Moto armonico semplice
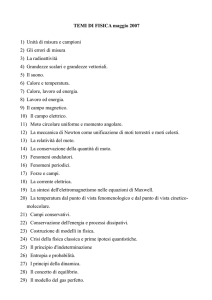
Consideriamo il sistema presentato in figura in
cui un corpo di massa m si muove lungo l’asse
delle x sotto l’azione della molla ideale di
costante elastica k ed in assenza di forze
dissipative, la massa m si muoverà avanti ed
indietro lungo x compiendo un moto oscillatorio
periodico. Dalla seconda legge di Newton abbiamo
Ricordiamo ora che a è legata ad x (derivata seconda) ed otteniamo
L’equazione ottenuta è l’equazione rappresentativa del moto armonico
semplice (MAS) ed è caratterizzata da avere coefficiente unitario per la
derivata seconda, essere omogenea ed avere il segno + fra i due termini.
A.A. 2014/15
Fisica 1
1
La soluzione di questa equazione risulta essere
In cui A e φ sono due costanti che dipendono dalle condizioni iniziali del
moto (la loro origine sta nel fatto che per risolvere la derivata seconda
dobbiamo integrare due volte) e rappresentano rispettivamente l’ampiezza
massima del moto oscillatorio (A) e la fase iniziale (φ), mentre ω è la
pulsazione ed è legata alle caratteristiche del moto dalla relazione
Ricordando che la funzione trigonometrica coseno ha periodo 2π, si ottiene
che il moto si ripete dopo un tempo T, detto periodo, che vale
Analizziamo ora meglio il significato di quanto appena ricavato
A.A. 2014/15
Fisica 1
2
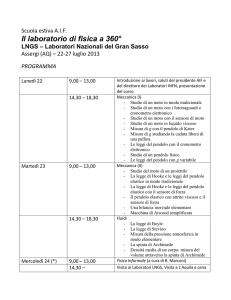
La figura mostra due moti oscillatori semplici con uguale fase e uguale
periodo, la differenza sta nell’ampiezza dei moti che è x’m per la curva
rossa e xm per la curva azzurra.
La figura mostra due moti oscillatori semplici con uguale fase e uguale
ampiezza, la differenza sta nel periodo dei moti che è T per la curva rossa
e T’ per la curva azzurra (in particolare è T = 2T’).
A.A. 2014/15
Fisica 1
3
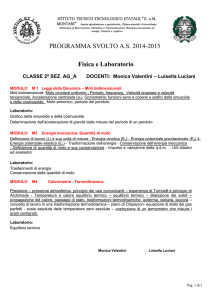
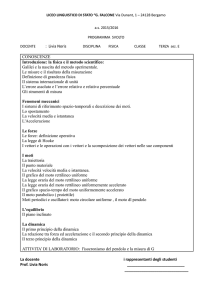
La figura mostra due moti oscillatori semplici con uguale ampiezza e
periodo, la differenza sta nella fase dei moti che è φ = -π/4 per la curva rossa
e φ = 0 per la curva azzurra.
Cerchiamo ora di vedere se la x(t) proposta come soluzione effettivamente
soddisfa l’equazione del moto trovata. Abbiamo che
x(t) = A cos( ωt + φ)
dx
= v(t) = −Aω sin( ωt + φ)
dt
d2x
= a(t) = −Aω 2 cos( ωt + φ) = −ω 2 x(t)
2
dt
Vediamo così che effettivamente la x(t) proposta soddisfa l’equazione.
Ci resta ora da vedere come determinare le costanti A e φ presenti in x(t).
€
A.A. 2014/15
Fisica 1
4
Abbiamo già detto che queste due costanti dipendono dalle condizioni iniziali
del moto, allora supponiamo che il moto del sistema (molla + massa) abbia
inizio all’istante t0 = 0 con v(0) = 0 e x(0) = xm e introduciamo queste
informazioni nelle equazioni appena trovate.
Vediamo quindi che, con le condizioni iniziali del moto appena date, la legge
oraria diviene
Se invece che da una soluzione con il coseno fossimo partiti da una con la
funzione seno, avremmo trovato la medesima ampiezza per il moto, e una
fase iniziale di π/2, pari allo sfasamento tra le due funzioni trigonometriche.
Analizziamo ora il processo dal punto di vista energetico. Ricordiamo che,
non essendoci forze dissipative in gioco, il sistema deve risultare
conservativo per quanto riguarda l’energia meccanica.
