L. Taponecco - Appunti di Meccatronica
Cap. XI – Azionamenti elettrici con controllo digitale.
XI-1. Introduzione.
A partire dagli anni ottanta, grazie allo sviluppo dei microprocessori (µP) e dei
componenti necessari per il loro funzionamento (memorie, convertitori di tipo
analogico-digitale e digitale-analogico, ecc.), la tecnologia digitale ha gradualmente
sostituito negli azionamenti elettrici quella analogica permettendo la realizzazione di
funzioni di controllo molto sofisticate, impossibili da realizzare altrimenti, con
conseguente incremento delle prestazioni degli azionamenti elettrici.
Si é così passati a filosofie di comando in cui un elemento intelligente quale il µP,
opportunamente programmato e interfacciato con tutti gli altri blocchi funzionali,
oltre a svolgere il compito primario del controllo del moto, acquisisce ed elabora i
segnali in ingresso, genera le temporizzazioni ed effettua tutta una serie di funzioni
ausiliarie (identificazione dei parametri di macchina, protezioni, diagnostica,
coordinamento di tutte le funzioni del sistema, ecc.), che costituiscono uno degli
aspetti più interessanti della transizione dal controllo analogico a quello digitale.
I principali vantaggi connessi all'uso del controllo digitale sono:
- grande flessibilità (è possibile realizzare strutture hardware quasi universali e
adattare, in funzione della specifica applicazione, il sistema di controllo più
opportuno agendo a livello di software, cioè semplicemente cambiando il programma
esecutivo);
- notevoli potenzialità di calcolo (si possono facilmente eseguire operazioni
matematiche anche complesse e quindi non costituisce più un problema
implementare funzioni di controllo non lineari e controllori adattativi, stimare i
parametri di macchina e le variabili di stato non misurabili, ecc.);
- assenza di problemi di memorizzazione dati;
- riduzione di costi, pesi, ingombri ed aumento dell'affidabilità, grazie alla
semplificazione dell'hardware ed alla grande affidabilità intrinseca dei processori;
- estrema stabilità nel tempo delle prestazioni ottenibili (il guadagno e la larghezza di
banda del filtro, generato dal µP, rimangono invariati nel tempo ed al variare della
temperatura, ciò evita l'introduzione di elementi compensatori);
- maggiore insensibilità ai disturbi elettromagnetici, grazie all'elevato grado di
integrazione ottenibile;
- capacità di diagnostica e intrinseca facilità di comunicazione con il supervisore
centrale.
Però negli azionamenti con controllo digitale sono presenti sia variabili a tempo
continuo sia variabili a tempo discreto, in quanto i sistemi da controllare sono
analogici mentre il µP é in grado di elaborare numeri. E' necessario pertanto che i
segnali analogici tempo-continuo in ingresso al µP siano campionati ad istanti
discreti di tempo kT da un campionatore (con T periodo di campionamento) e quindi
convertiti, mediante un convertitore analogico/digitale (ADC) in una sequenza di
333
L. Taponecco - Appunti di Meccatronica
valori numerici espressi in forma digitale, cioè in segnali quantizzati, oltre che in
tempo, anche in ampiezza, rappresentati da numeri binari con lunghezza di parola e
risoluzione definite (fig. XI-1).
Fig. XI-1
Ad ogni istante di campionamento il µP legge tali segnali digitali (cioè il valore
discretizzato del segnale errore) e genera un segnale di controllo sotto forma di
numeri binari, che viene riconvertito, mediante un circuito di mantenimento ed un
convertitore digitale-analogico (DAC) (fig. XI-2), in un segnale analogico tempocontinuo (costituito in genere da una sequenza di livelli costanti aggiornati ogni T
secondi) adatti al pilotaggio del sistema da controllare. Il segnale di clock che
determina le cadenze delle operazioni di ingresso e uscita è generato dal µP.
Fig. XI-2
Il controllo digitale, per consentire al µP di colloquiare con il sistema controllato,
comporta quindi, oltre alla necessità di inserire un campionatore, un circuito di
mantenimento, un convertitore A/D ed un convertitore D/A, errori di quantizzazione
(fig. XI-3) nella conversione analogico-digitale (la cui entità dipende dal numero di
bit della parola digitale, che costituisce un parametro fondamentale che influenza le
prestazioni del sistema).
Inoltre poichè nei sistemi di controllo tempo-discreto le variabili che entrano ed
escono dal µP cambiano solamente ad istanti discreti di tempo kT, che corrispondono
agli istanti in cui viene effettuata la misura o in cui viene letta la memoria del µP,
334
L. Taponecco - Appunti di Meccatronica
nell'effettuare l'analisi e la sintesi di questi sistemi occorre tenere conto che l'azione
di campionamento può portare alla perdita di qualche informazione.
Fig. XI-3
Spesso per il controllo del moto si utilizza una tecnologia mista: analogica per
l'anello più interno di corrente e digitale per gli anelli sovrapposti.
In figura XI-4 è riportato uno schema a blocchi funzionale di un azionamento in
corrente alternata per il controllo della velocità di tipo analogico-digitale.
Fig. XI-4
335
L. Taponecco - Appunti di Meccatronica
XI-10/2. Componenti e relativi modelli matematici.
