Manuale Edizione 05/2005
motion
control
ADI4
Interfaccia analogica dell’azionamento per 4 assi
SIMATIC, SIMOTION, SINUMERIK
Premessa, Contenuto
ADI4 - Interfaccia analogica
dell’azionamento per 4 assi
Valido per
Controllo
SINUMERIK 802D
SINUMERIK 840Di
SINUMERIK 840DiE (variante per l’esportazione)
SIMOTION P
SIMOTION C
SIMOTION D
CPU della tecnologia SIMATIC
6FC5 297-0BA01-0CP4
Edizione 05.2005
1
Parametrizzazione
2
Messa in servizio
3
Condizioni marginali
4
Indice analitico
Manuale
software
ADI4
Descrizione dei componenti
hardware
versione
1.3
Avvertenze di sicurezza
Questo manuale contiene avvertenze alle quali occorre attenersi per garantire la propria sicurezza
personale e per evitare danni materiali. Le avvertenze sono contrassegnate da un triangolo e, a seconda
del grado di pericolo, rappresentate nel modo seguente:
!
!
!
Pericolo di morte
significa che il mancato rispetto delle misure precauzionali comporta la morte, gravi lesioni fisiche o di
ingenti danni materiali.
Pericolo
significa che il mancato rispetto delle misure precauzionali può provocare, la morte, gravi lesioni fisiche o
di ingenti danni materiali.
Precauzione
significa che la non osservanza delle relative misure di sicurezza può causare leggere lesioni alle
persone o danni materiali.
Precauzione
significa che il mancato rispetto delle misure precauzionali può comportare danni materiali.
Attenzione
Segnala che la mancata osservanza delle relative avvertenze può produrre risultati imprevisti o condizioni
inattese.
Personale qualificato
La messa in servizio e l’esercizio di un apparecchio devono essere effettuati solo da personale qualificato. Con personale qualificato, nel senso dei criteri di sicurezza tecnica di questo manuale, si intendono
persone autorizzate a mettere in servizio, collegare a terra e contrassegnare gli apparecchi, i sistemi e i
circuiti elettrici secondo gli standard di sicurezza.
Uso conforme alle prescrizioni
Osservare quanto segue:
!
Pericolo
L’apparecchio deve essere impiegato esclusivamente per l’uso previsto nel catalogo e nella descrizione
tecnica e solo in combinazione con altri apparecchi e componenti consigliati o omologati da Siemens.
Per garantire un funzionamento perfetto e sicuro del prodotto è assolutamente necessario che il trasporto,
l’immagazzinamento, l’installazione e il montaggio siano effettuati in modo appropriato e che sia
assicurato un utilizzo operativo corretto supportato da un’accurata manutenzione.
Marchi di prodotto
SIMATIC, SIMATIC HMI, SIMATIC NET, SINUMERIK e SIMOTION sono marchi della
SIEMENS AG.
Le rimanenti sigle possono essere marchi il cui utilizzo tramite terzi può violare i diritti dei titolari.
Copyright Siemens AG 2005 All Rights Reserved
Esclusione della responsabilità
E’ vietata la duplicazione di questo manuale, l’utilizzo e la divulgazione dei
suoi contenuti se non dietro espressa autorizzazione. Le trasgressioni sono
passibili di risarcimento dei danni. Tutti i diritti sono riservati, in particolare
quelli relativi ai brevetti e ai marchi registrati.
In questa documentazione abbiamo verificato che il contenuto tecnico
corrisponda realmente all’hardware e al software descritti. Non potendo
comunque escludere eventuali differenze, non garantiamo una concordanza
totale. Il contenuto di questa documentazione viene tuttavia verificato
periodicamente e le eventuali correzioni o modifiche vengono inserite nelle
successive edizioni.
Siemens AG
Automation and Drives
Postfach 4848
90437 Nürnberg
Germania
-2
Siemens Aktiengesellschaft
Siemens AG 2005
Ci riserviamo eventuali
modifiche AG
tecniche.
Siemens
2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
ADI4 - Interfaccia analogica dell’azionamento per 4 assi
Prefazione
Documentazione SINUMERIK
La documentazione SINUMERIK è suddivisa in 3 livelli:
Documentazione generale
Documentazione per l’utente
Documentazione per il costruttore / per il service
Per ulteriori informazioni sulle altre pubblicazioni relative a SINUMERIK 840D
sl/840D/840Di/810D e sulle pubblicazioni valide per tutti i controlli numerici SINUMERIK (ad es. interfaccia universale, cicli di misura...) rivolgersi alla più vicina rappresentanza Siemens.
Per un elenco delle pubblicazioni aggiornato mensilmente con le relative lingue
disponibili, consultare l’indirizzo Internet:
http://www.siemens.com/motioncontrol
Seguire i punti del menu ”Supporto” > ”Documentazione tecnica” > ”Elenco delle
pubblicazioni”.
L’edizione internet del DOConCD, il DOConWEB, si trova in:
http://www.automation.siemens.com/doconweb
Destinatari della documentazione
La presente documentazione si rivolge ai costruttori di macchine utensili (progettisti, elettricisti e installatori, addetti alla manutenzione e operatori). La pubblicazione
contiene tutte le informazioni necessarie per l’installazione, il collegamento e la
parametrizzazione dell’unità.
Funzionalità standard
La presente documentazione descrive la funzionalità standard dell’unità ADI4.
L’unità può contenere altre funzioni oltre a quelle descritte in questo manuale.
Ciò non costituisce però obbligo di implementazione di tali funzioni in caso di
nuove forniture o di assistenza tecnica.
Hotline
A&D Technical Supports
A&D Technical Supports
Tel.: +49 (0) 180 5050-222
Fax: +49 (0) 180 5050-223
e-mail: [email protected]
Internet:www.siemens.com/automation/support -request
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Prefaz.-3
Prefazione
Per domande relative alla documentazione (suggerimenti, correzioni) inviateci un
fax o una e–mail al seguente indirizzo:
Fax: +49 (0) 9131 98 - 63315
e-mail: [email protected]
Modulo fax: vedere il modulo in fondo al manuale
Indirizzo Internet
http://www.siemens.com/motioncontrol
Prefaz.-4
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Prefazione
Modifiche nell’edizione 04/2004
L’edizione 04/2004 contiene le seguenti modifiche rispetto all’edizione 02/2003:
N. progr.
modifica
1.
SIMATIC
Condizioni marginali relative a:
- CPU in tecnologia SIMATIC
Modifiche nell’edizione 08/2004
N. progr.
modifica
1.
Generalità
2.
3.
Condizioni marginali relative a:
- Assi controllati (assi senza encoder)
- Interfaccia encoder esterna (encoder senza asse)
- Misura al volo
Parametrizzazione
- Ciclo DP minimo 1 ms.
SIMOTION
Presupposti
Condizioni marginali relative a:
- Ricerca del riferimento mediante tacca di zero esterna
SIMATIC
Presupposti
Modifiche nell’edizione 05/2005
N. progr.
modifica
1.
Generalità
2.
SINUMERIK
3.
Codici di errore nel valore attuale encoder aggiuntivo Gx_XIST2
Mandrini con encoder a bassa risoluzione
Correzioni
- Rampa di shutdown e valore parametro 0
- Ricerca del punto di riferimento mediante tacca di zero
esterna: ”Senza modo conforme 611U”
La funzione: ”Asse in parcheggio” ora è disponibile.
Per gli assi controllati (assi senza encoder) non è più necessario
parametrizz. encoder perché venga emesso valore di riferimento.
Encoder lineare con tacche di zero / tacche di riferimento codificate in base alla distanza
- Messa in servizio
- Encoder lineari abilitati
Livello tensione con mandrino unipolare / motore e M3, M4, M5.
Correzioni
- Nessuna ricerca del punto di riferimento mediante tacca di
zero esterna: ”Senza modo conforme 611U” possibile
- Nessuna ricerca del punto di riferimento mediante tacca di
zero encoder e camma di riferimento possibile
SIMOTION
Correzioni
- Nessuna ricerca del punto di riferimento mediante tacca di
zero esterna: ”Senza modo conforme 611U” possibile
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Prefaz.-5
Prefazione
Prefaz.-6
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Contenuto
1
Informazioni generali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1
1.1.1
1.1.2
1.1.3
1.1.4
2
3
1-9
Panoramica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Proprietà . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Principali caratteristiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Numero di ordinazione e versione firmware . . . . . . . . . . . . . . . . . . . . . . . . .
Condizioni marginali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-9
1-9
1-9
1-9
1-10
Descrizione dei componenti hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-11
2.1
Panoramica dei collegamenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-11
2.2
2.2.1
2.2.2
2.2.3
2.2.4
2.2.5
2.2.6
2.2.7
2.2.8
2.2.9
Descrizione delle interfacce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Panoramica delle interfacce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interfaccia (X1): Alimentazione esterna . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interfaccia (X2): PROFIBUS DP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interfaccia (S2): Indirizzo PROFIBUS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interfaccia (X3): Interfaccia analogica del valore di riferimento . . . . . . . . .
Interfacce (X4-1/X4 -2/X5 -1/X5 -2): Interfacce encoder . . . . . . . . . . . . . .
Interfaccia (X6-1): Uscite digitali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interfaccia (X6-2): Ingressi digitali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interfaccia (H1/H2): stato dell’unità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-12
2-12
2-12
2-13
2-13
2-15
2-16
2-20
2-23
2-25
2.3
Montaggio in armadio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-26
2.4
Alimentazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-26
2.5
Messa a terra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-28
2.6
Panoramica dei collegamenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-29
2.7
Disegno quotato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-30
2.8
Dati tecnici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-31
Parametrizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-33
3.1
Requisiti (SINUMERIK 802D) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-33
3.2
Requisiti (SINUMERIK 840Di) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-33
3.3
Requisiti (SIMOTION) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-34
3.4
Requisiti (CPU in tecnologia SIMATIC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-34
3.5
3.5.1
3.5.2
Parametrizzazione di PROFIBUS DP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sequenza di parametrizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Inserimento di uno slave DP ADI4 nella configurazione . . . . . . . . . . . . . . .
3-35
3-35
3-35
3.6
Parametri PROFIBUS (SINUMERIK 802D) . . . . . . . . . . . . . . . . . . . . . . . . .
3-37
3.7
Parametri PROFIBUS (SINUMERIK 840Di), (SIMOTION) e (CPU in
tecnologia SIMATIC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indirizzo PROFIBUS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-37
3-37
3.7.1
E Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Conten.-7
Contenuto
3.7.2
3.7.3
3.7.4
Tipo di telegramma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indirizzi di I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Coerenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-39
3-42
3-43
3.8
Parametri di funzione (SINUMERIK 802D) . . . . . . . . . . . . . . . . . . . . . . . . . .
3-43
3.9
3.9.11
3.9.12
3.9.13
Parametri di funzione (SINUMERIK 840Di), (SIMOTION) e (CPU in
tecnologia SIMATIC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tipo di encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mandrino unipolare (o motore unipolare) . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Rampa di shutdown . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tempo di ritardo dello shutdown . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Errori tollerabili di funzionalità vitale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit riservati per la risoluzione fine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modo conforme 611U . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ricerca del riferimento mediante tacca di zero dell’encoder . . . . . . . . . . .
Ricerca del riferimento mediante tacca di zero esterna . . . . . . . . . . . . . . .
Ricerca del punto di riferimento mediante tacca di zero encoder e camme
di riferimento (SIMOTION) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Condizioni marginali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Condizioni marginali (SIMOTION) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Condizioni marginali (CPU in tecnologia SIMATIC) . . . . . . . . . . . . . . . . . . .
3.10
3.10.1
3.10.2
3.10.3
3.10.4
3.10.5
3.10.6
3.10.7
3.10.8
3.10.9
Parametrizzazione della comunicazione DP . . . . . . . . . . . . . . . . . . . . . . . . .
Attivazione del ciclo DP equidistante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Master di equidistanza della percentuale ciclica TDX . . . . . . . . . . . . . . . . .
Ciclo DP equidistante TDP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tempo ciclo DP TDP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ciclo applicazione master TMAPC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Rilevamento valore attuale Ti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Assunzione valore di riferimento To . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sincronizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Condizioni marginali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-56
3-56
3-58
3-59
3-60
3-60
3-63
3-63
3-64
3-65
Messa in servizio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-69
4.1
4.1.1
Messa in servizio del controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Encoder lineare con tacche di zero / tacche di riferimento codificate
in base alla distanza (SINUMERIK 840Di) . . . . . . . . . . . . . . . . . . . . . . . . . .
4-69
Condizioni marginali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-73
3.9.1
3.9.2
3.9.3
3.9.4
3.9.5
3.9.6
3.9.7
3.9.8
3.9.9
3.9.10
4
5
3-44
3-45
3-46
3-47
3-47
3-47
3-48
3-49
3-51
3-52
3-53
3-54
3-54
3-54
4-69
Indice analitico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Indice-75
Conten.-8
E Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Informazioni generali
1.1
1.1.1
1
Panoramica
Proprietà
L’unità ADI4 (Analog Drive Interface for 4 Axis) è un’unità d’interfaccia attraverso
cui è possibile far funzionare fino a 4 azionamenti con interfaccia analogica del
valore di riferimento sul PROFIBUS-DP equidistante.
La comunicazione tra il controllore e ADI4 ha luogo attraverso un tipo di telegramma specifico ADI4 che contiene, oltre ai dati I/O digitali per azionamento, un
telegramma specificato secondo il profilo PROFIDrive (telegramma standard 3).
Nell’ambito della comunicazione DP ciclica, i valori attuali dell’azionamento (valori
encoder) vengono trasferiti dall’unità ADI4 tramite PROFIBUS-DP al controllore, e
i valori di riferimento della velocità calcolati dal controllore vengono trasferiti
all’unità ADI4.
I valori di riferimento della velocità trasferiti vengono poi trasmessi, come valori
analogici, dall’unità ADI4 agli azionamenti.
1.1.2
Principali caratteristiche
L’unità presenta la seguenti caratteristiche:
connessione PROFIBUS-DP (max. 12 Mbit/s)
4 servointerfacce
- Ingressi: encoder TTL/SSI per sistemi di misura incrementali e assoluti
- Uscite: $10V analogiche
segnali di ingresso/uscita digitali generali e specifici dell’azionamento
indicatore di stato on board tramite 4 LED di diagnostica
Per alimentare l’unità e le uscite digitali è necessaria un’alimentazione esterna
(+24 V DC).
1.1.3
Numero di ordinazione e versione firmware
Numero di ordinazione
Numero di ordinazione (MLFB): 6FC5 211-0BA01-0AA2
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
1-9
Generalità
Versione firmware
La versione del firmware non è indicata direttamente sull’unità. Tra il numero di
ordinazione e la versione del firmware esiste la seguente relazione:
Numero di ordinazione (MLFB)
1.1.4
Versione firmware
6FC5 211-0BA01-0AA0
1.1.4
6FC5 211-0BA01-0AA1
1.2.2
6FC5 211-0BA01-0AA2
1.3.1
Condizioni marginali
L’unità modulare presenta i seguenti vincoli:
1-10
uno slave DP ADI4 può funzionare solo con un PROFIBUSDP equidistante
(vedere capitolo 2, pagina 2-11)
Uno slave DP ADI4 non è uno slave DP normalizzato e certificato secondo il
profilo PROFIDrive. P. es. lo slave DP ADI4 non consente la comunicazione
aciclica.
