Appunti del Corso di
Complementi di Elettromagnetismo
Tullio Bressani e Elena Botta
Dipartimento di Fisica Sperimentale
Anno Accademico 2006–2007
Indice
1 Equazioni di Maxwell
5
1.1 Le leggi di Laplace e Coulomb . . . . . . . . . . . . . . . . . . 10
2 Potenziali E.M.
2.1 Potenziale vettore e potenziale scalare . . . . . . . . . . . . . .
2.2 Superpotenziale di Hertz . . . . . . . . . . . . . . . . . . . . .
2.3 Calcolo dei Potenziali con il metodo di Green . . . . . . . . .
18
18
21
23
3 L’energia del campo elettromagnetico.
28
3.1 Il vettore di Poynting . . . . . . . . . . . . . . . . . . . . . . . 28
3.2 Il tensore degli sforzi elettromagnetici . . . . . . . . . . . . . . 32
3.3 Quantità di moto E.M.. . . . . . . . . . . . . . . . . . . . . . 35
4 Propagazione di onde E.M. nel vuoto
4.1 Introduzione . . . . . . . . . . . . . . . . . .
4.2 Tecnica di separazione delle variabili . . . .
4.2.1 Coordinate cartesiane . . . . . . . . .
4.2.2 Coordinate cilindriche . . . . . . . .
4.3 Propagazione di onde a simmetria cilindrica
.
.
.
.
.
40
40
41
41
45
48
.
.
.
.
.
53
53
53
60
65
65
6 Guide d’onda
6.1 EqM per la guida d’onda . . . . . . . . . . . . . . . . . . . . .
6.2 Esempi di propagazione in guide d’onda con contorno definito
6.2.1 Guida d’onda a sezione rettangolare . . . . . . . . . . .
74
74
83
83
5 Irraggiamento di onde E.M.
5.1 Introduzione . . . . . . . .
5.2 Dipolo oscillante . . . . .
5.3 Oscillazioni smorzate . . .
5.4 Onde E.M. in risonanza .
5.5 Antenna Lineare . . . . .
.
.
.
.
.
.
.
.
.
.
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
INDICE
6.3
6.4
6.5
6.2.2 Guida d’onda a sezione circolare . .
Cavo coassiale . . . . . . . . . . . . . . . .
Attenuazione lungo una guida d’onda reale
Cavità risonanti . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
92
97
100
101
7 Generatori di onde EM
105
7.1 Il klystron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
8 Fibre ottiche
8.1 Considerazioni generali . . . . . . . . .
8.2 Trasmissione di segnali in fibre ottiche
8.3 L’approssimazione dell’iconale . . . . .
8.4 Le formule di Fresnel . . . . . . . . . .
8.5 Propagazione modale nelle fibre ottiche
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
9 Ottica coerente
9.1 Elementi di Ottica coerente . . . . . . . . . . . .
9.2 L’interferometro di Michelson . . . . . . . . . . .
9.3 L’esperimento di Michelson e Morley . . . . . . .
9.4 La massa apparente dei fotoni . . . . . . . . . . .
9.5 Coerenza di un’onda E.M. . . . . . . . . . . . . .
9.5.1 Coerenza spaziale e temporale . . . . . . .
9.5.2 Grado di coerenza spaziale e temporale . .
9.5.3 Misura della coerenza spaziale e temporale
9.6 Olografia . . . . . . . . . . . . . . . . . . . . . . .
9.6.1 Generalità . . . . . . . . . . . . . . . . . .
9.6.2 Principio fisico dell’olografia . . . . . . . .
9.6.3 Olografia in asse e fuori asse . . . . . . . .
9.6.4 Olografia in riflessione . . . . . . . . . . .
9.6.5 Applicazioni dell’olografia . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
113
. 113
. 114
. 118
. 121
. 127
.
.
.
.
.
.
.
.
.
.
.
.
.
.
