L−force Communication
Ä.K>0ä
EDSETHIND
.K>0
Manuale di comunicazione
Ethernet
Ethernet nelle applicazioni industriali
i
Sommario
1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
2
Nozioni di base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2.1
Determinismo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2.2
Jitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2.3
Tempo di ciclo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2.4
Switched Ethernet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.5
Procedura con assegnazione di time slot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.6
Sincronizzazione di clock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.7
Porte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2.8
Hub o switch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2.9
Indirizzamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9.1
Esempio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9.2
Classi di reti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9.3
Indirizzi IP riservati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9.4
Assegnazione dell’indirizzo IP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
8
8
9
9
Varianti della tecnologia "Industrial Ethernet" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
3.1
Ethernet/IP (CIP Sync) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1
Principio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.2
Architettura di rete / Topologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
10
10
3.2
EtherCAT® . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1
Principio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2
Architettura di rete / Topologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
11
12
3.3
PROFINET® . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1
Principio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.2
Architettura di rete / Topologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
13
14
3.4
Ethernet POWERLINK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1
Principio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.2
Architettura di rete / Topologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
15
16
3.5
SERCOS III . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.1
Principio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.2
Architettura di rete / Topologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
17
17
3
2
EDSETHIND IT 3.1
Introduzione
1
0Fig. 0Tab. 0
1
Introduzione
Il sistema di rete Ethernet, che ha avuto origine nell’ambiente di ufficio, viene ora sempre
più utilizzato anche in ambito industriale. Si tende ormai a dotare tutti i dispositivi di rete
di un collegamento Ethernet e si ricorre sempre meno al classico bus di campo. I livelli di
ufficio e di campo crescono sempre più in correlazione tra loro.
Oltre all’ambito di applicazione, cambiano anche i requisiti della rete Ethernet. Mentre
nell’ambiente di ufficio si trasferiscono prevalentemente grosse quantità di dati tra PC, la
comunicazione tra dispositivi di campo è essenzialmente costituita da telegrammi molto
brevi. Di conseguenza, a livello di campo sono richiesti tempi di risposta molto rapidi,
nonché altamente deterministici ( 4) − requisiti che la "normale" Ethernet non è in grado
di soddisfare. Queste mutate esigenze hanno inoltre portato allo sviluppo di diversi
protocolli per l’hardware Ethernet che a volte prevedono una separazione tra le linee
Ethernet in tempo reale e le normali reti Ethernet.
In particolare, i moduli di comunicazione sviluppati da Lenze rispondono ai requisiti dei
seguenti protocolli Ethernet:
ƒ
Ethernet
ƒ
Ethernet POWERLINK
ƒ
PROFINET®
ƒ
EtherCAT®
ƒ
EtherNet/IP
Nella sezione seguente vengono brevemente spiegati i meccanismi fondamentali di
Ethernet, con una panoramica delle differenze tra i diversi protocolli Ethernet e
informazioni sull’architettura della rete Ethernet.
EDSETHIND IT 3.1
3
2
Nozioni di base
Determinismo
2
Nozioni di base
All’inizio degli anni ’70 presso lo "Xerox Palo Alto Research Center" si iniziò a pensare a
come fare in modo che diversi impiegati potessero condividere l’uso di una stampante,
finché nel 1983 fu presentato il primo standard Ethernet (IEEE802.3). Da allora si è
continuato a svilupparlo e migliorarlo e ancora oggi nel protocollo Ethernet sono presenti
alcuni dei meccanismi originari, che tuttavia ne rendono difficoltoso l’impiego in ambiti al
di fuori dell’ufficio, in particolare il problema delle collisioni.
Diverse organizzazioni hanno nel frattempo avviato attività di sviluppo per rendere
possibile l’utilizzo dello standard Ethernet anche in campo industriale, con la redazione di
diverse specifiche in concorrenza tra loro. Le più importanti vengono brevemente illustrate
nelle sezioni seguenti, in particolare il sistema bus di campo tra cui EtherCAT, promosso da
Lenze. Di seguito viene fornita la spiegazione di alcuni concetti chiave, mentre più avanti
sono illustrati in sintesi i diversi sistemi, con presentazione di vantaggi e svantaggi.
