Fondamenti di Automatica
Elementi di Teoria dei Sistemi
Dott. Ing. Marcello Bonfè
Dipartimento di Ingegneria - Università di Ferrara
Tel. +39 0532 974839
E-mail: [email protected]
pag. 1
Fondamenti di Automatica – 1.2 Sistemi
Elementi di Teoria dei Sistemi
DEFINIZIONI
pag. 2
Fondamenti di Automatica – 1.2 Sistemi
Sistemi e Segnali
SISTEMA (o PROCESSO): oggetto o dispositivo
o fenomeno il cui comportamento si manifesta
attraverso la variazioni nel tempo di un certo
numero di attributi misurabili
Sistema
VARIABILI MISURABILI: caratteristiche di un
sistema che si possono esprimere con uno o più
numeri (interi, reali o complessi)
pag. 3
Fondamenti di Automatica – 1.2 Sistemi
Sistemi e Segnali - 1
MODELLO MATEMATICO: relazioni che
intercorrono tra le variabili misurabili di un sistema
SISTEMA ORIENTATO: sistema le cui variabili
misurabili si distinguono in:
– Cause, o stimoli, o INGRESSI
– Effetti, o risposte, o USCITE
u1
u2
ur
u1
u2
…
ur
pag. 4
Sistema
Orientato
= u(t): INGRESSO
y1
y2
ym
y1
y2
…
ym
= y(t): USCITA
Fondamenti di Automatica – 1.2 Sistemi
Sistemi e Segnali - 1a
NOTA: non sempre la suddivisione tra Cause o
INGRESSI ed Effetti o USCITE è univoca…
Es.: INGRESSO: tensione.. o corrente?
Es.: Motore.. o generatore?
pag. 5
Fondamenti di Automatica – 1.2 Sistemi
Sistemi e Segnali - 2
SISTEMA ORIENTATO: rappresentazione grafica
con segnali vettoriali (N.B.: il tempo è continuo)
u(t)
u1
u2
…
ur
Sistema
Orientato
= u(t): VETTORE DI INGRESSO
(o VETTORE DEGLI INGRESSI)
y1
y2
…
ym
pag. 6
y(t)
= y(t): VETTORE DI USCITA
(o VETTORE DELLE USCITE)
Fondamenti di Automatica – 1.2 Sistemi
Sistemi e Segnali - 3
SEGNALI ANALOGICI: rappresentati da numeri
reali associati ad un istante del tempo (il tempo è
variabile in modo continuo)
pag. 7
Fondamenti di Automatica – 1.2 Sistemi
Sistemi e Segnali - 3
SEGNALI DISCRETI: rappresentati ancora da
numeri reali, ma associati ad una successione di
istanti di numeri interi, rappresentativi del tempo
pag. 8
Fondamenti di Automatica – 1.2 Sistemi
Sistemi e Segnali - 4
SEGNALI DIGITALI: segnali discreti ed inoltre
rappresentati da numeri interi, così da poter
essere memorizzati in stringhe di bit (digit)
digitale
pag. 9
Fondamenti di Automatica – 1.2 Sistemi
Sistemi e Segnali - 5
SISTEMA DISCRETO: i segnali misurabili sono
associati ad una successione di numeri interi detti
PASSI, generalmente (ma non necessariamente)
rappresentativi di istanti di tempo multipli di un intervallo
fissato, detto periodo di campionamento:
u(tk)
Sistema
Orientato
y(tk)
u(tk) (o semplicemente u(k)): VETTORE DI INGRESSO
y(tk) (o semplicemente y(k)): VETTORE DI USCITA
pag. 10
Fondamenti di Automatica – 1.2 Sistemi
Sistemi e Segnali - 6
NOTAZIONE:
– Derivata di un segnale rispetto al tempo:
– Ove necessario, per semplificare si userà anche:
– Integrazione di un segnale rispetto al tempo (x(t0)=0):
pag. 11
Fondamenti di Automatica – 1.2 Sistemi
Teoria dei Sistemi
Disciplina complementare ai Controlli Automatici, che
studia i modelli matematici dei sistemi e le loro proprietà:
– deduzione del modello matematico:
• modellistica (applicazione di leggi fisiche, biologiche, ecc.)
• identificazione (applicazione di algoritmi numerici data-driven)
– utilizzo del modello matematico:
• analisi della risposta
• analisi di controllabilità e osservabilità
• analisi di stabilità
Controlli Automatici:
– utilizzo del modello matematico:
• sintesi di una funzione di ingresso (catena aperta)
• sintesi di un controllore in catena chiusa
pag. 12
Fondamenti di Automatica – 1.2 Sistemi
Sistemi Dinamici (a tempo continuo)
La risposta y(t) di un sistema ad un certo istante è o non è
univocamente determinata dall’ingresso u(t) allo stesso
istante di tempo?
NO? Il sistema è un SISTEMA DINAMICO
pag. 13
Fondamenti di Automatica – 1.2 Sistemi
Sistemi Dinamici (a tempo discreto)
La risposta y(k) di un sistema ad un passo è o non è
univocamente determinata dall’ingresso u(k) allo stesso
passo?
NO? Il sistema è un SISTEMA DINAMICO
pag. 14
Fondamenti di Automatica – 1.2 Sistemi
Sistemi Dinamici (e non..)
E quando la risposta ai quesiti precedenti è SÌ? Il sistema
viene detto privo di memoria o puramente algebrico (o
combinatorio, nel caso digitale)
Esempio 1: Resistenza elettrica (N.B.: ingresso? uscita?)