133
. 133
. 136
. 138
. 141
. 147
. 147
. 149
. 151
. 154
. 154
. 156
. 159
. 161
. 162
A Operatori Scalari e Vettoriali
164
B Teoremi notevoli del Calcolo Differenziale
168
C Espressione di operatori differenziali in diverse coordinate 172
D Cenni sulle Trasformate di Fourier
175
D.1 Serie trigonometriche di Fourier . . . . . . . . . . . . . . . . . 175
D.2 Integrale di Fourier . . . . . . . . . . . . . . . . . . . . . . . . 177
4
INDICE
E Cenni sui tensori
178
E.1 Generalità sui tensori . . . . . . . . . . . . . . . . . . . . . . . 178
E.2 Definizione di tensore . . . . . . . . . . . . . . . . . . . . . . . 179
F Cenni sulle funzioni di Bessel
181
Capitolo 1
Equazioni di Maxwell
La descrizione in termini classici dei fenomeni elettromagnetici (E.M.) è data
dalle equazioni di Maxwell (EqM) e risale a 140 anni fa. Ad essere pignoli, Maxwell aggiunse un termine (la corrente di spostamento) ad una delle
quattro equazioni, già proposte da altri autori precedenti, ma il suo nome
è associato a tutto il complesso di equazioni che legano i campi E.M. alle
sorgenti (distribuzioni di cariche e di correnti) in quanto egli operò la prima unificazione tra fenomeni fisici apparentemente scorrelati (l’elettricità, il
magnetismo e l’ottica).
L’osservazione principale era che la velocità di propagazione delle oscillazioni trasversali dell’ipotetico mezzo materiale, l’etere (che non serviva a
niente altro se non a suffragare l’ipotesi che un qualsiasi fenomeno fisico non
potesse avvenire se non in presenza di un mezzo materiale) era eguale a quella
della luce. Dal senno di poi sappiamo che l’etere, come altre entità fisiche che
dovevano esistere, anche se non accessibili a nessuna misura diretta, per non
contraddire le elucubrazioni teoriche più gettonate in quel momento (tipo il
calorico), non esiste.
I fisici di oggi continuano a muoversi nella direzione indicata da Maxwell di cercare l’unificazione di fenomeni apparentemente scorrelati, e con
successo (l’unificazione tra interazioni E.M. e interazioni deboli è di un paio
di decenni fa.)
Pur con i limiti concettuali (trattazione non relativistica) le EqM rimangono ancora oggi lo strumento di base per la comprensione di tutti i
fenomeni E.M., e soprattutto per le applicazioni.
Ricordiamo le EqM, nel sistema SI, in forma differenziale, nel vuoto:
~ = ρ/ǫ0
∇·E
(alias teorema di Gauss)
~ = 0 (non ci sono cariche magnetiche libere)
∇·B
5
(1.1)
(1.2)
6
CAPITOLO 1. EQUAZIONI DI MAXWELL
~
~ = − ∂B
∇×E
∂t
(alias legge di Faraday − Neumann − Lenz)
(1.3)
~
~ = µ0~j + ǫ0 µ0 ∂ E
∇×B
(1.4)
∂t
(senza l’ultimo termine è il teorema della circuitazione di Ampère).
~ è il vettore intensità di campo elettrico,
Nelle precedenti equazioni E
~
B è il vettore induzione magnetica, ρ la densità di carica e ~j la densità di
corrente.
L’uso del sistema SI è il “meno peggio” soprattutto per quanto riguarda le applicazioni, dove siamo condizionati dall’uso generalizzato di Volt/m
~ e Tesla per B.
~ Siamo peraltro costretti a portarci dietro i valori ǫ0 =
per E
√
−12
−1
8.84 × 10
F m e µ0 = 12.566 × 10−7 N A−2 . Per fortuna 1/ ǫ0 µ0 = c
= 299792456.2±1.1 m s−1 , misurata con tale precisione da costituire ormai
una grandezza fondamentale.
Il sistema di Gauss, che fa comparire c nei secondi membri delle (1.1)
e (1.4), è più semplice nella scrittura delle equazioni e nell’interpretazio~ e B
~ in unità poco
ne, ma si porta dietro la complicazione di esprimere E
convenzionali.
A puro titolo di esempio di complicazioni dovute alle unità di misura
e di assoluta validità delle EqM a descrivere qualsiasi fenomeno elettromagnetico, poniamoci questo problema. I fenomeni di tipo elettrico (o meglio
elettrostatico) sono molto più evidenti che non quelli di tipo magnetico ( o
meglio magnetostatico), e ciò porta alla convinzione errata che le intensità
~ ottenibili e maneggiabili siano molto superiori a quelli di B.
