Circuito RC
Il dimensionamento del circuito RC deve tenere conto di:
• ampiezza della sovratensione;
• durata della sovratensione;
• impedenza tra sorgente della sovratensione ed il componente.
Corso di Elettronica di Potenza (12 CFU) – Componenti
1/66
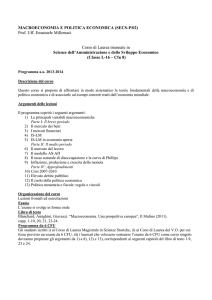
Circuito RC
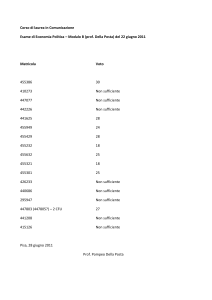
Se per un intervallo di tempo di durata
pari a Ts, si ha una sovratensione che
porta la tensione vi di ingresso da V0 a
V0+Vs, in assenza del circuito RC tale
sovratensione si ripercuoterebbe tutta ai
capi del Diodo.
condizioni iniziali
Corso di Elettronica di Potenza (12 CFU) – Componenti
2/66
Circuito RC
Derivando la seconda e sostituendo in essa il valore di di/dt fornito
dalla prima, si ricava:
Sostituendo alla variabile i con i = Cdvc/dt si ha:
i cui autovalori sono:
Corso di Elettronica di Potenza (12 CFU) – Componenti
3/66
Circuito RC
Scegliendo il valore di R leggermente minore del valore critico Rc =2√L/C
in modo che il comportamento del circuito LRC risulti di tipo oscillatorio
fortemente smorzato, si ha che l’andamento della tensione vc nell’intervallo
(0, Ts) risulta:
I valori dei coefficienti A1 e B1 possono essere ricavati imponendo le
condizioni iniziali: vc(0) = V0 , i(0) = 0; si ha dunque:
A1= -Vs e B1= αVs/ω
Corso di Elettronica di Potenza (12 CFU) – Componenti
4/66
Circuito RC
Sostituendo i valori di A1 e B1 la tensione inversa applicata al Diodo assume
l’espressione:
La massima sovratensione applicata al
Diodo è di poco superiore a Vd1-V0 cioè a
Tale sovratensione è alquanto minore di
Vs e tanto più piccola quanto minore è il
rapporto Ts/T.
Tensione inversa del diodo durante un transitorio
Corso di Elettronica di Potenza (12 CFU) – Componenti
5/66
Circuito con soppressori (Varistor)
La protezione contro sovratensioni
può
essere
effettuata
anche
impiegando dei Varistor collegati in
parallelo al componente.
Sono realizzati con semiconduttori
ossido metallico.
Il comportamento di un Varistor corrisponde a quello di due Diodi Zener
posti in serie con polarità opposta; la tensione di soglia è più elevata di
quella di un Diodo Zener (varie centinaia di V).
Per proteggere il componente si deve avere |Vs |<VRRM
Corso di Elettronica di Potenza (12 CFU) – Componenti
6/66
Le caratteristiche reali dei componenti non sono uguali.
Le correnti che attraversano due Diodi in
parallelo possono essere molto diverse tra
loro.
Per ridurre tale differenza di correnti ad
un valore accettabile, è necessario
montare, in serie ad ogni Diodo, una
resistenza di valore tale che la caduta di
tensione sulla resistenza sia un pò
maggiore della possibile differenza tra le
cadute ai capi dei due Diodi.
Corso di Elettronica di Potenza (12 CFU) – Componenti
7/66
Quando due o più Diodi vengono montati in serie, la ripartizione delle
tensioni inverse può risultare alquanto diversa su ciascun Diodo, a causa
della diversità delle caratteristiche inverse.
Per migliorare la ripartizione delle tensioni occorre montare in parallelo a
ciascun Diodo una resistenza di valore adeguato in modo che in ciascuna
di esse fluisca una corrente un pò maggiore della possibile differenza tra
le correnti inverse che, a parità di tensione, fluiscono nei due Diodi.
L’accorgimento descritto assicura una migliore ripartizione delle tensioni
inverse a regime permanente; per avere una buona ripartizione anche
durante i transitori occorre aggiungere, in parallelo a ciascun Diodo, una
capacità che, nel caso di due Diodi, deve essere di valore maggiore della
possibile differenza tra le capacità inverse dei singoli Diodi.
Corso di Elettronica di Potenza (12 CFU) – Componenti
8/66
Nei convertitori alimentati con tensioni di ampiezza modesta, i fenomeni
connessi alle capacità presenti nelle due giunzioni del Transistor sono in
genere trascurabili.
Nei convertitori, con elevate tensioni di alimentazione, la capacità
presente sulla giunzione base-collettore può produrre correnti di collettore
con andamento impulsivo che raggiungere intensità non trascurabili.
Tale fenomeno può essere descritto sostituendo alla capacità distribuita
nella giunzione una capacità concentrata (Cbc = K/√Vcb) connessa tra la
base e il collettore del Transistor.
In presenza di un elevato dvce/dt il condensatore Cbc è percorso da una corrente
pari a Cbc di/dt che viene iniettata in base e, quindi amplificata producendo una ic
elevata.
