Esercitazione 1
Matteo Luca Ruggiero1
1 Dipartimento
di Fisica del Politecnico di Torino
Anno Accademico 2010/2011
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
1 / 76
Sommario
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
2 / 76
Riferimenti
Riferimenti per il Corso
Matteo Luca Ruggiero ([email protected])
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
3 / 76
Riferimenti
Riferimenti per il Corso
Matteo Luca Ruggiero ([email protected])
Materiale Didattico:
Portale della Didattica (http://didattica.polito.it)
Sito Personale (www.matteoluca.it, “Teaching”)
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
3 / 76
Riferimenti
Riferimenti per il Corso
Matteo Luca Ruggiero ([email protected])
Materiale Didattico:
Portale della Didattica (http://didattica.polito.it)
Sito Personale (www.matteoluca.it, “Teaching”)
Testi di Esercizi...vari!
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
3 / 76
Posizione, Spostamento e Legge Oraria
Sommario
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
4 / 76
Posizione, Spostamento e Legge Oraria
Cinematica de Punto
Punto Materiale
Facciamo riferimento ad oggetti puntiformi, cioè aventi dimensioni
trascurabili rispetto alle dimensioni tipiche dell’ambiente in cui vivono.
Faremo astrazione dalla natura fisico-chimica degli oggetti in
questione, che saranno schematizzati come semplici punti materiali
privi di struttura interna.
Cinematica
Astriamo anche dalle cause che producono il moto: questo approccio
descrittivo al moto dei punti materiali prende il nome di Cinematica del
Punto. In particolare, ci occuperemo di introdurre gli strumenti
matematici e geometrici utili per definire i concetti di posizione, velocità
e accelerazione, i quali permettono una completa descrizione del
moto.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
5 / 76
Posizione, Spostamento e Legge Oraria
Sulla Descrizione del Moto
Moto di un Punto Materiale
Il concetto di moto di un Punto Materiale è legato alla variazione della
sua posizione nel tempo.
Preliminare a questa descrizione è la definizione del Sistema di
Riferimento rispetto al quale viene misurata la variazione di posizione.
Sistema di Riferimento
Il Sistema di Riferimento è un insieme di punti che non variano la
reciproca distanza, e costituiscono il sistema di riferimento fisico.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
6 / 76
Posizione, Spostamento e Legge Oraria
Sulla Descrizione del Moto
Moto di un Punto Materiale
Il concetto di moto di un Punto Materiale è legato alla variazione della
sua posizione nel tempo.
Preliminare a questa descrizione è la definizione del Sistema di
Riferimento rispetto al quale viene misurata la variazione di posizione.
Sistema di Riferimento
Il Sistema di Riferimento è un insieme di punti che non variano la
reciproca distanza, e costituiscono il sistema di riferimento fisico.
Utilizziamo esempio di moto bidimensionale (piani, superfici): tutto
può essere generalizzato, aggiungendo una dimensione, al moto
nello spazio tridimensionale.
La scelta di coordinate (cartesiane, curvilinee) viene dettato dalla
simmetria del problema che si studia
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
6 / 76
Posizione, Spostamento e Legge Oraria
Posizione e Traiettoria di un Punto Materiale
Posizioni
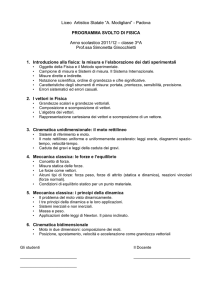
Riferimento fisico è quello a cui appartiene il punto O.