2.1
Determinismo
Si parla di determinismo quando un sistema si sviluppa nel tempo strettamente secondo
determinate regole. In riferimento alla tecnologia di comunicazione, ciò significa la
possibilità di determinare con precisione il momento in cui un valore viene trasmesso da
un nodo a un altro.
Le collisioni di telegrammi sono il problema principale per l’Ethernet in tempo reale. Ciò
avviene quando 2 nodi vogliono trasmettere simultaneamente. I controller Ethernet
rilevano in questo caso una collisione ed interrompono la trasmissione. Quindi, secondo
una procedura con una componente casuale (CSMA/CD), cercano di ripetere l’invio.
Nell’Ethernet standard non è pertanto possibile alcun determinismo.
2.2
Jitter
Tra l’attivazione di un segnale e il momento nel quale il destinatario reagisce sussiste un
certo ritardo. Se tale intervallo di ritardo non è costante si parla di "jitter". Nei sistemi di
"Motion Control" i valori attesi sono comunque inferiori a 1 ms.
2.3
Tempo di ciclo
Per ciclo (di comunicazione) si intende il tempo necessario per l’invio di un nuovo valore di
riferimento a tutti i nodi che partecipano alla comunicazione e per la lettura del valore
istantaneo attuale da tutti i nodi. Il tempo di ciclo più breve possibile dipende quindi
sempre dal numero di nodi nel bus.
4
EDSETHIND IT 3.1
Nozioni di base
2
Switched Ethernet
2.4
Switched Ethernet
Nell’Ethernet originaria, tutti i nodi erano collegati a un cavo. In questo caso, se più nodi
inviavano contemporaneamente dei dati si verificavano delle collisioni. Con l’evoluzione
del protocollo Ethernet furono quindi inseriti gli hub (accoppiatori a stella). Tra nodi e hub
è presente un collegamento punto−punto. L’hub connette tutti i nodi tra loro senza ritardi,
ed è quindi molto veloce, tuttavia possono comunque verificarsi delle collisioni. Questo
problema viene risolto con una nuova generazione di accoppiatori a stella (switch), che
inoltrano i messaggi solo in modo mirato ai dispositivi e se necessario li trattengono.
2.5
ƒ
Vantaggio: non sono più possibili collisioni.
ƒ
Svantaggio: gli switch ritardano l’invio dei messaggi. Il tempo di ritardo dipende dal
carico sulla rete. Non è quindi possibile parlare in questo caso di "real time".
Procedura con assegnazione di time slot
Al protocollo Ethernet non deterministico viene sovraordinata una procedura con
assegnazione di un time slot, ovvero di un intervallo di tempo specifico. Nell’ambito
dell’intero ciclo, ciascun nodo "comunica" solo quando è attivo il proprio time slot. In tal
modo si evitano le collisioni che comprometterebbero il determinismo.
2.6
ƒ
Vantaggio: possibilità di completo controllo del determinismo.
ƒ
Svantaggio: tutti i nodi che si trovano sullo stesso segmento della rete devono
conoscere la procedura sovraordinata con assegnazione di time slot. Basta un nodo
non conforme per disturbare il determinismo.
Sincronizzazione di clock
Ciascun dispositivo sul bus possiede un orologio interno (clock). Tramite uno speciale
protocollo di sincronizzazione (IEEE1588) viene assicurato che tutti gli orologi funzionino
in modo sincronizzato e che pertanto determinate azioni vengano eseguite da tutti i nodi
nello stesso momento.
EDSETHIND IT 3.1
ƒ
Vantaggio: il determinismo è possibile tramite Ethernet standard.
ƒ
Svantaggio: è richiesto un hardware particolare (con orologio interno) anche per gli
switch. Inoltre è possibile controllare solo gli eventi ciclici in tempo reale.
5
2
Nozioni di base
Porte
2.7
Porte
Un nodo Ethernet può offrire diversi programmi (servizi server) contemporaneamente in
rete. Ciascun servizio è "in ascolto" su una porta. I client, cioè gli altri dispositivi Ethernet,
possono così richiedere un determinato servizio. La maggior parte dei servizi può essere
fornita a più client contemporaneamente.
Esempi
Servizio server
Porta
Multi−client
Web (HTTP)
80
Sì
E−mail (SMTP)
25
Sì
DNS
53
Sì
Abilitazione file (SMB)
445
Sì
Per motivi di sicurezza, alcuni router, firewall e altri componenti dell’infrastruttura non
consentono l’accesso a tutte le porte possibili. È quindi necessario sapere quali porte sono
necessarie per la comunicazione con un nodo Ethernet.