~ In realtà
di E
stiamo paragonando grandezze fisiche diverse, espresse in unità di misura
convenzionali diverse, cioè le classiche capre con cavoli. Possiamo ottenere un paragone significativo guardando gli effetti. È noto che la densità di
~ uniforme ed un
energia W in una regione spaziale in cui esiste un campo E
~
campo di induzione magnetica B uniforme sono date da:
1
WE = ǫ0 E 2
2
(1.5)
e rispettivamente
WB =
1 2
B
2µ0
(1.6)
supponendo di essere nel vuoto ed indicando con E e B i moduli dei rispettivi
vettori.
Chiediamoci ora quale sia l’intensità del campo elettrico, E, supposto
uniforme nel volume che consideriamo (1 m3 ), necessario ad avere la stessa
7
densità di energia ottenuta con un campo di induzione B, sempre uniforme,
di 1T. Si vede immediatamente che deve essere E=cB e quindi E risulta essere
di 3 × 108 V/m. Per completezza, la densità di energia W risulta essere di
∼ 4 × 105 J/m3 .
Per quanto riguarda la densità di energia magnetica, i valori descritti
sono facilmente ottenibili e comunemente usati, in Laboratorio ma anche in
diagnostica medica (risonanza magnetica nucleare). Lo stesso non è per la
densità di energia elettrica. Campi elettrostatici di 3 × 108 V/m non sono
ottenibili, non certo in aria, come per il campo magnetico, ma neanche in
condizioni di vuoto spinto. Perchè e come lo vediamo dalle EqM. Premettiamo che molto spesso, a seconda delle circostanze, confonderemo il “vuoto
teorico” con il “vuoto sperimentale” e con l’aria, nel senso che in molte circostanze i fenomeni sono sostanzialmente gli stessi. Questo non è il caso
dell’esempio sopra riportato, nel senso che in aria, ma anche in condizioni
di “vuoto sperimentale” esistono comunque delle cariche libere, che vengono
~ e dissipano l’energia immagazzinata, mentre non
accelerate in un campo E
esistono cariche magnetiche libere e questo è contenuto nelle prime due EqM.
Nelle EqM nel vuoto compaiono ρ e ~j, nell’ipotesi che la carica sia
una grandezza fisica continua. Dall’esperimento di Millikan, successivo alla
formulazione delle EqM, sappiamo che non è cosı̀, ma che esiste una carica
elettrica elementare, quella dell’elettrone, pari a 1.6 × 10−19 C. Sappiamo
anche che le cariche elementari positive e negative sono associate a particelle
di massa diversa, quella positiva al protone di massa 1.67252×10−27 kg e
quella negativa all’elettrone di massa 9.10909×10−31 kg. Come possiamo
esprimere ρ e ~j in maniera realistica, tenendo conto che la carica è discreta?
Possiamo scrivere classicamente:
dq = ρ dV
con ρ = ρ(x, y, z, t)
(1.7)
e quindi
q =
Z
V
ρ dV
(1.8)
per quanto riguarda la carica totale contenuta in un volume V .
Tenendo conto della struttura atomica della materia possiamo scrivere, in luogo della (1.8):
n(V )
q =
X
qi
(1.9)
i=1
che descrive il fatto che la carica considerata è costituita da n(V ) cariche
elementari qi appartenenti agli elettroni ed agli ioni positivi, oppure ai nuclei
8
CAPITOLO 1. EQUAZIONI DI MAXWELL
atomici, della materia contenuta nel volume V . Scegliendo, anzichè V , un
volume ∆V abbastanza piccolo, la densità di carica nel suo punto centrale
può essere assunta eguale alla densità media. Possiamo cioè porre:
ρ =
Pn(∆V )
i=1
qi
∆V
(1.10)
Ciò richiede, però, che, anche quando ∆V è molto piccolo, n(∆V ) sia grande
abbastanza da poter ritenere continua la distribuzione di carica. In pratica
ciò accade quasi sempre; il numero di cariche presenti nella materia è, infatti,
molto elevato essendo il suo ordine di grandezza compreso tra 1026 /m3 , per
i gas in condizioni normali di temperatura e pressione, e 1031 /m3 , per le
sostanze solide. Si badi però che nelle (1.9) e (1.10) intervengono cariche qi di
segno opposto le quali, per un oggetto materiale macroscopico, si compensano
di regola quasi esattamente. L’eccesso di una carica, positiva o negativa, su
1011 ÷ 1012 cariche dei due segni corrisponde già ai massimi possibili valori di
ρ. Ciò è dovuto al fatto che un sensibile eccesso di carica, positivo o negativo,
darebbe luogo a delle forze repulsive cosı̀ intense da vincere la coesione della
materia di cui è costituito l’oggetto.