−→ −→ −→ −→
I segmenti OP 1 , OP 2 , OP 3 , OP 4 rappresentano le posizioni in
successivi istanti di tempo del punto mobile P rispetto al punto
fisso O
L’insieme di tutte le posizioni assunte dal punto mobile costituisce
la sua traiettoria
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
7 / 76
Posizione, Spostamento e Legge Oraria
Posizione come Vettore
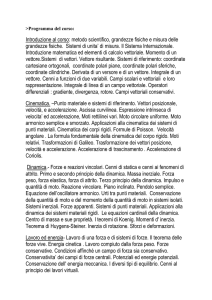
Vettore Posizione e sue Componenti
La posizione del punto P rispetto al punto fisso O è rappresentata dal
vettore r cui è possibile associare le componenti cartesiane, una volta
scelto un sistema di coordinate cartesiane con origine in O.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
8 / 76
Posizione, Spostamento e Legge Oraria
Componenti di un Vettore
Vettore e Basi
Sussiste una corrispondenza biunivoca fra un vettore e le sue
componenti rispetto alla base scelta: quindi, una volta scelta la base, il
vettore può essere identificato dalle sue componenti.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
9 / 76
Posizione, Spostamento e Legge Oraria
Componenti del Vettore Posizione
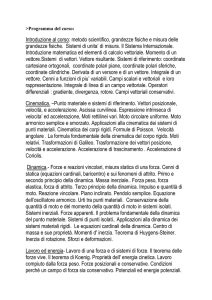
Base Ortonormale
Scegliamo la base ortonormale costituita dai versori (fissi) i, j di
un sistema di coordinate cartesiane, detta anche base canonica
Ortonormale: i· i = j· j = 1; i· j = 0
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
10 / 76
Posizione, Spostamento e Legge Oraria
Componenti del Vettore Posizione
Componenti rispetto alla Base Canonica
Rispetto alla base canonica il vettore posizione si può scrivere
nella forma
r=x i+y j
x, y ∈ R sono le componenti cartesiane del vettore r, mediante le
quali è identificato
Per definizione x = r · i,
ML Ruggiero (DIFIS)
y =r· j
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
11 / 76
Posizione, Spostamento e Legge Oraria
Legge Oraria del Moto di un Punto Materiale
Legge Oraria
.
Ad ogni istante possiamo associare al punto P il vettore posizione r =
−→
OP rispetto al punto fisso O. La dipendenza funzionale del vettore
posizione dal tempo costituisce la legge oraria del moto del punto in
esame:
r = r(t)
La legge oraria è completamente determinata una volta che, fissata la
base {i, j}, conosciamo le componenti cartesiane x(t), y(t) in funzione
del tempo:
r(t) = x(t) i + y(t) j
Studiare il Moto
Studiare il moto di un punto materiale significa determinare la legge
oraria del moto del punto, vale a dire determinare le funzioni x(t), y(t)
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
12 / 76
Posizione, Spostamento e Legge Oraria
Legge Oraria del Moto di un Punto Materiale
In Una Dimensione
r = r(t)
r(t) = x(t) i
Studiare il moto vuol dire dire determinare la funzione x(t)
In Tre Dimensioni
r = r(t)
r(t) = x(t) i + y(t)j + z(t)k
Studiare il moto vuol dire dire determinare le funzione x(t), y(t), z(t)
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
13 / 76
Velocità
Sommario
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
14 / 76
Velocità
Variazione della Posizione
Spostamento
. −→
Se all’istante t = t1 è il vettore posizione è r1 = OA, e a t = t2 è il
. −→
vettore posizione è r2 = OB, allora il vettore ∆r = r2 − r1 rappresenta
lo spostamento nell’intervallo di tempo ∆t = t2 − t1 .
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
15 / 76
Velocità
Il Concetto di Velocità
Velocità Media
Il concetto di velocità ci permette di dare una valutazione quantitativa
della rapidità con cui questo spostamento è avvenuto: ciò è definito dal
vettore velocità media
∆r
. r2 − r1
=
vm =
t2 − t1
∆t
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
16 / 76
Velocità
Velocità
Velocità (Istantanea)
Se l’intervallo ∆t diventa sempre più piccolo, il vettore spostamento, e
di conseguenza il vettore velocità media, tendono ad essere tangenti
alla traiettoria nel punto A1 . La velocità istantanea, o semplicemente
velocità è definita da:
∆r . d r(t)
.