Prendiamo in esame un controllo digitale di posizione realizzato con un azionamento
in corrente continua, che per ragioni di semplicità presenta (fig. XI-5) il solo anello
di posizione (la trattazione svolta è poi facilmente estendibile a qualsiasi tipo di
motore e al caso di più anelli), ed analizziamo i vari componenti del sistema,
determinando per ognuno di essi la relativa funzione di trasferimento.
Fig. XI-5
1- Blocco costituito da motore in corrente continua, organi di trasmissione del
moto e macchina azionata.
Ricordiamo che:
-la macchina azionata é caratterizzata dai valori della coppia resistente Cc [Nm] e
dell'inerzia Jc [Kg m2];
-gli organi di trasmissione del moto possono essere costituiti da organi di riduzione
del moto (quali ad esempio cinghia e puleggia o coppie di ingranaggi) che
consentono di ottenere elevate coppie a basso numero di giri e sono caratterizzati dal
rapporto di riduzione r tra la velocità del motore e quella del carico [il cui valore
teorico ottimale per minimizzare lo stress termico del motore è r=√(Jr/Jm)], oppure da
organi di conversione del moto da rotante a lineare, oppure da collegamenti diretti
(per evitare di introdurre giochi che portano ad errori di posizione o oscillazioni);
-il motore in corrente continua é caratterizzato dalla costante di coppia Kt [Nm/A],
dalla resistenza di armatura Ra [Ω], dall'inerzia Jm [Kg m2] e dai valori continuo
Cm/n=Cc [Nm] (che deve sviluppare per superare la coppia costante di attrito o
gravitazionale e azionare il carico senza sovrariscaldamenti) e di picco
Cm/p=(Jm+Jc/r2)a+Cc [Nm] della coppia (che deve sviluppare nei periodi di
accelerazione senza subire danni meccanici o smagnetizzazioni permanenti).
336
L. Taponecco - Appunti di Meccatronica
Ciò premesso il modello semplificato dell’insieme di motore in corrente continua,
organi di trasmissione del moto e macchina azionata, espresso in valori assoluti e
sotto le ipotesi semplificative normalmente assunte, nel caso di Ω≤ Ωn è
costituito dal seguente sistema lineare di equazioni:
Vciα = Rt Ia + Lt dIa/dt + Ke Ω
J dΩ/dt = Kt Ia − Cr
dΘ/dt = Ω
con: Ω = Ωm
Cr = Cc/r
J=Jm+Jc/r2 .
Pertanto utilizzando la trasformata di Laplace e avendo posto:
Ke=Kt=K τt=Lt/Rt e τem= JRt/K2,
sistema lineare di equazioni diventa:
Vciα(s) = Rt (1+sτt)Ia(s) + K Ω(s)
sJ Ω(s) = K Ia(s) − Cr(s)
sΘ(s) = Ω(s)
e quindi nel caso più comune in cui il convertitore statico che alimenta il motore in
corrente continua imponga la tensione (fig. XI-6) la funzione di trasferimento è:
Θ(s)/Vciαα(s) = (1/s) [K/(Rt+sLt)Js] / [1+K2/(Rt+sLt)Js] =
= K / s [s2JLt+sJRt+K2] = (1/K) / s (s2τemτt+sτem+1) ≅
≅ (1/K) / [s (1+sττt) (1+sττem)] .
Nel caso invece in cui il convertitore imponga la corrente è:
Θ(s)/Ia(s) = K/Js2.
Fig. XI-6
337
L. Taponecco - Appunti di Meccatronica
2- Organo di comando.
Trascurando in prima approssimazione il ritardo medio Tcm , la f.d.t. è:
Vciαα(s)/Vcm(s) = Kcm ;
3- Sensore di posizione (encoder con relativo decodificatore di posizione).
Trascurando gli effetti di non linearità derivanti dal suo funzionamento discretizzato,
può essere modellato come un guadagno puro, pari al rapporto tra il segnale di
retroazione Θ(kT) (fornito agli istanti discreti di tempo kT ed espresso in counts o
unità di risoluzione corrispondenti al minimo angolo rilevabile) e la corrispondente
posizione angolare effettiva θ(t) (espressa in radianti):
Θ(kT)/Θ
Θ(s) = Kp = 4N/2π
π [counts/rad]
n
Θ(kT)/Θ
Θ(s) = Kp = 2 /2π
π [counts/rad]
(encoder increm. con 2 canali e N tacche)
(encoder assoluto con n bit in parallelo)
Per quanto riguarda la risoluzione del sensore, un suo aumento migliora il sistema in
quanto riduce l'effetto di quantizzazione di posizione e consente il funzionamento
alle basse velocità, ma comporta la necessità di impiegare componenti più veloci in
caso di impiego anche ad elevate velocità.
Esempio. Scegliamo la risoluzione del sensore di posizione di un azionamento il cui motore ha una velocità massima di
6000 g/min, deve fermarsi con una precisione di 0.4° e il cui controllore consente all'encoder frequenze massime di
500.000 counts/s. La massima risoluzione é Rmax= fmax/ωmax = 5.000 counts/g. D'altra parte la risoluzione del sensore
deve essere più piccola (da 2 a 4 volte) dell'errore di posizione permesso, per cui si ottiene: Rmin = 360°/ (0.4°/2) =
1.800 counts/g. La risoluzione dell'encoder deve quindi assumere un valore compreso tra 1.800 e 5.000 counts/g; una
buona scelta é 4.000 counts/g, che corrisponde ad un encoder incrementale con 1.000 fori uniformemente distribuiti
sulla periferia del disco.