Corso di Elettronica di Potenza (12 CFU) – Componenti
9/66
Per ridurre l’entità della corrente iniettata in base si inserisce una
resistenza Rbe tra la base e l’emettitore.
Un ulteriore miglioramento può essere ottenuto polarizzando
negativamente la base del transistor con una tensione dell’ordine di
qualche volt.
La presenza di Cbc presenta anche l’inconveniente di ridurre la velocità di
discesa della tensione vce quando inizia il pilotaggio del Transistor, in
quanto sottrae corrente al pilotaggio.
Tale inconveniente può venire ridotto applicando, durante la
commutazione, una corrente di pilotaggio maggiore di quella necessaria a
regime permanente.
Corso di Elettronica di Potenza (12 CFU) – Componenti
10/66
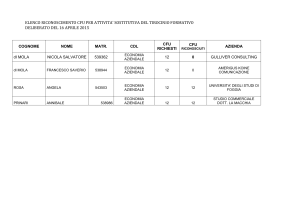
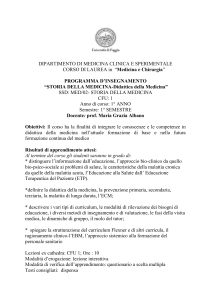
Nel funzionamento a regime permanente la zona di
impiego di un Transistor è definita come area di
sicurezza (Safe Operating ARea, SOAR).
Definisce la zona dove il BJT può lavorare in
maniera continuativa.
In un diagramma Ic-Vce tale area è limitata da
quattro curve:
• massima corrente continuativa sopportabile (IcM);
• massima tensione Vce sopportabile;
Andamento tipico della • massima potenza dissipabile Ic=Pd/Vce;
SOAR (log-log)
• breakdown secondario.
Corso di Elettronica di Potenza (12 CFU) – Componenti
11/66
• La massima corrente continuativa sopportabile è un valore indipendente dalla
tensione Vce. Essa è definita sulla base della massima densità di corrente
continuativa sopportabile dagli elementi che compongono l’assemblaggio del
Transistor.
• La massima tensione collettore-emettitore sopportabile dipende dalle modalità di
pilotaggio; nel definire la SOAR normalmente si fa riferimento alla Vceo cioè alla
massima tensione sopportabile con il circuito di base aperto (ib=0).
• La curva di massima potenza dissipabile dipende dal dimensionamento del circuito
di raffreddamento e ha un andamento lineare. Per temperature del contenitore più
elevate la potenza dissipabile diminuisce in maniera lineare fino ad annullarsi in
corrispondenza alla massima temperatura ammissibile per la giunzione (θmax).
• Il breakdown secondario è un fenomeno di degrado termico che si verifica a causa
del gradiente di tensione lungo la base, in cui alcuni punti della giunzione
collettore-base raggiungono un valore termico instabile (aumenta T e con essa la
corrente di collettore e la potenza dissipata, forte diminuzione di Vce).
Corso di Elettronica di Potenza (12 CFU) – Componenti
12/66
Funzionamento impulsivo
Più importante visto che i semiconduttori
vengono
utilizzati
in
regime
di
commutazione.
La corrente massima in regime impulsivo è
maggiore di quella continuativa.
Le limitazioni dovute alla potenza massima
dissipabile
e
al
breakdown
secondario
diventano tanto meno restrittive quanto
minore
è
la
durata
dell’impulso
fino
scomparire per impulsi molto brevi.
Confronto tra SOAR in regime
continuativo (linea continua) ed in
regime impulsivo (linee tratteggiate).
Corso di Elettronica di Potenza (12 CFU) – Componenti
13/66
Durante la fase di apertura per ridurre i tempi di commutazione la base del
Transistor viene spesso polarizzata inversamente.
In tale condizione operativa, occorre fare riferimento alla SOAR inversa o
RBSOAR.
L’area di sicurezza inversa si riduce all’aumentare della corrente inversa applicata
alla base del Transistor.
Corso di Elettronica di Potenza (12 CFU) – Componenti
14/66
Nelle applicazioni che richiedono elevate
correnti di collettore, per ridurre la corrente
di pilotaggio, si ricorre all’impiego di più
Transistor in configurazione Darlington.
Le resistenze tra base ed emettitore servono per ridurre gli effetti dovuti alla
corrente di dispersione dei due Transistor.
La tensione di saturazione di T2 è Vce2 = Vbe2 + Vce1
In fase di apertura il tempo complessivo di accumulo risulta pari alla somma
dei tempi dei due Transistor. Per ridurre i tempi di apertura si inserisce un
diodo tra la base di T2 e quella di T1.
Sono in genere integrati in un’unica pasticca di silicio.
Corso di Elettronica di Potenza (12 CFU) – Componenti
15/66
Il circuito di pilotaggio di un Transistor di potenza deve provvedere a:
1. fornire una corrente di pilotaggio sufficiente a mantenere il
transistor in saturazione, quando questo deve essere chiuso;
2. assicurare una buona commutazione del transistor.
Per soddisfare 1. il dispositivo di pilotaggio deve fornire una corrente
leggermente superiore a quella di saturazione del Transistor.
Per soddisfare 2. si deve imporre che il tempo di salita della corrente di
pilotaggio sia inferiore al tempo di ritardo del Transistor.