v(t) = lim
=
∆t→0 ∆t
dt
Dunque il vettore velocità è definito come la derivata del vettore
posizione rispetto al tempo.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
17 / 76
Velocità
Velocità
Interpretazione Geometrica del Vettore Velocità
Ad ogni punto r(t) della traiettoria - identificato dal corrispondente
istante di tempo t - possiamo associare il vettore velocità v(t), che
risulta sempre tangente alla traiettoria stessa.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
18 / 76
Velocità
Componenti del Vettore Velocità
Componenti Cartesiane
A partire dal vettore posizione scritto in componenti cartesiane
r(t) = x(t) i + y(t) j
otteniamo il vettore velocità applicando le regole di derivazione (vettori
di base fissi)
dx(t)
dy(t)
. d r(t)
v(t) =
=
i+
j = vx (t) i + vy (t) j
dt
dt
dt
Ovvero le componenti cartesiane del vettore velocità si ottengono
derivando le corrispondenti componenti del vettore posizione
vx (t) =
ML Ruggiero (DIFIS)
dy(t)
dx(t)
≡ ẋ , vy (t) =
≡ ẏ
dt
dt
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
19 / 76
Velocità
La Variazione della Velocità
La velocità è tangente alla traiettoria descritta da un punto in moto.
Quando la traiettoria non è una retta c’è in ogni caso una variazione
del vettore velocità. In generale, essendo la velocità un vettore, essa
può variare perchè
varia la sua direzione e verso
varia il suo modulo
o per entrambi i suddetti motivi
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
20 / 76
Accelerazione
Sommario
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
21 / 76
Accelerazione
Accelerazione
Variazione del Vettore Velocità
La variazione nel tempo del vettore velocità è descritta dal vettore
accelerazione
∆v
d v(t)
.
a(t) = lim
≡
∆t→0 ∆t
dt
Le componenti cartesiane del vettore accelerazione sono date da
dvy (t)
dvx (t)
. d v(t)
=
i+
j = ax (t) i + ay (t)j
a(t) =
dt
dt
dt
ovvero derivando le corrispondenti componenti del vettore velocità:
ax (t) =
ML Ruggiero (DIFIS)
dvy (t)
dvx (t)
≡ ẍ , ay (t) =
≡ ÿ
dt
dt
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
22 / 76
Calcolo Vettoriale
Vettori
Sommario
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
23 / 76
Calcolo Vettoriale
Vettori
Grandezze Vettoriali
Le grandezze vettoriali sono rappresentate da segmenti orientati e
caretterizzate da modulo (lunghezza del segmento), direzione e verso;
in alcuni casi è rilevante il punto di applicazione (vettori applicati).
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
24 / 76
Calcolo Vettoriale
Vettori
Componenti e Lunghezza di un Vettore
Componenti Tridimensionali
Rispetto alla base canonica {i, j, k} di un sistema cartesiano
tridimensionale, un generico vettore si può scrivere nella forma
a = ax i + ay j + az k
Essendo la corrispondenza biunivoca, il vettore è individuato
univocamente dalla coordinate, quindi a ≡ (ax , ay , az ).
Lunghezza
I vettori vivono nello spazio euclideo, quindi ad essi è possibile
associare la lunghezza, applicando il Teorema di Pitagora
q
.
|a| = a = a2x + a2y + a2z
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
25 / 76
Calcolo Vettoriale
Vettori
Direzione e Versori
Direzione
La direzione del vettore è determinata dai coseni direttori (αx , αy , αz )
che la retta cui esso appartiene, e concorde in verso, descrive con gli
assi cartesiani
cos αx =
ax
,
a
cos αy =
ay
,
a
cos αz =
az
a
Versori
Dato un vettore a, è possibile ottenere da esso un versore, ovvero un
vettore di lunghezza unitaria, concorde in direzione e verso
a a a ay
az
. ax
y
z
x
ua =
i+ j+ k≡
, ,
a
a
a
a a a
In particolare, sono versori i ≡ (1, 0, 0), j ≡ (0, 1, 0), k ≡ (0, 0, 1).
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
26 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Sommario
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
27 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Moltiplicazione di un Vettore per uno Scalare
Moltiplicando un vettore a per un numero (o scalare) ξ si ottiene un
vettore
ξa = a′ , se 0 < ξ < 1
ξa = a′′ , se ξ > 1
ξa = a′′′ , se ξ < 0
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
28 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Somma di Vettori
Come si sommano due vettori?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
29 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Somma di Vettori
Due vettori si sommano con la regola del parallelogramma
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
30 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Differenza di Vettori
Come si fa la differenza fra due vettori?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
31 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Differenza di Vettori
Analogamente, si scrive a − b = a + (−b).