A.A. 2014/15
Fisica 1
5
Abbiamo
Ricordando ora che
Otteniamo
L’energia ottenuta è una costante e dipende solo dalla molla e dall’ampiezza
iniziale del moto; essa rappresenta l’energia dell’oscillatore armonico.
A.A. 2014/15
Fisica 1
6
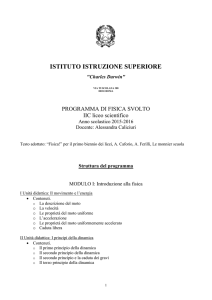
In pratica in funzione della deformazione della molla abbiamo che sia EK
che Ep hanno un’andamento parabolico tale che la loro somma sia sempre
costante ed uguale a Em.
In questo modo il moto è limitato agli x compresi tra -xm ed xm. Infatti
superare questi due punti implica una EK negativa (impossibile). Notiamo
che Ep = 0 per x = 0 (molla a riposo) mentre Ep = EpMAX per x = ± xm;
EK = 0 per x = ± xm e EK = EKMAX per x = 0.
Dal punto di vista temporale invece abbiamo la situazione seguente
A.A. 2014/15
Fisica 1
7
Esaminiamo ora altri casi di moto armonico semplice (MAS). Iniziamo con
il caso del pendolo semplice.
Consideriamo il sistema rappresentato in figura
e costituito da un corpo, di massa m e dimensioni
trascurabili, sospeso ad una trave tramite una fune
ideale di lunghezza L.
Spostiamo il pendolo dalla verticale, mantenendolo nel piano della pagina, e
lasciamolo libero. Il pendolo inizierà ad oscillare attorno alla verticale ed il
suo moto, in assenza di attriti, è periodico. Analizziamo il moto.
Sulla massa m agiscono due forze: la forza di
gravità Fg e la tensione della fune T.
Scomponiamo il moto in moto tangenziale ed in
moto normale.
Analizziamo prima il moto tangenziale cui è dovuta
l’oscillazione.
A.A. 2014/15
Fisica 1
8
Scriviamo la seconda legge di Newton
Se ora limitiamo il moto alle piccole oscillazioni, cioé consideriamo θ ≤ 15o,
possiamo approssimare sinθ con θ, quindi
Otteniamo così che, per piccole oscillazioni, il moto del pendolo semplice
è un MAS. La legge oraria del moto del pendolo è
θ( t ) = θ 0 cos( ωt + φ)
con θ0 e φ costanti dipendenti dalle condizioni iniziali del moto.
Il periodo del moto risulta indipendente dalla massa del pendolo quindi
€ fune lunga L hanno lo stesso periodo (isocronismo)
tutti i pendoli con
A.A. 2014/15
Fisica 1
9
Esaminiamo ora il problema dal punto di vista energetico.
O
θ0
y0
y
Il sistema è conservativo in quanto le forze
agenti o sono conservative (forza di gravità)
o non compiono lavoro (T è sempre ⊥ allo
spostamento)
L
θ
B’
C’
B
W g = mgy 0 − mgy = ΔE K
C
1
mv 2
2
y 0 − y = B'C' = OC' −OB' = L(cosθ − cosθ 0 )
mgy 0 − mgy =
Infine per la velocità del pendolo si ha
€
In particolare se θ0 = π/2, v = √2gL. Va notato che l’espressione trovata
per la velocità del pendolo è sempre valida, non essendo ricorsi ad alcuna
approssimazione per θ.
A.A. 2014/15
Fisica 1
10
Vediamo ora cosa avviene in direzione normale. Notiamo innanzitutto che
la massa m descrive un arco di circonferenze e pertanto dovrà essere
sottoposta ad una forza centripeta. Dalla seconda legge di Newton si ha
Quindi la tensione della fune non è costante, varia in funzione dell’angolo
θ. Ricordando ora il risultato ottenuto in precedenza per la velocità del
pendolo, abbiamo
La relazione ottenuta è stata ricavata senza ricorrere all’approssimazione di
piccole oscillazioni e quindi è sempre valida.
A.A. 2014/15
Fisica 1
11
Esempi ed esercizi
Un punto materiale di massa m è appeso ad una molla di costante elastica k.
Detta x = 0 la posizione dell’estremo della molla quando il punto materiale è
staccato, la posizione di equilibrio statico vale xS.
Si tira il punto materiale fino alla posizione x = 2xS e lo si abbandona al
tempo t0 = 0 con v0 = 0.
Determinare, per il punto materiale, x(t), v(t), a(t) e la posizione del
centro di oscillazione.
