 40522
L'area di indirizzi valida del registro di holding si estende da 40001 a 40522. L'accesso ad
altri registri di holding causa l'errore "Exception Code".
I registri da 40100 a 40111 vengono definiti come dati di processo.
Nota
"R"; "W"; "R/W" nella colonna Accesso al Modbus indicano rispettivamente lettura (read con
FC03); scrittura (write con FC06); lettura/scrittura (read/write).
Convertitori con le Control Unit CU240B-2 e CU240E-2
162
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Tabella 7- 13 Assegnazione dei registri Modbus ai parametri della Control Unit
N.
Descrizione
registro
Modbus
Acces
-so
Modb
us
Unità
Fattore
di
normazi
one
Testo On-/OFF
Dati / Parametri
o campo di valori
Dati di processo
Dati di regolazione
40100
Parola di comando
R/W
--
1
Dati di processo 1
40101
Valore di riferimento principale
R/W
--
1
Dati di processo 2
Dati di stato
40110
Parola di stato
R
--
1
Dati di processo 1
40111
Valore attuale principale
R
--
1
Dati di processo 2
Dati dei parametri
Uscite digitali
40200
DO 0
R/W
--
1
HIGH
LOW
p0730, r747.0, p748.0
40201
DO 1
R/W
--
1
HIGH
LOW
p0731, r747.1, p748.1
40202
DO 2
R/W
--
1
HIGH
LOW
p0732, r747.2, p748.2
Uscite analogiche
40220
AO 0
R
%
100
-100.0 … 100.0
r0774.0
40221
AO 1
R
%
100
-100.0 … 100.0
r0774.1
Ingressi digitali
40240
DI 0
R
--
1
HIGH
LOW
r0722.0
40241
DI 1
R
--
1
HIGH
LOW
r0722.1
40242
DI 2
R
--
1
HIGH
LOW
r0722.2
40243
DI 3
R
--
1
HIGH
LOW
r0722.3
40244
DI 4
R
--
1
HIGH
LOW
r0722.4
40245
DI 5
R
--
1
HIGH
LOW
r0722.5
Ingressi analogici
40260
AI 0
R
%
100
-300.0 … 300.0
r0755 [0]
40261
AI 1
R
%
100
-300.0 … 300.0
r0755 [1]
40262
AI 2
R
%
100
-300.0 … 300.0
r0755 [2]
40263
AI 3
R
%
100
-300.0 … 300.0
r0755 [3]
Identificazione del convertitore
40300
Numero stack alimentazione
R
--
1
40301
Firmware del convertitore
R
--
0.0001
0 … 32767
r0200
0.00 … 327.67
r0018
Dati del convertitore
40320
Potenza nominale della parte di
potenza
R
kW
100
0 … 327.67
r0206
40321
Limite di corrente
R/W
%
10
10.0 … 400.0
p0640
40322
Tempo di accelerazione
R/W
s
100
0.00 … 650.0
p1120
40323
Tempo di decelerazione
R/W
s
100
0.00 … 650.0
p1121
40324
N. giri di riferimento
R/W
RPM
1
6.000 … 32767
p2000
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
163
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Diagnostica convertitore
40340
Valore di riferimento del numero di giri
R
RPM
1
-16250 … 16250
r0020
40341
Valore attuale del numero di giri
R
RPM
1
-16250 … 16250
r0022
40342
Frequenza di uscita
R
Hz
100
40343
Tensione di uscita
R
V
1
0 … 32767
r0025
40344
Tensione del circuito intermedio
R
V
1
0 … 32767
r0026
40345
Valore attuale di corrente
R
A
100
0 … 163.83
r0027
40346
Valore attuale della coppia
R
Nm
100
40347
Valore attuale della potenza attiva
R
kW
100
40348
Consumo di energia
R
kWh
1
40349
Priorità di comando
R
--
1
- 327.68 … 327.67 r0024
- 325.00 … 325.00 r0031
0 … 327.67
r0032
0 … 32767
r0039
HAND
AUTO
r0807
Diagnostica degli errori
40400
Numero di anomalia, indice 0
R
--
1
0 … 32767
r0947 [0]
40401
Numero di anomalia, indice 1
R
--
1
0 … 32767
r0947 [1]
40402
Numero di anomalia, indice 2
R
--
1
0 … 32767
r0947 [2]
40403
Numero di anomalia, indice 2
R
--
1
0 … 32767
r0947 [3]
40404
Numero di anomalia, indice 3
R
--
1
0 … 32767
r0947 [4]
40405
Numero di anomalia, indice 4
R
--
1
0 … 32767
r0947 [5]
40406
Numero di anomalia, indice 5
R
--
1
0 … 32767
r0947 [6]
40407
Numero di anomalia, indice 6
R
--
1
0 … 32767
r0947 [7]
40408
Numero di avviso
R
--
1
0 …32767
r2110 [0]
40499
Codice PRM ERROR
R
--
1
0 …99
--
0…1
p2200, r2349.0
Regolatore PID
40500
Regolatore PID, abilitazione
R/W
--
1
40501
Regolatore PID MOP
R/W
%
100
-200.0 … 200.0
p2240
Adattamento regolatore PID
40510
Costante di tempo per il filtro del valore
attuale del regolatore PID
R/W
--
100
0.00 … 60.0
p2265
40511
Fattore di scala per il valore attuale del
regolatore PID
R/W
%
100
0.00 … 500.00
p2269
40512
Regolatore PID del guadagno
proporzionale
R/W
--
1000
0.000 … 65.000
p2280
40513
Tempo dell'azione integratrice del
regolatore PID
R/W
s
1
0 … 60
p2285
40514
Costante di tempo della parte D del
regolatore PID
R/W
--
1
0 … 60
p2274
40515
Limitazione max del regolatore PID
R/W
%
100
-200.0 … 200.0
p2291
40516
Limitazione min. del regolatore PID
R/W
%
100
-200.0 … 200.0
p2292
Diagnostica PID
40520
Valore di riferimento in base al
generatore di rampa del MOP del
regolatore PID interno
R
%
100
-100.0 … 100.0
r2250
40521
Valore attuale del regolatore PID dopo
filtri
R
%
100
-100.0 … 100.0
r2266
40522
Segnale di uscita del regolatore PID
R
%
100
-100.0 … 100.0
r2294
Convertitori con le Control Unit CU240B-2 e CU240E-2
164
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
7.6.3.4
Accesso in scrittura e lettura tramite FC 03 e FC 06
Codici funzione utilizzati
Per lo scambio di dati tra master e slave vengono usati codici funzione predefiniti nella
comunicazione tramite Modbus.
La Control Unit utilizza il Modbus Function Code 03, FC 03, (Read Holding Registers) per la
lettura e il Modbus Function Code 06, FC 06 (Preset Single Register) per la scrittura.
Struttura di una richiesta di lettura tramite il Modbus Function Code 03 (FC 03)
Come indirizzo iniziale è ammesso ogni indirizzo di registro valido.
Tramite FC 03 il controllore può interrogare più di un registro con una richiesta. Il numero del
registro richiamato è contenuto nei byte 4 e 5 della richiesta di lettura.
Tabella 7- 14 Richieste di lettura non valide
Richiesta di lettura
Reazione del convertitore
Indirizzo di registro non valido
Exception Code 02 (indirizzo dati non valido)
Lettura di un "Write Only Register"
Telegramma in cui tutti i valori sono impostati a 0.
Lettura di un registro riservato
Il controllore indirizza più di 125 registri
Exception Code 03 (valore dati non valido)
L'indirizzo iniziale e il numero di registri si trovano al di fuori
di un blocco di registri definito
Exception Code 02 (indirizzo dati non valido)
Tabella 7- 15 Struttura di una richiesta di lettura per il numero di slave 17
Esempio
11
03
00
6D
00
02
xx
xx
h
h
h
h
h
h
h
h
Byte
Descrizione
0
1
2
3
4
5
6
7
Slave Address
Function Code
Indirizzo iniziale
Indirizzo iniziale
Numero di registri
Numero di registri
CRC "Low"
CRC "High"
registro "High" (registro 40110)
registro "Low"
"High" (2 registri: 40110; 40111)
"Low"
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
165
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
La risposta restituisce il corrispondente set di dati:
Tabella 7- 16 Risposta dello slave alla richiesta di lettura
Esempio
11
03
04
11
22
33
44
xx
xx
h
h
h
h
h
h
h
h
h
Byte
Descrizione
0
1
2
3
4
5
6
7
8
Slave Address
Function Code
Numero di byte (4 byte vengono restituiti)
Dati del primo registro "High"
Dati del primo registro "Low"
Dati del secondo registro "High"
Dati del secondo registro "Low"
CRC "Low"
CRC "High"
Struttura di una richiesta di scrittura tramite il Modbus Function Code 06 (FC 06)
L'indirizzo iniziale è l'indirizzo del registro di holding.
Tramite FC 06 è possibile far intervenire, mediante una richiesta, sempre solo un registro. I
byte 4 e 5 della richiesta di scrittura contengono il valore che viene scritto nel registro
interrogato.
Tabella 7- 17 Richiesta di scrittura e reazione del convertitore
Richiesta di scrittura
Reazione del convertitore
Indirizzo errato (non esiste un indirizzo del registro di
holding)
Exception Code 02
Scrittura in un "Read Only"
Telegramma di errore Modbus (Exception Code 04 - device
failure)
Scrittura in un registro riservato
In caso di indirizzo errato (non esiste alcun indirizzo del registro di holding) viene restituito il
codice di eccezione 02 (indirizzo dati non valido). Al tentativo di scrivere un "read only" o in
un registro riservato, viene risposto con un telegramma di errore Modbus (codice di
eccezione 4, guasto dispositivo). In questo caso il registro di holding 40499 consente di
leggere il codice di errore dettagliato interno all'azionamento che è stato generato durante
l'ultimo accesso ai parametri tramite il registro di holding.
Convertitori con le Control Unit CU240B-2 e CU240E-2
166
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Tabella 7- 18 Struttura di una richiesta di scrittura per il numero di slave 17
Esempio
11
06
00
63
55
66
xx
xx
h
h
h
h
h
h
h
h
Byte
Descrizione
0
1
2
3
4
5
6
7
Slave Address
Function Code
Indirizzo iniziale registro "High" (registro di scrittura
40100)
Indirizzo iniziale registro "Low"
Dati di registro "High"
Dati di registro "Low"
CRC "Low"
CRC "High"
La risposta restituisce l'indirizzo del registro (byte 2 e 3) e il valore (byte 4 e 5) che il
controllore ha scritto nel registro.
Tabella 7- 19 Risposta dello slave alla richiesta di scrittura
Esempio
11
06
00
63
55
66
xx
xx
7.6.3.5
h
h
h
h
h
h
h
h
Byte
Descrizione
0
1
2
3
4
5
6
7
Slave Address
Function Code
Indirizzo iniziale registro "High"
Indirizzo iniziale registro "Low"
Dati di registro "High"
Dati di registro "Low"
CRC "Low"
CRC "High"
Sequenza di comunicazione
Sequenza di comunicazione in condizioni normali
In condizioni normali il master invia un telegramma ad uno slave (area di indirizzi 1 … 247).
Lo slave restituisce al master un telegramma di risposta, che contiene il codice funzione in
modo speculare; lo slave imposta il proprio indirizzo nel frame del messaggio, per mezzo del
quale lo slave si identifica nel master.
Lo slave elabora solo job e telegrammi direttamente indirizzati al medesimo.
Errori di comunicazione
Qualora lo slave riconosca un errore di comunicazione alla ricezione (parità, CRC), non invia
alcuna risposta al master (e potrebbe verificarsi un "timeout del valore di riferimento").
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
167
Configurazione del bus di campo
7.6 Comunicazione tramite RS485
Errori logici
Qualora lo slave riconosca un errore logico all'interno di una richiesta, risponde al master
con una "risposta di eccezione". Nella risposta lo slave imposta il bit più significativo del
codice funzione a 1. Se ad es. non riceve dal master un codice funzione supportato, lo slave
risponde con una "Exception Response" con il codice 01 (Illegal Function Code).
Tabella 7- 20 Panoramica dei codici di eccezione
Codice di
eccezione
Nome Modbus
Nota
01
Codice funzione non valido Allo slave è stato inviato un codice funzione sconosciuto
(non supportato).
02
Indirizzo dati non valido
È stato richiesto un indirizzo non valido.
03
Valore dati non valido
È stato riconosciuto un valore dei dati non valido.
04
Errore server
Lo slave si è interrotto durante l'elaborazione.
Tempo massimo di elaborazione, p2024[0]
Il tempo di risposta dello slave è il tempo in cui il master Modbus attende una risposta a una
richiesta. Impostare il tempo di risposta dello slave (p2024[0] nel convertitore) a un valore
identico nel master e nello slave.
Tempo di sorveglianza dati di processo (timeout del valore di riferimento), p2040
Modbus emette l'allarme "Timeout del valore di riferimento" (F1910) se è impostato
p2040 > 0 ms e se in questo lasso di tempo non vengono richiesti dati di processo.
L'allarme "Timeout del valore di riferimento" vale solo per l'accesso ai dati di processo
(40100, 40101, 40110, 40111). L'allarme "Timeout del valore di riferimento" non viene
generato per i dati dei parametri (40200 … 40522).
Nota
Adattare il tempo (impostazione di fabbrica = 100 ms) in funzione del numero di slave e della
velocità di trasmissione impostata sul bus.
Convertitori con le Control Unit CU240B-2 e CU240E-2
168
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.1
Figura 8-1
8
Panoramica delle funzioni del convertitore
Panoramica delle funzioni del convertitore
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
169
Impostazione delle funzioni
8.1 Panoramica delle funzioni del convertitore
Funzioni necessarie per tutte le applicazioni
Funzioni necessarie solo per applicazioni specifiche
Le funzioni necessarie per tutte le applicazioni sono
rappresentate su sfondo scuro nella figura precedente.
Le funzioni i cui parametri devono essere adattati solo se
necessario sono rappresentate su sfondo bianco nella figura
precedente.
Queste funzioni vanno impostate nella messa in servizio di
base; ciò permette, in molti casi, il funzionamento del
motore senza ulteriori impostazioni.
Il controllo da convertitore ha la priorità su tutte
le altre funzioni del convertitore. Questa
funzione determina anche il modo in cui il
convertitore reagisce ai comandi del controllore
sovraordinato.
Le funzioni di protezione impediscono che si
verifichino danni al motore, al convertitore e alla
macchina operatrice, ad es. tramite il controllo
della temperatura o la sorveglianza della
coppia.
Controllo da convertitore (Pagina 171)
Funzioni di protezione (Pagina 206)
I comandi del controllore sovraordinato giungono
al convertitore attraverso gli ingressi digitali o il
bus di campo.
I messaggi di stato forniscono segnali sulle
uscite della Control Unit o tramite il bus di
campo, ad es. il numero di giri attuale del
motore o il messaggio di anomalia del
convertitore.
Adattamento della morsettiera (Pagina 89)
Configurazione del bus di campo (Pagina 103)
Adattamento della morsettiera (Pagina 89)
Configurazione del bus di campo (Pagina 103)
È necessario definire un valore di riferimento
che, ad es., definisce il numero di giri del
motore.
Valori di riferimento (Pagina 182)
Le funzioni adatte all'applicazione comandano,
ad es., un freno di stazionamento motore o
consentono la regolazione sovraordinata della
pressione o della temperatura con il regolatore
PID.
Funzioni specifiche dell'applicazione
(Pagina 213)
La preparazione del valore di riferimento
impedisce salti di velocità tramite il generatore di
rampa e limita il numero di giri a un valore
massimo ammesso.
Preparazione del valore di riferimento
(Pagina 188)
Le funzioni di sicurezza soddisfano requisiti
maggiori relativi alla sicurezza funzionale
dell'azionamento.
Funzione di sicurezza Safe Torque Off (STO)
(Pagina 253)
La regolazione del motore verifica che il motore
rispetti il valore di riferimento del numero di giri.
Si può selezionare la regolazione del numero di
giri o il controllo U/f.
Regolazione motore (Pagina 196)
Convertitori con le Control Unit CU240B-2 e CU240E-2
170
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.2 Controllo da convertitore
8.2
Controllo da convertitore
8.2.1
Inserzione/disinserzione del motore
Una volta inserita la tensione di alimentazione, normalmente il
convertitore passa allo stato "pronto all'inserzione". In questo
stato il convertitore attende il comando di inserzione del motore:
• Con il comando ON il convertitore inserisce il motore. Il
convertitore passa allo stato "Funzionamento".
• Dopo il comando OFF1 il convertitore frena il motore con il
tempo di decelerazione del generatore di rampa. Al
raggiungimento dello stato di fermo, il convertitore
disinserisce il motore. Il convertitore è di nuovo "pronto
all'inserzione".
Stati del convertitore e comando per l'inserzione e la disinserzione del motore
Oltre al comando OFF1, vi sono altri comandi per la disinserzione del motore:
● OFF2 - il convertitore disinserisce immediatamente il motore senza prima frenarlo.
● OFF3 - questo comando significa "Arresto rapido". Dopo un comando OFF3 il
convertitore frena il motore con il tempo di decelerazione OFF3. Dopo il raggiungimento
del fermo, il convertitore disinserisce il motore.
Questo comando viene utilizzato in genere per situazioni di funzionamento eccezionali,
nelle quali è necessario frenare il motore in modo estremamente rapido. L'applicazione
tipica è il caso in cui occorre evitare una collisione.
La seguente figura mostra il controllo sequenziale del convertitore in fase di inserzione e di
disinserzione del motore.
Figura 8-2
Panoramica degli stati del convertitore
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
171
Impostazione delle funzioni
8.2 Controllo da convertitore
Tabella 8- 1
Spiegazione degli stati del convertitore
Stato
Spiegazione
Blocco inserzione
(S1)
In questo stato il convertitore non reagisce al comando ON. Il convertitore passa
in questo stato nelle seguenti condizioni:
•
Il comando ON era attivo all'inserzione del convertitore.
Eccezione: con l'inserzione automatica attiva, il comando deve essere attivo
dopo il collegamento della tensione di alimentazione.
•
OFF2 o OFF3 è selezionato.
Pronto
all'inserzione (S2)
Questo stato è il presupposto per poter accendere il motore.
Pronto al
funzionamento
(S3)
Il convertitore attende l'abilitazione al funzionamento.
Funzionamento
(S4)
Il motore è inserito.
Arresto normale
(S5a)
Il motore è stato disinserito con OFF1 e frena con il tempo di decelerazione del
generatore di rampa.
Arresto rapido
(S5b)
Il motore è stato disinserito con OFF3 e frena con il tempo di decelerazione
OFF3.
Se il convertitore è controllato tramite un bus di campo, è necessario impostare
l'abilitazione al funzionamento in un bit della parola di comando.
Se il convertitore è controllato esclusivamente tramite gli ingressi digitali,
l'abilitazione al funzionamento è impostata automaticamente in fabbrica.
Convertitori con le Control Unit CU240B-2 e CU240E-2
172
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.2 Controllo da convertitore
8.2.2
Controllo del convertitore tramite ingressi digitali
Esistono cinque metodi per comandare il motore tramite gli ingressi digitali.
Tabella 8- 2 Controllo a due fili e controllo a tre fili
Comportamento del motore
Comandi di controllo
Applicazioni
tipiche
Controllo a due fili, metodo 1
Azionamento "in
locale" nel settore
della tecnica dei
trasporti
industriali.
1. Inserzione/disinserzione del motore
(ON/OFF1).
2. Cambiamento del senso di rotazione
del motore (inversione).
Controllo a due fili, metodo 2 e
controllo a due fili, metodo 3
1. Inserzione/disinserzione del motore
(ON/OFF1), rotazione destrorsa.
2. Inserzione/disinserzione del motore
(ON/OFF1), rotazione sinistrorsa.
Controllo a tre fili, metodo 1
1. Abilitazione dell'inserzione del motore
e disinserzione del motore (OFF1).
2. Inserzione del motore (ON), rotazione
destrorsa.
3. Inserzione del motore (ON), rotazione
sinistrorsa.
Controllo a tre fili, metodo 2
Azionamenti per
movimento
orizzontale con
comando tramite
manipolatore a
leva
Azionamenti per
movimento
orizzontale con
comando tramite
manipolatore a
leva
-
1. Abilitazione dell'inserzione del motore
e disinserzione del motore (OFF1).
2. Inserzione del motore (ON).
3. Cambiamento del senso di rotazione
del motore (inversione).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
173
Impostazione delle funzioni
8.2 Controllo da convertitore
8.2.3
Controllo a due fili, metodo 1
Si inserisce e si disinserisce il motore con un comando di controllo (ON/OFF1). Con un
secondo comando di controllo si cambia la direzione di rotazione del motore (inversione).
Figura 8-3
Controllo a due fili, metodo 1
Tabella 8- 3
Tabella delle funzioni
ON / OFF1
Inversione
0
0
Funzione
OFF1: il motore si arresta.
0
1
OFF1: il motore si arresta.
1
0
ON: rotazione destrorsa del motore.
1
1
ON: rotazione sinistrorsa del motore.
Parametri
Descrizione
p0015 = 12
Macro apparecchio di azionamento (impostazione di fabbrica per i
convertitori senza interfaccia PROFIBUS)
Controllo del motore tramite gli ingressi
digitali del convertitore:
DI 0
DI 1
ON / OFF1
Inversione
Impostazione avanzata
Interconnessione dei comandi di controllo con ingressi digitali a scelta (DI x).
p0840[0 … n] = 722.x
BI: ON/OFF1 (ON/OFF1)
p1113[0 … n] = 722.x
BI: inversione del valore di riferimento (inversione)
Esempio
p0840 = 722.3
DI 3: ON/OFF1
Vedere anche la sezione Ingressi digitali (Pagina 90).
Convertitori con le Control Unit CU240B-2 e CU240E-2
174
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.2 Controllo da convertitore
8.2.4
Controllo a due fili, metodo 2
Si inserisce e si disinserisce il motore con un comando di controllo (ON/OFF1) e si seleziona
contemporaneamente la direzione destrorsa del motore. Con il secondo comando di
controllo si inserisce e si disinserisce il motore, ma si seleziona la direzione sinistrorsa del
motore.
Il convertitore accetta un nuovo comando di controllo solo in stato di fermo del motore.
Figura 8-4
Controllo a due fili, metodo 2
Tabella 8- 4
Tabella delle funzioni
ON/OFF1,
rotazione
destrorsa
ON/OFF1,
rotazione
sinistrorsa
Funzione
0
0
OFF1: il motore si arresta.
1
0
ON: rotazione destrorsa del motore.
0
1
ON: rotazione sinistrorsa del motore.
1
1
ON: la direzione di rotazione del motore si basa sul segnale che
assume per primo lo stato "1".
Parametri
Descrizione
p0015 = 17
Macro apparecchio di azionamento
Controllo del motore tramite gli
ingressi digitali del convertitore:
DI 0
DI 1
ON/OFF1,
rotazione
destrorsa
ON/OFF1,
rotazione
sinistrorsa
Impostazione avanzata
Interconnessione dei comandi di controllo con ingressi digitali a scelta (DI x).
p3330[0 … n] = 722.x
BI: 2-3-WIRE Control Command 1 (ON/OFF1 rotazione destrorsa)
p3331[0 … n] = 722.x
BI: 2-3-WIRE Control Command 2 (ON/OFF1 rotazione sinistrorsa)
Esempio
p3331 = 722.0
DI 0: ON/OFF1 rotazione sinistrorsa
Vedere anche la sezione Ingressi digitali (Pagina 90).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
175
Impostazione delle funzioni
8.2 Controllo da convertitore
8.2.5
Controllo a due fili, metodo 3
Si inserisce e si disinserisce il motore con un comando di controllo (ON/OFF1) e si seleziona
contemporaneamente la direzione destrorsa del motore. Con il secondo comando di
controllo si inserisce e si disinserisce il motore, ma si seleziona la direzione sinistrorsa del
motore.
A differenza del metodo 2, il convertitore accetta i comandi di controllo in qualsiasi momento,
indipendentemente dal numero di giri del motore.
Figura 8-5
Controllo a due fili, metodo 3
Tabella 8- 5
Tabella delle funzioni
Rotazione destrorsa
ON/OFF1, rotazione
sinistrorsa
Funzione
0
0
OFF1: il motore si arresta.
1
0
ON: rotazione destrorsa del motore.
0
1
ON: rotazione sinistrorsa del motore.
1
1
OFF1: il motore si arresta.
Parametri
Descrizione
p0015 = 18
Macro apparecchio di azionamento
Controllo del motore tramite gli
ingressi digitali del convertitore:
DI 0
DI 1
ON/OFF1,
rotazione
destrorsa
ON/OFF1,
rotazione
sinistrorsa
Impostazione avanzata
Interconnessione dei comandi di controllo con ingressi digitali a scelta (DI x).
p3330[0 … n] = 722.x
BI: 2-3-WIRE Control Command 1 (ON/OFF1 rotazione destrorsa)
p3331[0 … n] = 722.x
BI: 2-3-WIRE Control Command 2 (ON/OFF1 rotazione sinistrorsa)
Esempio
p3331[0 … n] = 722.2
DI 2: ON/OFF1 rotazione sinistrorsa
Vedere anche la sezione Ingressi digitali (Pagina 90).
Convertitori con le Control Unit CU240B-2 e CU240E-2
176
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.2 Controllo da convertitore
8.2.6
Controllo a tre fili, metodo 1
Con un comando di controllo si impartisce l'abilitazione per gli altri due comandi di controllo.
Rimuovendo l'abilitazione si provoca la disinserzione del motore (OFF1).
Con il fronte positivo del secondo comando di controllo si commuta la direzione di rotazione
del motore alla rotazione destrorsa. Se il motore è ancora disinserito, lo si inserisce (ON).
Con il fronte positivo del terzo comando di controllo si commuta la direzione di rotazione del
motore alla rotazione sinistrorsa. Se il motore è ancora disinserito, lo si inserisce (ON).
Figura 8-6
Controllo a tre fili, metodo 1
Tabella 8- 6
Tabella delle funzioni
Abilitazione / OFF1
ON rotazione
destrorsa
ON rotazione
sinistrorsa
0
0o1
0o1
1
0→1
0
1
0
0→1
1
1
1
OFF1: il motore si arresta.
ON: rotazione destrorsa del motore.
ON: rotazione sinistrorsa del
motore.
OFF1: il motore si arresta.
Parametri
Descrizione
p0015 = 19
Macro apparecchio di azionamento
Controllo del motore tramite
gli ingressi digitali del
convertitore:
Funzione
DI 0
DI 1
DI 2
Abilitazione /
OFF1
ON rotazione
destrorsa
ON rotazione
sinistrorsa
Impostazione avanzata
Interconnessione dei comandi di controllo con ingressi digitali a scelta (DI x).
p3330[0 … n] = 722.x
BI: 2-3-WIRE Control Command 1 (Abilitazione / OFF1)
p3331[0 … n] = 722.x
BI: 2-3-WIRE Control Command 2 (ON rotazione destrorsa)
p3332[0 … n] = 722.x
BI: 2-3-WIRE Control Command 3 (ON rotazione sinistrorsa)
Esempio
p3332 = 722.0
DI 0: ON rotazione sinistrorsa.
Vedere anche la sezione Ingressi digitali (Pagina 90).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
177
Impostazione delle funzioni
8.2 Controllo da convertitore
8.2.7
Controllo a tre fili, metodo 2
Con un comando di controllo si impartisce l'abilitazione per gli altri due comandi di controllo.
Rimuovendo l'abilitazione si provoca la disinserzione del motore (OFF1).
Con il fronte positivo del secondo comando di controllo si inserisce il motore (ON).
Il terzo comando di controllo determina la direzione di rotazione del motore (inversione).
Figura 8-7
Controllo a tre fili, metodo 2
Tabella 8- 7
Tabella delle funzioni
Abilitazione /
OFF1
ON
Inversione
Funzione
0
0o1
0o1
1
0→1
0
ON: rotazione destrorsa del motore.
1
0→1
1
ON: rotazione sinistrorsa del motore.
OFF1: il motore si arresta.
Parametri
Descrizione
p0015 = 20
Macro apparecchio di azionamento
Controllo del motore tramite
gli ingressi digitali del
convertitore:
DI 0
DI 1
DI 2
Abilitazione /
OFF1
ON
Inversione
Impostazione avanzata
Interconnessione dei comandi di controllo con ingressi digitali a scelta (DI x).
p3330[0 … n] = 722.x
BI: 2-3-WIRE Control Command 1 (Abilitazione / OFF1)
p3331[0 … n] = 722.x
BI: 2-3-WIRE Control Command 2 (ON)
p3332[0 … n] = 722.x
BI: 2-3-WIRE Control Command 3 (inversione)
Esempio
p3331 = 722.0
DI 0: ON
Vedere anche la sezione Ingressi digitali (Pagina 90).
Convertitori con le Control Unit CU240B-2 e CU240E-2
178
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.2 Controllo da convertitore
8.2.8
Funzionamento a impulsi del motore (funzione JOG)
Normalmente il "Funzionamento a impulsi" è utilizzato per l'avanzamento lento di un
componente della macchina, ad es. un nastro trasportatore.
Con il "Funzionamento a impulsi" il motore viene inserito e disinserito tramite un ingresso
digitale. Dopo l'inserzione, il motore accelera al valore di riferimento per il funzionamento a
impulsi. Esistono due diversi valori di riferimento, ad es. per la rotazione sinistrorsa e la
rotazione destrorsa del motore.
Il generatore di rampa sul valore di riferimento è lo stesso del comando ON/OFF1.
Figura 8-8
"Funzionamento a impulsi" del motore
Prima di impartire il comando di controllo per il "Funzionamento a
impulsi", il convertitore deve essere pronto all'inserzione. Se il
motore è già pronto all'inserzione, il comando "Funzionamento a
impulsi" non ha effetto.
Impostazione del funzionamento a impulsi
Parametri
Descrizione
p1058
Funzionamento a impulsi 1 valore di riferimento del numero di giri (impostazione di fabbrica
150 1/min)
p1059
Funzionamento a impulsi 2 valore di riferimento del numero di giri (impostazione di fabbrica 150 1/min)
p1082
Numero di giri massimo (impostazione di fabbrica 1500 1/min)
p1110
Blocco direzione negativa
=0: Senso di rotazione negativo abilitato
p1111
=0: Senso di rotazione positivo abilitato
p1113
=1: Senso di rotazione negativo bloccato
Blocco direzione positiva
=1: Senso di rotazione positivo bloccato
Inversione del valore di riferimento
=0: Valore di riferimento non invertito
=1: Valore di riferimento invertito
p1120
Generatore di rampa, tempo di accelerazione (impostazione di fabbrica 10 s)
p1121
Generatore di rampa, tempo di decelerazione (impostazione di fabbrica 10 s)
p1055 = 722.0
Funzionamento a impulsi bit 0: selezione del funzionamento a impulsi 1 tramite l'ingresso
digitale 0
p1056 = 722.1
Funzionamento a impulsi bit 1: selezione del funzionamento a impulsi 2 tramite l'ingresso
digitale 1
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
179
Impostazione delle funzioni
8.2 Controllo da convertitore
8.2.9
Commutazione del controllo da convertitore (set di dati di comando)
In alcune applicazioni è necessario che il convertitore possa essere comandato da più
controlli sovraordinati.
Esempio: commutazione dal funzionamento automatico a quello manuale
Si può comandare un motore da un controllo centrale tramite il bus di campo oppure
mediante un interruttore locale.
Set di dati di comando (Control Data Set, CDS)
È possibile impostare il controllo da convertitore in diversi modi e commutare da
un'impostazione all'altra. Il convertitore può ad esempio essere comandato, come descritto
sopra, tramite il bus di campo o la morsettiera.
Le impostazioni del convertitore che fanno
parte di un tipo di controllo specifico del
convertitore vengono definite set di dati di
comando.
Figura 8-9
Diverso controllo da convertitore
con più set di dati di comando
(CDS)
Si seleziona il set di dati di comando tramite il parametro p0810. Occorre inoltre
interconnettere il parametro p0810 con un comando di controllo a scelta, ad esempio un
ingresso digitale.
Figura 8-10
Esempio: commutazione dal controllo tramite morsettiera al controllo tramite PROFIBUS
o PROFINET
Convertitori con le Control Unit CU240B-2 e CU240E-2
180
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.2 Controllo da convertitore
L'interconnessione descritta nell'esempio precedente si ottiene quando nella messa in
servizio di base sono state configurate le interfacce del convertitore con p0015 = 7, vedere
anche la sezione Selezione delle impostazioni adeguate delle interfacce (Pagina 55).
Il Manuale delle liste contiene una panoramica di tutti i parametri che fanno parte dei set di
dati di comando.
Nota
Il tempo di commutazione del set di dati di comando è circa 4 ms.
Impostazioni avanzate
Se sono necessari più di due set di dati di comando, definire con il parametro p0170 il
numero di set di dati di comando (2, 3 o 4).
Tabella 8- 8
Definizione del numero di set di dati di comando
Parametri
Descrizione
p0010 = 15
Messa in serviz. azion.: Set di dati
p0170
Numero di set di dati di comando (Impostazione di fabbrica: 2)
p0170 = 2, 3 o 4
p0010 = 0
Messa in serviz. azion.: Pronto
r0050
Visualizzazione del numero del set di dati di comando correntemente attivo
In presenza di più di due set di dati di comando sono necessari due bit per poter effettuare
una selezione univoca.
Tabella 8- 9
Selezione set di dati di comando
Parametri
Descrizione
p0810
Selezione set di dati di comando CDS bit 0
p0811
Selezione set di dati di comando CDS bit 1
r0050
Visualizzazione del numero del set di dati di comando correntemente attivo
Per semplificare la messa in servizio di più set di dati di comando è disponibile una funzione
di copia.
Tabella 8- 10 Parametri per la copia dei set di dati di comando
Parametri
Descrizione
p0809[0]
Numero del set di dati di comando che viene copiato (sorgente)
p0809[1]
Numero del set di dati di comando nel quale deve essere effettuata la copia
(destinazione)
p0809[2] = 1
Viene avviata l'operazione di copia
Al termine della copia il convertitore imposta p0809[2] = 0.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
181
Impostazione delle funzioni
8.3 Valori di riferimento
8.3
Valori di riferimento
8.3.1
Panoramica
Il convertitore ottiene il valore di riferimento principale tramite la sorgente del valore di
riferimento. Il valore di riferimento principale imposta normalmente il numero di giri del
motore.
Figura 8-11
Sorgenti del valore di riferimento del convertitore
Per la sorgente del valore di riferimento principale esistono le seguenti possibilità:
●
●
●
●
Ingresso analogico del convertitore.
Interfaccia del bus di campo del convertitore.
Potenziometro motore emulato nel convertitore.
Valori di riferimento fissi memorizzati nel convertitore.
Le possibilità di selezione disponibili per la sorgente del valore di riferimento aggiuntivo sono
le stesse.
Il controllo da convertitore commuta dal valore di riferimento principale ad altri valori di
riferimento nelle seguenti condizioni:
● Con un regolatore attivo l'uscita del regolatore imposta il numero di giri del motore.
● Con un funzionamento a impulsi attivo.
● Con il controllore di un Operator Panel o del tool per PC STARTER.
Nella messa in servizio di base è già stata selezionata una sorgente del valore di riferimento.
Vedere anche la sezione: Selezione delle impostazioni adeguate delle interfacce
(Pagina 55).
Questa impostazione può tuttavia essere modificata. Le pagine seguenti contengono una
descrizione dettagliata delle sorgenti del valore di riferimento.
Convertitori con le Control Unit CU240B-2 e CU240E-2
182
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.3 Valori di riferimento
8.3.2
Ingresso analogico come sorgente del valore di riferimento
Interconnessione dell'ingresso analogico
Se è stata selezionata una preimpostazione senza funzione dell'ingresso analogico, è
necessario interconnettere il parametro del valore di riferimento principale con un ingresso
analogico.
Figura 8-12
Esempio: ingresso analogico 0 come sorgente del valore di riferimento
Tabella 8- 11 Impostazione con ingresso analogico 0 come sorgente del valore di riferimento
Parametri
Nota
p1070 = 755[0]
Valore di riferimento principale
Collegare il valore di riferimento principale con l'ingresso analogico 0
p1075 = 755[0]
Valore di riferimento aggiuntivo
Collegare il valore di riferimento aggiuntivo con l'ingresso analogico 0
È necessario adattare l'ingresso analogico al segnale collegato, ad es. ± 10 V o 4 … 20 mA.
Per maggiori informazioni vedere la sezione: Ingressi analogici (Pagina 94).
8.3.3
Impostazione del numero di giri del motore tramite il bus di campo
Per impostare il valore di riferimento tramite il bus di campo, è necessario collegare il
convertitore a un controllore sovraordinato. Per maggiori informazioni vedere il capitolo
Configurazione del bus di campo (Pagina 103).
Interconnessione del bus di campo con il valore di riferimento principale
Figura 8-13
Bus di campo come sorgente del valore di riferimento
La maggior parte dei telegrammi standard riceve il valore di riferimento del numero di giri
come secondo dato di processo PZD2.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
183
Impostazione delle funzioni
8.3 Valori di riferimento
Tabella 8- 12 Impostazione del bus di campo come sorgente del valore di riferimento
8.3.4
Parametri
Nota
p1070 = 2050[1]
Valore di riferimento principale
Interconnettere il valore di riferimento principale con il dato di processo PZD2 del
bus di campo.
p1075 = 2050[1]
Valore di riferimento aggiuntivo
Interconnettere il valore di riferimento aggiuntivo con il dato di processo PZD2
del bus di campo.
Potenziometro motore come sorgente del valore di riferimento
La funzione "Potenziometro motore" simula un potenziometro elettromeccanico. Il valore di
uscita del potenziometro motore può essere impostato in modo continuo tramite i segnali di
controllo "più alto" e "più basso".
Interconnessione del potenziometro motore (MOP) con la sorgente del valore di riferimento
Figura 8-14
Potenziometro motore come sorgente del valore di riferimento
Tabella 8- 13 Impostazione di base del potenziometro motore
Parametri
Descrizione
p1047
Tempo di accelerazione MOP(impostazione di fabbrica 10 s)
p1048
Tempo di decelerazione MOP(impostazione di fabbrica 10 s)
p1040
Valore di avvio del MOP (impostazione di fabbrica 0 1/min)
Determina il valore di avvio [1/min] che diventa attivo all'inserzione del motore.
Tabella 8- 14 Impostazione del MOP come sorgente del valore di riferimento
Parametri
Nota
p1070 = 1050
Valore di riferimento principale
Collegare il valore di riferimento principale con il MOP.
p1035
Potenziometro motore, valore di riferimento superiore (impostazione di fabbrica 0)
Collegare questo segnale, ad es. con un ingresso digitale a scelta:
p1035 = 722.1 (ingresso digitale 1)
p1036
Potenziometro motore, valore di riferimento inferiore (impostazione di fabbrica 0)
Collegare questo segnale, ad es. con un ingresso digitale a scelta.
Convertitori con le Control Unit CU240B-2 e CU240E-2
184
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.3 Valori di riferimento
Adattamento del comportamento del potenziometro motore
Figura 8-15
Diagramma delle funzioni del potenziometro motore
Tabella 8- 15 Impostazione avanzata del potenziometro motore
Parametri
Descrizione
p1030
Configurazione del MOP (impostazione di fabbrica 00110 Bin)
Valore del parametro con quattro bit indipendenti impostabili 00 … 03
Bit 00: Memorizzazione del valore di riferimento dopo lo spegnimento del motore
0: Dopo l'inserzione del motore viene impostato p1040 come valore di riferimento
1: Il valore di riferimento viene memorizzato allo spegnimento del motore e ripristinato
all'inserzione del motore
Bit 01: Configurazione del generatore di rampa nel funzionamento automatico
(segnale 1 tramite BI: p1041)
0: Senza generatore di rampa nel funzionamento automatico (tempo di
accelerazione/decelerazione = 0)
1: Con generatore di rampa nel funzionamento automatico
Nel funzionamento manuale (segnale 0 tramite BI: p1041) il generatore di rampa è
sempre attivo
Bit 02: Configurazione dell'arrotondamento iniziale
0: Senza arrotondamento iniziale
1: Con arrotondamento iniziale. Con l'arrotondamento iniziale è possibile effettuare
un'impostazione fine di piccole modifiche del valore di riferimento
Bit 03: Memorizzazione del valore di riferimento a prova di mancanza di rete
0: Nessuna memorizzazione a prova di mancanza di rete
1: Il valore di riferimento viene memorizzato in caso di mancanza di rete (bei Bit 00 =
1)
Bit 04: Generatore di rampa sempre attivo
0: Il valore di riferimento viene calcolato solo abilitando gli impulsi
1: Il valore di riferimento viene calcolato indipendentemente dall'abilitazione impulsi.
p1037
Numero di giri massimo del MOP (impostazione di fabbrica 0 1/min)
Impostazione automatica durante la messa in servizio
p1038
Numero di giri minimo del MOP (impostazione di fabbrica 0 1/min)
Impostazione automatica durante la messa in servizio
p1044
Valore predefinito del MOP (impostazione di fabbrica 0)
Sorgente del segnale per il valore predefinito.
Per ulteriori informazioni sul potenziometro motore vedere lo schema logico 3020 del
Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
185
Impostazione delle funzioni
8.3 Valori di riferimento
8.3.5
Numero di giri fisso come sorgente del valore di riferimento
In molte applicazioni è sufficiente far funzionare il motore a un numero di giri costante dopo
l'inserzione oppure commutare tra numeri di giri diversi.
Esempio: dopo l'inserzione un nastro trasportatore avanza solo con due diverse velocità.
Interconnessione dei numeri di giri fissi con il valore di riferimento principale
Figura 8-16
Numeri di giri fissi come sorgente del valore di riferimento
Tabella 8- 16 Impostazione del numero di giri fisso come sorgente del valore di riferimento
Parametri
Nota
p1070 = 1024
Valore di riferimento principale
Collegare il valore di riferimento principale con i numeri di giri fissi.
p1075 = 1024
Valore di riferimento aggiuntivo
Collegare il valore di riferimento aggiuntivo con i numeri di giri fissi.
Selezione diretta o binaria del valore di riferimento fisso
Il convertitore offre fino a 16 diversi valori di riferimento fissi. Il controllore sovraordinato
seleziona i valori di riferimento fissi corretti tramite gli ingressi digitali o il bus di campo.
Il convertitore distingue due metodi per la selezione dei valori di riferimento fissi:
1. Selezione diretta:
Vengono impostati quattro diversi valori di riferimento fissi. Aggiungendo uno o più valori
di riferimento fissi tra i quattro impostati, si ottengono fino a 16 diversi valori di riferimento
risultanti.
La selezione diretta è il metodo adatto per il controllo da convertitore tramite gli ingressi
digitali.
Per ulteriori informazioni sulla selezione diretta vedere lo schema logico 3011 del
Manuale delle liste.
2. Selezione binaria:
Vengono impostati 16 diversi valori di riferimento fissi. Combinando i quattro bit di
selezione viene selezionato uno di questi valori di riferimento fissi.
La selezione binaria è il metodo più indicato quando si controlla il convertitore tramite un
bus di campo.
Per ulteriori informazioni sulla selezione binaria vedere lo schema logico 3010 del
Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
186
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.3 Valori di riferimento
Figura 8-17
Schema logico semplificato con selezione diretta dei valori di riferimento fissi
Esempio: selezione diretta di due valori di riferimento fissi
Il motore deve funzionare nel modo seguente con due numeri di giri diversi:
● Il segnale sull'ingresso digitale 0 inserisce il motore e lo accelera a 300 1/min.
● Il segnale sull'ingresso 1 accelera il motore a 2000 1/min.
Tabella 8- 17 Impostazioni per l'esempio
Parametri
Descrizione
p1001 = 300.000
Valore di riferimento fisso del numero di giri 1 in [1/min]
p1002 = 2000.000
Valore di riferimento fisso del numero di giri 2 in [1/min]
p0840 = 722.0
ON/OFF1: inserzione motore con ingresso digitale 0
p1070 = 1024
Valore di riferimento principale: interconnessione del valore di riferimento
principale con il valore di riferimento fisso del numero di giri.
p1020 = 722.0
Selezione del valore di riferimento fisso del numero di giri bit 0:
interconnessione del valore di riferimento fisso 1 con l'ingresso digitale 0
(DI 0).
p1021 = 722.1
Selezione del valore di riferimento fisso del numero di giri bit 1:
interconnessione del valore di riferimento fisso 2 con DI 1.
p1016 = 1
Modalità valore di riferimento fisso del numero di giri: selezione diretta dei
valori di riferimento fissi.
Tabella 8- 18 Valori di riferimento fissi risultanti per l'esempio precedente
Valore di riferimento fisso selezionato
tramite
Valore di riferimento risultante
DI 0 = LOW
Il motore si arresta
DI 0 = HIGH e DI 1 = LOW
300 1/min
DI 0 = HIGH e DI 1 = HIGH
2300 1/min
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
187
Impostazione delle funzioni
8.4 Preparazione del valore di riferimento
8.4
Preparazione del valore di riferimento
8.4.1
Panoramica della preparazione del valore di riferimento
Con la preparazione del valore di riferimento è possibile modificare il valore di riferimento nel
modo seguente:
● Inversione del valore di riferimento per cambiare il senso di rotazione del motore
(inversione).
● Blocco del senso di rotazione positivo o negativo, ad es. per nastri trasportatori, pompe o
ventilatori.
● Numero di giri minimo per evitare l'arresto a motore inserito.
● Limitazione al numero di giri massimo per la protezione di motore e meccanica.
● Generatore di rampa per l'accelerazione e la frenatura del motore con coppia ottimale.
Figura 8-18
8.4.2
Preparazione del valore di riferimento nel convertitore
Inversione del valore di riferimento
Procedura
Per invertire il valore di riferimento, procedere nel seguente modo:
Collegare il parametro p1113 con un segnale
binario, ad es. l'ingresso digitale 1.
Il valore di riferimento è stato invertito.
Convertitori con le Control Unit CU240B-2 e CU240E-2
188
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.4 Preparazione del valore di riferimento
Tabella 8- 19 Esempi per le impostazioni di inversione del valore di riferimento
8.4.3
Parametri
Nota
p1113 = 722.1
Inversione del valore di riferimento
Ingresso digitale 1 = 0: il valore di riferimento rimane invariato.
Ingresso digitale 1 = 1: il convertitore inverte il valore di riferimento.
p1113 = 2090.11
Invertire il valore di riferimento tramite la parola di comando 1, bit 11.
Blocco del senso di rotazione
Nell'impostazione di fabbrica del convertitore, la rotazione del motore è abilitata in entrambi i
sensi.
Procedura
Per bloccare in modo permanente uno dei due sensi di rotazione, procedere nel seguente
modo:
Impostare il parametro corrispondente al valore
1.
Il senso di rotazione corrispondente è stato bloccato in modo permanente.
Tabella 8- 20 Esempi per le impostazioni di blocco del senso di rotazione
8.4.4
Funzione
Parametri
Nota
p1110 = 1
Blocco direzione negativa
La direzione negativa è bloccata in modo permanente.
p1110 = 722.3
Blocco direzione negativa
Ingresso digitale 3 = 0: Senso di rotazione negativo abilitato.
Ingresso digitale 3 = 1: Senso di rotazione negativo bloccato.
Numero di giri minimo
Il convertitore impedisce un funzionamento
continuo del motore con numero di giri < al
numero di giri minimo.
I numeri di giri inferiori al numero di giri minimo
sono possibili solo in fase di accelerazione o di
frenatura.
Tabella 8- 21 Impostazione del numero di giri minimo
Parametri
Descrizione
p1080
Numero di giri minimo
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
189
Impostazione delle funzioni
8.4 Preparazione del valore di riferimento
8.4.5
Numero di giri massimo
Funzione
Il numero di giri massimo limita il
campo del valore di riferimento del
numero di giri in entrambe le direzioni.
Quando viene superato il numero di
giri massimo, il convertitore emette una
segnalazione (anomalia o avviso).
Il numero di giri massimo rappresenta inoltre un valore di riferimento per altre funzioni, come
ad es. il generatore di rampa.
Se occorre limitare il numero di giri in base al senso di rotazione, è possibile fissare dei limiti
per ogni ciascuna direzione.
Tabella 8- 22 Parametri per il numero di giri minimo e massimo
Parametri
Descrizione
p1082
Numero di giri massimo (impostazione di fabbrica: 1500 1/min)
p1083
Limite numero di giri senso di rotazione positivo (impostazione di fabbrica:
210000 1/min)
p1086
Limite numero di giri senso di rotazione negativo (impostazione di fabbrica: 210000 1/min)
Convertitori con le Control Unit CU240B-2 e CU240E-2
190
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.4 Preparazione del valore di riferimento
8.4.6
Generatore di rampa
Il generatore di rampa nel canale del valore di riferimento limita la velocità delle variazioni
del valore di riferimento del numero di giri. In questo modo, l'accelerazione e la frenatura del
motore avvengono senza strappi e riducono l'usura della meccanica della macchina
azionata.
Il generatore di rampa non è attivo se il regolatore tecnologico nel convertitore fornisce il
valore di riferimento del numero di giri.
È possibile scegliere tra due tipi di generatore di rampa:
● Generatore di rampa esteso
Il generatore di rampa esteso limita l'accelerazione e lo strappo.
● Generatore di rampa semplice
Il generatore di rampa semplice limita l'accelerazione, ma non la variazione
dell'accelerazione (strappo).
Generatore di rampa esteso
Il tempo di accelerazione e il
tempo di decelerazione del
generatore di rampa esteso
possono essere impostati
indipendentemente l'uno dall'altro.
I tempi ottimali dipendono
dall'applicazione e possono variare
da appena 100 ms (ad esempio
per gli azionamenti per nastri
trasportatori) a qualche minuto (ad
es. per le centrifughe).
L'arrotondamento iniziale e finale
consentono un'accelerazione e
una frenatura senza strappi.
I tempi di accelerazione e di
decelerazione del motore si
prolungano in base agli
arrotondamenti:
• Tempo di accelerazione
effettivo = p1120 + 0,5 ×
(p1130 + p1131).