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
32 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Differenza di Vettori
Analogamente, si scrive a − b = a + (−b).
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
33 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Componenti Cartesiane di un Vettore
Le componenti di un vettore nel piano rispetto alla base {i, j} hanno
una semplice interpretazione trigonometrica.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
34 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Componenti Cartesiane di un Vettore
Le componenti di un vettore nel piano rispetto alla base {i, j} hanno
una semplice interpretazione trigonometrica:
ax = a cos α,
ML Ruggiero (DIFIS)
ay = a sin α
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
35 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Operazioni con le Componenti di un Vettore
Coordinate cartesiane a ≡ (ax , ay )
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
36 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Operazioni con le Componenti di un Vettore
Coordinate cartesiane b ≡ (bx , by )
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
37 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Operazioni con le Componenti di un Vettore
c = a + b → (cx , cy ) = (ax + bx , ay + by )
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
38 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.1
Una punto materiale si trova all’istante t1 nel punto avente coordinate
P1 (1, 1, 1), mentre all’istante t2 si trova in P2 (3, −1, 1).
(1) Calcolare i vettore posizione r(t1 ) e r(t2 ); (2) calcolare lo
spostamento r(t2 ) − r(t1 ).
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
39 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.2
Un punto materiale si trova all’istante t1 nel punto avente coordinate
P1 (1, 1, 1), mentre all’istante t2 si trova in P2 (3, −1, 1).
(1) Calcolare i vettore posizione r(t1 ) e r(t2 ); (2) calcolare lo
spostamento r(t2 ) − r(t1 ). (3) Calcolare il versore associato al vettore
spostamento.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
40 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.3
Un punto materiale si muove in un piano. All’istante t1 il vettore
posizione ha le componenti r(t1 ) ≡ (1, −1). All’istante t2 il punto ha
subito uno spostamento ∆r ≡ (2, 4).
Quale è il vettore posizione all’istante t2 ?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
41 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.4
Un punto materiale si muove lungo una retta, secondo la legge oraria
r(t) = x(t)i, essendo (i) x(t) = ct + d , (ii) x(t) = et 2 + ft + g, con
c, d , e, f , t costanti.
(1) Calcolare le dimensioni delle costanti c, d , e, f , t; (2) calcolare
velocità e accelerazione nei casi (i) e (ii).
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
42 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.5
Un punto materiale si muove in un piano, secondo la legge oraria
r(t) = x(t)i + y(t)j, essendo x(t) = ct + d , e y(t) = 12 et 2 + ft + g.
Calcolare velocità e accelerazione del punto materiale
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
43 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Scalare
Il prodotto scalare associa ai due vettori a, b il numero (scalare)
a · b = b · a = ab cos α
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
44 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Scalare
Vettori Perpendicolari
Se a⊥b → α = π/2, di conseguenza a · b = ab cos α = 0
Lunghezza di un Vettore
Il prodotto scalare è uguale al quadrato del modulo del vettore, quindi
strettamente legato alla sua lunghezza
√
a · a = a a cos α = a2 → |a| = a = a · a
(ogni vettore è parallelo a se stesso, per cui α = 0).