Esempio 2: Le spese dell’anno k sono proporzionali al
reddito dello stesso anno..
pag. 15
Fondamenti di Automatica – 1.2 Sistemi
Sistemi Dinamici (e non..) - 1
Se invece il sistema è dinamico, viene detto dotato di
memoria (appunto), perché la sua risposta dipende anche
dall’andamento degli ingressi agli istanti precedenti
Esempio 1:
Esempio 2: Le scorte di magazzino del mese k dipendono
da quelle del mese k-1, dalla quantità di merce prodotta e
dalla quantità venduta..
pag. 16
Fondamenti di Automatica – 1.2 Sistemi
Variabili di Stato
Sono la memoria del sistema dinamico, cioè le
informazioni da conoscere in t0 per determinare
in relazione a
Rappresentano l’effetto della storia passata, cioè
precedente a t0, sul comportamento futuro
La dimensione n del vettore delle variabili di stato
viene definita ordine del sistema
x1
x2
…
xn
pag. 17
= x(t): VETTORE DI STATO
Fondamenti di Automatica – 1.2 Sistemi
Sistemi dinamici a dimensione infinita
CASO PIU’ GENERALE (ma non trattato nel
seguito): lo stato non è un vettore di n elementi,
ma una funzione dipendente da una o più variabili
Esempio: diffusione del calore in una barra isolata
riscaldata ad un estremo Î stato = T(z,t)
N.B.: se si considerassero solo le temperature in n punti
equidistanti lungo l’asse z, sarebbe un sistema a dim. finita
pag. 18
Fondamenti di Automatica – 1.2 Sistemi
Alcune definizioni importanti
Modello matematico di un sistema dinamico:
–
–
–
–
–
insieme dei tempi T
insieme degli ingressi U
insieme delle funzioni di ingresso Uf
insieme degli stati X
insieme delle uscite Y
Per sistemi a tempo continuo (T
) si usano equazioni
differenziali, in generale NONLINEARI:
x(t), u(t) e y(t) sono vettori e f(.) e g(.) sono vettori di funzioni nonlineari.
f() è detta funzione di velocità di transizione dello stato
g() è detta funzione di uscita
pag. 19
Fondamenti di Automatica – 1.2 Sistemi
Modelli differenziali vettoriali
pag. 20
Fondamenti di Automatica – 1.2 Sistemi
Modelli differenziali vettoriali - 1
I vettori
sono, rispettivamente, i vettori di
• Stato:
x(t)
X, X=Rn
• Ingresso:
u(t)
U, U=Rr
• Uscita:
y(t)
Y, Y=Rm
all’ istante t ∈ T=R
pag. 21
Fondamenti di Automatica – 1.2 Sistemi
Alcune definizioni importanti - 1
Per sistemi a tempo discreto (T
alle differenze finite:
) si usano equazioni
x(k), u(k) e y(k) sono vettori e f(.) e g(.) sono vettori di funzioni nonlineari.
f() è detta funzione dello stato futuro
g() è detta funzione di uscita
Sistemi puramente algebrici (senza stato):
o
Sistemi puramente dinamici:
o
pag. 22
Fondamenti di Automatica – 1.2 Sistemi
Alcune definizioni importanti - 1a
Proprietà di separazione:
Parte dinamica
Parte algebrica
x(t)
u(t)
y(t)
u(t)
MANCA nei sistemi puramente dinamici
Parte dinamica: permette di riassumere la storia passata del sistema
tramite le sue variabili di stato ad un certo istante t
Parte algebrica del sistema: esprime l’uscita del sistema utilizzando tutte
le informazioni note all’istante t
pag. 23
Fondamenti di Automatica – 1.2 Sistemi
Alcune definizioni importanti - 2
Sistemi dinamici stazionari (o tempo-invarianti): le funzioni
di stato / uscita non dipendono esplicitamente dal tempo
o
Sistemi dinamici lineari: U, Uf, X, Y, sono spazi vettoriali
definiti sullo stesso campo (es. ) e le funzioni f() e g()
sono lineari in x e u per ogni t
o
pag. 24
Fondamenti di Automatica – 1.2 Sistemi
Alcune definizioni importanti - 3
Matrici caratteristiche dei sistemi lineari:
Í N.B.: quadrata
Sistemi dinamici lineari e stazionari (o lineari tempoinvarianti, LTI):
o
pag. 25
Fondamenti di Automatica – 1.2 Sistemi
Alcune definizioni importanti - 4
Sistemi Multi-Ingresso Multi-Uscita (o Multi-Output, MIMO)
m>1er>1
Sistemi Singolo-Ingresso Multi-Uscita (SIMO)
m>1er=1
Sistemi Multi-Ingresso Singola-Uscita (MISO)
m=1er>1
Sistemi Singolo-Ingresso Singola-Uscita (SISO)
m=1er=1
pag. 26
Fondamenti di Automatica – 1.2 Sistemi
Riassumendo: classificazione dei modelli
Î o Lineare Tempo-Invariante (LTI)
pag. 27
Fondamenti di Automatica – 1.2 Sistemi
Riassumendo: classe di modelli più apprezzata
D = 0 nei sistemi
puramente dinamici
pag. 28
Fondamenti di Automatica – 1.2 Sistemi
Risposta di un sistema dinamico (a tempo continuo)
La soluzione dell’equazione differenziale:
che si suppone esista e sia unica, è del tipo:
e si definisce funzione di transizione dello stato
Tale funzione ha le seguenti proprietà:
– Orientamento nel tempo: è definita per
, non
necessariamente per
Implica
– Causalità:
– Consistenza:
pag. 29
Fondamenti di Automatica – 1.2 Sistemi
Risposta di un sistema dinamico - 1
Proprietà della funzione di transizione dello stato (cont.):
– Composizione: (congruenza tra due transizioni successive)
se
Î
pag. 30
Fondamenti di Automatica – 1.2 Sistemi
Risposta di un sistema dinamico - 2
Sostituendo la funzione di transizione dello stato nella
funzione di uscita:
si ottiene la funzione di risposta:
e si passa dal modello differenziale ingresso-stato-uscita
al modello ingresso-stato-uscita nel quale sono fissate le
condizioni iniziali su x(t0)
Î
pag. 31
Fondamenti di Automatica – 1.2 Sistemi
Elementi di Teoria dei Sistemi
MODELLAZIONE DI SISTEMI INGEGNERISTICI
pag. 32
Fondamenti di Automatica – 1.2 Sistemi
Modellazione di sistemi ingegneristici
I sistemi ingegneristici sono costituiti da elementi fisici,
possibilmente di natura eterogenea ed interagenti.