Tuttavia, utilizzando una speciale funzione discontinua dovuta a Dirac, è possibile estendere il concetto di densità di carica anche a distribuzioni
discrete, contenenti un numero di cariche arbitrariamente piccolo. Consideriamo, a questo scopo, la cosiddetta f unzione δ tridimensionale; essa, data
una funzione arbitraria del posto ~x, f (~x), è definita dalla relazione:
Z
V
f (~x) δ(~x − x~i ) dV = f (x~i )
(1.11)
e, in particolare,
Z
V
δ(~x − x~i ) dV = 1
(1.12)
Sostanzialmente δ(~x − x~i ) è una funzione nulla dappertutto, tranne nel punto
x~i dove, pur soddisfacendo la condizione (1.12), assume un valore infinito.
Poniamo, come definizione di ρ:
n(V )
ρ(~x) =
X
i=1
qi δ(~x − x~i )
(1.13)
da essa risulta subito, integrando su V , che la (1.8) è verificata e la carica
totale q assume il valore (1.9) indipendentemente da ogni restrizione sul valore di n. La (1.13) esprime pertanto, nel modo più generale, la relazione tra
ρ e la distribuzione della cariche qi .
9
Al moto delle cariche possiamo associare un vettore ~j, detto densità
di corrente, mediante le seguenti due relazioni:
~j =
e
Pn(∆V )
i=1
qi v~i
∆V
(1.14)
n(∆V )
~j =
X
i=1
qi v~i δ(~x − x~i )
(1.15)
dove v~i è la velocità della i–esima carica. La (1.14), analogamente al caso della (1.10), corrisponde al caso della distribuzione continua; la (1.15),
analogamente alla (1.13), è del tutto generale.
Introducendo la seguente definizione della velocità media delle n(∆V )
cariche:
~v =
Pn(∆V )
i=1
qi v~i
Pn(∆V )
i=1
qi
e, ricordando la (1.10), possiamo scrivere:
~j = ρ ~v
(1.16)
(1.17)
La generalizzazione della (1.16) al caso della distribuzione discreta è
banale: ~v , in questo caso, può essere calcolato sostituendo le (1.13) e (1.15)
nella (1.17). Si deve notare, riguardo l’equazione (1.16), che il rapporto tra la
velocità media ~v e le velocità ~vi delle singole cariche può essere diversissimo
a seconda dei casi. Nei raggi catodici, ad esempio, ~v coincide praticamente
con le velocità dei singoli elettroni; gli elettroni di conduzione di un metallo, invece, posseggono delle velocità che raggiungono i 106 m/s, contro una
velocità media, dovuta al passaggio della corrente, dell’ordine di soli 10−4
m/s.
Un’ulteriore considerazione riguarda la linearità delle EqM nei campi
~
~
E e B. Ciò significa che il campo esistente in un dato punto dello spazio,
dovuto alla presenza di un certo numero N di sorgenti (cariche e correnti)
è la somma vettoriale degli N campi dovuti alle singole sorgenti in conformità al P rincipio di Sovrapposizione. Dalla struttura stessa delle EqM
~ è un vettore polare, che cambia cioè segno per
appare anche chiaro che E
~ è invece un vettore assiale
inversione del segno delle coordinate spaziali, e B
(o pseudovettore), che non cambia segno. Si ricorda infatti che l’operatore
∇× trasforma un vettore polare in uno assiale e viceversa. Le (1.3) e (1.4)
evidenziano questa proprietà.
Per descrivere i fenomeni E.M. nei mezzi materiali è noto che bisogna
~ e H,
~ con le debite complicazioni di forma e di sostanza.
introdurre i vettori D
Le affronteremo al momento debito.
10
1.1
CAPITOLO 1. EQUAZIONI DI MAXWELL
Le leggi di Laplace e Coulomb
Consideriamo un fenomeno puramente stazionario, per il quale cioè il campo
~ il campo magnetico di induzione B,
~ la densità di caelettrico di intensità E,
~
rica ρ e la densità di corrente j non variano nel tempo; partendo dalle EqM
(1.1)–(1.4) si possono ricavare le espressioni esplicite dei campi (statici), che
saranno, in generale più utili della legge della circuitazione di Ampère (1.4)
o del teorema di Gauss (1.1), i quali determinano i campi solo in forma implicita. Il procedimento qui usato è estensibile anche al caso non stazionario,
ponendo però una particolare cura nell’esame della dipendenza temporale dei
campi, e verrà utilizzato nel seguito del Corso per risolvere le EqM nel caso
generale.
