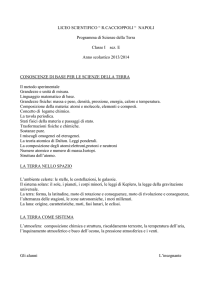
Moti relativi
Come descrivere posizione, velocità e accelerazione di un
punto materiale P in due sistemi di riferimento cartesiani
Oxy e O’x’y’. Supponiamo Oxy: fisso e O’x’y: mobile
P′ ≡ P
r′
OO'
r
r
r'
Distanza O O’
Vettore posizione di P rispetto a Oxy
Vettore posizione di P rispetto a O’x’y’
r
r
r = OO' + r '
Se i due sistemi traslano solo fra di loro, i versori non variano nel tempo.
r
r
r = OO' + r '
r
r
r d r d OO' d r '
v= =
+
=
dt
dt
dt
r
r
v OO' + v'
≡
P
′
r r
Leggi di trasformazione di velocità e
accelerazione per due sistemi che
traslano l’uno rispetto all’altro
d v d v OO ' d v'
a=
=
+
= a OO ' + a '
dt
dt
dt
P′ ≡ P
r′
Sistemi inerziali
abbiamo
r
r = OO' + r '
v = v OO ' + v'
a = a OO ' + a'
Se O’ si muove di moto rettilineo uniforme rispetto ad O
r
v OO' = cost
r
a OO' = 0
r r
a '= a
rr = OO' + rr '
r r
r
v = v OO' + v'
r r
a = a '
Nel sistema di riferimento O si misura a e si deduce che la forza agente è F = ma
Nel sistema di riferimento O’, si misura la stessa a e si ricava la stessa forza F = ma
Non è possibile stabilire, tramite misure effettuate in questi due sistemi, se uno di essi è
in quiete o è in moto. Tali sistemi si dicono sistemi inerziali.
Sistemi inerziale: sistema i cui vale rigorosamente la legge di inerzia,
un corpo che si muove con velocità arbitraria in qualunque direzione, si muove di moto
rettilineo
rimaneIIIin
quiete
A.Romerouniforme o, se è in quiete
Dinamica
Moti
Relativi
2
P′ ≡ P
r′
r
Sistemi non inerziali
r = OO' + r'
Se il sistema O’ si muove con velocità variabile
v
v
v
'
=
+
OO '
a = a OO' + a'
v OO' ≠ cost
a OO' ≠ 0
a' = a − a OO '
Per cui un osservatore su O (nel sistema in quiete)vedrà
mentre su O’ (sistema accelerato aOO’ ≠0)vedrà
F = ma
F' = ma'= m(a − a OO' ) = F − ma OO'
Forza apparente: non deriva dalle interazioni fondamentali
ed esiste solo nei sistemi non inerziali
Un sistema accelerato è un sistema non inerziale: in questo sistema non vale la legge di
inerzia, F=0 non comporta a’= 0 ma a’=aOO’. In un sistema non inerziale in assenza di forze
Fapparenti=maOO’
fondamentali, agiscono forze apparenti
Sono sistemi inerziali i sistemi in quiete o in moto rettilineo uniforme.
I sistemi per i quali aOO’ ≠0 non sono inerziali.
I punti in tali sistemi sono soggetti a forze apparenti
Sistemi non
inerziali
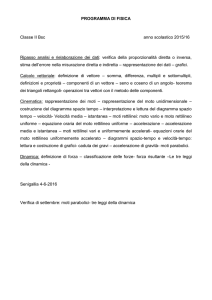
Esempio
r
r
f = mg
r
a
r
r
f = mg
r
a
r
r
f = −ma
r
a
Osservatore inerziale
A.Romero
Dinamica III Moti Relativi
r
r
f = mg
r
a
Osservatore non inerziale
4
Moti relativi
y'
Traslazione
y
r'
r
O
P ≡ P'
Teorema delle velocità relative
vOO'
O'
x'
versori non variano nel tempo
x
Rotazione
In generale si può dimostrare che:
v = v'+ v OO' + ω × r'
ω
Teorema delle velocità relative
versori variano nel tempo
Termine correttivo per passare da un sistema
all’altro: velocità di trascinamento vt
v t = v − v ' = v OO ' + ω × r '
se
ω=0
se
vOO' = 0 ⇒ v t = ω×r'
⇒ v t = v OO'
(solo traslazione -caso già visto)