• Tempo di decelerazione
effettivo = p1121 + 0,5 ×
(p1130 + p1131).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
191
Impostazione delle funzioni
8.4 Preparazione del valore di riferimento
Tabella 8- 23 Parametri per l'impostazione del generatore di rampa esteso
Parametri
Descrizione
p1115
Selezione del generatore di rampa (impostazione di fabbrica: 1)
Selezione del generatore di rampa:
0: Generatore di rampa semplice
1: Generatore di rampa esteso
p1120
Tempo di accelerazione del generatore di rampa (impostazione di fabbrica: 10 s)
Durata dell'accelerazione in secondi dalla velocità zero al numero di giri massimo
p1082
p1121
Tempo di decelerazione del generatore di rampa (impostazione di fabbrica: 10 s)
Durata della decelerazione in secondi dal numero di giri massimo fino al fermo
p1130
Generatore di rampa, tempo di arrotondamento iniziale(impostazione di fabbrica: 0 s)
Tempo di arrotondamento iniziale nel generatore di rampa esteso. Il valore vale per
l'accelerazione e la decelerazione.
p1131
Generatore di rampa, tempo di arrotondamento finale(impostazione di fabbrica: 0 s)
Tempo di arrotondamento finale nel generatore di rampa esteso. Il valore vale per
l'accelerazione e la decelerazione.
p1134
Selezione del tipo di arrotondamento
(impostazione di fabbrica: 0)
0: livellamento costante
1: livellamento non costante
p1135
Tempo di decelerazione OFF3 (impostazione di fabbrica: 0 s)
L'arresto rapido (OFF3) è caratterizzato da un tempo di decelerazione proprio.
p1136
Tempo di arrotondamento iniziale OFF3 (impostazione di fabbrica: 0 s)
Tempo di arrotondamento iniziale per OFF3 nel generatore di rampa esteso.
p1137
Tempo di arrotondamento finale OFF3 (impostazione di fabbrica: 0 s)
Tempo di arrotondamento finale per OFF3 nel generatore di rampa esteso.
Ulteriori informazioni sono disponibili nello schema logico 3070 e nella lista dei parametri del
Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
192
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.4 Preparazione del valore di riferimento
Impostazione del generatore di rampa esteso
Procedura
Per impostare il generatore di rampa esteso, procedere nel seguente modo:
1. Immettere il valore di riferimento del numero di giri più alto possibile.
2. Accendere il motore.
3. Valutare il comportamento dell'azionamento.
– Se il motore accelera troppo lentamente, ridurre il tempo di accelerazione.
Se il tempo di accelerazione è troppo ridotto, in fase di accelerazione il motore
raggiunge il limite di corrente e temporaneamente non può più seguire il valore di
riferimento del numero di giri. In questo caso l'azionamento supera il tempo impostato.
– Se il motore accelera troppo rapidamente, aumentare il tempo di accelerazione.
– Se l'accelerazione avviene a scatti, aumentare il tempo di arrotondamento iniziale.
– Si consiglia di impostare l'arrotondamento finale e l'arrotondamento iniziale allo stesso
valore.
4. Disinserire il motore.
5. Valutare il comportamento dell'azionamento.
– Se il motore frena troppo lentamente, ridurre il tempo di decelerazione.
Con un tempo di decelerazione troppo breve, in fase di frenatura il motore
temporaneamente non può più seguire il valore di riferimento del numero di giri. La
causa di questa condizione può essere, a seconda del Power Module utilizzato, il
raggiungimento del limite di corrente del motore o una tensione del circuito intermedio
troppo elevata pericolosa nel convertitore.
In ogni caso l'azionamento supera il tempo impostato.
– Se il motore frena troppo rapidamente, aumentare il tempo di decelerazione.
6. Ripetere i passi da 1 a 5 fino ad ottenere il comportamento ottimale dell'azionamento.
Il generatore di rampa esteso è stato impostato.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
193
Impostazione delle funzioni
8.4 Preparazione del valore di riferimento
Generatore di rampa semplice
Il generatore di rampa semplice
rende superflui i tempi di
arrotondamento contrariamente al
generatore di rampa esteso.
Tabella 8- 24 Parametri per l'impostazione del generatore di rampa semplice
Parametri
Descrizione
p1115 = 0
Selezione del generatore di rampa (impostazione di fabbrica: 1)
Selezione del generatore di rampa:
0: Generatore di rampa semplice
1: Generatore di rampa esteso
p1120
Tempo di accelerazione del generatore di rampa (impostazione di fabbrica: 10 s)
Durata dell'accelerazione in secondi dalla velocità zero al numero di giri massimo
p1082
p1121
Tempo di decelerazione del generatore di rampa (impostazione di fabbrica: 10 s)
Durata della decelerazione in secondi dal numero di giri massimo fino al fermo
p1135
Tempo di decelerazione OFF3 (impostazione di fabbrica: 0 s)
L'arresto rapido (OFF3) è caratterizzato da un tempo di decelerazione proprio.
Modifica del tempo di accelerazione e decelerazione durante il funzionamento
I tempi di accelerazione e
decelerazione del generatore di
rampa si possono variare durante il
funzionamento tramite un fattore di
scala. Vi sono vari modi per impostare
il valore di questa scalatura:
• Tramite un ingresso analogico
• Tramite un bus di campo
Convertitori con le Control Unit CU240B-2 e CU240E-2
194
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.4 Preparazione del valore di riferimento
Tabella 8- 25 Parametri di impostazione della scalatura
Parametri
Descrizione
p1138
Rampa di accelerazione scalatura (impostazione di fabbrica: 1)
Sorgente del segnale per la scalatura della rampa di accelerazione.
p1139
Rampa di decelerazione scalatura (impostazione di fabbrica: 1)
Sorgente del segnale per la scalatura della rampa di decelerazione.
Esempio
Nell'esempio seguente il controllore sovraordinato imposta tramite PROFIBUS il tempo di
accelerazione e decelerazione.
Figura 8-19
Esempio per modificare i tempi di rampa durante il funzionamento
Presupposti
● È stata resa operativa la comunicazione tra controllore e convertitore.
● Nel convertitore e nel controllore sovraordinato è impostato il telegramma libero 999.
Vedere anche la sezione: Ampliamento dei telegrammi e modifica dell'interconnessione
dei segnali (Pagina 118).
● Il controllore trasmette al convertitore nel PZD 7 il valore di scalatura.
Procedura
Proceder nel modo seguente per interconnettere nel convertitore la scalatura del tempo di
accelerazione e decelerazione con la parola di ricezione PZD 7 del bus di campo:
1. Impostare p1138 = 2050[6].
Così facendo il fattore di scala per il tempo di accelerazione viene interconnesso alla
parola di ricezione PZD 7.
2. Impostare p1139 = 2050[6].
Così facendo il fattore di scala per il tempo di decelerazione viene interconnesso alla
parola di ricezione PZD 7.
Il convertitore riceve il valore di scalatura del tempo di accelerazione e decelerazione tramite
la parola di ricezione PZD 7.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
195
Impostazione delle funzioni
8.5 Regolazione motore
8.5
Regolazione motore
I criteri di scelta per il tipo di regolazione adatto all'applicazione sono descritti nella sezione:
Controllo U/f o regolazione vettoriale (numero di giri/coppia)? (Pagina 73)
8.5.1
Controllo U/f
Il controllo U/f imposta la tensione sui morsetti del motore in funzione del valore di
riferimento del numero di giri impostato.
Il rapporto tra il valore di riferimento del numero di giri e la tensione dello statore viene
calcolato sulla base di curve caratteristiche. La frequenza di uscita richiesta si ricava dal
valore di riferimento del numero di giri e dal numero di coppie di poli del motore
(f = n * numero di coppie di poli / 60, in particolare: fmax = p1082 * numero di coppie di poli
/ 60).
Il convertitore fornisce le due curve caratteristiche più importanti (lineare e quadratica). È
anche possibile basarsi su curve caratteristiche impostabili liberamente.
Il controllo U/f non offre una regolazione esatta del numero di giri del motore. Il valore di
riferimento del numero di giri e il numero di giri impostato sull'albero motore si discostano
sempre leggermente l'uno dall'altro. L'entità dello scostamento dipende dal carico del
motore.
Se il motore collegato viene caricato con coppia nominale, in corrispondenza dello
scorrimento nominale la velocità del motore è inferiore al valore di riferimento del numero di
giri. Se il funzionamento del motore è dato dal carico, ossia se il motore funziona come
generatore, il numero di giri del motore è maggiore del valore di riferimento del numero di
giri.
Il parametro p1300 definisce la curva caratteristica.
Convertitori con le Control Unit CU240B-2 e CU240E-2
196
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.5 Regolazione motore
8.5.1.1
Caratteristiche del controllo U/f
Il convertitore dispone di varie caratteristiche U/f. In base alla curva caratteristica, con
l'aumento della frequenza il convertitore aumenta la tensione sul motore.
①
Il boost di tensione della caratteristica migliora il comportamento del motore ai bassi regimi. L'aumento di tensione è
attivo con frequenze inferiori alla frequenza nominale.
Figura 8-20
Curve U/f del convertitore
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
197
Impostazione delle funzioni
8.5 Regolazione motore
Il convertitore aumenta la tensione di uscita anche tramite il numero di giri nominale del
motore fino a raggiungere la tensione di uscita massima. Più alta è la tensione di rete,
maggiore sarà anche la tensione di uscita massima del convertitore.
Se il convertitore ha raggiunto la tensione di uscita massima, può aumentare ancora la
frequenza di uscita. Da questo punto in poi il motore funziona con deflussaggio, ossia la
coppia disponibile si riduce in modo lineare con l'aumentare dei giri.
Il valore di tensione del motore alla frequenza nominale del motore dipende anche dalle
seguenti grandezze:
● Rapporto tra dimensione del convertitore e dimensione del motore
● Tensione di rete
● Impedenza di rete
● Coppia motore attuale
La tensione del motore massima possibile in funzione della tensione di ingresso è riportata
nei dati tecnici; vedere anche la sezione Dati tecnici (Pagina 331).
8.5.1.2
Selezione della caratteristica U/f
Procedura
Per selezionare una curva caratteristica U/f, procedere nel seguente modo:
1. Selezionare il menu "PARAMS".
1. Passare online.
2. Selezionare come filtro parametri
"EXPERT".
2. Selezionare la caratteristica U/f in una delle
maschere "Regolatore numero di giri" o
"Controllo U/f".
3. Impostare p1300 al valore adeguato.
È stata selezionata una curva caratteristica U/f.
Tabella 8- 26 Curva caratteristica lineare e parabolica
Esigenza
Esempi pratici
Nota
Curva
caratteristica
Parametri
La coppia richiesta Nastro trasportatore,
dipende dal
trasportatore a rulli,
numero di giri
trasportatore a catena,
pompa a spirale
eccentrica,
compressore,
estrusore, centrifuga,
agitatore, miscelatore
-
Lineare
p1300 = 0
La coppia richiesta Pompa centrifuga,
aumenta con il
ventilatore radiale,
numero di giri
ventilatore assiale
Minori dispersioni nel motore e nel
convertitore rispetto alla curva lineare.
Il convertitore compensa le perdite di
Lineare con Flux p1300 = 1
tensione causate dalla resistenza dello
Current Control
statore. Consigliata per i motori di potenza (FCC)
inferiore a 7,5kW.
Presupposto: i dati motore sono stati
impostati ai valori indicati sulla targhetta
dei dati tecnici e dopo la messa in servizio
di base è stata eseguita l'identificazione
dei dati del motore.
Parabolica
p1300 = 2
Convertitori con le Control Unit CU240B-2 e CU240E-2
198
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.5 Regolazione motore
Tabella 8- 27 Curve caratteristiche per applicazioni speciali
Esigenza
Esempi pratici
Nota
Curva
caratteristica
Parametri
Applicazioni a
bassa dinamica e
numero di giri
costante
Pompa centrifuga,
ventilatore radiale,
ventilatore assiale
Rispetto alla curva parabolica, la modalità
ECO offre un risparmio energetico
aggiuntivo.
Modalità ECO
p1300 = 4
oppure
p1300 = 7
Se il valore di riferimento del numero di
giri viene raggiunto e rimane invariato per
5 secondi, il convertitore riduce
nuovamente la tensione di uscita.
Il convertitore
Azionamenti nel settore
deve mantenere
tessile
costante il numero
di giri del motore
in qualsiasi
circostanza.
Al raggiungimento del limite massimo di
corrente il convertitore riduce solo la
tensione dello statore, ma non il numero
di giri.
Curva
caratteristica
con frequenza
precisa
p1300 = 5
oppure
p1300 = 6
Caratteristica U/f
liberamente
impostabile
Funzionamento del
convertitore con un
motore sincrono
-
Caratteristica
impostabile
p1300 = 3
Caratteristica U/f
con valore di
riferimento della
tensione
indipendente
-
La correlazione tra frequenza e tensione
non viene calcolata nel convertitore, ma
impostata dall'utente.
Valore di
riferimento della
tensione
indipendente
p1300 = 19
Per maggiori informazioni sulle caratteristiche U/f vedere la lista dei parametri e gli schemi
logici 6300 e seguenti del Manuale delle liste.
8.5.1.3
Ottimizzazione con coppia di spunto elevata e sovraccarico breve
Impostazione dell'aumento di tensione nel controllo U/f (boost)
Il boost di tensione ha effetto su
ciascuna caratteristica U/f. La
seguente figura mostra l'aumento di
tensione sull'esempio della
caratteristica lineare.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
199
Impostazione delle funzioni
8.5 Regolazione motore
Procedura
Per impostare l'aumento di tensione, procedere nel seguente modo:
Il boost di tensione va eseguito solo per piccoli incrementi. Valori troppo elevati in p1310 ...
p1312 possono provocare il surriscaldamento del motore e la disinserzione per
sovracorrente del convertitore.
1. Accendere il motore con numero di giri medio
2. Ridurre la velocità fino a pochi giri al minuto.
3. Controllare se il motore gira.
4. Se il motore non gira o è fermo, aumentare la tensione p1310 finché non si è soddisfatti
del comportamento.
5. Accelerare il motore con il carico più elevato fino al numero di giri massimo e verificare se
segue il valore di riferimento.
6. Se durante l'accelerazione il motore si inclina, aumentare il boost di tensione p1311
finché l'accelerazione al numero di giri massimo non presenta problemi.
Solo in applicazioni con una coppia di spunto degna di nota è necessario aumentare il
parametro p1312 per ottenere un comportamento del motore soddisfacente.
Per ulteriori informazioni su questa funzione consultare la lista dei parametri e lo schema
logico 6300 del Manuale delle liste.
L'aumento di tensione è stato impostato.
Parametri
Descrizione
p1310
Boost di tensione permanente (impostazione di fabbrica 50 %)
Compensa le perdite di tensione dovute a cavi motore lunghi e le perdite ohmiche nel
motore.
p1311
Boost di tensione all'accelerazione (impostazione di fabbrica 0%)
Mette a disposizione una coppia aggiuntiva in fase di accelerazione del motore.
p1312
Boost di tensione all'avviamento (impostazione di fabbrica 0%)
Mette a disposizione una coppia aggiuntiva, ma solo per il primo processo di
accelerazione dopo l'inserzione del motore ("coppia di spunto").
Convertitori con le Control Unit CU240B-2 e CU240E-2
200
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.5 Regolazione motore
8.5.2
Regolazione di velocità
8.5.2.1
Caratteristiche della regolazione vettoriale senza encoder
Regolazione vettoriale senza encoder
La regolazione di velocità calcola il carico e lo scorrimento del motore in base a un modello
di motore. Basandosi su questo calcolo, il convertitore imposta la tensione di uscita e la
frequenza di uscita in modo tale che il numero di giri del motore segua il valore di riferimento
indipendentemente dal carico del motore.
La regolazione di velocità funziona senza misura diretta del numero di giri del motore e viene
pertanto denominata anche "Regolazione vettoriale senza encoder".
Figura 8-21
Schema logico semplificato della regolazione vettoriale senza encoder
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
201
Impostazione delle funzioni
8.5 Regolazione motore
8.5.2.2
Selezione della regolazione del motore
La regolazione di velocità è già preimpostata
Per un buon comportamento del regolatore è necessario adattare gli elementi evidenziati in
grigio nella vista d'insieme raffigurata in precedenza. Se nella messa in servizio è stata
selezionata come tipo di regolazione la regolazione di velocità, quanto segue è già
impostato:
● Il numero di giri massimo per l'applicazione utilizzata.
● Il modello di motore e corrente: se i dati motore nel convertitore coincidono con quelli
riportati nella targhetta dei dati tecnici, il modello del motore e del convertitore
corrispondono e la regolazione vettoriale può funzionare in modo soddisfacente.
● Il convertitore calcola i limiti di coppia in funzione del limite di corrente impostato nella
messa in servizio di base.
Indipendentemente da questo, è possibile impostare anche limiti di coppia positivi e
negativi o limitare la potenza del motore.
● Il convertitore ha preimpostato il regolatore del numero di giri con l'auto-ottimizzazione
(misura in rotazione).
Se si desidera ottimizzare ulteriormente questa impostazione, seguire le istruzioni
riportate più avanti in questo capitolo.
Selezione della regolazione vettoriale senza encoder
Procedura
Per attivare la regolazione vettoriale senza encoder, procedere nel seguente modo:
1. Nel menu "Parametri" selezionare il
parametro p1300.
2. Impostare p1300 = 20.
1. Passare online.
2. Selezionare la regolazione di velocità senza
encoder nella maschera "Regolatore numero
di giri" o "Controllo U/f".
È stata attivata la regolazione vettoriale senza encoder.
Convertitori con le Control Unit CU240B-2 e CU240E-2
202
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.5 Regolazione motore
8.5.2.3
Ottimizzazione del regolatore del numero di giri in un secondo momento
Nei casi seguenti è necessario ottimizzare manualmente il regolatore del numero di giri:
● Se l'applicazione utilizzata non ha consentito l'auto-ottimizzazione in quanto il motore non
ha potuto girare liberamente.
● Se si è insoddisfatti del risultato dell'auto-ottimizzazione del convertitore.
● Se il convertitore ha interrotto l'auto-ottimizzazione con un'anomalia.
Procedura
Per ottimizzare il regolatore del numero di giri manualmente, procedere come segue:
1. Impostare il tempo di accelerazione e il tempo di
decelerazione del generatore di rampa, p1120 = 0 e
p1121 = 0.
2. Impostare il precomando del regolatore del numero di
giri p1496 = 0.
1. Passare online e impostare nella maschera "Generatore
di rampa" il valore 0 per i tempi.
2. Passare online e impostare il valore 0 nella maschera
"Regolatore numero di giri".
3. Preimpostare un gradino di setpoint e osservare il
relativo valore attuale.
3. Preimpostare un gradino di setpoint e osservare il valore
attuale corrispondente, ad es. con la funzione Trace in
STARTER.
4. Ottimizzare il regolatore del numero di giri modificando i
parametri del regolatore KP e TN finché l'azionamento
non funziona in modo ottimale (vedere le figure riportate
sotto).
4. Passare online e ottimizzare il regolatore nella maschera
"Regolatore numero di giri" modificando i parametri del
regolatore KP e TN finché l'azionamento non funziona in
modo ottimale (vedere le figure riportate sotto).
–
KP = p1470
–
TN = p1472
5. Reimpostare il tempo di accelerazione e decelerazione
del generatore di rampa sul valore originario.
6. Reimpostare al 100% il precomando del regolatore del
5. Reimpostare il tempo di accelerazione e il tempo di
numero di giri.
decelerazione del generatore di rampa p1120 e p1121 al
valore originario.
6. Impostare il precomando del regolatore del numero di
giri p1496 = 100 %.
Il regolatore del numero di giri è stato ottimizzato.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
203
Impostazione delle funzioni
8.5 Regolazione motore
Comportamento di regolazione ottimale
per applicazioni che non ammettono
sovraoscillazioni.
Il valore attuale si avvicina al valore di
riferimento senza sovraoscillazioni
significative.
Comportamento di regolazione ottimale
per una rapida regolazione in salita e in
discesa dei componenti che generano
disturbi.
Il valore attuale si avvicina al valore di
riferimento con una leggera
sovraoscillazione (massimo il 10% del
gradino di setpoint).
Il valore attuale si avvicina al valore di
riferimento solo lentamente.
• Aumentare la quota proporzionale KP
e ridurre il tempo di integrazione TN.
Il valore attuale si avvicina rapidamente
al valore di riferimento, ma la
sovraoscillazione è consistente.
• Ridurre la quota proporzionale KP e
aumentare il tempo di integrazione
TN.
Convertitori con le Control Unit CU240B-2 e CU240E-2
204
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.5 Regolazione motore
8.5.2.4
Regolazione della coppia
La regolazione della coppia è una parte della regolazione vettoriale e riceve normalmente il
valore di riferimento dall'uscita del regolatore di velocità. Disattivando il regolatore del
numero di giri e impostando direttamente il valore di riferimento della coppia, la regolazione
del numero di giri diventa una regolazione della coppia. Il convertitore non regola quindi più il
numero di giri del motore, bensì la coppia generata dal motore.
Applicazioni tipiche per la regolazione della coppia
La regolazione della coppia viene utilizzata in applicazioni nelle quali il numero di giri del
motore viene impostato dalla macchina operatrice collegata. Esempi tipici sono:
● Suddivisione del carico tra azionamenti master e slave:
l'azionamento master funziona con regolazione di velocità, l'azionamento slave con
regolazione della coppia.
● Bobinatrici
Messa in servizio della regolazione della coppia
La regolazione della coppia funziona senza errori solo se durante la messa in servizio di
base i dati del motore sono stati parametrizzati correttamente e se è stata eseguita
un'identificazione dei dati del motore sul motore freddo.
Per maggiori informazioni sulla messa in servizio di base vedere le seguenti sezioni:
● Messa in servizio di base con l'Operator Panel BOP-2 (Pagina 76)
● Messa in servizio di base con STARTER (Pagina 81)
Tabella 8- 28 I parametri principali della regolazione della coppia
Parametri
Descrizione
p1300 = …
Tipo di regolazione:
20: Regolazione vettoriale senza encoder di velocità
22: Regolazione di coppia senza encoder di velocità
p0300 …
p0360
I dati del motore vengono trasmessi nella messa in servizio di base conformemente
alle indicazioni della targhetta dei dati tecnici e calcolati con l'identificazione dei dati
motore
p1511 = …
Coppia aggiuntiva
p1520 = …
Limite superiore di coppia
p1521 = …
Limite inferiore di coppia
p1530 = …
Valore limite per potenza motoria
p1531 = …
Valore limite per potenza generatoria
Per ulteriori informazioni su questa funzione consultare la lista dei parametri e gli schemi
logici 6030 e segg. del Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
205
Impostazione delle funzioni
8.6 Funzioni di protezione
8.6
Funzioni di protezione
Il convertitore propone funzioni di protezione contro la sovratemperatura e la sovracorrente
del convertitore e del motore. Inoltre il convertitore di protegge da un'eccessiva tensione del
circuito intermedio in caso di funzionamento generatorio del motore.
8.6.1
Sorveglianza della temperatura del convertitore
Il convertitore utilizza diverse sorveglianze per proteggersi dalla sovratemperatura:
● la sorveglianza I2t (avviso A07805, anomalia F30005)
La sorveglianza I2t misura il sovraccarico attuale in base a un valore di riferimento della
corrente. Il parametro r0036 [%] mostra il sovraccarico attuale in %. Finché la corrente
attuale non supera il valore di riferimento, il sovraccarico è r0036 = 0.
● Sorveglianza della temperatura del chip della parte di potenza (avviso A05006 - anomalia
F30024)
Il convertitore controlla la differenza di temperatura tra chip di potenza (IGBT) e radiatore.
I valori di misura sono in r0037[1] [°C].
● Sorveglianza del radiatore (avviso A05000, anomalia F30004)
Il convertitore sorveglia la temperatura del radiatore del Power Module. I valori sono in
r0037[0] [°C].
Reazione del convertitore
La temperatura del convertitore è determinata essenzialmente dai seguenti fattori:
● le perdite ohmiche della corrente di uscita
● le perdite di commutazione che si creano con l'invio degli impulsi del motore.
Il parametro p0290 determina la reazione del convertitore a una temperatura troppo elevata.
Parametri
Descrizione
p0290
Reazione al sovraccarico della parte di potenza
(impostazione di fabbrica per i convertitori SINAMICS G120 con Power Module
PM260: 0;
impostazione di fabbrica per tutti gli altri convertitori: 2)
Impostazione della reazione a un sovraccarico termico della parte di potenza:
0: Riduzione della corrente di uscita (nella regolazione vettoriale) o del numero di giri
(nel controllo U/f)
1: Nessuna riduzione, disinserzione al raggiungimento della soglia di sovraccarico
(F30024)
2: Riduzione della frequenza degli impulsi e della corrente di uscita (nella regolazione
vettoriale) o della frequenza degli impulsi e del numero di giri (nel controllo U/f)
3: Riduzione della frequenza degli impulsi
p0292
Parte di potenza, soglia di avviso per temperatura(impostazione di fabbrica: radiatore [0]
5°C, semiconduttore [1] 15°C)
Il valore viene impostato come differenza rispetto alla temperatura di disinserzione.
Convertitori con le Control Unit CU240B-2 e CU240E-2
206
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.6 Funzioni di protezione
8.6.2
Sorveglianza della temperatura del motore tramite sensore di temperatura
Collegamento di un sensore di temperatura
Per garantire la protezione del motore contro la sovratemperatura, è possibile impiegare uno
dei seguenti sensori:
● Interruttore termostatico (ad es. interruttore bimetallico)
● Sensore PTC
● Sensore KTY84
Collegare il sensore di temperatura del motore ai morsetti 14 e 15 del convertitore.
Figura 8-22
Collegamento del sensore di temperatura del motore al convertitore
Impostazione della reazione alla sovratemperatura del motore
Se si utilizza un interruttore termostatico o un sensore PTC, impostare la reazione alla
sovratemperatura del motore tramite p0610 nel seguente modo:
● p0610 = 0
– Avviso A07910,
– Nessuna disinserzione
● p0610 = 1, p0610 = 2, p0610 = 12
– Avviso A07910
– Disinserzione con anomalia F07011
Se si utilizza un sensore KTY84, impostare la temperatura per la soglia di avviso o di
anomalia tramite p0604 o p0605.
● Sorveglianza tramite p0604: Reazione conforme all'impostazione in p0610
● Sorveglianza tramite p0605: Disinserzione con anomalia non appena viene superata la
soglia impostata.
Maggiori dettagli sono disponibili nel Manuale delle liste.
Interruttore termostatico
Il convertitore interpreta una resistenza ≥ 100 Ω come interruttore termostatico aperto e
reagisce secondo l'impostazione effettuata in p0610.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
207
Impostazione delle funzioni
8.6 Funzioni di protezione
Sensore PTC
Il convertitore interpreta una resistenza > 1650 Ω come sovratemperatura e reagisce
secondo l'impostazione effettuata in p0610.
Il convertitore interpreta una resistenza < 20 Ω come cortocircuito e reagisce con il
messaggio di avviso A07015. Se l'avviso resta attivo per più di 100 millisecondi, il
convertitore si disinserisce con l'anomalia F07016.
Sensore KTY84
Un sensore KTY consente di sorvegliare la temperatura del motore e un'eventuale rottura
conduttore o un cortocircuito del sensore stesso.
ATTENZIONE
Danni al motore dovuti a surriscaldamento
Un sensore KTY collegato con polarità non corretta può causare danni al motore per
surriscaldamento, dovuti al mancato riconoscimento di una condizione di sovratemperatura
del motore da parte del convertitore.
Collegare il sensore KTY con la polarità corretta.
● Sorveglianza della temperatura:
con un sensore KTY il convertitore analizza la temperatura del motore nel campo -48 °C
... +248 °C.
Con i parametri p0604 e p0605 si imposta la temperatura per le soglie di avviso e di
anomalia.
– Avviso sovratemperatura (A07910):
- Temperatura motore > p0604 e p0610 = 0
– Anomalia sovratemperatura (F07011):
il convertitore si disinserisce con un'anomalia nei seguenti casi:
- Temperatura motore > p0605
- Temperatura motore > p0604 e p0610 ≠ 0
● Sorveglianza sensore (A07015 o F07016):
– Rottura conduttore:
Il convertitore interpreta una resistenza > 2120 Ω come rottura conduttore ed emette
l'avviso A07015. Dopo 100 millisecondi il convertitore passa in anomalia con F07016.
– Cortocircuito:
Il convertitore interpreta una resistenza < 50 Ω come cortocircuito ed emette l'avviso
A07015. Dopo 100 millisecondi il convertitore passa in anomalia con F07016.
Convertitori con le Control Unit CU240B-2 e CU240E-2
208
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.6 Funzioni di protezione
Impostazione dei parametri per la sorveglianza della temperatura
Parametri
Descrizione
p0335
Indicazione raffreddamento del motore
0: raffreddamento naturale - con ventola sull'albero motore (impostazione di fabbrica)
1: raffreddamento esterno - con ventola azionata indipendentemente dal motore
2: Raffreddamento a liquido
128: Nessun ventilatore
p0601
Tipo di sensore temperatura motore
0: Nessun sensore (impostazione di fabbrica)
1: PTC (→ p0604)
2: KTY84 (→ p0604, p0605)
4: Interruttore termostatico
p0604
Soglia di avviso temperatura motore (impostazione di fabbrica 130 °C)
p0605
Soglia di anomalia temperatura motore (impostazione di fabbrica: 145 °C)
Impostazione per il sensore KTY84. Questo parametro non è significativo per un
sensore PTC.
p0610
Reazione sovratemperatura motore
Determina il comportamento non appena la temperatura del motore raggiunge la
soglia di avviso p0604.
0: avviso (A07910), nessuna anomalia.
1: avviso (A07910); il limite di corrente viene ridotto e viene avviato il
temporizzatore. Disinserzione con anomalia (F07011).
2: avviso (A07910); viene avviato il temporizzatore. Disinserzione con anomalia
(F07011).
12: Come al punto 2, tuttavia nel calcolo della temperatura del motore viene presa in
considerazione l'ultima temperatura di disinserzione (impostazione di fabbrica).
p0640
Limite di corrente (immissione in A)
Per ulteriori informazioni sulla sorveglianza della temperatura del motore, vedere lo schema
logico 8016 del Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
209
Impostazione delle funzioni
8.6 Funzioni di protezione
8.6.3
Protezione del motore mediante calcolo della temperatura del motore
Il calcolo della temperatura è possibile solo nella modalità regolazione vettoriale (p1300 ≥
20) e funziona mediante il calcolo in base a un modello termico di motore.
Tabella 8- 29 Parametri per il rilevamento della temperatura senza sensore di temperatura
Parametri
p0621= 1
Descrizione
Rilevamento della temperatura del motore dopo il riavvio
0: nessuna identificazione della temperatura (impostazione di fabbrica)
1: identificazione della temperatura al primo avviamento del motore
2: identificazione della temperatura a ogni inserzione del motore
p0622
Tempo di magnetizzazione del motore per il rilevamento della temperatura dopo
l'avviamento (viene impostato automaticamente come risultato dell'identificazione dati
del motore)
p0625 = 20
Temperatura ambiente del motore
Indicazione della temperatura ambiente del motore in°C al momento del rilevamento
dei dati motore (impostazione di fabbrica: 20 °C).
La differenza tra la temperatura del motore e la temperatura ambiente del motore
p0625 deve trovarsi nel campo di tolleranza di circa ± 5 °C.
8.6.4
Protezione da sovracorrente
Con la regolazione vettoriale la corrente del motore rimane nell'ambito dei limiti di coppia
impostati.
Con il controllo U/f il regolatore di corrente max. (regolatore I-max) impedisce i sovraccarichi
del motore e del convertitore limitando la corrente di uscita.
Funzionamento del regolatore I-max
In caso di sovraccarico, sia il numero di giri sia la tensione dello statore vengono ridotti fino a
quando la corrente non si trova nuovamente nel campo di valori consentito. Se il motore
funziona in modalità generatoria, ovvero se viene azionato dalla macchina collegata, il
regolatore I-max aumenta il numero di giri e la tensione dello statore per ridurre la corrente.
Nota
Il carico del convertitore viene ridotto solo quando la coppia del motore diminuisce per via di
un basso numero di giri (ad es. nelle ventole).
Nella modalità generatoria la corrente diminuisce solo quando la coppia decresce
all'aumento del numero di giri.
Convertitori con le Control Unit CU240B-2 e CU240E-2
210
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.6 Funzioni di protezione
Impostazioni
L'impostazione di fabbrica del regolatore I-max deve essere modificata solo se
sull'azionamento dovessero verificarsi oscillazioni al raggiungimento del limite di corrente o
in caso di disinserzione per sovracorrente.
Tabella 8- 30 Parametri del regolatore I-max
Parametri
Descrizione
p0305
Corrente nominale del motore
p0640
Limite di corrente del motore
p1340
Guadagno proporzionale del regolatore I-max per la riduzione del numero di giri
p1341
Tempo dell'azione integratrice del regolatore I-max per la riduzione del numero di giri
r0056.13
Stato: Regolatore I-max attivo
r1343
Uscita del numero di giri del-regolatore I-max.
Visualizza il valore a cui il regolatore I-max riduce il numero di giri.
Per ulteriori informazioni su questa funzione vedere lo schema logico 1690 del Manuale
delle liste.
8.6.5
Limitazione della tensione max. del circuito intermedio
Come può il motore provocare delle sovratensioni?
Un motore asincrono funziona da generatore quando viene azionato dal carico collegato. Un
generatore converte la potenza meccanica in potenza elettrica. La potenza elettrica viene
recuperata nel convertitore e provoca l'aumento della tensione del circuito intermedio Vdc
nel convertitore.
A partire da una tensione del circuito intermedio critica, sia il convertitore che il motore
vengono danneggiati. Prima che si verifichino tensioni pericolose, il convertitore disinserisce
il motore collegato con l'anomalia
"Sovratensione del circuito intermedio".
Protezione del motore e del convertitore contro la sovratensione
Il regolatore Vdc_max evita, entro i limiti consentiti dall'applicazione, un aumento critico della
tensione del circuito intermedio. Il regolatore Vdc_max prolunga il tempo di decelerazione
del motore durante la frenatura, affinché il motore restituisca al convertitore la potenza
strettamente necessaria a coprire le perdite che si verificano al suo interno.
La regolazione Vdc_max non è adatta per le applicazioni con funzionamento generatorio
continuo. Applicazioni di questo tipo sono i dispositivi di sollevamento o la frenatura di
masse centrifughe di grandi dimensioni. Per maggiori informazioni sui metodi di frenatura,
vedere la sezione Funzioni di frenatura del convertitore (Pagina 220).
A seconda che il motore funzioni con controllo U/f o con regolazione vettoriale, esistono due
diversi gruppi di parametri per il regolatore Vdc_max.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
211
Impostazione delle funzioni
8.6 Funzioni di protezione
Tabella 8- 31 Parametri della regolazione Vdc_max
Parametri per il
controllo U/f
Parametri per la Descrizione
regolazione
vettoriale
p1280 = 1
p1240 = 1
Configurazione della regolazione Vdc_max o della sorveglianza
Vdc(impostazione di fabbrica: 1)1: abilitazione della regolazione
Vdc_max
r1282
r1242
Livello d'inserzione della regolazione Vdc_max
Indica il valore della tensione del circuito intermedio a partire dal
quale la regolazione Vdc_max diventa attiva
p1283
p1243
Fattore di dinamica della regolazione Vdc_max (impostazione di
fabbrica: 100 %) Scalatura dei parametri di regolazione p1290,
p1291 e p1292
p1290
p1250
Guadagno proporzionale della regolazione Vdc_max
(impostazione di fabbrica: 1)
p1291
p1251
Tempo dell'azione integratrice della regolazione Vdc_max
(impostazione di fabbrica p1291: 40 ms, impostazione di
fabbrica p1251: 0 ms)
p1292
p1252
Tempo di anticipo della regolazione Vdc_max (impostazione di
fabbrica p1292: 10 ms, impostazione di fabbrica p1252: 0 ms)
p1294
p1254
Rilevamento automatico livello ON della regolazione Vdc_max
(impostazione di fabbrica p1294: 0, impostazione di fabbrica
p1254: 1) Attiva o disattiva il rilevamento automatico dei livelli di
inserzione del regolatore Vdc_max.
0: Rilevamento automatico bloccato
1: Rilevamento automatico attivato
p0210
p0210
Tensione di collegamento apparecchi
Se p1254 oppure p1294 = 0, il convertitore calcola le soglie di
intervento della regolazione Vdc_max a partire da questo
parametro.
Impostare questo parametro al valore effettivo della tensione di
ingresso.
Per ulteriori informazioni su questa funzione consultare lo schema logico 6320 e lo schema
logico 6220 nel Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
212
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7
Funzioni specifiche dell'applicazione
Il convertitore offre una serie di funzioni che possono essere utilizzate indipendentemente
dall'applicazione, ad esempio:
● Commutazione unità
● Funzioni di frenatura
● Reinserzione e riavviamento al volo
● Funzioni semplici di regolazione del processo
● Funzioni logiche e aritmetiche mediante blocchi funzionali liberi
● Visualizzazione del risparmio energetico per pompe e ventilatori
Per le descrizioni dettagliate vedere le sezioni seguenti.
8.7.1
Commutazione unità
Descrizione
La commutazione delle unità permette di adeguare il convertitore alla rete di alimentazione
(50/60 Hz) e di selezionare come unità di base le unità di misura statunitensi o le unità di
misura SI.
Indipendentemente da queste impostazioni è possibile definire le unità per le grandezze di
processo o eseguire la commutazione ai valori percentuali.
Esistono le seguenti possibilità:
● Commutazione della norma motori (Pagina 215) IEC/NEMA (adeguamento alla rete di
alimentazione)
● Commutazione del sistema di unità (Pagina 216)
● Commutazione delle grandezze di processo per il regolatore PID (Pagina 216)
Nota
La norma motori, il sistema di unità e le grandezze di processo possono essere
modificate soltanto offline.
La procedura è descritta nella sezione Commutazione delle unità con STARTER
(Pagina 217).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
213
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Nota
Limitazioni per la commutazione delle unità
• I valori indicati sulla targhetta dei dati tecnici del convertitore o del motore non
possono essere rappresentati come valori percentuali.
• La commutazione ripetuta dell'unità (ad es.: percentuale → unità fisica 1 → unità fisica
2 → percentuale) può causare la modifica del valore originale di un punto decimale a
causa di un errore di arrotondamento.
• Se si commuta l'unità al valore percentuale e quindi si modifica il valore di riferimento,
i valori percentuali si riferiscono al nuovo valore di riferimento.
Esempio:
– un numero di giri fisso dell'80 % corrisponde, ad un numero di giri di riferimento di
1500 1/min, ad un numero di giri di riferimento pari a 1200 1/min.
– Se il numero di giri di riferimento viene modificato a 3000 1/min, il valore 80 %
rimane invariato ed è pari a 2400 1/min.
Grandezze di riferimento per la commutazione delle unità
p2000 Frequenza/numero di giri di riferimento
p2001 Tensione di riferimento
p2002 Corrente di riferimento
p2003 Coppia di riferimento
r2004 Potenza di riferimento
p2005 Angolo di riferimento
p2007 Accelerazione di riferimento
Convertitori con le Control Unit CU240B-2 e CU240E-2
214
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.1.1
Commutazione della norma motori
La norma motori si imposta con p0100; vale quanto segue:
● Motore p0100 = 0: IEC (50 Hz, unità SI)
● Motore p0100 = 1: NEMA (60 Hz, unità US)
● Motore p0100 = 2: NEMA (60 Hz, unità SI)
Nella commutazione sono coinvolti i seguenti parametri.
Tabella 8- 32 Grandezze coinvolte nella commutazione della norma motori
N. P
Designazione
Unità di misura in p0100 =
0*)
1
2
kW
HP
kW
r0206
Potenza nominale del Power Module
p0307
Potenza nominale del motore
kW
HP
kW
p0316
Costante di coppia del motore
Nm/A
lbf ft/A
Nm/A
r0333
Coppia nominale del motore
Nm
lbf ft
Nm
r0334
Costante di coppia del motore attuale
Nm/A
lbf ft/A
Nm/A
p0341
Momento di inerzia del motore
kgm2
lb ft2
kgm2
p0344
Massa motore (per il modello termico di
motore)
kg
Lb
kg
r1969
Momento d'inerzia regolat. ott. vel. calcolato
kgm2
lb ft2
kgm2
*) Impostazione di fabbrica
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
215
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.1.2
Commutazione del sistema di unità
Il sistema di unità può essere commutato tramite p0505. Sono disponibili le seguenti opzioni:
● p0505 = 1: unità SI (impostazione di fabbrica)
● p0505 = 2: unità SI o valore %, riferito alle unità SI
● p0505 = 3: unità US
● p0505 = 4: unità US o valore %, riferito alle unità US
Nota
Particolarità
I valori percentuali per p0505 = 2 e p0505 = 4 sono identici. Per il calcolo interno e per
l'emissione di grandezze fisiche è tuttavia importante sapere se la conversione si riferisce
alle unità SI o US.
Per le grandezze che non possono essere commutate al valore %, vale:
p0505 = 1 ≙ p0505 = 2 e p0505 = 3 ≙ p0505 = 4.
Per le grandezze che sono uguali nel sistema SI e nel sistema US, ma che possono
tuttavia essere rappresentate come valore percentuale, vale:
p0505 = 1 ≙ p0505 = 3 e p0505 = 2 ≙ p0505 = 4.
Parametri coinvolti nella commutazione
I parametri coinvolti nella commutazione del sistema di unità sono ordinati per gruppi di
unità. Una panoramica dei gruppi di unità e delle unità possibili è disponibile nel Manuale
delle liste, sezione "Gruppo di unità e selezione unità".
8.7.1.3
Commutazione delle grandezze di processo per il regolatore PID
Nota
Si raccomanda di accordare le unità e i valori di riferimento del regolatore PID durante la
messa in servizio.
Una modifica successiva della grandezza di riferimento o dell'unità può causare errori di
calcolo o di visualizzazione.
Commutazione delle grandezze di processo del regolatore PID
È possibile commutare le grandezze di processo del regolatore PID tramite p0595. La
grandezza di riferimento per valori fisici si imposta in p0596.
I parametri interessati dalla commutazione delle unità del regolatore PID fanno parte del
gruppo di unità 9_1. Per informazioni dettagliate, vedere la sezione "Gruppo di unità e
selezione unità" nel Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
216
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.1.4
Commutazione delle unità con STARTER
Presupposto
Per poter effettuare la commutazione delle unità è necessario che il convertitore si trovi in
modalità offline.
STARTER segnala se le impostazioni devono essere modificate online nel convertitore o
offline nel PC (
/
).
La modalità può essere modificata
selezionando i pulsanti della barra dei menu
qui illustrati.
Procedura
1. Selezionare la configurazione
2. Per eseguire la commutazione delle unità accedere alla scheda "Unità" nella maschera di
configurazione.
3. Commutazione del sistema di unità
4. Selezione delle grandezze di processo del regolatore PID
5. Adattamento alla rete di alimentazione
È stata eseguita la commutazione delle unità.
• Salvare le impostazioni e andare online.
In questo modo il convertitore riconosce che
offline sono impostate unità e grandezze di
processo diverse rispetto al convertitore e lo
segnala nella seguente maschera:
• Applicare le impostazioni nel convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
217
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.2
Visualizzazione del risparmio energetico
Contesto
Nelle macchine fluidodinamiche tradizionali la portata è controllata da valvole a saracinesca
o valvole a farfalla. L'azionamento funziona costantemente al numero di giri nominale. Se la
portata viene ridotta da valvole a saracinesca o valvole a farfalla, il rendimento dell'impianto
si riduce. Se le valvole a saracinesca o le valvole a farfalla sono completamente chiuse, il
rendimento è minimo. Inoltre possono determinarsi effetti indesiderati, ad es. la formazione
di bolle di vapore nei liquidi (cavitazione) o il riscaldamento del fluido.
Il convertitore regola la portata o la pressione tramite il numero di giri della macchina
fluidodinamica. Il questo modo la macchina fluidodinamica funziona nell'intera area di lavoro
con un rendimento prossimo a quello ottimale e utilizza, in particolare nel funzionamento con
carico parziale, meno energia rispetto alla regolazione tramite valvole a saracinesca o a
farfalla.
Funzione
La visualizzazione del risparmio energetico calcola l'energia risparmiata durante il
funzionamento di macchine fluidodinamiche, ad es. pompe centrifughe, ventilatori,
compressori radiali o assiali. La visualizzazione del risparmio energetico confronta il
funzionamento con convertitore con il funzionamento in rete e un controllo tramite valvole a
farfalla.
Il convertitore indica l'energia risparmiata in kWh nel parametro r0041, con riferimento alle
ultime 100 ore di funzionamento.
Per un numero di ore di funzionamento inferiore a 100, il convertitore calcola il risparmio
energetico per 100 ore di funzionamento.
Il convertitore calcola il risparmio in base alla curva caratteristica di esercizio impostata.
Tabella 8- 33 Curva caratteristica di esercizio impostata
Punto 1
Punto 2
Punto 3
Punto 4
Punto 5
Potenza
p3320 = 25 %
p3322 = 50 %
p3324 = 77 %
p3326 = 92 %
p3328 = 100 %
Numero di giri
p3321 = 0 %
p3323 = 25 %
p3325 = 50 %
p3327 = 75 %
p3329 = 100 %
Se occorre un valore preciso per il risparmio energetico, è necessario adattare la curva
caratteristica di esercizio impostata in fabbrica.
Altri parametri per la visualizzazione del consumo di energia:
r0039.0: consumo di energia dall'ultimo ripristino
r0039.1: energia assorbita dall'ultimo ripristino
r0039.2: energia recuperata dall'ultimo ripristino
p0040: parametro per il ripristino dei parametri r0039 e r0041.
r0041: visualizzazione dell'energia risparmiata dall'ultimo ripristino, riferita alla curva
caratteristica di esercizio definita dai parametri p3320 …p3329.
Convertitori con le Control Unit CU240B-2 e CU240E-2
218
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Adattamento della curva caratteristica di esercizio
Presupposto
Per il calcolo della curva caratteristica di esercizio sono necessari i seguenti dati:
● Curve caratteristiche di esercizio del costruttore
– Per le pompe: prevalenza e potenza in relazione alla mandata
– Per i ventilatori: Aumento della pressione totale e requisiti di potenza in relazione al
flusso volumetrico
● Curve caratteristiche dell'impianto per 5 portate diverse.
Procedura
Per adattare la curva caratteristica di esercizio, procedere nel seguente modo:
1. Calcolare la prevalenza richiesta per le 5 diverse portate, riferita a una pompa collegata
direttamente alla rete (n = 100 %).
A questo scopo impostare la formula della curva caratteristica dell'impianto e la formula
della curva caratteristica di esercizio della prevalenza allo stesso valore.
Se la prevalenza è più bassa anche il numero di giri deve essere più basso.
2. Immettere i numeri di giri nei parametri p3321, p3323, p3325, p3327 e p3329.
3. Calcolare, in base alle portate e alle rispettive curve caratteristiche di esercizio del
costruttore, la potenza richiesta dalla pompa direttamente sulla rete per le diverse
portate.
4. Immettere i numeri di giri nei parametri p3320, p3322, p3324, p3326 e p3328.
La curva caratteristica di esercizio è stata adattata e si ottiene un risultato preciso per il
risparmio energetico.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
219
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.3
Funzioni di frenatura del convertitore
Si distingue tra frenatura meccanica e frenatura elettrica di un motore:
● I freni meccanici sono generalmente freni di stazionamento motore che vengono chiusi a
motore fermo. I freni di esercizio meccanici che vengono chiusi a motore funzionante
presentano un'usura elevata e vengono quindi utilizzati spesso solo come freni di
emergenza.
Se il motore è dotato di freno di stazionamento motore, utilizzare la funzione del
convertitore per il comando del freno di stazionamento motore, vedere la sezione Freno
di stazionamento motore (Pagina 230).
● La frenatura elettrica del motore avviene attraverso il convertitore. La frenatura elettrica è
completamente esente da usura. Nello stato di fermo il motore viene normalmente
disinserito per risparmiare energia e non generare calore superfluo.
8.7.3.1
Metodi di frenatura elettrici
Potenza generatoria
Quando un motore asincrono frena elettricamente il carico collegato e la potenza meccanica
supera le perdite meccaniche ed elettriche, il motore funziona come generatore. Il motore
converte la potenza meccanica in potenza elettrica. Esempi di applicazioni nelle quali può
comparire brevemente il funzionamento generatorio:
● Azionamenti di mole
● Ventilatori
In alcune applicazioni il funzionamento generatorio del motore può perdurare per un tempo
più prolungato, ad es.:
● Centrifughe
● Dispositivi di sollevamento e gru
● Nastri trasportatori durante la discesa del carico (trasportatori verticali o obliqui)
Il convertitore offre, indipendentemente dal Power Module impiegato, le seguenti possibilità
di trasformazione della potenza generatoria del motore in calore o di recupero dell'energia in
rete:
● Frenatura in corrente continua (Pagina 222)
per i Power Module PM230, PM240, PM340, PM250 e PM260
● Frenatura Compound (Pagina 225)
per i Power Module PM240 e PM340
● Frenatura dinamica (Pagina 226)
per i Power Module PM240 e PM340
● Frenatura con recupero in rete (Pagina 230)
per i Power Module PM250 e PM260
Convertitori con le Control Unit CU240B-2 e CU240E-2
220
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Caratteristiche principali delle funzioni di frenatura
Frenatura in corrente continua
Il motore trasforma la potenza generatoria in calore.
• Vantaggio: il motore frena senza che il
convertitore debba gestire la potenza generatoria
• Svantaggi: elevato riscaldamento del motore;
nessun comportamento di frenatura definito;
nessuna coppia di frenatura costante; nessuna
coppia di frenatura da fermo; la potenza
generatoria viene dissipata sotto forma di calore;
non funziona in caso di mancanza di rete
Frenatura Compound
Una variante della frenatura in corrente continua,
con la quale il motore viene frenato in modo definito.
Tutte le altre caratteristiche sono uguali a quelle
della frenatura in corrente continua.
Frenatura dinamica
Il convertitore converte la potenza generatoria in
calore con l'ausilio di una resistenza di frenatura.
• Vantaggi: comportamento di frenatura definito;
nessun riscaldamento aggiuntivo del motore;
coppia di frenatura costante; funziona in linea di
massima anche in caso di mancanza di rete
• Svantaggi: resistenza di frenatura necessaria; la
potenza generatoria viene dissipata sotto forma
di calore
Frenatura con recupero in rete
Il convertitore recupera la potenza generatoria in
rete.