Per ridurre l’influenza della capacità Cbc la corrente di pilotaggio durante la
commutazione deve essere più elevata di quella a regime permanente.
Per una buona apertura del Transistor si applica una lieve f.e.m. inversa con
una bassa impedenza serie.
Corso di Elettronica di Potenza (12 CFU) – Componenti
16/66
Quando si desidera che il Transistor di
potenza (TP) entri in conduzione, il
segnale vi di ingresso viene portato alto
in modo tale da portare in conduzione i
Transistor T4, T3 e T1 ed in interdizione
il Transistor T2.
Il ramo, composto da R2 e C2 serve per
fornire una sovracorrente di pilotaggio
durante la chiusura di TP.
Se si desidera che il transistor di potenza venga spento, il segnale di
ingresso viene portato basso, in modo tale da portare in conduzione il
Transistor T2 ed in interdizione i Transistor T1, T3 e T4.
Corso di Elettronica di Potenza (12 CFU) – Componenti
17/66
In molti convertitori gli emettitori dei diversi Transistor di potenza non si
trovano tutti allo stesso potenziale. E’ necessario disaccoppiare
galvanicamente i circuiti di pilotaggio di almeno una parte dei Transistor dal
circuito di controllo dell’intero convertitore.
Il disaccoppiamento può essere ottenuto impiegando un trasformatore o un
accoppiatore ottico.
Quando si impiega un trasformatore, questo può essere utilizzato per
trasferire tutta la potenza necessaria per il pilotaggio del Transistor oppure
solo a livello di segnale.
Quando, invece, si impiega un accoppiatore ottico, questo può, ovviamente,
essere utilizzato solo a livello di segnale. Occorre inserire un circuito di
alimentazione per fornire le tensioni di alimentazione dei circuiti di
pilotaggio disaccoppiate tra loro.
Corso di Elettronica di Potenza (12 CFU) – Componenti
18/66
Lo stadio in ingresso al driver è costituito da un diodo LED (Vd= 1.5V@10mA).
Il pilotaggio dell’accoppiatore non può essere effettuato direttamente dal
microcontrollore, che non può fornire una corrente sufficiente, ma da uno stadio
amplificatore. Lo stadio finale del driver è realizzato in configurazione push-pull
capace di sopportare una tensione di alimentazione Vcc-Vee compresa tra 15V e 30V e
una corrente massima pari a 2A.
Particolare attenzione va rivolta al max dv/dt sopportabile, che nel
dispositivo considerato è pari a 30kV/s, pena la perdita dell’isolamento.
Corso di Elettronica di Potenza (12 CFU) – Componenti
19/66
Protezioni contro sovracorrenti
Per rilevare la necessità di intervento della protezione contro le sovracorrenti
si possono impiegare varie tecniche.
Quella più diretta è basata sulla misura della corrente di collettore o di
emettitore del Transistor.
Un’altra tecnica, notevolmente semplice, è di tipo indiretto e si basa sulla
determinazione dell’uscita dei dispositivi dalla saturazione: tale
determinazione viene effettuata mediante il confronto tra la tensione Vce ed
una tensione leggermente superiore a quella di saturazione.
Entrambe le tecniche descritte sono in grado di assicurare una efficace
protezione del transistor quando le induttanze presenti nel circuito sono tali
da garantire che la corrente di collettore non possa variare in maniera troppo
rapida.
Corso di Elettronica di Potenza (12 CFU) – Componenti
20/66
Protezioni contro sovracorrenti
Corso di Elettronica di Potenza (12 CFU) – Componenti
21/66
Protezioni contro sovracorrenti
Esempio di circuito di protezione locale dalle sovracorrenti basato
sulla uscita dalla saturazione
Corso di Elettronica di Potenza (12 CFU) – Componenti
22/66
M2 è pilotato in saturazione, la tensione VDS
carica C7 tramite R17 in modo da generare un
ritardo che permette a M2 di portarsi in
saturazione
A) VDS <Vth=1.4V Q5 e Q7 rimangono off e M2
in conduzione.
B) VDS >Vth=1.4V, Q5 e Q7 entrano in
conduzione interdicendo M2 (protezione).
Una volta interdetto la tensione VDS cresce
velocemente mantenendo attiva la protezione
fino al successivo comando di off di M2.
C) M2 è comandato nello stato di interdizione.
In questa situazione il diodo D5 entra in
conduzione portando la tensione di base su
Q5 al valore di 0.7V (reset della protezione)
Corso di Elettronica di Potenza (12 CFU) – Componenti
23/66
Protezioni contro sovratensioni
Per proteggere un Transistor contro le sovratensioni
si inserisce un circuito costituito da un Diodo, un
condensatore ed una resistenza, atto ad evitare
l’insorgere di una elevata corrente durante la fase di
chiusura del Transistor.
Lo stesso circuito consente anche di ridurre le perdite localizzate nel
Transistor durante la fase di apertura.
Un altro accorgimento, necessario in presenza di carichi induttivi, consiste
nell’inserzione di un Diodo di libera circolazione tra emettitore e collettore,
atto a creare una via di passaggio della corrente quando il Transistor viene
interdetto.