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
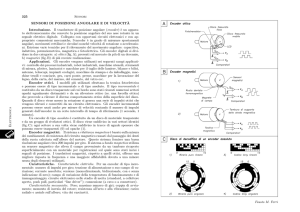
Descrizione dei componenti hardware
Panoramica dei collegamenti
Alimentazione esterna
24 V DC
X2:
Collegamento PROFIBUS
S2:
Selettori DIP per l’impostazione
dell’indirizzo PROFIBUS
X3:
Uscite analogiche dei valori di
riferimento
DC $10 V, asse 1 - 4
OFF
X1:
8
corrisponde a
indirizzo PROFIBUS:
AH = 10D
1
ON
2.1
2
X4 -2:
Collegamento encoder
per l’asse 2
X4 -1:
Collegamento encoder
per l’asse 1
X5 -2:
Collegamento encoder
per l’asse 4
X5 -1:
Collegamento encoder
per l’asse 3
X6 -2:
Collegamento per i segnali
digitali di ingresso
X6 -1:
Collegamento per i segnali
digitali di uscita
LED di diagnostica
H1:
H2:
PW
EXCH
TMP
RDY
Collegamento di messa a terra vite M6
Figura 2-1 Panoramica dei collegamenti ADI4
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
2-11
Descrizione dei componenti hardware
2.2
2.2.1
Descrizione delle interfacce
Panoramica delle interfacce
L’unità dispone delle seguenti interfacce:
Tabella 2-1
2.2.2
Panoramica delle interfacce: ADI4
Interfaccia
Denominazione
Tipo
Alimentazione esterna +24 V
X1
Connettore
PROFIBUS DP
X2
Presa
Indirizzo PROFIBUS DP
S2
Commutatore DIP
Interfaccia analogica del valore di riferimento
X3
Connettore
Collegamento encoder per l’asse 1
X4-1
Presa
Collegamento encoder per l’asse 2
X4-2
Presa
Collegamento encoder per l’asse 3
X5-1
Presa
Collegamento encoder per l’asse 4
X5-2
Presa
Uscite digitali
X6-1
Connettore
Ingressi digitali
X6-2
Connettore
Stato dell’unità
H1/H2
LED
Interfaccia (X1): Alimentazione esterna
Collegamento
Connettore tripolare MSTB 2,5/3-ST -5,08, produttore Phoenix
Configurazione dei pin
Tabella 2-2
Configurazione dei pin: alimentazione est. (X1)
Pin
Denominazione
qualsiasi1)
1
P24EXT1
VI
Alimentazione esterna dell’unità (+24 V)
2
M24EXT1
VI
Rif. per alimentazione esterna
3
PE
VI
Conduttore di protezione dell’alimentazione esterna
1) VI
Funzione
Voltage Input
Cavo di collegamento
L’utente deve provvedere ai cavi di collegamento richiesti:
cavo, sezione dei conduttori: 1,0 - 1,5 mm2 (AWG17 - AWG16)
Tensione di alimentazione
Per le specifiche della tensione di alimentazione vedere il capitolo 2.4 (pagina 2-26).
2-12
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Descrizione dei componenti hardware
2.2.3
Interfaccia (X2): PROFIBUS DP
Collegamento
Connettore femmina SUB-D a 9 poli
Configurazione dei pin
Tabella 2-3
Configurazione dei pin: PROFIBUSDP (X2)
Pin
Denominazione
qualsiasi1)
1
-
-
-
2
-
-
-
3
RxD/TxD-P
B
Dati di ricezione/di trasmissione P (conduttore B)
4
RTS
O
Request to Send
5
DGND
VO
Potenziale di riferimento dei dati (M5V)
6
VP
VO
Tensione di alimentazione - positivo (P5V)
7
-
-
-
8
RxD/TxD-N
B
Dati di ricezione/di trasmissione N (conduttore A)
9
-
-
-
1) VO
O
B
Funzione
Voltage Output
Output
Bidirectional
Connettore
6ES7 972-0BA41-0XA0; uscita cavo 350, senza connettore di collegamento
PG
6ES7 972-0BB41-0XA0; uscita cavo 350, con connettore di collegamento PG
6ES7 972-0BA12-0XA0; uscita cavo 900, senza connettore di collegamento
PG
6ES7 972-0BB12-0XA0; uscita cavo 900, con connettore di collegamento PG
6XV1 830-0EH10; a metraggio, non idoneo al trascinamento
6XV1 830-3EH10; a metraggio, idoneo al trascinamento
Cavo
Altri dati tecnici
Velocità massima di trasmissione dati: 12 MBit/s
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
2-13
Descrizione dei componenti hardware
2.2.4
Interfaccia (S2): Indirizzo PROFIBUS
L’indirizzo PROFIBUS dello slave DP ADI4 può essere impostato con l’interruttore
S2.
Indirizzo PROFIBUS impostabile: 1...127
Tabella 2-4
Significato del selettore S2
Interruttori
Significato
1
indirizzo PROFIBUS:
20 = 1
2
indirizzo PROFIBUS:
21 = 2
3
indirizzo PROFIBUS:
22 = 4
4
indirizzo PROFIBUS:
23 = 8
5
indirizzo PROFIBUS:
24 = 16
6
indirizzo PROFIBUS:
25 = 32
7
indirizzo PROFIBUS:
26 = 64
8
Non utilizzato
Attenzione
La nuova impostazione dell’indirizzo PROFIBUS diventa efficace solo dopo
tensione OFF/ON.
2-14
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Descrizione dei componenti hardware
2.2.5
Interfaccia (X3): Interfaccia analogica del valore di riferimento
Collegamento
Connettore maschio SUBD a 50 poli
Configurazione dei pin
Tabella 2-5
Configurazione dei pin: interfaccia analogica del valore di riferimento (X3)
Pin
Denominazione
qualsiasi1)
1
SW1
VO 3)
2
BS2
VO
3
SW3
VO 3)
4
BS4
VO
5-13
-
-
14
RF1_1
K 2)
”Abilitazione azionamento” asse 1, contatto a relè 1
RF2_1
K
2)
”Abilitazione azionamento” asse 2, contatto a relè 1
K
2)
”Abilitazione azionamento” asse 3, contatto a relè 1
K
2)
”Abilitazione azionamento” asse 4, contatto a relè 1
15
16
RF3_1
17
RF4_1
18-33
-
-
Funzione
Valore di riferimento asse 1 ($10V)
Riferimento per valore di riferimento asse 2
Valore di riferimento asse 3 ($10V)
Riferimento per valore di riferimento asse 4
-
-
34
BS1
VO
35
SW2
VO 3)
36
BS3
VO
37
SW4
VO 3)
38-46
-
-
47
RF1_2
K 2)
”Abilitazione azionamento” asse 1, contatto a relè 2
48
RF2_2
K 2)
”Abilitazione azionamento” asse 2, contatto a relè 2
49
RF3_2
K 2)
”Abilitazione azionamento” asse 3, contatto a relè 2
RF4_2
2)
”Abilitazione azionamento” asse 4, contatto a relè 2
50
K
Riferimento per valore di riferimento asse 1
Valore di riferimento asse 2 ($10V)
Riferimento per valore di riferimento asse 3
Valore di riferimento asse 4 ($10V)
-
1) VO Voltage Output
K
contatto a relè
2) Carico max. di corrente: 2 A per 150 VDC oppure 125 VAC
Numero max. cicli di commutazione:
- 24 V DC, 1 A: 107
- 24 V DC, 2 A: 105
3) Carico max. di corrente: 10 mA (RL: 1 kW - 2 kW)
ADI4
X3
Numero del pin:
Relè
Segnale:
”Abilitazione azionamento”
Asse 1 ... 4
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
14 ... 17
47 ... 50
2-15
Descrizione dei componenti hardware
Cavi confezionati
N. di ordinazione (MLFB):
Lunghezza del cavo:
6FX2 002-3AD01-
v35 m
Indicazioni sui codici di lunghezza sono contenute in:
Bibliografia:
2.2.6
/Z/
Catalogo NC Z
Interfacce (X4 - 1/X4 - 2/X5 - 1/X5 - 2): Interfacce encoder
Collegamento
Connettore femmina SUBD a 15 poli
Configurazione dei pin
Tabella 2-6
Configurazione dei pin: interfaccia encoder asse 1 - 4
(X4-1/X4 -2/X5 -1/X5 -2) per encoder incrementale (TTL) ed encoder
assoluto (SSI)
Designazione1)
Pin
incrementale
1
Funzione
assoluto (SSI)
non occupato
-
-
2
-
CLSx
O
Clock di scorrimento SSI
3
-
CLSx_N
O
Clock di scorrimento SSI negato
4
P5MS
VO
Tensione di alimentazione 5 V DC
5
P24SSI
VO
Tensione di alimentazione 24 V DC
6
P5MS
VO
Tensione di alimentazione 5 V DC
7
MEXT
VO
Riferimento per la tensione di alimentazione
8
non occupato
-
9
MEXT
VO
Riferimento per la tensione di alimentazione
10
Rx_S
-
I
Segnale della tacca di zero (Ua0)
11
XRx_S
-
I
Segnale della tacca di zero negato (Ua0)
12
XBx_S
-
I
Segnale encoder traccia B negato (Ua2)
13
Bx_S
-
I
Segnale encoder traccia B (Ua2)
14
XAx_S
-
I
Segnale encoder traccia A negato (Ua1)
-
DATAx_N
I
Dati SSI inversi
Ax_S
-
I
Segnale encoder traccia A (Ua1)
-
DATAx
I
Dati SSI
15
1) x
2) VO
I
O
2-16
Tipo2)
Numero dell’interfaccia encoder con X4-1=1, X4-2=2, X5-1=3, X5-2=4
Voltage Output
Signal Input
Signal Output
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Descrizione dei componenti hardware
Cavi confezionati
A seconda del tipo di encoder, possono essere utilizzati i seguenti cavi
confezionati:
Encoder incrementale (TTL) con RS422 (5 V o 24 V) 6FX2 001-2...
N. di ordinazione (MLFB): 6FX8 002-2CD01-10 (5 V)
N. di ordinazione (MLFB): 6FX5 002-2CD24-10 (24 V)
Lunghezza dei cavi:
vedere sotto, ”Lunghezze massime dei cavi”.
Encoder assoluto con SSI 6FX2 001-5...
N. di ordinazione (MLFB): 6FX8 002-2CC11-0
Lunghezza dei cavi:
vedere sotto, ”Lunghezza massima dei cavi”.
Motore 1FT5 con encoder ROD320 integrato
N. di ordinazione (MLFB): 6FX8 002-2CE02-10
Lunghezza dei cavi:
vedi sotto, ”Lunghezza massima dei cavi”.
Indicazioni sui codici di lunghezza sono contenute in:
Bibliografia:
/Z/
Catalogo NC Z
Lunghezze massime dei cavi
La lunghezza massima dei cavi dipende dai seguenti due parametri:
Tensione di alimentazione encoder
Tabella 2-7
Tensione di alimentazione encoder
Tensione di alimentazione: DC 5 V
Tolleranza
Assorbimento di
corrente
Lunghezza max. dei cavi
4,75 V - 5,25 V
x300 mA
25 m
4,75 V - 5,25 V
x220 mA
35 m
Tensione di alimentazione: DC 24 V
Tolleranza
Assorbimento di
corrente
Lunghezza max. dei cavi
20,4 V - 28,8 V
x300 mA
100 m
11 V - 30 V
x300 mA
300 m
Frequenza di trasmissione
Tabella 2-8
Frequenza di trasmissione
Tipo di encoder
Tensione alimentazione
Frequenza
Lunghezza max. dei cavi
incremental. (TTL)
5V
1 MHz
10 m
500 kHz
35 m
24 V
500 kHz
150 m
24 V
1,5 MBit/s
10 m
187,5 Kbit/s
250 m
assoluto (SSI)
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
2-17
Descrizione dei componenti hardware
Nota
Se per gli encoder incrementali è richiesto un cablaggio superiore a 25 m o 35 m,
è possibile utilizzare in alternativa tipi di encoder con una tensione di
alimentazione 24 V DC.
Precauzione
Per una corretta trasmissione dei dati dell’encoder, è necessario che non vengano
superate le lunghezze di cablaggio indicate nelle tabelle.
Tensioni di alimentazione encoder
Le tensioni di alimentazione dell’encoder devono rispettare le seguenti specifiche:
Tabella 2-9
Specifica delle tensioni di alimentazione encoder
Tensione di alimentazione 1)
P5MS
P24SSI
Tensione
minima
4,75 V
20,4 V
nominale
5V
24 V
massima
5,25 V
28,8 V
50 mVpp
3,6 Vpp
Ondulazione
massima
Carico di corrente
per collegamento encoder
0,3 A
massima
1) P5MS:
P24SSI:
1,35 A
1A
tensione di alimentazione per l’encoder (DC +5 V)
tensione di alimentazione per l’encoder (DC +24 V)
Sistemi di misura collegabili
Encoder incrementali (TTL)
- Trasmissione differenziale con RS422 (5 V o 24 V):
traccia A come segnale vero e negato (Ua1 , Ua1)
traccia B come segnale vero e negato (Ua2 , Ua2)
segnale di zero N come segnale vero e negato (Ua0 , Ua0)
- Frequenza massima di uscita: 1,5 MHz
- Spostamento di fase da traccia A a B: 90"30
- Assorbimento di corrente: max. 300 mA
- Gli encoder con tacche di zero/di riferimento codificate in base alla distanza
non sono generalmente abilitati.
2-18
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Descrizione dei componenti hardware
Encoder assoluti (SSI)
- Metodo di trasmissione: interfaccia sincrona seriale (SSI) con trasmissione
di segnale differenziale a 5 V (norma RS422):
Segnale di uscita: dati come segnale vero e negato
Segnale di ingresso: clock di scorrimento come segnale vero e negato
- Formato di output per encoder rotatorio: ”ad abete”
- Risoluzione: max. 25 bit
- Frequenza di trasmissione max.: 1 MBit/s
- Assorbimento di corrente: max. 300 mA
Attenzione
In combinazione con l’ADI4, per gli encoder assoluti (SSI) il trasferimento dati
sincrono seriale deve operare nel formato di output: ”Ad abete” (TSSI).
(SINUMERIK 802D)
Encoder assoluti (SSI)
L’utilizzo di encoder assoluti (SSI) non è abilitato.
(SINUMERIK 840Di)
Encoder assoluti (SSI)
- L’utilizzo di encoder assoluti (SSI) a giro singolo non è abilitato.
- L’utilizzo di encoder assoluti (SSI) multigiro è abilitato.
Encoder lineare con tacche di zero / tacche di riferimento codificate in
base alla distanza
I seguenti encoder lineari con tacche di zero/di riferimento codificate in base alla
distanza sono abilitati per l’ADI4:
Ditta Heidenhain: LS 476 C
Ditta Heidenhain: LS 186 C,
in combinazione con un generatore elettronico di impulsi esterno (EXE): p. es.
IBV 610
Nota
Gli encoder con segnali SENO/COSENO (1 Vss) possono essere connessi tramite
un generatore elettronico di impulsi esterno (EXE), che converte i segnali al livello
di 5 V TTL.
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
2-19
Descrizione dei componenti hardware
2.2.7
Interfaccia (X6 - 1): Uscite digitali
Collegamento
Due connettori a 12 poli FKMCP 1,5/15-ST -3.81, produttore Phoenix (X6-1 e X6-2).