In base alla natura del (sotto-)sistema si applicano le basi
teoriche di specifiche discipline:
– Circuiti elettrici ed elettronici Î Elettronica/Elettrotecnica
– Strutture meccaniche Î Meccanica
– Fluidi e trasferimenti termici Î Termo-fluidodinamica
I modelli matematici si ottengono applicando le leggi della
fisica ed opportune ipotesi semplificative:
– Caratteristiche fisiche (resistenze elettriche, masse, elasticità, ecc)
concentrate in uno o pochi punti, anziché distribuite
– Relazioni di proporzionalità (lineari) anziché nonlineari
Î Modelli lineari a parametri concentrati
pag. 33
Fondamenti di Automatica – 1.2 Sistemi
Sistemi ingegneristici: dai modelli alla progettazione
pag. 34
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: le leggi di Kirchhoff
La somma delle tensioni in una maglia è nulla
La somma delle correnti in un nodo è nulla
v2
i2
v1
v3
v1= v2 + v3 + v4
pag. 35
v4
i1
i3
i4
i1 + i2 + i3 +i4 = 0
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: elementi di base
Resistenze elettriche: legge di Ohm
Teoricamente:
– Resistenza pura (relazione V-I lineare)
– Resistenza costante
pag. 36
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: elementi di base - 1
Realmente:
– Resistenze nonlineari
– Capacità/induttanze parassite di collegamento
– Resistenze variabili (es. effetti termici)
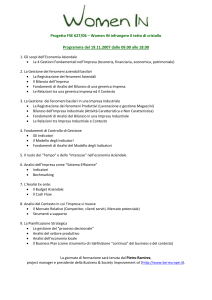
Pin Through-Hole (PTH)
pag. 37
Surface-Mount Device (SMD)
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: elementi di base - 2
Codici di classificazione resistenze per colore
pag. 38
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: elementi di base - 3
Condensatori: accumulatori di carica elettrica
Tensione ai capi del condensatore (teorica):
pag. 39
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: elementi di base - 4
Condensatori, realmente:
– Capacità nonlineari
– Resistenze/induttanze parassite di collegamento
Pin Through-Hole (PTH)
Surface-Mount Device (SMD)
pag. 40
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: elementi di base - 5
Induttori, legge di Faraday:
tale f.e.m. si oppone alla variazione di flusso
magnetico nel circuito.
Si definisce (auto-)induttanza:
Supponendo L costante:
e la tensione indotta opposta alla f.e.m.:
pag. 41
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: elementi di base - 6
Induttori, realmente: qualsiasi circuito elettrico nel
quale ci siano avvolgimenti di filo…
Motore elettrico
Trasformatori,
Relè,…
Bobine di filtraggio
pag. 42
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: elementi di base - 7
Trasformatore
di energia elettrica
Idealmente (N1 = spire primario, N2 = spire secondario)
pag. 43
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: elementi di base - 8
Sorgenti ideali di tensione e corrente:
pag. 44
Fondamenti di Automatica – 1.2 Sistemi
Modelli di circuiti elettrici: elementi di base - 9
Le unità di misura delle grandezze elettriche nel
Sistema Internazionale (SI) sono:
Variabili:
– [v] = V,
Volt;
– [i] = A,
Ampere;
– [Q] = C,
Coulomb;
– [ ] = Wb, Weber;
Parametri:
– [R] = ,
– [L] = H,
– [C] = F,
Ohm;
Henry;
Farad;
pag. 45
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione dei circuiti elettrici
Circuito RC serie (vC(t0)=0)
Kirchhoff
alla maglia
vi = vR + vC
vi(t)
i(t)
R
vR
C
vc(t)
Modello matematico differenziale (u=vi, y=x=vC):
pag. 46
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione dei circuiti elettrici - 1
Circuito RC parallelo (v(t0)=0)
Kirchhoff al
nodo A
i = i R + iC
A
i(t)
iR
iC
R
C
ingresso
v(t)
uscita
Modello matematico differenziale (u=i, y=x=v):
pag. 47
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione dei circuiti elettrici - 2
Circuito RLC serie
(Condizioni iniziali nulle)
Modello matematico differenziale:
pag. 48
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione dei circuiti elettrici - 3
Circuito RLC serie: modello in forma matriciale
con u=vi, y=vC, x1=i, x2=vC (quindi y=x2)
.
x(t)
A
x(t)
C
B
NOTA: D = 0 Î sistema
puramente dinamico
D
pag. 49
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione dei circuiti elettrici - 4
A
Circuito RLC parallelo
(Condizioni iniziali nulle)
Kirchhoff al
nodo A
i = iL+ iR + iC
pag. 50
i(t)
iL
iR
L
R
ingresso
iC
C
vc(t)
uscita
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione dei circuiti elettrici - 5
Circuito RLC: modello in forma matriciale
con u=i, y=vC, x1=vC, x2=iL, (quindi y=x1)
.