Corso di Elettronica di Potenza (12 CFU) – Componenti
24/66
IGBT (Insulated Gate Bipolar Transistor )
Componenti che sfruttino i vantaggi delle tecnologie bipolare e ad effetto di campo
integrando BJT e MOSFET.
Tale architettura conferisce al dispositivo la caratteristica di alta impedenza di
ingresso, tipica del MOSFET, e una capacità di conduzione della corrente simile a
quella di un BJT.
Corso di Elettronica di Potenza (12 CFU) – Componenti
25/66
IGBT (Insulated Gate Bipolar Transistor )
Il funzionamento di un IGBT può essere
spiegato sulla base di un circuito equivalente:
applicando al gate una tensione positiva
rispetto all’emettitore, il MOSFET di
ingresso entra in conduzione, polarizzando
direttamente la giunzione base-emettitore del
BJT Q1.
La sua accensione provoca la modulazione
della conducibilità della regione n-, il cui è
effetto è stato schematizzato con la resistenza
Rdrift.
La riduzione a zero della tensione vge
determina lo spegnimento del componente.
Corso di Elettronica di Potenza (12 CFU) – Componenti
26/66
IGBT (Insulated Gate Bipolar Transistor )
Il BJT parassita Q2 forma con Q1 una struttura
a controreazione, che potrebbe causare una
conduzione non controllata dell’IGBT. Ciò
viene evitatato riducendo la resistività,
mediante un forte drogaggio della zona di
strato p al di sotto.
In fase di spegnimento del dispositivo, a
causa della elevata Cgc ed in corrispondenza a
consistenti valori di dvce/dt, si potrebbero
verificare fenomeni di riaccensione. Per
evitare tale inconveniente, lo spegnimento del
componente deve avvenire applicando una
tensione vge negativa.
Corso di Elettronica di Potenza (12 CFU) – Componenti
27/66
Spegnimento
Corso di Elettronica di Potenza (12 CFU) – Componenti
28/66
Vantaggi
Le principali caratteristiche che rendono vantaggioso l’impiego degli
IGBT sono le seguenti:
• pilotaggio simile a quello di un MOSFET (con assorbimento di corrente
solo durante le commutazioni);
• tempi di commutazione molto contenuti rispetto a quelli di un BJT di
uguale portata (in genere inferiori al ms);
• tensioni massime sopportabili molto maggiori di quelle applicabili ad un
MOSFET, senza pesante degrado delle prestazioni;
• minori problemi, rispetto ad un BJT, per soddisfare i requisiti connessi
alla SOAR inversa.
Corso di Elettronica di Potenza (12 CFU) – Componenti
29/66
Caratteristiche IGBT
Gli andamenti delle caratteristiche di uscita di un IGBT sono molto simili a
quelle di un Transistor bipolare, pur presentando una uscita dalla
saturazione molto più marcata.
Corso di Elettronica di Potenza (12 CFU) – Componenti
30/66
Comportamento ideale
Gli SCR (Silicon Controlled Rectifier) o Tiristori rappresentano il
componente fondamentale per i convertitori di più alta potenza e per molti
dei convertitori alimentati in corrente alternata.
Idealmente possono essere considerati come degli interruttori che possono
condurre in un’unica direzione e di cui è possibile comandare solo la
chiusura. L’apertura è invece determinata solo dal circuito di potenza al
quale è connesso.
Corso di Elettronica di Potenza (12 CFU) – Componenti
31/66
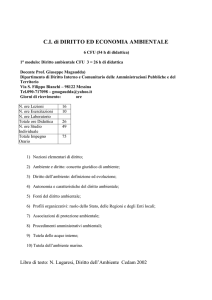
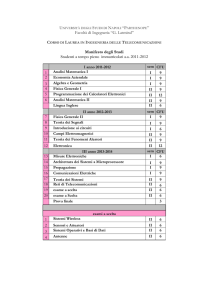
Caratteristiche statiche
Ih
Vd
Vak = tensione applicata fra anodo e catodo
Vd = tensione di picco diretta
Ia = corrente che fluisce nel componente
Ig = corrente applicata all’elettrodo di controllo
Ih = corrente di tenuta (hold)
Corso di Elettronica di Potenza (12 CFU) – Componenti
32/66
Meccanismi di innesco
Ic1 = hfe1Ib1 + Iceo1 dove Iceo1 = (1 + hfe1) Icbo1
Ic2 = hfe2Ib2 + Iceo2 dove Iceo2 = (1 + hfe2) Icbo2
Tenendo conto che
Ib1 = Ic2
Ib2 = Ic1 + Ig
Ia = Ic1+Ic2
Corso di Elettronica di Potenza (12 CFU) – Componenti
33/66
Meccanismi di innesco
Ic1
Anello a reazione positiva con guadagno hfe1hfe2
Corso di Elettronica di Potenza (12 CFU) – Componenti
34/66
Meccanismi di innesco
hfe varia con la corrente di emettitore, quindi se Ig = 0 e la tensione Vak < Vd,
la condizione di guadagno d’anello minore dell’unità è verificata e pertanto
la corrente anodica Ia è molto piccola.