Configurazione dei pin
Tabella 2-10 Configurazione dei pin: interfaccia di uscita digitale (X6 -1)
Pin
Denominazione
1
P24EXT2
VI
tensione di alimentazione est. 24 V DC
2
Q0
DO
segnale di uscita digitale 1
3
Q1
DO
segnale di uscita digitale 2
4
Q2
DO
segnale di uscita digitale 3
5
Q3
DO
segnale di uscita digitale 4
6
DIR1
DO
segnale uscita digitale 5 o segnale direz. specifico per asse 1 3)
7
DIR2
DO
segnale uscita digitale 6 o segnale direz. specifico per asse 2 3)
8
DIR3
DO
segnale uscita digitale 7 o segnale direz. specifico per asse 3 3)
9
DIR4
DO
segnale uscita digitale 8 o segnale direz. specifico per asse 4 3)
RDY1
K
2)
segnale di ”pronto” contatto a relè 1
K
2)
segnale di ”pronto” contatto a relè 2
10
11
RDY2
12
MEXT2
Tipo1)
VI
Funzione
riferimento della tensione di alimentazione esterna
1) VI Voltage Input
DO Digital Output (24 V)
K contatto a relè
2) Carico max. di corrente: 2 A per
DC 150 V o AC 125 V;
N. max. di cicli di commutazione:
- DC 24 V, 1 A: 107
- 24 V DC, 2 A: 105
3) Per la funzione ”Mandrino unipo
lare”j (opp. motore unipolare)
Pin 1
X6-1
Numero dei pin:
ADI4
Tensione di alimentazione est.
stabilizzata +24 V
+24 V
0V
1 (P24EXT2)
Optoisolatore
2
Relè
Driver
Driver
3
:
:
:
:
:
:
:
:
9
Driver
Relè
10
Segnale:
”Ready”
11
12 (MEXT2)
M
2-20
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Descrizione dei componenti hardware
(SINUMERIK 802D)
Sull’unità ADI4 in combinazione con il controllo SINUMERIK 802D, i segnali dei pin
2 ... 9 non sono disponibili.
Tensione di alimentazione
Per l’alimentazione delle uscite digitali è necessario connettere a X6-1, pin 1
(P24EXT2), un alimentatore esterno 24 V DC.
La terra di riferimento dell’alimentatore esterno deve essere collegata a X6-1, pin
15 (MEXT2).
Per altri dati vedere il capitolo 2.8 (pagina 2-31).
Specifiche elettriche
Tabella 2-11 Specifica elettrica delle uscite digitali
Uscite digitali
min.
tip.
max.
nominale
VCC - 3 V
1)
VCC
24 V
Corrente di uscita IOUT
-
-
500 mA
-
Tensione con livello basso (low) (UL)
-
-
-
0V
Corrente di dispersione con livello
basso (low)
-
50 mA
400 mA
-
Ritardo del segnale TPHL, TPLH 2)
-
0,5 ms
-
-
Tensione con livello alto (high) (UH)
Tensione di alimentazione delle uscite dig.
1) tensione di uscita tipica:
VCC - IOUT<RON - 0,65 V
VCC:
tensione di esercizio effettiva P24EXT2
Corrente di uscita max. IOUT:
500 mA
Tensione di cortocircuito max.: 4 A (max. 100ms, VCC= 24 V)
Resistenza interna RON:
0,4W
2) In aggiunta va considerato il tempo di comunicazione di PROFIBUS e il tempo del
ciclo applicativo.
L’inversione della polarità non comporta né un livello alto (high), né la distruzione delle uscite.
Caratteristiche elettriche generali
Separazione galvanica tramite optoisolatori
Limitazione di corrente a max. 500mA
Protezione da: cortocircuito, surriscaldamento e perdita verso massa
Disinserzione automatica in caso di tensione minima
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
2-21
Descrizione dei componenti hardware
Contatto a relè: segnale di pronto ”Ready”
Il contatto a relè resta/viene aperto quando l’unità si trova in uno dei seguenti stati:
- inizializzazione dell’unità dopo Power On
- guasto dell’alimentazione o interrupt dell’hardware (NMI)
- assenza della comunicazione ciclica con il master DP
- errore PLL (Phase Locked Loop)
- errore di sincronizzazione
- surriscaldamento
Il contatto a relè viene chiuso in presenza delle seguenti due condizioni:
- stato dell’unità “Ready”
- presenza della comunicazione ciclica con il master DP
Cavo di collegamento
L’utente deve provvedere ai cavi di collegamento richiesti.
tensione di alimentazione X6-1, pin 1 e 12 (P24EXT2):
cavo, sezione del conduttore 1,5 mm2 (AWG16)
uscute digitali X6-1, pin 2 ... 9:
cavo, sezione del conduttore 0,5 - 1,5 mm2 (AWG20 - AWG16)
ready X6-2, pin 10 e 11:
cavo, sezione del conduttore 1,5 - 3,5 mm2 (AWG16 -AWG12)
Attenzione
La lunghezza massima dei cavi di segnale digitali è di 30 m.
2-22
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Descrizione dei componenti hardware
2.2.8
Interfaccia (X6 - 2): Ingressi digitali
Collegamento
Due connettori a 12 poli FKMCP 1,5/15-ST -3.81, produttore Phoenix (X6-1 e X6-1).
Configurazione dei pin
Tabella 2-12 Configurazione dei pin: interfaccia di ingresso digitale (X6 -2)
Pin
Denominazione
qualsiasi1)
Funzione
1
P24OUT
VI
Tensione di alimentazione 24 V DC
2
BERO1
DI
Segnale di ingresso BERO/tacca di zero esterna 1
3
BERO2
DI
Segnale di ingresso BERO/tacca di zero esterna 2
4
BERO3
DI
Segnale di ingresso BERO/tacca di zero esterna 3
5
BERO4
DI
Segnale di ingresso BERO/tacca di zero esterna 4
6
MEPU1
DI
Segnale misura tastatore 1 (v. tastatore di misura, pag. 2-25)
7
MEPU2
DI
Segnale misura tastatore 2 (v. tastatore di misura, pag. 2-25)
8
DRV1_RDY
DI
Segnale di pronto ”Drive Ready” asse 1
9
DRV2_RDY
DI
Segnale di pronto ”Drive Ready” asse 2
10
DRV3_RDY
DI
Segnale di pronto ”Drive Ready” asse 3
11
DRV4_RDY
DI
Segnale di pronto ”Drive Ready” asse 4
12
MOUT
VI
Riferimento della tensione di alimentazione
1) VI Voltage Input
DI Digital Input (24 V)
ADI4
Pin 1
P24OUT
X6-2
Numero dei pin:
1
(+24 V DC)
1
Optoisolatore
2
3
:
:
:
:
11
:
:
:
:
2
12
0V
+24 V
P24OUText
Tensione di alimentazione est.
stabilizzata +24 V
M
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
2-23
Descrizione dei componenti hardware
1
Collegamento in caso di impiego della tensione di alimentazione interna
P24OUT; il collegamento con
2
2
viene meno.
Collegamento in caso di impiego di una tensione di alimentazione esterna
P24OUText; il collegamento conforme a
1
viene meno.
(SINUMERIK 802D)
Sull’unità ADI4 in combinazione con il controllo SINUMERIK 802D, il segnale del
pin 7 non è disponibile.
Tensione di alimentazione interna P24OUT
Specifica della tensione di alimentazione interna P24OUT disponibile per gli
ingressi digitali su X6-2, pin 1:
Tabella 2-13 Specifica della tensione di alimentazione P24OUT
Tensione
minima
20,4 V
nominale
24 V
massima
28,8 V
Ondulazione
massima
3,6 Vss
Carico di corrente
tipica
0,1A
massima
1A
Assorbimento di potenza
tipica
3,02W
massima
30,2 W
Classe d’isolamento
A, secondo DIN 57110b
Tensione di uscita tipica:
VCC:
Corrente di uscita max.IOUT:
Resistenza interna RON:
La tensione di alimentazione P24OUT è a prova di cortocircuito
VCC - IOUT<RON - 0,65 V
tensione di esercizio effettiva P24OUT
1A
0,4 W
Tensione di alimentazione esterna P24OUText
Se si utilizza una tensione di alimentazione esterna, la relativa terra di riferimento
deve essere collegata a X6-2, pin 12 (M).
X6-2, pin 1 (P24OUT) resterà aperto.
2-24
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Descrizione dei componenti hardware
Specifiche elettriche
Tabella 2-14 Specifica elettrica delle uscite digitali
Ingressi digitali
min.
tip.
max.
nominale
Tensione con livello alto (high) (UH)
15 V
1)
30 V
24 V
3,7 mA
-
7,5 mA
-
-30 V
-
+5 V
0V
-
3 ms
-
-
Corrente in ingresso IINcon UH
Tensione con livello basso (low) (UL)
Ritardo del segnale TPHL, TPLH
2)
1) Vedere tabella 2-13 (pagina 2-24)
L’inversione della polarità non comporta né il livello alto (high), né la distruzione degli ingressi.
2) Vanno inoltre considerati il tempo di comunicazione di PROFIBUS e il tempo di
ciclo dell’applicazione.
Cavo di collegamento
L’utente deve provvedere ai cavi di collegamento richiesti.
Tensione di alimentazione X6-2, pin 1 (P24OUT), tensione di alimentazione
esterna P24OUText:
cavo, sezione del conduttore 1,5 mm2 (AWG16)
Ingressi digitali X6-2, pin 2 - 11:
cavo, sezione del conduttore 0,5 - 1,5 mm2 (AWG20 - AWG16)
Caratteristiche elettriche generali
Separazione galvanica tramite optoisolatori
Limitazione di corrente attiva degli ingressi
Protezione da tensione di ingresso negativa
Tastatore di misura
ADI4 supporta solo la misura su fronte positivo o negativo del tastatore di misura.
Una parametrizzazione per la misura contemporanea su fronte positivo e negativo
non è supportata.
2.2.9
Interfaccia (H1/H2): stato dell’unità
Lo stato dell’unità viene visualizzato tramite 4 LED di diagnostica sul lato anteriore
dell’unità stessa.
Tabella 2-15 LED di diagnostica (H1/H2)
Denominazione
H1
H2
Colore
Descrizione
POWER
verde
Tensione di alimentazione
OVTEMP
rosso
Visualizzazione di surriscaldamento in corso
EXCHANGE
verde
Scambio dati ciclico con il master DP in corso
READY
rosso
Pronto per lo scambio dati ciclico con il master DP
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
2-25
Descrizione dei componenti hardware
2.3
Montaggio in armadio
Montaggio
Per le correnti di interferenza ad alta frequenza, l’involucro dell’unità ADI4 deve
disporre di un collegamento a bassa impedenza alla parete posteriore dell’armadio;
anche l’armadio, a sua volta, deve essere collegato a bassa impedenza con i
motori/la macchina. A questo scopo è consigliabile montare l’unità su una parete di
montaggio non verniciata. La parete di montaggio, a sua volta, deve possedere un
collegamento conduttore con ampia superficie di contatto con i motori/la macchina.
Le pareti di armadi elettrici verniciate e le guide profilate, o simili mezzi di montaggio con superficie di contatto ridotta, non rispondono a questi requisiti.
Posa dei cavi
I cavi di potenza e i cavi di segnale devono essere sempre posati separatamente.
È opportuno che tutti i i cavi di segnale delle interfacce I/O (X6-1 / X6-2) siano
posati insieme. I fili singoli con segnali comuni vanno intrecciati La disposizione
ideale dei cablaggi prevede che i cavi dei segnali siano separati da quelli degli
encoder.
Tutti i cavi e i conduttori contenuti nell’armadio di comando vanno di norma disposti
il più vicino possibile alle pareti dello stesso; la posa libera dei cavi per lunghi tratti
all’interno dell’armadio può dare luogo a interferenze (effetto antenna). La vicinanza di fonti di interferenza (contattore, trasformatore, ecc.) deve essere evitata;
in determinati casi può essere necessario adottare una schermatura per separare il
cavo dalla fonte del disturbo. Occorre evitare anche l’uso di prolunghe dei cavi
ottenute mediante morsetti o simili. Per proteggere i cavi di segnale dalle interferenze di sorgenti estranee, gli stessi devono essere schermati.
Pericolo
!
2.4
L’unità è progettata per funzionare in un armadio chiuso. Non è ammesso l’uso al
di fuori di un armadio chiuso.
Alimentazione
Unità ADI4
Per alimentare (+24 V DC) l’unità ADI4 è necessaria una fonte di alimentazione
esterna. Il collegamento all’alimentazione ha luogo attraverso la connessione X1
(P24EXT1) sul frontalino dell’unità ADI4. Vedere il capitolo 2.2 (pagina 2-12).
2-26
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Descrizione dei componenti hardware
Uscite digitali
Per alimentare (+24 V DC) le uscite digitali è necessaria una fonte di alimentazione
esterna. Il collegamento all’alimentazione ha luogo attraverso la connessione
X6-1, pin 1 (P24EXT2). Vedere il capitolo 2.2 (pagina 2-12).
Ingressi digitali
Se per l’alimentazione degli ingressi digitali non viene utilizzata la tensione di
alimentazione interna di X6-2, pin 1 (P24OUT), è possibile impiegare una fonte di
alimentazione esterna (+24 V DC, max. 1 A).
In tale caso, la terra di riferimento (M) dell’alimentazione esterna deve essere collegata a X6-2, pin 12. X6-2, Pin 1 (P24OUT) resterà aperto.
Specifica delle tensioni di alimentazione (+24 V DC)
Le tensioni di alimentazione esterne per l’unità ADI4, le uscite digitali e, in opzione,
gli ingressi digitali devono essere conformi alle specifiche riportate nella tabella
2-7.
Tabella 2-16 Specifica delle tensioni di alimentazione esterne
Tensione di alimentazione 1)
P24EXT1
P24EXT2
P24OUText
Tensione
minima
18,5 V
nominale
24 V
massima
30,2 V
Ondulazione
massima
3,6 Vss
Carico di corrente
tipica
massima
0,5A
-
0,1A
1A
8A
1A
12W
-
3,02W
30,2W
241,6W
30,2W
Assorbimento di potenza
tipica
massima
1) P24EXT1:
tensione di alimentazione dell’unità ADI4
P24EXT2:
tensione di alimentazione per le uscite digitali
P24OUText: tensione di alimentazione opzionale per gli ingressi digitali
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
2-27
Descrizione dei componenti hardware
Precauzione
Le tensioni di alimentazione esterne devono essere generate come bassissima
tensione funzionale con separazione elettrica sicura (DIN EN 60204-1, cap. 6.4,
PELV).
Sul lato unità le tensioni di alimentazione P24EXT1 e P24EXT2 sono protette da:
Sovratensione
cortocircuito (limitazione di corrente elettr. delle uscite)
Inversione di polarità
sovraccarico
- P24EXT1: fusibile 2,5 A/250 V
- P24EXT2: fusibile 8 A/125 V
2.5
Messa a terra
Il montaggio dell’unità deve avvenire conformemente alla norma EN 60204.
L’utente deve mettere a terra le tensioni di alimentazione. A questo scopo occorre
realizzare, dalla connessione X1, pin 2 (MEXT1) o X6-1, pin 15 (MEXT2), un
collegamento a un punto terra centrale del sistema.
Se non è possibile un collegamento metallico durevole con ampia superficie di contatto al punto terra centrale attraverso la parete posteriore, l’unità dovrà essere
connessa mediante un cavo (sezione >10 mm2) alla sbarra di terra.
!
2-28
Precauzione
È necessario il collegamento di un conduttore di protezione. Per il collegamento
del conduttore di protezione è prevista una vite M6 sul lato frontale dell’involucro,
in basso a destra. Vedere il capitolo 2.1 (pagina 2-11).
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Descrizione dei componenti hardware
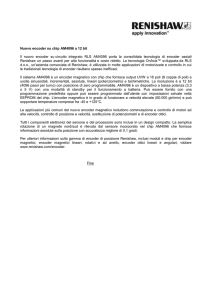
2.6
Panoramica dei collegamenti
N. di ordinazione
cavi confezionati
ADI4
Connettore:
MSTB 2,5/3- ST- 5.08, ditta Phoenix
Cavo:
a conduttore (1,0 ... 2,5 mm2)
X1
Alimentazione
esterna 24V DC
Connettore:
6ES7 972- 0BA41- 0XA0
6ES7 972- 0BB41- 0XA0
6ES7 972- 0BA12- 0XA0
6ES7 972- 0BB12- 0XA0
Cavo:
6XV1 830- 0EH10
6XV1 830- 3EH10
X2
PROFIBUS DP
Connessioni per encoder 1...4
X3
Uscita analogica
asse 1 - 4
6FX2 002- 3AD01- 10
v35 m
Alimentazione est.