x(t)
A
C
pag. 51
x(t)
D
B
NOTA: D = 0 Î sistema
puramente dinamico
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione dei circuiti elettrici - 6
Circuito complesso:
pag. 52
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione dei circuiti elettrici - 7
Circuito complesso: modello matriciale
B
A
C
pag. 53
NOTA: D ≠ 0 Î sistema
dinamico, non puramente
Fondamenti di Automatica – 1.2 Sistemi
Considerazioni modellistiche ed energetiche
Nei modelli matematici dei circuiti elettrici, le
variabili di stato sono sempre associate alla
presenza di condensatori e induttori
Tali elementi immagazzinano energia tramite,
rispettivamente, accumulo di cariche elettriche e
induzione di flusso magnetico.
STATO ÍÎ ENERGIA
Un condensatore carico ha una certa energia
potenziale (liberata quando il condensatore si scarica)
La corrente in un induttore ha una certa energia
cinetica (cariche elettriche in movimento)
pag. 54
Fondamenti di Automatica – 1.2 Sistemi
Considerazioni modellistiche ed energetiche - 1
Energia (E): quantità di lavoro che un certo
sistema (particella di massa/carica) può svolgere
Lavoro (W): forza applicata (meccanica o
elettrica) per spostamento (di particelle di massa
o cariche elettriche), o anche variazione di
energia cinetica (di masse o cariche)
Potenza (P): lavoro per unità di tempo (dW/dt)
In ogni contesto fisico, esistono sempre due
variabili il cui prodotto esprime la potenza in un
certo istante (es. P = v i, P = F v, …)
pag. 55
Fondamenti di Automatica – 1.2 Sistemi
Considerazioni modellistiche ed energetiche - 2
Nelle resistenze NON c’è accumulo di energia,
ma dissipazione di potenza, in quanto:
P=vi
Î
P = i2 R = v 2 / R
Nella pratica, la potenza dissipata si trasforma in
calore emesso dal circuito elettrico e aumento di
temperatura delle resistenze (che potrebbe
determinare anche una variazione di R)
Se l’obiettivo del modello è SOLO il circuito
elettrico, tale potenza è genericamente dispersa
all’esterno del sistema considerato (e non più
considerata…)
pag. 56
Fondamenti di Automatica – 1.2 Sistemi
Considerazioni modellistiche ed energetiche - 3
Nel condensatore:
Î
Nell’induttore:
Î
N.B.: Nell’induttore, ricordando
si può esprimere l’energia anche come:
Questa formulazione più generica si applica
anche in altri casi di variazione del flusso..
pag. 57
Fondamenti di Automatica – 1.2 Sistemi
Considerazioni modellistiche ed energetiche - 4
Le variabili da scegliere preferibilmente, dal punto
di vista fisico, come stato sarebbero la carica nei
condensatori e il flusso negli induttori
Con ipotesi di linearità e per pratica ingegneristica
(misure!), è più intuitivo utilizzare la tensione ai
capi dei condensatori e la corrente negli induttori
La scelta delle variabili di stato è arbitraria!
Come vedremo, tale scelta non influisce sulle
proprietà strutturali del modello matematico, ma
solo sull’espressione delle sue equazioni
pag. 58
Fondamenti di Automatica – 1.2 Sistemi
Circuiti elettrici: riassumendo
Resistenze:
pag. 59
Fondamenti di Automatica – 1.2 Sistemi
Circuiti elettrici: riassumendo - 1
Condensatori:
pag. 60
Fondamenti di Automatica – 1.2 Sistemi
Circuiti elettrici: riassumendo - 2
Induttori:
pag. 61
Fondamenti di Automatica – 1.2 Sistemi
Circuiti elettrici: esempio e analisi energetica
Circuito LC puro (idealmente senza effetti resistivi)
Se il condensatore ha inizialmente una Vc(0) ≠ 0, esso si
scarica con una certa corrente verso l’induttanza
Nell’induttanza però, la corrente non si annulla quando il
condensatore è scarico, quindi quest’ultimo verrà ricaricato, MA
con tensione di segno opposto (fino a -Vc(0)!)
Solo a questo punto, la corrente nell’induttanza diventa nulla e il
ciclo si ripete con tutte le variabili di segno opposto…
pag. 62
Fondamenti di Automatica – 1.2 Sistemi
Circuiti elettrici: esempio e analisi energetica - 1
NOTA: andamento sinusoidale della tensione,
andamento cosinusoidale della corrente..
pag. 63
Fondamenti di Automatica – 1.2 Sistemi
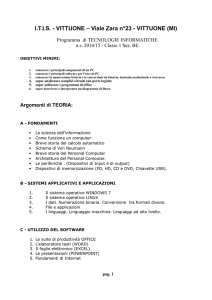
Circuiti elettrici: esempio e analisi energetica - 2
Graficando l’energia dei due elementi:
1.4
x 10
-6
NOTA: l’energia totale è
perfettamente costante,
MA rimbalza tra il
condensatore e la
induttanza!
