Capitolo III – Cenni di cinematica dei fluidi
III.1 – Elementi caratteristici del moto.
Nella descrizione del moto di un fluido è utile far riferimento a particolari famiglie di curve, nel
seguito sinteticamente descritte.
III.1.1-Traiettorie
Per traiettoria di un elemento fluido si intende il luogo geometrico delle posizioni occupate
dall’elemento durante il moto. La traiettoria del singolo elemento è data in forma parametrica in
funzione del tempo e delle coordinate del punto occupato dall’elemento nell’istante iniziale:
x = X (x0 , y 0 , z 0 , t )
y = Y (x0 , y 0 , z 0 , t )
z = Z (x , y , z , t )
0
0
0
(1)
Le coordinate del punto iniziale variano nel dominio descrivente la configurazione del corpo fluido
nell’istante iniziale, fornendo così la famiglia delle traiettorie del corpo fluido considerato.
In pratica le traiettorie possono essere ottenute a partire dalla definizione del vettore spostamento
elementare: dx=u dt. In componenti cartesiane si ha:
dx = udt
dy = vdt
dz = wdt
(2)
Le traiettorie si ottengono pertanto integrando le (2), a partire dalla posizione iniziale.
III.1.2-Linee di flusso
Si consideri, in un dato istante t, il campo di velocità del corpo fluido, caratterizzato in ogni punto
da modulo, direzione e verso. Le linee tangenti in ogni loro punto al vettore velocità sono dette
linee di flusso. L’equazione delle linee di flusso è fornita dalla condizione di parallelismo imposta
tra il vettore di velocità u (di componenti cartesiane u, v, w) e il vettore elemento d’arco ds (di
componenti cartesiane dx, dy, dz) della linea di flusso considerata:
u × ds = 0
(3)
Tale condizione, utilizzando le componenti cartesiane dei vettori, assume la seguente espressione: 1
u
v
w
=
=
dx dy dz
(4)
1
Si ricorda infatti che il prodotto vettoriale tra due vettori u, ds può essere calcolato per componenti tramite lo sviluppo
j k
i
del determinante: u v w rispetto agli elementi della prima riga. Si ha pertanto:
dx dy dz
u × ds = (vdz − wdy )i + (wdx − udz )j + (udy − vdx )k . Imponendo che le tre componenti siano nulle si ottiene la condizione
(4).
1
La conformazione delle linee di flusso varia da istante a istante: solo se il moto è permanente, la
famiglia delle linee di flusso resta costante e coincide con la famiglia delle traiettorie.
III.1.3-Linee di emissione o di fumo
Si consideri un punto fisso P rispetto al corpo fluido in movimento. Ad un dato istante t si consideri
il luogo geometrico dei punti occupati dagli elementi fluidi passati per il punto fisso P, negli istanti
che precedono t. Tale luogo geometrico è detto linea di emissione o di fumo, all’istante
considerato. La conformazione delle linee di emissione varia da istante a istante. Se il moto è
permanente la famiglia delle linee di emissione coincide con la famiglia delle traiettorie.
III.2 – Il campo di velocità nell’intorno di un punto.
Si consideri un punto P all’interno di un corpo fluido, definito dal vettore posizione x. Sia u la
velocità in tale punto. La velocità nell’intorno di P, ossia nella posizione individuata dal vettore
x+dx, di componenti x+dx,y+dy,z+dz, può essere espressa dalla:
u(x + dx , y + dy , z + dz ) = u( x , y , z ) +
∂u
∂u
∂u
dx +
dy +
dz
∂x
∂y
∂z
(5)
in cui l’espansione in serie di Taylor viene arrestata al primo ordine e il resto viene trascurato. Per
semplicità di notazione si è omessa la dipendenza esplicita dal tempo.
Si noti che dalla (5) si ricava la variazione spaziale del vettore velocità, espressa come una
combinazione lineare delle sue derivate spaziali con coefficienti le quantità infinitesime dx,dy,dz:
du = u( x + dx , y + dy , z + dz ) − u( x , y , z ) =
∂u
∂u
∂u
dx +
dy +
dz
∂x
∂y
∂z
(6)
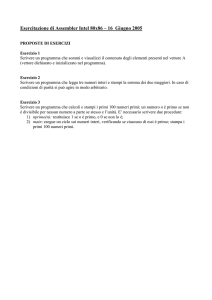
du, in quanto è la differenza delle velocità agli estremi del segmento dx di componenti dx,dy,dz
(figura III.1) rappresenta fisicamente la variazione nel tempo di quest’ultimo: ossia la velocità
con cui si deforma.
u(x+dx)
u(x+dx)
dx
u(x)
x+dx
du=u(x+dx)- u(x)
P
x
Figura III.1 Rappresentazione della variazione di velocità nell’intorno del punto P.