24 V DC
Controllore, ad es.
- SINUMERIK 802D
- SINUMERIK 840Di
- SIMOTION
- CPU in tecnologia SIMATIC
SIMODRIVE 611
analogico
4 valori di riferimento
X4-1
6FX8 002- 2CD01- 10 (5 V)
6FX5 002- 2CD24- 10 (24 V)
1)
Encoder incrementale con
RS422 (TTL) (5V o 24V)
6FX2001-2...
6FX8 002- 2CC11- 10
1)
Encoder assoluto
con SSI
6FX2 001-5...
6FX8 002- 2CE02- 10
v 35 m
Encoder
ROD320
nel motore 1FT5
X4-2
X5-1
X5-2
X6-1
Uscite digitali
X6-2
Ingressi digitali
Alimentazione est.
24 V DC
Connettore:
FK- MCP 1,5/15- ST- 3.81, ditta Phoenix
Cavo:
a conduttore (0,14 ... 2,5 mm2)
v 30m
Sensori 1...n
Attuatori 1...n
1) Lunghezze max. dei cavi: vedere il capitolo 2.2, pag. 2-12
Figura 2-2
Panoramica dei collegamenti ADI4
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
2-29
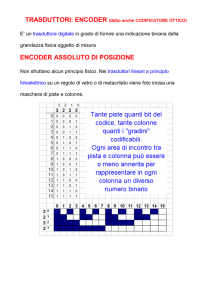
Descrizione dei componenti hardware
Disegno quotato
Ğ13
23.25
6.5
360
374
3.2
80 1)
2.7
1)
Spazio necessario per una ventilazione
80 1)
sufficiente
163.6
6.5
48.5
Coppia max. di serraggio per tutte le viti: 0,8 Nm
Figura 2-3 Disegno quotato: ADI4
2-30
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Descrizione dei componenti hardware
2.8
Dati tecnici
Tabella 2-17 Dati tecnici dell’unità modulare ADI4
Sicurezza
Grado di protezione
IP 20
Classe di protezione
classe di protezione I a norma VDE 0106 T1: 1982 (IEC 536);
resistenza ai corpi estranei e all’acqua a norma IEC 529
Omologazioni
UL/CSA, CE
Assorbimento di potenza
Carico nominale
12 W
massimo
30,2 W
Dati meccanici
Dimensioni LxAxP [mm]
154,4 x 325 x 48,5
Peso
circa 1,5 kg
Condizioni ambientali climatiche
Raffreddamento
Passaggio dell’aria di raffreddamento
Esercizio
Magazzinaggio/trasporto
0 ... 55 °C
-20 ... 55 °C/-40 ... 70 °C
5 ... 95 %
senza condensa
5 ... 95 %
senza condensa
al minuto
all’ora
Limiti di temperatura
Valori limite per umidità relativa
Rugiada
Pressione d’aria
non consentita
700 ... 1060 hPa
700 ... 1060 hPa
-
-1000 ... 3000 m
Altitudine durante il trasporto
Sollecitazione da urto durante il trasporto
Caduta libera nell’imballaggio da
trasporto
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
v1000 mm
2-31
Descrizione dei componenti hardware
2-32
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3
Attenzione
Per l’utilizzo di uno slave DP ADI4 sul PROFIBUSDP occorre osservare le
seguenti condizioni:
3.1
Uno slave DP ADI4 non è uno slave DP normalizzato e certificato secondo il
profilo PROFIDrive. Ad es., uno slave DP ADI4 non consente la comunicazione
aciclica. Lo slave DP ADI4 può funzionare perciò solo con un master DP
abilitato allo scopo.
Lo slave DP ADI4 può funzionare solo con un PROFIBUSDP equidistante.
Il ciclo DP minimo è di 1 ms.
Requisiti (SINUMERIK 802D)
Per parametrizzare uno slave DP ADI4 sono necessari i seguenti componenti:
software di sistema di SINUMERIK 802D: versione 02.01.05 o superiore
Per parametrizzare il SINUMERIK 802D sono disponibili nel toolbox dello stesso
differenti configurazioni di bus preconfigurate (SDB).
Dopo aver attivato la corrispondente configurazione con il dato macchina:
DM 11240: PROFIBUS_SDB_NUMBER
la parametrizzazione dello slave DP ADI4 è conclusa.
3.2
Requisiti (SINUMERIK 840Di)
Per parametrizzare l’NC (azionamento) o il relativo slave DP ADI4 sono necessari i
seguenti componenti:
Bibliografia: /HBI/ Manuale SINUMERIK 840Di
SIMATIC STEP7 a partire dalla versione 5, ServicePack 2
SlaveOM (Slave Object Manager) per SINUMERIK 840Di dalla versione 5.1.1
oppure Drive ES Basic dalla versione 5.1
SlaveOM
Lo SlaveOM per SINUMERIK 840Di consente la parametrizzazione basata su finestre di dialogo degli azionamenti SIMODRIVE e dell’unità ADI4 nell’ambito della
creazione della configurazione con SIMATIC STEP 7 Config HW.
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-33
Parametrizzazione
Object Manager SlaveOM per SINUMERIK 840Di fa parte dell’installazione di
SINUMERIK 840Di.
Drive ES Basic
Drive ES Basic consente la parametrizzazione basata su finestre di dialogo degli
azionamenti SIMODRIVE e dell’unità ADI4. Inoltre con Drive ES Basic è possibile
parametrizzare altri sistemi di azionamento riguardanti SINUMERIK 840Di.
Drive ES Basic si acquista come opzione.
Nota
3.3
Se su un SIMATIC S7 con Drive ES Basic installato si installa
successivamente SlaveOM per SINUMERIK 840Di, la sua funzionalità si riduce
al set di funzioni di SlaveOM.
Se si utilizza lo SlaveOM per SINUMERIK 840Di in combinazione con CPU di
altri PLC, nella fase di compilazione della configurazione viene segnalato un
errore di coerenza e non viene generato alcun blocco dati di sistema.
Requisiti (SIMOTION)
Per parametrizzare uno slave DP ADI4 sono necessari i seguenti componenti:
3.4
ADI4: dal n. di ordinazione (MLFB): 6FC5 211-0BA01-0AA1
versione firmware 01.02.02 o superiore
SIMATIC STEP7 dalla versione 5.1
SIMOTION
- SIMOTION P o C:
da SIMOTION V2.1 (SCOUT e Runtime)
- SIMOTION D:
da SIMOTION V3.1 (SCOUT e Runtime)
Requisiti (CPU in tecnologia SIMATIC)
Per parametrizzare uno slave DP ADI4 sono necessari i seguenti componenti:
3-34
ADI4: da (MLFB) 6FC5 211-0BA01-0AA1
versione firmware 01.02.02 o superiore
CPU 317T 2DP a partire da (MLFB) 6ES7 317-6TJ10 -0AB0, V2.1.0/V3.0.1
SIMATIC STEP7 a partire dalla versione 5.3, ServicePack 1
S7-Technology dalla versione 2.0
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3.5
3.5.1
Parametrizzazione di PROFIBUS DP
Sequenza di parametrizzazione
La parametrizzazione di PROFIBUS DP per quanto concerne lo slave DP ADI4 ha
luogo in due fasi fondamentali:
1. La prima fase, una volta inserito nella configurazione lo slave DP ADI4, consiste nella parametrizzazione specifica per lo slave di:
- parametri PROFIBUS (vedere capitolo 3.6, pag. 3-37)
- parametri di funzione (vedere capitolo 3.9, pag. 3-44)
La fase 1 deve essere eseguita per prima per tutti gli slave DP ADI4 necessari
alla configurazione.
2. La seconda fase consiste nella parametrizzazione della comunicazione DP
ciclica equidistante (vedere cap. 3.10, pag. 3-56).
La fase 2 può essere eseguita successivamente su qualsiasi slave DP ADI4.
Le impostazioni effettuate possono essere trasferite mediante la funzione di
sincronizzazione dello SlaveOM a tutti gli altri slave DP ADI4.
3.5.2
Inserimento di uno slave DP ADI4 nella configurazione
Per inserire uno slave DP ADI4 nella configurazione, aprire il catalogo hardware
con il comando di menu Visualizza > Catalogo.
Lo slave DP ADI4 si trova sotto:
Profilo: Standard
PROFIBUS -DP > SINUMERIK > ADI4
(CPU della tecnologia SIMATIC)
Se per la CPU di tecnologia si è installato S7-Technology, lo slave DP ADI4 si
trova in:
Profilo: SIMATIC Technology -CPU
PROFIBUS -DP(DRIVE) > Altre APPARECCHIATURE DA CAMPO >
SINUMERIK > ADI4
Fare clic con il pulsante sinistro del mouse sullo slave DP ADI4 per selezionarlo e
trascinarlo sul sistema master DP nella finestra di stazione.
Il sistema master DP è rappresentato nella finestra di stazione con il simbolo
seguente:
Lo slave DP ADI4 viene inserito nella configurazione rilasciando il pulsante sinistro
del mouse.
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-35
Parametrizzazione
Nota
Durante il trascinamento dello slave DP, il cursore assume la forma di cerchio
tratteggiato. Se il cursore viene posizionato esattamente sul sistema master DP,
assume il segno più (+) e lo slave DP può essere inserito nella configurazione.
3-36
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3.6
Parametri PROFIBUS (SINUMERIK 802D)
I parametri PROFIBUS sono già impostati nella configurazione predefinita e non
possono essere modificati. I valori dei parametri di PROFIBUS sono descritti in:
Bibliografia
SINUMERIK 802D Toolbox > Readme: ADI4_SDB.PDF
3.7
Parametri PROFIBUS (SINUMERIK 840Di), (SIMOTION) e
(CPU in tecnologia SIMATIC)
I parametri PROFIBUS comprendono:
3.7.1
Indirizzo PROFIBUS
Numero degli assi e degli encoder (tipo telegramma)
Indirizzi I/O
Indirizzo PROFIBUS
Quando si inserisce uno slave DP ADI4 nella configurazione, si apre la finestra di
dialogo: ”Proprietà - Interfaccia PROFIBUS ADI4”, scheda: Parametri:
Proprietà - Interfaccia PROFIBUS ADI4
Generalità Parametri
Indirizzo:
velocità di trasmissione dati: 12 MBit/s
Subnet:
- - - non collegato in
rete - - -
Nuova...
Proprietà...
Elimina...
OK
Annulla
Help
Figura 3-1 Indirizzo PROFIBUS
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-37
Parametrizzazione
Il valore visualizzato alla voce Indirizzo è stato impostato automaticamente da
Config HW sul primo indirizzo PROFIBUS libero nell’ambito della configurazione.
Nota
La finestra di dialogo può anche essere richiamata in seguito. A questo scopo, in
Config HW fare doppio clic sull’icona dello slave DP ADI4; nella finestra di dialogo
che si visualizza, scheda ”Generale”, premere il pulsante ”PROFIBUS”.
Attenzione
In linea di principio, l’indirizzo PROFIBUS dello slave DP-Slave ADI4 può essere
impostato su un valore qualsiasi. Occorre però assicurarsi che l’indirizzo
PROFIBUS impostato in Config HW coincida con l’indirizzo PROFIBUS impostato
sullo slave DP ADI4 tramite microinterruttori:
Non avviene nessuna sincronizzazione automatica.
I seguenti dati devono coincidere:
1. Configurazione SIMATIC S7 slave DP ADI4
indirizzo PROFIBUS
2. Unità ADI4, interruttore DP S2
indirizzo PROFIBUS
Dopo la conferma della finestra di dialogo con il pulsante ”OK”, si apre la finestra di
dialogo ”Proprietà slave DP”. Proseguire quindi con la parametrizzazione del tipo di
telegramma.
3-38
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3.7.2
Tipo di telegramma
Lo slave DP ADI4 funziona con un tipo di telegramma specifico:
- 4 assi con rispettivamente un encoder (telegramma standard 3) e dati di I/O
Proprietà dello slave DP
Generalità Configurazione
Sincronizzazione di
clock
Encoder
nessuna
nessuna
4 assi con rispettivamente un encoder, telegramma standard 3 + EA, PZD- 5/9 A/E
Tipo1/1
Indirizzo
Tipo
PR...
Indirizzo I/O
Pro...
Lu...
Slot
4
nessun
PKW
5
Inserisci slot
Configurazione
masterMaster:slave
Stazione:
Elimina slot
1
(2) DP(DRIVE)
SIMATIC 300(1)
Commento:
OK
Annulla
Help
Figura 3-2 Tipo telegramma
Nell’impostazione standard non è selezionato alcun tipo di telegramma.
Il tipo di telegramma specifico per ADI4 deve essere selezionato esplicitamente
nella scheda “Configurazione”.
Finestra di dialogo
Finestra di dialogo: ”Proprietà dello slave DP”
Scheda: ”Configurazione”
Casella di riepilogo: ”Preassegnazione”
4 assi con rispettivamente un encoder, telegramma
standard 3 e EA, PZD-5/9 A/E 1/1
OK
Struttura dei telegrammi
Il telegramma è strutturato come segue:
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-39
Parametrizzazione
Tabella 3-1
Struttura del telegramma
Tipo telegramma
Descrizione
4 assi con rispettivamente un encoder, telegramma standard 3 + EA, PZD-5/9 A/E 1/1
4 telegrammi standard 3 e rispettivamente una
parola PZD per i dati di I/O digitali
PZD x/y numero delle parole dei dati di processo, x: valore di riferimento, y: Valore attuale
ad es. PZD-5/9:
5 parole dei dati di processo per i valori di riferimento
9 parole dei dati di processo per i valori attuali
Struttura del telegramma ADI4
Asse1
Asse2
Asse3
Asse4
I/O
STD 3
STD 3
STD 3
STD 3
Parola di O
Low Asse1
Asse2
Asse3
Asse4
I/O
STD 3
STD 3
STD 3
STD 3
Parola di I
Valori riferimento (master > slave)
High
Valori attuali (slave > master)
STD 3: Telegramma standard 3 secondo PROFIDrive V3.0
Parola di O: dati di uscita digitali (16 bit)
Parola di I: dati di ingresso digitali (16 bit)
Telegramma standard 3: interfaccia valore di riferimento della velocità a 32 bit con 1 encoder
PZD1
PZD2
NSOLL_B
STW1
Low
PZD3
PZD4
STW2
PZD5
Valore riferimento (master > slave)
G1_STW
High
PZD1
PZD2
ZSW1
PZD3
NIST_B
PZD4
PZD5
ZSW2
G1_ZSW
PZD8
PZD9
G1_XIST2
PZD6
PZD7
G1_XIST1
Valore attuale (slave > master)
Parola di O (dati di uscita dig. 16bit)
Byte superiore
15
12 11
Byte inferiore
8 7
4 3
Modo conforme 611U
Selezione: ricerca del punto di riferimento
mediante segnale esterno della tacca di zero
1-4
Non utilizzato
0
Uscita digitale 1-4 -> X6-1: pin 2-5
Uscita digitale 5-8 / segnale di direz.