• Vantaggi: coppia di frenatura costante; la
potenza generatoria non viene convertita in
calore, bensì recuperata in rete; può essere
utilizzata per tutte le applicazioni; si può ricorrere
al funzionamento generatorio continuo, ad es.
per calare il carico di una gru
• Svantaggio: non funziona in caso di mancanza di
rete
Frenatura con recupero in rete
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
221
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Quale metodo di frenatura è adatto per le singole applicazioni?
8.7.3.2
Esempi pratici
Metodo di frenatura elettrico
Power Module utilizzabile
Pompe, ventilatori, miscelatori,
compressori, estrusori
Non necessaria
PM240, PM340, PM250,
PM260
Rettificatrici, nastri trasportatori
Frenatura in corrente continua,
frenatura Compound
PM240, PM340
Centrifughe, trasportatori
verticali, dispositivi di
sollevamento, gru, avvolgitori
Frenatura dinamica
PM240, PM340
Frenatura con recupero in rete
PM250, PM260
Frenatura in corrente continua
La frenatura in corrente continua viene utilizzata generalmente per applicazioni senza
recupero dell'energia di rete, nella quale imprimendo una corrente continua è possibile
frenare il motore più rapidamente rispetto alla rampa di decelerazione.
Applicazioni tipiche per la frenatura in corrente continua sono:
● Centrifughe
● Seghe
● Rettificatrici
● Nastri trasportatori
Funzione
ATTENZIONE
Danni al motore dovuti a surriscaldamento
Se il motore frena frequentemente o per periodi prolungati in corrente continua, è possibile
che si surriscaldi. Di conseguenza possono verificarsi danni al motore.
• Sorvegliare la temperatura del motore.
• Se il motore si surriscalda durante l'esercizio, è necessario scegliere un altro metodo di
frenatura o aumentare il tempo di raffreddamento del motore.
Nella frenatura in corrente continua il convertitore emette un comando OFF2 interno per la
durata della diseccitazione del motore p0347 e successivamente imprime la corrente di
frenatura per la durata della frenatura in corrente continua.
La funzione di frenatura in corrente continua è possibile solo per i motori asincroni.
Convertitori con le Control Unit CU240B-2 e CU240E-2
222
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Frenatura in corrente continua al superamento
verso il basso di un numero di giri di avvio
Presupposto: p1230 = 1 e p1231 = 14
Frenatura in corrente continua alla comparsa di
un'anomalia
Presupposto: il numero di anomalia e la reazione
all'anomalia sono assegnati tramite p2100 e
p2101
Frenatura in corrente continua tramite comando
di controllo
Presupposto: p1231 = 4 e p1230 = comando di
controllo, ad es. p1230 = 722.3 (comando di
controllo tramite DI 3)
Frenatura in corrente continua allo spegnimento
del motore
Presupposto: p1231 = 5 o p1230 = 1 e p1231 =
14
Frenatura in corrente continua al superamento verso il basso di un numero di giri di avvio
1. Il numero di giri del motore ha superato il numero di giri di avvio.
2. Il convertitore attiva la frenatura in corrente continua non appena il numero di giri del
motore scende al di sotto del numero di giri di avvio.
Frenatura in corrente continua alla comparsa di un'anomalia
1. Si verifica un'anomalia assegnata alla reazione frenatura in corrente continua.
2. Il motore frena sulla rampa di decelerazione fino al numero di giri di avvio per la frenatura
in corrente continua.
3. Inizia la frenatura in corrente continua.
La frenatura in corrente continua tramite un comando di controllo
1. Il controllore sovraordinato impartisce il comando per la frenatura in corrente continua, ad
es. tramite DI3: p1230 = 722.3.
2. Inizia la frenatura in corrente continua.
Se il controllore sovraordinato revoca il comando durante la frenatura in corrente continua, il
convertitore interrompe la frenatura in corrente continua e il motore accelera fino al proprio
valore di riferimento.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
223
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Frenatura in corrente continua allo spegnimento del motore
1. Il controllore sovraordinato disinserisce il motore (OFF1 o OFF3).
2. Il motore frena sulla rampa di decelerazione fino al numero di giri di avvio per la frenatura
in corrente continua.
3. Inizia la frenatura in corrente continua.
Impostazioni per la frenatura in corrente continua
Parametri
Descrizione
p0347
Tempo di diseccitazione del motore (calcolo dopo la messa in servizio di base)
Se il tempo di diseccitazione è troppo breve, può verificarsi una disinserzione per
sovracorrente.
p1230
Frenatura in corrente continua, attivazione(impostazione di fabbrica: 0)
Sorgente del segnale per l'attivazione della frenatura in corrente continua
p1231
•
Segnale 0: non attiva
•
Segnale 1: attiva
Configurazione della frenatura in corrente continua (Impostazione di fabbrica: 0)
0
4
5
14
Nessuna frenatura in corrente continua
Abilitazione generale della frenatura in corrente continua
Frenatura in corrente continua con OFF1/OFF3
Frenatura in corrente continua sotto il numero di giri di avvio
p1232
Frenatura in corrente continua, corrente di frenatura(impostazione di fabbrica: 0 A)
p1233
Frenatura in corrente continua, durata(impostazione di fabbrica: 1 s)
p1234
Frenatura in corrente continua, numero di giri di avvio(impostazione di fabbrica:
210000 1/min)
r1239
Frenatura in corrente continua, parola di stato
.08
.10
.11
.12
.13
Frenatura in corrente continua
Frenatura in corrente continua pronta
Frenatura in corrente continua selezionata
Frenatura in corrente continua, selezione bloccata internamente
Frenatura in corrente continua con OFF1/OFF3
Tabella 8- 34 Configurazione della frenatura in corrente continua in caso di anomalie
Parametri
Descrizione
p2100
Impostazione del numero di anomalia per reazione all'anomalia (impostazione di
fabbrica: 0)
Specificare il numero di anomalia in corrispondenza del quale si attiva la frenatura in
corrente continua, ad esempio: p2100[3] = 7860 (anomalia esterna 1).
p2101 = 6
Impostazione della reazione all'anomalia (impostazione di fabbrica: 0)
Assegnazione della reazione all'anomalia: p2101[3] = 6.
L'anomalia viene assegnata a un indice di p2100. Assegnare l'anomalia e la reazione all'anomalia
allo stesso indice di p2100 o p2101.
Nel Manuale delle liste del convertitore, nell'elenco "Anomalie e avvisi", sono indicate le possibili
reazioni per ogni anomalia. L'indicazione "DCBREMSE" significa che per questa anomalia è possibile
impostare la frenatura in corrente continua come reazione.
Convertitori con le Control Unit CU240B-2 e CU240E-2
224
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.3.3
Frenatura Compound
Applicazioni tipiche per la frenatura Compound sono:
● Centrifughe
● Seghe
● Rettificatrici
● Nastri trasportatori orizzontali
In queste applicazioni, il motore viene in genere azionato con numero di giri costante e viene
frenato fino al fermo solo a intervalli di tempo molto distanziati.
Modo di funzionamento
Figura 8-23
Frenatura del motore senza e con frenatura Compound attiva
La frenatura Compound impedisce l'aumento della tensione del circuito intermedio oltre un
valore critico. Il convertitore attiva la frenatura Compound in funzione della tensione del
circuito intermedio. A partire da una soglia (r1282) della tensione del circuito intermedio, il
convertitore eroga una corrente continua oltre a quella del motore. La corrente continua
frena il motore e impedisce l'eccessivo aumento della tensione del circuito intermedio.
Nota
La frenatura Compound è attiva solo in combinazione con il controllo U/f.
La frenatura Compound non funziona nei casi seguenti:
• quando è attiva la funzione di riavviamento al volo
• quando è attiva la frenatura in corrente continua
• quando è selezionata la regolazione vettoriale
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
225
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Impostazione e abilitazione della frenatura Compound
Parametri
Descrizione
p3856
Corrente di frenatura Compound (in %)
La corrente di frenatura Compound consente di fissare l'intensità della corrente continua
che viene ulteriormente generata in caso di arresto del motore nel funzionamento con
controllo U/f per l'aumento dell'azione di frenatura.
p3856 = 0
Frenatura Compound bloccata
p3856 = 1 … 250
Picco di corrente della corrente continua di frenatura in % della corrente nominale del
motore (p0305)
Suggerimento: p3856 < 100% × (r0209 - r0331) / p0305 / 2
r3859.0
Parola di stato frenatura Compound
r3859.0 = 1: la frenatura Compound è attiva
ATTENZIONE
Danni al motore nella frenatura Compound dovuti a surriscaldamento
Se il motore frena troppo a lungo o troppo frequentemente, il motore si surriscalda. Di
conseguenza possono verificarsi danni al motore.
Sorvegliare la temperatura del motore. Se il motore si surriscalda durante l'esercizio, è
necessario scegliere un altro metodo di frenatura o aumentare il tempo di raffreddamento
del motore.
8.7.3.4
Frenatura dinamica
Applicazioni tipiche per la frenatura dinamica sono:
● Nastri trasportatori orizzontali
● Nastri trasportatori verticali e obliqui
● Dispositivi di sollevamento
In queste applicazioni è necessario un comportamento del motore dinamico con numeri di
giri diversi o un cambiamento di direzione costante.
Modo di funzionamento
CAUTELA
Rischio di ustioni al contatto con una resistenza di frenatura calda
Una resistenza di frenatura raggiunge temperature elevate durante il funzionamento. In
caso di contatto con la resistenza di frenatura sussiste il pericolo di ustioni.
• Non toccare la resistenza di frenatura durante il funzionamento.
Convertitori con le Control Unit CU240B-2 e CU240E-2
226
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Il convertitore comanda il chopper di frenatura in base alla tensione nel circuito intermedio.
La tensione del circuito intermedio aumenta non appena il convertitore riceve la potenza
generatoria che si produce durante la frenatura del motore. Il chopper di frenatura converte
in calore questa potenza nella resistenza di frenatura. Questo impedisce l'aumento della
tensione del circuito intermedio oltre il valore limite Vcirc int, max.
Figura 8-24
Rappresentazione temporale semplificata della frenatura dinamica
Collegamento della resistenza di frenatura
AVVERTENZA
Pericolo di lesioni causate da gas combusti in caso di impiego di una resistenza di
frenatura non adatta
Una resistenza di frenatura non adatta può incendiarsi durante il funzionamento. Ne
possono conseguire i seguenti pericoli:
• Sviluppo di gas combusti
• Propagazione dell'incendio a causa di fiamme libere
Rimedio:
• Utilizzare solo le resistenze di frenatura prescritte.
• Mantenere distanze sufficienti tra la resistenza di frenatura e gli altri componenti.
• Provvedere a una ventilazione adeguata.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
227
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Procedura
Per collegare la resistenza di frenatura al convertitore, procedere nel modo seguente:
1. Collegare la resistenza di frenatura ai morsetti R1 e R2 del Power Module.
2. Collegare la messa a terra della resistenza di frenatura direttamente alla barra di messa a
terra del quadro elettrico. Non è ammessa la messa a terra della resistenza di frenatura
tramite i morsetti PE del Power Module.
3. Se deve essere rispettata la conformità con le direttive EMC, prestare attenzione alla
schermatura.
4. Valutare la sorveglianza di temperatura della resistenza di frenatura (morsetti T1 e T2) in
modo tale che il convertitore segnali un'anomalia in caso di sovratemperatura della
resistenza.
Questo si può realizzare nei seguenti due modi:
– Separare il convertitore dalla rete mediante una protezione, non appena interviene la
sorveglianza della temperatura.
– Interconnettere il contatto della sorveglianza della temperatura della resistenza di
frenatura con un ingresso digitale libero a scelta sul convertitore.
Impostare la funzione di questo ingresso digitale come anomali esterna, ad es. per
l'ingresso digitale DI 3: p2106 = 722.3.
Figura 8-25
Collegamento della resistenza di frenatura (come esempio: sorveglianza della
temperatura tramite l'ingresso digitale DI 3)
La resistenza di frenatura è stata collegata al convertitore.
Ulteriori informazioni sulla resistenza di frenatura sono disponibili nelle istruzioni di
montaggio del Power Module PM240
(http://support.automation.siemens.com/WW/view/it/30563173/133300).
Convertitori con le Control Unit CU240B-2 e CU240E-2
228
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Procedura: Impostazione della frenatura dinamica
Per utilizzare in modo ottimale la resistenza di frenatura collegata è necessario conoscere la
potenza di frenatura nell'applicazione specifica.
Tabella 8- 35 Parametri
Parametri
Descrizione
p0219
Potenza di frenatura della resistenza di frenatura (impostazione di fabbrica: 0 kW)
Impostare la potenza di frenatura massima che la resistenza di frenatura deve applicare
nell'applicazione specifica.
Con basse potenze di frenatura, il convertitore può prolungare il tempo di decelerazione
del motore.
Esempio: nell'applicazione utilizzata il motore frena ogni 10 s. La potenza di frenatura
applicata dalla resistenza di frenatura deve essere in questo caso di 1 kW per 2 s.
Impostare la resistenza di frenatura con una potenza continua di
1 kW × 2 s / 10 s = 0,2 kW e applicando la potenza di frenatura massima: p0219 = 1
(kW).
p0844
Nessun arresto per inerzia / arresto per inerzia (OFF2) sorgente del segnale 1
p0844 = 722.x
Sorveglianza del surriscaldamento della resistenza di frenatura con
l'ingresso digitale x del convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
229
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.3.5
Frenatura con recupero in rete
Applicazioni tipiche per la frenatura con recupero dell'energia in rete sono:
● Centrifughe
● Svolgitore
● Gru e dispositivi di sollevamento
In queste applicazioni il motore deve frenare spesso o per periodi prolungati.
Per eseguire la frenatura con recupero in rete occorre il Power Module PM250 o PM260.
Il convertitore può recuperare in rete fino al 100 % della sua potenza (riferito al carico di
base "High Overload", vedere la sezione Dati tecnici, Power Module (Pagina 336)).
Impostazione della frenatura con recupero in rete
Parametri
Descrizione
Limitazione del recupero energia con controllo U/f (p1300 < 20)
p0640
Fattore di sovraccarico motore
Una limitazione della potenza generatoria non è possibile direttamente con il controllo
U/f, ma solo indirettamente tramite limitazione della corrente del motore.
Se la corrente supera questo valore per oltre 10 s, il convertitore disinserisce il motore
con l'anomalia F07806.
Limitazione del recupero di energia con regolazione vettoriale (p1300 ≥ 20)
p1531
Limitazione della potenza generatoria
Tramite p1531 viene impostato il carico generatorio massimo come valore negativo.
(-0,01 … -100000,00 kW).
Non sono consentiti valori della parte di potenza superiori a quello nominale (r0206).
8.7.3.6
Freno di stazionamento motore
Il freno di stazionamento motore impedisce la rotazione del motore disinserito. Il convertitore
dispone di una logica interna per il comando ottimale del freno di stazionamento motore.
Il comando del freno di stazionamento motore all'interno del convertitore è particolarmente
adatto per i nastri trasportatori orizzontali, obliqui e verticali.
Il freno di stazionamento motore può essere utile anche in alcune applicazioni per pompe o
ventilatori, per evitare che il motore disattivato possa ruotare nella direzione sbagliata a
causa del flusso del liquido o dell'aria.
Convertitori con le Control Unit CU240B-2 e CU240E-2
230
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Collegamento di Brake Relay e freno di stazionamento motore
Il Brake Relay funge da interfaccia tra il
Power Module e la bobina del freno di un
motore.
Il Brake Relay può essere montato su una
piastra di montaggio, sulla parete
dell'armadio elettrico o sul blocco dei
connettori schermati del convertitore.
Ulteriori informazioni si trovano nelle relative
istruzioni di installazione: Istruzioni di
montaggio del Brake Relay
(http://support.automation.siemens.com/WW/
view/it/23623179).
• Collegare il Brake Relay tramite il cavo preformato in dotazione con il Power Module.
• Power Module FSA … FSC:
– Collegare il Brake Relay al connettore sul
lato frontale del Power Module.
– Posare il cavo di controllo nel passacavo
sul Power Module.
• Power Module FSD … FSF:
– Collegare il Brake Relay al connettore
sul lato inferiore del Power Module.
• Collegare il freno di stazionamento motore ai morsetti del Brake Relay:
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
231
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Funzione dopo un comando OFF1 e OFF3
Il convertitore comanda come segue il freno di stazionamento motore:
● Dopo il comando ON (inserzione motore) il convertitore magnetizza il motore.
● Trascorso il tempo di magnetizzazione (p0346), il convertitore esegue il comando di
apertura del freno.
● Fino allo scadere del tempo p1216, il convertitore mantiene il motore in stato di fermo. In
questo lasso di tempo il freno di stazionamento motore deve essersi aperto.
● Trascorso il tempo di apertura del freno, il motore accelera fino a raggiungere il valore di
riferimento del numero di giri.
● Dopo il comando OFF (OFF1 oppure OFF3) il motore frena fino ad arrestarsi.
● Durante la frenatura il convertitore confronta con la soglia del numero di giri p1226 il
riferimento di velocità e la velocità attuale:
Se il riferimento di velocità scende sotto la soglia p1226, il convertitore avvia il tempo
p1227.
Se il numero di giri attuale scende sotto la soglia p1226, il convertitore avvia il tempo
p1228.
● Non appena il primo dei due tempi p1227 o p1228 è scaduto, il convertitore emette il
comando di chiusura del freno.
Il motore si arresta, ma rimane acceso.
● Trascorso il tempo di chiusura freno p1217, il convertitore spegne il motore.
Entro questo tempo il freno di stazionamento motore deve essersi chiuso.
Figura 8-26
Comando del freno di stazionamento motore all'inserzione e alla disinserzione del
motore
Convertitori con le Control Unit CU240B-2 e CU240E-2
232
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Funzione dopo OFF2 o selezione della funzione di sicurezza "Safe Torque Off" (STO)
Il tempo di chiusura del freno non viene considerato in presenza dei seguenti segnali:
● Comando OFF2
● Dopo che è stata selezionata la funzione di sicurezza "Safe Torque Off" (STO)
Dopo questi comandi il convertitore chiude immediatamente il freno di stazionamento
motore, indipendentemente dal numero di giri dello stesso.
Figura 8-27
Attivazione del freno di stazionamento motore dopo il comando OFF2 o dopo
l'attivazione di STO
Messa in servizio del freno di stazionamento motore
PERICOLO
Pericolo di morte per caduta del carico
Un'errata impostazione della funzione "Freno di stazionamento motore" comporta il pericolo
di morte dovuto alla caduta del carico nelle applicazioni come i dispositivi di sollevamento,
le gru o gli elevatori.
• Per la messa in servizio della funzione "Freno di stazionamento motore" è necessario
assicurare i carichi pericolosi, ricorrendo ad es. alle seguenti soluzioni:
– Abbassare il carico fino al suolo
– Recintando e chiudendo la zona pericolosa
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
233
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Presupposto
Il freno di stazionamento motore è collegato al convertitore.
Procedura
Procedere come segue per mettere in servizio la funzione "Freno di stazionamento motore"
con un Operator Panel:
1. Impostare p1215 = 1.
La funzione "Freno di stazionamento motore" è abilitata.
2. Controllare il tempo di magnetizzazione p0346; il tempo di magnetizzazione viene
preimpostato al momento della messa in servizio e deve essere maggiore di zero.
3. Ricavare dai dati tecnici i tempi di apertura e chiusura del freno di stazionamento motore.
– A seconda delle dimensioni del freno, i tempi di apertura sono compresi tra 25 ms e
500 ms.
– A seconda delle dimensioni del freno, i tempi di chiusura sono compresi tra 15 ms e
300 ms.
4. Impostare i seguenti parametri nel convertitore per adattarli ai tempi di apertura e
chiusura del freno:
– Tempo di apertura ≤ p1216.
– Tempo di chiusura ≤ p1217.
5. Accendere il motore.
6. Verificare il comportamento di accelerazione dell'azionamento subito dopo l'accensione
del motore:
– Se l'apertura del freno è troppo ritardata, il convertitore accelera il motore a scatti
contrastanti la forza del freno chiuso.
Aumentare in questo caso il tempo di apertura p1216.
– Se il motore attende troppo a lungo prima di accelerare dopo l'apertura del freno,
ridurre il tempo di apertura p1216.
7. Se dopo l'accensione del motore il carico cade, occorre aumentare la coppia del motore
all'apertura del freno di stazionamento. A seconda del tipo di regolazione si devono
impostare diversi parametri:
– Funzionamento U/f (p1300 = da 0 a 3):
Aumentare gradualmente il valore di p1310.
Aumentare gradualmente il valore di p1351.
– Regolaoriale (p1300 ≥ 20):
Aumentare in piccoli incrementi il valore di p1475.
8. Disinserire il motore.
9. Verificare il comportamento di frenatura dell'azionamento subito dopo lo spegnimento del
motore:
– Se la chiusura del freno è troppo ritardata, il carico cade per un istante prima che il
freno si chiuda.
Aumentare in questo caso il tempo di chiusura p1217.
– Se il motore attende troppo a lungo dopo la chiusura del freno prima che il
convertitore disinserisca il motore, ridurre il tempo di chiusura p1217.
La funzione "Freno di stazionamento motore" è stata messa in servizio.
Convertitori con le Control Unit CU240B-2 e CU240E-2
234
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Tabella 8- 36 Impostazione della logica di comando del freno di stazionamento motore
Parametri
Descrizione
p1215 = 1
Abilitazione freno di stazionamento motore
0 freno di stazionamento motore bloccato (impostazione di fabbrica)
1 freno di stazionamento motore come controllo sequenziale
2: freno di stazionamento motore aperto
3: freno di stazionamento motore come controllo sequenziale, collegamento tramite
BICO
p1216
Tempo di apertura freno di stazionamento motore (impostazione di fabbrica 0,1 s)
p1216 > runtime relè del comando freno + runtime del freno
p1217
Tempo di chiusura freno di stazionamento motore (impostazione di fabbrica 0,1 s)
p1217> runtime relè del comando freno + tempo di chiusura del freno
r0052.12
Comando "Freno di stazionamento motore aperto"
Tabella 8- 37 Impostazioni avanzate
Parametri
Descrizione
p0346
Tempo di magnetizzazione (impostazione di fabbrica 0 s)
Tempo nel quale avviene la magnetizzazione di un motore asincrono. Il convertitore
calcola questo parametro tramite p0340 = 1 o 3.
p0855
Apertura forzata del freno di stazionamento motore (impostazione di fabbrica 0)
p0858
Chiusura forzata del freno di stazionamento motore (impostazione di fabbrica 0)
p1226
Soglia numero di giri riconoscimento fermo (impostazione di fabbrica 20 1/min)
Alla frenatura con OFF1 o OFF3 il fermo viene riconosciuto quando si scende al di
sotto di questa soglia e viene avviato il tempo di sorveglianza p1227 e p1228
p1227
Tempo di sorveglianza riconoscimento fermo (impostazione di fabbrica 300 s)
p1228
Ritardo cancellazione impulsi(impostazione di fabbrica 0,01 s)
p1351
Frequenza di avvio freno di stazionamento motore (impostazione di fabbrica 0 %)
Impostazione del valore della frequenza all'uscita della compensazione dello
scorrimento all'avvio del freno di stazionamento motore.
Con l'impostazione del parametro p1351 > 0 viene eseguita automaticamente la
compensazione dello scorrimento.
p1352
Frequenza di avvio per freno di stazionamento motore (impostazione di fabbrica
1351)
Impostazione della sorgente del segnale per il valore della frequenza all'uscita della
compensazione dello scorrimento all'avvio del freno di stazionamento motore.
p1475
Regolatore numero di giri valore di coppia per freno di stazionamento motore
(impostazione di fabbrica 0)
Impostazione della sorgente del segnale per il valore di impostazione della coppia
all'avvio del freno di stazionamento motore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
235
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.4
Reinserzione e riavviamento al volo
8.7.4.1
Riavviamento al volo - Inserzione a motore funzionante
Se il motore viene inserito prima che la rotazione sia terminata, è altamente probabile che si
verifichi un guasto per sovracorrente (errore di sovracorrente F07801). Esempi di
applicazioni con rotazione involontaria del motore subito prima dell'inserzione:
● Il motore gira dopo una breve interruzione di rete.
● Un flusso d'aria fa girare una ventola.
● Il motore si mette in moto per un carico con elevato momento di inerzia.
La funzione "Riavviamento al
volo" sincronizza dapprima la
frequenza di uscita del
convertitore con il numero di giri
del motore dopo il comando ON
e quindi accelera il motore fino al
valore di riferimento.
Se il convertitore aziona più motori contemporaneamente, la funzione "Riavviamento al volo"
deve essere utilizzata solo quando il numero di giri di tutti i motori è sempre identico
(azionamento di gruppo con accoppiamento meccanico).
Tabella 8- 38 Impostazione di base
Parametri
Descrizione
p1200
Riavviamento al volo, modo operativo (impostazione di fabbrica: 0)
0
1
4
Riavviamento al volo bloccato
Riavviamento al volo abilitato, ricerca del motore in entrambe le direzioni,
avviamento in direzione del valore di riferimento
Riavviamento al volo abilitato, ricerca solo in direzione del valore di riferimento
Convertitori con le Control Unit CU240B-2 e CU240E-2
236
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Tabella 8- 39 Impostazioni avanzate
Parametri
Descrizione
p1201
Sorgente segnale abilitazione riavviamento al volo (impostazione di fabbrica: 1)
Definisce un comando di controllo, ad es. un ingresso digitale, tramite il quale viene
abilitata la funzione di riavviamento al volo.
p1202
Corrente di ricerca riavviamento al volo (impostazione di fabbrica 100 %)
Definisce la corrente di ricerca riferita alla corrente di magnetizzazione del motore
(r0331) che passa nel motore durante il riavviamento al volo.
p1203
Fattore velocità di ricerca riavviamento al volo (impostazione di fabbrica 100 %)
Il valore influenza la velocità con cui viene modificata la frequenza di uscita durante il
riavviamento al volo. Un valore maggiore prolunga il tempo di ricerca.
Se il convertitore non trova il motore, ridurre la velocità di ricerca (aumentare p1203).
8.7.4.2
Inserzione automatica
La reinserzione automatica contiene due funzioni diverse:
● Il convertitore tacita le anomalie automaticamente.
● Il convertitore reinserisce automaticamente il motore dopo la comparsa di un'anomalia o
dopo un'interruzione di rete.
Il convertitore interpreta i seguenti eventi come interruzione di rete:
● Il convertitore segnala l'anomalia F30003 (sottotensione nel circuito intermedio) perché la
tensione di rete del convertitore è stata interrotta per un breve periodo.
● La durata dell'interruzione dell'alimentazione di tensione del convertitore è tale che il
convertitore viene disattivato.
AVVERTENZA
Pericolo di lesioni durante il riavviamento automatico della macchina
Con la "reinserzione automatica" attivata (p1210 > 1) il motore si avvia automaticamente
dopo un'interruzione di rete. I movimenti effettuati dalla macchina possono causare
lesioni gravi.
• Impedire l'accesso accidentale alla macchina.
• Disinserire la reinserzione automatica prima di eseguire interventi sulla macchina.
Messa in servizio della reinserzione automatica
Procedura
Per eseguire la messa in servizio dell'inserzione automatica, procedere nel seguente modo:
1. Se sussiste la possibilità che il motore continui a girare per un tempo prolungato dopo
un'interruzione di rete o un'anomalia, occorre inoltre attivare la funzione "Riavviamento al
volo", vedere Riavviamento al volo - Inserzione a motore funzionante (Pagina 236).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
237
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
2. Selezionare il modo di reinserzione automatica adatto all'applicazione tramite p1210.
Figura 8-28
Selezione del modo di reinserzione automatica
3. Impostare i parametri della reinserzione automatica.
L'effetto dei parametri è descritto nella figura e nella tabella seguenti.
Convertitori con le Control Unit CU240B-2 e CU240E-2
238
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
1
2
3
Il convertitore tacita le anomalie automaticamente alle condizioni seguenti:
•
p1210 = 1 o 26: sempre.
•
p1210 = 4 o 6: quando il comando di inserzione del motore viene applicato a un ingresso digitale
o tramite il bus di campo (ON/OFF1 = 1).
•
p1210 = 14 o 16: mai.
Il convertitore tenta di inserire automaticamente il motore alle condizioni seguenti:
•
p1210 = 1: mai.
•
p1210 = 4, 6, 14, 16 o 26: quando il comando di inserzione del motore viene applicato a un
ingresso digitale o tramite il bus di campo (ON/OFF1 = 1).
Se entro un secondo dopo il riavviamento al volo e la magnetizzazione n (r0056.4=1) non si verifica
alcuna anomalia, il tentativo di avviamento è riuscito.
Figura 8-29
Comportamento temporale della reinserzione automatica
La messa in servizio della reinserzione automatica è completata.
Parametri per l'impostazione della reinserzione automatica
Parametri
Spiegazione
p1210
Modo di reinserzione automatica(impostazione di fabbrica: 0)
0:
1:
4:
6:
14:
16:
26:
p1211
Blocco reinserzione automatica.
Tacitazione di tutte le anomalie senza reinserzione.
Reinserzione dopo interruzione di rete senza altri tentativi di avviamento.
Reinserzione dopo anomalia con ulteriori tentativi di riavviamento.
Reinserzione dopo interruzione di rete dopo tacitazione manuale.
Reinserzione dopo anomalia dopo tacitazione manuale.
Tacitazione di tutte le anomalie e reinserzione con ON/OFF1 = 1.
Reinserzione automatica, tentativi di avviamento(impostazione di fabbrica: 3)
Questo parametro è attivo solo con le impostazioni p1210 = 4, 6, 14, 16, 26.
Con p1211 si definisce il numero massimo di tentativi di riavviamento. Dopo ogni
tacitazione riuscita, il convertitore diminuisce di 1 il suo contatore interno dei tentativi di
riavviamento.
Con p1211 = n vengono effettuati max. n + 1 tentativi di riavviamento. Dopo n + 1
tentativi di riavviamento falliti, viene emessa l'anomalia F07320.
Il convertitore reimposta il contatore dei tentativi di riavviamento al valore di p1211 se è
soddisfatta una delle condizioni seguenti:
•
Dopo un tentativo di riavviamento riuscito è trascorso il tempo impostato in p1213[1].
•
Dopo l'anomalia F07320 si disinserisce il motore (OFF1) e si conferma l'anomalia.
•
Si modifica il valore iniziale p1211 oppure il modo p1210.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
239
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Parametri
Spiegazione
p1212
Reinserzione automatica, tempo di attesa tentativo avviamento(impostazione di
fabbrica: 1,0 s)
Questo parametro è attivo solo con le impostazioni p1210 = 4, 6, 26.
Esempi di impostazione di questo parametro:
1. Dopo una mancanza rete deve passare un certo tempo prima che il motore possa
essere reinserito, ad es. perché altri componenti della macchina non sono pronti per
il funzionamento. In questo caso impostare p1212 a un valore maggiore del tempo
dopo il quale sono state eliminate tutte le cause di anomalia.
2. Durante il funzionamento si verifica un'anomalia del convertitore. Tanto più basso è
il valore di p1212, quanto prima il convertitore tenta di riavviare il motore.
p1213[0]
Reinserzione automatica, tempo di sorveglianza
per riavviamento(impostazione di fabbrica: 60 s)
Questo parametro è attivo solo con le impostazioni p1210 = 4, 6, 14, 16, 26.
Con questa sorveglianza si limita il tempo in cui il convertitore può tentare di riavviare
automaticamente il motore.
La sorveglianza inizia al riconoscimento di un'anomalia e termina non appena il
tentativo di riavviamento riesce. Se il motore non è avviato correttamente una volta
trascorso il tempo di sorveglianza, viene emessa l'anomalia F07320.
Impostare il tempo di sorveglianza a una valore maggiore della somma dei tempi
seguenti:
+ p1212
+ tempo necessario al convertitore per l'avviamento al volo del motore.
+ tempo di magnetizzazione del motore (p0346)
+ 1 secondo
Con p1213 = 0 si disattiva la sorveglianza.
p1213[1]
Reinserzione automatica, tempo di sorveglianza
per resettare il contatore anomalie (impostazione di fabbrica: 0 s)
Questo parametro è attivo solo con le impostazioni p1210 = 4, 6, 14, 16, 26.
Con questo tempo di sorveglianza si impedisce che le anomalie che si verificano
sempre nell'ambito di un determinato intervallo di tempo vengano sempre tacitate
automaticamente.
La sorveglianza inizia appena riesce un tentativo di avviamento e termina una volta
trascorso il tempo di sorveglianza.
Se il convertitore ha eseguito più di (p1211 + 1) tentativi di avviamento riusciti nel tempo
di sorveglianza p1213[1], interrompe la reinserzione automatica ed emette l'anomalia
F07320. Per reinserire il motore, confermare l'anomalia e impostare ON/OFF1 = 1.
Ulteriori informazioni sono disponibili nella lista dei parametri del Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
240
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Impostazioni avanzate
Se si desidera sopprimere la reinserzione automatica per determinate anomalie, occorre
immettere i corrispondenti numeri di anomalia in p1206[0 … 9].
Esempio: p1206[0] = 07331 ⇒ In caso di anomalia F07331 non viene eseguito alcun riavvio.
Questa soppressione della reinserzione automatica funziona solo con l'impostazione
p1210 = 6, 16 o 26.
AVVERTENZA
Danni a persone e a cose
Nella comunicazione tramite l'interfaccia del bus di campo si riavvia il motore con il
parametro p1210 = 6, anche quando la comunicazione è interrotta, Questo significa che il
controllo non può arrestare il motore. Per impedire questa pericolosa situazione, nel
parametro p1206 è necessario immettere il codice anomalia dell'errore di comunicazione.
Esempio: Un'interruzione della comunicazione tramite PROFIBUS viene segnalata con il
codice anomalia F01910. Impostare di conseguenza p1206[n] = 1910 (n = 0 … 9).
8.7.5
Regolatore di tecnologia PID
8.7.5.1
Panoramica
Il regolatore regola le grandezze di processo, ad es. pressione, temperatura, livello o
portata.
Figura 8-30
Esempio di regolatore PID come regolatore del livello di riempimento
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
241
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.5.2
Impostazione del regolatore
Rappresentazione semplificata del regolatore
Il regolatore tecnologico è eseguito come regolatore PID (regolatore con componente
proporzionale, integrale e differenziale) e quindi è adattabile in modo estremamente
flessibile.
Figura 8-31
Rappresentazione semplificata del regolatore
Impostazione del regolatore
Parametri
Nota
p2200 = 1
Abilitare il regolatore PID.
p1070 = 2294
Interconnettere il valore di riferimento principale del numero di giri con l'uscita del
regolatore.
p2253 = …
Definire il valore di riferimento per il regolatore.
Esempio:
p2253 = 2224: il convertitore interconnette il valore di riferimento fisso p2201 con il
valore di riferimento del regolatore.
p2220 = 1: è selezionato il valore di riferimento fisso p2201.
p2264 = …
Definire il valore attuale per il regolatore.
Esempio: in p2264 = 755[0] l'ingresso analogico 0 è la sorgente per il valore
attuale.
p2257, p2258
Definire il tempo di accelerazione e decelerazione [s]
p2274
Differenziazione costante di tempo [s]
La differenziazione migliora il comportamento di regolazione con grandezze ad
inerzia elevata, ad es. una regolazione di temperatura.
p2274 = 0: la differenziazione è disattivata.
Convertitori con le Control Unit CU240B-2 e CU240E-2
242
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Parametri
Nota
p2280
Guadagno proporzionale KP
p2285
Tempo d'integrazione TN [s]
Senza tempo d'integrazione il regolatore non può regolare completamente gli
scostamenti tra valore di riferimento e valore attuale.
p2285 = 0: il tempo d'integrazione è disattivato.
Impostazioni avanzate
Parametri
Nota
Limitazione dell'uscita del regolatore
Nell'impostazione di fabbrica l'uscita del regolatore è limitata a ± il numero di giri massimo. Questa
limitazione deve essere eventualmente modificata in funzione dell'applicazione utilizzata.
Esempio: l'uscita del regolatore fornisce il valore di riferimento del numero di giri per una pompa. La
pompa deve girare solo in direzione positiva.
p2297 = 2291
Interconnettere il limite superiore con p2291.
p2298 = 2292
Interconnettere il limite inferiore con p2292.
p2291
Limite superiore per l'uscita del regolatore, ad es.: p2291 =100
p2292
Limite inferiore per l'uscita del regolatore, ad es.: p2292 = 0
Manipolazione del valore attuale del regolatore
p2267, p2268
Limitare il valore attuale
p2269
Scalare il valore attuale
p2271
Invertire il valore attuale
p2270
Valore attuale
Per ulteriori informazioni vedere lo schema logico 7958 del Manuale delle liste.
8.7.5.3
Ottimizzazione regolatore
Impostazione del regolatore PID da punti di vista pratici
Procedura
Per impostare il regolatore PID, procedere nel seguente modo:
1. Impostare temporaneamente a zero il tempo di accelerazione e decelerazione del
generatore di rampa (p2257 e p2258).
2. Preimpostare un gradino di setpoint e osservare il valore attuale corrispondente, ad es.
con la funzione Trace di STARTER.
L'osservazione del comportamento del regolatore deve durare tanto più a lungo quanto è
maggiore l'inerzia con cui reagisce il processo da regolare. In alcuni frangenti, ad es. in
una regolazione di temperatura, è necessario attendere diversi minuti prima di poter
valutare il comportamento del regolatore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
243
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Comportamento del regolatore ottimale
per applicazioni che non ammettono
sovraoscillazioni.
Il valore attuale si avvicina al valore di
riferimento senza sovraoscillazioni
significative.
Comportamento del regolatore ottimale
per una rapida regolazione in salita e in
discesa dei componenti che generano
disturbi.
Il valore attuale si avvicina al valore di
riferimento con una leggera
sovraoscillazione (massimo il 10% del
gradino di setpoint).
Il valore attuale si avvicina al valore di
riferimento solo lentamente.
•
Aumentare la quota proporzionale KP
e ridurre il tempo di integrazione TN.
Il valore attuale si avvicina al valore di
riferimento solo lentamente con leggere
vibrazioni.
•
Aumentare la quota proporzionale KP
e ridurre il tempo di prearresto TD
(tempo di differenziazione).
Il valore attuale si avvicina rapidamente
al valore di riferimento, ma la
sovraoscillazione è consistente.
•
Ridurre la quota proporzionale KP e
aumentare il tempo di integrazione
TN.
3. Reimpostare il tempo di accelerazione e decelerazione del generatore di rampa sul
valore originario.
Il regolatore PID è stato impostato.
Convertitori con le Control Unit CU240B-2 e CU240E-2
244
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.6
Sorveglianza della coppia di carico (protezione dell'impianto)
In molte applicazioni è opportuno sorvegliare la coppia del motore:
● Applicazioni nelle quali è possibile sorvegliare indirettamente il numero di giri del carico
tramite la coppia di carico. Ad esempio, una coppia ridotta è indice di rottura della cinghia
di azionamento in ventilatori o nastri trasportatori.
● Applicazioni che devono essere protette contro il sovraccarico o il blocco, ad es. estrusori
o miscelatori.
● Applicazioni nelle quali il funzionamento a vuoto del motore rappresenta un evento non
ammesso, ad es. pompe.
Funzioni per la sorveglianza della coppia di carico
Il convertitore sorveglia la coppia del motore in vari modi:
● Sorveglianza del funzionamento a vuoto
Il convertitore genera una segnalazione quando la coppia del motore è troppo bassa.
● Protezione contro il blocco
Il convertitore genera una segnalazione quando il numero di giri del motore non può
seguire il valore di riferimento del numero di giri nonostante la coppia massima.
● Protezione antistallo
Il convertitore genera una segnalazione quando la regolazione del convertitore ha perso
l'orientamento del motore.
● Sorveglianza della coppia in funzione del numero di giri
Il convertitore misura la coppia attuale e la confronta con una curva caratteristica
impostata di numero di giri/coppia
Figura 8-32
Parametri per la sorveglianza della coppia di carico
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
245
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Tabella 8- 40 Parametrizzazione delle sorveglianze
Parametri
Descrizione
Sorveglianza del funzionamento a vuoto
p2179
Limite di corrente per il riconoscimento del funzionamento a vuoto
Una corrente del convertitore al di sotto di questo valore provoca la segnalazione
"Nessun carico"
p2180
Ritardo per la segnalazione "Nessun carico"
Protezione contro il blocco
p2177
Ritardo per la segnalazione "Motore bloccato"
Protezione antistallo
p2178
Ritardo per la segnalazione "Motore in stallo"
p1745
Scostamento tra valore di riferimento e valore attuale del flusso del motore a partire
dal quale viene generata la segnalazione "Motore in stallo"
Il parametro viene valutato solo in caso di regolazione vettoriale senza encoder
Sorveglianza della coppia in funzione del numero di giri
p2181
Sorveglianza del carico, reazione
Impostazione della reazione in caso di analisi della sorveglianza del carico.
0: sorveglianza carico disattivata
>0: sorveglianza del carico attivata
p2182
Sorveglianza carico, soglia di numero di giri 1
p2183
Sorveglianza carico, soglia di numero di giri 2
p2184
Sorveglianza carico, soglia di numero di giri 3
p2185
Sorveglianza carico, soglia di coppia 1 superiore
p2186
Sorveglianza carico, soglia di coppia 1 inferiore
p2187
Sorveglianza carico, soglia di coppia 2 superiore
p2188
Sorveglianza carico, soglia di coppia 2 inferiore
p2189
Sorveglianza carico, soglia di coppia 3 superiore
p2190
Sorveglianza carico, soglia di coppia 3 inferiore
p2192
Sorveglianza del carico, tempo di ritardo
Ritardo per la segnalazione "Superamento della fascia di tolleranza della
sorveglianza della coppia"
Per ulteriori informazioni su queste funzioni consultare lo schema logico 8013 e la lista dei
parametri del Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
246
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
8.7.7
Sorveglianza del numero di giri tramite ingresso digitale
La funzione sorveglia il numero di giri o la velocità di un componente di macchina, ad es.:
● Sorveglianza di riduttori, ad es. azionamenti per movimento orizzontale o apparecchi di
sollevamento
● Sorveglianza di cinghie di trasmissione, ad es. di ventilatori o nastri trasportatori
● Protezione contro il blocco
Sorveglianza
Nell'applicazione utilizzata è possibile sorvegliare il numero di giri o la velocità in due modi:
● Perdita di carico:
il convertitore valuta se è un segnale dell'encoder è presente.
● Scostamento del numero di giri:
A partire dal segnale di un encoder collegato, il convertitore calcola un numero di giri e lo
confronta con il numero di giri del motore.
Per la sorveglianza del numero di giri è necessario un datore di segnali, ad esempio un
interruttore di prossimità. Il convertitore valuta il segnale dell'encoder attraverso un ingresso
digitale.
Perdita di carico
Figura 8-33
Sorveglianza della perdita del carico mediante un ingresso digitale
Parametri
Descrizione
p2192
Sorveglianza del carico, ritardo apertura (impostazione di fabbrica 10 s)
Se dopo l'inserzione del motore il segnale "LOW" è presente sul corrispondente
ingresso digitale per un tempo superiore a quello qui impostato, il convertitore
segnala una perdita di carico (F07936).
p2193 = 1…3
Configurazione della sorveglianza del carico (impostazione di fabbrica: 1)
0: sorveglianza disinserita
1: sorveglianza coppia (vedere Sorveglianza della coppia di carico (protezione
dell'impianto) (Pagina 245)) e perdita di carico
2: sorveglianza scostamento numero di giri (vedere oltre) e perdita di carico
3: sorveglianza perdita di carico
p3232 = 722.x
Sorveglianza del carico, rilevamento di avaria (impostazione di fabbrica: 1)
Interconnettere la sorveglianza del carico con un ingresso digitale a scelta.
Ulteriori informazioni sono disponibili nella lista dei parametri e nello schema logico 8013 del
Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
247
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Scostamento del numero di giri
Questa funzione è disponibile solo per le Control Unit CU240E-2… Il sensore di sorveglianza
deve essere collegato all'ingresso digitale 3.
Il convertitore può elaborare una sequenza di impulsi di massimo 32 kHz.
Figura 8-34
Sorveglianza dello scostamento del numero di giri
Il calcolo del numero di giri dal segnale a impulsi dell'ingresso digitale avviene nel "tastatore
di misura".
Il convertitore confronta il numero di giri calcolato con il valore attuale del numero di giri
r2169. La reazione del convertitore in caso di scostamento troppo elevato è impostabile con
p2181.
Parametri
Descrizione
p0490
Inversione tastatore di misura (impostazione di fabbrica 0000bin)
Con il 3° bit del valore del parametro vengono invertiti i segnali di ingresso
dell'ingresso digitale 3 per il tastatore di misura.
p0580 = 23
Tastatore di misura, morsetto di ingresso(impostazione di fabbrica 0)
Interconnessione dell'ingresso del tastatore di misura con DI 3.
p0581
Tastatore di misura fronte (impostazione di fabbrica 0)
Fronte per la valutazione del segnale del tastatore di misura per la misurazione
del valore attuale del numero di giri
0: fronte 0/1
1: fronte 1/0
p0582
Impulsi tastatore di misura per giro (impostazione di fabbrica 1)
Numero di impulsi per giro.
p0583
Tempo di misura massimo tastatore di misura (impostazione di fabbrica 10 s)
Tempo di misura massimo per il tastatore di misura. Se prima che sia trascorso il
tempo di misura massimo non vengono rilevati impulsi, il convertitore azzera il
valore attuale del numero di giri in r0586.
Al successivo impulso il conteggio del tempo si riavvia.
p0585
Fattore di riduzione tastatore di misura (impostazione di fabbrica 1)
Il convertitore moltiplica il numero di giri misurato per il fattore di riduzione prima
di visualizzarlo in r0586.
p2181
Sorveglianza del carico, reazione (impostazione di fabbrica 0)
Reazione nella valutazione della sorveglianza del carico.
0 Sorveglianza carico disattivata
1 A07920 in caso di numero di giri troppo basso
2 A07921 in caso di numero di giri troppo elevato
Convertitori con le Control Unit CU240B-2 e CU240E-2
248
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Parametri
Descrizione
3 A07922 in caso di numero di giri fuori tolleranza
4 F07923 in caso di numero di giri troppo basso
5 F07924 in caso di numero di giri troppo elevato
6 F07925 in caso di numero di giri fuori tolleranza
p2192
Sorveglianza del carico, ritardo apertura (impostazione di fabbrica 10 s)
Tempo di ritardo di apertura per la valutazione della sorveglianza del carico.
p2193 = 2
Configurazione della sorveglianza del carico (impostazione di fabbrica: 1)
2: sorveglianza dello scostamento di numero di giri e della perdita del carico.
p3230 = 586
Sorveglianza del carico, valore attuale di numero di giri (impostazione di fabbrica
0)
Interconnessione del risultato del calcolo del numero di giri con la valutazione
della sorveglianza del numero di giri.
p3231
Sorveglianza del carico, scostamento del numero di giri (impostazione di
fabbrica 150 1/min)
Scostamento ammesso del numero di giri della sorveglianza del carico.
Ulteriori informazioni sono disponibili nella lista dei parametri e nello schema logico 8013 del
Manuale delle liste.
8.7.8
Funzioni logiche e aritmetiche mediante blocchi funzionali
I blocchi funzione liberi consentono di realizzare ulteriori interconnessioni dei segnali
all'interno del convertitore. Per utilizzare i blocchi funzione liberi, interconnettere gli ingressi e
le uscite dei blocchi funzione con i segnali adatti.
Sono disponibili ad es. i seguenti blocchi funzione liberi:
● Blocchi logici AND, OR, XOR, NOT
● Blocchi aritmeticiADD, SUB, MUL, DIV, AVA (generatore valore assoluto), NCM
(comparatore numerico), PLI (linea poligonale)
● Blocchi temporali MFP (generatore di impulsi), PCL (riduzione di impulsi), PDE (ritardo di
inserzione), PDF (ritardo di disinserzione), PST (prolungamento di impulsi)
● Memoria: RSR (flip-flop RS), DSR (flip-flop D)
● Interruttori NSW (commutatore numerico) BSW (commutatore binario)
● Regolatori LIM (limitatore), PT1 (blocco di livellamento), INT (integratore), DIF (blocco
differenziatore)
● Monitoraggio del valore limite LVM
Una panoramica di tutti i blocchi funzione liberi e dei relativi parametri è disponibile nel
Manuale delle liste, capitolo "Schemi logici", sezione "Blocchi funzione liberi" (schemi logici
7210 e segg.).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
249
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Attivazione dei blocchi liberi
Nell'impostazione di fabbrica non vengono usati i blocchi funzione liberi nel convertitore.
Procedura
Per attivare i blocchi liberi, procedere nel seguente modo:
1. Scegliere il blocco funzione tramite gli schemi logici della lista dei parametri; qui sono
elencati tutti i parametri necessari per interconnettere il blocco.
2. Assegnare il blocco a un gruppo di esecuzione.
3. Definire la sequenza di esecuzione all'interno del gruppo di esecuzione, necessario solo
se sono stati assegnati più blocchi dello stesso gruppo di esecuzione.
4. Interconnettere gli ingressi e le uscite del blocco con i corrispondenti segnali del
convertitore.
I blocchi liberi sono stati attivati.
I gruppi di esecuzione vengono calcolati in diversi intervalli di tempo. I blocchi funzione liberi
assegnabili ai vari intervalli di tempo sono indicati nella tabella seguente.
Tabella 8- 41 Gruppi di esecuzione e possibili assegnazioni dei blocchi funzione liberi
Gruppi di esecuzione 1 … 6 con i relativi intervalli di
tempo
Blocchi funzione liberi
1
2
3
4
5
6
8 ms
16 ms
32 ms
64 ms
128 ms
256 ms
Blocchi logici
AND, OR, XOR, NOT
✓
✓
✓
✓
✓
✓
Blocchi aritmetici
ADD, SUB, MUL, DIV, AVA, NCM, PLI
-
-
-
-
✓
✓
Blocchi temporali
MFP, PCL, PDE, PDF, PST
-
-
-
-
✓
✓
Memoria
RSR, DSR
✓
✓
✓
✓
✓
✓
Interruttore
NSW
-
-
-
-
✓
✓
Interruttore
BSW
✓
✓
✓
✓
✓
✓
Regolatore
LIM, PT1, INT, DIF
-
-
-
-
✓
✓
Monitoraggio del valore limite
LVM
-
-
-
-
✓
✓
✓: È possibile assegnare il blocco al gruppo di esecuzione
-: il blocco non può essere assegnato a questo gruppo di esecuzione
Convertitori con le Control Unit CU240B-2 e CU240E-2
250
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Normazione dei segnali analogici
Quando si interconnette una grandezza fisica, ad es. numero di giri o tensione, all'ingresso
di un blocco funzione libero, il segnale viene normalizzato automaticamente sul valore 1.
