INFORMATICA: APPUNTI
NB: Nei seguenti appunti sono spiegati in modo sintetico alcuni argomenti utili al secondo anno del
Liceo Scientifico Scienze Applicate, senza la pretesa di essere esaustivi, ma con l’unico scopo di
presentare quei concetti che saranno necessari ad introdurre alla teoria della programmazione
applicata alla sperimentazione scientifica. Pertanto gli argomenti trattati non sono completi (mancano
ad es. volutamente l’algebra degli schemi a blocchi ed i principi di funzionamento dei trasduttori).
SISTEMI
Un sistema è un insieme, isolato artificialmente dal contesto, costituito da più parti tra loro interagenti
di cui si vuole indagare il comportamento.
Esempi di sistemi fisici elementari:
• meccanici: corpo rigido, molla
• elettrici: amplificatore, trasformatore
• termici: fluido da riscaldare, generatore di calore
Sistema Deterministico e Sistema Stocastico.
Un sistema è Deterministico quando è possibile determinare la sequenza delle uscite, conoscendo la
sequenza degli ingressi e lo stato di partenza del sistema stesso. Un sistema è Stocastico (o
Probabilistico) quando questa previsione è impossibile (ad es ecosistema o lotteria).
Sistemi tempo invarianti / tempo varianti
Le loro caratteristiche sono costanti nel tempo (componente elettrico) o variano velocemente
(pneumatici auto da corsa)
Sistemi monovariabili / multivariabili (SISO – MIMO)
A seconda che ci siano un ingresso-una uscita (resistenza elettrica) ovvero più ingressi-più uscite
(serra automatizzata)
Sistemi lineari / non lineari
A seconda che il rapporto fra uscita e ingresso sia costante (potenziometro > intensiità della luce). o
meno. Alcuni sistemi (molla) sono lineari soltanto in un intervallo, che viene scelto per le applicazioni,
oppure approssimano un sistema lineare.
Sistema Combinatorio (senza memoria).
Un sistema si dice combinatorio quando la risposta del sistema dipende esclusivamente dalla
sollecitazione in quel momento, e non dalla storia passata del sistema stesso. Esempi: cellule
fotoelettriche, operatori logici.
Sistema Sequenziale (con memoria).
Un sistema si dice sequenziale quando la risposta del sistema dipende non solo dalla sollecitazione in
quel momento, ma anche da tutte le sollecitazioni precedenti (condizioni iniziali, per i sistemi continui,
stato iniziale per i sistemi discreti). Esempi: batteria ricaricabile, contatore digitale.
R. GUMA – APPUNTI DI INFORMATICA destinati a scopo di studio – tutti i diritti riservati
MODELLI
Un modello di un sistema è una descrizione delle sue caratteristiche più importanti e della legge che
regola la variazione nel tempo e/o nello spazio delle grandezze che lo caratterizzano.
Il modello serve:
• per trasmettere informazioni
• per definire e risolvere problemi
Ad uno stesso sistema è possibile associare più di un modello. Un sistema viene descritto con un
certo livello di dettaglio, includendo nella rappresentazione solo quelle componenti e interazioni fra
componenti che si ritengono necessarie allo scopo prefisso.
In un modello analitico il sistema è rappresentato tramite variabili e parametri, e con le relazioni fra
essi. La valutazione del sistema effettuata utilizzando il modello analitico richiede il calcolo della sua
soluzione tramite metodi analitici o soluzioni numeriche:
•
Modello funzionale: mostra il funzionamento del sistema: flow chart (diagramma di flusso),
diagramma degli stati, schema elettrico o a blocchi.
•
Modello matematico: è una descrizione della struttura e dell'evoluzione del sistema mediante
simboli matematici
•
Modello tabellare, grafico, etc
Un modello di simulazione riproduce il comportamento dinamico del sistema nel tempo
rappresentando componenti e interazioni in termini di relazioni funzionali. La valutazione di un sistema
tramite un modello di simulazione richiede l’esecuzione di un programma di simulazione, o simulatore.
Le grandezze caratteristiche di un sistema sono classificate come:
• parametri, che descrivono la struttura fisica e sono solitamente costanti: valore di una resistenza,
massa di una trave, caratteristiche geometriche di un robot, ...
• variabili, che descrivono il variare di una grandezza del sistema: corrente elettrica, posizione o
velocità di un corpo nello spazio, temperatura di un forno, livello di un liquido in un contenitore, ...
I parametri e le variabili di un modello matematico (sistema) sono espressi da numeri con o senza
dimensioni. Le loro interdipendenze sono definite da relazioni matematiche. La classificazione delle
grandezze utilizzate dal sistema dipende dal contesto in cui il sistema viene analizzato (ad esempio
l'accelerazione di gravità terrestre è un parametro costante al livello del mare, mentre diventa una
variabile durante un lancio in orbita).
Stato.
Lo Stato di un sistema sequenziale è quel dato che contiene la storia passata del sistema discreto,
influenzando le risposte future. Un Diagramma degli Stati è un metodo grafico per la rappresentazione
del comportamento di un sistema sequenziale discreto, secondo i vari possibili ingressi; ciascuno degli
stati viene indicato da un cerchietto (nodo), in cui s’indica il nome dello stato ed il valore
corrispondente dell’uscita; da ogni nodo partono tanti archi orientati (transizioni) quanti sono i possibili
valori degli ingressi, diretti verso altri nodi o ritorti sul nodo stesso.