1-4 per mandrino unipolare - > X6-1: pin 6-9
Parola di I (dati di ingresso dig. 16bit)
Byte superiore
15 14 13 12 11
Byte inferiore
8 7
2 1
0
Ingresso digitale 9-10/Drv_Rdy 3-4
-> X6-2: pin 10-11
Non utilizzato
Ingresso digitale 1-4/tacca di zero est. 1-4
-> X6-2: pin 2-5
Ingresso digitale 5-6/tastatore di misura 1-2
-> X6-2: pin 6-7
Ingresso digitale 7-8/Drv_Rdy 1-2
-> X6-2: pin 8-9
3-40
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
Attenzione
Il tipo di telegramma dello slave DP ADI4 impostato in Config HW deve
corrispondere al tipo di telegramma impostato nel controllore.
Non avviene nessuna sincronizzazione automatica.
Parola di comando encoder Gx_STW
Descrizione della parola di controllo encoder (estratto) relativa a:
Tabella 3-2
Ricerca della tacca di riferimento
Misura al volo
Errore encoder
Parola di comando encoder Gx_STW (estratto)
Nome
Bit
Stato del segnale, descrizione
Bit 7 = 0 => Requisito: Ricerca della tacca di riferimento
Bit
0
1
2
3
0
Significato
Funzione 1:
Funzione 2:
Funzione 3:
Funzione 4:
Ricerca del punto di riferimento mediante:
tacca di zero dell’encoder (tranne ”Modo conforme 611U”)
fronte di salita della tacca di zero esterna
fronte di discesa della tacca di zero esterna
non utilizzata
Bit 7 = 1 => Requisito: Misura al volo
Bit
0
1
2
3
1
Significato
Funzione 1
Funzione 2
Funzione 3
Funzione 4
tastatore di misura 1 fronte di salita
tastatore di misura 1 fronte di discesa
tastatore di misura 2 fronte di salita
tastatore di misura 2 fronte di discesa
Nota
2
Ricerca
della
tacca di
riferimento
Funzioni
Bit x = 1
Funzione richiesta
Funzione non richiesta
Bit x = 0
Se viene attivata più di una funzione, i valori di tutte le funzioni possono
essere letti solo quando tutte le stesse sono state concluse e dopo che
ciò è stato segnalato attraverso il relativo bit di stato (G1_ZSW, bit0 bit3 = 0).
opp.
Misura al volo
Misura al
volo
È possibile attivare contemporaneamente il fronte di salita e il fronte di
discesa del tastatore di misura. Il segnale del tastatore di misura viene
riconosciuto in base alla direzione della modifica del segnale. I valori di
misura vengono letti in successione.
Nota
3
ADI4 supporta solo la misura su fronte positivo o negativo.
Bit 6, 5, 4
4
5
Comando
6
7
Modo
Significato
000
- - -
001
Attivare la funzione x
010
Leggere il valore x
011
Interrompere la funzione x
0
Ricerca della tacca di riferimento
1
Misura al volo
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-41
Parametrizzazione
Tabella 3-2
Bit
15
Parola di comando encoder, seguito Gx_STW (estratto)
Nome
Errore encoder
Stato del segnale, descrizione
0
Nessun errore
1
E’ presente un errore dell’encoder; codice errore in Gx_XIST2
Valore attuale encoder aggiuntivo Gx_XIST2
Codici errore in Gx_XIST2 con G1_ZSW, bit15 == 1
Tabella 3-3
Codice di errore in Gx_XIST2
Significato
G1_XIST
2
Possibili cause/descrizione
1Esa
Errore cumulativo dell’encoder
I livelli dei segnali dell’encoder sono insufficienti, disturbati
(schermatura inaccessibile) oppure si attivata la sorveglianza
della rottura del cavo.
2Esa
Sorveglianza della tacca
di zero
Tra 2 tacche di zero dell’encoder si è verificata una variazione
della posizione del rotore misurata (eventuale perdita di tacche
encoder).
3.7.3
Indirizzi di I/O
Per la comunicazione tra il controllo e i singoli assi di uno slave DP ADI4 è necessario che gli indirizzi I/O del valore di riferimento e del valore attuale di un asse
siano uguali.
Questo requisito viene considerato automaticamente da Config HW quando uno
slave DP ADI4 viene inserito nella configurazione.
Finestra di dialogo
Finestra di dialogo: ”Proprietà dello slave DP”
Scheda: ”Configurazione”
Nodi/partner PROFIBUS, ind. I/O: <Indirizzo I/O>
OK
Attenzione
Gli indirizzi I/O per il valore di riferimento e il valore attuale di un asse devono
essere uguali.
Indirizzo di ingresso (valore attuale) = indirizzo di uscita (valore di rif.)
3-42
Se uno slave DP ADI4 viene inserito in un progetto S7 mediante un processo
di copia (ad es. da un altro progetto S7), l’indirizzo I/O viene attribuito
esclusivamente da ”Config HW”. In questo modo può verificarsi che per un
asse esistano indirizzi I/O diversi per il valore di riferimento e per il valore
attuale. In questo caso, gli indirizzi I/O devono essere corretti a mano.
Per evitare conflitti di accesso tra gli azionam. PROFIBUSDP e le unità di periferia, devono essere utilizz. come indirizzi I/O dello slave DP ADI4 val. w272.
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3.7.4
Coerenza
L’impostazione di default in relazione alla coerenza dei dati di I/O è:
- Lunghezza totale
L’impostazione della coerenza su ”lunghezza totale” comporta che il sistema operativo del PLC non consente l’accesso diretto a quest’area di indirizzamento dal
programma utente del PLC (ad es. byte, parola o parola doppia).
3.8
Parametri di funzione (SINUMERIK 802D)
I parametri di funzione sono già impostati nella configurazione predefinita e non
possono essere modificati.
Sono impostati i seguenti parametri:
tipo di encoder:
TTL
mandrino unipolare:
”non attivo”
rampa di shutdown
0
tempo di ritardo dello shutdown:
0
errori tollerabili della funzionalità vitale:
0
bit riservati per la risoluzione fine:
11
modo conforme 611U:
”attivo”
1)
1) Encoder incrementale (TTL) con trasmissione differenziale di segnali ad onda
quadra a 5V (standard RS 422).
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-43
Parametrizzazione
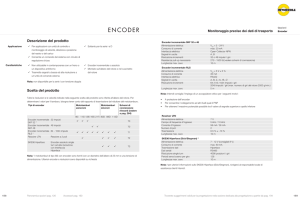
3.9
Parametri di funzione (SINUMERIK 840Di), (SIMOTION) e
(CPU in tecnologia SIMATIC)
Nella scheda: “Encoder” si impostano, oltre ai parametri dell’encoder, anche tutti gli
altri parametri di funzione dello slave DP ADI4:
Tipo di encoder
Mandrino unipolare (o motore unipolare)
Rampa di shutdown
Tempo di ritardo dello shutdown
Errori tollerabili di funzionalità vitale
Bit riservati per la risoluzione fine
Modo conforme 611U
La figura 3-3 mostra il relativo dialogo con esempi di valori per i diversi tipi di encoder e di parametri.
Proprietà dello slave DP
Generalità Configurazio
ne
Encoder 1
Tipo di encoder:
TTL
Sincronizzazione di clock
Encoder
Encoder 2
Encoder 3
Encoder 4
Tipo di encoder:
Tipo di encoder:
Tipo di encoder:
TTL
SSI
SSI
Parità
Risoluzion
e:
6000
Risoluzion
e:
6000
Risoluzion
e:
Lunghezza
msg:
Codifica:
Parità
Risoluzion
e:
Lunghezza
msg:
Codifica
2048
21
Binario
Baudrate:
187,5 Kbit/s
2
asse
3
21
Gray
Baudrate:
Mandrino
unipolare
1 asse
2048
187,5 Kbit/s
asse
4
asse
Rampa di shutdown [ms]:
1
Errore tollerabile della funzionalità vitale:
0
Tempo di ritardo dello shutdown [s]:
0
Bit riservati per la risoluzione fine:
11
Modo conforme 611U
OK
Annulla
Help
Figura 3-3 Finestra di dialogo: Proprietà dello slave DP, scheda: Encoder
3-44
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3.9.1
Tipo di encoder
Tipo di encoder: “non presente”
Il tipo di encoder ”non presente” per l’encoder x significa che l’asse x non è presente o che non deve funzionare. Nel telegramma PROFIBUS vengono trasferiti
per questo asse dati utili vuoti.
Tipo di encoder: TTL
Parametri dell’encoder:
Risoluzione
Risoluzione dell’encoder in incrementi per rotazione dell’encoder
Nota
Nei mandrini con encoder a bassa risoluzione può verificarsi un andamento non
lineare (reticolo) del valore attuale nella visualizzazione. Il reticolo visibile nella
visualizzazione del valore attuale è il risultato della risoluzione della velocità (RR)
per:
RR = 60000 / ( Tdp * ER * PM )
RR (risoluzione della velocità):
Tdp (clock del regolatore di posizione = clock PROFIBUS):
ER (risoluzione encoder):
PM (moltiplicazione impulso)
[ ( giri/min ) / impulso encoder ]
[ ms ]
[ impulsi encoder / giro ]
Esempio:
- Tdp (clock regolatore di posizione = clock PROFIBUS):
- ER (risoluzione encoder):
- PM (moltiplicazione impulso interna ADI4):
2ms
2500 impulsi / giro
4
RR = 60000 / ( 2 * 2500 * 4 ) = 3 ( giri / min ) / impulso encoder
(SINUMERIK 840Di)
Spianamento del valore attuale per encoder a bassa risoluzione tramite il dato
macchina:
DM34990 $MA_ENC_ACTVAL_SMOOTH_TIME (costante tempo di spianamento)
Tipo di encoder: SSI
Parametri dell’encoder:
Parità
Questa casella di opzione deve essere selezionata se il trasferimento dei dati
dell’encoder dall’encoder all’ADI4 avviene con bit di parità.
Risoluzione
Risoluzione dell’encoder in incrementi per rotazione dell’encoder
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-45
Parametrizzazione
Lunghezza msg.
Numero dei bit di dati utili inviati dall’encoder
Codifica
Vengono supportate le seguenti codifiche dell’encoder:
- Binario
- Gray
Baudrate
Vengono supportate le seguenti velocità di trasmissione:
- 187,5 Kbit/s
- 375 Kbit/s
- 750 Kbit/s
Attenzione
3.9.2
La velocità di trasmissione deve essere impostata nello stesso modo per tutti
gli encoder SSI. In caso di velocità di trasmissione diverse, viene utilizzata
quella dell’encoder SSI con il numero encoder più alto.
In combinazione con l’unità ADI4 si possono impiegare solo encoder assoluti
(SSI) con formato di output dei dati: ”Ad abete” (TSSI).
Mandrino unipolare (o motore unipolare)
L’azionamento può eseguire il movimento in due direzioni. Il campo di tensione
della tensione di uscita analogica si commuta mediante la casella di opzione ”Mandrino unipolare”.
Mandrino unipolare non selezionato
Se la casella di opzione “Mandrino unipolare” non è selezionata, come valore di
riferimento viene emessa una tensione analogica compresa tra -10V e +10V.
Mandrino unipolare selezionato
Se la casella di opzione “Mandrino unipolare” è selezionata, come valore di riferimento viene emessa una tensione analogica compresa tra 0V e +10V. Il senso di
rotazione viene emesso quindi dall’unità ADI4 in funzione del valore di riferimento
corrente della velocità attraverso un’uscita digitale della stessa unità ADI4:
- segnale del senso di rotazione per l’asse 1 -> uscita digitale X6-1, pin 6
- segnale di senso di rotazione per l’asse 2 -> uscita digitale X6-1, pin 7
- segnale di senso di rotazione per l’asse 3 -> uscita digitale X6-1, pin 8
- segnale di senso di rotazione per l’asse 4 -> uscita digitale X6-1, pin 9
(SIMOTION) e (CPU della tecnologia SIMATIC)
La funzione: Mandrino unipolare (o Motore unipolare) non è disponibile.
3-46
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
(SINUMERIK)
Livello di tensione dei segnali del senso di rotazione sull’uscita digitale X6-1, pin 6
- 9 con:
3.9.3
M3 (mandrino destro)
M3 (mandrino sinistro)
M3 (mandrino fermo)
= 24 V
=0V
=0V
Rampa di shutdown
Attraverso il parametro ”Rampa di shutdown” è possibile preimpostare una funzione lineare nel tempo secondo la quale, quando viene riconosciuto un errore
nell’unità ADI4, tutti gli azionamenti di ADI4 vengono frenati fino a raggiungere il
valore di riferimento 0.
Un valore del parametro pari a 0 provoca l’arresto immediato degli azionamenti
(frenatura al limite di corrente).
Unità: [ms]
Valore
di
riferimento max.
Valore di riferimento corrente
0
Valore di parametro:
Rampa di shutdown
t [ms]
Figura 3-4
Parametri: Rampa di shutdown
3.9.4
Tempo di ritardo dello shutdown
Attraverso il parametro ”Tempo di ritardo dello shutdown” è possibile preimpostare
un tempo in base al quale, dopo un allarme di temperatura verificatosi nell’unità
ADI4, tutti gli azionamenti di ADI4 vengono frenati fino a raggiungere il valore di
riferimento 0.
Allo scadere del ”Tempo di ritardo dello shutdown” viene considerata la ”Rampa di
shutdown”.
Unità: [s]
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-47
Parametrizzazione
3.9.5
Errori tollerabili di funzionalità vitale
Attraverso il parametro ”Errori tollerabili di funzionalità vitale” viene preimpostato il
numero degli errori tollerabili della funzionalità vitale del master DP. Nel caso di
superamento del numero parametrizzato, le interfacce del valore di riferimento
degli azionamenti vengono decrementate al valore 0 attraverso la ”Rampa di shutdown”.
Attenzione
Il parametro ”Errori tollerabili di funzionalità vitale” può essere per il momento
impostato solo sui valori da 0 a 13.
3.9.6
Bit riservati per la risoluzione fine
Attraverso il parametro ”Bit equivalenti supplementari per risoluzione fine” viene
indicata la moltiplicazione degli impulsi desiderata per gli incrementi encoder trasferiti nel valore attuale dell’encoder G1_XACT1 e G1_XACT2.
Il numero dei bit equivalenti supplementari per la risoluzione fine deve essere
impostato in modo fisso sul valore 11. Questo corrisponde ad una moltiplicazione
degli impulsi di: 211 = 2048.
Valore attuale encoder trasferito G1_XACT1 opp. G1_XACT2
31
Overflow
10
Incrementi encoder
correnti
0
Bit riservati per la risoluzione fine
Attenzione
Il parametro ”Bit riservati per la risoluzione fine” deve essere sempre impostato
su 11.
(SINUMERIK 840Di)
Attenzione
Conformemente al parametro “Bit equivalenti supplementari per risoluzione
fine”, nel dato macchina NC specifico per l’asse:
DM30260: $MA_ABS_INC_RATIO (rapporto tra risoluzione assoluta e
risoluzione incrementale)
deve essere inserito il valore: 2“Bit equivalenti supplementari per risoluzione fine” = 211 =
2048.
3-48
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3.9.7
Modo conforme 611U
Nel modo conforme 611U, la sorgente del segnale per la ricerca del punto di riferimento dell’asse (tacca di zero o segnale del BERO) non è più definita dal telegramma standard PROFIDrive (STD3, parola di comando dell’encoder G1_STW,
vedere pag. 3-41, bensì dalla parola di uscita digitale supplementare nel telegramma PROFIBUS di ADI4 (vedere tabella 3-1, pag. 3-40).
Modo conforme 611U:
non selezionato
La sorgente di segnale per la ricerca del punto di riferimento viene definita dalla
parola di comando encoder Gx_STW (vedere pagina 3-41) nel telegramma
standard PROFIDrive.
selezionato
La sorgente di segnale per la ricerca del punto di riferimento viene definita dalla
parola di uscita digitale supplementare nel telegramma PROFIBUS.