Anche i segnali di uscita analogici dei blocchi funzione liberi sono disponibili come
grandezze normalizzate (0 ≙ 0%, 1≙ 100%).
Non appena si interconnette il segnale di uscita normalizzato di un blocco funzione libero a
funzioni che richiedono grandezze di ingresso fisiche, il convertitore converte il segnale nella
grandezza fisica. Un esempio di questo caso è la sorgente del segnale del limite superiore
della coppia (p1522).
Seguono le grandezze elencate con i rispettivi parametri di normazione :
• Numeri di giri
p2000 N. giri di riferimento
(≙100 %)
• Valori di tensione
p2001 Tensione di riferimento
(≙100 %)
• Valori di corrente
p2002 Corrente di riferimento
(≙100 %)
• Valori di coppia
p2003 Coppia di riferimento
(≙100 %)
• Valori di potenza
p2004 Potenza di riferimento
(≙100 %)
• Angolo
p2005 Angolo di riferimento
(≙100 %)
• Accelerazione
p2007 Accelerazione di
riferimento
(≙100 %)
• Temperatura
100 °C ≙ 100%
Esempi di normazione
● Numero di giri:
Numero di giri di riferimento p2000 = 3000 1/min, numero di giri attuale 2100 1/min. Da
cui si ricava la grandezza di ingresso normalizzata: 2100 / 3000 = 0,7.
● Temperatura:
La grandezza di riferimento è 100 °C.In caso di temperatura effettiva di 120 °C, il valore
di ingresso risultante è 120 °C / 100 °C = 1,2.
Nota
Immettere i limiti all'interno dei blocchi funzione come valori normalizzati. Calcolo dei
valori normalizzati: Valore limite normalizzato = valore limite fisico / valore del parametro
di riferimento.
L'assegnazione al parametro di riferimento è disponibile nella lista dei parametri nelle
singole descrizioni dei parametri.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
251
Impostazione delle funzioni
8.7 Funzioni specifiche dell'applicazione
Esempio: Operazione logica di due ingressi digitali
Si vuole inserire il motore sia tramite l'ingresso digitale 0 sia tramite l'ingresso digitale 1.
Procedura
Per collegare con una combinazione logica due ingressi digitali, procedere nel seguente
modo:
1. Attivare un blocco libero OR, assegnandogli un gruppo di esecuzione, quindi specificare
la sequenza di esecuzione.
2. Interconnettere i segnali di stato dei due ingressi digitali DI 0 e DI 1 su entrambi gli
ingressi del blocco OR.
3. Interconnettere l'uscita del blocco OR sul comando ON interno (p0840).
Sono stati collegati due ingressi digitali con una combinazione logica.
Parametri
Descrizione
p20048 = 1
Assegnazione del bloccoOR 0 al gruppo di esecuzione 1(impostazione di
fabbrica: 9999)
Il blocco OR 0 viene calcolato negli intervalli di tempo con 8 ms
p20049 = 60
Definizione della sequenza di esecuzione all'interno del gruppo di esecuzione
1 (impostazione di fabbrica: 60)
All'interno di un gruppo di esecuzione viene dapprima calcolato il blocco con il
valore minimo.
p20046 [0] = 722.0
Interconnessione del primo ingresso OR 0 (impostazione di fabbrica: 0)
p20046 [1] = 722.1
Interconnessione del secondo ingresso OR 0 (impostazione di fabbrica: 0)
Il primo ingresso OR 0 è collegato con l'ingresso digitale 0 (r0722.0)
Il secondo ingresso OR 0 è collegato con l'ingresso digitale 1 (r0722.1)
p0840 = 20047
Interconnessione dell'uscita OR 0 (impostazione di fabbrica: 0)
L'uscita OR 0 (r20047) è collegata con il comando ON del motore
Esempio: Operazione logica AND
Per un esempio dettagliato di un'operazione logica AND con l'utilizzo di un blocco temporale,
vedere il capitolo Esempio (Pagina 374).
Ulteriori informazioni si trovano nei seguenti manuali:
● Manuale di guida alle funzioni "Descrizione dei blocchi standard DCC"
(http://support.automation.siemens.com/WW/view/it/29193002)
● Manuale di guida alle funzioni "Blocchi funzionali liberi"
(http://support.automation.siemens.com/WW/view/it/35125827)
Convertitori con le Control Unit CU240B-2 e CU240E-2
252
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
8.8
Funzione di sicurezza Safe Torque Off (STO)
In queste istruzioni operative viene descritta la messa in servizio della funzione di sicurezza
STO con il comando eseguito tramite un ingresso digitale fail-safe.
Una descrizione completa di tutte le funzioni di sicurezza e del comando tramite PROFIsafe
è riportata nel manuale di guida alle funzioni Safety Integrated, vedere la sezione Ulteriori
informazioni sul convertitore (Pagina 397).
8.8.1
Descrizione delle funzioni
Definizione secondo EN 61800-5-2:
"[…] [Il convertitore] non fornisce energia al
motore che è in grado di generare una coppia (o
una forza in caso di
motore lineare)."
Esempi pratici
Esempio
Possibilità di soluzione
All'azionamento del pulsante di arresto di
emergenza un motore fermo non deve accelerare
accidentalmente.
•
Cablare il pulsante di arresto di emergenza
con un ingresso fail-safe.
•
Selezionare STO tramite l'ingresso fail-safe.
Il pulsante di arresto di emergenza centrale
impedisce l'accelerazione involontaria di più
azionamenti.
•
Valutare il pulsante di arresto di emergenza
in un controllore centrale.
•
Selezionare STO tramite PROFIsafe.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
253
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
Come funziona STO in dettaglio?
Il convertitore riconosce
la selezione di STO
tramite un ingresso failsafe o tramite la
comunicazione sicura
PROFIsafe.
Dopodiché il
convertitore disinserisce
in modo sicuro la coppia
del motore collegato.
Se non è presente un freno di stazionamento motore, il motore si arresta per inerzia.
Se si utilizza un freno di stazionamento motore, il convertitore chiude il freno subito dopo la
selezione di STO.
8.8.2
Requisito per l'utilizzo di STO
Il presupposto per l'impiego della funzione di sicurezza STO è che il costruttore di macchina
abbia valutato il rischio della macchina o dell'impianto, ad es. in conformità con
EN ISO 1050, "Sicurezza del macchinario – Principi per la valutazione di rischio". La
valutazione di rischio deve dimostrare che l'utilizzo del convertitore è ammesso in base a
SIL 2 o a PL d.
8.8.3
Messa in servizio di STO
8.8.3.1
Tool di messa in servizio
Si consiglia di eseguire la messa in servizio delle funzioni di sicurezza con il tool per PC
STARTER .
Se per la messa in servizio si utilizza STARTER , impostare le funzioni tramite le maschere
grafiche e non lavorare con i parametri. In questo caso le tabelle dei parametri nelle sezioni
seguenti possono essere ignorate.
Tabella 8- 42 Tool di messa in servizio STARTER (software PC)
Download
N. di ordinazione
STARTER
6SL3255-0AA00-2CA0
(http://support.automation.siemens.com/WW/v Kit di collegamento al PC, contiene DVD di
iew/it/10804985/130000)
STARTER e cavo USB
Convertitori con le Control Unit CU240B-2 e CU240E-2
254
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
8.8.3.2
Protezione delle impostazioni da modifiche non autorizzate
Le funzioni di sicurezza sono protette con una password da modifiche non autorizzate.
Tabella 8- 43 Parametri
8.8.3.3
N.
Descrizione
p9761
Immissione password (impostazione di fabbrica: 0000 hex)
Le password ammesse sono comprese nell'intervallo 1 … FFFF FFFF.
p9762
Nuova password
p9763
Conferma password
Ripristino dei parametri delle funzioni di sicurezza alle impostazioni di fabbrica
Procedura
Per riportare i parametri delle funzioni di sicurezza alle impostazioni di fabbrica senza
modificare le impostazioni standard, procedere nel seguente modo:
1. Andare online con STARTER .
2. Aprire la maschera delle funzioni di sicurezza ①.
3. Selezionare il pulsante per ripristinare le impostazioni di fabbrica ②.
4. Immettere la password per le funzioni di sicurezza.
5. Confermare il salvataggio dei parametri (copia da RAM a ROM).
6. Andare offline con STARTER .
7. Disinserire la tensione di alimentazione del convertitore.
8. Attendere lo spegnimento di tutti i LED del convertitore. Riattivare la tensione di
alimentazione del convertitore (Power On Reset).
L'impostazione di fabbrica delle funzioni di sicurezza nel convertitore è stata ripristinata.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
255
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
Parametro
Descrizione
p0010
Filtro parametri per messa in servizio azionamento
p0970
8.8.3.4
0
Pronto
95
Messa in servizio Safety Integrated
Ripristino dei parametri dell'azionamento
0
Inattivo
5
Avvio del ripristino dei parametri Safety.
Dopo il ripristino il convertitore imposta p0970 = 0.
p9761
Immissione password (impostazione di fabbrica: 0000 hex)
Le password ammesse sono comprese nell'intervallo 1 … FFFF FFFF.
p9762
Nuova password
p9763
Conferma password
Modifica impostazioni
Procedura
Per iniziare la messa in servizio delle funzioni di sicurezza, procedere nel seguente modo:
1. Andare online con STARTER.
2. Selezionare le funzioni fail-safe in STARTER.
3. Selezionare "Modifica impostazioni".
Parametri
Descrizione
p0010 = 95
Filtro parametri per messa in servizio azionamento
Messa in servizio Safety Integrated
p9761
Immissione password (impostazione di fabbrica: 0000 hex)
Le password ammesse sono comprese nell'intervallo 1 … FFFF FFFF.
p9762
Nuova password
p9763
Conferma password
Convertitori con le Control Unit CU240B-2 e CU240E-2
256
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
4. Selezionare "STO tramite morsetto":
Sono state eseguite le seguenti operazioni della messa in servizio:
● La messa in servizio delle funzioni di sicurezza è conclusa.
● Sono state selezionate le funzioni di base tramite i morsetti onboard del convertitore.
Tabella 8- 44 Parametri
Parametri
Descrizione
p9601
Abilitazione funzioni integrate nell'azionamento (impostazione di fabbrica: 0000 bin)
p9601 = 0
Blocco funzioni di sicurezza integrate nell'azionamento
p9601 = 1
Abilitazione funzioni di base mediante morsetti onboard
Le altre possibilità di selezione sono descritte in "Manuale di guida alle funzioni Safety
Integrated". Vedere anche la sezione: Ulteriori informazioni sul convertitore (Pagina 397).
8.8.3.5
Interconnessione del segnale "STO attivo"
Se è necessaria la risposta "STO attivo" del convertitore nel controllore sovraordinato,
occorre interconnettere il segnale in modo corrispondente.
Procedura
Per interconnettere la risposta "STO attivo", procedere nel modo seguente:
1. Selezionare il pulsante per il segnale di risposta.
2. Nel menu di scelta seguente selezionare l'impostazione adatta all'applicazione.
È stata interconnessa la risposta "STO attivo". Il convertitore segnala "STO attivo" al
controllore sovraordinato dopo la selezione di STO.
Parametri
Descrizione
r9773.01
Segnale 1: STO attivo nell'azionamento
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
257
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
8.8.3.6
Impostazione del filtro per ingressi fail-safe
Procedura
Per impostare il filtro di ingresso e la sorveglianza del sincronismo dell'ingresso fail-safe,
procedere nel modo seguente:
1. Selezionare le impostazioni avanzate di STO.
2. Impostare il tempo di antirimbalzo per il filtro di ingresso F-DI.
3. Impostare la discrepanza per la sorveglianza del sincronismo.
4. Chiudere la maschera.
Sono stati impostati il filtro di ingresso e la sorveglianza del sincronismo dell'ingresso failsafe.
Descrizione del filtro dei segnali
Per il condizionamento dei segnali delle uscite fail-safe è disponibile quanto segue:
● Un tempo di tolleranza per la sorveglianza del sincronismo.
● Un filtro per la soppressione di segnali di breve durata, ad es. impulsi di test.
Tempo di tolleranza per la sorveglianza del sincronismo
Il convertitore verifica se su entrambi gli ingressi i segnali assumono sempre lo stesso stato
(high o low).
Nei sensori elettromeccanici, ad es. pulsanti di arresto di emergenza o interruttori delle
porte, i contatti del sensore non commutano mai simultaneamente e quindi sono per breve
tempo incoerenti (discrepanza). Una discrepanza prolungata è indice di un errore di
interconnessione di un ingresso fail-safe, ad es. la rottura di un conduttore.
Il convertitore tollera discrepanze di breve durata con l'impostazione corrispondente.
Il tempo di tolleranza non prolunga il tempo di reazione del convertitore. Il convertitore
seleziona la funzione di sicurezza non appena uno dei due segnali F-DI cambia il suo stato
da high a low.
Convertitori con le Control Unit CU240B-2 e CU240E-2
258
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
Figura 8-35
Confronto tra tolleranza e discrepanza
Filtro per la soppressione di segnali di breve durata
Normalmente il convertitore reagisce subito alle variazioni del segnale degli ingressi failsafe. Questo comportamento è indesiderato nei seguenti casi:
● Se si collega un ingresso fail-safe del convertitore con un sensore elettromeccanico, il
rimbalzo dei contatti può causare variazioni del segnale alle quali il convertitore reagisce.
● Alcuni controller testano le loro uscite fail-safe con "test a pattern di bit" (test
acceso/spento) per poter riconoscere un errore di cortocircuito o cortocircuito trasversale.
Se si collega un ingresso fail-safe del convertitore a un'uscita fail-safe di un controller, il
convertitore reagirà a questi segnali di test.
Una variazione del segnale all'interno di un test a pattern di bit dura generalmente:
– Test acceso: 1 ms
– Test spento: 4 ms
Se l'ingresso fail-safe rileva troppe variazioni del segnale in un determinato lasso di tempo, il
convertitore reagirà riportando un'anomalia.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
259
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
Figura 8-36
Reazione del convertitore ad un test a pattern di bit
Un filtro di segnale impostabile nel convertitore elimina le brevi variazioni del segnale
causate da test a pattern di bit o rimbalzo dei contatti.
Il filtro prolunga il tempo di reazione del convertitore. Il convertitore seleziona la funzione di
sicurezza solo dopo che è trascorso il tempo di antirimbalzo.
Figura 8-37
Filtro per la soppressione di brevi variazioni del segnale
Parametri
Descrizione
p9650
Tempo di tolleranza per la commutazione F-DI (impostazione di fabbrica: 500 ms)
Tempo di tolleranza per la commutazione dell'ingresso digitale fail-safe per le funzioni
di base.
p9651
Tempo di antirimbalzo STO (impostazione di fabbrica: 1 ms)
Tempo di antirimbalzo dell'ingresso digitale fail-safe per le funzioni di base.
Tempi di antirimbalzo per funzioni standard e funzioni di sicurezza
Il tempo di antirimbalzo p0724 per ingressi digitali "standard" non influisce in alcun modo sui
segnali degli ingressi fail-safe. Lo stesso vale per l'inverso: il tempo di antirimbalzo F-DI non
influisce sui segnali degli ingressi "standard".
Convertitori con le Control Unit CU240B-2 e CU240E-2
260
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
Quando si utilizza un ingresso come ingresso standard, impostare il tempo di antirimbalzo
tramite il parametro p0724 .
Quando si utilizza un ingresso come ingresso fail-safe, impostare il tempo di antirimbalzo
come descritto sopra.
8.8.3.7
Impostazione della dinamizzazione forzata
Procedura
Per impostare la dinamizzazione forzata delle funzioni di base, procedere nel modo
seguente:
1. Selezionare le impostazioni avanzate di STO.
2. Impostare il tempo di sorveglianza a un valore adeguato per l'applicazione.
3. Con questo segnale il convertitore informa che è necessaria una dinamizzazione forzata.
Interconnettere questo segnale, ad es. con un'uscita digitale a scelta.
È stata impostata la dinamizzazione forzata delle funzioni di base.
Descrizione della dinamizzazione forzata
Per garantire la conformità ai requisiti previsti dalle norme ISO 13849-1 e IEC 61508 in
materia di rilevamento tempestivo degli errori, è necessario verificare il corretto
funzionamento dei circuiti di commutazione di sicurezza del convertitore a intervalli regolari
(almeno una volta all'anno).
Dinamizzazione forzata delle funzioni di base
La dinamizzazione forzata delle funzioni di base è l'autotest regolarmente eseguito dal
convertitore nel quale vengono verificati i circuiti di commutazione per la disinserzione della
coppia. Se si utilizza Safe Brake Relay, durante la dinamizzazione forzata il convertitore
verifica anche i circuiti di commutazione di questo modulo opzionale.
Il convertitore esegue una dinamizzazione forzata nelle seguenti condizioni:
● Ogni volta che si collega la tensione di alimentazione.
● Ogni volta che viene selezionata la funzione STO.
Il convertitore sorveglia la dinamizzazione forzata a intervalli regolari.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
261
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
Figura 8-38
Avvio e sorveglianza della dinamizzazione forzata
Parametri
Descrizione
p9659
Timer dinamizzazione forzata (impostazione di fabbrica: 8 h)
Tempo di sorveglianza per la dinamizzazione forzata.
r9660
Tempo residuo dinamizzazione forzata
Indicazione del tempo residuo prima dell'esecuzione della dinamizzazione e test dei
circuiti di disinserzione Safety.
r9773.31
Segnale 1: dinamizzazione forzata richiesta
Segnale per il controllore sovraordinato.
Tempistica della dinamizzazione forzata
Con l'avviso A01699 è necessario avviare la dinamizzazione forzata alla successiva
occasione. Questi avvisi non pregiudicano il funzionamento della macchina.
● Disinserire il motore.
● Selezionare la funzione STO o disinserire temporaneamente la tensione di alimentazione
del convertitore e quindi reinserirla.
Esempi di tempistiche di dinamizzazione forzata:
● Con gli azionamenti in stato di arresto dopo l'attivazione dell'impianto.
● All'apertura della porta di protezione.
● A intervalli di tempo prefissati (ad es. a cadenza di 8 ore).
● Nel funzionamento automatico, in funzione del tempo e dell'evento.
Convertitori con le Control Unit CU240B-2 e CU240E-2
262
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
8.8.3.8
Attiva impostazioni
Attiva impostazioni
Procedura
Per attivare le impopstazioni delle funzioni di sicurezza, procedere nel seguente modo:
1. Selezionare il pulsante "Copia parametri" per creare una copia ridondante delle
impostazioni nel convertitore.
2. Selezionare il pulsante "Attiva impostazioni".
3. Se la password è quella impostata in fabbrica viene richiesto di modificarla.
Se si imposta una password non consentita, viene mantenuta la password precedente.
4. Confermare la richiesta di salvataggio delle impostazioni definite (copia da RAM a ROM).
5. Disinserire la tensione di alimentazione del convertitore.
6. Attendere lo spegnimento di tutti i LED del convertitore.
7. Reinserire la tensione di alimentazione del convertitore.
Le impostazioni sono ora attive.
Parametri
Descrizione
p9700 = 57 hex
Funzione di copia SI (impostazione di fabbrica: 0)
Avviare il parametro Funzione di copia SI.
p9701 = AC hex
Conferma di modifica dati (impostazione di fabbrica: 0)Confermare la modifica
dei dati nel complesso.
p0010 = 0
Filtro parametri per messa in servizio azionamento
0: Pronto
p9761
Immissione password (impostazione di fabbrica: 0000 hex)
Le password ammesse sono comprese nell'intervallo 1 … FFFF FFFF.
p9762
Nuova password
p9763
Conferma password
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
263
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
8.8.3.9
Controllo dell'assegnazione degli ingressi digitali
Controllo dell'assegnazione degli ingressi digitali
Se si comandano le funzioni di sicurezza nel convertitore tramite ingressi digitali, occorre
verificare se questi ingressi digitali sono impostati con altre funzioni.
Figura 8-39
Esempio: Assegnazione di STO agli ingressi digitali DI 4 e DI 5
L'assegnazione agli ingressi digitali di una funzione di sicurezza e al contempo di una
funzione "standard" può causare un comportamento imprevisto dell'azionamento.
Procedura
Per controllare l'assegnazione degli ingressi digitali, procedere nel seguente modo:
1. In STARTER selezionare la maschera per i morsetti degli ingressi digitali.
2. Rimuovere tutte le interconnessioni dei segnali degli ingressi digitali che si utilizzano
come ingresso fail-safe F-DI:
Figura 8-40
Rimozione della preimpostazione degli ingressi digitali DI 4 e DI 5
3. Se si utilizza la commutazione del set di dati CDS, è necessario cancellare
l'assegnazione di più funzioni agli ingressi digitali per tutti i CDS.
Si è garantito che gli ingressi fail-safe delle funzioni di sicurezza non comandano altre
funzioni nel convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
264
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
8.8.3.10
Collaudo - Conclusione della messa in servizio
Perché è necessario un collaudo?
La direttiva macchine CE e la norma ISO 13849-1 richiedono quanto segue:
● Dopo la messa in servizio è necessario controllare le funzioni della macchina rilevanti per
la sicurezza e dei componenti della macchina.
→ Test di collaudo.
● Occorre redigere un "certificato di collaudo" dal quale emergano i risultati della prova.
→ Documentazione.
Test di collaudo
Il test di collaudo si articola in due parti:
● Verifica che le funzioni di sicurezza siano impostate correttamente nel convertitore:
– La regolazione del numero di giri è in grado di gestire i casi applicativi progettati nella
macchina?
– Le impostazioni di interfacce, tempi e sorveglianze sono adatte alla progettazione
della macchina?
● Verifica che le funzioni rilevanti ai fini della sicurezza si attivino correttamente nella
macchina o nell'impianto.
Questa parte del test di collaudo va oltre il test di collaudo del convertitore:
– Tutti i dispositivi di sicurezza, come ad es. sorveglianze delle porte di protezione,
barriere ottiche, interruttori di emergenza e finecorsa, sono collegati e pronti al
funzionamento?
– Il controllore sovraordinato reagisce correttamente alle risposte rilevanti ai fini della
sicurezza da parte del convertitore?
– Le impostazioni del convertitore sono compatibili con la funzione rilevante ai fini della
sicurezza progettata nella macchina?
Documentazione
La documentazione è composta dalle parti seguenti:
● Descrizione dei componenti e delle funzioni rilevanti per la sicurezza della macchina o
dell'impianto.
● Registrazione dei risultati del test di collaudo.
● Registrazione delle impostazioni delle funzioni di sicurezza.
● Controfirma della documentazione.
Persone autorizzate
Per persone autorizzate si intendono persone scelte dal costruttore della macchina che per
la loro formazione tecnica e la conoscenza delle funzioni di sicurezza sono in grado di
eseguire il collaudo in modo adeguato.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
265
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
Collaudo ridotto
Un collaudo completo è necessario solo dopo la prima messa in servizio. Se si ampliano le
funzioni di sicurezza è sufficiente un collaudo ridotto.
● Il collaudo ridotto è necessario solo in caso di sostituzione, update o ampliamento
funzionale delle parte modificate della macchina.
● Il test di collaudo è richiesto unicamente per le funzioni di sicurezza che vengono
utilizzate.
Tabella 8- 45 Collaudo ridotto con ampliamento delle funzioni
Misure
Sostituzione della Control Unit.
Collaudo
Test di collaudo
Documentazione
No.
•
Verificare solo il senso di
rotazione del motore.
Integrazione dei dati del convertitore
•
Registrazione di nuove checksum
•
Controfirma
Sostituzione del Power Module.
Integrazione della versione dell'hardware nei
dati del convertitore
Sostituzione del motore.
Nessuna modifica.
Sostituzione del riduttore.
Sostituzione di una periferica rilevante per No.
la sicurezza (ad es. interruttore di arresto Verificare solo il comando
di emergenza).
delle funzioni di sicurezza
che sono influenzate dai
componenti sostituiti.
Nessuna modifica.
Update del firmware del convertitore.
•
Integrazione della versione del firmware nei
dati del convertitore
•
Registrazione di nuove checksum
•
Controfirma.
•
Integrazione della panoramica della
macchina
Ampliamento delle funzioni della
macchina (azionamento aggiuntivo).
Trasmissione delle impostazioni del
convertitore ad altre macchine identiche
tramite la messa in servizio di serie.
No.
Sì.
Verificare solo le funzioni di
sicurezza del nuovo
azionamento.
No.
•
Integrazione dei dati del convertitore
•
Integrazione della tabella delle funzioni
•
Integrazione dei valori limite
•
Registrazione di nuove checksum
•
Controfirma
•
Verificare solo il comando di
tutte le funzioni di
•
sicurezza.
•
Integrazione della descrizione della
macchina
Controllo delle checksum
Controllo delle versioni del firmware
Convertitori con le Control Unit CU240B-2 e CU240E-2
266
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
Documenti per il collaudo
STARTER mette a disposizione una serie di documenti che contengono le raccomandazioni
relative al collaudo delle funzioni di sicurezza.
Procedura
Procedere nel modo seguente per creare con STARTER la documentazione di collaudo
dell'azionamento:
1. In STARTER selezionare "Crea documentazione di collaudo":
STARTER contiene i seguenti modelli in lingua tedesca e inglese.
2. Scegliere il modello adatto e creare un registro per ogni azionamento della propria
macchina o impianto:
– Modello per la documentazione di macchina:
de_G120x_Dokumentation_Maschine: modello tedesco.
en_G120x_Documentation_machine: modello inglese.
– Protocollo delle impostazioni per le funzioni di base a partire dalla versione firmware
V4.4
de_G120x_Basicc_V4.4…: protocollo tedesco.
en_G120x_Basic_V4.4…: protocollo inglese.
3. Caricare i protocolli creati per l'archiviazione e la documentazione della macchina per la
successiva elaborazione:
4. Archiviare i protocolli e la documentazione della macchina.
I documenti per il collaudo delle funzioni di sicurezza sono stati creati.
I protocolli e la documentazione della macchina sono anche disponibili nella sezione:
Documentazione per il collaudo delle funzioni di sicurezza (Pagina 394).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
267
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
Test di collaudo consigliato
Le descrizioni seguenti relative al test di collaudo sono raccomandazioni che chiariscono il
principio del collaudo. È consentito discostarsi da queste raccomandazioni, a patto che al
termine della messa in servizio si verifichino i seguenti punti:
● Assegnazione corretta delle interfacce di ogni convertitore con funzione di sicurezza:
– Ingressi fail-safe
– Indirizzi PROFIsafe
● Impostazione corretta della funzione di sicurezza STO.
Nota
Eseguire un test di collaudo con la massima velocità e accelerazione possibile per
verificare i percorsi e i tempi di frenatura massimi previsti.
Nota
Avvisi non critici
Gli avvisi seguenti si presentano dopo ogni avvio del sistema e non sono critici per il
collaudo:
• A01697
• A01796
Figura 8-41
Test di collaudo per STO (funzioni di base)
Convertitori con le Control Unit CU240B-2 e CU240E-2
268
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.8 Funzione di sicurezza Safe Torque Off (STO)
Procedura
Per eseguire il test di collaudo della funzione STO nell'ambito delle funzioni di base,
procedere nel modo seguente:
Stato
1.
2.
3.
Il convertitore è pronto per il funzionamento.
•
Il convertitore non segnala anomalie o avvisi relativi alle funzioni di sicurezza
(r0945[0…7], r2122[0…7]).
•
STO non è attivo (r9773.1 = 0).
Accendere il motore
2.1.
Impostare un valore di riferimento del numero di giri ≠ 0.
2.2.
Inserire il motore (comando ON).
2.3.
Verificare che giri il motore previsto.
Selezionare STO
3.1.
Selezionare STO mentre il motore sta girando
Testare ogni comando configurato, ad es. tramite gli ingressi digitali e
PROFIsafe.
3.2.
Verificare quanto segue:
per il comando tramite PROFIsafe
4.
per comando tramite morsetto
•
Il convertitore segnala:
"Selezione STO tramite
PROFIsafe" (r9772.20 = 1).
•
Se non è presente un freno meccanico, il motore si arresta gradualmente.
Un freno meccanico frena il motore e lo mantiene nello stato di fermo.
•
Il convertitore non segnala anomalie o avvisi relativi alle funzioni di
sicurezza (r0945[0…7], r2122[0…7]).
•
Il convertitore segnala:
"STO selezionata" (r9773.0 = 1).
"STO è attivo" (r9773.1 = 1).
•
Il convertitore segnala:
"Selezione STO tramite morsetto"
(r9772.17 = 1).
Deselezionare STO
4.1.
Deselezionare STO.
4.2.
Verificare quanto segue:
•
STO non è attivo (r9773.1 = 0).
•
Il convertitore non segnala anomalie o avvisi relativi alle funzioni di
sicurezza (r0945[0…7], r2122[0…7]).
Il test di collaudo della funzione STO è stato eseguito.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
269
Impostazione delle funzioni
8.9 Commutazione tra impostazioni diverse
8.9
Commutazione tra impostazioni diverse
Per alcune applicazioni sono necessarie diverse impostazioni del convertitore.
Esempio:
Si utilizzano più motori su un solo convertitore. A seconda del motore utilizzato, il
convertitore deve funzionare con i dati motore corretti e con il generatore di rampa adeguato.
Set di dati dell'azionamento (Drive Data Set, DDS)
È possibile impostare in modo diverso alcune funzioni del convertitore e commutare tra le
varie impostazioni.
I relativi parametri sono indicizzati (indice 0, 1, 2 o 3). I comandi di controllo consentono di
selezionare uno dei quattro indici, quindi una delle quattro impostazioni memorizzate.
Le impostazioni nel convertitore che hanno lo stesso indice sono definite set di dati
dell'azionamento.
Figura 8-42
Commutazione tra impostazioni diverse con set di dati dell'azionamento (DDS)
Il parametro p0180 consente di specificare il numero dei set di dati di azionamento (1 … 4).
Tabella 8- 46 Selezione del numero di set di dati azionamento
Parametri
Descrizione
p0010 = 15
Messa in serviz. azion.: Set di dati
p0180
Numero di set di dati dell'azionamento (impostazione di fabbrica: 1)
p0010 = 0
Messa in serviz. azion.: Pronto
Convertitori con le Control Unit CU240B-2 e CU240E-2
270
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Impostazione delle funzioni
8.9 Commutazione tra impostazioni diverse
Tabella 8- 47 Parametri per la commutazione dei set di dati dell'azionamento:
Parametri
Descrizione
p0820
Selezione set di dati dell'azionamento DDS bit 0
p0821
Selezione set di dati dell'azionamento DDS bit 1
p0826
Commutazione motore, numero motore
Ad ogni set di dati dell'azionamento è assegnato un numero motore:
p0826[0] = numero motore per il set di dati dell'azionamento 0.
…
p0826[3] = numero motore per il set di dati dell'azionamento 3.
Se si utilizzano set di dati dell'azionamento diversi con lo stesso motore, in ogni
indice del parametro p0826 si deve immettere lo stesso numero motore. In questo
caso si possono commutare i set di dati dell'azionamento anche durante il
funzionamento.
Se si utilizzano motori diversi su un convertitore, occorre numerare i motori nel
parametro p0826. In questo caso è possibile commutare i set di dati dell'azionamento
solo nello stato "Pronto al funzionamento" con il motore disinserito. Il tempo di
commutazione è di circa 50 ms.
r0051
Visualizzazione del numero del set di dati azionamento attivo attuale
Per una panoramica dei parametri che fanno parte dei set di dati dell'azionamento e che
possono essere commutati, vedere il Manuale delle liste.
Tabella 8- 48 Parametri per la copia dei set di dati di azionamento
Parametri
Descrizione
p0819[0]
Set dati azionamento sorgente
p0819[1]
Set dati azionamento destinazione
p0819[2] = 1
Avvio processo di copia
Ulteriori informazioni sono disponibili nella lista dei parametri e nello schema logico 8565 del
Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
271
Impostazione delle funzioni
8.9 Commutazione tra impostazioni diverse
Convertitori con le Control Unit CU240B-2 e CU240E-2
272
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9
Salvataggio esterno dei dati
Dopo la messa in servizio le impostazioni sono memorizzate nel convertitore in modo
protetto contro le interruzioni di rete.
Si consiglia inoltre di salvare le impostazioni dei parametri su un supporto di
memorizzazione esterno al convertitore. In caso di guasto del convertitore, questo
accorgimento evita la perdita delle impostazioni definite (vedere anche Sostituzione della
Control Unit con funzione di sicurezza abilitata (Pagina 296)).
Sono disponibili i seguenti supporti per la memorizzazione delle impostazioni definite:
● Scheda di memoria
● PC/PG
● Operator Panel
ATTENZIONE
Backup dei dati tramite Operator Panel in caso di collegamento USB con il PG/PC non
possibile
Se il convertitore è collegato a un PG/PC tramite un cavo USB, non è possibile salvare i
dati sulla MMC tramite l'Operator Panel.
Per poter salvare i dati sulla MMC tramite un Operator Panel, è necessario rimuovere il
collegamento USB tra il PG/PC e il convertitore.
Esecuzione della messa in servizio di serie
Una messa in servizio di serie è la messa in servizio di più azionamenti identici.
Procedura
Per eseguire una messa in servizio di serie, procedere nel seguente modo:
1. Mettere in servizio il primo convertitore.
2. Salvare le impostazioni del primo convertitore su un supporto di memorizzazione esterno.
3. Trasferire le impostazioni del primo convertitore a un secondo convertitore tramite il
supporto di memorizzazione.
Nota
La Control Unit su cui vengono trasferite le impostazioni deve avere lo stesso numero di
ordinazione e la stessa versione o una versione successiva del firmware della Control
Unit sorgente.
La messa in servizio di serie è stata eseguita.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
273
Salvataggio dei dati e messa in servizio di serie
9.1 Salvataggio e trasferimento delle impostazioni con la scheda di memoria
9.1
memoria
Salvataggio e trasferimento delle impostazioni con la scheda di
Quali schede di memoria si consigliano?
Si consiglia di utilizzare una delle schede di memoria con i seguenti numeri di ordinazione:
● MMC (numero di ordinazione 6SL3254-0AM00-0AA0)
● SD (numero di ordinazione 6ES7954-8LB01-0AA0)
Utilizzo di schede di memoria di altri costruttori
Se si desidera utilizzare una diversa scheda di memoria SD o MMC, occorre formattarla nel
seguente modo:
● MMC: Formato FAT 16
– Inserire la scheda in un apposito lettore del PC.
– Comando per la formattazione:
format x: /fs:fat (x: identificativo di unità della scheda di memoria sul PC)
● SD: Formato FAT 32
– Inserire la scheda in un apposito lettore del PC.
– Comando per la formattazione:
format x: /fs:fat32 (x: identificativo di unità della scheda di memoria sul PC).
Nota
Funzionalità limitate con schede di memoria di altri costruttori
Le schede di memoria di altri costruttori non supportano sempre tutte le funzioni (ad
es. il download). L'impiego di schede di memoria di questo tipo avviene a proprio
rischio.
Convertitori con le Control Unit CU240B-2 e CU240E-2
274
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9.1 Salvataggio e trasferimento delle impostazioni con la scheda di memoria
9.1.1
Salvataggio delle impostazioni sulla scheda di memoria
Si consiglia di inserire la scheda di memoria prima di accendere il convertitore. Il convertitore
salva le impostazioni sempre su una scheda inserita.
Per salvare le impostazioni del convertitore su una scheda di memoria esistono due
possibilità:
Salvataggio automatico
Presupposto
L'alimentazione di tensione del convertitore è disinserita.
Procedura
Per salvare automaticamente le impostazioni, procedere nel seguente modo:
1. Inserire una scheda di
memoria vuota nel
convertitore.
2. In seguito inserire
l'alimentazione di tensione
del convertitore.
Dopo l'attivazione il convertitore copia le proprie impostazioni sulla scheda di memoria.
Nota
Se la scheda di memoria non è vuota, il convertitore acquisisce i dati contenuti al suo
interno. In questo modo si cancellano le impostazioni già presenti nel convertitore.
Per il salvataggio automatico dei dati utilizzare solo schede di memoria vuote.
Salvataggio manuale
Presupposto
• L'alimentazione di tensione del convertitore è inserita.
• Inserire una scheda di memoria nel convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
275
Salvataggio dei dati e messa in servizio di serie
9.1 Salvataggio e trasferimento delle impostazioni con la scheda di memoria
Procedura con STARTER
Per salvare automaticamente le impostazioni su una scheda di memoria, procedere nel
seguente modo:
1. Passare online con STARTER e selezionare nell'azionamento "Drive Navigator".
2. Selezionare il pulsante "Messa in servizio".
3. Selezionare il pulsante per il trasferimento delle impostazioni alla scheda di memoria.
4. Selezionare le impostazioni come illustrato nella figura e avviare il salvataggio dei dati.
5. Chiudere le maschere.
Le impostazioni della scheda di memoria sono state salvate manualmente.
Procedura con il BOP-2
Per salvare automaticamente le impostazioni su una scheda di memoria, procedere nel
seguente modo:
1. Inserire un BOP-2 nel convertitore.
2. Selezionare il menu "EXTRAS".
3. Selezionare nel menu "EXTRAS" - "TO CRD".
Le impostazioni sono state salvate manualmente nella scheda di memoria.
Convertitori con le Control Unit CU240B-2 e CU240E-2
276
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9.1 Salvataggio e trasferimento delle impostazioni con la scheda di memoria
9.1.2
Trasferimento dell'impostazione dalla scheda di memoria
Trasferimento automatico
Presupposto
L'alimentazione di tensione del convertitore è disinserita.
Procedura
Per trasferire automaticamente le impostazioni, procedere nel seguente modo:
1. Inserire la scheda di
memoria nel convertitore.
2. In seguito inserire
l'alimentazione di tensione
del convertitore.
Se la scheda di memoria contiene parametri validi, il convertitore acquisisce i dati contenuti
al suo interno.
Trasferimento manuale
Presupposto
• L'alimentazione di tensione del convertitore è inserita.
• Inserire una scheda di memoria nel convertitore.
Procedura con STARTER
Per trasferire manualmente le impostazioni da una scheda di memoria, procedere nel
seguente modo:
1. Passare online con STARTER e selezionare nell'azionamento "Drive Navigator".
2. Selezionare il pulsante "Messa in servizio".
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
277
Salvataggio dei dati e messa in servizio di serie
9.1 Salvataggio e trasferimento delle impostazioni con la scheda di memoria
3. Selezionare il pulsante per il trasferimento dei dati dalla scheda di memoria al
convertitore.
4. Selezionare le impostazioni come illustrato nella figura e avviare il salvataggio dei dati.
5. Chiudere le maschere.
6. Andare offline con STARTER.
7. Disinserire la tensione di alimentazione del convertitore.
8. Attendere lo spegnimento di tutti i LED del convertitore. Inserire di nuovo la tensione di
alimentazione del convertitore. Le impostazioni diventano attive solo dopo questo Power
On Reset.
Le impostazioni sono state trasferite manualmente dalla scheda di memoria.
Convertitori con le Control Unit CU240B-2 e CU240E-2
278
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9.1 Salvataggio e trasferimento delle impostazioni con la scheda di memoria
Procedura con il BOP-2
Per trasferire manualmente le impostazioni da una scheda di memoria, procedere nel
seguente modo:
1.
2.
3.
4.
Inserire un BOP-2 nel convertitore.
Selezionare il menu "EXTRAS".
Avviare la trasmissione dati nel menu "EXTRAS" - "FROM CRD".
Disinserire la tensione di alimentazione del convertitore.
5. Attendere lo spegnimento di tutti i LED del convertitore.
6. Inserire di nuovo la tensione di alimentazione del convertitore. Le
impostazioni diventano attive solo dopo questo Power On Reset.
Le impostazioni sono state trasferite manualmente dalla scheda di memoria.
9.1.3
Rimozione sicura scheda di memoria
ATTENZIONE
Distruzione dei dati della scheda di memoria in caso di rimozione della scheda
Se si rimuove la scheda di memoria con il convertitore inserito senza eseguire la funzione
"Rimozione sicura", è possibile che il file system della scheda di memoria vada distrutto. In
questo caso la scheda di memoria diventa inutilizzabile.
Rimuovere la scheda di memoria solo mediante la funzione "Rimozione sicura".
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
279
Salvataggio dei dati e messa in servizio di serie
9.1 Salvataggio e trasferimento delle impostazioni con la scheda di memoria
Procedura con STARTER
Per rimuovere la scheda di memoria in modo sicuro, procedere nel modo seguente:
1. Selezionare in Drive Navigator le seguenti maschere:
2. Fare clic sul pulsante per una rimozione sicura della scheda di memoria.
3. Dopo la visualizzazione del messaggio corrispondente è possibile rimuovere la scheda di
memoria dal convertitore.
La scheda di memoria è stata rimossa in modo sicuro.
Convertitori con le Control Unit CU240B-2 e CU240E-2
280
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9.1 Salvataggio e trasferimento delle impostazioni con la scheda di memoria
Procedura con il BOP-2
Per rimuovere la scheda di memoria in modo sicuro, procedere nel modo seguente:
1. Andare al parametro p9400. Se la scheda di memoria è inserita
correttamente, p9400 = 1.
2. Impostare p9400 = 2. Il BOP-2 mostra per qualche secondo il
messaggio "BUSY" e quindi p9400 = 3 o p9400 = 100.
3. Bei p9400 = 3 la scheda di memoria può essere rimossa.
4. Con p9400 = 100 non è possibile al momento rimuovere la scheda
di memoria.
Riprovare nuovamente impostando p9400 = 2.
La scheda di memoria è stata rimossa in modo sicuro.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
281
Salvataggio dei dati e messa in servizio di serie
9.2 Salvataggio e trasferimento delle impostazioni con STARTER
9.2
Salvataggio e trasferimento delle impostazioni con STARTER
Presupposto
Con la tensione di alimentazione
inserita è possibile trasferire le
impostazioni del convertitore in un PG
o in un PC o viceversa acquisire i dati
del PG/PC nel convertitore.
Il presupposto è che il tool di messa in
servizio STARTER sia stato installato
sul PG/PC utilizzato.
Per maggiori informazioni su STARTER vedere la sezione: Utensili per la messa in servizio
del convertitore (Pagina 35).
Convertitore → PC/PG
Procedura
Per salvare le impostazioni, procedere nel seguente modo:
1. Andare online con STARTER :
.
.
2. Selezionare il pulsante "Carica progetto nel PG":
3. Per salvare i dati nel PG selezionare il pulsante:
4. Andare offline con STARTER :
.
.
Le impostazioni sono state salvate.
Procedura PC/PG → convertitore
La procedura dipende dal fatto che vengano trasferite o meno anche le impostazioni delle
funzioni di sicurezza.
Convertitore senza funzioni di sicurezza:
● Andare online con STARTER :
.
● Selezionare il pulsante "Carica progetto nel sistema di destinazione":
.
● Per salvare i dati nel convertitore fare clic sul pulsante "Copia da RAM a ROM":
● Andare offline con STARTER :
.
.
Convertitori con le Control Unit CU240B-2 e CU240E-2
282
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9.2 Salvataggio e trasferimento delle impostazioni con STARTER
Convertitore con funzioni di sicurezza:
● ① Andare online con STARTER :
.
● ② Selezionare il pulsante "Carica progetto nel sistema di destinazione":
.
● ③ Richiamare la maschera STARTER per le funzioni di sicurezza.
● ① Copiare i parametri delle funzioni di sicurezza.
● ② Attivare le impostazioni.
● Per salvare i dati nel convertitore fare clic sul pulsante "Copia da RAM a ROM":
● Andare offline con STARTER :
.
.
● Disinserire la tensione di alimentazione del convertitore.
● Attendere lo spegnimento di tutti i LED del convertitore. Inserire di nuovo la tensione di
alimentazione del convertitore. Le impostazioni diventano attive solo dopo questo Power
On Reset.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
283
Salvataggio dei dati e messa in servizio di serie
9.3 Salvataggio e trasferimento delle impostazioni con un Operator Panel
9.3
Panel
Salvataggio e trasferimento delle impostazioni con un Operator
Presupposto
Con la tensione di alimentazione inserita è possibile
trasferire le impostazioni del convertitore in BOP-2 o
viceversa acquisire i dati da BOP-2 al convertitore.
Convertitore → BOP-2
Procedura
Per salvare le impostazioni, procedere nel seguente modo:
Avviare la trasmissione dati nel menu "EXTRAS" - "TO BOP".
Le impostazioni sono state salvate.
BOP-2 → Convertitore
Procedura
Per trasferire le impostazioni, procedere nel seguente modo:
1. Avviare la trasmissione dati nel menu "EXTRAS" - "FROM BOP".
2. Disinserire la tensione di alimentazione del convertitore.
3. Attendere lo spegnimento di tutti i LED del convertitore. Inserire di
nuovo la tensione di alimentazione del convertitore. Le impostazioni
diventano attive solo dopo questo Power On Reset.
Le impostazioni sono state trasferite.
Convertitori con le Control Unit CU240B-2 e CU240E-2
284
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9.4 Altre possibilità di salvataggio delle impostazioni
9.4
Altre possibilità di salvataggio delle impostazioni
Descrizione
Oltre all'impostazione standard, la memoria interna del convertitore dispone di tre altre
impostazioni per la sicurezza.
Sulla scheda di memoria è possibile salvare altre 99 impostazioni oltre a quella standard del
convertitore.
Ulteriori informazioni sono disponibili in Internet: Possibilità di salvataggio
(http://support.automation.siemens.com/WW/view/en/43512514).
Tabella 9- 1
Salvataggio delle impostazioni nel convertitore
Parametri
Descrizione
p0970
Ripristino dei parametri dell'azionamento
Caricare l'impostazione salvata (numero 10, 11 o 12). Caricando un'impostazione si
sovrascrive l'impostazione attuale.
p0971
Salvataggio parametri
Salvare l'impostazione (10, 11 o 12).
Tabella 9- 2
Salvataggio delle impostazioni aggiuntive sulla scheda di memoria
Parametri
Descrizione
p0802
Trasferimento dei dati, scheda di memoria come sorgente/destinazione (impostazione
di fabbrica: 0)
Impostazione standard: p802 = 0
Altre impostazioni: p802 = 1 … 99
p0803
Trasferimento dei dati, memoria dell'apparecchio come sorgente/destinazione
(impostazione di fabbrica: 0)
Impostazione standard: p803 = 0
Altre impostazioni: p803 = 10, 11 o 12
Tabella 9- 3
Comando sul BOP-2
Descrizione
Il convertitore scrive l'impostazione 0, 10, 11 o 12 sulla
scheda di memoria in base a p0802. Il file sulla scheda di
memoria riceve il numero in base a p0802.
Il convertitore carica l'impostazione con il numero
corrispondente a p0802 della scheda di memoria e
sovrascrive in questo modo l'impostazione 0, 10, 11 o 12.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
285
Salvataggio dei dati e messa in servizio di serie
9.5 Protezione in scrittura e protezione know-how
9.5
Protezione in scrittura e protezione know-how
Il convertitore offre la possibilità di proteggere le impostazioni di progettazione definite da
modifiche o copie.
Per farlo sono disponibili i metodi di protezione in scrittura e protezione del know-how.
Protezione in scrittura - Panoramica
La protezione in scrittura serve anzitutto ad impedire che le impostazioni del convertitore
vengano modificate inavvertitamente. Per la protezione in scrittura non è necessaria una
password; le impostazioni non sono codificate.
Sono escluse dalla protezione in scrittura le seguenti funzioni:
● Attivazione/disattivazione della protezione in scrittura (p7761)
● Modifica del livello di accesso (p0003)
● Salvataggio parametri (p0971)
● Rimozione sicura della scheda di memoria (p9400)
● Accesso ai parametri Service (p3950) - solo per il personale dell'assistenza, tramite
immissione di una password
● Ripristino delle impostazioni di fabbrica
● Upload
● Conferma di segnalazioni e anomalie
● Commutazione al pannello di comando
● Trace
● Generatore di funzioni
● Funzioni di misura
● Lettura del buffer di diagnostica
I singoli parametri esclusi dalla protezione in scrittura sono riportati nel Manuale delle liste, al
capitolo "Parametri per la protezione in scrittura e la protezione know-how".
Protezione know-how - Panoramica
La protezione know-how consente, ad es., al costruttore di una macchina di codificare il suo
know-how di progettazione e di proteggerlo in tal modo dal rischio di modifiche o
riproduzioni.
La protezione know-how è disponibile nelle seguenti varianti:
● Protezione know-how senza protezione contro la copia (possibile con o senza scheda di
memoria)
● Protezione know-how con protezione contro la copia (possibile solo con scheda di
memoria Siemens)
Per la protezione know-how è richiesta l'immissione di una password.
Con la protezione know-how attiva le finestre di dialogo di STARTER sono bloccate. Nella
Lista esperti di STARTER è possibile visualizzare solo i parametri di supervisione.
Convertitori con le Control Unit CU240B-2 e CU240E-2
286
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9.5 Protezione in scrittura e protezione know-how
Azioni possibili anche con la protezione know-how attiva
● Ripristino delle impostazioni di fabbrica
● Conferma delle segnalazioni
● Visualizzazione dei messaggi
● Visualizzazione della cronologia allarmi
● Lettura del buffer di diagnostica
● Commutazione al pannello di comando (funzionalità completa del pannello di comando:
assunzione della priorità di comando, tutti i pulsanti e i parametri di impostazione)
● Upload (solo parametri accessibili nonostante la protezione know-how)
Azioni non possibili con la protezione know-how attiva
● Download
● Esportazione/importazione
● Trace
● Generatore di funzioni
● Funzioni di misura
● Impostazione automatica del regolatore
● Misura da fermo/rotante
● Cancellazione della cronologia allarmi
I singoli parametri esclusi dalla protezione know-how sono riportati nel Manuale delle liste, al
capitolo "Parametri per la protezione in scrittura e la protezione know-how".