R. GUMA – APPUNTI DI INFORMATICA destinati a scopo di studio – tutti i diritti riservati
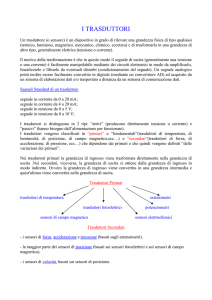
TRASDUTTORI
In un sistema di acquisizione dati o in un sistema di controllo le grandezze da analizzare o controllare
sono rilevate da trasduttori. I trasduttori si distinguono in sensori e attuatori. I sensori rilevano e
trasformano una grandezza fisica d'ingresso (spostamento, temperatura, velocità, ecc.) in una grandezza (in genere) elettrica legata alla prima da una ben determinata relazione, mentre gli attuatori
permettono di trasformare una grandezza elettrica in una grandezza fisica ad essa proporzionale.
La classificazione dei trasduttori può seguire criteri diversi, ad es. in base alla grandezza d’ingresso
ovvero in base al principio di funzionamento.
Le principali grandezze fisiche che possono essere trasdotte sono:
•
•
•
•
•
•
•
•
posizione, spostamento, livello
velocità
accelerazione
temperatura
pressione, forza, tensione (meccanica)
luce
umidità
gas, inquinanti, polveri, etc
In base al principio di funzionamento, i trasduttori possono dividersi in
resistivi, capacitivi, induttivi, magnetici, ottici, meccanici, pneumatici, chimici.
I trasduttori possono essere analogici o digitali. Quelli digitali hanno in genere dimensioni contenute e
sono facilmente interfacciabili con altri dispositivi digitali, mentre le uscite di quelli analogici
necessitano di alcune operazioni per poter essere monitorate o manipolate da sistemi informatizzati.
Tali operazioni sono il campionamento, l’approssimazione (una volta stabilita la precisione desiderata)
e la conversione da analogico in digitale con appositi dispositivi elettronici detti convertitori A/D o
anche – sempre se i valori prescelti lo permettono - usando dispositivi ad ingresso analogico ed uscita
digitale mediante programmi di codifica predisposti dal progettista (come in ambiente Arduino).
Ovviamente nel caso degli attuatori analogici vanno eseguite in modo speculare le operazioni inverse.
I principali parametri caratteristici dei trasduttori in base ai quali avviene la scelta per una data
applicazione sono:
•campo (o range) di lavoro: è l'intervallo di valori della grandezza d'ingresso entro cui sono garantite
le prestazioni del trasduttore;
•segnale d'uscita: influisce molto le scelte progettuali. Può essere una tensione, una corrente, una
frequenza; di tipo analogico o digitale;
•caratteristica di trasferimento: è la relazione tra la grandezza elettrica d'uscita e la grandezza fisica
d'ingresso; può essere espressa in forma analitica o in forma grafica o mediante una tabella di valori;
•linearità: proporzionalità tra la grandezza d'uscita e d'ingresso. Non esistono trasduttori
completamente lineari, per cui la caratteristica di trasferimento approssima una retta..
R. GUMA – APPUNTI DI INFORMATICA destinati a scopo di studio – tutti i diritti riservati
•errore di non linearità indica lo scostamento massimo della caratteristica di trasferimento da una
specifica retta interpolante
•sensibilità: è il rapporto fra la variazione della grandezza d'uscita e la variazione della grandezza
d'ingresso che l'ha prodotta.
•risoluzione: è la minima variazione dell'ingresso in grado di variare l'uscita in modo percettibile;
•ripetibilità: è la capacità di fornire le stesse prestazioni in misurazioni successive, eseguite nelle
stesse condizioni operative;
•rumore: è il segnale indesiderato prodotto in uscita dal trasduttore in assenza d'ingresso
•errore dinamico: esprime la differenza tra l'uscita effettiva e quella teorica in presenza di ingressi
variabili nel tempo;
•velocità di risposta: è il tempo impiegato dal trasduttore ad adeguare il segnale d'uscita ad una
variazione della grandezza d'ingresso.
Altri parametri da considerare nella scelta di un trasduttore sono costo, ingombro, peso, caratteristiche
meccaniche, tensione di alimentazione, compatibilità con l’ambiente di lavoro (ad es. presenza di
polveri, temperature di lavoro estreme…), isolamento elettrico o magnetico, etc,.
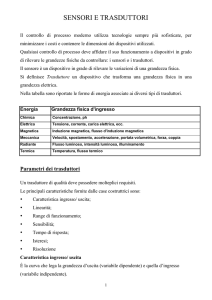
Una volta scelto il sensore e l’attuatore più adeguati, si può realizzare un sistema che permette di
controllare la grandezza fisica in ingresso e può essere schematizzato con uno schema a blocchi:
Un collegamento di questo tipo viene detto collegamento in retroazione negativa.
Il blocco H è un trasduttore che misura l’uscita e la trasforma in un segnale di tensione che, grazie al
nodo, viene confrontato con la tensione di riferimento I che corrisponde al valore desiderato. E sarà
l’errore, ed è proprio la grandezza che, quale input di G, consente la correzione.
Un classico esempio è quello del pilota automatico, dove I è il valore proporzionale alla velocità da
controllare, UH la velocità effettiva, E la differenza fra le due. Se I > UH il sistema accelera, se I < UH
il sistema decelera. Altro esempio quello di un sistema di riscaldamento ambientale, ma mentre nel
caso precedente l’attuatore (acceleratore o deceleratore) gestiva l’uscita in modo proporzionale, in
genere per regolare la temperatura la caldaia viene accesa e spenta mediante un’elettrovalvola e si
parla di sistema on-off.
R. GUMA – APPUNTI DI INFORMATICA destinati a scopo di studio – tutti i diritti riservati