In alcune applicazioni é necessario aggiungere un anello di regolazione della velocità analogico in cui il segnale di
retroazione, generato da un tachimetro o derivato dal segnale dell'encoder, aiuta a stabilizzare il sistema alle basse
velocità. Poichè l'impiego del tachimetro richiede un elemento addizionale con aumento del costo e delle dimensioni, é
altamente desiderabile usare un circuito integrato decodificatore della velocità, che deriva il segnale di velocità dalla
forma d'onda dell'encoder tramite processo di derivazione.
4- Controllore digitale.
Il controllore digitale, che è il cervello del controllo del moto e le cui funzioni
vengono espletate dal µP, nel caso di controllo di posizione, effettua, ad intervalli di
tempo regolari di durata pari a T , le seguenti operazioni:
a) genera, in relazione al desiderato profilo di velocità (che dipende dai valori
massimi ammissibili di velocità, di accelerazione e di jerk), la traiettoria di
riferimento dell'albero del motore Θr(kT) per passare dalla posizione iniziale a quella
finale in un assegnato tempo tc ;
b) decodifica la posizione reale Θ(kT), fornita dal sensore di posizione;
c) determina il segnale errore di posizione X(kT) = Θr(kT)−Θ(kT);
d) filtra digitalmente X(kT) in modo tale da far seguire al motore una traiettoria più
vicina possibile a quella desiderata, mantenendo cioè minimo in ogni istante X(kT);
e) applica il segnale errore filtrato Y(kT) all'ingresso di un convertitore D/A, la cui
uscita è applicata ad un dispositivo di mantenimento, che effettua l'interpolazione
338
L. Taponecco - Appunti di Meccatronica
temporale tra i valori analogici tempo-discreti in ingresso generando così un segnale
tempo-continuo (spesso la fase di mantenimento precede quella di conversione).
I filtri digitali sono algoritmi di calcolo che convertono una sequenza di numeri in
ingresso in una sequenza di numeri in uscita in modo da assicurare al sistema
controllato, oltre alla stabilità, la dinamica e la precisione richieste; processano cioè
il segnale digitale di ingresso facendo passare le componenti di frequenza
desiderabili e rigettando quelle indesiderabili. Tali algoritmi sono rappresentati da
equazioni alle differenze, in cui il segnale di uscita Y(kT) all'istante di
campionamento kT dipende da una combinazione lineare del segnale di ingresso
X(kT) allo stesso istante e di un numero finito di campioni precedenti di X e di Y:
Y(kT) = bnX(kT) + bn-1X[(k−1)T] +..+ b0X[(k−n)T] − an-1Y[(k−1)T] −..− a0Y[(k−n)T]
dove i coefficienti bn bn-1...b0 e an-1...a0 caratterizzano il comportamento del sistema.
La f.d.t. del controllore digitale, che tiene conto della determinazione del segnale
errore di posizione X(kT) e del relativo filtraggio, si ottiene effettuando la
trasformata in z dell'algoritmo di controllo e deducendo quindi D(z) = Y(z)/X(z).
La trasformata in z è uno strumento matematico utile per l'analisi e la sintesi dei
sistemi di controllo digitali tempo-discreti, la cui dinamica é caratterizzata da una
equazione alle differenze. In analogia alla trasformata di Laplace, che nei sistemi
analogici tempo-continui trasforma equazioni integro-differenziali lineari tempoinvarianti in equazioni algebriche in s , la trasformata in z trasforma equazioni alle
differenze lineari tempo-invarianti in equazioni algebriche in z (fig. XI-7).
Fig. XI-7
Esempio. L'algoritmo del filtro digitale sia: Y(kT) = 3X(kT) − 2X[(k−1)T] , che sinteticamente, dato che si ripete ad
istanti multipli di T, possiamo scrivere : Y(k) = 3X(k) − 2X(k−1) ; se si applica la trasformata in z [a questo proposito
ricordiamo che se F(z) é la trasformata in z di f(k), la trasformata in z della funzione f(k−m) è z-mF(z)] si ottiene: Y(z)
= 3X(z) − 2X(z)/z , da cui si deduce: D(z) = Y(z)/X(z) = (3z −2) / z.
339
L. Taponecco - Appunti di Meccatronica
5- Convertitore digitale-analogico (DAC) e dispositivo di mantenimento (ZOH).
Per convertire l'informazione contenuta nei numeri binari in uscita dal filtro digitale,
cioè la sequenza numerica dei campioni Y(kT) forniti dal µP ad intervalli discreti di
tempo T, in un segnale analogico continuo é necessario un convertitore digitaleanalogico e un dispositivo di mantenimento che operi un qualche tipo di raccordo.
La f.d.t. del convertitore digitale-analogico DAC é data dal rapporto tra il massimo
campo di variazione della sua tensione analogica di uscita e il numero binario in
ingresso fornito dal µP:
Vcm(s)/Vcm(z) = Kd = 2Vcm/max / 2n [V/counts] ,
dove n è il numero di bit del numero binario in uscita dal µP e Vcm/max è il valore
assoluto massimo della tensione in uscita dal DAC.