2.8
Hub o switch
Il cablaggio dei sistemi Ethernet è oggi prevalentemente a stella. Normalmente, due nodi
non sono collegati direttamente tra loro, ma tramite un distributore a stella. Esistono due
tipi di distributori a stella: hub e switch. Mentre in passato gli hub erano lo standard per
l’ambiente di ufficio, oggi si stanno diffondendo anche in questo ambito gli switch,
offrendo il vantaggio di poter collegare in serie un numero praticamente illimitato di
switch e di costruire così strutture di rete ad albero. Uno switch riceve i telegrammi e decide
su quale porta di commutazione dovrà inoltrarli. La comunicazione tra i nodi Ethernet
avviene quindi sempre in assenza di collisioni. Se più nodi interagiscono con lo stesso
switch contemporaneamente, quest’ultimo memorizza temporaneamente i messaggi e li
invia quindi successivamente. Ciò comporta dei tempi di ritardo, che rendono critico l’uso
degli switch in applicazioni in tempo reale.
Gli hub possono essere collegati in serie l’uno all’altro solo in misura limitata, poiché
quando sono collegati in serie più di due hub, il rilevamento collisioni CSMA/CD non
funziona più. Un chiaro vantaggio offerto dagli hub è però il tempo di ritardo
estremamente ridotto rispetto agli switch, dato che i telegrammi vengono ripetuti ed
inviati su ciascuna porta, senza essere interpretati. Per questo motivo, è preferibile
utilizzare hub in reti per applicazioni in tempo reale. Con l’ausilio di un protocollo
aggiuntivo, quale Ethernet POWERLINK, per prevenire le collisioni, gli hub rappresentano
l’alternativa migliore per il livello di campo.
6
EDSETHIND IT 3.1
Nozioni di base
2
Indirizzamento
2.9
Indirizzamento
Ogni nodo Ethernet ha un indirizzo MAC. L’indirizzo MAC è un indirizzo fisico assegnato a
un dispositivo Ethernet al momento della produzione e non può essere modificato. È un
indirizzo univoco a livello mondiale e non possono esservi due dispositivi con lo stesso
indirizzo MAC. Spesso tale indirizzo è stampato sulla parte esterna del dispositivo. Questo
indirizzo univoco consente l’interazione con il dispositivo, indipendentemente dagli altri
dispositivi Ethernet collegati al bus. Non può verificarsi alcun conflitto di indirizzo.
L’indirizzo MAC viene rappresentato tramite 6 byte. In tal modo esistono 248, cioè circa 280
miliardi di indirizzi MAC diversi, che permettono di identificare in modo univoco ciascun
dispositivo Ethernet. La rappresentazione avviene generalmente nel formato
esadecimale, dove i singoli byte sono divisi da punti. I primi tre byte identificano il
costruttore, mentre i restanti byte servono per l’identificazione del dispositivo. Esempio:
00.0A.86.00.00.0A (il codice costruttore per Lenze è 00.0A.86).
Poiché ogni sostituzione di un dispositivo comporta la modifica dell’indirizzo MAC, viene
eseguito anche l’indirizzamento logico tramite l’indirizzo IP. Ciascun nodo della rete riceve
quindi un indirizzo IP, che deve essere univoco nell’ambito della rete. Si tratta di un
indirizzo "logico", che può essere modificato tramite software. Questo indirizzo è
composto da 32 bit e per agevolarne la lettura viene utilizzato sempre il formato con 4
numeri decimali separati da un punto ("dot notation", ovvero notazione con punti).
L’indirizzo IP è composto dal Net ID e dall’Host ID. Il Net ID specifica il segmento di rete,
mentre l’Host ID identifica il nodo. La suddivisione dei 32 bit tra Net ID e Host ID dipende
dalla classe dell’indirizzo IP. Il tipo di classe è indicato nel primo byte.
Solo i nodi che si trovano nello stesso segmento di rete (sottorete) possono comunicare
direttamente tra loro. Se i nodi si trovano su segmenti diversi è necessario disporre di un
router per lo smistamento dei telegrammi ai segmenti di destinazione. La grandezza
massima di un segmento di rete dipende dalla lunghezza del Net ID. Con l’ausilio della
maschera di rete sono poi possibili ulteriori suddivisioni.