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
45 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Scalare e Versori di Base
Versori di Base
Il fatto che la base costituita dai vettori di lunghezza unitaria (o versori)
{i, j, k} sia ortonormale, è definito in termini di prodotti scalari:
Lunghezza Unitaria: i · i = j · j = k · k = 1
Ortogonalità: i · j = i · k = j · k = 0
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
46 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Scalare in Termini di Componenti
Se due vettori sono dati in componenti rispetto ai vettori di base {i, j}
a = ax i + ay j,
b = bx i + by j
il loro prodotto scalare risulta essere
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
47 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Scalare in Termini di Componenti
Se due vettori sono dati in componenti rispetto ai vettori di base {i, j}
a = ax i + ay j,
b = bx i + by j
il loro prodotto scalare risulta essere
a·b = (ax i + ay j)·(bx i+by j) = (ax bx i · i + ax by i · j + ay bx j · i + ay by j · j)
Utilizzando le proprietà dei versori di base
i·i=j·j =1
i·j=0
Si ottiene
a · b = ax bx + ay by
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
47 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Scalare in Termini di Componenti
Se due vettori sono dati in componenti rispetto ai vettori di base {i, j}
a = ax i + ay j,
b = bx i + by j
il loro prodotto scalare risulta essere
a · b = ax bx + ay by
ovvero la somma dei prodotti delle componenti omologhe. Se abbiamo
vettori nello spazio tridimensionale dati in componenti rispetto ai vettori
di base {i, j, k}
a = ax i + ay j + az k,
b = bx i + by j + bz k
si ottiene analogamente
a · b = ax bx + ay by + az bz
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
48 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Scalare e Angolo fra Vettori
Siano
a = ax i + ay j + az k,
b = bx i + by j + bz k
Il prodotto scalare è espresso dalla due relazioni equivalenti
a · b = a b cos α,
a · b = ax bx + ay by + az bz
Uguagliandole si ottiene
a b cos α = ax bx + ay by + az bz
q
q
da cui, ricordando che a = a2x + a2y + a2z , b = bx2 + by2 + bz2
cos α = q
ML Ruggiero (DIFIS)
ax bx + ay by + az bz
q
a2x + a2y + a2z bx2 + by2 + bz2
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
49 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Vettoriale
Definizione
Il prodotto vettoriale associa a due vettori a, b un vettore
c = a × b = a ∧ b tale che
Il modulo di c è dato da c = ab sin α.
La direzione di c è perpendicolare alla direzione di a e b, ovvero
al piano definito da a e b
Il verso è tale che osservando dalla punta di c si deve vedere a
sovrapporsi a b ruotando in senso antiorario per un angolo minore
di 180 gradi (regola della mano destra, della vita levogira...)
Il prodotto vettoriale non è commutativo: a × b = −b × a. Il prodotto
vettoriale di vettori paralleli è nullo.
Se c = a × b, c · a = c · b = 0.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
50 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Vettoriale
Regola della mano destra: a si sovrappone su b ruotando in senso
antiorario.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
51 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Vettoriale
Regola della mano destra: b si sovrappone su a ruotando in senso
antiorario.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
52 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Prodotto Vettoriale e Componenti
Versori
Applicando la definzione, si ottengono le seguenti relazioni per il
prodotto vettoriale dei versori di base {i, j, k}:
i × j = −j × i = k, j × k = −k × j = i, k × i = −i × k = j
i×i =j×j=k×k=0
Applicando queste proprietà al prodotto fra due vettori
a = ax i + ay j + az k,
b = bx i + by j + bz k
si ottiene che il vettore c = a × b ha componenti
cx
cy
cz
ML Ruggiero (DIFIS)
= ay bz − az by
= az bx − ax bz
= ax by − ay bx
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
53 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.6
Dati i vettori (espressi in componenti cartesiane nello spazio
tridimensionale)
a ≡ (1, 2, 4) ,
b ≡ (1, −1, 2) ,
c ≡ (1, 1/2, m)
Si calcoli s = a + b; si dica quanto deve valere m affinché c e s siano
paralleli.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
54 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.7
Dati i vettori (espressi in componenti cartesiane nello spazio
tridimensionale)
v ≡ (1, 1, 1) ,
w ≡ (2, 0, 0) ,
p ≡ (1, 1, 0)
Si calcolino i versori associato a v e a w; si calcoli l’angolo formato da
wep
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
55 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.8
Un signore decide di andare a piedi da Mosca a Pechino, percorrendo
la strada di lunghezza minore. Schematicamente, egli mantiene un
passo costante di circa 4 chilometri all’ora.
Sapendo che le le coordinate di Mosca sono 55o N, 37o E, e quelle di
Pechino sono 35o N e 104o E, quanto tempo impiega, trascurando le
indispensabili soste per riposarsi?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
56 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.9
Un camion sta procedendo in autostrada, in un tratto rettilineo, con
una velocità costante di 30 metri al secondo. Una utilitaria viaggia sul
medesimo tratto, ai 110 chilometri orari.
