CORNELIUS
ESHER
CORNELIUS ESHER
CORNELIUS ESHER
GRADI DI LIBERTA’
Il numero di gradi di libertà di punto materiale è il numero di
quantità indipendenti necessarie per determinare
univocamente la sua posizione nello spazio (coordinate).
Un punto libero di muoversi nello spazio a 3 dimensioni ha
quindi 3 gradi di libertà; se il punto deve muoversi su un piano
(2 dimensioni) ha 2 gradi di libertà; se deve muoversi lungo
una retta o una curva (1 dimensione) ha 1 grado di libertà.
Una massa attaccata ad un pendolo può muoversi lungo la
superficie di una sfera, quindi 2 gradi di libertà. Una massa
poggiata su un piano e attaccata ad un punto fisso ha 1 grado di
libertà perché può muoversi solo lungo una circonferenza.
Sistemi di n punti: se tutti i punti sono liberi nello spazio, il
sistema avrà 3n gradi di libertà. Se presentif vincoli, i gradi di
libertà scendono a 3n - f.
ESEMPIO DI G. di L.
Come esempio, si può
dimostrare che un corpo
rigido ha 6 gradi di libertà,
3 di tipo traslazionale
(rispetto ai 3 assi
cartesiani x-y-z) e tre di
tipo rotazionale (sempre
rispetto ai 3 assi
cartesiani).
ESEMPIO DI G. di L.
ESEMPIO DI G. di L.
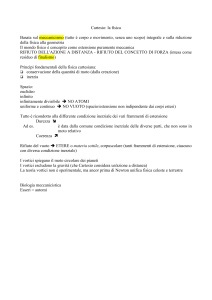
Per determinare univocamente la posizione di un corpo rigido basta
conoscere la posizione di 3 punti A, B, C non allineati. Infatti ogni altro
punto D si può determinare nel modo seguente: considerato il triangolo
ACD, la base AC è fissata; il punto D ha distanza fissata da A e C, e ha una
certa distanza da B. Ruotando il triangolo ACD, si perviene alla posizione
D' che si trova alla stessa distanza di D da B. Tuttavia, D' si trova dalla
parte opposta rispetto al piano ABC, quindi esiste solo un punto D che
abbia una distanza fissata da A, B, e C e che si trovi da un lato fissato del
piano ABC.
Ora, è chiaro che il sistema di punti ABC ha 9 - f gradi di libertà, dove f è
il numero di vincoli. Poiché le distanze AB, BC e AC devono rimanere
costanti, ne consegue che f = 3 e quindi il corpo ha 6 gradi di libertà.
S.R. INERZIALE
Si definisce sistema di riferimento, l'insieme dei riferimenti
o coordinate utilizzate per individuare la posizione di un
oggetto nello spazio
Un sistema di riferimento inerziale è un sistema di
riferimento in cui è valido il primo principio della dinamica.
Con un'accettabile approssimazione è considerato inerziale
il sistema solidale con il Sole e le stelle (il cosiddetto
sistema delle stelle fisse), ed ogni altro sistema che si
muova di moto rettilineo uniforme rispetto ad esso (e che
quindi né acceleri né ruoti): in questo modo si viene a
definire una classe di equivalenza per questi sistemi.
S.R. INERZIALE
La Terra non è un vero e proprio sistema di questo tipo, a
causa dei suoi movimenti di rivoluzione e di rotazione. In
particolare, il moto di rotazione sottopone gli oggetti sulla
sua superficie lontani dai poli a una piccola forza centrifuga.
Tuttavia questa accelerazione è irrilevante in certi casi, per
cui la Terra è un sistema di riferimento che approssima un
sistema di riferimento inerziale.
Il moto di rotazione sottopone inoltre i corpi lontani
dall'equatore alla forza di Coriolis, che devia verso destra il
moto di tutti i corpi dell'emisfero nord e verso sinistra quelli
dell'emisfero sud, come dimostrato dal famoso pendolo di
Foucault.
SISTEMA DI RIFERIMENO
Si definisce sistema di riferimento, l'insieme dei
riferimenti utilizzati per individuare la posizione di un
oggetto nello spazio.
Sistema di riferimento monodimensionale
Sistemi di riferimento bidimensionale
Sistemi di riferimento tridimensionale (3D)
VERSORE
In matematica, un versore è un vettore in uno spazio di
riferimento con modulo unitario, utilizzato per
indicare una particolare direzione e verso.
Dato un qualunque vettore (diverso dal vettore nullo
che è l'unico ad avere modulo pari a zero) è possibile
formarne un versore dividendo per il suo modulo:
SISTEMI DI RIFERIMENTO
TRIDIMENSIONALE
Il sistema rettangolare (o cartesiano) : un punto
e’ individuato dalla proiezione lungo i tre assi
Il sistema cilindrico (o polare) : il punto e’
proiettato sul piano x,y e qui definito in
coordinate polari. La terza coordinata e’ ottenuta
dalla proiezione sull’asse z
Il sistema sferico: come quello cilindrico,con la
differenza che la terza coord e’ l’angolo rispetto
asse z
IL SISTEMA CARTESIANO
Si indica con x il numero reale che
individua la distanza di un punto
dal piano individuato dalle rette Y
e Z misurata parallelamente
all'asse X nell'unità di misura
scelta per quest'ultimo asse. Si
definiscono analogamente y e z. Le
tre coordinate che individuano un
punto nello spazio sono indicate
con la simbologia (x,y,z).
j
k
i
Se i valori assunti sono tutti 1, si individuano i versori
del sistema di riferimento
S.R. POLARE
Un sistema di riferimento polare è formato da due coordinate
indicate con le lettere ρ e φ. Con ρ si indica la distanza del
punto considerato dall'origine del sistema; in pratica se
consideriamo il vettore che congiunge l'origine degli assi
con il nostro punto, ρ ne indica il modulo. Con φ, invece, ci
si riferisce all'angolo o anomalia che si forma tra il
vettore considerato prima, e il verso positivo dell'asse X di
un normale sistema ortogonale. Dunque, è il raggio e un
angolo orientato.