1.2
energy (J)
1
0.8
0.6
0.4
Inductor energy
Capacitor energy
Total energy
0.2
0
pag. 64
0
1
2
3
time (s)
4
5
6
x 10
-4
Fondamenti di Automatica – 1.2 Sistemi
Circuiti elettrici: esempio e analisi energetica - 3
Introducendo un elemento resistivo…
La tensione dei due elementi accumulatori di energia non è più
istantaneamente identica e la differenza è tanto maggiore
quanto più è elevata la corrente sulla resistenza
La resistenza dissipa l’energia conservata inizialmente nel
condensatore, per cui il campo magnetico generatosi
nell’induttanza non riuscirà a ricaricare completamente il
condensatore con carica opposta a quella iniziale..
pag. 65
Fondamenti di Automatica – 1.2 Sistemi
Circuiti elettrici: esempio e analisi energetica - 4
L’andamento di tensione e corrente non è più
puramente sinusoidale, ma tende a 0 per t Æ ∞
5
Inductor current * 500 (A)
Capacitor voltage (V)
4
3
2
1
0
-1
-2
-3
-4
-5
0
0.2
0.4
0.6
time (s)
pag. 66
0.8
1
x 10
-3
Fondamenti di Automatica – 1.2 Sistemi
Circuiti elettrici: esempio e analisi energetica - 5
L’energia totale del circuito tende anch’essa a 0
1.4
x 10
-6
Inductor energy
Capacitor energy
Total energy
1.2
energy (J)
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
time (s)
1
x 10
pag. 67
-3
Fondamenti di Automatica – 1.2 Sistemi
Circuiti elettrici: esempio e analisi energetica - 6
Cosa è successo? Ovviamente l’energia mancante si
disperde nella resistenza (dissipazione termica, non
visibile dalle variabili elettriche)
0.012
Nota: tende al valore iniziale dell’energia
immagazzinata nel condensatore!
Power dissipated by R
power (W)
0.01
0.008
1.4
0.006
1.2
-6
Energy dissipated by R
1
energy (J)
0.004
0.002
0
x 10
0
0.2
0.4
0.6
time (s)
0.8
0.8
0.6
1
x 10
-3
0.4
0.2
Facendo l’integrale rispetto al tempo
pag. 68
0
0
0.2
0.4
0.6
time (s)
0.8
1
x 10
-3
Fondamenti di Automatica – 1.2 Sistemi
Analisi energetica e stabilità
Il comportamento del circuito LC puro si può definire
stabile, poiché non c’è una divergenza verso l’infinito
delle variabili considerate
Nel circuito RLC la stabilità è ancora più interessante,
perché tutte le variabili tendono ad un valore ben
definito (zero!) per t Æ ∞
Formalmente, il circuito LC si dice semplicemente
stabile, quello RLC asintoticamente stabile
La stabilità asintotica è ottenuta grazie agli effetti
dissipativi della resistenza
Qualunque sia il numero di elementi di un circuito elettrico,
la presenza di resistenze è sempre necessaria per
garantire la stabilità asintotica!
pag. 69
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici
Si considerano masse in movimento traslatorio e
rotatorio nello spazio, per effetto di forze applicate
Le rotazioni sono provocate da una forza applicata
a certa distanza dall’asse di rotazione (forza per
distanza = momento della forza, anche detto
impropriamente coppia)
La somma vettoriale delle forze applicate ad un
corpo ne determina l’accelerazione (legge di Newton)
f4
f5
f1
f2
pag. 70
Î Free Body Diagram (FBD)
f
f3
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici - 1
La legge di Newton
, definendo
forza inerziale, è analoga alle leggi di Kirchhoff!
(somma delle forze = 0)
Spostamenti traslazionali sono sempre relativi ad
un riferimento fisso, evidenziabile con schema
circuitale:
pag. 71
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici: elementi di base
Masse:
Teoricamente:
– Relazione lineare
– Massa costante e concentrata in un punto
pag. 72
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici: elementi di base - 1
Molle:
Teoricamente:
– Molla pura (senza massa o effetti di smorzamento)
– Relazione lineare
– Elasticità (K) costante
pag. 73
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici: elementi di base - 2
Realmente:
– La molla ha massa e smorzamento
– K non è lineare rispetto allo spostamento
Forza
Rottura
della molla
Spostamento
Compressione
totale della molla
pag. 74
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici: elementi di base - 3
Smorzatore (damper): simbologia e relazione
matematica, nell’ipotesi di smorzamento viscoso,
cioè dovuto all’attrito (proporzionale alla velocità)
pag. 75
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici: elementi di base - 4
Smorzatore (damper) realmente:
– Il pistone ha una certa massa non trascurabile
– Il fluido introduce effetti elastici
pag. 76
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici: elementi di base - 5
Analogamente per sistemi in moto rotatorio:
– Forze
Coppie
– Masse
Momenti di inerzia (o Inerzie)
c(t), ω(t)
J
c(t), θ1(t)
c(t), ω1(t)
pag. 77
K
B
c(t), θ2(t)
c(t), ω2(t)
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici: elementi di base - 6
Trasmissione del moto (trasformatori…)
Riduttore
c1(t), ω1(t)
c2(t), ω2(t)
In un riduttore ideale (senza perdite per attrito e con accoppiamento perfetto tra gli
ingranaggi), la velocità viene ridotta del fattore kr
Poiché in questo meccanismo la potenza entrante deve essere uguale a quella uscente
la coppia risulta amplificata.
pag. 78
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici: elementi di base - 7
Trasmissione del moto (trasformatori…)
Altri elementi:
Cinghia/puleggia
Camma
pag. 79
Vite a ricircolazione di sfere
Biella/manovella
Fondamenti di Automatica – 1.2 Sistemi
Modelli di sistemi meccanici: elementi di base - 8
Le unità di misura delle grandezze meccaniche nel sistema SI sono:
Variabili:
[f] = N, Newton;
[x] = m, metri;
= m/sec, velocità;
= m/sec2, accelerazione.