EDSETHIND IT 3.1
7
2
Nozioni di base
Indirizzamento
Esempio
2.9.1
Esempio
L’indirizzo IP è 192.168.10.1
La maschera di rete è 255.255.255.0
Indirizzo IP
Maschera di rete
192
168
10
1
11000000
10101000
00001010
00000001
255
255
255
0
11111111
11111111
11111111
00000000
Descrizione dell’esempio:
Tutti i nodi che vogliono comunicare con il dispositivo di esempio devono avere anch’essi
un indirizzo che inizia per 192.168.10. Solo l’ultimo byte dell’indirizzo IP deve essere
diverso. In caso contrario, per la comunicazione è necessario un router. L’indirizzo IP del
router viene indicato come gateway standard.
I router (gateway) trasmettono pacchetti tra reti diverse. Un sistema conosce solo la
propria rete ed invia quindi ad un router tutti i pacchetti destinati a sistemi in altre reti. Un
sistema conosce inoltre solo determinati percorsi: "per la rete X, inviare al router Y". I
pacchetti per tutte le altre reti sconosciute vengono inviate al gateway standard (gateway
di default). Il routing, o instradamento, deve funzionare anche in senso inverso, altrimenti
non si riceve alcuna risposta.
2.9.2
8
Classi di reti
ƒ
Classe A
– Indirizzi da 1.x.x.x a 126.x.x.x
– Maschera di rete 255.0.0.0
– Consente 126 reti, ciascuna con massimo 16 milioni di host.
ƒ
Classe B
– Indirizzi da 128.0.x.x a 191.255.x.x
– Maschera di rete 255.255.0.0
– Consente 16000 reti, ciascun con massimo 16000 host.
ƒ
Classe
– Indirizzi da 192.0.0.x a 223.255.255.x
– Maschera di rete 255.255.255.0
– Consente 2 milioni di reti, ciascuna con massimo 254 host.
ƒ
Subnetting: maschere di rete più lunghe di quanto consentito dalla classe.
EDSETHIND IT 3.1
Nozioni di base
2
Indirizzamento
Indirizzi IP riservati
2.9.3
Indirizzi IP riservati
ƒ
127.0.0.1, "local host"
Con questo indirizzo un nodo può comunicare solo con se stesso.
ƒ
xxx.xxx.xxx.0, identificatore per il segmento di rete
Non può essere utilizzato come indirizzo di nodo.
ƒ
xxx.xxx.xxx.255, "broadcast"
Comunicazione con tutti i nodi di una rete.
Determinati intervalli di indirizzi sono riservati per reti private e non possono essere
utilizzati in Internet:
2.9.4
ƒ
10.0.0.0 ... 10.255.255.255
ƒ
172.16.0.0 ... 172.31.255.255
ƒ
192.168.0.0 ... 192.168.255.255
Assegnazione dell’indirizzo IP
In linea di principio vale quanto segue: se un dispositivo Ethernet deve essere collegato a
una rete esistente, è necessario contattare l’amministratore di rete, che provvederà ad
assegnare un indirizzo IP. Inoltre, occorre decidere se il dispositivo può essere collegato
direttamente alla rete, oppure se sono necessarie misure di protezione, quali firewall.
Non è possibile utilizzare qualsiasi indirizzo.
L’indirizzo infatti deve essere idoneo per la rete esistente e non può essere doppio.
Per l’impostazione dell’indirizzo IP esistono diversi meccanismi. In campo industriale, nella
maggior parte dei casi gli indirizzi IP vengono assegnati in modo fisso. Nell’ambiente di
ufficio, si utilizzano spesso server DHCP, che assegnano dinamicamente un indirizzo a
ciascun dispositivo all’avvio. Questa procedura è tuttavia poco utilizzata in ambito
industriale.
Quando un PC vuole comunicare tramite il protocollo IP con un dispositivo di campo, è
necessario prima procedere con l’impostazione degli indirizzi IP. Prima occorre verificare
l’indirizzo IP del dispositivo di campo o impostare l’indirizzo desiderato. Quindi si dovrà
assicurare che il PC possieda un indirizzo IP nella stessa sottorete o che sia presente un
router nella rete, per l’inoltro dei telegrammi da un segmento della rete a un altro. In alcuni
casi occorre eseguire specifiche impostazioni nel pannello di controllo del PC. A tal fine
mettersi in contatto con l’amministratore di sistema.