Parola di uscita digitale
Le sorgenti dei segnali per la ricerca del punto di riferimento dell’asse si selezionano asse per asse tramite i seguenti bit della parola di stato (vedere anche Parola
di O: tabella 3-1, pagina 3-40):
Tabella 3-4
Parola di uscita: Sorgenti dei segnali per la ricerca del punto di
riferimento
Bit
Va lore
0
0
Asse 1: tacca di zero da encoder 1 (X4 -1)
1
Asse 1: fronte di salita da tacca di zero esterna 1 (X6 -2, pin 2)
0
Asse 2: tacca di zero da encoder 2 (X4 -2)
1
Asse 2: fronte di salita da tacca di zero esterna 2 (X6 -2, pin 3)
0
Asse 3: tacca di zero da encoder 3 (X4 -3)
1
Asse 3: fronte di salita da tacca di zero esterna 3 (X6 -2, pin 4)
0
Asse 4: tacca di zero da encoder 4 (X4 -4)
1
Asse 4: fronte di salita da tacca di zero esterna 4 (X6 -2, pin 5)
1
2
3
Sorgenti dei segnali per la ricerca del punto di riferimento
Se per un asse che deve eseguire la ricerca del punto di riferimento è parametrizzato il modo conforme 611U, dal programma utente del PLC, prima della richiesta
della funzione “Ricerca della tacca di riferimento” nella parola di comando dell’encoder, deve essere impostato nella parola di uscita digitale dell’ADI4 il segnale
specifico dell’asse per la selezione della sorgente del segnale.
I capitoli da 3.9.8 a 3.9.10 illustrano la struttura di principio del sistema e le varie
condizioni per i singoli tipi di ricerca del punto di riferimento.
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-49
Parametrizzazione
(SIMOTION)
Con modo conforme 611U
Nella ricerca del punto di riferimento di un asse mediante tacca di zero dell’encoder e tacca di zero esterna, il corrispondente bit specifico dell’asse nella
parola digitale di uscita deve essere impostato su 0 (tacca di zero da encoder)
dal programma utente del PLC.
La sorgente del segnale per la ricerca del punto di riferimento può essere commutata durante l’esercizio.
Senza modo conforme 611U
La ricerca del punto di riferimento dell’asse avviene sempre sulla tacca di zero.
(CPU della tecnologia SIMATIC)
Versione S7-Technology 1.0
Il modo conforme 611U determina l’interconnessione di un bit nella parola di uscita
digitale (vedere la tabella 3-4). Nella CPU della tecnologia questo non si può fare
dal programma utente (vedere anche il capitolo 3.9.13, pagina 3-54). Per la ricerca
del punto di riferimento tramite:
Tacca di zero encoder
Tacca di zero encoder e camma di riferimento
ciò non ha alcuna conseguenza. Onde permettere la ricerca del punto di riferimento mediante tacca di zero esterna, è necessario impostare il bit di uscita corrispondente dell’asse tramite un oggetto tecnologico ”Camma”.
A partire dalla versione S7-Technology 2.0
Le possibilità per utilizzare il modo conforme 611U con la commutazione della sorgente del segnale sono le seguenti:
Utilizzare l’oggetto tecnologico Camma per la commutazione della sorgente del
segnale. Progettare a questo scopo una camma in S7TConfig, la cui uscita
punti all’indirizzo del bit corrispondente per la commutazione della sorgente del
segnale sull’asse corrispondente.
L’indirizzo della parola dati aggiuntiva nel telegrmma dell’ADI4 va inserito
nell’immagine della periferia DP(DRIVE). L’elaborazione avviene con le funzioni
tecnologiche ”MC_ReadPeriphery” e ”MC_WritePeriphery”. L’indirizzo della
parola dati va adattato manualmente all’unità in Config HW e deve rientrare nel
campo indirizzi 0...63 byte.
Finestra di dialogo: Fine
Chiudendo la finestra di dialogo ”Proprietà slave DP” con il pulsante ”OK”, i dati
vengono applicati.
Fase 1: Fine
Con ciò si conclude la fase 1 della parametrizzazione dello slave DP ADI4 (vedere
il capitolo 3.5.1, pagina 3-35).
3-50
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3.9.8
Ricerca del riferimento mediante tacca di zero dell’encoder
Struttura del sistema
ADI4
Controllore, ad es.
- SINUMERIK 802D
- SINUMERIK 840Di
- SIMOTION
- CPU in tecnologia SIMATIC
PROFIBUS DP
Sistema convertitore, ad es.
SIMODRIVE 611 con
modulo di regolazione con
interfaccia analogica valore di
riferimento
Valore di riferimento analogico
Valore attuale encoder/
Tacca di zero encoder
Motore ad es. 1FT6
Asse ad es. tavola
ÍÍÍÍÍÍÍÍ
Figura 3-5 Struttura di principio del sistema: Ricerca del riferimento mediante tacca di
zero dell’encoder
Funzione
Dopo che il controllore richiama la ricerca del punto di riferimento, con la successiva tacca di zero encoder riconosciuta, l’unità ADI4 trasmette al controllore il
valore attuale dell’encoder come posizione di riferimento.
Senza modo conforme 611U
Non sono necessarie ulteriori operazioni.
Con modo conforme 611U
Nella parola di uscita digitale, per l’asse per cui deve essere eseguita la ricerca del
punto di riferimento (ad es. asse 1) deve essere impostato il segnale corrispondente.
Parola di uscita digitale:
Bit 0:
= 0 => ”Asse 1: Tacca di zero da encoder 1 (X4-1)“
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-51
Parametrizzazione
3.9.9
Ricerca del riferimento mediante tacca di zero esterna
Struttura del sistema
ADI4
Controllore, ad es.
- SINUMERIK 802D
- SINUMERIK 840Di
- SIMOTION
- CPU in tecnologia SIMATIC
Sistema convertitore, ad es.
SIMODRIVE 611 con
modulo di regolazione con
interfaccia analogica valore di
riferimento
PROFIBUS DP
Valore di riferimento analogico
Ingressi digitali, ad es.
asse 1: (X6-2), pin 2
Valore attuale encoder
Segnale esterno
tacca di zero
Motore ad es. 1FT6
Asse ad es. tavola
ÏÏÏÏÍÍÍÍÍÍÍÍ
Tacca
di zero esterna
Figura 3-6 Struttura di principio del sistema: Ricerca del riferimento mediante tacca di
zero esterna
Funzione
Dopo che il controllore richiama la ricerca del punto di riferimento, con il successivo segnale di tacca di zero esterna, l’unità ADI4 trasmette al controllore il valore
attuale dell’encoder come posizione di riferimento.
Senza modo conforme 611U
Il controllo deve preimpostare la funzione corrispondente tramite la parola di
comando encoder G1_STW:
Funzione 2 (ricerca del punto di riferimento mediante fronte di salita della tacca
di zero esterna)
Funzione 3 (ricerca del punto di riferimento mediante fronte di discesa della
tacca di zero esterna)
Con modo conforme 611U
Nella parola di uscita digitale, per l’asse per cui deve essere eseguita la ricerca del
punto di riferimento (ad es. asse 1) deve essere impostato il segnale corrispondente.
Parola di uscita digitale:
Bit 0:
= 1 => ”Asse 1: fronte di salita da tacca di zero esterna 1
(X6-2, pin 2)”
(SINUMERIK) (SIMOTION)
Per la ricerca del punto di riferimento mediante tacca di zero esterna deve essere
selezionato il modo conforme 611U.
3-52
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3.9.10
Ricerca del punto di riferimento mediante tacca di zero encoder e
camme di riferimento (SIMOTION)
Struttura del sistema
ADI4
Controllore, ad es.
- SINUMERIK 802D
- SINUMERIK 840Di
- SIMOTION
- CPU in tecnologia SIMATIC
PROFIBUS DP
Sistema convertitore, ad es.
SIMODRIVE 611 con
modulo di regolazione con
interfaccia analogica valore di
riferimento
Valore di riferimento analogico
Ingressi digitali, ad es.
asse 1: (X6-2), pin 2
Segnale della camma
di riferimento
Valore attuale encoder/
Tacca di zero encoder
Motore ad es. 1FT6
Asse ad es. tavola
ÏÏÏÏÍÍÍÍÍÍÍÍ
Camma di
riferimento
Figura 3-7 Struttura di principio del sistema: Ricerca del punto di riferimento mediante
tacca di zero encoder e tacca di zero esterna
Funzione
Il segnale della camma di riferimento viene collegato ad un ingresso digitale
dell’ADI4 (X6-2, pin 2...5). L’elaborazione del segnale della camma di riferimento
avviene nell’ambito della ricerca del punto di riferimento internamente al controllo.
Dopo il riconoscimento del segnale della camma di riferimento il controllo riduce la
velocità dell’asse fino alla velocità di accostamento al riferimento e richiede all’unità
ADI4 la ricerca del punto di riferimento con la successiva tacca di zero dell’encoder. Una volta riconosciuta la richiesta, l’ADI4 invia al controllo il valore attuale
dell’encoder come posizione di riferimento con la successiva tacca di zero dell’encoder.
Senza modo conforme 611U
Non sono necessarie ulteriori operazioni.
Con modo conforme 611U
Nella parola di uscita digitale, per l’asse per cui deve essere eseguita la ricerca del
punto di riferimento (ad es. asse 1) deve essere impostato il segnale corrispondente:
Parola di uscita digitale:
Bit 0:
= 0 => ”Asse 1: Tacca di zero da encoder 1 (X4-1)“
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-53
Parametrizzazione
3.9.11
Condizioni marginali
Tastatore o misura al volo
ADI4 supporta solo la misura con fronte positivo o negativo del tastatore di misura.
La parametrizzazione per la misura contemporanea su fronte positivo e su fronte
negativo non è supportata.
Valore attuale della velocità
Il valore attuale della velocità contenuto nel telegramma standard 3 (vedere la
tabella 3-1, pagina 3-40) (PZD2/3: NIST_B) non viene supportato dall’ADI4.
L’ADI4 invia sempre come valore attuale di velocità il valore 0.
Interfaccia encoder esterna (encoder senza asse)
Se all’ADI4 vengono collegati solo encoder senza parametrizzare almeno un asse,
ovvero se si utilizza l’ADI4 esclusivamente come interfaccia encoder esterna, non
viene emesso alcun segnale di pronto (”Ready”) (interfaccia X6-1, pin 10/11).
Per informazioni sul segnale di pronto, vedere il capitolo 2.2.7, pag. 2-20.
3.9.12
Condizioni marginali (SIMOTION)
Errore 20005
Nel passaggio da RUN a STOP della CPU di SIMOTION, viene visualizzato, in
relazione ad uno slave DP ADI4, il seguente messaggio:
Errore 20005: tipo di apparecchio: 1/2, indirizzo logico: x guasto. (bit: 0, motivo:
0x...)
Questo messaggio può essere ignorato.
Al successivo passaggio da STOP a RUN, questo messaggio verrà cancellato
automaticamente dal sistema.
Ricerca del riferimento mediante tacca di zero esterna
Indipendentemente dal fronte (di salita o di discesa) della tacca di zero esterna
selezionato in SIMOTION per la ricerca del punto di riferimento, quest’ultima
avviene sempre con il fronte di salita.
3.9.13
Condizioni marginali (CPU in tecnologia SIMATIC)
Ricerca del riferimento mediante tacca di zero esterna
Indipendentemente dal fronte (di salita o di discesa) della tacca di zero esterna
selezionato in SIMOTION per la ricerca del punto di riferimento, quest’ultima
avviene sempre con il fronte di salita.
3-54
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
Accesso ai dati di I/O
S7-Technology versione 1.0
Dal programma utente non si può accedere all’area indirizzi dell’ADI4.
S7-Technology versione 2.0
L’accesso ai dati di I/O dell’ADI4 dal programma utente può avvenire solo tramie
l’immagine della periferia del DP(DRIVE). A tal fine i dati di I/O devono trovarsi
nell’area indirizzi 0 ... 63. L’accesso avviene tramite i blocchi funzionali ”MC_ReadPeriphery” e ”MC_WritePeriphery”.
Non è invece possibile accedere ai telegrammi degli assi.
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-55
Parametrizzazione
3.10
Parametrizzazione della comunicazione DP
Una volta inseriti nella configurazione tutti gli slave DP previsti e dopo averne eseguito la parametrizzazione funzionale (fase 1), si procede, nella seconda fase, alla
parametrizzazione della comunicazione DP ciclica equidistante
Anche la parametrizzazione della comunicazione DP ciclica equidistante ha luogo
in due fasi:
Passo 1
- Attivazione del ciclo DP equidistante
- Master di equidistanza della percentuale ciclica TDX
Passo 2
- Ciclo DP equidistante TDP
- Ciclo applicazione master TMAPC
- Rilevamento valore attuale Ti
- Assunzione valore di riferimento To
Attenzione
Nella parametrizzazione della funzione di comunicazione DP occorre osservare le
condizioni marginali per i singoli parametri (vedere il capitolo 3.10.9, pagina 3-65).
3.10.1
Attivazione del ciclo DP equidistante
Facendo doppio clic con il tasto sinistro del mouse su uno slave DP ADI4 nella
finestra di stazione di Config HW, si apre la finestra di dialogo: ”Proprietà dello
slave DP”.
Nota
Si raccomanda di eseguire l’attivazione del ciclo DP equidistante per tutti gli slave
DP ADI4 attivando il ciclo DP equidistante nell’ambito dello slave DP ADI4
selezionato, e quindi di effettuare la sincronizzazione.
Quando si esegue la sincronizzazione, tutti i valori visualizzati nella finestra:
Proprietà dello slave DP
Scheda: Sincronizzazione di clock
vengono trasferiti su tutti gli slave DP dello stesso tipo, in questo caso sullo slave
DP ADI4.
3-56
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
Finestra di dialogo: del programma)
Finestra di dialogo: ”Proprietà dello slave DP”
Scheda: ”Sincronizzazione del clock”
Casella opzione: ”Sincronizza azionamento sul ciclo DP equidistante”
Pulsante: Taratura
Proprietà dello slave DP
Generalità Configurazione Sincronizzazione clock Encoder
Sincronizza azionamento su ciclo DP equidistante
Impostazioni di rete in ms:
Ciclo del bus equidistante attivato
Ciclo DP equidistante:
Master di equidistanza
della percentuale ciclica:
1.533
Reticolo/tempo base [ms]
Fattor
Ciclo applicazione
master [ms]:
1.625
=
1
e
x
1.625
=
Tempo Ti[ms]:
(Acquisizione valore attuale) 0.125
=
Tempo To [ms]:
(Assunzione valore
riferimento)
13
e
x
x
=
6
e
0.125
Reticolo/tempo base [ms]
Fattor
0.750
0.125
Reticolo/tempo base [ms]
Fattor
1
e
1.625
Reticolo/tempo base [ms]
Fattor
Ciclo DP [ms]:
0.516
x
0.125
Taratura
OK
Annulla
Help
Figura 3-8 Finestra di dialogo: Proprietà dello slave DP
Nota
Se in un progetto S7 sono presenti diversi tipi di slave DP equidistanti (ad es.
diversi azionamenti SIMODRIVE, ADI4, ecc.), è necessario eseguire i seguenti
passi:
1. Sincronizza azionamento su ciclo DP equidistante
2. Eseguire la sincronizzazione
Questi passi vanno eseguiti per ogni tipo di slave DP prima di poter proseguire con
l’impostazione degli altri parametri.
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-57
Parametrizzazione
3.10.2
Master di equidistanza della percentuale ciclica TDX
Dopo avere attivato la sincronizzazione di tutti gli slave DP sul ciclo DP
equidistante, occorre ricalcolare il tempo richiesto dalla componente ciclica della
comunicazione DP.