(solo rotazione)
Moti relativi
Teorema delle accelerazioni relative
Nell’ipotesi in cui ω: costante, si può dimostrare il
teorema delle accelerazioni relative:
a = a '+ a OO ' + ω × (ω × r ' ) + 2 ω × v '
at: accelerazione di trascinamento, dipende
dai parametri del moto relativo tra i due
sistemi di riferimento
a = a'+a t + a c
A.Romero
ac: accelerazione complementare o di
Coriolis e dipende dal moto di P rispetto al
sistema mobile (v’)
⇒ a = a'+aOO'
se
ω=0
se
vOO' = 0 ⇒ a = a '+ ω × (ω × r ' ) + 2 ω × v ' (solo rotazione)
Dinamica III Moti Relativi
(solo traslazione -caso già visto)
6
Moti relativi
– Traslazione
z
Caso 1:
ω=0
a OO' = 0
o
y
x Moto rettilineo uniforme a relativa nulla
Caso 2:
ω=0
z
a OO' ≠ 0
o
y
A.Romero
x
Moto traslatorio a diversa da zero
Dinamica III Moti Relativi
7
Moti relativi
– Traslazione
Trasformazioni Galileiane
Riprendiamo il primo caso studiato. O’ si muove lungo
una traiettoria rettilinea Supponiamo il moto traslatorio
lungo l’asse x (che coincide con l’asse x’ come mostrato
in figura)
Caso 1:
a OO' = 0
O e O’: inerziali
r = OO' + r'
r = v O ' t + r'
v = v '+ v OO' + ω × r '
v = v'+ v OO'
a = a '+ a OO ' + ω × (ω × r ' ) + 2 ω × v '
a = a'
Proiettando sugli assi:
ω=0
x '= x - v O' t
y'= y
z'= z
v x '= v x − vOO'
v y '= v y
v z '= v z
a'x = a x
a'y = a y
a'z = a z
Queste trasformazioni tra due sistemi inerziali si chiamano trasformazioni galileiane
A.Romero
Dinamica III Moti Relativi
8
Moti relativi - traslazione
ω=0
Caso 2: a OO' ≠ 0
O inerziale
O’ non inerziale
a OO' = a t
Se O’ ha un’accelerazione costante at e una velocità iniziale vin,
parallele e concordi all’asse x≡x’. Posizione e velocità di O’ sono :
1
OO' = x OO ' = v in t + a t t 2
2
r = OO' + r'
r'= r - OO'
v = v '+ v OO ' + ω × r '
v'= v − v OO'
a = a '+ a OO ' + ω × (ω × r ' ) + 2 ω × v '
a'= a − aOO'
1
x '= x - v in t - a t t 2
2
Proiettando sugli assi:
v x '= v x − vin − a t t
a'x = a x − a t
A.Romero
v OO ' = v in + a t t
Dinamica III Moti Relativi
y'= y
z'= z
v y '= v y
v z '= v z
a'y = a y
a'z = a z
9
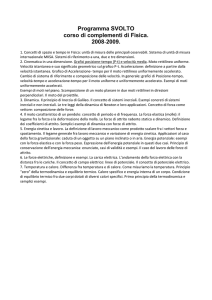
Moti relativi
– Traslazione
Esercizio
Un battello impiega due minuti ad attraversare un fiume largo 150 metri. La velocità del
battello rispetto all’acqua è di 3 m/s. la velocità della corrente del fiume è di 2 m/s. Quali
sono i possibili punti di arrivo?
y
vB
L
vH2O
|vH2O|=2 m/s
|vB|=3 m/s
x
y = v yBt
⇒150 = v yB ⋅120 ⇒ v yB =
v 2B = v 2xB + v 2yB
m
s
m
vxB2 = −2,73
s
vxB1 = +2,73
⇒ 9 = v 2xB + 1,252
L=150 m
T=2 min =120 s
150
m
=1,25
120
s
⇒ vxB = ±2,73
m
s
Moto nel verso della corrente:
Moto contro-corrente:
controcorrente:
x1 = ( v xB1 + v H O )t = (-2,73 + 2) ⋅120 = −87,2m
A.Romero
nel
verso della corrente:
xDinamica
= (v xB2III+Moti
vH ORelativi
)t = (2,73+ 2) ⋅120 = 567m
2
2
2
10
Moti relativi
– Traslazione
Esercizio
Nel sistema O viene lasciato cadere un punto lungo l’asse z da un’altezza h, cosa vede O’,
se si muove di moto rettilineo uniforme con velocità vO’?
