Introduzione alla sensorica e all’attorica
Anno accademico 2008/2009
Serie d’esercizi 2
Esercizio 1: Funzione di trasferimento
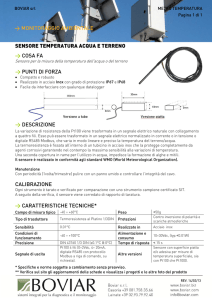
Uno strumento di misura della forza a catena a blocchi seriali distinguibili è formato da:
1. un sensore di forza,
2. un blocco di messa in forma del segnale d’uscita,
3. un amplificatore del segnale d’uscita,
4. un filtro passa-basso.
IN
Sensore
di Forza
Messa in
forma
Amplificatore
Filtro
OUT
passa-basso
Il sensore di forza non ha offset e possiede una sensibilità di 0.1 [V/N] con un punto di saturazione a 100 [N].
Il blocco di messa in forma del segnale d’uscita addiziona un bias per evitare errori
di non linearità dell’amplificatore.
L’amplificatore ha un guadagno di 10 [-] costante su tutta la banda tra la frequenza
di taglio inferiore (10 [Hz]) e la frequenza di taglio superiore (1000 [Hz]).
Il filtro passa-basso è composto da una resistenza da 1 [kΩ] in serie all’uscita
dell’amplificatore e da un condensatore C.
1. Identificare graficamente il “Gabarit” della curva di calibrazione del sensore.
2. Considerando che si vuol misurare una forza di forma sinusoidale e di ampiezza massima di 80 [N], determinare il segnale di bias necessario sapendo che bisogna considerare un margine di 1[V] sulla tensione DC minima
da addizionare di caduta sulla componentistica associata al blocco di messa in forma.
3. Volendo ridurre la frequenza di taglio superiore a 150 [Hz], calcolare il valore del condensatore C.
Esercizio 2: Isteresi
In una catena di montaggio, si vuole realizzare un sistema che permetta la conta
dei pezzi in fabbricazione. Con un sensore ad induzione si vuole realizzare un dispositivo per determinare il passaggio di ogni pezzo.
Per eliminare il segnale di rumore generato dalle vibrazioni durante il trasporto dei
pezzi, si utilizza un trasduttore con isteresi che permette di rendere la misura completamente insensibile a piccoli spostamenti dei pezzi sul nastro trasportatore.
Il sensore sarà utilizzato come sensore “tutto o niente” a soglia, sfruttando l’isteresi
del dispositivo.
Sapendo che l’isteresi del sensore è di +/- 1 [mm] e che la vibrazione è espressa
dalla seguente equazione:
Vib = (vel * lung) / pes
Dove: Vib è la vibrazione in [mm], vel è la velocità di trasporto in [m/min], lung è la
lunghezza del pezzo in [mm] nella direzione dello spostamento e pes è il suo peso
in [grammi].
1. Determinare la caratteristica tensione/spostamento del sensore idealizzandolo ad un comparatore con isteresi.
2. Considerando un peso di ogni pezzo di 0.5 [kg] per una lunghezza del pezzo nella direzione dello spostamento di 10 [cm], determinare la velocità
massima ammissibile.
3. Ammettendo di far variare la soglia di isteresi da +/- 1 [mm] a +/- 10 [mm] a
passi di un millimetro, mantenendo la lunghezza a 10 [cm] e la velocità
massima ammissibile calcolata al punto 2, di quanto varierà il peso massimo trasportabile?
Esercizio 3: Errore di non linearità
Un sensore di coppia dovrebbe avere una caratteristica lineare, purtroppo a causa
di drift dovuto a cambiamenti degli stress meccanici, la sua caratteristica si è alterata.
La curva di calibrazione originale era data dall’equazione:
Out_segnal = Torque/100
A causa del drift questa caratteristica si vede modificata come segue:
Out_segnal = Torque/100 + Torque2/10000
1. Rappresentare la curva di calibrazione originale e quella modificata dal drift.
2. Ammettendo di avere una coppia che varia sinusoidalmente ad una frequenza di 0.1 [Hz] con un’ampiezza di 20 [N] ed un valore medio di 60 [N],
determinare e rappresentare il segnale d’uscita del sensore con e senza
l’influenza del drift.