Se il segnale di uscita tra due istanti successivi di campionamento è mantenuto, come
comunemente avviene in virtù della sua semplicità, ad un valore costante
corrispondente a quello dell'ultimo campionamento il dispositivo di mantenimento
viene indicato come Zero-Order-Hold (ZOH) o Sample-and-Hold e ad esso si
assegna per comodità, anche se in modo improprio, la f.d.t.:
ZOH(s) = [1−
−(e–sT)]/s .
Tale espressione deriva dal fatto che l'uscita dello ZOH, avendo un andamento a
gradini (fig. XI-8a), può essere scomposta (fig. XI-8b) in una serie di rettangoli
ognuno dei quali é dato dalla combinazione di due funzioni a gradino: una positiva a
partire dall'istante kT e una negativa a partire dall'istante (k+1)T.
Fig. XI-8a
Fig. XI-8b
Esistono anche dispositivi di mantenimento più sofisticati dello ZOH in cui il
segnale di uscita tra due istanti successivi di campionamento é approssimato da un
polinomio di grado n (higher order hold); questi però, pur consentendo una
ricostruzione del segnale più accurata, non vengono normalmente utilizzati in quanto
comportano maggiore complicazione.
340
L. Taponecco - Appunti di Meccatronica
XI-10/3. Analisi dei sistemi di controllo digitali.
Scopo dell'analisi é valutare: la stabilità (il sistema é stabile se il margine di fase ϕm
é positivo), lo smorzamento (per 30°≤ ϕm ≤45° la risposta é ben smorzata) e la
rapidità di risposta del sistema (la costante di tempo della risposta é
approssimativamente pari all'inverso della frequenza di crossover).
In base alla modellizzazione effettuata gli elementi di un sistema di controllo digitale
(fig. XI-9a) possono essere divisi in tre tipi fondamentali (fig. XI-9b):
-controllore digitale con f.d.t. D(z),
-circuito di mantenimento con f.d.t. ZOH(s) = [1−
−(e–sT)]/s ,
-tutti gli altri elementi modellati con f.d.t. continue e rappresentabili globalmente con
la seguente f.d.t.:
H(s) = KdKpM(s) = KdKp(Kcm/K)/[s(1+sττem) (1+sττt)].
Fig. XI-9a
Fig. XI-9b
Per effettuare l'analisi di un sistema di controllo digitale é necessario quindi
sviluppare preliminarmente modelli dello stesso tipo per tutti gli elementi che lo
compongono; ciò può essere fatto seguendo due differenti procedure: -analisi
digitale; -analisi con il metodo dell'approssimazione nel continuo.
341
L. Taponecco - Appunti di Meccatronica
XI-10/3a. Analisi digitale.
Per effettuare tale analisi è necessario, utilizzando la trasformata in z , sviluppare un
modello digitale per lo ZOH e per la f.d.t. complessiva H(s) di tutti gli elementi
tempo-continui presenti.
In tabella XI-1 sono riportate le trasformate in s e in z per alcune più comuni
funzioni temporali.
Essendo z = e sT , la z-trasformata invariante all'impulso del prodotto ZOH(s) H(s) è:
E(z) = Z [ZOH(s) H(s)] = Z [(1−e–sT)H(s)/s] = (1−
−z–1) Z [H(s)/s]
Il sistema risulta quindi costituito da due blocchi in cascata: D(z) e E(z), connessi in
controreazione unitaria (fig. XI-10), pertanto la f.d.t. complessiva è :
Θ(z)/Θr(z) = D(z)E(z)/[1+D(z)E(z)] .
Fig. XI-10
F(s)
trasformata in s
1
e−kTs
1/s
1/s2
2/s3
1/(s+a)
1/(s+a)2
a/s(s+a)
a/s2(s+a)
ω/(s2+ω2)
s/(s2+ω2)
f(t)
funzione temporale
δ(t)
δ(t−kT)
us(t)
t
t2
e−at
te−at
T−e−at
t−(1−e−at)/a
sen ωt
cos ωt
F(z)
trasformata in z
1
z−k
z /(z−1)
Tz/(z−1)2
T2z (z+1)/(z−1)3
z /(z−e−aT)
Tze−aT/(z−e−aT)2
z(1−e−aT)/(z−1)(z−e−aT)
z(Az−aTe−aT+1−e−aT)/a2(z−1)2(z−e−aT)
z sen ωT/(z2−2z cos ωT+1)
z (z−cos ωT) (z2−2z cos ωT+1)
con A = aT − 1 + e−aT
Tab. XI-1
342
L. Taponecco - Appunti di Meccatronica
Perché il sistema sia stabile tutte le radici dell'equazione caratteristica 1+D(z)E(z)=0
(cioè i poli del sistema ad anello chiuso) devono essere in modulo minori di 1. Ciò
deriva dalla corrispondenza tra piano s (dominio della trasformata di Laplace) e
piano z (dominio della trasformata in z) per ciò che concerne i domini di stabilità per
la posizione dei poli; infatti la condizione di stabilità, che per i sistemi tempocontinui é data da s<0 , per i sistemi tempo-discreti, essendo z = e sT , diventa
z<1 (fig. XI-11).
Fig. XI-11
Da notare che il comportamento dinamico di un sistema di controllo tempo-discreto
dipende dal periodo di campionamento T; una variazione di T modifica infatti la
posizione dei poli nel piano z e determina quindi un cambiamento nella risposta del
sistema. Un periodo di campionamento T troppo grande può rendere instabile il
sistema, uno troppo piccolo comporta una eccessiva lunghezza della parola.