Variabili (caso rotatorio):
[c] = N m;
[ ] = rad;
= rad/sec;
= rad/sec2.
Parametri:
[M] = kg, chilogrammi;
[K] = N/m, coefficiente di rigidezza;
[B] = N sec/m, coefficiente
di attrito viscoso.
Parametri (caso rotatorio):
[J] = kg m2;
[K] = Nm /rad, coefficiente di
rigidezza torsionale;
[B] = Nm sec/rad, coefficiente di
attrito torsionale.
N.B.: più precisamente, i radianti sono numeri puri (rapporto tra lunghezza di un arco
e lunghezza del raggio di tale arco), quindi senza unità di misura…
Nel SI sono definiti unità di misura derivata (o ausiliaria)
pag. 80
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione di sistemi meccanici
Gruppo massa-molla-smorzatore (verticale):
Free
Body
Diagram
pag. 81
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione di sistemi meccanici - 1
Gruppo massa-molla-smorzatore (verticale,
Ponendo x1 = z, x2 = v, u=F e y = z
pag. 82
Fondamenti di Automatica – 1.2 Sistemi
):
Esempi di modellazione di sistemi meccanici - 2
Gruppo massa-molla-smorzatore (verticale),
modello matriciale:
B
A
C
D
N.B.: l’ingresso (la forza F) nel caso considerato sarà sempre diverso da zero, per
via della forza peso F = M g, dovuta all’accelerazione di gravità g…
pag. 83
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione di sistemi meccanici - 3
Sospensione di un autoveicolo:
F.B.D.
pag. 84
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione di sistemi meccanici - 4
Sospensione di un autoveicolo:
.
.
Ponendo x1 = z1, x2 = z1, x3 = z2, x4 = z2 e
y = [z1 z2]T
pag. 85
Fondamenti di Automatica – 1.2 Sistemi
Esempi di modellazione di sistemi meccanici - 5
Sospensione di un autoveicolo, modello
B
A
matriciale:
NOTA: D = 0 Î sistema
puramente dinamico
C
pag. 86
Fondamenti di Automatica – 1.2 Sistemi
Considerazioni modellistiche ed energetiche
Nei modelli matematici dei sistemi meccanici, la
legge di Newton impone equazioni differenziali di
secondo grado, dalle quali si determinano
posizioni e velocità come variabili di stato
Anche nei sistemi meccanici, vi sono elementi che
immagazzinano energia: le masse in movimento
(energia cinetica) e le molle compresse (energia
potenziale)
In questo contesto, la potenza è espressa dal
prodotto tra forza (coppia) applicata e velocità:
P=Fv oP=
pag. 87
Fondamenti di Automatica – 1.2 Sistemi
Considerazioni modellistiche ed energetiche - 1
Negli smorzatori (ideali) NON c’è accumulo di
energia, ma dissipazione di potenza, in quanto:
P = F v = B v2
L’elemento è analogo ad una resistenza elettrica,
in questo caso la dissipazione di potenza
determina un riscaldamento del fluido nello
smorzatore
Per masse e molle, le analogie sono determinate
dal tipo di energia immagazzinata:
Energia cinetica (
pag. 88
: quantità di moto)
Energia potenziale
Fondamenti di Automatica – 1.2 Sistemi
Considerazioni modellistiche ed energetiche - 2
Dall’analogia tra il tipo di energia accumulata, le
masse sono analoghe agli induttori e le molle ai
condensatori (nonostante le similitudini tra i simboli
grafici possano fare pensare diversamente! Es.
smorzatore Æ condensatore..)
Anche nel caso meccanico, esiste una scelta
alternativa per rappresentare lo stato di una
massa, cioè la quantità di moto
Questa scelta faciliterebbe la modellazione nei
casi in cui la massa non fosse costante (che però
avrebbero modelli matematici nonlineari)
pag. 89
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: riassumendo
Masse/Inerzie:
pag. 90
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: riassumendo - 1
Molle:
pag. 91
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: riassumendo - 2
Smorzatori:
pag. 92
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: esempio e analisi energetica
Sistema massa-molla puro (idealmente senza attriti
e senza gravità)
Se la molla è inizialmente compressa (o estesa), la forza
elastica imprime una accelerazione alla massa
Quando la molla arriva alla sua lunghezza di riposo, la velocità
della massa non si annulla, quindi quest’ultima si muoverà fino
alla posizione pari a quella di compressione (o estensione)
iniziale della molla, MA di segno opposto
Il ciclo si ripete con tutte le variabili di segno opposto…
pag. 93
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: esempio e analisi energetica - a
pag. 94
http://www.upscale.utoronto.ca/GeneralInterest/Harrison/Flash/
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: esempio e analisi energetica - 1
Andamento sinusoidale/cosinusoidale di
posizione e velocità della massa
1
Mass velocity (m/s)
Mass position (m)
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
0
0.5
1
time (s)
1.5
pag. 95
2
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: esempio e analisi energetica - 2
Andamento di energia cinetica della massa ed
energia potenziale della molla
NOTA: l’energia totale è
perfettamente costante,
MA rimbalza tra la massa
e la molla!