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
287
Salvataggio dei dati e messa in servizio di serie
9.5 Protezione in scrittura e protezione know-how
9.5.1
Protezione in scrittura
Impostazione della protezione in scrittura
Presupposto
Per poter impostare la protezione in scrittura è necessario che il convertitore sia collegato
online con STARTER.
Attivazione e disattivazione della protezione in scrittura
Procedura
Per attivare o disattivare la protezione in scrittura, procedere nel seguente modo:
1. Selezionare il convertitore nel progetto
STARTER premendo il tasto sinistro
del mouse.
2. Aprire con il tasto destro del mouse il
menu contestuale.
3. Attivare la protezione in scrittura.
La procedura di disattivazione è
analoga.
Perché l'impostazione sia definita in
modo permanente è necessario
selezionare "Copia da RAM a ROM"
. Diversamente le impostazioni definite
andrebbero perse con lo spegnimento
del convertitore.
È stata attivata o disattivata la protezione in scrittura.
Particolarità nel ripristino alle impostazioni di fabbrica
Se con la protezione in scrittura attiva si seleziona "Ripristino delle impostazioni di fabbrica"
con il pulsante
, viene visualizzata la seguente richiesta di conferma.
Convertitori con le Control Unit CU240B-2 e CU240E-2
288
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9.5 Protezione in scrittura e protezione know-how
La richiesta di conferma non compare se si seleziona un percorso diverso per il ripristino
delle impostazioni di fabbrica, ad es. tramite la Lista esperti.
Nota
Particolarità con CAN, BACnet e MODBUS
In questi sistemi di bus i parametri nell'impostazione di fabbrica sono modificabili nonostante
la protezione in scrittura attiva. Perché la protezione in scrittura sia efficace anche
nell'accesso tramite questi bus di campo, è necessario impostare inoltre p7762 = 1.
Questa impostazione è possibile tramite la Lista esperti.
9.5.2
Protezione know-how
Nel funzionamento del convertitore con protezione know-how rispettare le seguenti
avvertenze
Nota
Supporto da parte dell'assistenza tecnica in caso di protezione know-how attiva
Se la protezione know-how è attiva, il supporto da parte dell'assistenza tecnica è possibile
solo previo consenso del costruttore della macchina.
La protezione know-how può essere attivata solo online
Dopo aver creato un progetto offline sul proprio computer, occorre caricarlo nel convertitore
e andare online. Solo successivamente è possibile attivare la protezione know-how.
Non si può attivare la protezione know-how nel progetto presente sul computer.
Protezione know-how con protezione contro la copia solo con scheda di memoria Siemens
Per la den "Protezione know-how con protezione contro la copia" deve essere inserita una
scheda di memoria Siemens.
Se si tenta di attivare la "Protezione know-how con protezione contro la copia" senza scheda
di memoria o con un'altra scheda di memoria, compare il messaggio "Impossibile attivare la
protezione know-how per l'apparecchio di azionamento".
Verifica della password per la protezione know-how e le impostazioni della lingua di
Windows
Tenere presente che una modifica delle impostazioni della lingua di Windows dopo
l'attivazione della protezione know-how può causare anomalie durante la successiva verifica
della password. Pertanto, si consiglia di utilizzare per la password esclusivamente caratteri
ASCII.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
289
Salvataggio dei dati e messa in servizio di serie
9.5 Protezione in scrittura e protezione know-how
Messa in servizio del convertitore con protezione know-how
Procedura
Per mettere in servizio il convertitore con protezione know-how, procedere nel seguente
modo:
1. Mettere in servizio il convertitore
2. Creare la Lista eccezioni (Pagina 292)
3. Attivare la Protezione know-how (Pagina 290)
4. Salvare le impostazioni nel convertitore copiandole dalla RAM alla ROM con
o tramite
p0971 = 1.
5. Salvare il progetto sul PC/PG con
. Eventualmente salvare altri dati riferiti al progetto
(tipo di macchina, password, ecc.) che sono necessari per il supporto del cliente finale.
È stato messo in servizio il convertitore con la protezione know-how.
9.5.2.1
Impostazioni per la protezione know-how
Attivazione della protezione know-how
Procedura
Per attivare la protezione know-how, procedere nel seguente modo:
1. Selezionare il convertitore nel progetto STARTER e "Protezione know-how apparecchio
di azionamento/Attivazione …" nel menu contestuale (vedere anche Protezione in
scrittura (Pagina 288)).
2. Immettere la password e confermare con OK.
La password deve comprendere almeno un carattere e non può superare i 30 caratteri.
Sono consentiti tutti i caratteri.
3. In questa maschera è selezionato in modo predefinito "Copia da RAM a ROM". In questo
modo si è certi che le impostazioni vengano salvate in modo permanente.
Se l'opzione "Copia da RAM a ROM" non è selezionata, le impostazioni di protezione
know-how vengono salvate solo nella memoria volatile e alla successiva inserzione non
saranno più disponibili.
Convertitori con le Control Unit CU240B-2 e CU240E-2
290
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9.5 Protezione in scrittura e protezione know-how
La protezione know-how è stata attivata.
Salvataggio delle impostazioni sulla scheda di memoria
Con la protezione know-how attiva è possibile salvare le impostazioni sulla scheda di
memoria tramite p0971.
A tale scopo impostare p0971 = 1. I dati vengono scritti codificati sulla scheda di memoria.
Dopo il salvataggio p0971 viene reimpostata a 0.
Disattivazione della protezione know-how, cancellazione della password
Procedura
Per disattivare la protezione know-how, procedere nel seguente modo:
1. Selezionare il convertitore nel
progetto STARTER e aprire la
finestra di dialogo "Protezione
know-how apparecchio di
azionamento/Disattivazione …"
premendo il tasto destro del mouse.
2. Selezionare in questa finestra
l'opzione desiderata.
3. Immettere la password e chiudere
la maschera con OK.
La protezione know-how è stata disattivata.
Nota
Disattivazione definitiva o temporanea della protezione know-how
Disattivare temporaneamente la protezione know-how significa che dopo la disinserzione e
l'inserzione la protezione know-how torna attiva. Una disattivazione definitiva significa invece
che dopo la disinserzione e l'inserzione la protezione know-how non è più attiva.
Disattivazione temporanea della protezione know-how
Disattivare temporaneamente la protezione know-how significa che è possibile modificare le
impostazioni nel convertitore fino alla sua disinserzione e reinserzione, oppure finché non
viene riattivata la protezione know-how.
Disattivazione definitiva della protezione know-how (cancellazione della password)
Disattivare definitivamente la protezione know-how significa cancellare la password,
● immediatamente e definitivamente, se si seleziona "Copia da RAM a ROM"
● fino al successivo comando ON/OFF, se non si seleziona "Copia da RAM a ROM"
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
291
Salvataggio dei dati e messa in servizio di serie
9.5 Protezione in scrittura e protezione know-how
Modifica password
Selezionare il convertitore nel progetto STARTER e tramite il menu contestuale aprire la
finestra di dialogo "Protezione know-how apparecchio di azionamento/Modifica password
…".
9.5.2.2
Creazione di una lista eccezioni per la protezione know-how
Tramite la lista eccezioni è possibile rendere accessibili singoli parametri di impostazione al
cliente finale come costruttore della macchina, nonostante la protezione know-how. La lista
eccezioni viene definita tramite i parametri p7763 e p7764 nella Lista esperti. In p7763 si
definisce il numero di parametri per la lista di selezione. In p7764 si assegnano ai singoli
indici i numeri di parametro della lista di selezione.
Procedura
Per modificare il numero di parametri per la lista di selezione, procedere nel seguente modo:
1. Salvare le impostazioni del convertitore tramite un upload (
offline (
) sul PC/PG e passare
)
2. Nel progetto sul PC, impostare p7763 al valore desiderato.
3. Salvare il progetto.
4. Andare online e caricare il progetto nel convertitore (
)
5. Eseguire ora le altre impostazioni in p7764.
Il numero di parametri per la lista di selezione è stato modificato.
Impostazione di fabbrica per la lista eccezioni:
● p7763 = 1 (la lista di selezione contiene un solo parametro)
● p7764[0] = 7766 (numero parametro per l'immissione della password)
Nota
Blocco dell'accesso al convertitore a causa di lista eccezioni incompleta
Se si rimuove p7766 dalla lista eccezioni non è più possibile immettere una password e
di conseguenza disattivare la protezione know-how.
In questo caso, per poter nuovamente accedere al convertitore occorre ripristinarne le
impostazioni di fabbrica.
Convertitori con le Control Unit CU240B-2 e CU240E-2
292
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Salvataggio dei dati e messa in servizio di serie
9.5 Protezione in scrittura e protezione know-how
9.5.2.3
Sostituzione di apparecchi con protezione know-how attiva
Sostituzione di apparecchi con protezione know-how senza protezione contro la copia
Con la protezione know-how senza protezione contro la copia è possibile trasferire le
impostazioni del convertitore a un altro convertitore tramite una scheda di memoria.
Vedere anche:
● Salvataggio delle impostazioni sulla scheda di memoria (Pagina 275)
● Trasferimento dell'impostazione dalla scheda di memoria (Pagina 277)
Sostituzione di apparecchi con protezione know-how e protezione contro la copia associata
La protezione know-how con protezione contro la copia impedisce che le impostazioni del
convertitore vengano copiate e trasferite. Questa funzione viene usata in primo luogo dai
costruttori delle macchine.
Se è attiva la protezione know-how con protezione contro la copia, non è possibile sostituire
il convertitore come descritto in "Sostituzione della Control Unit con funzione di sicurezza
abilitata (Pagina 296)".
Per consentire comunque la sostituzione, occorre utilizzare una scheda di memoria Siemens
e il costruttore della macchina deve possedere una macchina prototipo identica.
Per la sostituzione di apparecchi esistono due possibilità:
Possibilità 1: il costruttore della macchina conosce solo il numero di serie del nuovo
convertitore
● Il cliente finale fornisce le seguenti informazioni al costruttore della macchina:
– per quale macchina deve essere sostituito il convertitore?
– qual è il numero di serie (r7758) del nuovo convertitore?
● Il costruttore della macchina va online sul prototipo
– disattiva la protezione know-how, vedere Impostazioni per la protezione know-how
(Pagina 290)
– immette il numero di serie del nuovo convertitore in p7759
– immette in p7769 il numero di serie della scheda di memoria inserita come numero di
serie di riferimento
– attiva la protezione know-how con protezione contro la copia ("Copia da RAM a ROM"
deve essere attivato), vedere Impostazioni per la protezione know-how (Pagina 290)
– registra la progettazione sulla scheda di memoria con p0971 = 1
– invia la scheda di memoria al cliente finale
● Il cliente finale inserisce la scheda di memoria e accende il convertitore.
Durante la fase di avvio il convertitore verifica i numeri di serie di scheda e convertitore e, se
questi corrispondono, passa allo stato "Pronto all'inserzione".
Se i numeri non corrispondono, il convertitore segnala l'anomalia F13100 (nessuna scheda
di memoria valida).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
293
Salvataggio dei dati e messa in servizio di serie
9.5 Protezione in scrittura e protezione know-how
Possibilità 2: il costruttore della macchina conosce il numero di serie del nuovo convertitore
e il numero di serie dell'MMC
● Il cliente finale fornisce le seguenti informazioni al costruttore della macchina:
– per quale macchina deve essere sostituito il convertitore?
– qual è il numero di serie (r7758) del nuovo convertitore?
– qual è il numero di serie della scheda di memoria?
● Il costruttore della macchina va online sul prototipo
– disattiva la protezione know-how, vedere Impostazioni per la protezione know-how
(Pagina 290)
– immette il numero di serie del nuovo convertitore in p7759
– immette in p7769 il numero di serie della scheda di memoria del cliente inserita come
numero di serie di riferimento
– attiva la protezione know-how con protezione contro la copia ("Copia da RAM a ROM"
deve essere attivato), vedere Impostazioni per la protezione know-how (Pagina 290)
– registra la progettazione sulla scheda di memoria con p0971 = 1
– copia il progetto codificato dalla scheda al PC
– lo invia al cliente finale, ad es. tramite e-mail
● Il cliente finale copia il progetto sulla scheda di memoria Siemens appartenente alla
macchina, inserisce la scheda nel convertitore e accende il convertitore.
Durante la fase di avvio il convertitore verifica i numeri di serie di scheda e convertitore e, se
questi corrispondono, passa allo stato "Pronto all'inserzione".
Se i numeri non corrispondono, il convertitore segnala l'anomalia F13100 (nessuna scheda
di memoria valida).
Convertitori con le Control Unit CU240B-2 e CU240E-2
294
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
10
Riparazione
10.1
Panoramica sulla sostituzione dei componenti del convertitore
Componenti sostituibili
In presenza di continue interferenze occorre sostituire il Power Module o la Control Unit. Il
Power Module e la Control Unit del convertitore possono essere sostituiti indipendentemente
l'uno dall'altro.
Sostituzione del Power Module
Sostituzione della Control Unit
Componente
sostitutivo:
Componente sostitutivo:
•
stesso tipo
•
stessa potenza
Componente sostitutivo:
Componente sostitutivo:
•
stesso tipo
•
stesso tipo
•
stesso tipo
•
maggiore potenza
•
stessa versione firmware
•
versione firmware
Power Module e il motore devono
essere adeguati l'uno all'altro
(rapporto tra potenza nominale del
motore e Power Module > 1/8)
superiore
(ad es. sostituzione di
FW V4.2 con FW V4.3)
Dopo aver sostituito la Control Unit occorre ripristinare le
impostazioni del convertitore.
AVVERTENZA
Lesioni fisiche o danni materiali dovuti a un comportamento imprevisto del convertitore
L'installazione di convertitori di tipo diverso in caso di sostituzione può causare un
comportamento imprevisto dell'azionamento.
• In tutti i casi non ammessi secondo la tabella precedente, occorre eseguire una nuova
messa in servizio dell'azionamento dopo aver sostituito un convertitore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
295
Riparazione
10.2 Sostituzione della Control Unit con funzione di sicurezza abilitata
Sostituzione di apparecchi senza supporto rimovibile – solo in caso di comunicazione tramite
PROFINET
Se nel controllore l'utente ha creato una topologia, grazie al codice di contiguità è possibile
identificare un convertitore guasto e sostituirlo con un nuovo dispositivo dello stesso tipo e
della stessa versione software. in questo caso non è necessario eseguire una nuova messa
in servizio.
Le impostazioni del convertitore possono essere caricate nel convertitore tramite la scheda
di memoria oppure, se si utilizza un controllore SIMATIC S7 con DriveES, tramite DriveES.
Per maggiori informazioni sulla sostituzione di apparecchi senza supporto rimovibile vedere
il manuale Profinet - Descrizione del sistema
(http://support.automation.siemens.com/WW/view/it/19292127).
10.2
Sostituzione della Control Unit con funzione di sicurezza abilitata
Sostituzione della Control Unit con salvataggio dati sulla scheda di memoria
Procedura
Per sostituire la Control Unit, procedere nel seguente modo:
1. Disinserire la tensione di rete del Power Module e, qualora presente, l'alimentazione
esterna a 24 V o la tensione per le uscite digitali della Control Unit.
2. Scollegare i cavi di segnale della Control Unit.
3. Disinstallare la Control Unit difettosa.
4. Montare la nuova Control Unit nel Power Module. La nuova Control Unit deve avere lo
stesso numero di ordinazione e la stessa versione del firmware (o una versione
successiva) della Control Unit sostituita.
5. Rimuovere la scheda di memoria dalla vecchia Control Unit e inserirla nella nuova
Control Unit.
6. Ricollegare i cavi di segnale della Control Unit.
7. Reinserire la tensione di rete.
8. Il convertitore carica le impostazioni dalla scheda di memoria.
9. Verificare se dopo il caricamento il convertitore emette l'avviso A01028.
– Avviso A01028:
Le impostazioni caricate non sono compatibili con il convertitore.
Annullare l'avviso con p0971 = 1 e rimettere in servizio il convertitore.
– Nessun avviso A01028:
Eseguire un test di collaudo ridotto.
La prova di collaudo ridotta è descritta nella sezione Collaudo ridotto (Pagina 266).
La Control Unit è stata sostituita e le impostazioni delle funzioni di sicurezza sono state
copiate dalla scheda di memoria alla nuova Control Unit.
Convertitori con le Control Unit CU240B-2 e CU240E-2
296
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Riparazione
10.2 Sostituzione della Control Unit con funzione di sicurezza abilitata
Sostituzione della Control Unit con salvataggio dati nel PC
Procedura
Per sostituire la Control Unit, procedere nel seguente modo:
1. Disinserire la tensione di rete del Power Module e, qualora presente, l'alimentazione
esterna a 24 V o la tensione per le uscite digitali della Control Unit.
2. Scollegare i cavi di segnale della Control Unit.
3. Disinstallare la Control Unit difettosa.
4. Montare la nuova Control Unit nel Power Module.
5. Ricollegare i cavi di segnale della Control Unit.
6. Reinserire la tensione di rete.
7. Aprire il progetto necessario per l'azionamento in STARTER.
8. Passare online e trasferire le impostazioni dal PC al convertitore con il pulsante
.
Dopo il download il convertitore segnala delle anomalie. Ignorare queste anomalie, dato
che vengono confermate automaticamente con le operazioni seguenti.
9. In STARTER selezionare la maschera delle funzioni di sicurezza.
10.Selezionare il pulsante "Modifica impostazioni".
11.Selezionare il pulsante "Attiva impostazioni".
12.Salvare le impostazioni (Copia da RAM a ROM ).
13.Disinserire la tensione di alimentazione del convertitore.
14.Attendere lo spegnimento di tutti i LED del convertitore.
15.Riattivare la tensione di alimentazione del convertitore (Power On Reset).
16.Eseguire un test di collaudo ridotto, vedere la sezione Collaudo ridotto (Pagina 266).
La Control Unit è stata sostituita e le impostazioni delle funzioni di sicurezza sono state
copiate dal PC alla nuova Control Unit.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
297
Riparazione
10.2 Sostituzione della Control Unit con funzione di sicurezza abilitata
Sostituzione della Control Unit con backup dei dati nell'Operator Panel (BOP-2 o IOP)
Procedura
Per sostituire la Control Unit, procedere nel seguente modo:
1. Disinserire la tensione di rete del Power Module e, qualora presente, l'alimentazione
esterna a 24 V o la tensione per le uscite digitali della Control Unit.
2. Scollegare i cavi di segnale della Control Unit.
3. Disinstallare la Control Unit difettosa.
4. Montare la nuova Control Unit nel Power Module.
5. Ricollegare i cavi di segnale della Control Unit.
6. Reinserire la tensione di rete.
7. Collegare l'Operator Panel alla Control Unit.
8. Copiare le impostazioni dall'Operator Panel al convertitore, ad es. per il BOP-2 dal menu
"EXTRAS" - "FROM BOP".
9. Attendere fino alla conclusione della copia.
10.Verificare se dopo il caricamento il convertitore emette l'avviso A01028.
– Avviso A01028:
Le impostazioni caricate non sono compatibili con il convertitore.
Annullare l'avviso con p0971 = 1 e rimettere in servizio il convertitore.
– Nessun avviso A01028: Passare all'operazione successiva.
11.Disinserire la tensione di alimentazione del convertitore.
12.Attendere lo spegnimento di tutti i LED del convertitore.
13.Riattivare la tensione di alimentazione del convertitore (Power On Reset).
Il convertitore segnala le anomalie F1650, F1680 e F30680. Ignorare queste anomalie,
dato che vengono confermate automaticamente con le operazioni seguenti.
14.Impostare p0015 = 95.
15.Impostare p9761 alla password Safety.
16.Impostare p9701 = AC hex.
17.Impostare p0010 = 0.
18.Salvare le impostazioni in modo protetto contro le interruzioni di rete, ad es. per BOP-2
dal menu "EXTRAS" - "RAM-ROM".
19.Disinserire la tensione di alimentazione del convertitore.
20.Attendere lo spegnimento di tutti i LED del convertitore.
21.Riattivare la tensione di alimentazione del convertitore (Power On Reset).
22.Eseguire un test di collaudo ridotto, vedere la sezione Collaudo ridotto (Pagina 266).
La Control Unit è stata sostituita e le impostazioni delle funzioni di sicurezza sono state
copiate dall'Operator Panel alla nuova Control Unit.
Convertitori con le Control Unit CU240B-2 e CU240E-2
298
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Riparazione
10.3 Sostituzione della Control Unit senza funzioni di sicurezza abilitate
10.3
Sostituzione della Control Unit senza funzioni di sicurezza abilitate
Sostituzione della Control Unit con salvataggio dati sulla scheda di memoria
Procedura
Per sostituire la Control Unit, procedere nel seguente modo:
1. Disinserire la tensione di rete del Power Module e, qualora presente, l'alimentazione
esterna a 24 V o la tensione per le uscite digitali della Control Unit.
2. Scollegare i cavi di segnale della Control Unit.
3. Disinstallare la Control Unit difettosa.
4. Montare la nuova Control Unit nel Power Module. La nuova Control Unit deve avere lo
stesso numero di ordinazione e la stessa versione del firmware (o una versione
successiva) della Control Unit sostituita.
5. Rimuovere la scheda di memoria dalla vecchia Control Unit e inserirla nella nuova
Control Unit.
6. Ricollegare i cavi di segnale della Control Unit.
7. Reinserire la tensione di rete.
8. Il convertitore carica le impostazioni dalla scheda di memoria.
9. Verificare se dopo il caricamento il convertitore emette l'avviso A01028.
– Avviso A01028:
Le impostazioni caricate non sono compatibili con il convertitore.
Annullare l'avviso con p0971 = 1 e rimettere in servizio il convertitore.
– Nessun avviso A01028:
Il convertitore accetta le impostazioni caricate.
La Control Unit è stata sostituita con successo.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
299
Riparazione
10.4 Sostituzione della Control Unit senza salvataggio dei dati
Sostituzione della Control Unit con salvataggio dati nel PC
Procedura
Per sostituire la Control Unit, procedere nel seguente modo:
1. Disinserire la tensione di rete del Power Module e, qualora presente, l'alimentazione
esterna a 24 V o la tensione per le uscite digitali della Control Unit.
2. Scollegare i cavi di segnale della Control Unit.
3. Disinstallare la Control Unit difettosa.
4. Montare la nuova Control Unit nel Power Module.
5. Ricollegare i cavi di segnale della Control Unit.
6. Reinserire la tensione di rete.
7. Aprire il progetto necessario per l'azionamento in STARTER.
8. Passare online e trasferire le impostazioni dal PC al convertitore con il pulsante
.
Dopo il download il convertitore segnala delle anomalie. Ignorare queste anomalie, dato
che vengono confermate automaticamente con le operazioni seguenti.
9. Salvare le impostazioni (Copia da RAM a ROM ).
La Control Unit è stata sostituita con successo.
10.4
Sostituzione della Control Unit senza salvataggio dei dati
Se non si salvano le impostazioni, dopo aver sostituito la Control Unit è necessario eseguire
una nuova messa in servizio dell'azionamento.
Procedura
Per sostituire la Control Unit senza aver salvato le impostazioni, procedere nel seguente
modo:
1. Disinserire la tensione di rete del Power Module e, qualora presente, l'alimentazione
esterna a 24 V o la tensione per le uscite digitali della Control Unit.
2. Scollegare i cavi di segnale della Control Unit.
3. Disinstallare la Control Unit difettosa.
4. Montare la nuova Control Unit nel Power Module.
5. Ricollegare i cavi di segnale della Control Unit.
6. Reinserire la tensione di rete.
7. Mettere nuovamente in servizio l'azionamento.
Al termine della messa in servizio, la sostituzione della Control Unit è conclusa.
Convertitori con le Control Unit CU240B-2 e CU240E-2
300
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Riparazione
10.5 Sostituzione del Power Module con funzione di sicurezza abilitata
10.5
Sostituzione del Power Module con funzione di sicurezza abilitata
Procedura
Per sostituire il Power Module, procedere nel seguente modo:
1. Disinserire l'alimentazione di rete del Power Module.
L'alimentazione esterna 24 V della Control Unit eventualmente presente non deve essere
disinserita.
PERICOLO
Pericolo di folgorazione al contatto con i collegamenti del convertitore
Dopo aver disinserito l'alimentazione, occorrono 5 minuti perché i condensatori del
convertitore si scarichino e la tensione residua non costituisca un pericolo.
• Verificare la tensione sui collegamenti del convertitore prima di procedere ai lavori di
installazione.
2. Rimuovere i cavi di collegamento del Power Module.
3. Rimuovere la Control Unit dal Power Module.
4. Sostituire il vecchio Power Module con quello nuovo.
5. Montare la Control Unit sul nuovo Power Module.
6. Allacciare i cavi di collegamento del nuovo Power Module.
ATTENZIONE
Danni materiali dovuti allo scambio dei cavi di collegamento del motore
Se si scambiano due fasi del cavo motore si inverte il senso di rotazione del motore.
• Collegare le tre fasi dei cavi motore nella sequenza corretta.
• Dopo aver sostituito il Power Module, controllare il senso di rotazione del motore.
7. Disinserire la tensione di rete ed eventualmente l'alimentazione a 24 V della Control Unit.
8. Eseguire un test di collaudo ridotto, vedere la sezione Collaudo ridotto (Pagina 266).
Il Power Module è stato sostituito correttamente.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
301
Riparazione
10.6 Sostituzione del Power Module senza funzione di sicurezza abilitata
10.6
Sostituzione del Power Module senza funzione di sicurezza abilitata
Procedura
Per sostituire il Power Module, procedere nel seguente modo:
1. Disinserire l'alimentazione di rete dal Power Module.
L'alimentazione esterna a 24 V della Control Unit, se presente, non deve essere
disinserita.
PERICOLO
Pericolo di folgorazione al contatto con i collegamenti del convertitore
Dopo aver disinserito l'alimentazione, occorrono 5 minuti perché i condensatori del
convertitore si scarichino e la tensione residua non costituisca un pericolo.
Verificare la tensione sui collegamenti del convertitore prima di rimuovere i cavi di
collegamento.
2. Rimuovere i cavi di collegamento del Power Module.
3. Rimuovere la Control Unit dal Power Module.
4. Sostituire il vecchio Power Module con quello nuovo.
5. Montare la Control Unit sul nuovo Power Module.
6. Allacciare i cavi di collegamento del nuovo Power Module.
ATTENZIONE
Danni materiali dovuti allo scambio dei cavi di collegamento del motore
Se si scambiano due fasi del cavo motore si inverte il senso di rotazione del motore.
Collegare le tre fasi dei cavi motore nella sequenza corretta.
Dopo aver sostituito il Power Module, controllare il senso di rotazione del motore.
7. Disinserire la tensione di rete ed eventualmente l'alimentazione a 24 V della Control Unit.
Il Power Module è stato sostituito correttamente.
Convertitori con le Control Unit CU240B-2 e CU240E-2
302
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Riparazione
10.7 Upgrade del firmware
10.7
Upgrade del firmware
Effettuando un upgrade del firmware si sostituisce il firmware del convertitore con una nuova
versione firmware. Aggiornare il firmware a una nuova versione solo se occorre l'intera
gamma di funzioni della nuova versione.
Presupposto
● La versione firmware del convertitore è almeno V4.5.
● Si dispone della scheda di memoria con il firmware adatto per il convertitore.
Procedura
Per aggiornare il firmware del convertitore a una nuova versione, procedere nel seguente
modo:
1. Disinserire la tensione di alimentazione del convertitore.
2. Attendere lo spegnimento di tutti i LED del convertitore.
3. Inserire la scheda con il firmware corretto nello slot del convertitore e farla scattare in
posizione.
4. Inserire la tensione di alimentazione del convertitore.
5. Il convertitore trasferisce il firmware dalla scheda di memoria alla propria memoria.
Il trasferimento dura approssimativamente 5 - 10 minuti.
Durante il trasferimento, il LED RDY del convertitore si accende di luce rossa. Il LED BF
lampeggia di luce arancione con frequenza variabile.
6. Al termine del trasferimento, i LED RDY e BF lampeggiano lentamente di luce rossa
(0,5 Hz).
Nota
Danni del firmware dovuti alla caduta della tensione di alimentazione durante il
trasferimento
Una caduta di tensione durante il trasferimento può provocare danni del firmware del
convertitore.
• Non disinserire la tensione di alimentazione del convertitore finché il trasferimento non
è terminato.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
303
Riparazione
10.7 Upgrade del firmware
7. Rimuovere la scheda con il firmware dal convertitore.
8. Disinserire la tensione di alimentazione del convertitore.
9. Attendere lo spegnimento di tutti i LED del convertitore.
10.Inserire la tensione di alimentazione del convertitore.
11.Se l'upgrade del firmware si è svolto correttamente, dopo alcuni secondi il LED RDY del
convertitore si accende di luce verde.
Il firmware del convertitore è stato aggiornato a una nuova versione. Durante un upgrade, le
impostazioni dell'utente nel convertitore vengono mantenute.
Convertitori con le Control Unit CU240B-2 e CU240E-2
304
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Riparazione
10.8 Downgrade del firmware
10.8
Downgrade del firmware
Effettuando un downgrade del firmware si sostituisce il firmware del convertitore con una
versione firmware precedente. Aggiornare il firmware a una versione precedente solo se
dopo la sostituzione di un convertitore è necessario lo stesso firmware in tutti i convertitori.
Presupposto
● La versione firmware del convertitore è almeno V4.6.
● Si dispone della scheda di memoria con il firmware adatto per il convertitore.
● Le impostazioni sono state salvate su una scheda di memoria, in un Operator Panel o nel
PC.
Procedura
Per aggiornare il firmware del convertitore a una versione precedente, procedere nel
seguente modo:
1. Disinserire la tensione di alimentazione del convertitore.
2. Attendere lo spegnimento di tutti i LED del convertitore.
3. Inserire la scheda con il firmware corretto nello slot del convertitore e farla scattare in
posizione.
4. Inserire la tensione di alimentazione del convertitore.
5. Il convertitore trasferisce il firmware dalla scheda di memoria alla propria memoria.
Il trasferimento dura approssimativamente 5 - 10 minuti.
Durante il trasferimento, il LED RDY del convertitore si accende di luce rossa. Il LED BF
lampeggia di luce arancione con frequenza variabile.
6. Al termine del trasferimento, i LED RDY e BF lampeggiano lentamente di luce rossa
(0,5 Hz).
Nota
Danni del firmware dovuti alla caduta della tensione di alimentazione durante il
trasferimento
Una caduta di tensione durante il trasferimento può provocare danni del firmware del
convertitore.
• Non disinserire la tensione di alimentazione del convertitore finché il trasferimento non
è terminato.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
305
Riparazione
10.8 Downgrade del firmware
7. Rimuovere la scheda con il firmware dal convertitore.
8. Disinserire la tensione di alimentazione del convertitore.
9. Attendere lo spegnimento di tutti i LED del convertitore.
10.Inserire la tensione di alimentazione del convertitore.
11.Se il downgrade del firmware si è svolto correttamente, dopo alcuni secondi il LED RDY
del convertitore si accende di luce verde.
Dopo il downgrade del firmware, nel convertitore vengono ripristinate le impostazioni di
fabbrica.
12.Applicare nel convertitore le impostazioni salvate.
Vedere anche la sezione: Salvataggio dei dati e messa in servizio di serie (Pagina 273).
Il firmware del convertitore è stato aggiornato a una versione precedente e nel convertitore
sono state applicate le impostazioni salvate.
Convertitori con le Control Unit CU240B-2 e CU240E-2
306
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Riparazione
10.9 Correzione di un upgrade o un downgrade del firmware non riuscito
10.9
Correzione di un upgrade o un downgrade del firmware non riuscito
Come segnala il convertitore un upgrade o un downgrade non riuscito?
Il convertitore segnala un upgrade o un downgrade del
firmware non riuscito tramite il lampeggio rapido del LED
RDY e l'accensione del LED BF.
Correzione di un upgrade o un downgrade non riuscito
Per correggere un upgrade o un downgrade del firmware non riuscito, verificare i seguenti
punti:
● La versione firmware del convertitore soddisfa i requisiti?
– Per un upgrade la versione minima deve essere V4.5.
– Per un downgrade la versione minima deve essere V4.6.
● La scheda è stata inserita correttamente?
● La scheda contiene il firmware corretto?
● Ripetere la procedura adeguata.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
307
Riparazione
10.10 Se il convertitore non ha alcuna reazione
10.10
Se il convertitore non ha alcuna reazione
Se il convertitore non ha alcuna reazione
Se si carica un file danneggiato dalla scheda di memoria, è possibile che il convertitore non
reagisca più ai comandi provenienti dall'Operator Panel o dal controllore sovraordinato. In
questo caso occorre ripristinare le impostazioni di fabbrica del convertitore ed eseguire una
nuova messa in servizio. Questo stato del convertitore può manifestarsi in due modi:
Caso 1
● Il motore è disinserito.
● Non è possibile comunicare con il convertitore né tramite Operator Panel, né attraverso
altre interfacce.
● I LED si accendono in modo intermittente e dopo 3 minuti il convertitore non si è ancora
avviato.
Procedura
Per ripristinare le impostazioni di fabbrica del convertitore, procedere nel modo seguente:
1. Se nel convertitore è presente una scheda di memoria, estrarla.
2. Disinserire la tensione di alimentazione del convertitore.
3. Attendere lo spegnimento di tutti i LED del convertitore. Reinserire la tensione di
alimentazione del convertitore.
4. Ripetere le operazioni indicate ai punti 2 e 3 finché il convertitore non segnala l'anomalia
F01018.
5. Impostare p0971 = 1.
6. Disinserire la tensione di alimentazione del convertitore.
7. Attendere lo spegnimento di tutti i LED del convertitore. Reinserire la tensione di
alimentazione del convertitore.
Ora il convertitore si avvia con le impostazioni di fabbrica.
8. Mettere nuovamente in servizio il convertitore.
Le impostazioni di fabbrica del convertitore sono state ripristinate.
Convertitori con le Control Unit CU240B-2 e CU240E-2
308
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Riparazione
10.10 Se il convertitore non ha alcuna reazione
Caso 2
● Il motore è disinserito.
● Non è possibile comunicare con il convertitore né tramite Operator Panel, né attraverso
altre interfacce.
● I LED lampeggiano e si spengono; l'operazione si ripete continuamente.
Procedura
Per ripristinare le impostazioni di fabbrica del convertitore, procedere nel modo seguente:
1. Se nel convertitore è presente una scheda di memoria, estrarla.
2. Disinserire la tensione di alimentazione del convertitore.
3. Attendere lo spegnimento di tutti i LED del convertitore. Reinserire la tensione di
alimentazione del convertitore.
4. Attendere finché i LED lampeggiano di luce arancione.
5. Ripetere le operazioni indicate ai punti 2 e 3 finché il convertitore non segnala l'anomalia
F01018.
6. Impostare p0971 = 1.
7. Disinserire la tensione di alimentazione del convertitore.
8. Attendere lo spegnimento di tutti i LED del convertitore. Reinserire la tensione di
alimentazione del convertitore.
Ora il convertitore si avvia con le impostazioni di fabbrica.
9. Mettere nuovamente in servizio il convertitore.
Le impostazioni di fabbrica del convertitore sono state ripristinate.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
309
Riparazione
10.10 Se il convertitore non ha alcuna reazione
Convertitori con le Control Unit CU240B-2 e CU240E-2
310
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvisi, anomalie e messaggi di sistema
11
Il convertitore prevede i seguenti tipi di diagnostica:
● LED
I LED presenti sul pannello frontale del convertitore segnalano gli stati principali del
convertitore.
● Avvisi e anomalie
Il convertitore segnala gli avvisi e le anomalie tramite:
– il bus di campo
– la morsettiera con l'impostazione adeguata
– un Operator Panel collegato
– STARTER.
Avvisi e anomalie hanno un numero univoco.
11.1
Stati di funzionamento segnalati tramite LED
Dopo l'inserzione della tensione di alimentazione, il LED RDY (Ready) diventa
temporaneamente arancione. Non appena il colore del LED RDY diventa rosso o verde, i
LED indicano lo stato del convertitore.
Stati dei segnali dei LED
Oltre agli stati dei segnali "Acceso" e "Spento" possono verificarsi due diverse frequenze di
lampeggio:
Tabella 11- 1 Diagnostica del convertitore
LED
Spiegazione
RDY
BF
VERDE - acceso
VERDE - lento
-----
Al momento non è presente nessuna anomalia
Messa in servizio o ripristino delle impostazioni di
fabbrica
VERDE - veloce
---
Il convertitore scrive i dati nella scheda di memoria
ROSSO - lento
---
Il convertitore attende la disinserzione e la
reinserzione dell'alimentazione di tensione dopo
l'aggiornamento del firmware
ROSSO - veloce
---
Al momento è presente un'anomalia
ROSSO - veloce
ROSSO - veloce
Scheda di memoria errata o aggiornamento del
firmware non riuscito
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
311
Avvisi, anomalie e messaggi di sistema
11.1 Stati di funzionamento segnalati tramite LED
Tabella 11- 2 Diagnostica del convertitore
LED LNK
VERDE - acceso
VERDE - lento
Off
Spiegazione
La comunicazione attraverso PROFINET è corretta.
La denominazione dell'apparecchio è attiva.
Nessuna comunicazione attraverso PROFINET.
Tabella 11- 3 Diagnostica della comunicazione tramite RS485
LED BF
Spiegazione
Acceso
Ricezione dei dati di processo
ROSSO - lento
ROSSO - veloce
GIALLO - frequenza
variabile
Bus attivo – nessun dato di processo
Nessuna attività del bus
Aggiornamento del firmware in corso
Tabella 11- 4 Diagnostica della comunicazione tramite PROFIBUS-DP
LED BF
off
ROSSO - lento
ROSSO - veloce
GIALLO - frequenza
variabile
Spiegazione
Traffico dati ciclico (o PROFIBUS non utilizzato, p2030 = 0)
Errore del bus - errore di configurazione
Errore del bus
- nessuno scambio di dati
- ricerca baud rate
- nessun collegamento
Aggiornamento del firmware in corso
Tabella 11- 5 Diagnostica delle funzioni di sicurezza
LED SAFE
GIALLO - acceso
Significato
Una o più funzioni di sicurezza sono abilitate, ma non attive.
GIALLO - lento
Una o più funzioni di sicurezza sono attive; si è verificato un errore
nelle funzioni di sicurezza.
GIALLO - veloce
Il convertitore ha rilevato un errore nelle funzioni di sicurezza e ha
avviato una procedura di arresto.
Convertitori con le Control Unit CU240B-2 e CU240E-2
312
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvisi, anomalie e messaggi di sistema
11.2 Runtime di sistema
11.2
Runtime di sistema
Valutando il runtime di sistema del convertitore si può decidere se occorre sostituire
componenti usurati come ventilatori, motori e riduttori.
Funzionamento
Il runtime di sistema viene avviato non appena si inserisce l'alimentazione della Control Unit.
Il runtime di sistema si arresta con la disinserzione della Control Unit.
Il runtime di sistema è pari a r2114[0] (millisecondi) e r2114[1] (giorni):
Runtime di sistema = r2114[1] × giorni + r2114[0] × millisecondi
Quando r2114[0] ha raggiunto un valore di 86.400.000 ms (24 ore), r2114[0] viene impostato
sul valore 0, quindi il valore di r2114[1] viene incrementato di 1.
In base al runtime di sistema è possibile ricostruire anche la sequenza temporale di
anomalie e avvisi. Alla visualizzazione di un'apposita segnalazione i valori del parametro
r2114 vengono assunti senza variazioni dai parametri corrispondenti del buffer degli avvisi o
delle anomalie, vedere il capitolo Avvisi, anomalie e messaggi di sistema (Pagina 311).
Parametri
Descrizione
r2114[0]
Runtime di sistema (ms)
r2114[1]
Runtime di sistema (giorni)
Il runtime di sistema non può essere reimpostato.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
313
Avvisi, anomalie e messaggi di sistema
11.3 Avvisi
11.3
Avvisi
Gli avvisi hanno le seguenti proprietà:
● Non hanno alcun effetto diretto nel convertitore e scompaiono quando viene rimossa la
causa
● Non possono essere tacitati
● Vengono segnalati nel modo seguente
– Segnalazione dello stato tramite il bit 7 della parola di stato 1 (r0052)
– sull'Operator Panel con Axxxxx
– tramite STARTER, quando si fa clic su TAB
sinistra
nella maschera di STARTER in basso a
Per comprendere meglio la causa di un avviso, per ognuno di essi vengono indicati un
codice e un valore univoci.
Buffer degli avvisi
In ogni avviso ricevuto il convertitore memorizza il codice, il valore e il tempo di arrivo.
Figura 11-1
Memorizzazione del primo avviso nel buffer degli avvisi
I parametri r2124 e r2134 contengono il valore di avviso, importante per la diagnostica, sotto
forma di numero a virgola fissa o mobile.
I tempi di avviso sono indicati in r2145 e r2146 (in giorni interi), nonché in r2123 e r2125 (in
millisecondi riferiti al giorno dell'avviso).
Il convertitore utilizza un temporizzatore interno per memorizzare i tempi degli avvisi.
Ulteriori informazioni sul temporizzatore sono disponibili nel capitolo Runtime di sistema
(Pagina 313).
Non appena l'avviso viene rimosso, il convertitore scrive il tempo relativo nei parametri r2125
e r2146. Anche dopo la rimozione, l'avviso rimane memorizzato nel buffer degli avvisi.
Un ulteriore avviso generato viene anch'esso memorizzato. Il primo avviso viene conservato
in memoria. Gli avvisi emessi vengono conteggiati in p2111.
Figura 11-2
Memorizzazione del secondo avviso nel buffer degli avvisi
Il buffer degli avvisi memorizza fino a otto avvisi. Qualora dopo l'ottavo avviso ne venga
generato un altro senza che sia stato rimosso alcuno degli ultimi otto, viene sovrascritto il
penultimo.
Convertitori con le Control Unit CU240B-2 e CU240E-2
314
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvisi, anomalie e messaggi di sistema
11.3 Avvisi
Figura 11-3
Buffer degli avvisi completo
Buffer degli avvisi vuoto: Cronologia avvisi
La cronologia degli avvisi registra fino a 56 avvisi.
Nella cronologia vengono memorizzati solo gli avvisi eliminati dal buffer degli avvisi. Quando
il buffer è pieno e viene generato un ulteriore avviso, il convertitore trasferisce tutti gli avvisi
eliminati dal buffer alla cronologia degli avvisi. Nella cronologia gli avvisi vengono ordinati
per "Tempo di arrivo", ma in sequenza inversa rispetto al buffer degli avvisi:
● l'avviso più recente è contenuto nell'indice 8
● il secondo avviso più recente viene memorizzato nell'indice 9
● e così via
Figura 11-4
Spostamento degli avvisi eliminati nella cronologia degli avvisi
Gli avvisi non rimossi restano nel buffer degli avvisi. Il convertitore riordina gli avvisi e colma
gli spazi vuoti tra gli avvisi.
Qualora la cronologia degli avvisi sia piena fino all'indice 63, quando si accetta un nuovo
avviso nella cronologia degli avvisi viene cancellato l'avviso meno recente.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
315
Avvisi, anomalie e messaggi di sistema
11.3 Avvisi
Parametri del buffer degli avvisi e della cronologia degli avvisi
Parametri
Descrizione
r2122
Codice di avviso
Visualizzazione dei numeri degli avvisi generati
r2123
Tempo in cui è avvenuto l'avviso, in millisecondi
Visualizzazione del tempo, in millisecondi, in cui si è verificato l'avviso
r2124
Valore di avviso
Indica le informazioni aggiuntive sull'avviso generato
r2125
Tempo di eliminazione avviso in millisecondi
Visualizzazione del tempo, in millisecondi, in cui è stato eliminato l'avviso
p2111
Contatore avvisi
Numero degli avvisi emessi dopo l'ultimo ripristino
Con p2111 = 0 tutti gli avvisi passati del buffer avvisi [0...7] vengono copiati nella
cronologia avvisi [8...63]
r2145
Tempo di arrivo avviso in giorni
Visualizzazione del tempo, in giorni, in cui è stato generato l'avviso
r2132
Codice di avviso attuale
Visualizzazione del codice dell'ultimo avviso generato
r2134
Valore dell'avviso per valori Float
Visualizzazione delle informazioni aggiuntive dell'avviso generato per valori Float
r2146
Tempo di eliminazione avviso in giorni
Visualizzazione del tempo, in giorni, in cui si è stato eliminato l'avviso
Impostazioni avanzate per gli avvisi
Parametri
Descrizione
È possibile modificare fino a 20 avvisi in un'anomalia e sopprimere gli avvisi:
p2118
Impostare numero di messaggio per tipo di messaggio
Selezione degli avvisi per i quali viene modificato il tipo di messaggio
p2119
Impostazione tipo di messaggio
Impostazione del tipo di messaggio per l'avviso selezionato
1: Anomalia
2: Avviso
3: Nessun messaggio
I relativi dettagli sono disponibili nello schema logico 8075 e nella descrizione dei parametri
del Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
316
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvisi, anomalie e messaggi di sistema
11.4 Anomalie
11.4
Anomalie
Un'anomalia segnala un errore grave nel funzionamento del convertitore.
Il convertitore segnala in questo modo la presenza di un'anomalia:
● sull'Operator Panel con Fxxxxx
● sul convertitore tramite il LED RDY
● nel bit 3 della parola di stato 1 (r0052)
● tramite STARTER
Per eliminare un messaggio occorre rimuovere la causa e confermare l'anomalia.
Ad ogni anomalia è associato un codice di anomalia univoco e anche un valore. Queste
informazioni consentono di risalire alla causa dell'anomalia.
Buffer delle anomalie attuali
Per ogni anomalia ricevuta il convertitore memorizza l'ora, il codice e il valore di anomalia.
Figura 11-5
Memorizzazione della prima anomalia nel buffer delle anomalie
I parametri r0949 e r2133 contengono il valore di anomalia, importante per la diagnostica,
sotto forma di numero a virgola fissa o mobile.
Il "Tempo in cui è avvenuta l'anomalia" è indicato dai parametri r2130 (in giorni interi) nonché
in r0948 (in millisecondi riferiti al giorno dell'anomalia). Il "Tempo di eliminazione anomalia"
viene registrato nei parametri r2109 e r2136 alla conferma dell'anomalia.
Il convertitore utilizza un temporizzatore interno per memorizzare i tempi delle anomalie.
Ulteriori informazioni sul temporizzatore sono disponibili nel capitolo Runtime di sistema
(Pagina 313).
Quando si verifica un'ulteriore anomalia viene memorizzata qualora la prima non sia stata
confermata. La memorizzazione della prima anomalia viene conservata. Le anomalie
generate vengono conteggiate in p0952. Un caso di anomalia può contenere una o più
anomalie.
Figura 11-6
Memorizzazione della seconda anomalia nel buffer delle anomalie
Il buffer delle anomalie memorizza fino a otto anomalie. Qualora dopo l'ottava anomalia ne
venga generata un'altra, la penultima viene sovrascritta.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
317
Avvisi, anomalie e messaggi di sistema
11.4 Anomalie
Figura 11-7
Buffer delle anomalie pieno
Tacitazione
Nella maggior parte dei casi si dispone delle seguenti possibilità, per confermare
un'anomalia:
● Disattivare e riattivare l'alimentazione di tensione del convertitore.
● Pressione del tasto di tacitazione dell'Operator Panel
● Segnale di tacitazione sull'ingresso digitale 2
● Segnale di tacitazione del bit 7 della parola di comando 1 (r0054) nelle Control Unit con
interfaccia del bus di campo
Le anomalie dovute alla sorveglianza interna al convertitore di hardware e firmware possono
essere confermate solo mediante disinserzione e reinserzione. Nella lista anomalie del
Manuale delle liste è riportata una descrizione di questa possibilità limitata per la conferma
delle anomalie.
Svuotamento buffer anomalie: Cronologia delle anomalie
La cronologia delle anomalie registra fino a 56 anomalie.
La conferma non ha effetto fintanto che una delle cause dell'anomalia non viene rimossa dal
relativo buffer. Se almeno una delle anomalie nel buffer viene rimossa (la causa è eliminata)
e l'utente tacita le anomalie, si verifica quanto segue:
Convertitori con le Control Unit CU240B-2 e CU240E-2
318
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvisi, anomalie e messaggi di sistema
11.4 Anomalie
1. Il convertitore salva tutte le anomalie del buffer nelle prime otto posizioni di memoria della
cronologia (indici 8 … 15).
2. Il convertitore cancella dal buffer le anomalie eliminate.
3. Il convertitore registra nei parametri r2136 e r2109 (Tempo di eliminazione anomalia) l'ora
in cui sono state confermate.
Figura 11-8
Cronologia anomalie in base alla tacitazione delle anomalie
Una volta confermate, le anomalie non rimosse restano iscritte sia nel buffer che nella
cronologia delle anomalie. Per queste anomalie resta invariato il "Tempo in cui è avvenuta
l'anomalia" e resta vuoto il "Tempo di eliminazione anomalia".
Quando meno di otto anomalie vengono spostate o copiate nella cronologia anomalie, gli
spazi di memoria con gli indici maggiori rimangono vuoti.
Il convertitore trasferisce in blocco di otto indici i valori precedentemente memorizzati nella
cronologia delle anomalie. Le anomalie che erano memorizzate negli indici 56 ... 63, prima
della tacitazione, vengono cancellate.
Cancellazione della cronologia delle anomalie
Per cancellare tutte la anomalie dalla cronologia, impostare a zero il parametro p0952.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
319
Avvisi, anomalie e messaggi di sistema
11.4 Anomalie
Parametri del buffer delle anomalie e cronologia delle anomalie
Parametri
Descrizione
r0945
Codice anomalia
Visualizzazione dei numeri delle anomalie verificatesi
r0948
Tempo in cui è avvenuta l'anomalia in millisecondi
Visualizzazione del tempo, in millisecondi, in cui si è verificata l'anomalia
r0949
Valore anomalia
Indica le informazioni aggiuntive sull'anomalia verificatasi
p0952
Contatore anomalie
Numero dei casi di anomalia verificatisi dopo l'ultima tacitazione.