Consideriamo l’equazione (1.4); nel caso stazionario essa si riduce a:
~ = µ0~j
∇×B
(1.18)
applicando ad ambo i membri l’operatore vettoriale rotore si ottiene:
~ = ∇∇ · B
~ − ∇2 B
~ = ∇ × µ0~j
∇×∇×B
(1.19)
dove ∇2 indica l’operatore laplaciano e dove si è tenuto conto che vale la
relazione vettoriale:
~ = ∇∇ · B
~ − ∇2 B
~
∇×∇×B
(1.20)
Ricordando la (1.2) la (1.19) diventa:
~ = −µ0 ∇ × ~j
∇2 B
(1.21)
In modo analogo, applicando l’operatore rotore alla (1.3) scritta nel caso
stazionario si ottiene:
~ = ∇∇ · E
~ − ∇2 E
~ = 0
∇×∇×E
(1.22)
che, ricordando la (1.1), fornisce l’equazione:
~ =∇
∇2 E
ρ
ǫ0
(1.23)
~ B
~ e ~j vengano espressi
Le due equazioni vettoriali (1.21) e (1.23), qualora E,
mediante le loro componenti cartesiane, si riducono ad un sistema di sei
equazioni scalari della forma:
∇2 ϕ = Φ
(1.24)
11
1.1. LE LEGGI DI LAPLACE E COULOMB
~ i (i = 1, 2, 3) o, rispettivamente, ϕ = E
~ i e Φ = −µ0 ∇ × ~j
dove ϕ = B
i
o, rispettivamente, Φ = ∇ ǫρ0 . Come si può vedere, Φ è una funzione
i
assegnata del posto, dipendente dalla particolare distribuzione delle cariche
o da quella delle correnti, supposte note per il problema considerato.
Per integrare la (1.24) si applica un metodo, dovuto a G. Green,
che consiste nell’applicare l’omonimo lemma alla funzione scalare incognita ϕ ed ad un’ altra funzione scalare ausiliaria, g, che non essendo fissata
dal problema può essere scelta in modo opportuno. Generalmente conviene
scegliere:
1
1
=
r
rP Q
g =
(1.25)
dove r (rP Q ) è la distanza da un punto variabile Q al punto P in cui si vuole
determinare il valore di ϕ. La funzione g è regolare in tutto lo spazio eccetto
il punto P in cui, essendo r = 0, essa diventa infinita; inoltre, escluso il punto
P , per essa vale ovunque l’equazione:
1 d
dg
∇g = 2
r2
r dr
dr
2
!
= 0
(1.26)
come è facile verificare considerando l’operatore laplaciano in coordinate
polari sferiche e considerando che g non dipende dagli angoli polare ed
azimuthale.
Il lemma di Green può essere scritto come:
Z V
2
2
h∇ f − f ∇ h dV =
Z
S
(h∇f − f ∇h) · ~ndS
(1.27)
dove f e g sono due funzioni scalari regolari sul volume V , S è la superficie
che comprende il volume V e ~n è la normale esterna alla superficie S. Per
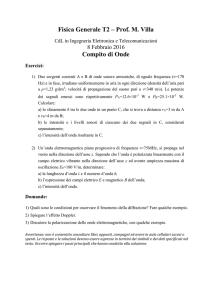
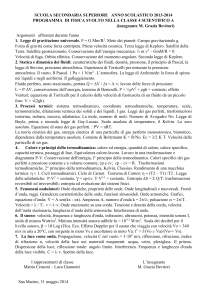
applicare il teorema nel caso in questione, consideriamo un volume V ∗ compreso entro una superficie S di forma arbitraria che contenga il punto P ed
una seconda superficie sferica S0 , di raggio molto piccolo, ǫ, concentrica al
punto P , come indicato in figura 1.1. Poichè in questo volume le funzioni ϕ
e g sono entrambe regolari (la funzione ϕ è regolare in quanto rappresenta
una grandezza fisica), dal lemma di Green abbiamo:
Z
V∗
g∇2 ϕ − ϕ∇2 g dV
=
Z
S0
Z
S
(g∇ϕ − ϕ∇g) · ~n dS0 +
(g∇ϕ − ϕ∇g) · ~n dS
(1.28)
12
CAPITOLO 1. EQUAZIONI DI MAXWELL
Figura 1.1:
ovvero, applicando la definizione di derivata direzionale di un campo scalare
dh
h secondo la direzione individuata dal versore ~u, du
= ∇h · ~u:
Z
V∗
2
2
g∇ ϕ − ϕ∇ g dV
!
dg
dϕ
dS0 +
−ϕ
=
g
dn
dn
S0
!