0.5
energy (J)
0.4
0.3
0.2
Mass energy
Spring energy
Total energy
0.1
0
pag. 96
0
0.2
0.4
0.6
0.8
1
time (s)
1.2
1.4
1.6
1.8
2
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: esempio e analisi energetica - 3
Introducendo un elemento dissipativo…
Lo smorzatore riduce la forza impressa dalla molla e quindi
l’accelerazione, in misura tanto maggiore quanto più è elevata
la velocità della massa
Pertanto, la massa non riuscirà ad estendere (o comprimere) la
molla nella stessa misura in cui essa è compressa (o estesa)
inizialmente
pag. 97
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: esempio e analisi energetica - 4
L’andamento di posizione e velocità tende a zero
per t Æ ∞
1
Mass velocity (m/s)
Mass position (m)
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
pag. 98
0
0.5
1
time (s)
1.5
2
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: esempio e analisi energetica - 5
L’energia totale nel sistema tende anch’essa a 0
0.5
Mass energy
Spring energy
Total energy
0.45
0.4
energy (J)
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
pag. 99
0
0.5
1
time (s)
1.5
2
Fondamenti di Automatica – 1.2 Sistemi
Sistemi meccanici: analisi energetica e stabilità
Cosa è successo? Ovviamente l’energia mancante si
disperde nello smorzatore, il cui attrito provoca
dissipazione termica
Come per i circuiti LC/RLC, possiamo dire:
– massa-molla: semplicemente stabile
– massa-molla-smorzatore: asintoticamente stabile
In generale, la stabilità asintotica si ottiene grazie
agli effetti dissipativi dell’attrito, senza i quali un
sistema meccanico è al più semplicemente stabile
L’instabilità di un sistema meccanico può essere
causata dalla gravità (che infatti fa cadere gli aerei /)
pag. 100
Fondamenti di Automatica – 1.2 Sistemi
Analogia circuito LC e sistema massa-molla
pag. 101
Fondamenti di Automatica – 1.2 Sistemi
Elenco completo di analoghi elettrici / meccanici
Forza
ÍÎ Tensione
Velocità
ÍÎ Corrente
Traslazioni/Rotazioni ÍÎ Carica elettrica
Quantità di moto
ÍÎ Flusso magnetico
Smorzatori
ÍÎ Resistenze
Masse
ÍÎ Induttori
Molle
ÍÎ Condensatori
pag. 102
Fondamenti di Automatica – 1.2 Sistemi
Analogie tra modelli di sistemi fisici
Struttura generale per la modellazione di circuiti elettrici:
pag. 103
Fondamenti di Automatica – 1.2 Sistemi
Analogie tra modelli di sistemi fisici - 1
Struttura generale per la modellazione di sistemi meccanici:
pag. 104
Fondamenti di Automatica – 1.2 Sistemi
Analogie tra modelli di sistemi fisici - 2
Le analogie e la struttura delle relazioni tra gli elementi di
base di una certa tipologia di sistemi fisici, basate come
detto su considerazioni energetiche, si estendono a
qualunque contesto fisico (termodinamica, fluidodinamica,..)
Ad esempio, nei sistemi fluidodinamici si evidenzia
l’analogia tra:
– Tensione (forza) Æ Pressione
– Corrente (velocità) Æ Portata (o flusso)
Il prodotto di queste due grandezze è ancora una potenza,
esiste la resistenza fluidica e l’accumulo di pressione e
portata (serbatoi)
pag. 105
Fondamenti di Automatica – 1.2 Sistemi
Analogia tra circuiti elettrici ed idraulici
pag. 106
http://www.upscale.utoronto.ca/GeneralInterest/Harrison/Flash/
Fondamenti di Automatica – 1.2 Sistemi
Analogie tra modelli di sistemi fisici - 3
La metodologia di modellazione basata su tali analogie è
supportata dalla notazione grafica detta Bond Graphs (qui
non trattati, ma valida alternativa degli schemi a blocchi)
Nei Bond Graphs, le interconnessioni tra gli elementi sono
attraversate da due soli tipi di variabili, sempre accoppiate:
– Effort (tensione, forza, pressione,…)
– Flow (corrente, velocità, flusso,…)
ed esistono solo tre elementi di base:
– Dissipatori (tipo R: resistenze, smorzatori,…)
– Accumulatori di flow (tipo C: condensatori, molle, …)
– Accumulatori di effort (tipo I: induttori, masse,…)
Tale metodologia di modellazione si estende anche oltre ai
semplici casi di parametri concentrati e relazioni lineari…
pag. 107
Fondamenti di Automatica – 1.2 Sistemi
Interconnessione tra sistemi elettrici e meccanici
Oltre alle analogie, è noto che tramite motori e
generatori elettrici è possibile lo scambio
energetico tra i due contesti fisici:
Circuito
elettrico
Potenza
Elettrica
Accoppiamento
elettromagnetico
Potenza
Meccanica
Sistema
meccanico
L’accoppiamento elettromagnetico avviene grazie
alla presenza simultanea di cariche elettriche in
movimento (corrente) e di un campo magnetico
perpendicolare alla direzione di tale movimento
pag. 108
Fondamenti di Automatica – 1.2 Sistemi
Interconnessione tra sistemi elettrici e meccanici - 1
Principio base di una macchina elettrica a
corrente continua:
pag. 109
http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/motdc.html Fondamenti di Automatica – 1.2 Sistemi
Interconnessione tra sistemi elettrici e meccanici - 2
Macchina a corrente continua ideale Î giratore
Giratore: elemento simile a trasformatori/riduttori, ma che
trasforma la potenza girando il rapporto tra le variabili
associate: NON tensione/forza (analogia al trasformatore
elettrico tensione/tensione), MA tensione/velocità, ecc.