Esempio.
Analizziamo la stabilità di un sistema di controllo digitale con le seguenti caratteristiche:
- guadagno convertitore-motore in corrente continua Kcm/K = 10 (rad/s)/V,
- costanti di tempo τem = 0.1s, τt ≅ 0 ,
- DAC a 8 bit con 10V di uscita,
- encoder incrementale con N=500 cave e due canali,
- tempo campionamento del controllore T = 1 ms,
- algoritmo del filtro digitale Y(k) = 25X(k) −16X(k −1) + 0.5Y(k −1);
Si ha:
M(s) = (Kcm/K)/[s(1+sτt) (1+sτem)] = 10 / [s(1+ 0.1s)] [rad/V]
Kd = 2 Vcm/max / 28 = 20 / 256 = 0.078 [V/counts]
Kp = 4N / 2π = 4 500 / 2 π = 318 [counts/rad]
H(s) = Kd Kp M(s) = 248 / [s(1+0.1s)]
ZOH(s) = (1−e-sT) / s = (1−e-0,001s) /s
D(z) = (25z−16) / (z−0.5)
E(z) = Z [ZOH(s)H(s)] = (1−z-1)248Z [10/s2 (s+10)] =
= (1−z-1)248{z(4,98z+4,97)10-5/10(z−1) 2 (z−0.99)} ≅ 1,24⋅10-3 (z+1)/(z−1)(z−0.99).
L'equazione caratteristica è quindi: 1+[(25z−16)/(z−0,5)] [1,24 ⋅10-3 (z+1)/(z−1)(z−0,99)] = 0
e la stabilità del sistema dipende dalle radici di tale equazione ottenibili mediante procedimento numerico.
343
L. Taponecco - Appunti di Meccatronica
XI-10/3b. Analisi con il metodo dell'approssimazione nel continuo.
Si sviluppa preliminarmente, mediante la antitrasformata in z, un modello continuo
per il filtro digitale e quindi si utilizza la metodologia di analisi dei controlli
analogici.
Il modello nel continuo del filtro digitale D(z) con periodo di campionamento T si
ottiene nel seguente modo:
G(s) = D(z)
z=e sT ;
poiché però tale f.d.t., a causa dei termini esponenziali, é difficile da trattare, si
ricorre normalmente a trasformazioni approssimate più semplici (fig. XI-12); tra le
quali la più diffusa é la trasformazione bilineare:
G(s) = D(z)
z=(1+sT/2)/(1-sT/2)
Per la trasformazione inversa basta sostituire in G(s ) s con (2/T) [(z−1)/(z+1)].
Fig. XI-12
344
L. Taponecco - Appunti di Meccatronica
La figura XI-11 riporta sette differenti forme di filtro tempo-discreto equivalente per
lo stesso filtro tempo-continuo G(s)=a/(s+a). Il grado di distorsione nella risposta
transitoria e nelle caratteristiche della risposta in frequenza dipendono dalla
frequenza di campionamento, dalla frequenza di taglio, ecc., pertanto é opportuno
che il progettista provi alcune forme alternative di filtro tempo-discreto equivalente e
solo dopo che una simulazione digitale ha dato buoni risultati effettui la scelta e il
progetto finale. Una proprietà comune ai vari metodi di discretizzazione é che la
fedeltà e la precisione del filtro discretizzato diminuiscono al diminuire della rapidità
di campionamento.
Il circuito di campionamento e tenuta, la cui f.d.t. approssimata è:
ZOH(s) = (1−e–sT)/s = 1/s−[1−sT/2+(sT)2/8−..]/s[1+sT/2+(sT)2/8+..] ≅
≅ 1/s−[(1−sT/2)/s(1+sT/2)] = T/(1+sT/2) ≅ Te–sT/2 ,
tenuto conto del campionatore a monte, si comporta come un puro ritardo di T/2:
ZOH(s)≈e–sT/2.
Si deriva la f.d.t. ad anello aperto tra ingresso e uscita A(s) [che nel caso di un solo
anello con retroazione unitaria é data dal prodotto di tutte le f.d.t. dell'anello
G(s)ZOH(s)H(s), mentre nei casi più complessi si determina la f.d.t. tra ingresso e
uscita e si riarrangiano i termini al denominatore in modo da ottenere la forma
1+A(s)] e si rimpiazza s con jω.
La procedura di analisi della stabilità si sviluppa quindi determinando la risposta
armonica A(jω), in base alla quale si ricava:
- la frequenza di crossover ωc, che (essendo quasi coincidente con la larghezza di
banda ad anello chiuso) fornisce un'indicazione sulla velocità di risposta;
- il margine di fase ϕm = 180°+ϕ = 180°+arg[A(jωc)], che ci dice se il sistema è
stabile (ϕm > 0) e se la risposta è ben smorzata (30°≤ ϕm ≤ 45°).
Esempio. Analizziamo la stabilità di un sistema di controllo digitale con le seguenti caratteristiche:
D(z) = 130(z−0.8)/(z−0.2),
T = 0.001s,
H(s) = 248/[s(1+0.1s)].