EDSETHIND IT 3.1
9
3
Varianti della tecnologia "Industrial Ethernet"
Ethernet/IP (CIP Sync)
Principio
3
Varianti della tecnologia "Industrial Ethernet"
3.1
Ethernet/IP (CIP Sync)
Ethernet/IP è stato elaborato dal gruppo di utenti "Open DeviceNet Vendor Association"
(ODVA), di cui Rockwell è il principale esponente. L’IP in questo caso rappresenta
l’estensione del protocollo industriale CIP (Common Industrial Protocol), che fornisce il
layer applicativo. Il CIP viene utilizzato anche come layer applicativo per DeviceNet e
ControlNet ed è definito congiuntamente da ODVA e "ControlNet International". Questo
protocollo è stato ampliato con funzioni di sincronizzazione per applicazioni in tempo
reale e viene quindi chiamato "CIP Sync".
Principali caratteristiche dichiarate:
3.1.1
ƒ
Vengono utilizzati solo standard (IEEE 802.3, IEEE 1588)
ƒ
Sono richiesti switch speciali (con "boundary clock" per la sincronizzazione degli
orologi)
ƒ
Possibilità di combinazione con componenti Ethernet standard
ƒ
Tecnologia di sicurezza tramite CIP
ƒ
"Safety" possibile.
Principio
Il principio della funzionalità in tempo reale (real time) si basa sul fatto che ciascun nodo
Ethernet possiede un orologio interno ad alta precisione. Tutti gli orologi vengono
costantemente risincronizzati tramite un protocollo predefinito (IEEE 1588), in modo da
assicurare il funzionamento sincrono di tutti gli orologi del sistema. I pacchetti di dati,
inoltre, devono essere prioritizzati. È comunque possibile controllare soltanto eventi ciclici
in real time.
Per ulteriori informazioni su Ethernet/IP (CIP Sync), vedere ...
ƒ in Internet all’indirizzo www.odva.org .
3.1.2
Architettura di rete / Topologia
Ethernet/IP consente le topologie tipiche dell’ambiente Ethernet, quali le topologie a stella
e ad albero. Come componenti dell’infrastruttura è necessario installare degli switch
speciali con "boundary clock". È possibile utilizzare gli strumenti standard per l’analisi della
rete.
10
EDSETHIND IT 3.1
Varianti della tecnologia "Industrial Ethernet"
3
EtherCAT®
Principio
3.2
EtherCAT®
EtherCAT® è un marchio registrato, la tecnologia è brevettata ed è concessa in licenza da
Beckhoff Automation GmbH, Germania.
È stato costituito un gruppo di utenti, chiamato "EtherCAT Technology Group" (ETG), al
quale è possibile aderire gratuitamente, alla sola condizione di mettere a disposizione il
proprio logo aziendale. Questo gruppo di utenti ed i relativi "membri" non detengono,
tuttavia, alcun diritto legale su questo sistema.
Principali caratteristiche dichiarate da Beckhoff:
ƒ
Completa compatibilità con Ethernet
ƒ
Comunicazione completamente integrata nell’hardware; massime prestazioni
ƒ
Protocollo con un alto livello di efficienza
ƒ
Utilizzo di schede Ethernet standard
ƒ
Topologia liberamente selezionabile
ƒ
Possibilità di multiplexing di dati in tempo reale con TCP/IP standard
ƒ
Ethernet come backplane.
Il punto di forza di questo sistema è il suo utilizzo come sistema backplane per i morsetti.
Viene offerto in due diverse varianti fisiche: E−bus e Ethernet.
Il sistema E−bus, basato sui segnali differenziali di tensione (LVDS), è idoneo solo per brevi
tratti (<10 m, ad es. all’interno di una morsettiera) e non assicura alcun isolamento
galvanico. Il vantaggio rispetto alla variante Ethernet è la maggiore rapidità in termini di
tempo di transito. Per l’utilizzo effettivo di Ethernet (connettore standard, collegamento
ad altri dispositivi Ethernet, ecc.) è necessario utilizzare la variante fisica Ethernet.
3.2.1
Principio
I dati vengono rilevati e/o inseriti al runtime del telegramma Ethernet ("principio
Interbus").
Per ulteriori informazioni su EtherCAT, vedere ...