Ia = [(1 + hfe2) Iceo1 + (1 + hfe1) (Iceo2 + hfe2 Ig)]/(1- hfe1hfe2)
Corso di Elettronica di Potenza (12 CFU) – Componenti
35/66
Meccanismi di innesco
Se, con Vak < Vd, si applica una Ig >0 le correnti di emettitore, e di
conseguenza anche il guadagno di anello aumentano.
Se la corrente di pilotaggio raggiunge un valore tale per cui hfe1·hfe2 > 1, il
funzionamento del Tiristore diventa instabile ed Ia dipende solo dal circuito
esterno. Una volta terminato l’innesco, se la corrente anodica rimane
maggiore di Ih, il valore del guadagno d’anello si mantiene maggiore
dell’unità.
Corso di Elettronica di Potenza (12 CFU) – Componenti
36/66
Meccanismi di innesco
Il meccanismo di innesco descritto giustifica anche l’innesco dovuto ad una
tensione anodica maggiore della massima tensione di picco diretta Vd:
all’aumentare della tensione aumentano le correnti di dispersione, quindi i
valori dei guadagni in corrente.
Corso di Elettronica di Potenza (12 CFU) – Componenti
37/66
Meccanismi di innesco
L’innesco può avvenire anche se, senza raggiungere il valore Vd, la tensione
anodica sale con un dv/dt elevato.
Il rapido incremento della tensione produce, a causa delle capacità presenti
tra i vari strati del semiconduttore, delle correnti transitorie nei due
Transistor che possono portare il prodotto hfe1·hfe2 ad un valore maggiore
dell’unità.
Corso di Elettronica di Potenza (12 CFU) – Componenti
38/66
Caratteristica dell’elettrodo di controllo
Corso di Elettronica
L’area di possibile accensione presenta punti
molto prossimi alla curva di massima potenza
dissipabile in regime continuativo. Risulta
quindi difficile, se si desidera mantenere
applicato il pilotaggio per lunghi intervalli di
tempo, scegliere la caratteristica del circuito
di pilotaggio in modo tale da garantire
l’accensione del Tiristore in qualunque
condizione operativa evitando di superare la
massima potenza continuativa dissipabile.
In molte applicazioni è conveniente, per
migliorare la commutazione, che la corrente
di pilotaggio sia alquanto maggiore di quella
sicura accensione.
di Potenza (12 CFU) di
– Componenti
39/66
Caratteristica dell’elettrodo di controllo
La minima Vg di sicura accensione
risulta praticamente indipendente dal
valore della temperatura di giunzione.
La minima Ig di sicura accensione
presenta una cospicua dipendenza dal
valore della temperatura.
Il valore della max Vg che garantisce la
non accensione del Tiristore è molto
piccolo, quindi il circuito di pilotaggio
deve essere progettato con particolare
cura al fine di evitare l’insorgere di
disturbi che potrebbero portare ad
accensioni indesiderate del Tiristore.
Corso di Elettronica di Potenza (12 CFU) – Componenti
40/66
Caratteristica dell’elettrodo di controllo
Nei circuiti in cui si è sicuri che, nell’istante
in cui si inizia il pilotaggio, la Vak sia positiva
e che, in tutto l’intervallo di tempo durante il
quale si desidera che il Tiristore sia chiuso,
la Ia > Ih, è sufficiente impiegare, per il
pilotaggio, un impulso di corrente di durata
pari a 6 - 8 s. In questo caso, quindi, la
potenza di pilotaggio che occorre prendere in
considerazione è quella di picco sopportabile
dalla giunzione.
Altrimenti si deve ricorrere ad un treno di
impulsi con = 0.1-0.3.
Corso di Elettronica di Potenza (12 CFU) – Componenti
41/66
Caratteristica dell’elettrodo di controllo
Noto il rapporto γ, è possibile fissare i
valori di eg ed Rg in modo tale che la
caratteristica del circuito di pilotaggio
non superi la curva della massima
potenza dissipabile e sia abbastanza
lontana
dall’area
di
possibile
accensione.
Nel caso di Tiristori di grossa taglia la
corrente
che
deve
essere
applicata
all’elettrodo di controllo può risultare
elevata. Si adotta una configurazione in
cui la corrente di pilotaggio del Tiristore
RC1 è fornita da un altro Tiristore, RC2 di
taglia ridotta e che richiede una piccola
corrente di pilotaggio (Amplifying Gate).
Corso di Elettronica di Potenza (12 CFU) – Componenti
42/66
Comportamento transitorio
Durante la fase di innesco,
l’intensità di corrente presenta un
ritardo iniziale di durata pari a td
(tempo di ritardo), simile a quello
di un transistor e dipendente dalle
caratteristiche dell’impulso di
accensione. Durante la fase di
salita della corrente, la tensione
anodica diminuisce lentamente.
Pertanto, durante la commutazione
si verifica una dissipazione di
energia che risulta tanto maggiore
quanto più elevato è il di/dt.
Corso di Elettronica di Potenza (12 CFU) – Componenti
43/66
Comportamento transitorio
Il passaggio dallo stato di conduzione a quello di interdizione
(spegnimento) non può essere controllato agendo sull’elettrodo di controllo
ma dipende solo dal circuito anodico e richiede un tempo ts di spegnimento.