Determiniamo innanzitutto la posizione di equilibrio del
sistema (le forze dissipative sono trascurabili)
-kx
0
mg
xS
mg − kx = 0 ⇒ x S =
m
2x
k
S
mg
x
Quando il sistema è in moto, ad un istante generico è
€
A.A. 2014/15
Fisica 1
d2x
m 2 = mg − kx
dt
d2x k
+ x=g
2
dt
m
12
L’equazione ottenuta non è omogenea, tuttavia rappresenta un moto
armonico semplice di pulsazione ω2 = (k/m). La soluzione di questa
equazione sarà la somma della soluzione dell’equazione omogenea ad essa
associata e di una soluzione particolare xP, costante, data da g/ω2.
xP =
Quindi xP equivale ad xS
g
mg
=
= xS
2
ω
k
€ otteniamo per A e φ
Dalle condizioni iniziali
Infine
mg
(1 + cos ωt) = x(t) − x S = x S cos ωt
k
mgω
v(t) = −
sin ωt
k
a(t) = −g cos ωt = −ω 2 ( x(t) − x S )
x(t) =
A.A. 2014/15
€
Fisica 1
13
Il centro di oscillazione è dato dalla posizione di equilibrio statico xS, esso
si può determinare ponendo a(t) = 0, oppure cercando il valore massimo
della velocità.
2
a(t) = 0 = −ω ( x(t) − x S )
x centr.oscill. = x S
v(t) = v MAX ⇒ sin ωt = 1
π m
t centr.oscill. =
2 k
mg
x( t c.o. ) =
= xS
k
Infine si può notare che ω non dipende dalle condizioni iniziali del moto,
come è giusto che sia.
€
A.A. 2014/15
Fisica 1
14
Il pendolo fisico o composto
Il pendolo semplice appena trattato è un caso limite, nella realtà si ha a che
fare con pendolo in cui la parte massiva è di dimensioni non trascurabili,
si parla allora di pendolo fisico o pendolo composto.
In questo caso, avendo a che fare con un corpo
rigido, dovremo ricorrere alla seconda
equazione cardinale.
∑M
ext
= Iα
Come punto fisso per il calcolo dei momenti
è naturale scegliere il punto di sospensione O.
€
L’unica forza con un momento diverso da 0 rispetto ad O è la forza di
gravità, che risulta essere una forza di richiamo in quanto tende a riportare
il corpo rigido alla posizione di equilibrio stabile lungo la verticale.
A.A. 2014/15
Fisica 1
15
M = −mgh sin θ
M = Iα
d 2θ
I 2 = −mgh sin θ
dt
Infine, ricorrendo all’approssimazione delle piccole oscillazioni (sinθ ≈ θ),
troviamo
€
d 2θ mgh
+
θ=0
2
I
dt
Quindi, nelle ipotesi fatte, il pendolo composto è un oscillatore armonico.
Se ora ricordiamo che ogni momento d’inerzia può essere visto come il
prodotto della massa€ del corpo rigido per un fattore che dipende solo dalla
geometria del corpo (raggio giratore K) elevato al quadrato (I = mK2),
otteniamo
d 2θ gh
+ 2θ=0
2
dt
K
A.A. 2014/15
Fisica 1
€
16
Quindi la pulsazione ed il periodo del pendolo composto risultano essere
gh
K2
ω = 2 e T = 2π
gh
K
2
Il pendolo fisico equivale ad un pendolo semplice avente lunghezza L’
(lunghezza ridotta).€
2
L' =
O
C
A.A. 2014/15
K
h
Il pendolo di torsione
€ figura qui a lato mostra un pendolo di torsione
La
che ruota tra –θm e θm in un piano perpendicolare al
filo di sospensione. Il filo esercita un momento sul
disco proporzionale al suo coefficiente di torsione
χ; sia inoltre I il momento d’inerzia del disco
rispetto all’asse OC
Fisica 1
17
d 2θ
I 2 = −χθ
dt
d 2θ χ
+ θ=0
2
I
dt
Il moto risultante è un moto armonico semplice (va notato che non si è fatta
alcuna approssimazione nel ricavare le equazioni del moto) con pulsazione
€
e periodo dati da
ω2 =
χ
I
e T = 2π
I
χ
Noto quindi il coefficiente di torsione χ della fune, è possibile, misurando
il periodo, ricavare il momento d’inerzia del disco (o del corpo rigido
€
appeso alla fune).
A.A. 2014/15
Fisica 1
18