Con p0952 = 0 viene svuotato il buffer delle anomalie
r2109
Tempo di eliminazione anomalia in millisecondi
Visualizzazione dell'ora, in millisecondi, in cui è stata eliminata l'anomalia
r2130
Tempo in cui è avvenuta l'anomalia in giorni
Visualizzazione del tempo, espresso in giorni, in cui si è verificata l'anomalia
r2131
Cod.anomalia att.
Visualizzazione del codice dell'anomalia meno recente ancora attiva
r2133
Valore di anomalia per valori Float
Visualizzazione delle informazioni aggiuntive dell'anomalia verificatasi per valori
Float
r2136
Tempo di eliminazione anomalia in giorni
Visualizzazione del tempo, in giorni, in cui è stata eliminata l'anomalia
Non è possibile inserire il motore.
Qualora non sia possibile inserire il motore, verificare quanto segue:
● È presente un'anomalia?
In caso affermativo, eliminarne la causa e confermare l'anomalia.
● p0010 = 0?
In caso negativo, il convertitore si trova ad es. ancora nello stato di messa in servizio.
● Il convertitore comunica lo stato "Pronto all'inserzione" (r0052.0 = 1)?
● Vengono generati errori relativi al convertitore (r0046)?
● In che modo il convertitore riceve il valore di riferimento e i comandi (p0015)?
Convertitori con le Control Unit CU240B-2 e CU240E-2
320
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvisi, anomalie e messaggi di sistema
11.4 Anomalie
Impostazioni avanzate per le anomalie
Parametri
Descrizione
È possibile modificare la reazione all'anomalia del motore per un massimo di 20 codici anomalia:
p2100
Impostare numero di anomalia per reazione all'anomalia
Selezione delle anomalie per le quali viene impostata la reazione all'anomalia
p2101
Impostazione reazione all'anomalia
Impostazione della reazione per l'anomalia selezionata
È possibile modificare il tipo di tacitazione per un massimo di 20 codici di anomalia:
p2126
Impostare numero di anomalia per modalità di tacitazione
Selezione delle anomalie per le quali viene modificato il tipo di conferma
p2127
Impostazione modalità di tacitazione
Impostazione del tipo di conferma per l'anomalia selezionata
1: Conferma solo con POWER ON
2: Conferma IMMEDIATA dopo l'eliminazione della causa di anomalia
È possibile modificare fino a 20 anomalie diverse in un avviso oppure sopprimerle:
p2118
Impostare numero di messaggio per tipo di messaggio
Selezione dei messaggi per i quali occorre modificare il tipo di messaggio
p2119
Impostazione tipo di messaggio
Impostazione del tipo di messaggio per l'anomalia selezionata
1: Anomalia
2: Avviso
3: Nessun messaggio
I relativi dettagli sono disponibili nello schema logico 8075 e nella descrizione dei parametri
del Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
321
Avvisi, anomalie e messaggi di sistema
11.5 Lista degli avvisi e delle anomalie
11.5
Lista degli avvisi e delle anomalie
Axxxxx: Avviso
Fyyyyy: Anomalia
Tabella 11- 6 Principali avvisi ed anomalie delle funzioni di sicurezza
Numero
Causa
Rimedio
F01600
STOP A attivato
Attivare e poi disattivare la funzione STO .
F01650
Prova di collaudo necessaria
Eseguire la prova di collaudo e redigere il relativo certificato.
Infine disattivare e riattivare la Control Unit.
F01659
Richiesta di scrittura parametri
rifiutata
Causa: Il convertitore dovrebbe essere ripristinato alle impostazioni di
fabbrica. Il ripristino delle funzioni di sicurezza, tuttavia, non è consentito
poiché le funzioni di sicurezza sono attualmente abilitate.
Rimedio con Operator Panel:
p0010 = 30
Reset parametri
p9761 = …
Immettere la password per le funzioni di sicurezza.
p0970 = 5
Avvio del ripristino dei parametri Safety.
Il convertitore imposta p0970 = 5 dopo aver ripristinato i
parametri.
Infine ripristinare il convertitore alle impostazioni di fabbrica.
A01666
Segnale 1 statico su F-DI per
tacitazione sicura
Impostare F-DI sul segnale logico 0.
A01698
Modo di messa in servizio per
funzioni di sicurezza attivo
Questo messaggio scompare al termine della messa in servizio Safety.
A01699
Test dei circuiti di disinserzione
necessario
Dopo la successiva disattivazione della funzione "STO", il messaggio
scompare e il tempo di sorveglianza viene resettato.
F30600
STOP A attivato
Attivare e poi disattivare la funzione STO .
Convertitori con le Control Unit CU240B-2 e CU240E-2
322
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvisi, anomalie e messaggi di sistema
11.5 Lista degli avvisi e delle anomalie
Tabella 11- 7 Anomalie tacitabili solo tramite disinserzione e reinserzione del convertitore (Power On Reset)
Numero
Causa
Rimedio
F01000
Errore software della CU
Sostituire la CU.
F01001
Esclusione Floating Point
Spegnere e riaccendere la CU.
F01015
Errore software della CU
Aggiornare il firmware o rivolgersi all'assistenza tecnica.
F01018
Avvio interrotto più volte
Dopo l'emissione di questa anomalia il convertitore si avvia con le
impostazioni di fabbrica.
Rimedio: Salvare le impostazioni di fabbrica con p0971=1. Spegnere e
riaccendere la CU. Rimettere quindi in servizio il convertitore.
F01040
Salvataggio dei parametri
necessario
Salvare i parametri (P0971)
Spegnere e riaccendere la CU.
F01044
Errore nel caricamento di dati della Sostituire la scheda di memoria o la CU.
scheda di memoria
F01105
CU: Memoria insufficiente
Ridurre il numero dei set di dati.
F01205
CU: Overflow int.tempo
Rivolgersi all'assistenza tecnica.
F01250
Errore hardware della CU
Sostituire la CU.
F01512
Si è tentato di calcolare un fattore
Impostare la normazione o verificare il valore di trasferimento.
di conversione per una normazione
non esistente.
F01662
Errore hardware della CU
Spegnere e riaccendere la CU, aggiornare il firmware oppure rivolgersi
all'assistenza tecnica.
F30022
Power Module: Sorveglianza UCE
Controllare o sostituire il Power Module.
F30052
Dati della parte di potenza errati
Sostituire il Power Module oppure aggiornare il firmware della CU.
F30053
Dati FPGA errati
Sostituire il Power Module.
F30662
Errore hardware della CU
Spegnere e riaccendere la CU, aggiornare il firmware oppure rivolgersi
all'assistenza tecnica.
F30664
Avvio della CU interrotto
Spegnere e riaccendere la CU, aggiornare il firmware oppure rivolgersi
all'assistenza tecnica.
F30850
Errore software nel Power Module
Sostituire il Power Module oppure rivolgersi all'assistenza tecnica.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
323
Avvisi, anomalie e messaggi di sistema
11.5 Lista degli avvisi e delle anomalie
Tabella 11- 8 Avvisi e anomalie principali
Numero
Causa
Rimedio
F01018
Avvio interrotto più volte
1. Disinserire e reinserire l'unità.
2. Dopo che è stata emessa quest'anomalia, l'unità viene avviata con le
impostazioni di fabbrica.
3. Mettere nuovamente in servizio il convertitore.
A01028
Errore di configurazione
Spiegazione: La parametrizzazione nella scheda di memoria è stata
generata con un'unità di altro tipo (numero di ordinazione, MLFB).
Verificare i parametri dell'unità ed eseguire eventualmente una nuova
messa in servizio.
F01033
Commutazione unità: valore del
parametro di riferimento non valido
Impostare il parametro di riferimento a un valore diverso da zero 0.0
(p0304, p0305, p0310, p0596, p2000, p2001, p2002, p2003, r2004).
F01034
Commutazione unità: Calcolo dei
valori dei parametri fallito dopo la
modifica del valore di riferimento
Selezionare il valore del parametro di riferimento in modo che i parametri
interessati possano essere calcolati in rappresentazione relativa (p0304,
p0305, p0310, p0596, p2000, p2001, p2002, p2003, r2004).
A01053
Misura sovraccarico del sistema
F01054
Limite di sistema superato
È stata superata la potenza di calcolo massima della Control Unit. Le
seguenti misure riducono il carico della Control Unit:
•
Utilizzare solo un set di dati (CDS e DDS)
•
Utilizzare solo le funzioni di sicurezza delle funzioni di base
•
Disattivare il regolatore PID
•
Utilizzare il generatore di rampa semplice anziché il generatore di
rampa esteso
•
Non utilizzare blocchi funzione liberi
•
Ridurre il tempo di campionamento dei blocchi funzione liberi
F01122
Frequenza troppo elevata su
ingresso tastatore di misura
Ridurre la frequenza degli impulsi sull'ingresso del tastatore di misura.
A01590
Intervallo di manutenzione motore
scaduto
Eseguire la manutenzione e reimpostare l'intervallo di manutenzione
(p0651).
A01900
PROFIBUS: Telegramma di
configurazione errato
Spiegazione: un master PROFIBUS tenta di stabilire un collegamento con
un telegramma di configurazione errato.
A01910
F01910
Timeout del valore di riferimento
Viene generato l'allarme quando p2040 ≠ 0 ms ed esiste una delle
seguenti cause:
Verificare la progettazione del bus sul lato master e sul lato slave.
A01920
•
collegamento bus interrotto
•
master MODBUS disinserito
•
errore di comunicazione (CRC, bit di parità, errore logico)
•
valore troppo basso del tempo di sorveglianza del bus di campo
(p2040)
PROFIBUS: Interruzione
collegamento ciclico
Spiegazione: Il collegamento ciclico con il master PROFIBUS è interrotto.
F03505
Rottura del conduttore
nell'ingresso analogico
Controllare la presenza di eventuali interruzioni del cablaggio.
Verificare l'intensità del segnale immesso.
La corrente di ingresso misurata dall'ingresso analogico può essere letta
in r0752.
A03520
Errore sensore di temperatura
Verificare il corretto collegamento del sensore.
Stabilire il collegamento con PROFIBUS e attivare il master PROFIBUS
con funzionamento ciclico.
Convertitori con le Control Unit CU240B-2 e CU240E-2
324
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvisi, anomalie e messaggi di sistema
11.5 Lista degli avvisi e delle anomalie
Numero
Causa
Rimedio
A05000
A05001
A05002
A05004
A05006
Sovratemperatura del Power
Module
Controllare quanto segue:
- La temperatura ambiente rientra nei limiti definiti?
- Le condizioni di carico e il ciclo sono progettati in maniera
proporzionale?
- Si è verificato un guasto del sistema di raffreddamento?
F06310
Tensione di collegamento (p0210)
impostata in modo errato
Controllare ed eventualmente modificare la tensione di collegamento
impostata (p0210).
Controllare la tensione di rete.
F07011
Surriscaldamento motore
Ridurre il carico del motore.
Verificare la temperatura ambiente.
Controllare il cablaggio e il collegamento del sensore.
A07012
Sovratemperatura modello motore
I2t
Controllare il carico del motore ed eventualmente ridurlo.
Controllare la temperatura ambiente del motore.
Controllare la costante di tempo termica p0611.
Controllare la soglia di anomalia della sovratemperatura p0605.
A07015
F07016
Avviso sensore di temperatura del
motore
Verificare il corretto collegamento del sensore.
Anomalia sensore temperatura
motore
Controllare che il collegamento del sensore sia corretto.
Verificare la parametrizzazione (p0601).
Controllare la parametrizzazione (p0601).
Disattivare la valutazione dell'anomalia del sensore di temperatura del
motore (p0607 = 0).
F07086
F07088
Commutazione unità: Violazione di
limite di parametro
Controllare i valori dei parametri adattati ed eventualmente correggerli.
F07320
Riavvio automatico interrotto
Aumentare il numero dei tentativi di avvio (p1211). Il numero attuale di
tentativi di riavvio viene visualizzato in r1214.
Aumentare il tempo di attesa in p1212 e/o il tempo di sorveglianza in
p1213.
Applicare il comando ON (p0840).
Aumentare o disattivare il tempo di sorveglianza della parte di potenza
(p0857).
Diminuire il tempo di attesa per il reset del contatore anomalie p1213[1] in
modo che vengano registrate meno anomalie nell'intervallo di tempo.
A07321
Riavvio automatico attivo
Spiegazione: La modalità di reinserzione automatica (RA) è attiva. Con il
ripristino della rete e/o l'eliminazione delle cause di anomalia,
l'azionamento si reinserisce automaticamente.
F07330
Corrente di ricerca troppo bassa
Aumentare la corrente di ricerca (p1202), controllare il collegamento del
motore.
A07400
Regolatore tensione massima del
circuito intermedio attivo
Regolazione vettoriale o controllo U/f:
Se non si desidera l'intervento del regolatore:
•
Aumentare i tempi di decelerazione.
•
Disinserire la regolazione Vdc_max (p1240 = 0 con regolazione
vettoriale, p1280 = 0 con controllo U/f).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
325
Avvisi, anomalie e messaggi di sistema
11.5 Lista degli avvisi e delle anomalie
Numero
Causa
Rimedio
Servoregolazione:
Nessuna misura necessaria; l'avviso scompare automaticamente quando
viene superata nettamente la soglia superiore in negativo.
Provvedimenti possibili:
•
A07409
F07426
F07801
Controllo U/f regolatore limitazione
di corrente attivo
Utilizzare un Braking Module o un'unità di recupero non regolata,
aumentare i tempi di decelerazione (p1121, p1135), disinserire il
regolatore Vdc_max (p1240 = 0).
L'avviso scompare automaticamente prendendo uno dei seguenti
provvedimenti:
•
Aumentare il limite di corrente (p0640).
•
Ridurre il carico.
•
Utilizzare rampe di accelerazione più lente per il numero di giri di
riferimento.
Regolatore PID, valore attuale
limitato
•
Adeguare i limiti al livello del segnale (p2267, p2268).
•
Verificare la scalatura del valore attuale (p2264).
Sovracorrente del motore
Verificare i limiti di corrente (p0640).
Regolazione vettoriale: verificare il regolatore di corrente (p1715, p1717).
Controllo U/f: verificare il regolatore di limitazione di corrente
(p1340 … p1346).
Aumentare la rampa di accelerazione (p1120) o ridurre il carico.
Verificare l'assenza di cortocircuiti o cortocircuiti verso terra nel motore e
nei cavi motore.
Verificare la commutazione stella/triangolo e la parametrizzazione della
targhetta del motore.
Verificare la combinazione Parte di potenza – Motore.
Selezionare la funzione di riavviamento al volo (p1200) se l'inserimento
avviene sul motore in funzione.
A07805
F07806
Azionamento: parte di potenza,
sovraccarico I2t
Limite di potenza generatorio
superato
•
Ridurre il carico continuo.
•
Adattare ciclo di carico.
•
Verificare l'assegnazione delle correnti nominali di motore e parte di
potenza.
Aumentare la rampa di decelerazione.
Ridurre il carico di azionamento
Impiegare una parte di potenza con capacità di recupero più elevata.
Nella regolazione vettoriale, il limite di potenza generatorio in p1531 può
essere ridotto in misura tale che l'anomalia non intervenga più.
F07807
A07850
A07851
A07852
Rilevato cortocircuito
Avviso esterno 1 ... 3
•
Verificare il collegamento sul lato motore del convertitore per
individuare un eventuale cortocircuito conduttore-conduttore.
•
Verificare che non si sia verificato uno scambio tra cavi motore e cavi
di rete.
È stato emesso il segnale per "Avviso esterno 1".
I parametri p2112, p2116 e p2117 definiscono le sorgenti di segnale
dell'avviso esterno 1… 3.
Rimedio: eliminare le cause che provocano questi avvisi.
Convertitori con le Control Unit CU240B-2 e CU240E-2
326
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvisi, anomalie e messaggi di sistema
11.5 Lista degli avvisi e delle anomalie
Numero
Causa
Rimedio
F07860
F07861
F07862
Anomalia esterna 1 ... 3
Eliminare le cause esterne di questa anomalia.
F07900
Motore bloccato
Verificare che il motore possa girare liberamente.
Controllare i limiti di coppia (r1538 e r1539).
Verificare i parametri della segnalazione "Motore bloccato" (p2175,
p2177).
F07901
Fuorigiri motore
Attivare il precomando del regolatore di limitazione del numero di giri
(p1401 bit 7 = 1).
Aumentare l'isteresi per il messaggio di numero di giri eccessivo p2162.
F07902
Motore in stallo
Controllare che i dati del motore siano impostati correttamente ed
eseguire un'identificazione motore.
Verificare i limiti di corrente (p0640, r0067, r0289). Se i limiti di corrente
sono troppo bassi, è impossibile rimagnetizzare l'azionamento.
Controllare se i cavi del motore vengono separati durante il
funzionamento.
A07903
A07910
Scostamento del numero di giri del
motore
Aumentare p2163 e/o p2166.
Surriscaldamento motore
Verificare il carico del motore.
Aumentare i limiti di coppia, corrente e potenza.
Controllare la temperatura ambiente del motore.
Verificare il sensore KTY84.
Verificare le sovratemperature del modello termico (p0626 ... p0628).
A07920
Coppia/numero di giri troppo basso La coppia si discosta dalla linea di inviluppo coppia / numero di giri.
A07921
Coppia/numero di giri troppo alto
•
A07922
Coppia/numero di giri fuori
tolleranza
Verificare il collegamento tra motore e carico.
•
Adattare la parametrizzazione secondo il carico.
F07923
Coppia/numero di giri troppo basso •
Coppia/numero di giri troppo alto
•
F07924
Verificare il collegamento tra motore e carico.
Adattare la parametrizzazione secondo il carico.
A07927
Frenatura in corrente continua
attiva
Non necessaria
A07980
Misura in rotazione attivata
Non necessaria
A07981
Misura in rotazione, abilitazioni
mancanti
Tacitare le anomalie presenti.
A07991
Identificazione dati motore attivata
Inserire il motore e identificare i dati motore.
F08501
Timeout del valore di riferimento
•
Verificare il collegamento PROFINET.
•
Impostare il controller nello stato RUN.
•
In caso di anomalie ripetute, controllare il tempo di sorveglianza
p2044 impostato.
Impostare le abilitazioni mancanti (vedere r00002, r0046).
F08502
Tempo di sorveglianza segnale di
attività scaduto
•
Verificare il collegamento PROFINET.
F08510
Dati di configurazione per l'invio
non validi
•
Verificare la configurazione PROFINET
A08511
Dati di configurazione per la
ricezione non validi
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
327
Avvisi, anomalie e messaggi di sistema
11.5 Lista degli avvisi e delle anomalie
Numero
Causa
Rimedio
A08526
Nessun collegamento ciclico
•
Attivare il controller con funzionamento ciclico.
•
Verificare i parametri "Name of Station" e "IP of Station" (r61000,
r61001).
A08565
F08700
Errore di coerenza nei parametri di
impostazione
Comunicazione errata
Verificare quanto segue:
•
Indirizzo IP, maschera di subnet o Default Gateway non corretto.
•
Indirizzo IP o nome di stazione nella rete presenti due volte.
•
Il nome di stazione contiene caratteri non validi.
Si è verificato un errore nella comunicazione CAN. Verificare quanto
segue:
•
Cavo bus.
•
Baud rate (p8622).
•
Bit Timing (p8623).
• Master
Avviare il controller CAN con p8608 = 1 dopo aver eliminato
manualmente la causa dell'errore.
F13100
Protezione know-how: errore di
protezione contro la copia
La protezione know-how e la protezione contro la copia per la scheda di
memoria sono attive. Nel verificare la scheda di memoria è stato
riscontrato un errore.
•
Inserire la scheda di memoria adatta, disinserire temporaneamente la
tensione di alimentazione del convertitore e quindi reinserirla
(POWER ON).
•
Disattivare la protezione contro la copia (p7765).
F13101
Protezione know-how: protezione
contro la copia non attivabile
Inserire una scheda di memoria valida.
F30001
Sovracorrente
Verificare quanto segue:
•
Controllare i dati del motore, eventualmente eseguire la messa in
servizio
•
Tipo di circuito del motore (Υ / Δ)
•
Funzionamento U/f: controllare l'assegnazione delle correnti nominali
di motore e parte di potenza
•
Qualità della rete
•
Collegamento corretto della bobina di commutazione di rete
•
Collegamento dei cavi di potenza
•
Verificare l'assenza di cortocircuiti o errori di messa a terra nei cavi di
potenza
•
Lunghezza dei cavi di potenza
•
Fasi di rete
Nel caso in cui ciò non serva:
•
Funzionamento U/f: aumentare la rampa di accelerazione
•
Ridurre il carico
•
Sostituire la parte di potenza
Convertitori con le Control Unit CU240B-2 e CU240E-2
328
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Avvisi, anomalie e messaggi di sistema
11.5 Lista degli avvisi e delle anomalie
Numero
Causa
Rimedio
F30002
Sovratensione circuito intermedio
F30003
Sottotensione del circuito
intermedio
Aumentare il tempo di decelerazione (p1121).
Impostare i tempi di arrotondamento (p1130, p1136).
Attivare il regolatore di tensione del circuito intermedio (p1240, p1280).
Verificare la tensione di rete (p0210).
Verificare le fasi di rete.
Verificare la tensione di rete (p0210).
F30004
Sovratemperatura del convertitore
Verificare che la ventola del convertitore funzioni.
Verificare che la temperatura ambiente rientri nell'intervallo consentito.
Controllare che il motore non sia in sovraccarico.
Ridurre la frequenza degli impulsi.
F30005
Sovraccarico I2t convertitore
F30011
Interruzione della fase di rete
Verificare le correnti nominali del motore e del Power Module.
Ridurre il limite di corrente p0640.
Nel funzionamento con caratteristica U/f: diminuire p1341.
Controllare i fusibili di ingresso del convertitore.
Verificare i cavi di alimentazione del motore.
F30015
Mancanza di fase cavo di
alimentazione del motore
F30021
Cortocircuito verso terra
F30027
Sorveglianza del tempo di
precarica del circuito intermedio
F30035
Surriscaldamento dell'aria in
ingresso
F30036
Sovratemperatura spazio interno
F30037
Surriscaldamento del raddrizzatore Vedere F30035 e inoltre:
• Controllare il carico del motore.
• Controllare le fasi di rete.
A30049
Guasto ventilatore interno
Controllare il ventilatore interno ed eventualmente sostituirlo.
F30059
Guasto ventilatore interno
Controllare il ventilatore interno ed eventualmente sostituirlo.
A30502
Sovratensione del circuito
intermedio
•
Verificare la tensione di collegamento apparecchi (p0210).
•
Verificare il dimensionamento della bobina di rete.
A30920
Errore sensore di temperatura
Verificare il corretto collegamento del sensore.
A50001
Errore di configurazione
PROFINET
Un controller PROFINET tenta di stabilire un collegamento con un
telegramma di configurazione errato. Verificare se "Shared Device" è
attivato (p8929 = 2).
A50010
Name of Station PROFINET non
valido
Correggere (p8920) e attivare (p8925 = 2) Name of Station.
A50020
PROFINET: secondo controller
mancante
"Shared Device" è attivato (p8929 = 2). Tuttavia è disponibile solo il
collegamento con un controller PROFINET.
Verificare i cavi di alimentazione del motore.
Aumentare la rampa di accelerazione o di decelerazione (p1120).
• Controllare le connessioni dei cavi di potenza.
• Controllare il motore.
• Controllare il trasformatore di corrente.
• Controllare i cavi e i contatti del collegamento del freno (per
individuare eventuali conduttori interrotti).
Verificare la tensione di rete sui morsetti di ingresso.
Verificare l'impostazione della tensione di rete (p0210).
• Verificare che il ventilatore funzioni.
• Controllare filtri del ventilatore.
• Verificare che la temperatura ambiente sia compresa nell'intervallo
consentito.
Ulteriori informazioni sono disponibili nel Manuale delle liste.
Per maggiori informazioni vedere il Manuale delle liste
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
329
Avvisi, anomalie e messaggi di sistema
11.5 Lista degli avvisi e delle anomalie
.
Convertitori con le Control Unit CU240B-2 e CU240E-2
330
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
12
Dati tecnici
12.1
Dati tecnici, Control Unit CU240B-2
Tabella 12- 1
Caratteristica
Dati
Numeri di ordinazione
6SL3244-0BB00-1BA1
6SL3244-0BB00-1PA1
Tensione di esercizio
Con interfaccia RS485 per i protocolli seguenti:
•
USS
•
Modbus RTU
Con interfaccia PROFIBUS.
•
Alimentazione dal Power Module
•
o esternamente tramite i morsetti 31 e 32 con tensione DC 24 V, massimo 200 VA
Utilizzare un'alimentazione con bassa tensione di protezione (PELV= Protective Extra Low
Voltage secondo EN 61800-5-1): l'alimentazione di tensione a 0 V deve essere collegata a
bassa resistenza con il conduttore di protezione PE dell'impianto.
Esempio: alimentatore SITOP Power 5 A.
La tensione di alimentazione è isolata galvanicamente dai morsetti di comando.
Corrente assorbita
max 0,5 A
Potenza dissipata
5,0 W
Tensioni di uscita
+24 V out (morsetto 9),18 V … 28,8 V, max. 100 mA
Più la potenza dissipata delle tensioni di uscita.
+10 V out (morsetti 1 e 35), 9,5 V … 10,5 V, max. 10 mA
Risoluzione del valore di
riferimento
0,01 Hz
Ingressi digitali
4 (DI 0 … DI 3)
Ingresso analogico
1 (AI 0)
•
Low < 5 V, high > 11 V
•
con separazione di potenziale
•
tensione di ingresso massima 30 V
•
corrente assorbita 5,5 mA
•
compatibilità con SIMATIC
•
commutabili PNP/NPN
•
tempo di reazione 10 ms con tempo di antirimbalzo
p0724 = 0.
•
Ingresso differenziale
•
commutabile: 0 V … 10 V, 0 mA … 20 mA o -10 V … +10 V
•
risoluzione 12 bit
•
tempo di reazione 13 ms ± 1 ms
•
se AI 0 è configurato come ingresso digitale aggiuntivo:
Low < 1,6 V, High > 4,0 V,
tempo di reazione 13 ms ± 1 ms con tempo di antirimbalzo
p0724 = 0.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
331
Dati tecnici
12.1 Dati tecnici, Control Unit CU240B-2
Caratteristica
Dati
Uscita digitale / uscita
relè
1 (DO 0)
•
30 V DC / max. 0,5 A con carico ohmico
•
tempo di aggiornamento 2 ms
Per le applicazioni che richiedono una certificazione UL è necessario rispettare una tensione
riferita al potenziale di terra di 30 V DC sul DO 0 e fornire un'alimentazione elettrica di classe 2
dotata di messa a terra.
Uscita analogica
Sensore di temperatura
1 (AO 0)
PTC
KTY84
•
0 V … 10 V o 0 mA … 20 mA
•
potenziale di riferimento: "GND"
•
risoluzione 16 bit
•
tempo di aggiornamento 4 ms
•
sorveglianza cortocircuito 22 Ω
•
soglia di commutazione 1650 Ω
•
sorveglianza cortocircuito < 50 Ω
•
rottura conduttore > 2120 Ω
Interruttore termostatico con contatto senza potenziale.
Interfaccia USB
Mini-B
Dimensioni (L x A x P)
73 mm × 199 mm × 39 mm
Peso
0,49 kg
Schede di memoria
MMC
Suggerimento: 6SL3254-0AM00-0AA0
SD
Suggerimento: 6ES7954-8LB00-0AA0
Non sono ammesse schede SDHC (SD High Capacity).
0 °C … 55 °C
Nel funzionamento senza Operator Panel inserito.
0 °C … 50 °C
Nel funzionamento con Operator Panel inserito.
Temperatura di esercizio
Il dato relativo alla profondità è valido in caso di montaggio sul
Power Module.
Rispettare le eventuali limitazioni della temperatura di esercizio dovute al Power Module.
Temperatura di
magazzinaggio
- 40 °C … 70 °C
Umidità relativa dell'aria
< 95 %
La condensa non è ammessa.
Convertitori con le Control Unit CU240B-2 e CU240E-2
332
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.2 Dati tecnici, Control Unit CU240E-2
12.2
Dati tecnici, Control Unit CU240E-2
Tabella 12- 2
Caratteristica
Dati
Numeri di ordinazione
6SL3244-0BB12-1BA1
6SL3244-0BB13-1BA1
Tensione di esercizio
Con interfaccia RS485 per i protocolli seguenti:
•
USS
•
Modbus RTU
6SL3244-0BB12-1PA1
6SL3244-0BB13-1PA1
Con interfaccia PROFIBUS.
6SL3244-0BB12-1FA0
6SL3244-0BB13-1FA0
Con interfaccia PROFINET.
•
Alimentazione dal Power Module
•
o esternamente tramite i morsetti 31 e 32 con tensione DC 24 V, massimo 200 VA
Utilizzare un'alimentazione con bassa tensione di protezione (PELV= Protective Extra Low
Voltage secondo EN 61800-5-1): l'alimentazione di tensione a 0 V deve essere collegata a
bassa resistenza con il conduttore di protezione PE dell'impianto.
Esempio: alimentatore SITOP Power 5 A.
La tensione di alimentazione è isolata galvanicamente dai morsetti di comando.
Corrente assorbita
max 0,5 A
Potenza dissipata
5,0 W
Tensioni di uscita
+24 V out (morsetto 9),18 V … 28,8 V, max. 100 mA
Più la potenza dissipata delle tensioni di uscita.
+10 V out (morsetti 1 e 35), 9,5 V … 10,5 V, max. 10 mA
Risoluzione del valore di
riferimento
0,01 Hz
Ingressi digitali
6 (DI 0 … DI 5)
•
Low < 5 V, high > 11 V
•
con separazione di potenziale
•
tensione di ingresso massima 30 V
•
corrente assorbita 5,5 mA
•
compatibilità con SIMATIC
•
commutabili PNP/NPN
•
tempo di reazione 10 ms con tempo di antirimbalzo
p0724 = 0.
Ingresso impulsi
1 (DI 3)
frequenza massima 32 kHz
Ingressi analogici
2 (AI 0, AI 1)
•
Ingresso differenziale
•
commutabile: 0 V … 10 V, 0 mA … 20 mA o -10 V … +10 V
•
risoluzione 12 bit
•
tempo di reazione 13 ms ± 1 ms
•
Se AI 0 è configurato come ingresso digitale aggiuntivo:
Low < 1,6 V, High > 4,0 V,
tempo di reazione 13 ms ± 1 ms con tempo di antirimbalzo
p0724 = 0.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
333
Dati tecnici
12.2 Dati tecnici, Control Unit CU240E-2
Caratteristica
Dati
Uscite digitali
3 (DO 0 … DO 2)
•
DO 0: uscita relè, 30 V DC / max. 0,5 A con carico ohmico
•
DO 1: uscita transistore, 30 V DC / max. 0,5 A con carico
ohmico, protezione contro inversione di polarità della
tensione.
•
DO 2: uscita relè, 30 V DC / max. 0,5 A con carico ohmico.
•
tempo di aggiornamento 2 ms
Per le applicazioni che richiedono una certificazione UL è necessario rispettare una tensione
riferita al potenziale di terra di 30 V DC sul DO 0 e fornire un'alimentazione elettrica di classe 2
dotata di messa a terra.
Uscite analogiche
Sensore di temperatura
2 (AO 0, AO 1)
PTC
KTY84
•
0 V … 10 V o 0 mA … 20 mA
•
potenziale di riferimento: "GND"
•
risoluzione 16 bit
•
tempo di aggiornamento 4 ms
•
sorveglianza cortocircuito 22 Ω
•
soglia di commutazione 1650 Ω
•
sorveglianza cortocircuito < 50 Ω
•
rottura conduttore > 2120 Ω
Interruttore termostatico con contatto senza potenziale.
Ingresso digitale fail-safe
1 (DI 4 e DI 5)
•
Se sono state abilitate le funzioni di base delle funzioni di
sicurezza, DI 4 e DI 5 costituiscono l'ingresso digitale failsafe.
•
Tensione di ingresso max. 30 V, 5,5 mA
•
Tempo di reazione:
–
Tipico: 5 ms + tempo di antirimbalzo p9651
–
Tipico, se il tempo di antirimbalzo = 0: 6 ms
–
Worst case: 15 ms + tempo di antirimbalzo
–
Worst case, se il tempo di antirimbalzo = 0: 16 ms
Per i dati delle funzioni estese delle funzioni di sicurezza consultare il Manuale di guida alle
funzioni Safety Integrated, vedere anche la sezione: Ulteriori informazioni sul convertitore
(Pagina 397).
PFH
5 × 10E-8
Interfaccia USB
Mini-B
Dimensioni (L x A x P)
73 mm × 199 mm × 39 mm
Peso
0,49 kg
Schede di memoria
MMC
Suggerimento: 6SL3254-0AM00-0AA0
SD
Suggerimento: 6ES7954-8LB00-0AA0
Non sono ammesse schede SDHC (SD High Capacity).
0 °C … 55 °C
Nel funzionamento senza Operator Panel inserito.
Temperatura di esercizio
Probabilità di guasto delle funzioni di sicurezza (Probability of
Failure per Hour)
Il dato relativo alla profondità è valido in caso di montaggio sul
Power Module.
Convertitori con le Control Unit CU240B-2 e CU240E-2
334
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.2 Dati tecnici, Control Unit CU240E-2
Caratteristica
Dati
0 °C … 53 °C
0 °C … 50 °C
Vale solo per Control Unit con interfaccia PROFINET senza
Operator Panel collegato, se sono soddisfatte le due condizioni
seguenti:
•
La Control Unit non rispetta alcuna distanza laterale da
un'altra Control Unit.
Questo è il caso ad es. quando sono presenti più Power
Module in Frame Size A montati molto vicini gli uni agli altri.
•
La tensione di ingresso del relativo Power Module è
maggiore di 480 V.
Nel funzionamento con Operator Panel inserito.
Rispettare le eventuali limitazioni della temperatura di esercizio dovute al Power Module.
Temperatura di
magazzinaggio
- 40 °C … 70 °C
Umidità relativa dell'aria
< 95 %
La condensa non è ammessa.
Nota
Cadute di tensione dell'alimentazione esterna 24 V se l'alimentazione 400 V è disinserita
Il convertitore reagisce alle cadute di tensione dell'alimentazione esterna 24 V (≤ 95 % e ≤
3 ms) con l'errore F30074 senza comunque interrompere la comunicazione con il bus di
campo.
È possibile confermare l'errore tramite DI2 (impostazione di fabbrica).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
335
Dati tecnici
12.3 Dati tecnici, Power Module
12.3
Dati tecnici, Power Module
Sovraccarico ammesso del convertitore
Per il Power Module i dati di potenza variano in funzione del carico previsto: "Low Overload"
(LO) e "High Overload" (HO).
Figura 12-1
Cicli di carico "High Overload" e "Low Overload"
Nota
Il carico di base (100 % della potenza o della corrente) di "Low Overload" è maggiore del
carico di base di "High Overload".
Per selezionare il convertitore in base ai cicli di carico si consiglia di utilizzare il software di
progettazione "SIZER". Vedere Ulteriori informazioni sul convertitore (Pagina 397).
Convertitori con le Control Unit CU240B-2 e CU240E-2
336
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
Definizioni
• Corrente di ingresso 100 % della corrente d'ingresso ammessa in un ciclo di carico
secondo Low Overload (corrente d'ingresso con carico base LO).
LO
• Corrente di uscita LO 100 % della corrente d'uscita ammessa in un ciclo di carico
secondo Low Overload (corrente d'uscita con carico base LO).
• Potenza LO
Potenza del convertitore alla corrente d'uscita LO.
• Corrente di ingresso 100 % della corrente d'ingresso ammessa in un ciclo di carico
secondo High Overload (corrente d'ingresso con carico base HO).
HO
• Corrente di uscita HO 100 % della corrente d'uscita ammessa in un ciclo di carico
secondo High Overload (corrente d'uscita con carico base HO).
• Potenza HO
Potenza del convertitore alla corrente d'uscita HO.
Quando per i dati di potenza sono indicati valori nominale senza ulteriore specificazione,
questi si riferiscono sempre ad una sovraccaricabilità per Low Overload.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
337
Dati tecnici
12.3 Dati tecnici, Power Module
12.3.1
Dati tecnici PM230 IP20
12.3.1.1
Dati generali, PM230, IP20
Proprietà
Esecuzione
Tensione di rete
3 AC 380 V … 480 V ± 10 %
Tensione di uscita
3 AC 0 V … Tensione di ingresso x 0,95 (max.)
Frequenza di ingresso
50 Hz … 60 Hz, ± 3 Hz
Frequenza di uscita
0 Hz … 650 Hz, a seconda del tipo di regolazione
Fattore di potenza λ
0.9
Impedenza di rete
Uk ≤ 1 %, nessuna bobina di rete ammessa
Corrente d'inserzione
Piccola corrente di ingresso
Frequenza impulsi
(impostazione di fabbrica)
4 kHz
La frequenza impulsi può essere modificata in intervalli di 2 kHz fino a 16 kHz (fino a 8 kHz
per 55 kW e 75 kW). Un aumento della frequenza impulsi determina una riduzione della
corrente di uscita.
Compatibilità
elettromagnetica
Gli apparecchi con filtro sono conformi a EN 61800-3: 2004, ovvero idonei alla classe
ambientale C2. Per i dettagli vedere il Manuale di installazione, appendice A2.
Metodi di frenatura
Frenatura in corrente continua
Grado di protezione
Apparecchi da incasso IP20
Apparecchi PT
IP20 con incasso in un armadio elettrico
IP54 con installazione sulla parete dell'armadio elettrico
Temperatura di esercizio
LO senza derating:
HO senza derating:
LO/HO con derating:
0°C … +40°C
0°C … +50°C
fino a 60 C
Temperatura di
magazzinaggio
-40 °C … +70 °C
Umidità relativa dell'aria
< 95 % - condensa non ammessa
Imbrattamento
Protetto con grado di imbrattamento 2 secondo EN 61800-5-1: 2007
Condizioni ambientali
Protetto in classe ambientale 3C2 secondo EN 60721-3-3 dai danni dovuti a sostanze
chimiche: 1995
Urti e vibrazioni
•
Magazzinaggio di lungo periodo nell'imballaggio di trasporto in classe 1M2 secondo
EN 60721-3-1: 1997
•
Trasporto nell'imballaggio di trasporto in classe 2M3 secondo EN 60721--3--2: 1997
•
Vibrazioni durante il funzionamento in classe 3M2 secondo EN 60721-3-3: 1995
fino a 1000 m s.l.m.
fino a 4000 m s.l.m.
Per i dettagli vedere il Manuale di
installazione.
Altitudine d'installazione
senza derating:
con derating:
Per i dettagli vedere il Manuale di
installazione
Corrente di cortocircuito
consentita
Frame Size D ... F: 65 kA 1)
Categoria di sovratensione
Circuiti di alimentazione:
Circuiti non di
alimentazione:
Norme
UL 1),2), CE, C-tick
L'azionamento soddisfa i requisiti UL solo con fusibili certificati UL.
Categoria di sovratensione III
Categoria di sovratensione II
1)
Per protezione con fusibile elencato di classe J o 3NE1, tensione nominale AC 600 V con corrente nominale del
convertitore specifico.
2)
UL in preparazione per Frame Sizes D … F
Convertitori con le Control Unit CU240B-2 e CU240E-2
338
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
12.3.1.2
Dati dipendenti dalla potenza, PM230, IP20
Nota
Nei Power Module PM230, IP20, i valori di sovraccarico bassi (LO) corrispondono ai valori
nominali.
Tabella 12- 3 PM230, IP20, Frame Sizes A, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3210…
6SL3210…
…1NE11-3UL0
…1NE11-3AL0
…1NE11-7UL0
…1NE11-7AL0
…1NE12-2UL0
…1NE12-2AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
0,37 kW
1,3 A
1,3 A
0,55 kW
1,8 A
1,7 A
0,75 kW
2,3 A
2,2 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
0,25 kW
0,9 A
0,9 A
0,37 kW
1,3 A
1,3 A
0,55 kW
1,8 A
1,7 A
3NE1 813-0
AJT2 / 3NE1 813-0
3NE1 813-0
AJT4 / 3NE1 813-0
3NE1 813-0
AJT4 / 3NE1 813-0
0,04 kW
0,04 kW
0,05 kW
1,5 l/s
1,5 l/s
4,5 l/s
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
1 … 2,5
18 … 14 AWG
1 … 2,5
18 … 14 AWG
1 … 2,5 mm2
18 … 14 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
1,4 kg
1,6 kg
1,4 kg
1,6 kg
1,4 kg
1,6 kg
…1NE13-1UL0
…1NE13-1AL0
…1NE14-1UL0
…1NE14-1AL0
…-1NE15-8UL0
…-1NE15-8AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
1,1 kW
3,2 A
3,1 A
1,5 kW
4,2 A
4,1 A
2,2 kW
6,1 A
5,9 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
0,75 kW
2,3 A
2,2 A
1,1 kW
3,2 A
3,1 A
1,5 kW
4,2 A
4,1 A
3NE1 813-0
AJT6 / 3NE1 813-0
3NE1 813-0
AJT6 / 3NE1 813-0
3NE1 813-0
AJT10 / 3NE1 813-0
0,06 kW
0,07 kW
0,08 kW
4,5 l/s
4,5 l/s
4,5 l/s
Peso senza filtro
Peso con filtro
mm2
mm2
Tabella 12- 4 PM230, IP20, Frame Sizes A, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3210…
6SL3210…
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
1 … 2,5
18 … 14 AWG
1 … 2,5
18 … 14 AWG
1,5 … 2,5 mm2
16 … 14 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
1,4 kg
1,6 kg
1,4 kg
1,6 kg
1,4 kg
1,6 kg
Peso senza filtro
Peso con filtro
mm2
mm2
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
339
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 5 PM230, IP20, Frame Sizes A, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3210…
6SL3210…
…1NE17-7UL0
…1NE17-7AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
3 kW
8,0 A
7,7 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
2,2 kW
6,1 A
5,9 A
Fusibile secondo IEC
Fusibile secondo UL
3NE1 813-0
AJT10 / 3NE1 813-0
Potenza dissipata
0,11 kW
Flusso di aria di raffreddamento necessario
4,5 l/s
Sezione del cavo di rete e del cavo motore
1,5 … 2,5 mm2
16 … 14 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0,5 Nm / 4 lbf in
Peso senza filtro
Peso con filtro
1,4 kg
1,6 kg
Tabella 12- 6 PM230, PT, Frame Sizes A, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3211…
6SL3211…
…1NE17-7UL0
…1NE17-7AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
3 kW
8,0 A
7,7 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
2,2 kW
6,1 A
5,9 A
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
3NE1 813-0
AJT10 / 3NE1 813-0
0,11 kW
Flusso di aria di raffreddamento necessario
4,5 l/s
Sezione del cavo di rete e del cavo motore
1,5 … 2,5 mm2
16 … 14 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0.5 Nm / 4 lbf in
Peso senza filtro
Peso con filtro
1,7 kg
1,9 kg
Convertitori con le Control Unit CU240B-2 e CU240E-2
340
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 7 PM230, IP20, Frame Sizes B, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3210…
6SL3210…
…1NE21-0UL0
…1NE21-0AL0
…1NE21-3UL0
…1NE21-3AL0
…1NE21-8UL0
…1NE21-8AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
4 kW
10,5 A
10,2 A
5,5 kW
13,6 A
13,2 A
7,5 kW
18,6 A
18 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
3 kW
8,0 A
7,7 A
4 kW
10,5 A
10,2 A
5,5 kW
13,6 A
13,2 A
3NE1 813-0
AJT15 / 3NE1 813-0
3NE1 814-0
AJT20 / 3NE1 814-0
3NE1 815-0
AJT25 / 3NE1 815-0
0,12 kW
0,15 kW
0,22 kW
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
9,2 l/s
9,2 l/s
9,2 l/s
Sezione del cavo di rete e del cavo motore
1,5 … 6 mm2
16 … 10 AWG
1,5 … 6 mm2
16 … 10 AWG
1,5 … 6 mm2
16 … 10 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0,6 Nm / 5 lbf in
0,6 Nm / 5 lbf in
0,6 Nm / 5 lbf in
2,8 kg
3 kg
2,8 kg
3 kg
2,8 kg
3 kg
Peso senza filtro
Peso con filtro
Tabella 12- 8 PM230, PT, Frame Sizes B, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3211…
6SL3211…
…1NE21-8UL0
…1NE21-8AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
7,5 kW
18,6 A
18 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
5,5 kW
13,6 A
13,2 A
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
3NE1 815-0
AJT25 / 3NE1 815-0
0,22 kW
Flusso di aria di raffreddamento necessario
9.2 l/s
Sezione del cavo di rete e del cavo motore
1,5 … 6 mm2
16 … 10 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0,6 Nm / 5 lbf in
Peso senza filtro
Peso con filtro
3,4 kg
3,6 kg
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
341
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 9 PM230, IP20, Frame Sizes C, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3210…
6SL3210…
…1NE22-6UL0
…1NE22-6AL0
…1NE23-2UL0
…1NE23-2AL0
…1NE23-8UL0
…1NE23-8AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
11 kW
26,9 A
26 A
15 kW
33,1 A
32 A
18,5 kW
39,2 A
38 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
7,5 kW
18,6 A
18 A
11 kW
26,9 A
26 A
15 kW
33,1 A
32 A
3NE1 803-0
AJT35 / 3NE1 803-0
3NE1 817-0
AJT45 / 3NE1 817-0
3NE1 817-0
AJT50 / 3NE1 817-0
0,3 kW
0,35 kW
0,45 kW
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
18,5 l/s
18,5 l/s
18,5 l/s
Sezione del cavo di rete e del cavo motore
6 …16 mm2
10 … 6 AWG
6 …16 mm2
10 … 6 AWG
6 …16 mm2
10 … 6 AWG
1,3 Nm / 12 lbf in
1,3 Nm / 12 lbf in
1,3 Nm / 12 lbf in
4,5 kg
5,1 kg
4,5 kg
5,1 kg
4,5 kg
5,1 kg
Coppia di serraggio del cavo di rete e del cavo
motore
Peso senza filtro
Peso con filtro
Tabella 12- 10
PM230, PT, Frame Sizes C, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3211…
6SL3211…
…1NE23-8UL0
…1NE23-8AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
18,5 kW
39,2 A
38 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
15 kW
33,1 A
32 A
Fusibile secondo IEC
Fusibile secondo UL
3NE1 817-0
AJT50 / 3NE1 817-0
Potenza dissipata
0,45 kW
Flusso di aria di raffreddamento necessario
18,5 l/s
Sezione del cavo di rete e del cavo motore
6 …16 mm2
10 … 6 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
Peso senza filtro
Peso con filtro
1,3 Nm / 12 lbf in
5,4 kg
6 kg
Convertitori con le Control Unit CU240B-2 e CU240E-2
342
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 11
PM230, IP20, Frame Sizes D, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3210…
6SL3210…
…1NE24-5UL0
…1NE24-5AL0
…1NE26-0UL0
…1NE26-0AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
22 kW
42 A
45 A
30 kW
56 A
60 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
18.5 kW
36 A
38 A
22 kW
42 A
45 A
3NE1818-0
3NE1818-0
3NE1820-0
3NE1820-0
0,52 kW
0,68 kW
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
80 l/s
80 l/s
Sezione del cavo di rete e del cavo motore
16 … 35 mm2
5 … 2 AWG
16 … 35 mm2
5 … 2 AWG
6 Nm / 53 lbf in
6 Nm / 53 lbf in
11 kg
14 kg
11 kg
14 kg
Coppia di serraggio del cavo di rete e del cavo
motore
Peso senza filtro
Peso con filtro
Tabella 12- 12
PM230, IP20, Frame Sizes E, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3210…
6SL3210…
…1NE27-5UL0
…1NE27-5AL0
…1NE28-8UL0
…1NE28-8AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
37 kW
70 A
75 A
45 kW
84 A
90 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
30 kW
56 A
60 A
37 kW
70 A
75 A
3NE1021-0
3NE1021-0
3NE1022-0
3NE1022-0
0,99 kW
1,2 kW
80 l/s
80 l/s
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
mm2
25 … 50
3 … 1-1/0 AWG
25 … 50 mm2
3 … 1-1/0 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
6 Nm / 53 lbf in
6 Nm / 53 lbf in
15 kg
22 kg
15 kg
22 kg
Peso senza filtro
Peso con filtro
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
343
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 13
PM230, IP20, Frame Sizes F, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3210…
6SL3210…
…1NE31-1UL0
…1NE31-1AL0
…1NE31-5UL0
…1NE31-5AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
55 kW
102 A
110 A
75 kW
135 A
145 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
45 kW
84 A
90 A
55 kW
102 A
110 A
3NE1224-0
3NE1224-0
3NE1225-0
3NE1225-0
1,4 kW
1,9 kW
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
150 l/s
150 l/s
Sezione del cavo di rete e del cavo motore
35 … 120 mm2
2 … 4/0 AWG
35 … 120 mm2
2 … 4/0 AWG
13 Nm / 115 lbf in
13 Nm / 115 lbf in
33 kg
48 kg
33 kg
48 kg
Coppia di serraggio del cavo di rete e del cavo
motore
Peso senza filtro
Peso con filtro
Convertitori con le Control Unit CU240B-2 e CU240E-2
344
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
12.3.2
Dati tecnici PM240
12.3.2.1
Dati generali, PM240
Proprietà
Esecuzione
Tensione di rete
3 AC 380 V … 480 V ± 10 %
Tensione di uscita
3 AC 0 V … Tensione di ingresso x 0,95 (max.)
Frequenza di ingresso
50 Hz … 60 Hz, ± 3 Hz
Frequenza di uscita
0 Hz … 650 Hz, a seconda del tipo di regolazione
Fattore di potenza λ
0,7 ... 0,85
Corrente d'inserzione
minore della corrente d'ingresso
Frequenza impulsi
(impostazione di fabbrica)
4 kHz per 0,37 kW ... 90 kW
2 kHz per 110 kW ... 250 kW
La frequenza impulsi può essere modificata in intervalli di 2 kHz. Un aumento della
frequenza impulsi determina una riduzione della corrente di uscita.