I Tiristori possono essere suddivisi in due distinte famiglie:
• Tiristori lenti (o per commutazione da rete) che presentano un tempo di
spegnimento compreso tra alcune decine di s (per i Tiristori di
piccolissima potenza) a svariate centinaia di s;
• Tiristori veloci (o per commutazione forzata) che presentano tempi di
spegnimento ridotti.
Il tempo di spegnimento aumenta all’aumentare della temperatura e della
corrente anodica mentre diminuisce all’aumentare della velocità di discesa
della corrente, della tensione inversa applicata tra anodo e catodo e della
polarizzazione inversa dell’elettrodo di controllo.
Corso di Elettronica di Potenza (12 CFU) – Componenti
44/66
Comportamento transitorio
A seconda della velocità di discesa della corrente anodica e del
valore della tensione inversa applicata al Tiristore si possono
individuare tre diverse modalità di spegnimento:
• statico;
• quasi statico;
• forzato.
Corso di Elettronica di Potenza (12 CFU) – Componenti
45/66
Spegnimento statico
Lo spegnimento statico è lo spegnimento tipico dei circuiti in cui
la corrente presenta un andamento decrescente in maniera
esponenziale ed è caratterizzato da una lenta discesa della corrente
al di sotto della corrente di tenuta, senza che il Tiristore risulti mai
contropolarizzato. Tra i vari tipi di spegnimento, questo è quello
che presenta il tempo di spegnimento più lungo.
Per contro, le perdite di commutazione dovute allo spegnimento
sono del tutto trascurabili.
Corso di Elettronica di Potenza (12 CFU) – Componenti
46/66
Spegnimento quasi statico
Lo spegnimento quasi statico è caratterizzato da una diminuzione
non eccessivamente veloce della corrente anodica e/o da una
controtensione modesta o comunque con un dv/dt limitato.
La maggiore velocità di discesa della corrente e l’eventuale
applicazione di una controtensione riducono in maniera
consistente la durata del tempo di spegnimento, rispetto a quella
della modalità precedente. Anche in questo tipo di spegnimento,
l’assenza di una contropolarizzazione riduce a valori praticamente
trascurabili le perdite localizzate nel semiconduttore durante lo
spegnimento.
Corso di Elettronica di Potenza (12 CFU) – Componenti
47/66
Spegnimento forzato
Lo spegnimento forzato è caratterizzato dalla applicazione di una
controtensione con un dv/dt elevato che viene normalmente ottenuta
chiudendo in parallelo al Tiristore un generatore con una bassa impedenza
interna. Questo tipo di spegnimento permette di minimizzare la durata del
tempo di spegnimento, ma presenta l’inconveniente di provocare delle
perdite consistenti nel semiconduttore.
trr=t2+t3
Corso di Elettronica di Potenza (12 CFU) – Componenti
48/66
Comportamento statico
• Massimo picco ripetitivo di tensione inversa sopportabile (VRRM);
• massimo picco non ripetitivo di tensione inversa (VRSM);
• massimo valore di tensione diretta (VDRM) per il quale, in assenza di pilotaggio, è
garantita la non accensione del Tiristore;
• il valore di corrente continuativa sopportabile (IAV);
• il valore efficace di corrente sopportabile in varie situazioni operative (IRMS);
• il valore di picco non ripetitivo (IFSM);
• la potenza dissipata in varie situazioni operative;
• la caduta diretta Vak in funzione della corrente anodica;
• la corrente inversa corrispondente alla massima tensione inversa applicabile;
• le caratteristiche dell’elettrodo di controllo (area in cui è compresa la caratteristica,
area di possibile accensione);
• la massima temperatura a cui il semiconduttore può lavorare;
• la resistenza termica tra semiconduttore e contenitore (Rθjc).
Corso di Elettronica di Potenza (12 CFU) – Componenti
49/66
Comportamento transitorio
• i valori dei tempi relativi alla accensione;
• il valore del massimo di/dt sopportabile durante l’accensione;
• il valore del massimo dv/dt, per il quale è garantita la non accensione;
• il valore del tempo di spegnimento (ts), con una o più modalità di
spegnimento;
• l’andamento della capacità tra anodo e catodo, al variare della tensione
applicata;
• il valore del tempo di recupero o quello della carica inversa;
• la resistenza termica transitoria tra giunzione e contenitore rθ(t);
• l’area quadratica (i2t) di corrente sopportabile in caso di sovraccarico;
Corso di Elettronica di Potenza (12 CFU) – Componenti
50/66
Le specifiche variano a seconda del di/dt
all’accensione. In caso di basso di/dt, nessun
accorgimento particolare va considerato.
Quando il di/dt raggiunge valori elevati è
conveniente che l’ampiezza dell’impulso di
corrente di pilotaggio sia la più elevata
possibile.
È necessario che il tr della corrente abbia una
durata inferiore al td del Tiristore.
Quando
è
necessario
disaccoppiare
galvanicamente il circuito di controllo da
quello di potenza si inserisce un trasformatore
che trasferisce tutta la potenza necessaria per
il pilotaggio.