Le componenti cartesiane di du sono date da:
2
-u(x)
∂u
∂u
∂u
du = ∂x dx + ∂y dy + ∂z dz
∂v
∂v
∂v
dv = dx + dy + dz
∂x
∂y
∂z
∂w
∂w
∂w
dx +
dy +
dz
dw =
∂x
∂y
∂z
(7 )
Le quali possono essere viste come il risultato del prodotto (riga per colonna) della matrice:
∂u
∂x
∂v
∂x
∂w
∂x
∂u
∂y
∂v
∂y
∂w
∂y
∂u
∂z
∂v
∂z
∂w
∂z
(8)
per il vettore colonna di componenti dx,dy,dz.
La matrice (8) può essere decomposta nel seguente modo, con semplici operazioni di somma e
sottrazione:
∂u ∂u ∂u
∂x ∂y ∂z
∂v ∂v ∂v
∂x ∂y ∂z =
∂w ∂w ∂w
∂x ∂y ∂z
1 ∂u ∂v
∂u
+
2 ∂y ∂x
∂x
1 ∂u ∂v
∂v
+
∂y
2 ∂y ∂x
1 ∂u ∂w 1 ∂v ∂w
+
+
2 ∂z ∂x 2 ∂z ∂y
1 ∂u ∂w
0
+
2 ∂z ∂x
1 ∂v ∂w 1 ∂v ∂u
+
+ −
2 ∂z ∂y 2 ∂x ∂y
∂w ∂u
∂w
−
∂z
∂x ∂z
∂u ∂v ∂u ∂w
− −
∂y ∂x ∂z ∂x
∂v ∂w
−
0
∂z ∂y
∂w ∂v
0
−
∂y ∂z
(9)
Si osservi che la prima matrice a secondo membro è una matrice simmetrica, mentre la seconda
matrice a secondo membro è anti-simmetrica: ossia l’elemento appartenente alla ima riga e jma
colonna (con i diverso da j) ha modulo uguale e segno opposto all’elemento appartenente alla jma
riga e ima colonna. Gli elementi delle righe della matrice (8) coincidono con le componenti
cartesiane del gradiente delle componenti cartesiane della velocità. Tale matrice viene pertanto
indicata come grad(u).
Le matrici a secondo membro della (9) vengono indicate rispettivamente con i simboli D,W i cui
elementi d ij , ωij si possono ottenere dalle espressioni (9), per confronto:
3
∂u
∂v
∂w
1 ∂u ∂v
1 ∂u ∂w
1 ∂v ∂w
, d yy = , d zz =
, d xy = d yx = + , d xz = d zx = +
, d yz = d zy = +
∂x
∂y
∂z
2 ∂y ∂x
2 ∂z ∂x
2 ∂z ∂y
1 ∂v ∂u
1 ∂u ∂w
1 ∂v ∂w
ω xx = ω yy = ω zz = 0, ω xy = −ω yx = − − , ω xz = −ω zx = − , ω yz = −ω zy = −
2 ∂x ∂y
2 ∂z ∂x
2 ∂z ∂y
d xx =
(10)
Si ha pertanto: grad(u ) = D + W . Di conseguenza la variazione spaziale di velocità (6) può essere
espressa dalla:
du = grad(u )dx = Ddx + Wdx
(11)
Gli elementi d ij .ω ij hanno dimensioni fisiche coincidenti con quelle di una velocità per unità di
lunghezza (s-1). Il loro significato fisico può essere illustrato considerandone separatamente gli
effetti su un corpo fluido definito in modo opportuno. A tale scopo si consideri un elemento fluido
piano, di forma circolare, di raggio dr, centrato attorno nell’origine degli assi (figura III.2). Poichè
l’elemento fluido è piano, non dipende dalla coordinata z.