Poiché:
ZOH(s) = e−0.0005s,
A(s) = G(s)ZOH(s)H(s) = [4,84 105 e−0.0005s (s+222)]/[s(s+10)(s+1333)]
G(s) = D(z)z=[(2000+s) / (2000-s)] = 195 (s+222)/(s+1333)
la f.d.t. ad anello aperto risulta:
e
Pertanto:
dalla condizioneA(jωc) = [484 105 (jωc+222)]/[jωc(jωc+10)(jωc+1333)] = 1
si deduce
ωc ≅ 400 rad/s
ed essendo ϕ = arg [A(jωc)] = arctg(ωc/222) − 0,0005 ωc 360°/2π − 90° − arctg(ωc/10) − arctg(ωc/1333) =
= 61°−11,5°−90°−88,5°−17° = −146°
si deduce
ϕm = 180° + ϕ = 34°
Il sistema é quindi stabile e ben smorzato con costante di tempo ≅ 1/ωc = 2.5 ms.
345
L. Taponecco - Appunti di Meccatronica
XI-10/4. Progetto di un controllore digitale mediante controllore
analogico equivalente.
La sintesi dei controllori digitali tempo-discreti può essere effettuata in due differenti
modalità: considerare il controllore discreto come approssimazione di uno continuo
(metodo per approssimazione) o studiare tutto il sistema con le tecniche proprie dei
sistemi a segnali campionati (metodo diretto). Generalmente l'approccio più semplice
e pratico è il primo, che può essere impiegato quando la frequenza di campionamento
è sufficientemente alta rispetto a quelle in gioco. Tale tecnica di progettazione si
articola in tre fasi:
- nella prima fase si effettua un progetto convenzionale, secondo tecniche ben
consolidate, di un controllore analogico G(s) in grado di soddisfare le specifiche
richieste (fig. XI-13);
- nella seconda fase, scelta una idonea tecnica di discretizzazione ed un periodo di
campionamento T sufficientemente piccolo (tale da soddisfare al teorema di
campionamento, secondo cui, per conservare tutta l'informazione originaria, la
frequenza di campionamento deve essere superiore al doppio della frequenza
massima di tutte le componenti armoniche del segnale analogico), si discretizza il
controllore analogico progettato e si usa tale versione discretizzata come controllore
digitale D(z);
- nella terza fase si verifica la correttezza della risposta temporale del controllore
tempo-discreto così ottenuto (cioè se il sistema così progettato si comporta come
atteso), in quanto il processo di campionamento e quantizzazione può modificare
sensibilmente le caratteristiche della risposta transitoria del sistema; pertanto si testa
la risposta a vari segnali di ingresso del sistema e solo se le risposte in frequenza e
indiciali del sistema di controllo tempo-discreto sono in buon accordo con quelle del
sistema di controllo tempo-continuo di partenza possiamo considerare i due sistemi
equivalenti. A tale fine si converte il controllore digitale, che è specificato sotto
forma di un rapporto di polinomi in z, in un algoritmo numerico e lo si risolve in
tempo reale mediante calcolatore.
Fig. XI-13
346
L. Taponecco - Appunti di Meccatronica
Il teorema del campionamento. Dato un segnale continuo e(t), con quale criterio scegliamo la frequenza di
campionamento in modo che il segnale campionato contenga tutte le informazioni contenute in e(t)? Si intuisce che il
periodo di campionamento sarà in qualche modo legato alla rapidità di evoluzione del fenomeno rappresentato dal
segnale e(t). Una risposta al quesito è data dal teorema del campionamento che afferma che la minima frequenza
necessaria (frequenza di Nyquist) per campionare un segnale, con larghezza di banda finita e nota, senza perdere
informazioni deve essere pari al doppio della frequenza della componente armonica a frequenza più alta fc=2fmax. Nella
pratica si utilizza un valore della frequenza di campionamento superiore al valore fissato dal teorema, in quanto la banda
massima non è esattamente determinabile, quindi è preferibile mantenersi ad un valore solitamente quadruplo di quello
desiderato.
In pratica il teorema del campionamento pone un vincolo per la progettazione di apparati di conversione analogicodigitale: se si ha a disposizione un campionatore che lavora a frequenza fS, è necessario mandargli in ingresso un segnale
a banda limitata da fS/2. In generale un segnale analogico non è limitato in frequenza, ma dovrà essere filtrato per
eliminare le componenti di frequenza maggiore di fS/2.
La tecnica di progettare un controllore digitale mediante il controllore analogico
equivalente é molto diffusa in quanto, consentendo di sfruttare l'esperienza
accumulata nella progettazione dei controllori analogici classici, in pratica non
richiede alcuna conoscenza di controllo digitale.
Richiede però una certa familiarità con le tecniche di discretizzazione (utili anche per
simulare sistemi di controllo tempo continuo su calcolatore digitale), poiché le
caratteristiche dinamiche del controllore digitale equivalente così ottenuto
dipendono, oltre che dalla frequenza di campionamento scelta, dal metodo di
discretizzazione adottato (cioè dal modo con cui viene approssimata la risposta tra
gli istanti di campionamento).
Infatti, poichè l'operazione di campionamento modifica le caratteristiche della
risposta influenzando sfavorevolmente la stabilità del sistema in quanto nel
discretizzare un filtro tempo-continuo non è possibile preservarne tutte le proprietà
(numero di poli e di zeri, risposte indiciali, guadagno, frequenza di attraversamento,
margini di fase e di guadagno) essendo la risposta del sistema ottenuta solo agli
istanti di campionamento, il progettista deve accettare una forma di compromesso e
decidere caso per caso quali sono le caratteristiche dinamiche più importanti e
scegliere di conseguenza il metodo di discretizzazione più adatto.