ƒ in Internet all’indirizzo www.ethercat.org .
EDSETHIND IT 3.1
11
3
Varianti della tecnologia "Industrial Ethernet"
EtherCAT®
Architettura di rete / Topologia
3.2.2
Architettura di rete / Topologia
La topologia di un sistema EtherCAT è in linea di principio liberamente selezionabile.
Generalmente viene utilizzata una struttura lineare, anche se di fatto si realizza
implicitamente sempre un anello. Le diramazioni sono possibili tramite un accoppiatore
I/O. La topologia a stella può essere realizzata solo se il PLC è già dotato di un numero
sufficiente di collegamenti Ethernet (ovvero, schede di rete in un PC). Non è possibile
utilizzare switch standard per creare una struttura a stella. Le strutture ad albero sono
possibili mediante l’uso di morsetti I/O con linea derivata, anche se sussistono delle
limitazioni nella realizzazione di tali strutture ad albero. Gli switch sono consentiti solo tra
il master e il primo nodo EtherCAT. I componenti Ethernet standard possono quindi essere
collegati a questo switch, oppure a speciali morsetti sulla porta di commutazione. La
comunicazione tra i componenti standard e i dispositivi EtherCAT non è mai diretta, ma
avviene sempre tramite il cosiddetto "virtual switch" nel PLC, quindi attraverso un
percorso più lungo che penalizza il tempo di esecuzione e rappresenta un collo di bottiglia.
Per l’analisi della rete sono richiesti dispositivi di analisi speciali, poiché il flusso di dati
dipende dal punto di misurazione.
12
EDSETHIND IT 3.1
Varianti della tecnologia "Industrial Ethernet"
3
PROFINET®
Principio
3.3
PROFINET®
PROFINET® è definito dall’organizzazione degli utenti di PROFIBUS & PROFINET
International (PI). PROFINET® rappresenta la logica successione a PROFIBUS®.
Viene operata una distinzione tra il modello di componenti PROFINET (CBA, V1), il cui
principale obiettivo è l’interconnessione dei componenti di automazione, e il PROFINET
I/O, che corrisponde all’evoluzione del PROFIBUS. La comunicazione nel modello di
componenti è basata sul protocollo TCP/IP standard, non è real time e pertanto non
pertinente per quest’analisi. Nel caso di PROFINET I/O è necessario fare un’ulteriore
differenziazione. Esiste infatti una variante con capacità real time, tuttavia con dati
prestazionali non adatti per applicazioni di Motion Control. Viene definita SRT (Soft Real
Time, V2) e in linea di principio può essere implementata su qualsiasi controller che
supporti Ethernet. Le prestazioni raggiunte corrispondono approssimativamente a quelle
dello standard PROFIBUS. Esiste poi la variante IRT (Isochronous Real Time, V3), che è
l’unica indicata per le applicazioni di "Motion Control". Per realizzare questa variante è
necessario utilizzare speciali chip (ASIC) di concezione Siemens.
Principali caratteristiche dichiarate:
3.3.1
ƒ
Utilizzo contemporaneo della comunicazione IT real time e basata su TCP su un
unico cavo
ƒ
Protocollo unico tra i componenti e tra sistema di controllo e dispositivo di campo
ƒ
Comunicazione scalare.
Principio
ƒ
Soft Real Time (SRT):
– Switched Ethernet per la prevenzione delle collisioni
– Ottimizzazione dello stack di protocollo TCP/IP
– Lunghezza dei telegrammi ridotta e tempi di trasmissione abbreviati
– Prioritizzazione dei pacchetti di dati secondo IEEE 802.1Q (Prio 6)
ƒ
Isochronous Real Time (IRT):
– Procedura con assegnazione di time slot: il ciclo di comunicazione è diviso in una
parte deterministica (real time) e in una parte aperta (Ethernet standard)
– Realizzazione su base hardware (speciali ASIC)
– Sincronizzazione del ciclo e assegnazione dei time slot realizzata via hardware
Per ulteriori informazioni su PROFINET, vedere ...
ƒ in Internet all’indirizzo www.profibus.com .