Z
dg
dϕ
dS
−ϕ
g
dn
dn
S
Z
(1.29)
Usando le equazioni (1.24) e (1.26) l’intergrale a primo membro diventa:
Z
V∗
2
2
g∇ ϕ − ϕ∇ g dV =
Z
V∗
g Φ dV
(1.30)
Trasformiamo il primo integrale a secondo membro della (1.29). Tenendo
conto che sulla superficie S0 la normale ~n, essendo diretta all’esterno di V ∗ ,
è opposta al raggio ~r ( ~rP Q )risulta:
d
∂
= −
dn
∂r
d
−
dr
!
per g(r)
(1.31)
inoltre,
dS0 = ǫ2 dω
(1.32)
ove dω indica l’angolo solido elementare sotteso da dS0 rispetto al punto P ,
e esplicitando g, il primo integrale di superficie nella (1.29) si scrive:
Z
S0
!
dϕ
dg
dS0
g
−ϕ
dn
dn
= −
Z
= −
Z
S0
4π
!
dg
∂ϕ
dS0
−ϕ
g
∂r
dr
!
1 ∂ϕ
1
+ ϕ 2 dω
ǫ ∂r
ǫ
(1.33)
13
1.1. LE LEGGI DI LAPLACE E COULOMB
Introducendo i valori medi ϕ e ∂ϕ
della funzione ϕ e della sua derivata valutati
∂r
sulla superficie S0 e facendo tendere a zero il raggio ǫ, la (1.33) diventa:
Z
S0
lim
Z
ǫ→0 S0
!
dg
dϕ
dS0
−ϕ
g
dn
dn
!
dϕ
dg
g
dS0
−ϕ
dn
dn
2
= −4πǫ
=
1 ∂ϕ
1
+ ϕ 2
ǫ ∂r
ǫ
!
−4π ϕ = −4πϕ(P )
(1.34)
Inserendo questo risultato e la (1.30) nella (1.29) si ottiene:
ϕ(P )
1 dϕ(Q)
1 drP Q
1
+ ϕ(Q) 2
=
4π S rP Q dn
rP Q dn
Z
1
Φ(Q)
−
dVQ
4π V rP Q
Z
!
dSQ −
(1.35)
in cui V indica l’intero volume interno alla superficie S (escluso il punto P ).
Questa equazione, benchè dia un’espressione esplicita di ϕ non risolve
ancora il problema della determinazione della funzione ϕ; essa infatti richiede
la conoscenza di ϕ e di dϕ/dn sulla superficie S. Dal punto di vista matematico la (1.35) può essere considerata un’equazione integrale equivalente
all’equazione a derivate parziali (1.24). Tuttavia, supposto che la funzione Φ
sia nulla in tutto lo spazio salvo entro una regione V0 di estensione limitata, è
possibile dimostrare che quando la superficie S va all’infinito l’integrazione su
di essa dà contributo nullo. A questo scopo osserviamo che la (1.35), tenuto
conto dell’ipotesi sul comportamento di Φ, può essere scritta nella forma:
ϕ(P )
1 drP Q
1 dϕ(Q)
1
= lim
+ ϕ(Q) 2
S→∞ 4π S
rP Q dn
rP Q dn
Z
1
Φ(Q)
−
dVQ′
4π V0 rP Q
Z
!