Equazioni del moto nel sistema O:
x =0
y=0
vx = 0
vy = 0
ax =0
ay = 0
1
z = h − gt 2
2
v z = -gt
a z = −g
In O’ si ha, secondo le trasformazioni galileiane:
x = − v O' t
v x = − v O'
ax =0
y=0
vy = 0
ay = 0
1
z = h − gt 2
2
v z = -gt
a z = −g
In O’ il moto è composto da un moto rettilineo uniforme lungo l’asse x’ con velocità –vO’ e
da un uniformemente accelerato lungo l’asse z: la traiettoria è un arco di parabola
Se invece il punto è inizialmente in quiete in O’ ed è
lasciato cadere in questo sistema, la situazione è quella
rappresentata in figura:
A.Romero
Dinamica III Moti Relativi
11
Moti relativi - rotazione
Rotazione
y
x’
y’
ω Si considerano due sistemi di riferimento con origine in comune
(r=r’), uno in rotazione rispetto all’altro
x
O≡O’
ω = costante
a OO' = 0
v OO' = 0
r = OO' + r'
r = OO' + r'
v = v'+ω × r
v = v '+ v OO ' + ω × r '
a = a '+ a OO ' + ω × (ω × r ' ) + 2 ω × v '
a = a '+ ω × (ω × r ' ) + 2 ω × v '
a' = a − ω × (ω × r ' ) − 2 ω × v '
ma' = F + F centr + F Cor
Con:
Forze apparenti
Fcentr: forza centrifuga Fcentr = − m ω × (ω × r ' )
FCor: forza di Coriolis FCor = − 2 m ω × v '
A.Romero
Dinamica III Moti Relativi
12
Es: Filo a piombo sospeso a punto fuori asse di rotazione su piattaforma rotante
Il filo si dispone con angolo θ che cresce con ω e con distanza da asse di rotazione. O inerziale
(fig b) vede corpo soggetto a mg e T
T + mg = ma = − mω r u r
2
ω2 r
Tsenθ = mω r ; T cos θ = mg ⇒ tgθ =
g
2
. O’ che ruota (fig c) vede corpo fermo e soggetto a forze mg, T e Fc. Le forze vere sono
equilibrate da Fc apparente; tg θ =ω2r/g anche per O’. Se misuro θ trovo a
Fcentr = −T − mg ; Fcentr = − ma = mω2 r u r
A.Romero
Dinamica III Moti Relativi
13
Moti relativi – rotazione
Esempio forza di centrifuga e forza di Coriolis
Consideriamo due sistemi di riferimento, uno inerziale O, e l’altro solidale con una
piattaforma rotante con velocità angolare ω.
Si lega un punto P con filo all’asse di rotazione e diamo una velocità ωr in modo che il
punto ruoti con la stessa velocità angolare del sistema O’
v
r
T
y
O
r
a
Per O il punto descrive un moto
circolare uniforme e l’unica forza
in gioco è la tensione del filo T
x
forza centrifuga
Per O’ il punto è fermo v’=0 e a’=0, ma
osservando il filo teso, O’ è costretto ad
ammettere che esiste un’altra forza che agisca
verso l’esterno bilanciando la tensione del filo:
la forza centrifuga
A.Romero
Dinamica III Moti Relativi
y’
O’
r
T
mv2
r̂
r
x’
14
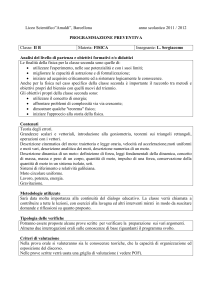
Moti relativi – rotazione
Esempio forza di centrifuga e forza di Coriolis
y’
O’
mv2
r̂
r
r
T
x’
Per verificare la sua ipotesi (esistenza di una
forza centrifuga), O’ taglia il filo tra l’origine ed
il punto e immagina di vedere il punto
allontanarsi radialmente, sotto l’effetto della
forza centrifuga
Dopo il taglio:
v
r
T
y
O
x
r
a
dopo il taglio, l’osservatore in O vede il
punto muoversi di moto rettilineo
uniforme in direzione tangente alla
circonferenza
dopo il taglio, l’osservatore in O’ non osserva il moto atteso
(rettilineo lungo la direzione radiale), ma osserva un moto
curvilineo
O’ deve ipotizzare che sul punto agisca un’altra forza, che non si
manifesta quando il corpo è in quiete: è la forza di Coriolis
A.Romero
Dinamica III Moti Relativi
15
Moto della terra
Quali sono i sistemi inerziali?Un sistema con origine nel centro di massa del sistema solare
e con assi diretti a verso le stelle fisse, è un buon sistema inerziale
Normalmente le misure sono fatte rispetto al sistema di riferimento terrestre, ma qualsiasi
riferimento solidale con la Terra non è un sistema inerziale! Nel sistema di riferimento
terrestre:
T=24 h = 8,64 104s
ω: costante=2π/T=7,29 10-5rad/s
a = a '+ a OO ' + ω × (ω × r ' ) + 2 ω × v '
Accelerazione di gravità
per un Sistema Inerziale
g 0 = g + ω × (ω × R ' ) + 2 ω × v '
Accelerazione di gravità
rispetto a un sistema terrestre
Velocità di un oggetto rispetto
al sistema terrestre
g = g 0 − ω × (ω × R ' ) − 2 ω × v '
Termine della Forza centrifuga
Termine della Forza di Coriolis
Il termine centrifugo è perpendicolare ad asse terrestre. Correzione a g a
latitudine di 450 è 2,4 10-2 m/s2 cioè una deviazione di circa 0,1 0
A.Romero
16