Sapendo che il camion è lungo 10 metri, quanto tempo impiega
l’utilitaria a sorpassarlo? Quanta strada percorre nel frattempo?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
57 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.10
Un motociclista parte da fermo e, in un tratto rettilineo di 45 metri,
raggiunge la velocità di 108 chilometri orari.
Quanto tempo ha impiegato?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
58 / 76
Calcolo Vettoriale
Operazioni con i Vettori
Esercizio 1.11
Nel meccanismo in figura A e B sono due cerniere per le aste OA e
AB che hanno uguale lunghezza l. A partire da t = 0, nella
configurazione in cui α = 0, B viene avvicinata a O, muovendola con
velocita’ costante v.
Calcolare: (1) L’angolo α in funzione del tempo (2) Le componenti
della velocita’ e dell’accelerazione della cerniera A lungo l’asse x.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
59 / 76
Basi Intrinseche, Moto Circolare
Sommario
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
60 / 76
Basi Intrinseche, Moto Circolare
Versore Tangente e Versore Normale
Versore Normale
Se γ è la traiettoria del punto materiale, in ogni suo punto possiamo
definire il versore tangente τ (s) ed il il versore normale n(s), che è
ortogonale a τ (s) e diretto dalla parte dove si trova il centro di
curvatura. I versori (τ, n) costituiscono una base (nello spazio
tangente T(P), che dipende unicamente dalla traiettoria (e dunque dal
moto) di P: essa prende il nome di base intrinseca.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
61 / 76
Basi Intrinseche, Moto Circolare
Cerchio Osculatore
Per ogni P ∈ γ, esiste il cerchio osculatore, di centro C e raggio PC
tangente a γ in P: in altri termini la traiettoria γ è approssimata da una
successione di cerchi osculatori, tangenti ad essa in P, P ′ , P ′′ , P ′′′ , ...,
e di raggio |C − P|, |C ′ − P ′ |, |C ′′ − P ′′ |, |C ′′′ − P ′′′ |...
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
62 / 76
Basi Intrinseche, Moto Circolare
Componenti Intrinseche di Velocità e Accelerazione
Velocità
La velocità è esprimibile nella forma:
v ≡vτ
Accelerazione
Rispetto alla base intrinseca, l’accelerazione si scrive nella forma:
a = v̇ τ +
ML Ruggiero (DIFIS)
v2
n
R
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
63 / 76
Basi Intrinseche, Moto Circolare
Esempio: Moto Uniforme Descritto nella Base Intrinseca
E’ uniforme un moto in cui il modulo della velocità si mantiene costante
v ≡ |v| = |ṡ| = cost..
Di conseguenza, rispetto alla Base Intrinseca, le componenti della
velocità e dell’accelerazione risultano essere
Velocità: v = vτ
Accelerazione: a =
v2
Rn
Inoltre, se il moto è circolare e uniforme allora l’ascissa curvilinea è
data da s = Rθ, con R costante e θ che corrisponde all’angolo al
centro della circonferenza: il punto descrive archi di circonferenza
uguali in tempi uguali. Derivando rispetto al tempo la s = Rθ, si ottiene
.
ṡ = R θ̇: la quantità costante ω = θ̇ si chiama velocità angolare. Allora,
essendo v = ωR, le relazioni precedenti diventano
Velocità: v = Rωτ
Accelerazione: a = Rω 2 n
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
64 / 76
Basi Intrinseche, Moto Circolare
Esempio: Moto Circolare Uniforme
Un punto materiale viaggia su una traiettoria circolare, ovvero sulla
circonferenza di raggio R, con velocità costante.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
65 / 76
Basi Intrinseche, Moto Circolare
Esempio: Moto Circolare Uniforme, Base Intrinseca
In particolare, quando il punto si muove da P a P’, l’ascissa curvilinea
varia da s, a s′ , in modo che s′ − s = Rθ.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
66 / 76
Basi Intrinseche, Moto Circolare
Esempio: Moto Circolare Uniforme, Base Intrinseca
Il vettore n è sempre diretto verso il centro della circonferenza; inoltre
risulta v = Rωτ e a = Rω 2 n.