Il calcolo viene eseguito automaticamente dal master DP all’attivazione del ciclo di
bus equidistante. Per eseguire il calcolo, disattivare/attivare nella seguente finestra
di dialogo la casella di opzione: ”Attiva ciclo di bus equidistante”.
Finestra di dialogo: Continuazione
Finestra di dialogo: ”Proprietà dello slave DP”
Scheda: ”Generale”
Gruppo: ”Nodi/sistema master”
Pulsante: PROFIBUS...
Finestra di dialogo: ”Proprietà - Interfaccia PROFIBUS ADI4 ...”
Scheda: ”Parametri”
Pulsante: Proprietà...
Finestra di dialogo: ”Proprietà PROFIBUS”
Scheda: ”Impostazioni di rete”
Pulsante: Opzioni...
Finestra di dialogo: ”Opzioni”
Schdeda: ”Equidistanza”
1. Casella opzione: Attiva ciclo di bus equidistante
2. Casella opzione: Attiva ciclo del bus equidistante
Vedere la figura 3-9, pagina 3-59.
3-58
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3.10.3
Ciclo DP equidistante TDP
Durante il calcolo della percentuale ciclica della comunicazione DP, il valore per il
ciclo DP equidistante viene ridotto automaticamente al tempo minimo necessario.
Per revocare questa modifica occorre immettere nuovamente il valore previsto per
il ciclo DP equidistante.
Finestra di dialogo: Continuazione
Finestra di dialogo: ”Opzioni”
Ciclo DP equidistante: tempo equidistante
OK
OK
OK
Opzioni
Equidistanza Nodi di rete
Cavi
Attiva ciclo di bus equidistante / Ricalcola tempo di equidistanza
Numero di PG/OP/TD collegati al
PROFIBUS
0
0
Ciclo DP equidistante:
(minimo
0.427
2.000
Intervall
ms o:
0.001 ms
Dettagli ...
ms)
Sincronizzazione
degli
slave
Tempi Ti e To uguali per tutti gli slave
(altrimenti: impostare le opzioni in Proprietà Slave)
Tempo Ti (lettura valori di processo)
ms
Tempo To (uscita valori di processo):
ms
OK
Annulla
Help
Figura 3-9 Finestra di dialogo: Opzioni
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-59
Parametrizzazione
3.10.4
Tempo ciclo DP TDP
Finestra di dialogo: Continuazione
Finestra di dialogo: ”Proprietà dello slave DP”
Scheda: ”Sincronizzazione clock”
Ciclo DP (ms): < Fattore >
Il tempo di ciclo DP dello slave DP ADI4 deve essere impostato sul tempo di ciclo
del master DP visualizzato alla voce ”Ciclo DP equidistante”.
Vedere la figura 3-12, pagina 3-65.
Nota
Il tempo di ciclo DP (parametro: ciclo DP) dello slave DP ADI4 deve essere
impostato sullo stesso valore del tempo di ciclo DP impostato per il master DP
(parametro: ciclo DP equidistante).
Ciclo DP = Ciclo DP equidistante
3.10.5
Ciclo applicazione master TMAPC
Con il parametro: Ciclo di applicazione master TMAPC viene definito il rapporto
numerico intero tra l’applicazione master (regolatore di posizione del controllo) e il
ciclo DP equidistante.
Con rapporti diversi da 1:1 è quindi possibile ridurre i tempi morti del regolatore di
posizione nel caso di controlli con hardware di potenza ridotta.
Vedere le figure 3-10 e 3-11, pagina 3-61.
Finestra di dialogo: Continuazione
Finestra di dialogo: ”Proprietà dello slave DP”
Scheda: ”SIncronizzazione clock”
Ciclo applicazione master [ms]: < Fattore>
Vedere la figura 3-12, pagina 3-65.
3-60
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
TMAPC = TDP
NC:
Master oppure
regolatore di posizione
Comunicazione
PROFIBUS DP
TM
DPV1 GTR
R
TDX
TDX
1
2
GC Dx Dx Dx DPV1 GTR
GC Dx Dx Dx
R
R
Tempo ciclo del
regolatore di velocità
Azionamenti:
Slave DP: 1 ... 3
R
R
R
TI
R
R
R
R
R
TO
TI
R
R
R
R R
R
TO
Figura 3-10 Esempio: Ciclo DP ottimizzato con TMAPC : TDP = 1 : 1
TMAPC = 2 * TDP
NC:
Master oppure
regolatore di posizione
TM
R
TDP
TDP
TDX
TDX
1
Comunicazione
PROFIBUS DP
2
GC Dx Dx Dx DPV1 GTR
GC Dx Dx Dx DPV1 GTR
GC
R
R
R R
Tempo ciclo del
regolatore di
velocità
Azionamenti:
R
Slave DP: 1 ... 3
TI
R
R
R
R
R
R
R
R
R
R
TO
R R
R
R
R
TI
Figura 3-11 Esempio: Ciclo DP ottimizzato con TMAPC : TDP = 2 : 1
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-61
Parametrizzazione
Spiegazione per le figure 3-10 e 3-11:
TMAPC
Master-Application-Cycle: Clock del regolatore di posizione
TDP
DP-Cycle-Time: tempo di ciclo DP
TDX
Data Exchange-Time: somma dei tempi di trasmissione di tutti gli
slave DP
TM
Master-Time: Variazione dell’istante di avvio della
regolazione di posizione NC
TI
Input-Time: Istante di rilevamento del valore attuale. I valori attuali vengono trasferiti
al master DP nel successivo ciclo DP.
TO
Output-Time: Istante di assunzione del riferimento. I valori di riferimento sono
stati generati dall’applicazione master DP nel precedente ciclo DP.
GC
Telegramma Global-Control (telegramma Broadcast) per
la sincronizzazione ciclica dell’equidistanza tra master DP
e slave DP
R
Tempo di calcolo del regolatore di velocità o di posizione
Dx
Scambio dati utili tra master DP e slave DP
DPV1
Dopo la comunicazione ciclica viene trasmesso un servizio aciclico,
se non è stato ancora superato il tempo di arresto Token TTH. TTH viene
calcolato dal sistema di progettazione.
GTR
GAP, TOKEN, RESERVE:
GAP
Durante il GAP ha luogo il tentativo di ammettere nuovi nodi/partner attivi.
TOKEN
Il token viene passato a se stessi o ad altri master.
RESERVE La riserva viene impiegata come ”pausa attiva” per inviare il token a
se stessi fino allo scadere del ciclo equidistante.
1
2
I valori attuali per il corrente ciclo DP/clock del regolatore di posizione
vengono trasferiti dagli azionamenti slave DP al regolatore di posizione NC
I valori di riferimento calcolati dal regolatore di posizione NC
vengono trasferiti agli azionamenti slave DP
(SINUMERIK 802D)
Il rapporto tra ciclo applicazione master TMAC e ciclo DP TDP può essere impostato
diverso da 1:1.
(SINUMERIK 840Di), (SIMOTION) e (CPU in tecnologia SIMATIC)
Il rapporto tra ciclo applicazione master TMAC e ciclo DP TDP deve essere 1:1.
3-62
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
3.10.6
Rilevamento valore attuale Ti
Con il parametro: rilavemanto valore attuale Ti viene definito l’istante in cui vengono rilevati i valori attuali (valore attuale di posizione) da uno slave DP ADI4.
Si consiglia di impostare lo stesso istante di rilevamento del valore attuale Ti per
tutti gli slave DP ADI4, in particolare nel caso in cui gli assi di diversi slave DP
ADI4 seguono una traiettoria comune con interpolazione.
Finestra di dialogo: Continuazione
Finestra di dialogo: ”Proprietà dello slave DP”
Scheda: ”Sincronizzazione clock”
Rilevamento del valore attuale [ms]: < Fattore >
Vedere la figura 3-12, pagina 3-65.
Nota
Per l’istante dell’acquisizione del valore attuale Ti deve essere rispettata la
seguente condizione:
Ciclo DP >= rilevamento valore attuale >= tempo base
3.10.7
Assunzione valore di riferimento To
Con il parametro: assunzione del valore di riferimento To si definisce l’istante in cui,
da uno slave DP ADI4, viene acquisito il valore di riferimento della velocità dal
regolatore di posizione.
Si raccomanda di impostare subito il momento del assunzione del valore di riferimento To per tutti gli slave DP ADI4, in particolare se gli assi si interpolano reciprocamente.
Finestra di dialogo: Continuazione
Finestra di dialogo: ”Proprietà dello slave DP”
Scheda: ”Sincronizzazione clock”
Assunzione del valore di riferimento [ms]: < Fattore >
Vedere la figura 3-12, pagina 3-65.
Nota
Per l’istante dell’assunzione del valore di riferimento To deve essere rispettata la
seguente condizione:
Ciclo DP >= Assunzione valore di riferimento >= Master di equidistanza
della percentuale ciclica + tempo base
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-63
Parametrizzazione
3.10.8
Sincronizzazione
Con la sincronizzazione, i valori dello slave DP ADI4 attuale visualizzati nella
scheda: ”Sincronizzazione del clock” vengono trasferiti su tutti gli altri slave DP
ADI4 della configurazione.
Finestra di dialogo: Fine
Finestra di dialogo: ”Proprietà dello slave DP”
Scheda: ”Sincronizzazione clock”
Pulsante: Taratura
OK
Vedere la figura 3-12, pagina 3-65.
Nota
Se in un progetto S7 sono presenti diversi tipi di slave DP equidistanti, ad es.
diversi azionamenti SIMODRIVE, ADI4, ecc., è necessario impostare come sopra
descritto i seguenti parametri per ogni singolo tipo di slave DP ed eseguire una
sincronizzazione:
Ciclo DP equidistante TDP
Ciclo applicazione master TMAPC
Rilevamento valore attuale Ti
Assunzione valore di riferimento To
Con la sincronizzazione, i valori visualizzati nella scheda: ”Sincronizzazione di
clock” vengono trasmessi solo agli slave DP dello stesso tipo.
Una volta eseguita la sincronizzazione, la parametrizzazione di tutti gli slave DP
ADI4, per quanto riguarda l’aspetto della comunicazione DP, è terminata.
3-64
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
Proprietà dello slave DP
Generalità Configurazione Sincronizzazione clock
Sincronizza azionamento su ciclo DP equidistante
Impostazioni di rete in ms:
Ciclo del bus equidistante attivato
Ciclo DP equidistante:
Master di equidistanza della
percentuale ciclica:
2.000
Ciclo applicazione
master [ms]:
2.000
=
Fattore
1
Tempo base [ms]
x
2.000
=
Rilevamento del
valore attuale [ms]:
0.250
=
Assunzione del valore
di riferimento [ms]:
1.000
=
x
16
x
0.125
Tempo base [ms]
Fattore
x
8
0.125
Tempo base [ms]
Fattore
2
2.000
Tempo base [ms]
Fattore
Ciclo DP [ms]:
0.872
0.125
Taratura
OK
Annulla
Help
Figura 3-12 Finestra di dialogo: Proprietà dello slave DP
3.10.9
Condizioni marginali
ADI4 a partire da MLFB: 6FC5 211-0BA01-0AA1
Nella successiva parametrizzazione del ciclo DP equidistante, per quanto concerne l’ADI4 a
partire dall’MFLB: 6FC5 211 -0BA01 -0AA1 occorre rispettare le seguenti condizioni marginali:
Proprietà dello slave DP
Generalità Configurazione Sincronizzazione clock
Sincronizza azionamento su ciclo DP equidistante
Impostazioni di rete in ms:
Ciclo del bus equidistante attivato
Ciclo DP equidistante:
Master di equidistanza della
percentuale ciclica:
2.000
TDP
TDX
Tempo base [ms]
Fattore
Ciclo applicazione
master [ms]:
2.000
=
1
x
2.000
=
0.250
=
1.000
=
TI
Rilevamento del
valore attuale [ms]:
x
2
x
0.125
Tempo base [ms]
Fattore
8
0.125
Tempo base [ms]
Fattore
TO
Assunzione del valore
di riferimento [ms]:
16
2.000
Tempo base [ms]
Fattore
Ciclo DP [ms]:
0.872
x
0.125
Figura 3-13 Finestra di dialogo: Proprietà slave DP (sezione)
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-65
Parametrizzazione
1. Ciclo DP equidistante (TDP)
TDP = 2* n * 125 us;
con n w 4 (=> minimo TDP = 1 ms)
2. Assunzione valore di riferimento (To)
(TDX + 125 us) v TO t TDP;
con grandezza arrotondata TDX = TDX, arrotondato a un multiplo
intero di 125 us
3. Rilevamento valore attuale (Ti)
250 us v TI v TDP
(SIMOTION) e (CPU in tecnologia SIMATIC)
(250 us v TI v TDP) e (TI , 500 us)
4. TI e TO non devono essere nello stesso ciclo di 125 us
DT , 0; con DT = TDP - TI - TO
5. Se TO == (TDP - 125 us)
Allora deve valere per TI: TI u 3 * 125 us
6. Se TO == (TDX + 125 us)
Allora deve valere per (TI + TO): (TI + TO) , (TDP + 125 us)
DT
0
ÏÏÏÏÏÏÏÏÏÏÏÏÏÏ
ÎÎÎÎÎÎÎÎÎÎ
TI - Max.: TDP
TI - Min.: 2*125 us
TO
TO - Min.: TDX+125 us
TDX
1*125us
TI
TO - Max.: TDP
TDP
2*125 us 3*125 us 4*125 us 5*125 us 6*125 us 7*125 us 8*125 us
Figura 3-14 Rappresentazione grafica della condizioni marginali
(SINUMERIK 802D)
Sono valori di parametro tipici:
- Ciclo DP equidistante (TDP):
2,000 ms
- Rilevamento valore attuale (Ti):
0,250 ms
- Assunzione valore di riferimento (To): 1,000 ms
(SINUMERIK 840Di)
Sono valori di parametro tipici:
- Ciclo DP equidistante (TDP):
2,000 ms
- Rilevamento valore attuale (Ti):
0,250 ms
- Assunzione valore di riferimento (To): 1,000 ms
3-66
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Parametrizzazione
(SIMOTION) e (CPU in tecnologia SIMATIC)
Sono valori di parametro tipici:
- Ciclo DP equidistante (TDP):
2,000 ms
3,000 ms
- Rilevamento valore attuale (Ti):
0,250 ms
0,250 ms
- Assunzione valore di riferimento (To): 1,250 ms
1,000 ms
Nota
Gli slave DP ADI4:
- Numero di ordinazione (MLFB): 6FC5 211 -0BA01 -0AA0
- Numero di ordinazione (MLFB): 6FC5 211 -0BA01 -0AA1 opp. ... -0AA2
reagiscono diversamente a parametrizzazioni del rilevamento del valore attuale (Ti) e
assunzione del valore di riferimento (To) rispetto alle condizioni marginali di cui sopra.
Slave DP ADI4 con MLFB ... -0AA0
Questo slave DP ADI4 ignora le parametrizzazione non conformi alle condizioni
marginali sopraelencate poiché i parametri sono definiti internamente in modo fisso. Lo
slave DP ADI4 instaura la comunicazione ciclica con il master DP utilizzando i valori
preimpostati, diversi da quelli parametrizzati, e non segnala l’errore.
Slave DP ADI4 con MLFB ... -0AA1opp. ... -0AA2
Se in questo slave DP ADI4 viene caricata una parametrizzazione non conforme alle
condizioni marginali sopraelencate, lo slave DP ADI4 non instaura la comunicazione
ciclica con il master DP.