y
dx=dr cos(α)
α
x
dy=dr sin(α)
Figura III.2. L’elemento fluido circolare
Si supponga inoltre che l’unico coefficiente non nullo sia d xx = ∂u e si calcoli l’incremento di
∂x
velocità sui punti della circonferenza. Applicando la (11) e tenendo conto del fatto che:
dx = dr cos(α ), dy = dr sin (α ) , si ha:
du = d xx dx =
∂u
dr cos(α )
∂x
(12)
La variazione di velocità tende a far contrarre o dilatare l’elemento fluido nella direzione dell’asse
x a seconda che sia: d xx > 0 o d xx < 0 . In figura III.3 è rappresentata schematicamente la variazione
di velocità dovuta ad un d xx > 0 . Analogo risultato si avrebbe avuto con d yy = ∂v , con una
∂y
4
variazione di velocità diretta come l’asse delle y, di dilatazione o contrazione per l’elemento, a
seconda che: d yy > 0 o d yy < 0 .
y
du =
∂u
dr cos(α )
∂x
x
Figura III.3. Variazione di velocità di pura dilatazione.
Si supponga ora che l’unico coefficiente non nullo sia d xy = 1 ∂u + ∂v e si calcoli l’incremento di
2 ∂y ∂x
velocità sui punti della circonferenza. Applicando la (11) si ottengono le seguenti componenti della
variazione di velocità:
du = d xy dy = d xy dr sin(α )
dv = d xy dx = d xy dr cos(α )
(13)
illustrate schematicamente in figura III.4:
y
dv = d xy dr cos(α )
x
du = d xy dr sin (α )
Figura III.4. Variazione di velocità di pura distorsione
Il campo di velocità (13) tende a far cambiare forma all’elemento fluido, ma non ne altera il
volume: si tratta perciò di un campo di velocità di pura distorsione.
5
Infine si supponga che l’unico coefficiente non nullo sia ω xy = − 1 ∂v − ∂u e che ω xy < 0 : le
2 ∂x
∂y
componenti di velocità risultano le seguenti:
du = ω xy dy = ω xy dr sin(α )
dv = −ω xy dx = −ω xy dr cos(α )
(14)
illustrate schematicamente in figura III.5:
y
dv = −ω xy dr cos(α )
du = ω xy dr sin (α )
x
Figura III.5. Campo di velocità di pura rotazione.
L’effetto è quello di tendere a far ruotare l’elemento fluido, senza variarne il volume e la forma. Si
tratta perciò dell’effetto tipico di un campo di velocità di rotazione rigida.
I risultati così ottenuti possono essere generalizzati:
•
•
•
gli elementi dxx, dyy, dzz, generano campi di velocità di pura dilatazione o contrazione nelle
direzioni x, y, z;
gli elementi dxy, dyz, dzx, generano campi di velocità di pura distorsione, senza variazione
di volume, sui piani xy, yz, zx;
gli elementi ωxy, ωyz, ωzx generano campi di velocità di rotazione di corpo rigido sui piani
xy, yz,zx;
Vale la pena soffermarsi brevemente sul contributo dato dalla rotazione rigida.
La velocità sui punti esterni dell’elemento circolare può essere definita come il prodotto vettoriale
di un vettore velocità di rotazione Ω, perpendicolare al piano, e del vettore posizione dx del punto
sulla circonferenza. Definendo il vettore Ω come:
j
k
i
∂v ∂u
Ω = ∇ × u = ∂ ∂x ∂ ∂y 0 = − k
∂x ∂y
u
0
v
La variazione di velocità risulta espressa dalla:
6
(15)
du =
1
Ω × dx
2
(16)
Il discorso può essere generalizzato al caso di moti tridimensionali, definendo il vettore Ω come:
j
k
i
∂w ∂v ∂u ∂w ∂v ∂u
Ω = ∇ × u = ∂ ∂x ∂ ∂y ∂ ∂z =
− i + −
j + − k
∂y ∂z ∂z ∂x ∂x ∂y
u
v
w
(17 )
Il vettore Ω, le cui componenti sono definite dalla (17), può essere visto come la velocità di
rotazione rigida definita nel punto occupato dall’elemento fluido ed è definito dal prodotto
vettoriale del vettore nabla per il vettore velocità o rotore della velocità:
(18)
Ω = ∇×u
Il vettore Ω è detto vorticità.
Va fatta infine una importante osservazione. Tutti i risultati conseguiti, in particolare le definizioni
degli elementi delle matrici e delle componenti di Ω valgono in un riferimento cartesiano
ortogonale. In riferimenti differenti (ad esempio sferico o cilindrico) ciò che si conserva è la
linearità della relazione tra il campo di velocità nell’intorno di un punto e il vettore spostamento
che definisce l’intorno del punto, mentre le espressioni delle singole componenti di D,W e
Ω variano a seconda del sistema di riferimento adottato.
7