S.R. POLARE
IL SISTEMA CILINDRICO
Considerando un generico punto P, e la sua
proiezione Q sul piano XY, la coordinata z
indica la distanza PQ. Con ρ si denota la
distanza dall'origine del punto Q, mentre φ
individua l'angolo che si forma tra il
vettore ρ e l'asse X.
CILINDRICO
CARTESIANO
CARTESIANO
CILINDRICO
IL SISTEMA SFERICO
Si considera sempre un generico punto P e
la sua proiezione sul piano XY chiamata Q.
Con ρ questa volta si indica la distanza di P
dall'origine e θ è l'angolo che forma con
l'asse Z. Indichiamo invece con il vettore
che collega l'origine con il punto Q, φ
individua l'angolo che quest'ultimo vettore
forma con l'asse X.
FORZE APPARENTI
Forza che un osservatore solidale con un sistema
di riferimento non inerziale (cioè che si muove di
moto non rettilineo uniforme rispetto ad un altro
sistema di riferimento inerziale, che ruota o
accelera rispetto ad esso) vede come agente, al
pari delle altre forze (forze effettive o forze
reali), ma che non deriva da alcuna interazione
fisica diretta, ma trae piuttosto origine
dall'accelerazione del sistema di riferimento
medesimo.
FORZE APPARENTI
Come prescritto dalla legge F = ma, le forze
apparenti sono proporzionali alle masse e alle
accelerazioni dei corpi su cui agiscono. In parole
più semplici una forza apparente è una forza che
agisce su un corpo anche se non vi viene applicata
direttamente.
Come esempio si pensi alla forza di Coriolis. E’
una forza apparente, a cui risulta soggetto un
corpo quando si osserva il suo moto da un
sistema di riferimento che sia in moto
circolare rispetto a un sistema di riferimento
inerziale.
FORZA DI CORIOLIS
In assenza di forze esterne, il corpo si
muoverà di moto rettilineo uniforme, se
osservato da un sistema di riferimento
inerziale, svincolato dal disco;
se osservato da un sistema di riferimento
solidale con il disco in rotazione, invece,
sembrerà percorrere una traiettoria curva.
In questo secondo caso, l'osservatore
concluderà che sull'oggetto agisce una
forza.
Come se ci fosse una forza trasversale alla direzione del moto
(di Coriolis). E’ una "forza apparente", poiché dipendente dal
moto dell'osservatore rispetto al riferimento inerziale, e non
dall'azione di qualche altro oggetto o di un campo di forze.
MOTO DI UN CORPO RIGIDO
P
Sfruttando l’ipotesi di
rigidità, possiamo
studiare il moto di un
corpo rigido come il
moto di un sistema di
riferimento ad esso
solidale.
y1
z1
z0
x1
y0
x0
S0
S1
TRASLAZIONE
Il caso unidimensionale (traslazione dei sistemi di
riferimento e moto dei corpi nella stessa direzione)
Il caso BIdimensionale (traslazione dei sistemi di
riferimento e moto dei corpi nel piano)
Il caso TRIdimensionale (traslazione dei sistemi di
riferimento e moto dei corpi nello spazio)
TRASLAZIONE
UNIDIMENSIONALE
TRASLAZIONE
UNIDIMENSIONALE
Mara e Carlo stanno viaggiando nello stesso pullman. Mara vede Carlo
fermo rispetto a se stessa e rispetto al pullman e lo stesso è per Carlo.
TRASLAZIONE
UNIDIMENSIONALE
Mara e Carlo stanno viaggiando nello stesso pullman. Mara vede Carlo
fermo rispetto a se stessa e rispetto al pullman e lo stesso è per Carlo.
Un osservatore che vede passare il pullman attribuisce a Mara e Carlo
la stessa velocità del pullman (50 km/h)
Mara lancia ora a Carlo un dolce a 15 km/h.
Un’osservatrice che cammina in bicicletta
nella stessa direzione del pullman a 10 km/h
dirà che Mara e Carlo hanno una velocità
pari a 50-10=40 km/h mentre il dolce ha la
velocità di 15+50-10=55 km/h
UNIDIMENSIONALE
Poiché tutto avviene in un’unica direzione le grandezze in gioco
possono essere trattate come grandezze scalari.
Se si indica con xa la posizione del corpo in movimento (biscottino,
Mara o Carlo) rispetto ad un sistema di riferimento fisso (detto anche
assoluto), con xr la stessa posizione ma rispetto al sistema di
riferimento in moto, cioè solidale con il pullman, (detto sistema
relativo) e con xo la posizione del sistema relativo rispetto a quello
assoluto si ha:
xa = xr + xo
xo
xr
xa
derivando
va = vr + vo
Derivando ancora
aa = ar + ao
aa = ar + ao
Si osservi che l’accelerazione osservata nel sistema di riferimento
relativo è diversa da quella osservata nel sistema assoluto.
Si può infatti ricavare facilmente
ar = - ao + aa
Nei due sistemi di riferimento si osserveranno variazioni diverse
della velocità.
Da tutto ciò nascono le così dette forze fittizie.