Compatibilità
elettromagnetica
Gli apparecchi sono conformi a EN 61800-3: 2004, ovvero idonei alle classi ambientali C1 e
C2. Per i dettagli, vedere il Manuale di installazione, appendice A2
Metodi di frenatura
Frenatura in corrente continua, frenatura compound, resistenza di frenatura con chopper di
frenatura integrato
Grado di protezione
Apparecchi da incasso IP20
Temperatura di esercizio
LO senza derating:
HO senza derating:
HO senza derating:
LO/HO con derating:
Temperatura di
magazzinaggio
-40 °C … +70 °C
Imbrattamento
Protetto con grado di imbrattamento 2 secondo EN 61800-5-1: 2007
Umidità relativa dell'aria
< 95 % - condensa non ammessa
Condizioni ambientali
Protetto in classe ambientale 3C2 secondo EN 60721-3-3 dai danni dovuti a sostanze
chimiche: 1995
Urti e vibrazioni
•
Magazzinaggio di lungo periodo nell'imballaggio di trasporto in classe 1M2 secondo
EN 60721-3-1: 1997
•
Trasporto nell'imballaggio di trasporto in classe 2M3 secondo EN 60721--3--2: 1997
•
Vibrazioni durante il funzionamento in classe 3M2 secondo EN 60721-3-3: 1995
Altitudine d'installazione
senza derating:
con derating:
Norme
tutte le potenze
0,37 ... 110 kW
132 … 200 kW
tutte le potenze
0,37 kW ... 132 kW
160 kW ... 250 kW
tutte le potenze
0 C … +40 C
0 C … +50 C
0 C … +40 C
fino a 60°C
fino a 1000 m s.l.m.
fino a 2000 m s.l.m.
fino a 4000 m s.l.m.
Per i dettagli vedere
il Manuale di
installazione.
Per i dettagli vedere
il Manuale di
installazione
UL, cUL, CE, C-tick, SEMI F47
L'azionamento soddisfa i requisiti UL solo con fusibili certificati UL.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
345
Dati tecnici
12.3 Dati tecnici, Power Module
12.3.2.2
Dati dipendenti dalla potenza PM240
Nota
I valori di corrente di ingresso specificati valgono per il funzionamento senza bobina di rete
per una rete a 400 V con Uk = 1 %, riferita alla potenza nominale del convertitore. Le
correnti si riducono di alcuni punti percentuali se si utilizza una bobina di rete.
Tabella 12- 14
PM240, IP20, Frame Sizes A, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
6SL3224-…
…0BE13-7UA0
…0BE15-5UA0
…0BE17-5UA0
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
0,37 kW
1,6 A
1,3 A
0,55 kW
2,0 A
1,7 A
0,75 kW
2,5 A
2,2 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
0,37 kW
1,6 A
1,3 A
0,55 kW
2,0 A
1,7 A
0,75 kW
2,5 A
2,2 A
10 A, classe J
10 A, classe J
10 A, classe J
0,097 kW
0,099 kW
0,102 kW
4,8 l/s
4,8 l/s
4,8 l/s
Fusibile
Potenza dissipata
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
1 … 2.5
18 … 14 AWG
1 … 2.5
18 … 14 AWG
1 … 2.5 mm2
18 … 14 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
1,2 kg
1,2 kg
1,2 kg
Peso
Tabella 12- 15
mm2
mm2
PM240, IP20, Frame Sizes A, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
6SL3224-…
…0BE21-1UA0
…0BE21-5UA0
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
1,1 kW
3,9 A
3,1 A
1,5 kW
4,9 A
4,1 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
1,1 kW
3,8 A
3,1 A
1,5 kW
4,8 A
4,1 A
10 A, classe J
10 A, classe J
0,108 kW
0,114 kW
4,8 l/s
4,8 l/s
Fusibile
Potenza dissipata
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
1 … 2.5
18 … 14 AWG
1 … 2.5 mm2
18 … 14 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
1,1 kg
1,1 kg
Peso
mm2
Convertitori con le Control Unit CU240B-2 e CU240E-2
346
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 16
PM240, IP20, Frame Sizes B, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3224-…
6SL3224-…
…0BE22-2UA0
…0BE22-2AA0
…0BE23-0UA0
…0BE23-0AA0
…0BE24-0UA0
…0BE24-0AA0
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
2,2 kW
7,6 A
5,9 A
3 kW
10,2 A
7,7 A
4 kW
13,4 A
10,2 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
2,2 kW
7,6 A
5,9 A
3 kW
10,2 A
7,7 A
4 kW
13,4 A
10,2 A
16 A, classe J
16 A, classe J
20 A, classe J
0,139 kW
0,158 kW
0,183 kW
24 l/s
24 l/s
24 l/s
Fusibile
Potenza dissipata
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
1.5 … 6
16 … 10 AWG
1.5 … 6
16 … 10 AWG
1.5 … 6 mm2
16 … 10 AWG
1,5 Nm / 13 lbf in
1,5 Nm / 13 lbf in
1,5 Nm / 13 lbf in
4,3 kg
4,3 kg
4,3 kg
…0BE25-5UA0
…0BE25-5AA0
…0BE27-5UA0
…0BE27-5AA0
…0BE31-1UA0
…0BE31-1AA0
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
7,5 kW
21,9 A
18 A
11 kW
31,5 A
25 A
15 kW
39,4 A
32 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
5,5 kW
16,7 A
13,2 A
7,5 kW
23,7 A
19 A
11 kW
32,7 A
26 A
20 A, classe J
32 A, classe J
35 A, classe J
0,240 kW
0,297 kW
0,396 kW
Coppia di serraggio del cavo di rete e del cavo
motore
Peso
Tabella 12- 17
mm2
mm2
PM240, IP20, Frame Sizes C, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3224-…
6SL3224-…
Fusibile
Potenza dissipata
Flusso di aria di raffreddamento necessario
55 l/s
55 l/s
55 l/s
Sezione del cavo di rete e del cavo motore
4 … 10 mm2
12 … 8 AWG
4 … 10 mm2
12 … 8 AWG
4 … 10 mm2
12 … 8 AWG
2,3 Nm / 20 lbf in
2,3 Nm / 20 lbf in
2,3 Nm / 20 lbf in
6,5 kg
7 kg
6,5 kg
7 kg
6,5 kg
7 kg
Coppia di serraggio del cavo di rete e del cavo
motore
Peso senza filtro
Peso con filtro
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
347
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 18
PM240, IP20, Frame Sizes D, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3224-…
6SL3224-…
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
Coppia di serraggio del cavo di rete e del cavo
motore
Peso senza filtro
Peso con filtro
Tabella 12- 19
…0BE31-5UA0
…0BE31-5AA0
…0BE31-8UA0
…0BE31-8AA0
…0BE32-2UA0
…0BE32-2AA0
18.5 kW
46 A
38 A
22 kW
53 A
45 A
30 kW
72 A
60 A
15 kW
40 A
32 A
18,5 kW
46 A
38 A
22 kW
56 A
45 A
3NA3820
50 A, classe J
3NA3822
63 A, classe J
3NA3824
80 A, classe J
0.44 kW
0,42 kW
0,55 kW
0,52 kW
0.72 kW
0,69 kW
22 l/s
22 l/s
39 l/s
mm2
10 … 35
7 … 2 AWG
mm2
10 … 35
7 … 2 AWG
16 … 35 mm2
5 … 2 AWG
6 Nm / 53 lbf in
6 Nm / 53 lbf in
6 Nm / 53 lbf in
13 kg
16 kg
13 kg
16 kg
13 kg
16 kg
PM240, IP20, Frame Sizes E, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3224-…
6SL3224-…
…0BE33-0UA0
…0BE33-0AA0
…0BE33-7UA0
…0BE33-7AA0
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
37 kW
88 A
75 A
45 kW
105 A
90 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
30 kW
73 A
60 A
37 kW
90 A
75 A
3NA3830
100 A, classe J
3NA3832
125 A, classe J
0.99 kW
1,04 kW
1.2 kW
1,2 kW
Flusso di aria di raffreddamento necessario
22 l/s
39 l/s
Sezione del cavo di rete e del cavo motore
25 … 35 mm2
3 … 2 AWG
25 … 35 mm2
3 … 2 AWG
6 Nm / 53 lbf in
6 Nm / 53 lbf in
16 kg
23 kg
16 kg
23 kg
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata senza filtro
Potenza dissipata con filtro
Coppia di serraggio del cavo di rete e del cavo
motore
Peso senza filtro
Peso con filtro
Convertitori con le Control Unit CU240B-2 e CU240E-2
348
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 20
PM240, IP20, Frame Sizes F, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3224-…
6SL3224-…
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata senza filtro
Potenza dissipata con filtro
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
Coppia di serraggio del cavo di rete e del cavo
motore
Peso senza filtro
Peso con filtro
Tabella 12- 21
…0BE34-5UA0
…0BE34-5AA0
…0BE35-5UA0
…0BE35-5AA0
…0BE37-5UA0
…0BE37-5AA0
55 kW
129 A
110 A A
75 kW
168 A
145 A
90 kW
204 A
178 A
45 kW
108 A
90 A
55 kW
132 A
110 A
75 kW
169 A
145 A
3NA3832
160 A, classe J
3NA3140
200 A, classe J
3NA3144
250 A, classe J
1.4 kW
1,5 kW
1.9 kW
2,0 kW
2.3 kW
2,4 kW
94 l/s
94 l/s
117 l/s
mm2
mm2
35 … 120
2 … 4/0 AWG
70 … 120
2/0 … 4/0 AWG
95 … 120 mm2
3/0 … 4/0 AWG
13 Nm / 115 lbf in
13 Nm / 115 lbf in
13 Nm / 115 lbf in
36 kg
52 kg
36 kg
52 kg
36 kg
52 kg
PM240, IP20, Frame Sizes F, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
6SL3224-…
…0BE38-8UA0
…0BE41-1UA0
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
110 kW
234 A
205 A
132 kW
284 A
250 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
90 kW
205 A
178 A
110 kW
235 A
205 A
--250 A, classe J
--315 A, classe J
2,4 kW
2,5 kW
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
117 l/s
117 l/s
Sezione del cavo di rete e del cavo motore
95 … 120 mm2
3/0 … 4/0 AWG
95 … 120 mm2
3/0 … 4/0 AWG
13 Nm / 115 lbf in
13 Nm / 115 lbf in
39 kg
39 kg
Coppia di serraggio del cavo di rete e del cavo
motore
Peso,
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
349
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 22
PM240 Frame Sizes GX, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
6SL3224-…
…0XE41-3UA0
…0XE41-6UA0
…0XE42-0UA0
Valori con carico nominale/sovraccarico ridotto
Potenza nominale LO
Corrente di ingresso nominale LO
Corrente di uscita nominale LO
160 kW
297 A
302 A
200 kW
354 A
370 A
240 kW
442 A
477 A
Valori con sovraccarico elevato
Potenza HO
Corrente di ingresso HO
Corrente di uscita HO
132 kW
245 A
250 A
160 kW
297 A
302 A
200 kW
354 A
370 A
3NA3254
355 A, classe J
3NA3260
400 A, classe J
3NA3372
630 A, classe J
Potenza dissipata,
3,9 kW
4,4 kW
5,5 kW
Flusso di aria di raffreddamento necessario
360 l/s
Fusibile secondo IEC
Fusibile secondo UL
Sezione del cavo di rete e del cavo motore
Coppia di serraggio del cavo di rete e del cavo
motore
Peso,
360 l/s
mm2
360 l/s
mm2
95 ... 2 x 240
3/0 … 2 x 600 AWG
120 ... 2 x 240
4/0 … 2 x 600 AWG
185 ... 2 x 240 mm2
6/0 … 2 x 600 AWG
14 Nm / 120 lbf in
14 Nm / 120 lbf in
14 Nm / 120 lbf in
176 kg
176 kg
176 kg
Convertitori con le Control Unit CU240B-2 e CU240E-2
350
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
12.3.3
Dati tecnici PM240-2
12.3.3.1
Dati generali, PM240-2
Proprietà
Esecuzione
Tensione di rete
3 AC 380 V … 480 V ± 10 %
Tensione di uscita
3 AC 0 V … Tensione di ingresso x 0,95 (max.)
Frequenza di ingresso
50 … 60 Hz, ± 3 Hz
Frequenza di uscita
0 … 650 Hz, a seconda del tipo di regolazione
Fattore di potenza λ
0,7 senza bobina di rete; 0,85 con bobina di rete
Impedenza di rete
Uk ≥ 1 %, con valori inferiori è richiesta una bobina di rete
Corrente d'inserzione
Piccola corrente di ingresso
Frequenza impulsi
(impostazione di fabbrica)
4 kHz
La frequenza impulsi può essere modificata in intervalli di 2 kHz. Un aumento della
frequenza impulsi determina una riduzione della corrente di uscita.
Compatibilità
elettromagnetica
Gli apparecchi con filtro sono conformi a EN 61800-3: 2004, ovvero idonei alla classe
ambientale C2. Per i dettagli vedere il Manuale di installazione, appendice A2.
Metodi di frenatura
Frenatura in corrente continua, frenatura compound, resistenza di frenatura con chopper di
frenatura integrato
Grado di protezione
Apparecchi da incasso
IP20
Apparecchi PT
IP20 con incasso in un armadio elettrico
IP54 con installazione sulla parete dell'armadio elettrico
Temperatura di esercizio
LO senza derating:
HO senza derating:
LO/HO con derating:
0°C … +40°C
0°C … +50°C
fino a 60 C
Temperatura di
magazzinaggio
-40 °C … +70 °C (-40 °F … 158 °F)
Umidità relativa dell'aria
< 95 % - condensa non ammessa
Imbrattamento
Protetto con grado di imbrattamento 2 secondo EN 61800-5-1: 2007
Condizioni ambientali
Protetto in classe ambientale 3C2 secondo EN 60721-3-3 dai danni dovuti a sostanze
chimiche: 1995
Urti e vibrazioni
•
Magazzinaggio di lungo periodo nell'imballaggio di trasporto in classe 1M2 secondo
EN 60721-3-1: 1997
•
Trasporto nell'imballaggio di trasporto in classe 2M3 secondo EN 60721--3--2: 1997
•
Vibrazioni durante il funzionamento in classe 3M2 secondo EN 60721-3-3: 1995
fino a 1000 m s.l.m.
fino a 4000 m s.l.m.
Per i dettagli vedere il Manuale di
installazione.
Altitudine d'installazione
senza derating:
con derating:
Per i dettagli vedere il Manuale di
installazione
Norme
UL, cUL, CE, C-tick, SEMI F47
L'azionamento soddisfa i requisiti UL solo con fusibili certificati UL.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
351
Dati tecnici
12.3 Dati tecnici, Power Module
12.3.3.2
Dati dipendenti dalla potenza PM240-2
Tabella 12- 23
PM240-2, IP20, Frame Sizes A, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3210…
6SL3210…
…1PE11-8UL0
…1PE11-8AL0
…1PE12-3UL0
…1PE12-3AL0
…1PE13-2UL0
…1PE13-2AL0
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
0,55 kW
2,3 A
1,7 A
0,75 kW
2,9 A
2,2 A
1,1 kW
4,1 A
3,1 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
0,37 kW
2A
1,3 A
0,55 kW
2,6 A
1,7 A
0,75 kW
3,3 A
2,2 A
3NA3 801 (6 A)
10 A classe J
3NA3 801 (6 A)
10 A classe J
3NA3 801 (6 A)
10 A classe J
0,04 kW
0,04 kW
0,04 kW
0,04 kW
0,04 kW
0,04 kW
5 l/s
5 l/s
5 l/s
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata senza filtro
Potenza dissipata con filtro
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
1 … 2,5
18 … 14 AWG
1 … 2,5
18 … 14 AWG
1 … 2,5 mm2
18 … 14 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
1,4 kg
1,5 kg
1,4 kg
1,5 kg
1,4 kg
1,5 kg
…1PE14-3UL0
…1PE14-3AL0
…1PE16-1UL0
…1PE16-1AL0
…1PE18-0UL0
---
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
1,5 kW
5,5 A
4,1 A
2,2 kW
7,7 A
5,9 A
3 kW
10,1 A
7,7 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
1,1 kW
4,7 A
3,1 A
1,5 kW
6,1 A
4,1 A
2,2 kW
8,8 A
5,9 A
3NA3 803 (10 A)
10 A classe J
3NA3 803 (10 A)
10 A classe J
3NA3 805 (16 A)
15 A classe J
0,07 kW
0,07 kW
0,1 kW
0,1 kW
0,12 kW
0,12 kW
5 l/s
5 l/s
5 l/s
Peso senza filtro
Peso con filtro
Tabella 12- 24
mm2
mm2
PM240-2, IP20, Frame Sizes A, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3210…
6SL3210…
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata senza filtro
Potenza dissipata con filtro
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
1 … 2,5
18 … 14 AWG
1,5 … 2,5
16 … 14 AWG
1,5 … 2,5 mm2
16 … 14 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
1,4 kg
1,5 kg
1,4 kg
1,5 kg
1,4 kg
---
Peso senza filtro
Peso con filtro
mm2
mm2
Convertitori con le Control Unit CU240B-2 e CU240E-2
352
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 25
PM240-2, PT, Frame Sizes A, 3 AC 380 V … 480 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3211…
6SL3211…
--…1PE16-1AL0
…1PE18-0UL0
__
Potenza LO
Corrente d'ingresso LO
Corrente di uscita LO
2,2 kW
7,7 A
5,9 A
3 kW
10,1 A
7,7 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
1,5 kW
6,1 A
4,1 A
2,2 kW
8,8 A
5,9 A
3NA3 803 (10 A)
10 A classe J
3NA3 805 (16 A)
15 A classe J
0,1 kW 1)
0,1 kW 1)
0.,12 kW 2)
0,12 kW 2)
7 l/s
7 l/s
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata senza filtro
Potenza dissipata con filtro
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
mm2
1,5 … 2,5
16 … 14 AWG
1,5 … 2,5 mm2
16 … 14 AWG
Coppia di serraggio del cavo di rete e del cavo
motore
0,5 Nm / 4 lbf in
0,5 Nm / 4 lbf in
--1,8 kg
1,7 kg
---
Peso senza filtro
Peso con filtro
1) 0,08 kW tramite radiatore;
2) 0,1 kW tramite radiatore
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
353
Dati tecnici
12.3 Dati tecnici, Power Module
12.3.4
Dati tecnici PM250
Proprietà
Esecuzione
Tensione di rete
3 AC 380 V … 480 V ± 10 %
Tensione di uscita
3 AC 0 V … Tensione di ingresso x 0,87 (max.)
Frequenza di ingresso
47 Hz … 63 Hz
Fattore di potenza λ
0.9
Corrente d'inserzione
Piccola corrente di ingresso
Frequenza impulsi
(impostazione di fabbrica)
4 kHz
La frequenza impulsi può essere modificata in intervalli di 2 kHz fino a 16 kHz. Un aumento
della frequenza impulsi determina una riduzione della corrente di uscita.
Compatibilità
elettromagnetica
Gli apparecchi sono conformi a EN 61800-3: 2004, ovvero idonei alle classi ambientali C1 e
C2. Per i dettagli, vedere il Manuale di installazione, appendice A2
Metodi di frenatura
Frenatura in corrente continua, recupero energia (fino al 100 % della potenza d'uscita)
Grado di protezione
Apparecchi da incasso IP20
Temperatura di esercizio
LO senza derating:
HO senza derating:
LO/HO con derating:
Temperatura di
magazzinaggio
-40 °C … +70 °C
Umidità relativa dell'aria
< 95 % - condensa non ammessa
Imbrattamento
Protetto con grado di imbrattamento 2 secondo EN 61800-5-1: 2007
Condizioni ambientali
Protetto in classe ambientale 3C2 secondo EN 60721-3-3 dai danni dovuti a sostanze
chimiche: 1995
Urti e vibrazioni
•
Magazzinaggio di lungo periodo nell'imballaggio di trasporto in classe 1M2 secondo
EN 60721-3-1: 1997
•
Trasporto nell'imballaggio di trasporto in classe 2M3 secondo EN 60721--3--2: 1997
•
Vibrazioni durante il funzionamento in classe 3M2 secondo EN 60721-3-3: 1995
0°C … +40°C
0°C … +50°C
fino a 60 C
Per i dettagli vedere il Manuale di
installazione.
Altitudine d'installazione
senza derating:
con derating:
fino a 1000 m s.l.m.
fino a 4000 m s.l.m.
Per i dettagli vedere il
Manuale di installazione
Norme
UL, CE, CE, SEMI F47
L'azionamento soddisfa i requisiti UL solo con fusibili certificati UL.
Convertitori con le Control Unit CU240B-2 e CU240E-2
354
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
12.3.4.1
Dati dipendenti dalla potenza PM250
Tabella 12- 26
PM250, IP20, Frame Sizes C, 3 AC 380 V … 480 V
N. di ordinazione - con filtro
6SL3225-…
0BE25-5AA0
0BE27-5AA0
0BE31-1AA0
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
7,5 kW
18 A
18 A
11 kW
25 A
25 A
15 kW
32 A
32 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
5. 5 kW
13,2 A
13,2 A
7,5 kW
19 A
19 A
11 kW
26 A
26 A
20 A, classe J
32 A, classe J
35 A, classe J
0,24 kW
0,30 kW
0,31 kW
Fusibile
Potenza dissipata
Flusso di aria di raffreddamento necessario
38 l/s
38 l/s
38 l/s
Sezione del cavo di rete e del cavo motore
2,5 … 10 mm2
14 … 8 AWG
4,0 … 10 mm2
12 … 8 AWG
4,0 … 10 mm2
12 … 8 AWG
2,3 Nm / 20 lbf in
2,3 Nm / 20 lbf in
2,3 Nm / 20 lbf in
7,5 kg
7,5 kg
7,5 kg
0BE31-5AA0
0BE31-8AA0
0BE32-2AA0
18.5 kW
36 A
38 A
22 kW
42 A
45 A
30 kW
56 A
60 A
15 kW
30 A
32 A
18.5 kW
36 A
38 A
22 kW
42 A
45 A
3NA3820
50 A, classe J
3NA3822
63 A, classe J
3NA3824
80 A, classe J
0,44 kW
0,55 kW
0,72 kW
22 l/s
22 l/s
39 l/s
Coppia di serraggio del cavo di rete e del cavo
motore
Peso
Tabella 12- 27
PM250, IP20, Frame Sizes D, 3 AC 380 V … 480 V
N. di ordinazione - con filtro
6SL3225-…
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
Coppia di serraggio del cavo di rete e del cavo
motore
Peso
mm2
10 … 35
7 … 2 AWG
mm2
10 … 35
7 … 2 AWG
16 … 35 mm2
6 … 2 AWG
6 Nm / 53 lbf in
6 Nm / 53 lbf in
6 Nm / 53 lbf in
15 kg
15 kg
16 kg
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
355
Dati tecnici
12.3 Dati tecnici, Power Module
Tabella 12- 28
PM250, IP20, Frame Sizes E, 3 AC 380 V … 480 V
N. di ordinazione - con filtro
6SL3225-…
0BE33-0AA0
0BE33-7AA0
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
37 kW
70 A
75 A
45 kW
84 A
90 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
30 kW
56 A
60 A
37 kW
70 A
75 A
3NA3830
100 A, classe J
3NA3832
125 A, classe J
1,04 kW
1,2 kW
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
22 l/s
39 l/s
Sezione del cavo di rete e del cavo motore
25 … 35 mm2
3 … 2 AWG
25 … 35 mm2
3 … 2 AWG
6 Nm / 53 lbf in
6 Nm / 53 lbf in
21 kg
21 kg
Coppia di serraggio del cavo di rete e del cavo
motore
Peso
Tabella 12- 29
PM250, IP20, Frame Sizes F, 3 AC 380 V … 480 V
N. di ordinazione - con
filtro
6SL3225-…
0BE34-5AA0
0BE35-5AA0
0BE37-5AA0
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
55 kW
102 A
110 A
75 kW
135 A
145 A
90 kW
166 A
178 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
45 kW
84 A
90 A
55 kW
102 A
110 A
75 kW
135 A
145 A
3NA3836
160 A, classe J
3NA3140
200 A, classe J
3NA3144
250 A, classe J
1,5 kW
2,0 kW
2,4 kW
94 l/s
94 l/s
117 l/s
Fusibile secondo IEC
Fusibile secondo UL
Potenza dissipata
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
Coppia di serraggio del cavo di rete e del cavo
motore
Peso
mm2
mm2
35 … 120
2 … 4/0 AWG
35 … 120
2 … 4/0 AWG
35 … 120 mm2
2 … 4/0 AWG
13 Nm / 115 lbf in
13 Nm / 115 lbf in
13 Nm / 115 lbf in
51 kg
51 kg
51 kg
Convertitori con le Control Unit CU240B-2 e CU240E-2
356
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Dati tecnici
12.3 Dati tecnici, Power Module
12.3.5
Dati tecnici PM260
Proprietà
Tensione di rete
Esecuzione
3 AC 660 V … 690 V ± 10 %
Le parti di potenza possono funzionare anche con una tensione minima di 500 V –10 %. Ne
consegue una riduzione della potenza in modo lineare.
Frequenza di ingresso
50 Hz … 60 Hz, ± 3 Hz
Fattore di potenza λ
0.9
Corrente d'inserzione
Piccola corrente di ingresso
Frequenza impulsi
16 kHz
Compatibilità
elettromagnetica
Gli apparecchi sono conformi a EN 61800-3: 2004, ovvero idonei alle classi ambientali C1 e
C2. Per i dettagli, vedere il Manuale di installazione, appendice A2
Metodi di frenatura
Frenatura in corrente continua, recupero energia (fino al 100 % della potenza d'uscita)
Grado di protezione
Apparecchi da incasso IP20
Temperatura di esercizio
LO senza derating:
HO senza derating:
LO/HO con derating:
Temperatura di
magazzinaggio
-40 °C … +70 °C (-40 °F … 158 °F)
Umidità relativa dell'aria
< 95% - condensa non ammessa
Imbrattamento
Protetto con grado di imbrattamento 2 secondo EN 61800-5-1: 2007
Condizioni ambientali
Protetto in classe ambientale 3C2 secondo EN 60721-3-3 dai danni dovuti a sostanze
chimiche: 1995
Urti e vibrazioni
•
Magazzinaggio di lungo periodo nell'imballaggio di trasporto in classe 1M2 secondo
EN 60721-3-1: 1997
•
Trasporto nell'imballaggio di trasporto in classe 2M3 secondo EN 60721--3--2: 1997
•
Vibrazioni durante il funzionamento in classe 3M2 secondo EN 60721-3-3: 1995
Altitudine d'installazione
senza derating:
con derating:
Norme
CE, C-TICK
0°C … +40°C
0°C … +50°C
fino a 60 C
fino a 1000 m s.l.m.
fino a 4000 m s.l.m.
Per i dettagli vedere il Manuale di
installazione.
Per i dettagli vedere il Manuale di
installazione
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
357
Dati tecnici
12.3 Dati tecnici, Power Module
12.3.5.1
Dati dipendenti dalla potenza PM260
Tabella 12- 30
PM260, IP20, Frame Sizes D - 3 AC 660 V … 690 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3225-…
6SL3225-…
0BH27-5UA1
0BH27-5AA1
0BH31-1UA1
0BH31-1AA1
0BH31-5UA1
0BH31-5AA1
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
11 kW
13 A
14 A
15 kW
18 A
19 A
18,5 kW
22 A
23 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
7,5 kW
10 A
10 A
11 kW
13 A
14 A
15 kW
18 A
19 A
20 A
20 A
32 A
22 l/s
39 l/s
Fusibile
Potenza dissipata senza filtro
Potenza dissipata con filtro
Flusso di aria di raffreddamento necessario
Sezione del cavo di rete e del cavo motore
22 l/s
2,5 … 16
14 … 6 AWG
4 … 16
12 … 6 AWG
6 … 16 mm2
10 … 6 AWG
1,5 Nm / 53 lbf in
1,5 Nm / 53 lbf in
1,5 Nm / 53 lbf in
22 kg
23 kg
22 kg
23 kg
22 kg
23 kg
< 64 dB(A)
< 64 dB(A)
< 64 dB(A)
0BH32-2UA1
0BH32-2AA1
0BH33-0UA1
0BH33-0AA1
0BH33-7UA1
0BH33-7AA1
Potenza nominale/LO
Corrente nominale/d'ingresso LO
Corrente nominale/di uscita LO
30 kW
34 A
35 A
37 kW
41 A
42 A
55 kW
60 A
62 A
Potenza HO
Corrente d'ingresso HO
Corrente di uscita HO
22 kW
26 A
26 A
30 kW
34 A
35 A
37 kW
41 A
42 A
50 A
50 A
80 A
Flusso di aria di raffreddamento necessario
94 l/s
94 l/s
117 l/s
Sezione del cavo di rete e del cavo motore
10 … 35 mm2
8 … 2 AWG
16 … 35 mm2
6 … 2 AWG
25 … 35 mm2
4 … 2 AWG
6 Nm / 53 lbf in
6 Nm / 53 lbf in
6 Nm / 53 lbf in
56 kg
58 kg
56 kg
58 kg
56 kg
58 kg
< 70 dB(A)
< 70 dB(A)
< 70 dB(A)
Coppia di serraggio del cavo di rete e del cavo
motore
Peso senza filtro
Peso con filtro
Livello di pressione acustica
Tabella 12- 31
mm2
mm2
PM260, IP20, Frame Sizes F - 3 AC 660 V … 690 V
N. di ordinazione - senza filtro
N. di ordinazione - con filtro
6SL3225-…
6SL3225-…
Fusibile
Potenza dissipata senza filtro
Potenza dissipata con filtro
Coppia di serraggio del cavo di rete e del cavo
motore
Peso senza filtro
Peso con filtro
Livello di pressione acustica
Convertitori con le Control Unit CU240B-2 e CU240E-2
358
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
A
Appendice
A.1
Funzioni nuove e ampliate
A.1.1
Versione firmware 4.5
Tabella A- 1 Nuove funzioni e modifiche delle funzioni nel firmware 4.5
Funzione
SINAMICS
G120
1
2
Supporto dei nuovi Power Module:
•
PM230 IP20 FSA … FSF
•
PM230 in tecnica passante FSA … FSC
Supporto dei nuovi Power Module:
•
PM240-2 IP20 FSA
•
PM240-2 in tecnica passante FSA
G120D
-
✓
✓
✓
-
-
-
✓
✓
✓
-
-
3
Nuove Control Unit con supporto PROFINET
✓
✓
-
✓
✓
✓
4
Supporto del profilo PROFIenergy
✓
✓
-
✓
✓
✓
5
Supporto di Shared Device via PROFINET
✓
✓
-
✓
✓
✓
6
Protezione in scrittura
✓
✓
✓
✓
✓
✓
7
Protezione know-how
✓
✓
✓
✓
✓
✓
8
Integrazione di un secondo set di dati di comando (CDS0 → CDS0 … CDS1)
✓
-
-
-
-
-
(Tutti gli altri convertitori dispongono di quattro set di dati di comando)
9
-
-
-
-
-
✓
10 Supporto di un encoder HTL
Regolazione di posizione e posizionatore semplice
-
-
-
-
✓
✓
11 Supporto di un encoder SSI
-
-
-
-
-
✓
12 Uscita digitale fail-safe
-
-
-
-
✓
✓
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
359
Appendice
A.1 Funzioni nuove e ampliate
A.1.2
Versione firmware 4.6
Tabella A- 2 Nuove funzioni e modifiche delle funzioni nel firmware 4.6
Funzione
SINAMICS
G120
1
2
Supporto dei nuovi Power Module
•
PM240-2 IP20 FSB … FSC
•
PM240-2 in tecnica passante FSB … FSC
Supporto dei nuovi Power Module
•
3
4
5
✓
✓
✓
✓
-
-
-
✓
✓
✓
✓
-
-
-
✓
✓
✓
✓
✓
✓
✓
✓
✓
✓
-
-
✓
✓
-
-
-
✓
-
-
-
-
-
-
CAN Velocity, ProfilTorque, canale SDO per ogni asse, test di
sistema con CodeSys, soppressione dell'avviso ErrorPassiv
Estensione della comunicazione tramite BACnet
•
✓
Impostare i dati motore in base a un numero di codice nella
messa in servizio di base con Operator Panel
Estensione della comunicazione tramite CanOpen
•
-
PM230 in tecnica passante FSD … FSF
Impostazione dei dati dei motori 1LA/1LE tramite numero di codice
•
G120D
Oggetti Multistate Value per allarmi, oggetti Commandable AO,
oggetti per configurazione del regolatore PID
6
Comunicazione tramite Ethernet/IP
✓
✓
-
✓
✓
✓
✓
✓
7
Banda escludibile per ingresso analogico
✓
✓
✓
✓
✓
✓
✓
-
•
Per ogni ingresso analogico è possibile definire una banda
escludibile simmetrica di un intervallo di 0 V.
8
Modifica del comando del freno di stazionamento motore
✓
-
✓
✓
✓
✓
✓
-
9
Funzione di sicurezza SBC (Safe Brake Control)
-
-
-
-
✓
✓
-
-
•
Comando sicuro di un freno di stazionamento motore in caso
di utilizzo dell'opzione "Safe Brake Module"
10
Funzione di sicurezza SS1 (Safe Stop 1) senza sorveglianza del
numero di giri
-
-
-
-
✓
✓
-
-
11
Selezione semplice dei motori standard
✓
✓
✓
✓
✓
✓
✓
✓
•
Selezione dei motori 1LA… e 1LE… con un Operator Panel
tramite una lista con numeri di codice
12
Update del firmware tramite scheda di memoria
✓
✓
✓
✓
✓
✓
✓
✓
13
Safety Infochannel
-
-
-
✓
✓
✓
✓
✓
✓
✓
✓
✓
✓
✓
✓
✓
•
14
Uscita BICO r9734.0…14 per i bit di stato delle funzioni di
sicurezza estese
Allarmi di diagnostica per PROFIBUS
Convertitori con le Control Unit CU240B-2 e CU240E-2
360
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.2 Circuito a stella o a triangolo del motore ed esempi pratici
A.2
Circuito a stella o a triangolo del motore ed esempi pratici
A seconda dell'applicazione, il motore deve funzionare con un circuito a stella o a triangolo
(Y/Δ).
Esempi di funzionamento del convertitore e del motore sulla rete a 400V
Presupposti: Sulla targhetta dei dati tecnici del motore è riportata l'indicazione
230/400 V Δ/Y.
Caso 1: Normalmente un motore funziona dallo stato di arresto fino al numero di giri
nominale (ovvero al numero di giri che corrisponde alla frequenza di rete). In questo caso
occorre collegare il motore in Y.
Il funzionamento del motore al di sopra del numero di giri nominale è possibile solo con
deflussaggio, ossia la coppia disponibile del motore si riduce al di sopra del numero di giri
nominale.
Caso 2: Se si desidera far funzionare il motore con la "caratteristica a 87 Hz", occorre
collegare il motore in Δ.
Con la caratteristica a 87 Hz aumenta la potenza del motore. La caratteristica 87 Hz viene
utilizzata soprattutto per i motoriduttori.
Verificare prima di collegare il motore se il collegamento è idoneo all'applicazione specifica:
Collegamento a stella o a triangolo del motore
Nei motori SIEMENS, sul lato interno
del coperchio della morsettiera sono
raffigurati entrambi i tipi di collegamento:
• Collegamento a stella (Y)
• Collegamento a triangolo (Δ)
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
361
Appendice
A.3 Parametri
A.3
Parametri
I parametri sono l'interfaccia tra il firmware del convertitore e il tool di messa in servizio, ad
es. un Operator Panel.
Parametri di impostazione
I parametri di impostazione sono le viti di regolazione con cui si adatta il convertitore alla
propria applicazione. Quando si modifica il valore di un parametro di impostazione, si cambia
anche il comportamento del convertitore.
I parametri di impostazione sono rappresentati con una "p" iniziale, ad es. p1082 è il
parametro per il numero di giri massimo del motore.
Parametri di supervisione
I parametri di supervisione consentono di leggere le grandezze di misura interne del
convertitore e del motore.
Operator Panel e STARTER rappresentano i parametri di supervisione con una "r" iniziale,
ad es. r0027 è il parametro per la corrente di uscita del convertitore.
Parametri di maggiore utilità
Tabella A- 3 Passaggio alla modalità di messa in servizio o preparazione delle impostazioni di fabbrica
Parametri
Descrizione
p0010
Parametri per la messa in servizio
0: pronto (impostazione di fabbrica)
1: esecuzione della messa in servizio di base
3: esecuzione della messa in servizio del motore
5: applicazioni tecnologiche e unità
15: definizione del numero di blocchi dati
30: impostazione di fabbrica - avvio del ripristino dei valori di fabbrica
Tabella A- 4 Definizione della versione del firmware della Control Unit
Parametri
Descrizione
R0018
Viene visualizzata la versione del firmware
Tabella A- 5 Selezione delle sorgenti di comando e dei valori di riferimento del convertitore
Parametri
Descrizione
p0015
Per maggiori informazioni vedere la sezione Selezione delle impostazioni adeguate delle interfacce
(Pagina 55).
Convertitori con le Control Unit CU240B-2 e CU240E-2
362
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.3 Parametri
Tabella A- 6 Parametrizzazione delle rampe di accelerazione e di decelerazione
Parametri
Descrizione
p1080
Numero di giri minimo
0.00 [1/min] impostazione di fabbrica
p1082
Numero di giri massimo
1500.000 [1/min] impostazione di fabbrica
p1120
Tempo di accelerazione
10.00 [s]
p1121
Tempo di decelerazione
10.00 [s]
Tabella A- 7 Impostazione del tipo di regolazione
Parametri
Descrizione
P1300
0: Controllo U/f con caratteristica lineare
1: Controllo U/f con caratteristica lineare e FCC
2: Controllo U/f con curva caratteristica parabolica
3: Controllo U/f con caratteristica parametrizzabile
4: Controllo U/f con caratteristica lineare e ECO
5: Controllo U/f per azionamenti con frequenza precisa (settore tessile)
6: Controllo U/f per azionamenti con frequenza precisa con FCC
7: Controllo U/f con caratteristica parabolica e ECO
19: Controllo U/f con valore di riferimento della tensione indipendente
20: Regolazione di velocità (senza encoder)
22: Regolazione della coppia (senza encoder)
Tabella A- 8 Ottimizzazione del comportamento all'avvio del controllo U/f con coppia di spunto elevata e sovraccarico
Parametri
Descrizione
p1310
Boost di tensione per la compensazione di perdite ohmiche
Il boost di tensione è attivo dallo stato di fermo fino al numero di giri nominale.
È massimo al numero di giri 0 e diminuisce progressivamente all'aumentare del numero di giri.
Valore del boost di tensione al numero di giri 0 in V:
1,732 × corrente nominale del motore (p0305) × resistenza dello statore (r0395) × p1310 / 100%
p1311
Boost di tensione all'accelerazione
Il boost di tensione è attivo dallo stato di fermo fino al numero di giri nominale.
È indipendente dal numero di giri ed è pari a (in V):
1,732 × corrente nominale del motore (p0305) × resistenza dello statore (p0350) × p1311 / 100%
p1312
Boost di tensione all'avviamento
Impostazione per un ulteriore aumento di tensione all'avviamento, ma solo per il primo processo di
accelerazione.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
363
Appendice
A.4 Uso dell'Operator Panel BOP-2
A.4
Uso dell'Operator Panel BOP-2
Figura A-1
Menu del BOP-2
Figura A-2
Altri tasti e simboli del pannello operatore BOP-2
Convertitori con le Control Unit CU240B-2 e CU240E-2
364
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.4 Uso dell'Operator Panel BOP-2
A.4.1
Modifica delle impostazioni con il BOP-2
Modifica delle impostazioni con il BOP-2
Per modificare le impostazioni del convertitore, si devono modificare i valori dei parametri nel
convertitore. Il convertitore consente di modificare solo i parametri di "scrittura". I parametri
di scrittura sono caratterizzati dalla lettera "P" iniziale, ad es. P45.
Il valore di un parametro di lettura non può essere modificato. I parametri di lettura sono
caratterizzati dalla lettera "r" iniziale, ad es.: r2.
Procedura
Per modificare un parametro di scrittura con il BOP-2, procedere nel seguente modo:
1. Selezionare il menu per la visualizzazione e la modifica dei parametri.
Premere il tasto OK.
2. Servendosi dei tasti freccia, selezionare il filtro parametri.
Premere il tasto OK.
– STANDARD: il convertitore mostra solo i parametri principali.
– EXPERT: il convertitore mostra tutti i parametri.
3. Servendosi dei tasti freccia, selezionare il numero del parametro di scrittura desiderato.
Premere il tasto OK.
4. Con i tasti freccia, impostare il valore del parametro di scrittura.
Applicare il valore premendo il tasto OK.
È stato modificato un parametro di scrittura con il BOP-2.
Il convertitore salva tutte le modifiche effettuate tramite il BOP-2 in modo protetto contro le
interruzioni di rete.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
365
Appendice
A.4 Uso dell'Operator Panel BOP-2
A.4.2
Modifica dei parametri indicizzati
Modifica dei parametri indicizzati
Nei parametri indicizzati, a un numero di parametro sono assegnati più valori di parametri.
Ogni valore di parametro ha un proprio indice.
Procedura
Per modificare un parametro indicizzato, procedere come segue:
1. Selezionare il numero di parametro.
2. Premere il tasto OK e impostare l'indice del
parametro.
3. Premere il tasto OK e impostare il valore del
parametro per l'indice selezionato.
È stato modificato un parametro indicizzato.
A.4.3
Immissione diretta del numero e del valore di parametro
Selezione diretta del numero di parametro
Il BOP-2 offre la possibilità di impostare il numero di parametro cifra per cifra.
Presupposto
Il numero di parametro lampeggia nel display del BOP-2.
Procedura
Per selezionare direttamente il numero di parametro, procedere nel modo seguente:
1. Tenere premuto il tasto OK per più di cinque secondi.
2. Modificare il numero di parametro cifra per cifra.
Premendo il tasto OK il BOP-2 passa alla cifra
successiva.
3. Una volta immesse tutte le cifre del numero di parametro,
premere il tasto OK.
Il numero di parametro è stato immesso direttamente.
Convertitori con le Control Unit CU240B-2 e CU240E-2
366
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.4 Uso dell'Operator Panel BOP-2
Immissione diretta del valore di parametro
Il BOP-2 offre la possibilità di impostare il valore di parametro cifra per cifra.
Presupposto
Il valore di parametro lampeggia nel display del BOP-2.
Procedura
Per selezionare direttamente il valore di parametro, procedere nel modo seguente:
1. Tenere premuto il tasto OK per più di cinque secondi.
2. Modificare il valore di parametro cifra per cifra.
Premendo il tasto OK il BOP-2 passa alla cifra
successiva.
3. Una volta immesse tutte le cifre del valore di parametro,
premere il tasto OK.
Il valore di parametro è stato immesso direttamente.
A.4.4
Non è possibile modificare un parametro
In quali casi non è permesso modificare i parametri?
Il convertitore indica il motivo per cui non è permesso modificare un parametro:
Si è cercato di modificare un
parametro di lettura.
Per impostare questo
parametro, passare alla
messa in servizio di base.
Per impostare questo
parametro, disinserire il
motore.
Il Manuale delle liste indica, per ogni parametro, lo stato operativo nel quale il parametro può
essere modificato.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
367
Appendice
A.5 Uso di STARTER
A.5
Uso di STARTER
A.5.1
Modifica impostazioni
Dopo la messa in servizio di base è possibile adattare il convertitore all'applicazione, come
descritto in Linee guida per la messa in servizio (Pagina 67).
STARTER consente di eseguire l'operazione in due modi:
● Modificare le impostazioni tramite le maschere - metodo consigliato.
① Barra di navigazione: Per ogni funzione del convertitore selezionare la maschera
corrispondente.
② Scheda: Passare da una maschera all'altra.
Quando si modificano le impostazioni tramite le maschere, non è necessario conoscere i
numeri di parametro.
● Modificare le impostazioni tramite i parametri della Lista esperti.
Per modificare le impostazioni tramite la Lista esperti, è necessario conoscere i numeri di
parametro e il loro significato.
Salvataggio delle impostazioni in modo protetto contro le interruzioni di rete
Il convertitore salva inizialmente le modifiche solo in modo temporaneo. Perché il
convertitore salvi le impostazioni in modo protetto contro le interruzioni di rete, occorre
procedere nel seguente modo:
Procedura
Per salvare le impostazioni nel convertitore in modo protetto contro le interruzioni di rete,
procedere nel seguente modo:
1. Selezionare l'azionamento corrispondente nella navigazione di progetto.
2. Fare clic sul pulsante
per salvare (Copia da da RAM a ROM).
Le impostazioni sono state salvate in modo protetto contro le interruzioni di rete.
Convertitori con le Control Unit CU240B-2 e CU240E-2
368
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.5 Uso di STARTER
Vai offline
Dopo aver salvato i dati (Copia da RAM a ROM), interrompere il collegamento online con
"Scollega da sistema di destinazione".
A.5.2
Ottimizzazione dell'azionamento con la funzione Trace
Descrizione
La funzione Trace consente di eseguire la diagnostica del convertitore e di ottimizzare il
comportamento dell'azionamento. La funzione si avvia dalla barra di navigazione con
"...Control_Unit/Messa in servizio/Trace apparecchio".
In due impostazioni indipendenti l'una dall'altra è possibile interconnettere otto segnali alla
volta tramite . Ogni segnale che si interconnette è normalmente attivo.
È possibile avviare una misurazione quante volte si vuole; i risultati vengono
temporaneamente memorizzati nella scheda "Misure" con la data e l'ora (finché non si
chiude STARTER). Alla chiusura di STARTER o nella scheda "Misure" è possibile salvare i
risultati della misurazione nel formato *.trc.
Quando per le misure sono necessarie più di due impostazioni, è possibile salvare i singoli
Trace nel progetto o esportarli nel formato *.clg e caricarli o importarli in casi specifici.
Registrazione
La registrazione viene effettuata in un clock di base dipendente dalla CU. La durata
massima della registrazione dipende dal numero dei segnali registrati e dal clock di Trace.
È possibile prolungare la durata della registrazione aumentando il clock di Trace mediante
moltiplicazione per un fattore intero, quindi applicare la durata massima visualizzata
mediante . In alternativa è possibile definire la durata della misura e far calcolare il clock di
Trace da STARTER mediante .
Registrazione di bit singoli in parametri per bit
Per registrare i singoli bit di un parametro (ad es. r0722), assegnare il bit corrispondente
tramite "Traccia di bit" (
).
Funzione matematica
La funzione matematica (
) consente all'utente di definire autonomamente una curva, ad
es. la differenza tra valore di riferimento del numero di giri e valore reale del numero di giri.
Nota
Quando si utilizzano le opzioni "Registrazione bit singoli" o "Funzioni matematiche", la scelta
viene visualizzata nel segnale n. 9.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
369
Appendice
A.5 Uso di STARTER
Trigger
Per Trace è possibile definire una condizione di avvio (trigger). Per impostazione di fabbrica,
(Avvio Trace). Il pulsante consente di
Trace viene avviato premendo il pulsante
specificare altri trigger per l'inizio della misura.
Tramite il pretrigger impostare il tempo per il quale si desidera una registrazione, prima di
specificare il trigger. In questo modo si registra anche la condizione di trigger.
Esempio di modello di bit come trigger:
È necessario specificare il modello e il valore di un parametro bit per il trigger. Procedere nel
seguente modo:
Tramite
selezionare "Trigger su variabile - Modello di bit"
Tramite
selezionare il parametro di bit
Tramite
①
②
aprire la maschera in cui impostare i bit e i valori per la condizione di avvio
Selezionare i bit per il trigger di Trace, riga superiore in formato esadecimale, riga inferiore in
formato binario
Specificare i valori dei bit per il trigger di Trace, riga superiore in formato esadecimale, riga
inferiore in formato binario
Figura A-3
Modello di bit
Nell'esempio Trace si avvia quando DI0 e DI3 sono high e DI2 low. La condizione degli altri
ingressi digitali è irrilevante per l'avvio di Trace.
Come condizione di avvio è inoltre possibile impostare un avviso o un'anomalia.
Convertitori con le Control Unit CU240B-2 e CU240E-2
370
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.5 Uso di STARTER
Opzioni di visualizzazione
In quest'area si definisce il tipo di rappresentazione dei risultati della misura.
● Ripetizione della misura
Consente di sovrapporre le misure eseguite per tempi diversi.
● Disponi curve in tracce
Consente di specificare se rappresentare tutti i valori di misura su un linea dello zero
comune o se rappresentare ogni valore di misura con una propria linea dello zero.
● Cursore di misura attivo
Consente di considerare in dettaglio gli intervalli di misura.
Figura A-4
Finestra di dialogo Trace
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
371
Appendice
A.6 Interconnessione dei segnali nel convertitore
A.6
Interconnessione dei segnali nel convertitore
A.6.1
Nozioni di base
Nel convertitore sono realizzate le funzioni seguenti:
● Funzioni di controllo e regolazione
● Funzioni di comunicazione
● Funzioni di diagnostica e comando
Ogni funzione è costituita da uno o più blocchi interconnessi tra loro.
Figura A-5
Esempio di blocco: Potenziometro motore (MOP)
La maggior parte dei blocchi può essere adattata all'applicazione tramite parametri.
L'interconnessione dei segnali all'interno di un blocco non può essere modificata. È però
possibile modificare l'interconnessione tra i blocchi interconnettendo gli ingressi di un blocco
con le uscite adatte di un altro blocco.
L'interconnessione dei segnali dei blocchi, al contrario di quanto accade nella tecnica di
commutazione elettrica, non avviene tuttavia via cavo, ma mediante il software.
Figura A-6
Esempio: Interconnessione dei segnali di due blocchi per l'ingresso digitale 0
Convertitori con le Control Unit CU240B-2 e CU240E-2
372
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.6 Interconnessione dei segnali nel convertitore
Binettori e connettori
I connettori e i binettori servono allo scambio dei segnali tra i singoli blocchi:
● I connettori permettono di interconnettere i segnali "analogici" (ad es. numero di giri di
uscita MOP)
● I binettori permettono di interconnettere i segnali "digitali" (ad es. il comando 'Abilitazione
MOP più alto')
Figura A-7
Simboli per ingressi e uscite binettore e connettore
Per le uscite binettore/connettore (CO/BO) si tratta di parametri che riuniscono più uscite
binettore in una sola parola (ad esempio r0052 CO/BO:parola di stato 1). Ogni bit della
parola rappresenta un segnale digitale (binario). Questo raggruppamento riduce il numero
dei parametri e semplifica la parametrizzazione.