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
3-67
Parametrizzazione
3-68
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
4
Messa in servizio
4.1
4.1.1
Messa in servizio del controllo
Encoder lineare con tacche di zero / tacche di riferimento codificate
in base alla distanza (SINUMERIK 840Di)
Dati macchina
Per la messa in servizio del sistema di misura di un asse macchina con encoder
lineare dotato di tacche di zero / di riferimento codificate in base alla distanza
vanno impostati i seguenti dati macchina:
Numero
Identificatore: $MA_
Significato
30240
ENC_TYPE
Tipo encoder (trasferimento dati)
31000
ENC_IS_LINEAR
Tipo encoder (forma costruttiva): Encoder lineare
31010
ENC_GRID_POINT_DIST
Intervallo segnale e intervallo di suddivisione / fattore EXE
31040
ENC_IS_DIRECT
Tipo di montaggio encoder: Sistema di misura diretto
32100
AX_MOTION_DIR
Direzione del movimento (nessun influsso sul senso di regolazione)
32110
ENC_FEEDBACK_POL
Polarità del valore encoder (influsso sul senso di regolazione)
34090
REFP_MOVE_DIST_CORR
Traslazione punto di zero / punto di riferimento
La traslazione tra il punto di zero della macchina e la prima
tacca di riferimento.
34200
ENC_REFP_MODE
Modalità di ricerca punto di riferimento
34300
ENC_REFP_MARKER_DIST
Distanza tacche di riferimento (distanza base)
34310
ENC_MARKER_INC
Differenza di distanza tra due tacche di riferimento
Nota
Ditta Heidenhain: per tutti gli encoder lineari con tacche di
zero / di riferimento codificate in base alla distanza 20 mm
34320
ENC_INVERS
Orientamento del sistema di misura rispetto al movimento
dell’asse
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
4-69
Messa in servizio
Esempio
Sulla base dell’esempio seguente viene illustrato come vanno trattati i rapporti di
montagio dell’asse macchina e dell’encoder lineare nei dati macchina dell’asse
macchina interessato.
Encoder lineare utilizzato con tacche di zero / tacche di riferimento codificate in
base alla distanza:
Ditta Heidenhain: LS 476 C
Valori caratteristici tecnici (estratto)
Valore
Lunghezza di misurazione
270 mm
Distanza tacche di riferimento
20 mm
Intervallo segnale dei segnali incrementali con un intervallo di suddivisione
0.02 e interpolazione integrata: quintuplo
0.004 mm
Differenza di distanza tra due tacche di riferimento (specifico ditta Heidenhain)
0.02 mm
LS 476 C; lunghezza di misurazione ML = 270 mm
Differenza di distanza tra due tacche di riferimento:
10.06 - 10.04 = 0.02
60
270
10.06
40
10.04
20
0
10.02
Distanza tacche di riferimento
Figura 4-1 Encoder lineare: LS 476 C
A causa delle diverse possibilità di orientamento dell’asse macchina e dell’encoder
lineare (concorde / discorde), si distinguono 2 casi.
Dati macchina che restano invariati in entrambi i casi
Numero
Identificatore: $MA_
Valore
30240
ENC_TYPE
2
31000
ENC_IS_LINEAR
1
31010 *
ENC_GRID_POINT_DIST
0.004
31040
ENC_IS_DIRECT
1
34200
ENC_REFP_MODE
3
34300 *
ENC_REFP_MARKER_DIST
20
34310 *
ENC_MARKER_INC
0.02
*) Valori caratteristici tecnici dell’encoder
4-70
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Messa in servizio
Caso 1: Orientamento concorde
270
0
LS 476 C; lunghezza di misurazione ML = 270 mm
Traslazione punto di riferimento RV
-
+
0
Campo di movimento dell’asse macchina
Figura 4-2 Asse macchina con encoder lineare: orientamento concorde
Dati macchina variabili in funzione dell’orientamento
32100
AX_MOTION_DIR
1
32110
ENC_FEEDBACK_POL
1
34090
REFP_MOVE_DIST_CORR
RV
34320
ENC_INVERS
0
Caso 2: orientamento discorde
270
0
LS 476 C; lunghezza di misurazione ML = 270 mm
Traslazione punto di riferimento RV
-
+
0
Campo di movimento dell’asse macchina
Figura 4-3 Asse macchina con encoder lineare: orientamento discorde
Dati macchina variabili in funzione dell’orientamento
32100
AX_MOTION_DIR
1
32110
ENC_FEEDBACK_POL
-1
34090
REFP_MOVE_DIST_CORR
RV
34320
ENC_INVERS
1
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
4-71
Messa in servizio
4-72
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Condizioni marginali
5
Non vi sono ulteriori condizioni marginali da rispettare.
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
5-73
Condizioni marginali
5-74
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Indice analitico
Indice analitico
Simboli
(CPU della tecnologia SIMATIC), 3-34, 3-44,
3-46, 3-50, 3-54, 3-62, 3-66, 3-67
(H1/H2): Stato dell’unità, 2-25
(S2): Indirizzo PROFIBUS, 2-14
(SIMOTION), 3-34, 3-37, 3-44, 3-46, 3-50,
3-52, 3-54, 3-62, 3-66, 3-67
(SINUMERIK 802D), 2-19, 2-21, 2-24, 3-33,
3-37, 3-43, 3-62, 3-66
(SINUMERIK 840Di), 2-19, 3-33, 3-37, 3-44,
3-45, 3-48, 3-62, 3-66, 4-69
(SINUMERIK), 3-47, 3-52
(X1): Alimentazione esterna
Cavi di connessione, 2-12
Configurazione dei pin, 2-12
Connessione, 2-12
Tensione di alimentazione, 2-12
(X2): PROFIBUS DP
Cavo, 2-13
Configurazione dei pin, 2-13
Connessione, 2-13
Connettore, 2-13
Velocità di trasmissione dati, 2-13
(X3): Interfaccia analogica del valore di riferimento
Cavi confezionati, 2-16
Configurazione dei pin, 2-15
Connessione, 2-15
(X4-1/X4 -2/X5 -1/X5 -2): Interfacce encoder
Cavi confezionati, 2-17
Configurazione dei pin, 2-16
Connessione, 2-16
Lunghezze massime dei cavi, 2-17
Sistemi di misura collegabili, 2-18
Tensioni di alimentazione encoder, 2-18
(X6-1): Uscite digitali
Caratteristiche elettriche generali, 2-21
Cavi di connessione, 2-22
Configurazione dei pin, 2-20
Connessione, 2-20
Contatto a relè: Segnale di pronto ”Ready”,
2-22
Specifiche elettriche, 2-21
Tensione di alimentazione, 2-21
(X6-2): Ingressi digitali
Caratteristiche elettriche generali, 2-25
Cavi di connessione, 2-25
Configurazione dei pin, 2-23
Connessione, 2-23
Specifiche elettriche, 2-25
Tensione di alimentazione esterna
P24OUText, 2-24
Tensione di alimentazione interna P24OUT,
2-24
A
Ad abete, 2-19, 3-46
Alimentazione, 2-26
Assenza funzionalità vitale, 3-47
Assunzione del valore di riferimento, 3-63
B
Bit riservati per la risoluzione fine, 3-48
SINUMERIK 840Di, 3-48
C
Ciclo applicazione master, 3-60
CPU in tecnologia SIMATIC, 3-62
SIMOTION, 3-62
SINUMERIK 802D, 3-62
SINUMERIK 840Di, 3-62
Ciclo DP, 3-61
Ciclo DP equidistante, 3-56, 3-59
Codici di errore, Gx_XIST2, 3-42
Coerenza, 3-43
Collegamento a terra, 2-28
Condizioni al contorno, 1-10, 3-54, 3-65
CPU in tecnologia SIMATIC, 3-54, 3-66,
3-67
Encoder senza assi, 3-54
Errore 20005, 3-54
Interfaccia encoder esterna, 3-54
Misura al volo, 3-54
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Indice-75
Indice analitico
Ricerca del riferimento mediante tacca di
zero esterna, 3-54
SIMOTION, 3-54, 3-66, 3-67
SINUMERIK 802D, 3-66
SINUMERIK 840Di, 3-66
Tastatore di misura, 3-54
Valore attuale delle velocità, 3-54
Condizioni marginali, 5-73
Configurazione, 3-35
Costante tempo di spianamento:, SINUMERIK
840Di, 3-45
CPU 317T, 3-34
CPU della tecnologia, 3-34
D
Data Exchange-Time, 3-62
Dati tecnici, 2-31
Descrizione dei componenti hardware, 2-11
Descrizione delle interfacce, 2-12
Disegno quotato, 2-30
DM34990, SINUMERIK 840Di, 3-45
Drive ES Basic, 3-34
Dx, 3-62
Indirizzo PROFIBUS, 3-37
Informazioni generali, 1-9
Ingressi digitali, 2-27
Input -Time, 3-62
Interfaccia
(H1/H2): Stato dell’unità, 2-25
(S2): Indirizzo PROFIBUS, 2-14
(X1): Alimentazione esterna, 2-12
(X2): PROFIBUS DP, 2-13
(X3): Interfaccia analogica del valore di riferimento, 2-15
(X4-1/X4 -2/X5 -1/X5 -2): Interfacce encoder, 2-16
(X6-1): Uscite digitali, 2-20
(X6-2): Ingressi digitali, 2-23
Interfaccia encoder esterna, 3-54
L
Lunghezza totale, 3-43
M
M3, 3-47
M4, 3-47
M5, 3-47
E
Mandrino unipolare, 3-46
Encoder abilitati, Encoder lineare con tacche di
CPU in tecnologia SIMATIC, 3-46
zero / tacche di riferimento codificate in
SIMOTION, 3-46
base alla distanza, 2-19
SINUMERIK, 3-47
Encoder assoluto, SSI, 2-19
Master di equidistanza della percentuale
Encoder incrementali, TTL, 2-18
ciclica, 3-58
Encoder lineare, 2-19
Master -Application-Cycle, 3-62
SINUMERIK, 4-69
Master -Time, 3-62
Encoder senza assi, 3-54
Messa in servizio del controllo, 4-69
Errore encoder, 3-41
Messa in servizio dell’NC, 4-69
Errori tollerabili di funzionalità vitale, 3-47
Misura al volo, 3-41, 3-54
EXCHANGE, LED: ADI4, 2-25
Modo conforme 611U, 3-40, 3-41, 3-43, 3-44,
3-49
con, 3-51, 3-52, 3-53
CPU in tecnologia SIMATIC, 3-50
G
senza, 3-51, 3-52, 3-53
GAP, 3-62
SIMOTION, 3-50, 3-52
GC, 3-62
SINUMERIK, 3-52
GTR, 3-62
Montaggio, 2-26
Gx_STW, 3-41
Montaggio in armadio elettrico, 2-26
Gx_XIST2, 3-42
Motore unipolare, 3-46
CPU in tecnologia SIMATIC, 3-46
SIMOTION, 3-46
I
SINUMERIK, 3-47
Indirizzi I/O, 3-42
Indice-76
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Indice analitico
N
N. di ordinazione: 6FC5 211-0BA01-0AA0,
1-9, 3-67
N. di ordinazione: 6FC5 211-0BA01-0AA1,
3-34, 3-65, 3-67
Numero di ordinazione, 1-9
O
Output -Time, 3-62
OVTEMP, LED: ADI4, 2-25
P
Panoramica dei collegamenti, 1-9, 2-11, 2-29
Panoramica delle interfacce, 2-12
Parametri di funzione
CPU in tecnologia SIMATIC, 3-44
SIMOTION, 3-44
SINUMERIK 802D, 3-43
SINUMERIK 840Di, 3-44
Parametri PROFIBUS
SIMOTION, 3-37
SINUMERIK 802D, 3-37
SINUMERIK 840D, 3-37
Parametrizzazione, 3-33
Parametrizzazione della comunicazione DP,
3-56
Parametrizzazione di PROFIBUS-DP, 3-35
Parola d’ingresso, 3-40
Parola di comando encoder, 3-41
Parola di uscita, 3-40
Posa dei cavi, 2-26
POWER, LED: ADI4, 2-25
Presupposti
CPU in tecnologia SIMATIC, 3-34
SIMOTION, 3-34
SINUMERIK 802D, 3-33
SINUMERIK 840Di, 3-33
Principali caratteristiche, 1-9
Proprietà, 1-9
R
Rampa di shutdown, 3-47
READY, LED: ADI4, 2-25
RESERVE, 3-62
Ricerca del punto di riferimento
CPU in tecnologia SIMATIC, 3-50
SIMOTION, 3-50, 3-52
SINUMERIK, 3-52
Tacca di zero encoder, 3-51
Tacca di zero encoder ed esterna, 3-53
Tacca di zero esterna, 3-52
Ricerca della tacca di riferimento, 3-41, 3-49
Rilevamento del valore reale, 3-63
Risoluzione fine, 3-48
SINUMERIK 840Di, 3-48
S
S7 Technology, 3-34
Segnale del senso di rotazione, 3-46
Segnali del senso di rotazione, 3-47
Sequenza di parametrizzazione, 3-35
SIMATIC Manager STEP7, 3-34
SIMATIC STEP7, 3-34
SIMOTION C, 3-34
SIMOTION D, 3-34
SIMOTION P, 3-34
SlaveOM, 3-33
Struttura dei telegrammi, 3-40
T
Tacca di zero encoder, 3-49, 3-50, 3-51, 3-53
Tacca di zero esterna, 3-49, 3-50, 3-52, 3-53
Tacche di riferimento, 2-19
SINUMERIK 840Di, 4-69
Tacche di zero codificate in base alla distanza,
2-19
SINUMERIK 840Di, 4-69
Taratura, 3-64
Tastatore di misura, 2-25, 3-54
TDP, 3-59, 3-60, 3-62
TDX, 3-58, 3-62
Telegramma Global Control, 3-62
tempo di ciclo DP, 3-62
Tempo di ritardo dello shutdown, 3-47
Tensioni di alimentazione (+24 V DC), 2-27
TI, 3-62, 3-63
Tipo di encoder, 3-45
SSI, 3-45
TTL, 3-45
Tipo telegramma, 3-39
TM, 3-62
TMAPC, 3-60, 3-62
CPU in tecnologia SIMATIC, 3-62
SIMOTION, 3-62
SINUMERIK 802D, 3-62
SINUMERIK 840Di, 3-62
TO, 3-62, 3-63
TOKEN, 3-62
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Index-77
Indice analitico
U
Unità ADI4, 2-26
Uscite digitali, 2-27
V
Valore attuale delle velocità, 3-54
Valore attuale encoder aggiuntivo, 3-42
Versione firmware, 1-9
Index-78
Siemens AG 2005 All Rights Reserved
ADI4 - Interfaccia analogica dell’azionamento per 4 assi, Edizione 05.2005
Proposte
SIEMENS AG
A&D MC BMS
Postfach 3180
Correzioni
per documentazione:
D-91050 Erlangen
Tel.: +49 (0) 180 5050 - 222 [Hotline]
Fax: +49 (0) 9131 98 - 63315 [documentazione]
E -Mail: [email protected]
Documentazione per il costruttore / per il
service
Manuale dell’apparecchio
Mittente
N. di ordinaz.:6FC5 297-0BA01-0CP4
Edizione:
05.2005
Nome
Indirizzo della ditta/reparto
Via
Cap:
ADI4 - Interfaccia di azionamento
analogica per 4 assi
SIMATIC, SIMOTION, SINUMERIK
Località:
Telefono:
/
Telefax:
/
Suggerimenti e/o correzioni
Se consultando il presente manuale si
riscontrassero errori di stampa.
Vi preghiamo di segnalarceli utilizzando questo
modulo.
Vi saremo altresì grati per eventuali
suggerimenti o proposte migliorative.
Siemens AG
Automation and Drives
Motion Control Systems
Postfach 3180, D – 91050 Erlangen
Repubblica Federale Tedesca
www.siemens.com/motioncontrol
© Siemens AG 2005
Ci riserviamo eventuali modifiche
N. di ord.: 6FC5 297-0BA01-0CP4
Stampato nella Repubblica Federale Tedesca