In particolare, l’accelerazione è detta centripeta, ha modulo a = Rω 2 ,
mentre la velocità ha modulo v = Rω.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
67 / 76
Basi Intrinseche, Moto Circolare
Esercizio 1.12
L’orbita della Luna attorno alla Terra è approssimativamente circolare e
ha il raggio di circa 384 000 km (circa 60 volte il raggio della Terra). Il
periodo è di circa 27.3 giorni.
Si determini l’accelerazione centripeta della Luna rispetto alla Terra e
si descrivano le componenti di velocità e accelerazione, al variare del
tempo.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
68 / 76
Basi Intrinseche, Moto Circolare
Esercizio 1.13
Le lancette delle ore e dei minuti sono sovrapposte a mezzogiorno.
Dopo quanto tempo lo saranno nuovamente?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
69 / 76
Basi Intrinseche, Moto Circolare
Esercizio 1.14
Un ciclista impegnato a battere il record dell’ora, si muove su una pista
perfettamente circolare di raggio pari a 30 metri. Egli parte da fermo e,
accelerando uniformemente, impiega il primo giro per raggiungere la
velocità di 60 chilometri orari.
(1) Quanto tempo impiega per percorrere il primo giro? (2) Si calcoli il
modulo della velocità dopo 5 secondi; (3) Si calcoli il modulo
dell’accelerazione dopo 5 secondi.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
70 / 76
Basi Intrinseche, Moto Circolare
Esercizio 1.15
Due punti materiali sono vincolati a muoversi su una guida circolare di
raggio R. All’istante to , i punti occupano la stessa posizione e si
muovono con velocita’ di modulo v1 e v2 , in verso opposto.
(1) Dopo quanto tempo si incontrano? (2) Quale e’ l’arco di traiettoria
percorso da ciascuno dei due punti?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
71 / 76
Basi Intrinseche, Moto Circolare
Esercizio 1.16
L’angolo che descrive un punto materiale, in moto lungo una traiettoria
circolare di raggio R, ha la seguente espressione θ(t) = θ0 + ωt + αt 2 .
(1) Calcolare la velocità angolare. (2) Calcolare l’accelerazione
angolare; (3) Sapendo che la velocità angolare iniziale vale π/s, e che
dopo 2 secondi la velocità angolare è pari a 3/2π/s, determinare le
costanti ω e α.
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
72 / 76
Basi Intrinseche, Moto Circolare
Esercizio 1.17
Un punto nel piano xOy si muove con la legge oraria
(1)x(t) = a cos ωt,
y(t) = b cos ωt
(2)x(t) = a cos ωt,
y(t) = b sin ωt
Determinare la traiettoria in entrambi i casi
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
73 / 76
Basi Intrinseche, Moto Circolare
Esercizio 1.18
La pista di un aeroporto è lunga 1 chilometro. Un aereo, per decollare,
deve raggiungere la velocità di 200 chilometri orari, partendo da fermo.
Quanto deve valere l’accelerazione minima ed il tempo di decollo?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
74 / 76
Basi Intrinseche, Moto Circolare
Esercizio 1.19
Un treno si muove, in un rettilineo, con velocità vo costante. Ad un
tratto, il macchinista vede il rosso di un semaforo, ed impiega un tratto
s per fermarsi.
Quanto vale l’accelerazione media am (1) se a = a0 , (2) se a = a0 t?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
75 / 76
Basi Intrinseche, Moto Circolare
Esercizio 1.20
Lungo una pista circolare, un’automobilina si muove in modo che lo
spazio percorso sia descritto dalla legge s = γt 3 . Sia R il raggio della
pista.
(1) Calcolare l’angolo percorso al variare del tempo; (2) Calcolare la
velocità. (3) Dopo quanto tempo la componente tangenziale
dell’accelerazione uguaglia quella normale?
ML Ruggiero (DIFIS)
Esercitazione 1: Cinematica e Vettori
E1.2010/2011
76 / 76