In relazione al modo in cui si approssima la risposta tra i punti di campionamento, si
possono quindi ottenere molti differenti controllori digitali equivalenti ad un dato
controllore analogico.
Nelle figure XI-14a e XI-14b sono mostrate le forme d'onda ingresso-uscita di un
sistema continuo e di una sua versione discretizzata e in figura XI-14c viene
effettuato un confronto fra le uscite dei due sistemi.
347
L. Taponecco - Appunti di Meccatronica
Fig. XI-14a
Fig. XI-14b
Fig. XI-14c
348
L. Taponecco - Appunti di Meccatronica
Nel rimpiazzare il controllore analogico G(s) col controllore digitale equivalente
D(z), ottenuto discretizzando G(s), oltre ai convertitori A/D e D/A, si deve inserire a
monte un campionatore e a valle un dispositivo di mantenimento (fig. XI-15).
Fig. XI-15
Poiché il ritardo temporale introdotto dal dispositivo di mantenimento riduce il
margine di stabilità del sistema, bisogna già tenerne conto nella progettazione del
controllore analogico (fig. XI-16) affinché il controllore digitale (ottenuto per
discretizzazione) si comporti nel modo più simile possibile a quello continuo di
partenza. Pertanto lo ZOH, la cui f.d.t. in prima approssimazione è Te–sT/2 , tenuto
conto del fatto che il guadagno globale del sistema viene determinato nella fase
finale del progetto, può essere modellato nel continuo come un dispositivo di ritardo
del primo ordine con costante di tempo uguale alla metà del periodo di
campionamento: ZOHeq(s) ≅ e–sT/2
Fig. XI-16
Il controllore analogico G(s) così progettato viene quindi discretizzato e si ottiene il
controllore digitale equivalente D(z).
Per controllare che il sistema così progettato si comporti come atteso si determina
quindi la f.d.t. G(z) del sistema tempo-continuo Gp(s) e si testa la risposta a vari
segnali di ingresso del sistema (fig. XI-17).
Fig. XI-17
349
L. Taponecco - Appunti di Meccatronica
Ciò premesso, il progetto di un controllore digitale D(z), tale che il sistema risultante
abbia una certa frequenza di crossover ωc ed un certo margine di fase ϕm , può
svilupparsi nel seguente modo:
1a) in base alla frequenza di crossover desiderata e al periodo di campionamento T
assunto (≅ 0.5÷1 ms) si determinano:
- la fase di H(s)
ϕ1 = arg [H(jωc)]
- il ritardo di fase introdotto dallo ZOH ϕ2 = arg [ZOH(jωc)] = −(ωcT/2) (360°/2π);
1b) in base ai valori di ϕ1 e ϕ2 calcolati e al margine di fase ϕm desiderato, si
determina l'anticipo di fase del controllore analogico del sistema di controllo tempocontinuo modificato
ϕ3 = ϕm −180° − ϕ1 − ϕ2 ;
1c) si progetta un controllore analogico del tipo: G(s) = K(s+ω1)/(s+ω2) con ω1< ω2
[la funzione primaria di anticipo, producendo una fase positiva, aumenta il margine di
fase e migliora la stabilità, la funzione secondaria di ritardo, aumentando il guadagno
del filtro alle basse frequenze, determina una migliore precisione del sistema]; il
progetto consiste nel determinare i parametri K, ω1 e ω2 utilizzando ad esempio la
seguente metodologia: prima prevale lo zero poi il polo e la fase vale:
ϕ3 = arctg(ω/ω1) − arctg(ω/ω2); si ha pertanto
dϕ3/dω = {1/[1+(ω/ω1)2]}(1/ω1)−{1/[1+(ω/ω2)2]}(1/ω2) = 0 da cui si deduce:
ω1/(ωM2+ω12)=ω2/(ωM2+ω22) ⇒ ωM = √{[ω1ω2(ω2−ω1)]/(ω2−ω1)} = √(ω1ω2);
utilizzando il grafico ϕ3max=arctg(ωM/ω1)−arctg(ωM/ω2)=arctg√(ω2/ω1)−arctg√(ω1/ω2)
= f(ω2/ω1), in relazione al valore del desiderato anticipo di fase ϕ3 si determina il
rapporto ω2/ω1; quindi, poiché il massimo anticipo di fase del filtro si ha quando ω1 e
ω2 sono tali da verificare la condizione ωc=√(ω1ω2), si determinano i valori di ω1 e ω2
infine, imponendo che l'ampiezza della f.d.t. ad anello aperto A(s) sia uguale a 1 alla
frequenza di crossover: G(jωc)ZOH(jωc)H(jωc)=1 (il guadagno globale del sistema
verrà preso in esame nella fase finale del progetto) si determina il guadagno K].