Tensione
Corrente
Velocità
MOTORE
Tensione
Corrente
pag. 110
Forza/Coppia frenante
Velocità
GENERATORE
Forza/Coppia frenante
Fondamenti di Automatica – 1.2 Sistemi
Interconnessione tra sistemi elettrici e meccanici - 3
Relazioni caratteristiche del giratore ideale (caso
rotativo):
ef : tensione contro-elettromotrice (Back
ElectroMotive Force, BEMF)
Cm : coppia meccanica del motore
Il parametro km (per ip. costante) è detta
indifferentemente costante di coppia o anche
costante di BEMF
pag. 111
Fondamenti di Automatica – 1.2 Sistemi
Interconnessione tra sistemi elettrici e meccanici - 4
Nel caso reale un motore elettrico a corrente
contiene intrinsecamente un circuito elettrico
(resistenza / induttanza) ed una struttura
meccanica (inerzia ed attrito):
pag. 112
Fondamenti di Automatica – 1.2 Sistemi
Interconnessione tra sistemi elettrici e meccanici - 5
Modello matematico completo del motore elettrico
a corrente continua (
):
–
–
–
–
ef = BEMF e Cm = coppia motrice (giratore ideale)
Ca = coppia di attrito (viscoso)
Cr = coppia di carico (ingresso di disturbo)
Applicando la legge di Kirchhoff alla maglia + il
bilancio delle coppie all’albero meccanico:
pag. 113
Fondamenti di Automatica – 1.2 Sistemi
Interconnessione tra sistemi elettrici e meccanici - 6
Modello matematico del motore elettrico a corrente
continua in forma matriciale: x1=i, x2=
, u=[v Cr]T
A
B
Le uscite?? Generalmente sia velocità che corrente sono
misurabili, quindi:
pag. 114
C
Fondamenti di Automatica – 1.2 Sistemi
Modellazione di sistemi a tempo discreto
Si ottengono ad esempio (MA NON SOLO) quando un
sistema fisico (a tempo continuo) viene accoppiato ad un
sistema di controllo costituito da un elaboratore digitale
pag. 115
Fondamenti di Automatica – 1.2 Sistemi
Modellazione di sistemi a tempo discreto - 1
Discretizzazione (campionamento): si suppone che
all’ingresso venga applicata una funzione costante a tratti
e che l’uscita venga campionata negli stessi istanti kT in
cui l’ingresso varia
I valori di ad, bd, cd e dd, dipendono da quelli del sistema
continuo (ma ovviamente non sono gli stessi) in base alla
soluzione della corrispondente equazione differenziale,
calcolata nel periodo T.
pag. 116
Fondamenti di Automatica – 1.2 Sistemi
Modellazione di sistemi a tempo discreto - 2
Nel caso MIMO:
pag. 117
Fondamenti di Automatica – 1.2 Sistemi
Modellazione di sistemi a tempo discreto - 3
Esistono anche sistemi discreti, generalmente di natura
più astratta, per i quali NON esiste un corrispondente
sistema a tempo continuo o NON è utile modellarlo
Es. Variazione annuale della popolazione studentesca
all’anno k:
– x1(k), x2(k), x3(k): iscritti al primo, secondo, terzo anno
– u(k), y(k): matricole e laureati
– pi, ri: % di ammessi/non ammessi all’anno successivo
pag. 118
Fondamenti di Automatica – 1.2 Sistemi
Modellazione di sistemi a tempo discreto - 4
Es. Variazione annuale della popolazione studentesca
all’anno k, modello matriciale
pag. 119
Fondamenti di Automatica – 1.2 Sistemi
Modellazione di sistemi discreti a stati finiti
Le variabili di un sistema discreto, ottenuto per
campionamento di un sistema continuo tramite calcolatore
digitale, diventano a valori finiti se memorizzati tramite
stringhe di bit (es: 8 bit Î 28 valori = 256)
Per tali sistemi è comunque conveniente per fini di calcolo
mantenere la rappresentazione matriciale
Altri tipi sistemi discreti a stati finiti, generalmente ottenuti
tramite modelli logici, richiedono altre tipologie di
rappresentazione, come grafi o tabelle di transizione
Es. Logica di funzionamento di un distributore di energy
drink: il distributore accetta monete da 1 e 0,5 euro, la
bibita costa 2,50 euro ed il resto erogabile è 0,5 euro.
pag. 120
Fondamenti di Automatica – 1.2 Sistemi
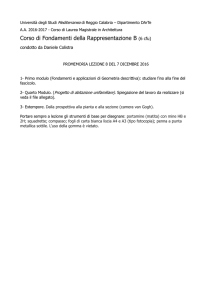
Modellazione di sistemi discreti a stati finiti - 1
Es. Logica di funzionamento di un distributore di
energy drink: ingressi e uscite:
U = {0,5; 1}, Y = {1; 2; 3}
(1: richiede altre monete, 2: eroga bibita, 3: eroga bibita e resto)
X = vedi grafo delle transizioni
1/1
0,5 / 1
X2
X3
0,5 / 1
X1
0,5 / 1
1/1
1/3
0,5 / 2
1/2
1/1
0,5 / 1
X5
pag. 121
X4
Fondamenti di Automatica – 1.2 Sistemi
Modellazione di sistemi discreti a stati finiti - 2
Es. Logica di funzionamento di un distributore di
energy drink: tabelle di transizioni ed uscite
STATO U = 0,5
U=1
STATO U = 0,5
U=1
X1
X2
X3
X1
1
1
X2
X3
X4
X2
1
1
X3
X4
X5
X3
1
1
X4
X5
X1
X4
1
2
X5
X1
X1
X5
2
3
x(k+1) = f(x(k),u(k))
pag. 122
y(k) = g(x(k),u(k))
Fondamenti di Automatica – 1.2 Sistemi
ELEMENTI DI TEORIA DEI SISTEMI
- Definizioni
- Modelli di sistemi ingegneristici
FINE
pag. 123
Fondamenti di Automatica – 1.2 Sistemi