Corso di Elettronica di Potenza (12 CFU) – Componenti
51/66
Protezioni contro eccessivi di/dt
All’atto dell’accensione la Ia applicata al Tiristore deve salire con un di/dt
minore del di/dt max. sopportabile dal componente; risulta, pertanto,
necessario aggiungere induttanze addizionali, tali da portare il di/dt a valori
accettabili.
L’inserimento di una induttanza produce una dissipazione di energia all’atto
della apertura del Tiristore stesso e richiede un accurato esame delle
sovratensioni che possono verificarsi in questa situazione operativa.
In molti convertitori, per limitare la quantità di energia magnetica
immagazzinata dall’induttanza, si fa ricorso ad induttanze saturabili, che
limitano il valore del di/dt solo per un breve intervallo di tempo, sufficiente
al diffondersi dell’innesco su tutto il Tiristore.
Corso di Elettronica di Potenza (12 CFU) – Componenti
52/66
Protezioni contro eccessivi dv/dt
Se il valore del dv/dt (che può portare in conduzione il Tiristore, anche in
assenza di impulso di pilotaggio) applicato ad un Tiristore può risultare
maggiore di quello sopportabile, diventa necessario impiegare un
opportuno circuito atto a ridurre la pendenza della tensione anodica.
Il circuito impiegato è analogo a quello già illustrato per proteggere i
Diodi da sovratensioni.
Corso di Elettronica di Potenza (12 CFU) – Componenti
53/66
Protezioni contro eccessivi dv/dt
Per ricavare il valore della max. tensione di picco Vap e del max. dv/dt si
può ricorrere ad andamenti grafici anziché espressioni analitiche.
Vap dipende solo da , mentre il dv/dt è proporzionale a Eg ed n.
Si sceglie in base a
Vap e poi il valore di
n che soddisfa il
dv/dt.
Corso di Elettronica di Potenza (12 CFU) – Componenti
54/66
Protezioni contro eccessivi dv/dt
In molte applicazioni, il valore della resistenza R risulta molto piccolo e
tale da produrre, durante la successiva accensione del Tiristore, una
corrente troppo elevata. Si ricorrere ad un circuito in cui sono stati
introdotti un Diodo ed una ulteriore resistenza.
In questo modo la resistenza posta in serie al condensatore durante la fase
di salita della tensione è pari al parallelo tra R1 e R2, mentre risulta pari
ad R2 quando il Tiristore viene chiuso.
Corso di Elettronica di Potenza (12 CFU) – Componenti
55/66
Sovracorrenti e sovratensioni
I problemi connessi alla protezione locale dei Tiristori contro sovracorrenti
sono del tutto analoghi a quelli dei Diodi.
Molto spesso, specialmente nei convertitori alimentati in corrente
continua, i Tiristori sono impiegati come interruttori statici con un
apposito circuito che provvede al loro spegnimento. In questo caso è,
quindi, possibile impiegare anche protezioni locali di tipo attivo.
Occorre rilevare che le protezioni attive dei Tiristori hanno un tempo di
intervento più lungo rispetto a quelle dei Transistor.
Anche per le sovratensioni le protezioni locali sono realizzate con circuiti
RC o con soppressori di sovratensione.
Molto spesso il circuito RC impiegato per limitare il dv/dt è sufficiente
anche per proteggere il Tiristore da sovratensioni.
Corso di Elettronica di Potenza (12 CFU) – Componenti
56/66
Montaggi in serie e in parallelo
Occorre considerare
• differenze tra le caratteristiche statiche dei vari componenti
• differenze tra le caratteristiche dinamiche (tON, trr e IrM ).
Nel caso di montaggio in parallelo, la differenza tra i tempi di accensione
può produrre un incremento del valore del di/dt di uno dei componenti,
mentre può provocare valori transitori della tensione diretta più elevati di
quello massimo sopportabile dal componente, nel caso di montaggio in
serie. Le differenze tra i tempi di recupero richiedono particolari
accorgimenti quando lo spegnimento viene effettuato in maniera forzata.
Attualmente, piuttosto che utilizzare montaggi in serie o in parallelo si
preferisce ricorrere ad apposite strutture di conversione, ad esempio
convertitori con struttura a più livelli.
Corso di Elettronica di Potenza (12 CFU) – Componenti
57/66
Componenti derivati dai tiristori
Lo spegnimento dei Tiristori rappresenta il principale problema connesso al
loro impiego. L’ampia diffusione dei Tiristori ha portato a cercare di
superare tale problema mediante lo sviluppo di componenti che possono
essere spenti agendo opportunamente sull’elettrodo di controllo.
I primi componenti con tale caratteristica sono stati i GTO (Gate Turn-Off
Thyristors) che hanno ottenuto un successo industriale inferiore alle attese
per il contemporaneo incremento delle portate dei BJT e, successivamente
degli IGBT.
L’interesse per i Tiristori e per i componenti da essi derivati si è spostato per
tensioni e potenze sempre più elevate.
Attualmente l’intersse è rivolto solo a GTO, GCT (Gate Controlled turn-off
Thyristors) ed i Tiristori con gate isolato.
Corso di Elettronica di Potenza (12 CFU) – Componenti
58/66
Struttura dei GTO
La struttura di un GTO può essere approssimata come costituita da un
elevato numero di Tiristori elementari posti in parallelo tra loro.