EDSETHIND IT 3.1
13
3
Varianti della tecnologia "Industrial Ethernet"
PROFINET®
Architettura di rete / Topologia
3.3.2
Architettura di rete / Topologia
La topologia di una rete PROFINET è in linea di principio liberamente selezionabile. Come
accoppiatori a stella è possibile utilizzare degli switch. In PROFINET SRT (V2) questi switch
devono supportare la prioritizzazione dei pacchetti di dati secondo IEEE802.1Q. In
PROFINET IRT (V3) è possibile utilizzare solo switch speciali, che contengono l’ASIC
PROFINET di Siemens. In questo caso a tutt’oggi sono utilizzabili solo switch a 4 porte.
Con l’ausilio di switch integrati nei dispositivi di campo è possibile realizzare strutture
lineari.
Per l’analisi della rete con PROFINET IRT (V3) sono richiesti dispositivi di analisi speciali,
poiché il flusso di dati dipende dal punto di misurazione.
14
EDSETHIND IT 3.1
Varianti della tecnologia "Industrial Ethernet"
3
Ethernet POWERLINK
Principio
3.4
Ethernet POWERLINK
Ethernet POWERLINK è un sistema Ethernet Real−Time. Originariamente concepito dalla
ditta B&R (versione 1.0), questo sistema è stato quindi reso pubblico e ulteriormente
sviluppato attraverso l’Ethernet POWERLINK Standardisation Group (EPSG). Le attività
svolte da questo gruppo hanno portato alla costituzione di uno standard industriale
riconosciuto (versione 2.0), che coniuga in modo ottimale le caratteristiche tecniche
dell’Ethernet con le esigenze di operatività in tempo reale e di integrazione.
3.4.1
Principio
Ethernet POWERLINK evita le collisioni grazie a un processo software sovraordinato, lo
"Slot Communication Network Management". Si tratta di una procedura con
assegnazione di time slot in base alla quale il master (Managing Node) attribuisce
esplicitamente ad ogni slave (Controlled Node) il diritto di trasmettere attivamente. La
ricezione è sempre possibile ad opera di tutti i nodi.
Confronto con CAN: nel sistema CAN è presente anche un master che stabilisce l’inizio di
un nuovo ciclo. L’assegnazione dei nodi viene tuttavia regolata in modo automatico
tramite funzioni CAN.
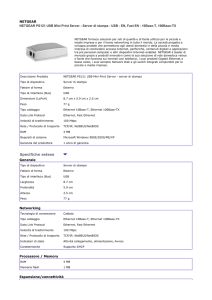
In ogni ciclo è possibile trasmettere anche un telegramma non real−time (a). Si possono così
spedire diversi telegrammi Ethernet (ad es. telegrammi TCP/IP generici). Anche per questi
telegrammi il master (Managing Node) conferisce esplicitamente ad uno slave (Controlled
Node) il diritto di trasmissione.
i
1
2
3
4
i+1
5
n
a
1
2
3
4
5
t
E94YCEP014
i
1 ... n
a
Ciclo
Trasferimento dati ciclico (HRT) per nodo 1 ... n
Trasferimento dati aciclico (ad es. TCP/IP)
Per ulteriori informazioni su Ethernet POWERLINK, vedere ...
ƒ in Internet all’indirizzo www.ethernet−powerlink.org .
ƒ nella brochure "Real Time Industrial Ethernet is Reality".
EDSETHIND IT 3.1
15
3
Varianti della tecnologia "Industrial Ethernet"
Ethernet POWERLINK
Architettura di rete / Topologia
3.4.2
Architettura di rete / Topologia
I vantaggi di una comunicazione universale, resa possibile mediante l’uso di cavi e
standard unificati, sono chiari. Ma questo sistema consente anche di abbattere la
separazione finora presente tra il livello di ufficio e il livello di campo. Tuttavia, anche nelle
reti Ethernet, non è opportuno eliminare totalmente qualsiasi strutturazione, per i
seguenti motivi:
ƒ
Sicurezza e protezione degli accessi
ƒ
Creazione di segmenti di rete
ƒ
Necessità di segmentazione determinata dai sistemi.
La segmentazione di una rete è quindi raccomandabile in ogni caso. Non è necessario che
ogni nodo comunichi costantemente con qualsiasi altro nodo. Raggruppando in un
segmento di rete i nodi che devono essere costantemente in comunicazione tra loro, è
possibile separare gli altri tratti della rete da questo carico sul bus.