2a) si discretizza il controllore analogico G(s) progettato utilizzando il metodo di
trasformazione più idoneo; ad es. il metodo di trasformazione bilineare:
D(z) = G(s)s = (2/T) [(z-1)/(z+1)] ;
2b) si determina la f.d.t. E(z) = Z[ZOH(s)H(s)] , quindi la f.d.t. ad anello chiuso
D(z)E(z)/[1+D(z)E(z)] ed infine le radici dell'equazione caratteristica 1+D(z)E(z) =
0, verificando che il loro modulo risulti inferiore a 1; più in generale, mediante alcuni
test, si verifica se il sistema così progettato si comporta come desiderato;
2c) se tale verifica ha dato esito positivo, si converte il controllore digitale D(z), che
é specificato nella forma di un rapporto di polinomiali in z, in un algoritmo numerico
(equazione alle differenze finite) che si presta ad essere elaborato ricorsivamente dal
controllore digitale, permettendo l'immediata stesura nel linguaggio del processore
impiegato e consentendo anche la simulazione numerica.
350
L. Taponecco - Appunti di Meccatronica
Concludendo tale metodo é semplice e piace ai progettisti perchè basandosi sulla
teoria dei controlli continui non richiede nessuna conoscenza di controllo digitale,
presenta però lo svantaggio di limitare la scelta di D(z) a quelle funzioni che
abbiano una corrispondente G(s) nel campo continuo e ciò non sempre é
possibile. Questa limitazione diventa importante nei sistemi di controllo con alta
larghezza di banda. Per superare questa limitazione si può fare ricorso ad un diverso
metodo di progettazione del filtro, noto come il metodo combinato poichè incorpora
metodi di progetto sia continui che digitali.
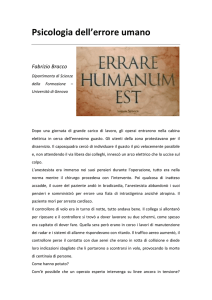
Esempio.
Progetto di un controllore digitale D(z), tale da ottenere una frequenza di crossover di 125 rad/s e un margine di fase di
45°, nel caso di un azionamento in corrente continua costituito da:
- motore cc con: Kt=0.0706[Nm/A], Ra =1.4[Ω], La =0[H], J=0.000706[kgm2] ⇒ τem=RaJ/Kt2=0.2[s] e τa≅0;
- raddrizzatore controllato con Kv = 5
⇒
M(s) = (Kv/Kt)/[s(1+sτa)(1+sτem)] = 70/[s(0.2s+1)];
- DAC a 8 bit e uscita di ±10V
⇒
Kd= 2Vm/2n =20/256=0.078 [V/counts],
- encoder incrementale con 500 cave ⇒ Kp=4⋅500/2π=318 [counts/rad] ⇒ H(s)=KdM(s)Kp=1740/[s(0.2s+1)]
- tempo campionamento del controllore T = 1 ms,
⇒ ZOH(s) = e−0.0005s
1) Si progetta un controllore continuo G(s) = K(s+ω1)/(s+ω2) tale da ottenere: ωc=125 rad/s e ϕm=45°.
Gli angoli di fase di H(s) e ZOH(s) sono:
ϕ1 = arg [H(jωc)] = arg [1740 / j125 (j 0,2⋅125 +1)] = − 90° − arctg 25 = −178°
ϕ2 = arg [ZOH(jωc)] = − ωc (360°/2π) T/2 = −125 (360°/2π)⋅0.0005 ≅ − 3°
Per ottenere ϕm = 45° l'anticipo di fase del controllore analogico deve essere: ϕ3= ϕm−180°−ϕ1−ϕ2 =46°, cui
corrisponde, in base al grafico di ϕ3max=arctg√(ω2/ω1)−arctg√(ω1/ω2), ω2/ω1=6.25 (fig. XI-18).
Fig. XI-18
Quindi poichè il massimo anticipo di fase del controllore analogico si ha quando ω1 e ω2 verificano la condizione
√(ω1ω2) = ωc = 125 rad/s si ricava:
ω1= 50 rad/s e ω2= 312 rad/s.
Per trovare il guadagno K si impone che il modulo della f.d.t. ad anello aperto A(s)=G(s)ZOH(s)H(s) sia uguale a 1 in
corrispondenza della frequenza di crossover: G(jωc)ZOH(jωc)H(jωc)= 1, cioè:
[K(j125+50)/(j125+312)] [1] [1740/j125(j25+1)] = 1
da cui si ricava:
K = 4.5.
Pertanto il filtro analogico è
G(s) = 4.5(s+50)/(s+312)
2) Si discretizza G(s) utilizzando la trasformazione bilineare: D(Z) = G(S)
s=(2/T) [(Z-1) / (Z+1)]
e si ottiene il filtro digitale equivalente
D(z) = 4 (z−
−0.95)/(z−
−0.73)
che viene poi convertito in un algoritmo numerico.
3) Per verificare la risposta del sistema di controllo progettato si determina:
E(z) = Z[ZOH(s)H(s)] = (1−z−1) Z[1740/[s2(0.2s+1)] = (1−z−1) 1740 Z[5/[s2(s+5)] =
= (1−z−1) 1740 [z(z(0,005−1+e−0,005)−0,005e−0,005+1−e−0,005)/25(z−1)2(z−e−0,005)]
e quindi in relazione alla f.d.t. ad anello chiuso D(z)E(z)/[1+D(z)E(z)], si determinano le radici dell'equazione
caratteristica 1+D(z)E(z) = 0, che forniscono informazioni sul comportamento del sistema campionato.
Se la verifica dà risultato positivo si converte il controllore digitale D(z), che é specificato nella forma di un rapporto di
polinomiali in z, in un algoritmo numerico (equazione alle differenze) che sarà risolto dal controllore digitale.
351