Il circuito equivalente è simile a quello di un Tiristore con in più una
resistenza (Rs) tra l’emettitore e la base del Transistor PNP.
A differenza dei Tiristori, nei GTO i due Transistor NPN e PNP presentano
dei guadagni in corrente (hfe) molto piccoli.
Corso di Elettronica di Potenza (12 CFU) – Componenti
59/66
Accensione
L’accensione di un GTO richiede un impulso di corrente di ampiezza e
durata maggiori di quelli relativi ad un Tiristore a causa del minore
guadagno dei due Transistor e della presenza della resistenza Rs.
Se alla fine dell’impulso di accensione la corrente anodica ha superato di
poco il valore della corrente di tenuta (Ih) può succedere che una rapida
discesa della corrente di pilotaggio provochi lo spegnimento del GTO.
Per evitare tale inconveniente spesso il pilotaggio del GTO viene
mantenuto, con un livello di corrente leggermente maggiore di quello di
sicura accensione; ciò consente anche una apprezzabile riduzione della
caduta diretta che è sensibilmente maggiore di quella di un equivalente
Tiristore.
Corso di Elettronica di Potenza (12 CFU) – Componenti
60/66
Spegnimento
Lo spegnimento può essere effettuato facendo fluire nel gate una corrente
inversa di ampiezza sufficientemente elevata o applicando all’elettrodo di
controllo una controtensione (di ampiezza 5-10V), eventualmente con una
piccola resistenza in serie.
I tempi di spegnimento ts e tf diminuiscono al crescere della controtensione
o della controcorrente applicata.
Il transitorio di discesa della corrente è composto da due fasi:
1. fase di discesa (fall) dove si verifica un rapido decremento della
corrente anodica fino al valore I1 che dipende da Ia, Ig, Eg;
2. fase di coda (tail) dove il decremento della corrente risulta alquanto più
lento che nella prima.
Il valore di I1 (≈ 0.1 Ia) diminuisce all’aumentare di ts; per ridurre le perdite
è conveniente effettuare uno spegnimento lento. Per valori più bassi di I1 si
effettua uno spegnimento rapido.
Corso di Elettronica di Potenza (12 CFU) – Componenti
61/66
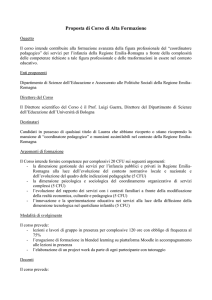
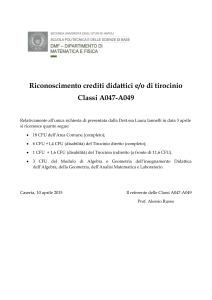
Massimo dv/dt
Andamento della SOAR di un GTO
La massima pendenza con la quale può
essere riapplicata al GTO una tensione
diretta durante la fase di spegnimento è
notevolmente dipendente dal valore
della corrente da spegnere.
Se la corrente da spegnere è minore
della corrente continuativa, il dv/dt
applicabile è paragonabile a quello di un
equivalente Tiristore veloce.
Se la corrente da spegnere è prossima
alla massima corrente commutabile, il
valore del dv/dt si riduce in maniera
consistente.
Corso di Elettronica di Potenza (12 CFU) – Componenti
62/66
Massimo dv/dt
Massima corrente commutabile al
Massima corrente commutabile al
variare del dv/dt
variare della capacità del circuito di
protezione
Corso di Elettronica di Potenza (12 CFU) – Componenti
63/66
Caratteristiche dei GCT
Lo spegnimento dei GTO presenta alcuni inconvenienti quali:
• un elevato tempo di storage;
• il fenomeno della coda della corrente anodica;
• il limitato valore del dv/dt con il quale può venire riapplicata la tensione
anodica dopo lo spegnimento.
L’ultimo inconveniente è il più gravoso in quanto costringe all’impiego di
circuiti di snubber, con un valore di capacità elevato.
Nelle applicazioni di elevata potenza, i componenti che consentono di
ridurre tutti o parte degli inconvenienti precedentemente evidenziati sono i
GCT e i Tiristori con gate isolato.
Corso di Elettronica di Potenza (12 CFU) – Componenti
64/66
Caratteristiche dei GCT
I GCT hanno una struttura analoga a quella
di un GTO, ma presentano una induttanza
del circuito dell’elettrodo di controllo
inferiore.
Vantaggi rispetto ai GTO:
• pilotaggio dell’elettrodo di controllo con
un di/dt molto più elevato;
• caduta diretta inferiore;
• ridotto tempo di storage, (frequenza di
commutazione maggiore).
Corso di Elettronica di Potenza (12 CFU) – Componenti
65/66
Tiristori con Gate isolato
La prima realizzazione di un componente di questo tipo è stata ottenuta
introducendo un MOS, preposto allo spegnimento del Tiristore.
Per tale motivo il componente è stato denominato MOS Turn-Off thyristor
(MTO). Una ulteriore evoluzione ha condotto allo sviluppo dei MOSControlled Thyristors (MCT) che impiegano,due dispositivi MOS, uno
dedicato all’accensione e l’altro allo spegnimento del Tiristore.
MTO
Corso di Elettronica di Potenza (12 CFU) – Componenti
MCT
66/66