In una rete aziendale estesa, generalmente viene operata una separazione tra il livello di
ufficio e il livello di campo, anche se si utilizza lo stesso sistema bus. Esistono infatti dei
collegamenti possibili tra queste reti (router), tuttavia essi consentono l’accesso solo in
seguito alla verifica del rispetto di specifiche regole. I router provvedono quindi alla
protezione degli accessi, poiché non tutti i PC del livello ufficio devono poter accedere a
piacimento ad un dispositivo di campo. Mediante questa separazione, inoltre, si assicura
che i disturbi in un segmento della rete non determinino disturbi in altri segmenti.
In particolare, nel collegamento tra Real−Time Ethernet e Ethernet standard, il router
svolge anche altre funzioni. I nodi Ethernet POWERLINK non possono essere collegati con
nodi Ethernet standard ad un segmento di rete. Poiché i nodi standard non riconoscono il
protocollo Real−Time, si verificherebbero delle collisioni che potrebbero compromettere il
funzionamento in tempo reale del bus.
16
EDSETHIND IT 3.1
Varianti della tecnologia "Industrial Ethernet"
3
SERCOS III
Principio
3.5
SERCOS III
L’obiettivo di SERCOS III è coniugare i meccanismi comprovati di SERCOS con i vantaggi del
livello fisico Ethernet. I meccanismi, i profili e le strutture dei telegrammi esistenti sono così
stati trasferiti invariati al livello fisico Ethernet. Questo sistema dovrebbe inoltre
consentire il raggiungimento dei seguenti obiettivi:
3.5.1
ƒ
Riduzione dei costi per la connessione hardware
ƒ
Possibilità di integrazione di protocolli TCP/IP
ƒ
Comunicazione trasversale
ƒ
Trasmissione di dati rilevanti per la sicurezza
ƒ
Tolleranza agli errori rispetto a rotture dei cavi
Principio
SERCOS III prevede un canale IP tramite il quale è possibile trasmettere telegrammi
Ethernet standard. Tale canale non sostituisce il Service Channel proprio del sistema
SERCOS, che viene ancora utilizzato per la trasmissione dei dati ciclici. Il canale IP può
essere disattivato e nella maggior parte dei casi non viene preso in considerazione in
esempi di calcolo tipici.
Analogamente ad Interbus, in ogni ciclo di comunicazione viene trasmesso un frame di
somma, dal quale ciascuno slave ricava o inserisce i propri dati. Per questo motivo, per la
realizzazione di questo sistema, sono richiesti componenti hardware speciali (ASIC o
FPGA).
Per ulteriori informazioni su SERCOS III, vedere ...
ƒ in Internet all’indirizzo www.sercos.com .
3.5.2
Architettura di rete / Topologia
Il SERCOS originario è sempre costituito da un anello in fibra ottica. La struttura ad anello
è stata trasferita anche al livello fisico Ethernet. Poiché ogni collegamento Ethernet offre
un canale di andata e uno di ritorno, si realizza un doppio anello e viene conseguentemente
offerta la possibilità di creare sistemi ridondanti. In caso di guasto di uno slave l’anello
logico è in effetti interrotto, ma la comunicazione è comunque ancora possibile.
La struttura lineare non permette alcuna ridondanza, ma consente di eliminare un
collegamento, aspetto che può portare a un significativo risparmio in caso di sistemi estesi.
Le strutture a stella non sono possibili con SERCOS. Non è infatti possibile l’impiego di
accoppiatori a stella, né di hub o switch.
Le reti SERCOS III sono sempre reti separate. La connessione a sistemi di livello superiore
può avvenire solo tramite il "Motion Controller" o il PLC. Questo passaggio non è ancora
stato definito.
Per l’analisi della rete sono richiesti dispositivi di analisi speciali, poiché il flusso di dati
dipende dal punto di misurazione.
EDSETHIND IT 3.1
17
© 11/2012
F
Lenze Automation GmbH
Grünstraße 36
D−40667 Meerbusch
Germany
Service
Lenze Service GmbH
Breslauer Straße 3
D−32699 Extertal
Germany
(
Ê
ü
+49(0)21 32 /99 04−0
(
Ê
008000/ 2446877 (24 h helpline)
+49(0)21 32 /7 21 90
[email protected]
+49(0)5154/ 82−11 12
[email protected]
www.Lenze.com
EDSETHIND
10
9
8
7
6
5
4
§ .K>0 § IT § 3.1 § TD17
3
2
1