Le uscite binettore o connettore (CO, BO o CO/BO) possono essere utilizzate più volte.
Quando vanno interconnessi i segnali nel convertitore?
Se si modifica l'interconnessione dei segnali nel convertitore, è possibile adattare il
convertitore alle esigenze più svariate. Non deve necessariamente trattarsi di funzioni
complesse.
Esempio 1: assegnare un significato diverso a un ingresso digitale.
Esempio 2: cambiare il valore del numero di giri da frequenza fissa a ingresso digitale.
Quali precauzioni occorre adottare quando si modifica l'interconnessione dei segnali?
Procedere con attenzione quando si eseguono le interconnessioni dei segnali interne.
Prendere nota delle modifiche apportate, in modo da facilitare un'eventuale analisi
successiva.
Il tool di messa in servizio STARTER visualizza i segnali in testo in chiaro e ne semplifica
l'interconnessione.
Dove si possono reperire ulteriori informazioni?
● Per le interconnessioni semplici di segnali, ad esempio l'assegnazione di un altro
significato agli ingressi digitali, sono sufficienti le istruzioni contenute nel presente
manuale.
● Per le interconnessioni più complesse è sufficiente la lista dei parametri contenuta nel
Manuale delle liste.
● Per una panoramica generale delle interconnessioni dei segnali, fare riferimento agli
schemi logici contenuti nel Manuale delle liste.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
373
Appendice
A.6 Interconnessione dei segnali nel convertitore
A.6.2
Esempio
Esempio: trasferimento di una logica del PLC semplice nel convertitore
Il presupposto per l'avvio di un impianto di convogliamento è la presenza contemporanea di
due segnali. Questi segnali possono essere, ad esempio:
● La pompa dell'olio è in funzione (la pressione comincia tuttavia a formarsi solo dopo 5
secondi)
● Lo sportello di protezione è chiuso.
Per risolvere il compito occorre inserire blocchi funzione liberi tra l'ingresso digitale 0 e il
comando per l'inserzione del motore (ON/OFF1).
Figura A-8
Esempio: interconnessione dei segnali per una logica del PLC
Il segnale dell'ingresso digitale 0 (DI 0) è condotto tramite un blocco temporale (PDE 0) e
interconnesso con l'ingresso di un blocco logico (AND 0). Sul secondo ingresso del blocco
logico è interconnesso il segnale dell'ingresso digitale 1 (DI 1). L'uscita del blocco logico
imposta il comando ON/OFF1 per l'accensione del motore.
Impostazione della logica del PLC
Parametri
Descrizione
p20161 = 5
Abilitazione del blocco temporale mediante assegnazione al gruppo di
esecuzione 5 (intervallo di tempo 128 ms)
p20162 = 430
Sequenza di esecuzione del blocco temporale all'interno del gruppo di
esecuzione 5 (elaborazione prima del blocco logico AND)
p20032 = 5
Abilitazione del blocco logico AND mediante assegnazione al gruppo di
esecuzione 5 (intervallo di tempo 128 ms)
p20033 = 440
Sequenza di esecuzione del blocco logico AND all'interno del gruppo di
esecuzione 5 (elaborazione dopo il blocco temporale)
p20159 = 5000.00
Impostazione del tempo di ritardo [in ms] del blocco temporale: 5 secondi
p20158 = 722.0
Collegamento dello stato di DI 0 all'ingresso del blocco temporale
r0722.0 = parametro che indica lo stato dell'ingresso digitale 0.
p20030 [0] = 20160
Collegamento del blocco temporale al 1º ingresso AND
p20030 [1] = 722.1
Collegamento dello stato di DI 1 al 2º ingresso AND
r0722.1 = parametro che indica lo stato dell'ingresso digitale 1.
p0840 = 20031
Interconnessione dell'uscita AND su ON/OFF1
Convertitori con le Control Unit CU240B-2 e CU240E-2
374
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.6 Interconnessione dei segnali nel convertitore
Spiegazioni dell'esempio in base al comando ON/OFF1
Il parametro p0840[0] è l'ingresso del blocco "ON/OFF1" del convertitore. Il parametro
r20031 è l'uscita del blocco AND. Per interconnettere ON/OFF1 con l'uscita del blocco AND,
impostare P0840 = 20031.
Figura A-9
Interconnessione di blocchi mediante l'impostazione di p0840[0] = 20031
Logica del collegamento dei blocchi
Interconnettere sempre l'ingresso (ingresso connettore o binettore) con la sorgente del
segnale.
Nota
Per la messa in servizio di base, determinare la funzione delle interfacce del convertitore
tramite impostazioni predefinite (p0015).
Quando successivamente si seleziona un'altra impostazione predefinita per la funzione delle
interfacce, tutte le interconnessioni modificate andranno perse.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
375
Appendice
A.7 Esempi applicativi
A.7
Esempi applicativi
A.7.1
Configurazione della comunicazione PROFIBUS in STEP 7
A.7.1.1
Presupposto
In questa sezione viene descritto un esempio di configurazione della comunicazione di un
convertitore con un controllore SIMATIC sovraordinato.
Per configurare la comunicazione tra un convertitore e un controllore SIMATIC sovraordinato
occorre il tool software SIMATIC STEP 7 con Config HW.
Si presuppone che l'utente sappia utilizzare un PLC SIMATIC e conosca bene il tool di
engineering STEP 7.
A.7.1.2
Creazione di un progetto e di una rete STEP 7
Procedura
Per creare un progetto STEP 7, procedere nel seguente modo:
1. Creare un nuovo progetto STEP 7, ad es. "G120_in_S7".
2. Inserire una CPU S7 300 del PLC SIMATIC.
3. Selezionare la stazione SIMATIC 300 nel progetto e aprire Config HW.
4. Trascinare nel progetto una guida profilata S7-300 scegliendola dal catalogo hardware.
5. Occupare il posto connettore 1 di questa guida profilata con un alimentatore di corrente e
il posto connettore 2 con un controllore CPU 315-2 DP.
Al momento dell'inserimento del controllore, Config HW apre l'impostazione della rete.
6. Creare una rete PROFIBUS DP.
Convertitori con le Control Unit CU240B-2 e CU240E-2
376
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.7 Esempi applicativi
Sono stati creati un progetto STEP 7 con un controllore SIMATIC e una rete PROFIBUS.
A.7.1.3
Inserimento del convertitore nel progetto
Esistono due modi per inserire il convertitore nel progetto:
● Tramite il GSD del convertitore
● Tramite l'Object Manager STEP 7
Questo modo, più pratico, è utilizzabile solo se è installato STARTER (vedere la sezione
Utensili per la messa in servizio del convertitore (Pagina 35)).
Sull'esempio di un SINAMICS G120 con Control Unit CU240B-2 o CU240E-2 viene descritta
la procedura di inserimento del convertitore nel progetto tramite GSD.
Presupposto
È stato installato il GSD del convertitore sul PC tramite Config HW (Menu "Strumenti Installa file GSD").
Procedura
Procedere nel modo seguente per inserire un convertitore nel progetto:
1. Inserire il convertitore nella rete PROFIBUS tramite drag & drop.
Il convertitore si trova in "PROFIBUS DP - Altri apparecchi di campo" nel catalogo
hardware di Config HW.
2. Immettere in Config HW l'indirizzo PROFIBUS impostato sul convertitore.
3. Selezionare il telegramma adatto e trascinarlo sul posto connettore 1 del convertitore.
Per maggiori inormazioni sui tipi di telegrammi vedere il capitolo Comunicazione ciclica
(Pagina 111).
4. Per occupare più posti connettore del convertitore con telegrammi, occorre rispettare la
sequenza consentita di occupazione dei posti connettore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
377
Appendice
A.7 Esempi applicativi
5. Salvare e compilare il progetto.
6. Caricare i dati di progetto nella CPU S7.
Il convertitore è stato inserito nel progetto e la progettazione è stata caricata nella CPU.
Sequenza consentita per l'occupazione dei posti connettore
1. Telegramma PROFIsafe, se utilizzato.
Il collegamento del convertitore tramite PROFIsafe è descritto nel "Manuale di guida alle
funzioni Safety Integrated".
2. Canale PKW, se utilizzato.
3. Telegramma standard, SIEMENS o libero, se utilizzato.
4. Comunicazione diretta
Se uno o più dei telegrammi 1, 2 o 3 non vengono utilizzati, progettare i telegrammi a partire
dal posto connettore 1.
Nessuna comunicazione ciclica con il convertitore con modulo universale
Un modulo universale con le seguenti caratteristiche non è consentito:
● Lunghezza PZD 4/4 parole
● Coerenza per tutta la la lunghezza
Con queste caratteristiche il modulo universale ha lo stesso codice DP (4AX) del "Canale
PKW 4 parole". Il controllore sovraordinato non stabilisce alcuna comunicazione ciclica con il
convertitore.
Rimedio per il modulo universale:
● Nelle caratteristiche dello slave DP modificare la lunghezza PZD a 8/8 byte
● Modificare la coerenza a "Unità".
Convertitori con le Control Unit CU240B-2 e CU240E-2
378
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.7 Esempi applicativi
A.7.2
Configurazione della comunicazione PROFINET in STEP 7
In questa sezione viene descritto un esempio di configurazione della comunicazione di un
convertitore con un controllore SIMATIC sovraordinato.
Per configurare la comunicazione tra un convertitore e un controllore SIMATIC sovraordinato
occorre il tool software SIMATIC STEP 7 con Config HW.
Si presuppone che l'utente sappia utilizzare un PLC SIMATIC e conosca bene il tool di
engineering STEP 7.
A.7.2.1
Progettazione di controllore e convertitore in Config HW
Sull'esempio di un SINAMICS G120 con Control Unit CU240B-2 o CU240E-2 viene descritta
la procedura di inserimento del convertitore nel progetto.
Procedura
Per configurare la comunicazione tramite PROFINET tra convertitore e controllore,
procedere nel seguente modo:
1. Aprire Config HW in STEP 7 tramite "Inserisci/[stazione]" e creare i componenti
corrispondenti alla struttura hardware. L'esempio seguente si limita ai componenti
strettamente necessari.
2. Configurare la stazione con rack e alimentatore.
3. Inserire la CPU.
Config HW apre una maschera con proposte per il successivo indirizzo IP libero e una
subnet mask.
4. Se si è configurata una rete locale e non si lavora nell'ambito di una rete Ethernet di
grandi dimensioni, utilizzare i dati proposti.
In caso contrario occorre richiedere gli indirizzi IP per i nodi PROFINET e la subnet mask
al proprio amministratore. CPU e Supervisor devono avere la stessa subnet mask.
5. Premendo il pulsante "Nuovo" si può creare una nuova sottorete PROFINET o
selezionarne una già esistente.
6. Assegnare un nome alla rete PROFINET.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
379
Appendice
A.7 Esempi applicativi
7. Uscire da questa finestra e da quella successiva premendo OK.
8. Selezionare la sottorete.
9. Inserire prima il convertitore trascinandolo dal catalogo hardware.
10.Inserire il telegramma di comunicazione.
11.Aprire la finestra delle proprietà del convertitore e assegnare un nome univoco e
significativo al convertitore stesso.
In base al nome dell'apparecchio il controller PROFINET assegna l'indirizzo IP
all'avviamento.
12.In questa finestra si trova anche l'indirizzo IP proposto dal sistema. Se necessario,
modificare l'indirizzo IP da "Proprietà".
13.Salvare ora la configurazione hardware con "Salva e compila" (
).
14.Caricare la configurazione nel controllore premendo il pulsante
.
Convertitori con le Control Unit CU240B-2 e CU240E-2
380
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.7 Esempi applicativi
15.Impostare l'indirizzo IP del controllore.
Se non si ha un indirizzo IP disponibile, visualizzare l'elenco di nodi raggiungibili
premendo il pulsante "Visualizza". Selezionare il controllore nell'elenco dei nodi
raggiungibili e chiudere la finestra premendo OK.
16.Se si è installato Drive ES Basic, aprire STARTER facendo doppio clic sul simbolo del
convertitore in Hardware Manager e configurare il convertitore in STARTER.
In questo caso il nome dell'apparecchio in STARTER corrisponde automaticamente
all'indirizzo IP. Di conseguenza la procedura descritta nella sezione seguente è
superflua.
17.Se si lavora con il file GSDML, chiudere ora Config HW e creare un riferimento per
STARTER come nella sezione seguente.
È stata configurata la comunicazione tramite PROFINET tra convertitore e controllore.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
381
Appendice
A.7 Esempi applicativi
A.7.2.2
Creazione del riferimento per STARTER
Se si è configurato il convertitore tramite il file GSDML, occorre creare un riferimento del
convertitore per STARTER in STEP 7 per poter avviare STARTER da STEP 7.
La procedura è descritta sull'esempio di un SINAMICS G120 con Control Unit CU240B-2 o
CU240E-2.
Procedura
Per creare un riferimento del convertitore per STARTER, procedere nel seguente modo:
1. Selezionare il progetto in SIMATIC Manager
2. Aprire la finestra di dialogo "Inserisci apparecchio di azionamento singolo" premendo il
pulsante destro del mouse "Inserisci nuovo oggetto/SINAMICS".
3. Nella scheda "Apparecchio di azionamento/indirizzo" impostare la famiglia di apparecchi,
l'apparecchio e la versione del firmware.
4. Selezionare il convertitore nel modello dell'apparecchio.
5. Impostare l'accesso online.
6. Impostare l'indirizzo.
7. Immettere il nome dell'apparecchio PROFINET nella scheda "Generale".
8. Chiudere la maschera con OK.
9. Il convertitore è visibile nel progetto.
Nel progetto è stato creato un riferimento del convertitore per STARTER. Ora è possibile
avviare STARTER dal progetto STEP 7.
Convertitori con le Control Unit CU240B-2 e CU240E-2
382
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.7 Esempi applicativi
A.7.2.3
Richiamo di STARTER e passaggio online
Procedura
Per avviare STARTER da STEP 7 e stabilire un collegamento online con il convertitore,
procedere nel seguente modo:
1. Selezionare il convertitore in SIMATIC Manager con il pulsante destro del mouse.
2. Aprire STARTER selezionando "Apri oggetto".
3. Configurare il convertitore in STARTER e fare clic sul pulsante Online (
).
4. Nella finestra successiva selezionare il convertitore e come punto di accesso scegliere
S7ONLINE.
5. Chiudere la maschera con OK.
È stato avviato STARTER da STEP 7 e si è creato il collegamento online con il convertitore.
A.7.2.4
Attivazione di messaggi di diagnostica tramite STEP 7
Procedura
Per attivare i messaggi di diagnostica del convertitore, procedere nel modo seguente:
1. Selezionare il convertitore in Config HW.
Figura A-10
Selezione del convertitore in Config HW
2. Facendo doppio clic sul posto connettore 0 nella finestra della stazione, aprire la finestra
delle proprietà per le impostazioni di rete del convertitore.
3. Selezionare la scheda Parametri
4. Attivare gli allarmi standard.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
383
Appendice
A.7 Esempi applicativi
I messaggi di diagnostica sono stati attivati.
Al successivo avvio del controllore, i messaggi di diagnostica del convertitore vengono
trasmessi al controllore.
A.7.3
Esempi di programma STEP 7
Scambio di dati tramite il bus di campo
Segnali analogici
Il convertitore normalizza sempre i segnali trasmessi dal bus di campo al valore di 4000 hex.
Tabella A- 9 Categoria di segnale e rispettivi parametri di normazione
Categoria di segnale
4000 hex ≙ …
Categoria di segnale
4000 hex ≙ …
Numeri di giri, frequenze
p2000
Potenza
p2004
Tensione
p2001
Angolo
p2005
Corrente
p2002
Temperatura
p2006
Coppia
p2003
Accelerazione
p2007
Parole di comando e di stato
Le parole di comando e di stato sono costituite da un byte di valore più alto e uno di valore
più basso. Un controllore SIMATIC interpreta le parole diversamente dal convertitore: i byte
di valore più alto e più basso vengono rispettivamente scambiati in una trasmissione. Vedere
anche l'esempio di programma seguente.
Convertitori con le Control Unit CU240B-2 e CU240E-2
384
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.7 Esempi applicativi
A.7.3.1
Esempio di programma STEP 7 per la comunicazione ciclica
Il controllore e il convertitore comunicano tramite
il telegramma standard 1. Il controllore imposta
la parola di comando 1 (STW1) e il valore di
riferimento del numero di giri; il convertitore
risponde con la parola di stato 1 (ZSW1) e il suo
valore attuale del numero di giri.
In questo esempio gli ingressi E0.0 e E0.6
vengono collegati con il bit ON/OFF1 oppure con
il bit di tacitazione anomalia dell' STW 1.
La parola di comando 1 contiene il valore
numerico 047E hex. I bit della parola di comando
1 sono riportati nella tabella seguente.
Il valore numerico esadecimale 2500 imposta la
frequenza di riferimento del convertitore. La
frequenza massima corrisponde al valore
esadecimale 4000 (vedere anche Esempi di
programma STEP 7 (Pagina 384)).
Il controllore scrive i dati di processo ciclici
nell'indirizzo logico 256 del convertitore. Anche il
convertitore scrive i suoi dati di processo
nell'indirizzo logico 256. Il campo indirizzi viene
definito in Config HW.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
385
Appendice
A.7 Esempi applicativi
Tabella A- 10 Assegnazione dei bit di comando del convertitore ai merker e agli ingressi del SIMATIC
HEX
BIN
Bit in
STW1
Significato
Bit in
MW1
E
0
0
ON / OFF1
1
1
OFF2
1
2
1
1
7
4
0
Bit in
MB1
Bit in
MB2
Ingressi
8
0
E0.0
9
1
OFF3
10
2
3
Abilitazione funzionamento
11
3
4
Abilitazione del generatore di
rampa
12
4
1
5
Avvio generatore di rampa
13
5
1
6
Abilitazione valore di riferimento
14
6
0
7
Tacitazione anomalia
15
0
8
JOG 1
0
0
0
9
JOG 2
1
1
1
10
Comando dal PLC
2
2
0
11
Inversione valore di riferimento
3
3
0
12
Senza significato
4
4
0
13
Potenziometro motore ↑
5
5
0
14
Potenziometro motore ↓
6
6
0
15
Commutazione del set di dati
7
7
7
E0.6
Convertitori con le Control Unit CU240B-2 e CU240E-2
386
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.7 Esempi applicativi
A.7.3.2
Esempio di programma STEP 7 per la comunicazione aciclica
M9.0 avvia la lettura dei parametri
M9.1 avvia la scrittura dei parametri
M9.2 visualizza il processo di lettura
M9.3 visualizza il processo di scrittura
Il numero di job simultanei per la comunicazione
aciclica è limitato. Ulteriori informazioni sono
disponibili in Comunicazione set di dati
(http://support.automation.siemens.com/WW/vie
w/it/15364459).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
387
Appendice
A.7 Esempi applicativi
Figura A-11
Lettura di parametri
Nota
Blocchi funzione standard (SFB) al posto di funzioni di sistema (SFC) in PROFINET
Nella comunicazione aciclica tramite PROFINET è necessario sostituire le funzioni di
sistema con blocchi funzione standard, come segue:
• SFC 58 → SFB 53
• SFC 59 → SFB 52
Convertitori con le Control Unit CU240B-2 e CU240E-2
388
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.7 Esempi applicativi
Spiegazione di FC 1
Tabella A- 11 Job per la lettura di parametri
Blocco dati DB 1
Byte n
Byte n + 1
n
Header
RiferimentoMB 40
01 hex: job di lettura
0
01 hex
Numero dei parametri (m) MB 62
2
Attributo 10 hex: valore del
Numero degli indiciMB 58
4
Indirizzo del
parametro 1
Indirizzo del
parametro 2
Indirizzo del
parametro 3
parametro
Numero del parametroMW 50
6
Numero del 1° indiceMW 63
8
Attributo 10 hex: valore del
parametro
Numero degli indiciMB 59
Numero del parametroMW 52
12
Numero del 1° indiceMW 65
14
Attributo 10 hex: valore del
parametro
Numero degli indiciMB 60
Numero del parametroMW 54
Attributo 10 hex: valore del
parametro
16
18
Numero del 1° indiceMW 67
Indirizzo del
parametro 4
10
20
Numero degli indiciMB 61
22
Numero del parametroMW 56
24
Numero del 1° indiceMW 69
26
L'SFC 58 acquisisce dal DB 1 i dati dei parametri da leggere e li invia sotto forma di richiesta
di lettura al convertitore. Finché è in corso questo job di lettura, non sono ammessi altri job di
lettura.
In seguito alla richiesta di lettura e dopo un tempo di attesa di un secondo, il convertitore
acquisisce i valori dei parametri dal convertitore tramite SFC 59 e li memorizza nel DB 2.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
389
Appendice
A.7 Esempi applicativi
Figura A-12
Scrittura di parametri
Spiegazione di FC 3
Tabella A- 12 Job per la modifica di parametri
Blocco dati DB 3
Byte n
Byte n + 1
n
Header
RiferimentoMB 42
02 hex: job di modifica
0
01 hex
Numero dei parametriMB 44
2
10 hex: valore del parametro
Numero degli indici00 hex
4
Indirizzo del
parametro 1
Valori del
parametro 1
Numero del parametroMW 21
6
Numero del 1° indiceMW 23
8
FormatoMB 25
Valore del 1° indiceMW35
Numero dei valori degli indiciMB 27
10
12
L'SFC 58 acquisisce dal DB 3 i dati relativi ai parametri da scrivere e li invia al convertitore.
Per tutta la durata di questo job di scrittura il convertitore blocca ulteriori job di scrittura.
Convertitori con le Control Unit CU240B-2 e CU240E-2
390
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.7 Esempi applicativi
A.7.4
Configurazione del traffico trasversale in STEP 7
Due azionamenti comunicano attraverso il telegramma standard 1 con il controllore
sovraordinato. Inoltre, l'azionamento 2 riceve il suo valore di riferimento del numero di giri
direttamente dall'azionamento 1 (numero di giri attuale).
Figura A-13
Comunicazione con il controllore sovraordinato e tra azionamenti con la comunicazione diretta
Impostazione della comunicazione diretta nel convertitore
Procedura
Per impostare la comunicazione diretta nel controllore, procedere nel seguente modo:
1.
In Config HW, inserire nell'azionamento 2
(Subscriber) un oggetto di comunicazione diretta,
ad es. "Slave-to-Slave, PZD2".
2.
Con un doppio clic aprire la
finestra di dialogo per
effettuare le ulteriori
impostazioni per la
comunicazione diretta.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
391
Appendice
A.7 Esempi applicativi
3.
Aprire la scheda
"Configurazione indirizzo".
4.
Selezionare la riga 1.
5.
Aprire la finestra di dialogo
nella quale definire il
Publisher e il campo indirizzi
da trasferire.
6.
Selezionare DX per lo
scambio dati diretto
7.
Selezionare l'indirizzo
dell'azionamento 1
(Publisher).
8.
Nel campo indirizzi
selezionare l'indirizzo iniziale
del campo dati che verrà
ricevuto dall'azionamento 1.
Nell'esempio si tratta, con
l'indirizzo iniziale 256, della
parola di stato 1 (PZD1) e del
valore attuale del numero di
giri.
9.
Chiudere entrambe le finestre
di dialogo con OK.
Il campo di valori per la comunicazione diretta è stato impostato.
L'azionamento 2 riceve i dati inviati nella comunicazione diretta e li scrive nelle successive
parole disponibili, in questo caso PZD3 e PZD4.
Impostazioni nell'azionamento 2 (Subscriber)
L'azionamento 2 è preimpostato in modo da ricevere il suo valore di riferimento dal
controllore sovraordinato. Affinché l'azionamento 2 riceva il valore attuale inviato
dall'azionamento 1 come valore di riferimento, eseguire le seguenti impostazioni:
● Nell'azionamento 2 impostare la selezione telegramma PROFIdrive a "Progettazione
telegrammi libera" (p0922 = 999).
● Nell'azionamento 2 impostare la sorgente del valore di riferimento principale a
p1070 = 2050.3.
Nel parametro r2077 il convertitore mostra gli indirizzi dei convertitori per i quali è progettata
la comunicazione diretta.
Convertitori con le Control Unit CU240B-2 e CU240E-2
392
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.7 Esempi applicativi
A.7.5
Collegamento di ingressi digitali fail-safe
Nei seguenti esempi è illustrata l'interconnessione di un ingresso digitale fail-safe per PL d
secondo EN 13849-1 e SIL2 secondo IEC61508. Per ulteriori esempi e informazioni,
consultare il manuale di guida alle funzioni Safety Integrated.
Gli esempi si riferiscono a PL d secondo EN 13849-1 e SIL2 secondo IEC61508, in una
configurazione con tutti i componenti all'interno di un armadio elettrico.
Figura A-14
Collegamento di un sensore, ad es. pulsante a fungo di arresto di emergenza o finecorsa
Figura A-15
Collegamento di un dispositivo di sicurezza, ad es. SIRIUS 3TK28
Figura A-16
Collegamento di una unità di uscita digitale F, ad es. l'unità di uscita digitale SIMATIC F
Altre opzioni di collegamento e collegamenti in quadri elettrici separati sono descritti nel
manuale di guida alle funzioni Safety Integrated, vedere la sezione: Ulteriori informazioni sul
convertitore (Pagina 397).
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
393
Appendice
A.8 Documentazione per il collaudo delle funzioni di sicurezza
A.8
Documentazione per il collaudo delle funzioni di sicurezza
A.8.1
Documentazione della macchina
Descrizione della macchina o dell'impianto
Designazione
…
Tipo
…
Numero di serie
…
Costruttore
…
Cliente finale
…
Vista d'insieme della macchina o dell'impianto:
…
…
…
…
…
…
…
Dati del convertitore
Tabella A- 13 Versione hardware del convertitore rilevante per la sicurezza
Designazione
dell'azionamento
Numero di ordinazione e versione hardware del convertitore
…
…
…
…
Tabella delle funzioni
Tabella A- 14 Funzioni di sicurezza attive dipendenti da modalità operativa e dispositivo di sicurezza
Modo operativo
Dispositivo di sicurezza
Azionamento
Funzione di sicurezza selezionata
…
…
…
…
…
…
…
…
Porta di protezione chiusa
Nastro
trasportatore
---
Porta di protezione aperta
Nastro
trasportatore
STO
Pulsante di arresto di
emergenza attivo
Nastro
trasportatore
STO
Verificato
Esempio:
Automatico
---
Convertitori con le Control Unit CU240B-2 e CU240E-2
394
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.8 Documentazione per il collaudo delle funzioni di sicurezza
Protocolli dei test di collaudo
Nomi dei file dei protocolli del test di collaudo
…
…
…
…
Backup dei dati
Dati
Supporto di memorizzazione
Tipo di
conservazione
Designazione
Luogo di
conservazione
Data
Protocolli dei test di
collaudo
…
…
…
…
Programma PLC
…
…
…
…
Schemi elettrici
…
…
…
…
Controfirme
Addetto alla messa in servizio
Viene confermata la corretta esecuzione dei test e dei controlli suddetti.
Data
…
Nome
…
Ditta / reparto
…
Firma
…
Costruttore della macchina
Viene confermata la correttezza delle suddette impostazioni protocollate.
Data
…
Nome
…
Ditta / reparto
…
Firma
…
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
395
Appendice
A.8 Documentazione per il collaudo delle funzioni di sicurezza
A.8.2
Protocollo delle impostazioni per le funzioni di base, firmware V4.4 ... V4.6
Azionamento = <pDO-NAME_v>
Tabella A- 15 Versione firmware
Nome
Numero
Valore
Versione del firmware della Control Unit
r18
<r18_v>
SI Versione funzioni di sicurezza integrate nell'azionamento
(processore 1)
r9770
<r9770_v>
Nome
Numero
Valore
SI Clock di sorveglianza (processore 1)
r9780
<r9780_v>
Nome
Numero
Valore
SI Checksum di riferimento parametri SI (processore 1)
p9799
<p9799_v>
SI Checksum di riferimento parametri SI (processore 2)
p9899
<p9899_v>
Nome
Numero
Valore
SI Abilitazione funzioni integrate nell'azionamento
p9601
<p9601_v>
Solo per Control Unit
CU250S-2
p9602
<p9602_v>
SI Indirizzo PROFIsafe
p9610
<p9610_v>
SI Tempo di tolleranza per la commutazione F-DI
p9650
<p9650_v>
SI Tempo di antirimbalzo STO
p9651
<p9651_v>
Solo per Control Unit
CU250S-2
p9652
<p9652_v>
p9659
<p9659_v>
Nome
Numero
Valore
SI Checksum controllo modifiche
r9781[0]
<r9781[0]_v>
SI Checksum controllo modifiche
r9781[1]
<r9781[1]_v>
SI Indicazione oraria controllo modifiche
r9782[0]
<r9782[0]_v>
SI Indicazione oraria controllo modifiche
r9782[1]
<r9782[1]_v>
Tabella A- 16 Clock di sorveglianza
Tabella A- 17 Checksum
Tabella A- 18 Impostazioni della funzione di sicurezza
SI Abilitazione del comando di frenatura
sicuro
SI Safe Stop 1 Tempo di ritardo
SI Timer dinamizzazione forzata
Tabella A- 19 Registro Safety
Convertitori con le Control Unit CU240B-2 e CU240E-2
396
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.9 Ulteriori informazioni sul convertitore
A.9
Ulteriori informazioni sul convertitore
Tabella A- 20 Manuali per il convertitore
Grado di
Manuale
approfondi
mento delle
informazioni
Sommario
Lingue
disponibili
Indirizzo per il download
o numero di ordinazione
inglese,
tedesco,
italiano,
francese,
spagnolo,
cinese
Download:
(http://support.automatio
n.siemens.com/WW/vie
w/it/22339653/133300)
Documentazione su
DVD, numero di
ordinazione
6SL3097-4CA00-0YG0
++
Getting Started Guide
Installazione e messa in
per il convertitore SINAMICS G120 servizio del convertitore.
con Control Unit CU230P-2;
CU240B-2 e CU240E-2
+++
Istruzioni operative
(questo manuale)
+++
Manuale di guida alle funzioni
Safety Integrated
per il convertitore
SINAMICS G120, G120C e G120D
Configurazione di
PROFIsafe.
Installazione delle funzioni
fail-safe del convertitore,
messa in servizio e utilizzo.
inglese,
tedesco
+++
Manuale delle liste
Schemi logici grafici.
per il convertitore SINAMICS G120 Lista completa di parametri,
con Control Unit CU240B-2;
avvisi ed anomalie.
CU240E-2
inglese,
tedesco,
cinese
+
Getting Started Guide
per i seguenti Power Module
SINAMICS G120:
inglese
•
PM240, PM250 e PM260
•
PM240-2
•
PM230
Installazione del Power
Module
+
Istruzioni di installazione
per bobine, filtri e resistenze di
frenatura
Installazione dei componenti
+++
Manuale di installazione
per i seguenti Power Module
SINAMICS G120:
Installazione di Power
Module, bobine e filtri.
+++
•
PM230 IP20
•
PM230 IP55
•
PM240
•
PM240-2
•
PM250
•
PM260
Istruzioni operative
per i seguenti Operator Panel:
•
BOP-2
•
IOP
SINAMICS Manual
Collection
inglese,
tedesco
Manutenzione del Power
Module.
Azionamento Operator
Panel, installazione kit di
montaggio porta per IOP.
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
397
Appendice
A.10 Errori e correzioni
Tabella A- 21 Supporto per la progettazione e la scelta del convertitore
Manuale o tool
Sommario
Lingue
disponibili
Indirizzo per il download o numero di
ordinazione
Catalogo D 31
Dati di ordinazione e
informazioni tecniche per il
convertitore standard
SINAMICS G
inglese,
tedesco,
italiano,
francese,
spagnolo
Informazioni complete su SINAMICS G120
(www.siemens.en/sinamics-g120)
Catalogo online (Industry
Mall)
Dati di ordinazione e
informazioni tecniche per tutti i
prodotti SIEMENS
inglese,
tedesco
SIZER
Lo strumento di progettazione
completo per gli azionamenti
delle famiglie di apparecchiature
SINAMICS, MICROMASTER e
DYNAVERT T, avviatori motore
e controllori SINUMERIK,
SIMOTION e SIMATICTechnology.
inglese,
tedesco,
italiano,
francese
Manuale di progettazione
Selezione di motoriduttori,
inglese,
motori, convertitori e resistenza tedesco
di frenatura sulla base di esempi
di calcolo
SIZER si può acquistare su DVD
(numero di ordinazione: 6SL3070-0AA000AG0)
o in Internet:
Download SIZER
(http://support.automation.siemens.com/W
W/view/fr/10804987/130000)
Manuale di progettazione
(http://support.automation.siemens.com/W
W/view/en/37728795)
Per ulteriori quesiti
Maggiori informazioni sul prodotto e altri tipi di informazioni sono disponibili in Internet al
seguente indirizzo: Product Support
(http://support.automation.siemens.com/WW/view/it/4000024).
Oltre alla documentazione abituale, Siemens mette a disposizione tutte le informazioni
online a questo indirizzo. In particolare sono disponibili:
● Informazioni aggiornate sul prodotto (novità), FAQ (domande frequenti), documentazione
scaricabile.
● La Newsletter fornisce informazioni sempre aggiornate sui prodotti.
● Il Knowledge Manager (ricerca intelligente) aiuta l'utente a trovare la documentazione
necessaria.
● Il Forum è a disposizione di utenti ed esperti di tutto il mondo per lo scambio di idee e di
esperienze.
● La banca dati dei partner di riferimento locali del settore Automation & Drives è
accessibile alla voce "Contatti".
● Informazioni su "Field Service", riparazioni, pezzi di ricambio e maggiori dettagli sono
disponibili alla voce "Servizi".
Convertitori con le Control Unit CU240B-2 e CU240E-2
398
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Appendice
A.10 Errori e correzioni
A.10
Errori e correzioni
Per segnalare eventuali errori riscontrati durante la lettura di questo manuale o per
sottoporre proposte di miglioramento, scrivere al seguente indirizzo postale o mail:
Siemens AG
Drive Technologies
Motion Control Systems
Postfach 3180
D-91050 Erlangen
E-mail (mailto:[email protected])
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
399
Appendice
A.10 Errori e correzioni
Convertitori con le Control Unit CU240B-2 e CU240E-2
400
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Indice analitico
Buffer delle anomalie, 317
A
C
Abilitazione impulsi, 114
Accessori del convertitore, 397
Ampliamento delle funzioni, 266
Anomalia, 311, 317
Motore, 320
Tacitazione, 317, 318
Anomalia del motore, 320
Applicazione
Scrittura e lettura ciclica dei parametri tramite
PROFIBUS, 124
Scrittura e lettura ciclica dei parametri tramite
PROFIBUS e PROFINET, 129
Arresto rapido, 171
Arrotondamento, 192
Arrotondamento OFF3, 192
Ascensore, 233
Assegnazione di più funzioni
Ingressi digitali, 264
Assegnazione in fabbrica, 69
Autotest (dinamizzazione forzata), 261
Avviso, 311, 314
Avvolgitore, 73, 230
Calcolo della temperatura, 210
Canale parametri, 119, 150
IND, 122, 153
Cancellazione impulsi, 114
Caratteristica a 87 Hz, 361
Caso di anomalia, 317
Catalogo, 398
Cavo di rete, 48
Cavo motore, 48
Cavo USB, 35
CDS (Control Data Set), 180, 264
Centrifuga, 220, 222, 225, 230
Certificato di collaudo, 265
Chiusura bus, 51
Chopper di frenatura, 33, 226
Circuiti di disinserzione (dinamizzazione forzata), 261
Classe di soppressione delle interferenze radio, 27
Cliente finale, 394
Codice anomalia, 317
Codice di avviso, 314
Coerenza, 258
Collaudo, 265
Requisiti, 265
Ridotto, 266
Collegamento a stella (Y), 361
Collegamento a triangolo (Δ), 68, 361
Comando del motore, 173
Comando OFF1, 173
Comando ON, 173
Commutazione del set di dati, 264
Commutazione unità, 213
Componenti aggiuntivi, 40
Componenti del convertitore, 21, 295
Componenti per montaggio sovrapposto, 38
Comportamento all'avvio
Ottimizzazione, 199
Compressore, 73
Comunicazione
Aciclica, 125
Ciclica, 111
Comunicazione aciclica, 125
Comunicazione ciclica, 113
Comunicazione diretta, 124, 391
Config HW (configurazione hardware), 376, 379
B
Backup dei dati, 35, 273, 277, 282, 284, 395
Banda escludibile, 98
BF (Bus Fault), 311, 312
Binettori, 373
Blocchi funzione liberi, 249, 252
Blocco, 372
Blocco BICo, 372
Blocco inserzione, 114, 172
Bobina di rete, 28
Bobina di uscita, 29
Boost di tensione, 199, 363
BOP-2
Installazione, 76
Menu, 364
Simboli, 364
Brake Relay, 231
Buchi di commutazione, 28
Buffer degli avvisi, 314
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
401
Indice analitico
Connettori, 373
Controfirme, 395
Control Unit, 21, 22, 296
Controllo a due fili, 173
Controllo a tre fili, 173
Controllo da convertitore, 170
Controllo rottura cavo, 96, 208
Controllo sequenziale, 171
Controllo U/f, 196, 363
Convertitore
Nessuna reazione, 308
Update, 266
Copia
Messa in servizio di serie, 266
Copia parametri (messa in servizio di serie), 266
Coppia di carico, 245
Coppia di spunto, 363
Correzioni manuale, 399
Costruttore, 394
Costruttore della macchina, 265
Cronologia avvisi, 315
Cronologia delle anomalie, 318
Curva caratteristica
Altre, 199
Encoder, 198
Parabolica, 198
Quadratica, 198
Curva caratteristica a 87Hz, 361
Curva caratteristica lineare, 198
Curva caratteristica parabolica, 198
Curva caratteristica quadratica, 198
D
Dati motore, 68
Identificazione, 78, 86, 203, 205
Misurazione, 78
Dati tecnici
Control Unit, 331, 333
Deflussaggio, 361
Descrizione impianto, 394
Descrizione macchina, 394
DI (Digital Input), 92, 264
Dime di foratura, 41, 43
Dimensioni, 41, 43
Dinamizzazione forzata, 261
Dinamizzazione forzata (funzioni di base), 261
DIP switch
Ingresso analogico, 95
Discrepanza, 258
Filtri, 258
Tempo di tolleranza, 258
Disinserzione
Comando OFF1, 171
Comando OFF2, 171
Comando OFF3, 171
Motore, 171
Dispositivo di sicurezza, 393
Dispositivo di sollevamento, 73, 220, 226, 230, 233
Downgrade del firmware, 305
Download, 35, 277, 282, 284
Download manuali, 397
Drive Data Set, DDS, 270
Drive ES Basic, 35, 377
DS 47, 125
E
EMC, 63
EN 61800-5-2, 253
Errore del bus, 312
Errori manuale, 399
Estrusore, 73
Ethernet/IP, 133
F
F-DI (Fail-safe Digital Input), 92
FFC (Flux Current Control), 198
Filtri
Discrepanza, 258
Rimbalzo dei contatti, 259
Test acceso/spento, 259
Filtro di rete, 27
Filtro sinusoidale, 31
Firmware
Update, 266
Formattazione, 274
Frenatura
Generatoria, 230
Frenatura Compound, 225, 226
Frenatura dinamica, 226
Frenatura in corrente continua, 116, 223, 224
Freno di servizio, 220
Freno di stazionamento motore, 220, 230, 232, 233
Funzionalità PLC, 374
Funzionamento, 172
Funzionamento automatico, 180
Funzionamento manuale, 180
Funzione di sicurezza, 170, 296, 301
Funzione JOG, 179
Funzione Trace, 369
Funzioni
Convertitori con le Control Unit CU240B-2 e CU240E-2
402
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Indice analitico
BOP-2, 364
Panoramica, 169
Tecnologiche, 170
Funzioni ampliate, 92
Funzioni di base, 92
Funzioni di frenatura, 220, 221
Funzioni di protezione, 170
G
Generatore di rampa, 188, 191
Getting Started, 397
Grandezze di processo del regolatore PID, 216
Gru, 220, 230, 233
Gruppo di esecuzione, 250
GSD (Generic Station Description), 109, 377
GSDML (Generic Station Description Markup
Language), 106
H
Hotline, 398
I
Impostazioni di fabbrica
Ripristino, 75, 255
IND, 122, 153
Indice pagine, 122, 153
Indice parametri, 122, 153
Industry Mall, 398
Ingressi digitali
Assegnazione di più funzioni,
Ingresso analogico, 52, 53, 70
Funzione, 89, 97, 101
Ingresso binettore, 90
Ingresso di corrente, 95
Ingresso di tensione, 95
Ingresso digitale, 52, 70, 90, 173
fail-safe, 54
Funzione, 89
Ingresso fail-safe, 92
Inserzione
Comando ON, 171
Motore, 171
Inserzione del motore con BOP-2, 364
Installazione, 37
Interblocco, 374
Interconnessione del segnale, 372
Interfacce, 51, 55
Configurazione, 55
Interfacce per bus di campo, 51, 62, 103
Interfacce utente, 51
Interfaccia RS485, 146
Interfaccia USB, 82
Interruttore bimetallico, 207
Interruttore termostatico, 207
Interruzione di rete, 237
Intervalli di tempo, 250
Inversione, 188
Inversione del senso di rotazione, 173
Istruzioni operative, 397
Istruzioni per la manipolazione, 19
IT, 46
K
Kit di collegamento al PC, 35, 254
Kit di collegamento della schermatura, 22, 25
Kit per il montaggio su porta, 35
L
LED
BF, 311, 312
LNK, 312
RDY, 311
SAFE, 312
LED (Light Emitting Diode), 311
Lista di controllo
PROFIBUS, 107
PROFINET, 104, 134
LNK (PROFINET Link), 312
Lunghezza massima dei cavi
PROFIBUS, 108
PROFINET, 105
Lunghezza massima del cavo
Modbus, 158
USS, 147
M
Manual Collection, 397
Manuale delle liste, 397
Manuale di guida alle funzioni Safety Integrated, 393,
397
Manuale di installazione, 397
Menu
BOP-2, 364
Operator Panel, 364
Messa in servizio
Accessori, 35
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
403
Indice analitico
Linee guida, 67
Messa in servizio di base, 55
Messa in servizio di serie, 35, 266, 273
Messa in servizio:
Panoramica, 20
Metodo di frenatura, 220, 222
MLFB (numero di ordinazione), 394
MMC (scheda di memoria), 274
Modifica dei parametri (STARTER), 368
Modo operativo, 394
Montaggio, 37, 40
MOP (potenziometro motore), 184
Morsetti di comando, 69
Morsettiera, 52, 61, 89
Impostazione di fabbrica, 69
MotID (identificazione dati motore), 78
N
Nastro trasportatore, 222
Nastro trasportatore obliquo, 73, 220, 226, 230
Nastro trasportatore orizzontale, 73, 225, 226, 230
Nastro trasportatore verticale, 73, 226, 230
Norma motori, 215
Normazione
Bus di campo, 384
Ingresso analogico, 95
Uscita analogica, 99
Norme (EN 60950), 46
Numero del parametro, 122
Numero di giri
Limitazione, 188
Modifica con BOP-2, 364
Numero di giri massimo, 74, 188, 190, 363
Numero di giri minimo, 74, 188, 189, 363
Numero di ordinazione, 21
Numero di serie, 394
Numero parametro, 366
O
Object-Manager STEP 7, 377
Operator Panel
BOP-2, 35, 364
Handheld, 35
Installazione, 76
IOP, 35
Kit per il montaggio su porta, 35
Menu, 364
Ora di anomalia, 317
comparsa, 317
rimozione, 317
Ora di avviso, 314
P
p0015, configurazione macro interfacce, 55
Panoramica degli stati, 171
Panoramica dei manuali, 397
Panoramica delle funzioni, 169
Parametri di impostazione, 362
Parametri di supervisione, 362
Parola di comando, 113, 116
Parola di comando 1, 113
Parola di comando 3, 116
Parola di stato, 113, 116
Parola di stato 1, 115
Parola di stato 3, 117
Password, 255
PELV, 331, 333
Perdita di carico, 247
Persona autorizzata, 265
PFH (Probability of failure per hour), 334
Pompa, 24, 73, 85, 230
Possibilità di recupero energia, 230
Potenza generatoria, 220
Potenziometro motore, 184
Power Module, 21
Power On Reset, 75, 255, 263, 297, 298
Preimpostazioni, 71
Preparazione del valore di riferimento, 170, 188
Procedura, 19
PROFIBUS, 107
PROFIenergy, 130
Profilo AC/DC Drive, 135
PROFINET, 104
PROFIsafe, 103, 378
Programma PLC, 395
Pronto al funzionamento, 172
Pronto all'inserzione, 172
Protezione antistallo, 245, 246
Protezione contro il blocco, 245, 246
Protezione da sovratensione, 28
Protezione in scrittura, 286, 288
Protezione know-how, 286, 289
Pulsante di arresto di emergenza, 253
Q
Quesiti, 398
Convertitori con le Control Unit CU240B-2 e CU240E-2
404
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
Indice analitico
R
Rampa di accelerazione, 363
Rampa di decelerazione, 363
RDY (Ready), 311
Recupero in rete, 25, 230
Regolatore di corrente max., 210
Regolatore I-max, 210
Regolatore PID, 116, 216, 241, 242
Regolazione del livello di riempimento, 241
Regolazione del numero di giri, 201
Regolazione della coppia, 205
Regolazione di portata, 241
Regolazione di pressione, 241
Regolazione motore, 170
Regolazione vettoriale, 363
Senza encoder, 201
Regolazione vettoriale, 363
Regolazione vettoriale, 363
Reinserzione automatica, 237
Resistenza di frenatura, 33, 226
Rettificatrice, 220, 222, 225
Riavviamento al volo, 236, 237
Riconoscimento errori, 261
Rimbalzo dei contatti, 259
Ripristino
Parametri, 75, 255
Rischi residui di sistemi di azionamento, 17
Rotazione destrorsa, 173
Rotazione sinistrorsa, 173
Rottura conduttore, 258
Runtime di sistema, 313
S
SAFE, 312
Safe Brake Relay, 261
Scambio di dati bus di campo, 384
Scheda MMC, 35
Schema elettrico, 395
Scostamento del numero di giri, 247
SD (scheda di memoria), 35, 274
Formattazione, 274
MMC, 274
Sega, 222, 225
Segnalazioni di stato, 170
Segnali coerenti, 258
Segnali di test, 259
Senso di rotazione, 188
Sensore (elettromeccanico), 393
Sensore di temperatura, 52, 53, 54, 70
Sensore di temperatura del motore, 52, 53, 70, 209
Sensore elettromeccanico, 393
Sensore KTY84, 207
Sensore PTC, 207
Sequenza di esecuzione, 250
Set di dati 47 (DS), 125, 389
Set di dati di azionamento, 270
Set di dati di comando, 180
SIMATIC, 376, 377, 379
Simboli, 19
Sistema di unità, 216
Sistemi di distribuzione della corrente, 46
SIZER, 398
Sorgente del valore di riferimento, 170
Selezione, 183, 184, 362
Sorgente di comando, 170
Selezione, 362
Sorveglianza cortocircuito, 208
Sorveglianza del funzionamento a vuoto, 245, 246
Sorveglianza del numero di giri, 247
Sorveglianza della coppia
In funzione del numero di giri, 245, 246
Sorveglianza della temperatura, 206, 210
Sorveglianza I2t, 206
Sostituzione
Control Unit, 266
Hardware, 266
Motore, 266
Power Module, 266
Riduttore, 266
Sottoindice, 122, 153
Sovraccarico, 210, 363
Sovratensione, 211
Sovratensione del circuito intermedio, 211
STARTER, 35, 81, 84, 254, 282, 368
Download, 36
Stati dei segnali, 311
STO (Safe Torque Off), 253, 254
Selezione, 254
Test di collaudo, 269
Stop di prova (dinamizzazione forzata), 261
STW1 (parola di comando 1), 113
STW3 (parola di comando 3), 116
Suggerimenti per il manuale, 399
Supporto, 398
Supporto di memorizzazione, 273
Supporto per la progettazione, 398
Svolgitore, 230
T
Tabella delle funzioni, 394
Targhetta identificativa
Convertitori con le Control Unit CU240B-2 e CU240E-2
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD
405
Indice analitico
Control Unit, 21
Power Module, 21
Tastatore di misura, 248
Tecnica dei trasporti industriali, 85
Telegramma
Ampliamento, 118
Inserimento, 106, 110
Temperatura ambiente, 68, 210
Temperatura motore, 210
Tempo di accelerazione, 74, 192, 194, 363
Scalatura, 195
Tempo di decelerazione, 74, 192, 194, 363
Scalatura, 195
Tempo di decelerazione OFF3, 192
Tensione del circuito intermedio, 211
Test a pattern di bit, 259
Test acceso/spento, 259
Test di collaudo
Grado di approfondimento della prova, 266
Persona autorizzata, 265
Presupposti, 265
STO, 269
Tipi di parametri, 362
Tipi di telegramma, 377
Tipo di regolazione, 363
TN-C, 46
TN-C-S, 46
TN-S, 46
Tool di messa in servizio STARTER, 254
Tool per PC STARTER, 254
Traffico dati aciclico, 125
Trasferimento dati, 277, 282, 284
TT, 46
Valore parametro, 125, 367
Ventilatore, 24, 73, 85
Ventilatori, 220, 230
Versione
Control Unit, 21
Firmware, 394
Funzione di sicurezza, 394
Hardware, 394
Power Module, 21
Versione firmware, 362, 394
Visualizzazione del risparmio energetico, 218
Z
ZSW1 (parola di stato 1), 115
ZSW3 (parola di stato 3), 117
U
Unità di uscita digitale F, 393
Update (firmware), 266
Upgrade del firmware, 303
Upload, 35, 275, 282, 284
Uscita analogica, 52, 53, 70
Funzione, 89, 101
Uscita digitale, 52, 70
Funzione, 89, 93
USS (interfaccia seriale universale), 147, 150
Utilizzo conforme alle prescrizioni, 15
V
Valore anomalia, 317
Valore di avviso, 314
Convertitori con le Control Unit CU240B-2 e CU240E-2
406
Istruzioni operative, 01/2013, FW V4.6, A5E02299792D AD