dSQ −
(1.36)
Dimostriamo che sostituendo nella (1.36) l’espressione:
ϕ(P ) = −
1
4π
Z
V0
Φ(Q)
dVQ′
rP Q
(1.37)
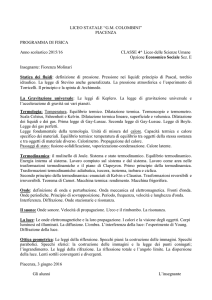
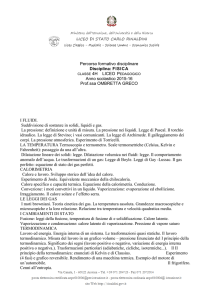
essa risulta identicamente verificata. Infatti, indicando con O un’origine
arbitraria interna al volume V0 , come indicato in figura 1.2, ed applicando il
teorema di Carnot al triangolo P OQ, la (1.37) può essere scritta nella forma:
ϕ(P ) = −
1
4πrP O
Z
V0
Φ(Q)dVQ′
r
1−
r
2 rQO
PO
cos ϑ +
rQO 2
rP O
(1.38)
14
CAPITOLO 1. EQUAZIONI DI MAXWELL
Figura 1.2:
dove rP O , rQO sono le distanze dei punti P e Q dall’origine e ϑ indica l’angolo
QÔP . Quando il punto P va all’infinito il rapporto rQO /rP O tende a zero e
la (1.38) diventa asintoticamente:
lim ϕ(P ) = −
P →∞
1
4πrP O
Z
V0
Φ(Q)dVQ′
(1.39)
in cui, manifestamente, l’integrale della funzione Φ è una quantità finita. Ne
segue che valgono le equazioni asintotiche:
1
4π
Z
Φ(Q)dVQ′ = −k
(1.40)
dϕ(P ) 2
1
lim
rP O =
P →∞ drP O
4π
Z
Φ(Q)dVQ′ = k
(1.41)
lim ϕ(P ) rP O = −
P →∞
V0
V0
dove k è una costante finita. Possiamo ora valutare il primo integrale che
compare nella (1.36). Assumendo come superficie S una sfera di centro O,
le derivate rispetto alla direzione normale ad S vengono sostituite dalle derivate rispetto a rQO . Di conseguenza, osservando che rP Q e rQO diventano
coincidenti per Q tendente ad infinito e tenendo conto delle (1.40) e (1.41)
(in cui si sostituisca P con Q), i due termini che compaiono nell’integrale in
−3
. Tenendo conto che
questione diventano asintoticamente proporzionali a rQO
2
l’estensione di S cresce proporzionalmente a rQO , ciò basta a concludere che
l’integrale su S calcolato mediante la (1.37), tende a zero (questa conclusione
è rafforzata dal fatto che i due contributi che intervengono nell’integrazione
su S sono eguali in valore assoluto ma opposti in segno).
15
1.1. LE LEGGI DI LAPLACE E COULOMB
Abbiamo pertanto provato che la (1.36) effettivamente si riduce ad
una identità quando in essa si sostituisca la (1.37). Essendo, d’altra parte,
la (1.36) equivalente all’equazione iniziale (1.24), ne segue che l’espressione
(1.37) di ϕ costituisce la soluzione di questa equazione nel caso in cui le
condizioni limitative per la Φ siano verificate. Bisogna osservare che tali condizioni implicano condizioni equivalenti per ~j(Q) e ρ(Q) di cui Φ è funzione;
in pratica si ha che l’equazione (1.24) ammette come soluzione la (1.37) solo
se l’estensione delle sorgenti dei campi statici è limitata, condizione che nella
realtà è sempre verificata e perciò non risulta minimamente limitativa (basti
pensare che in natura non esistono oggetti di dimensioni infinite e pertanto
neppure distribuzioni di correnti o di cariche (stazionarie) infinite!). Inoltre,
confrontando la (1.37) con la (1.35), risulta subito che nella (1.35) l’integrale
su S rappresenta, per un volume V limitato e più piccolo di V0 , il contributo
dovuto ai valori di Φ esterni a V .
Applicando la (1.37) alle componenti della (1.21), si ottiene per il
~
vettore induzione magnetica B:
~ ))i = µ0
(B(P
4π
Z
V0
∇Q × ~j(Q)
rP Q
i
dVQ
(i = 1, 2, 3)
(1.42)
in cui si è indicato con V0 il volume finito occupato dalle correnti (stazionarie)
e ∇Q × indica il rotore calcolato rispetto alle coordinate del punto mobile Q;
la relazione vettoriale è ricavabile immediatamente. Poichè vale la relazione:
!
~j
1
1
∇×
=
∇ × ~j + ∇
× ~j
(1.43)
rP Q
rP Q
rP Q
possiamo scrivere la relazione vettoriale corrispondente alla (1.42) nella forma:
!
Z
~j
µ0
~
B(P ) =
dVQ −
∇Q ×
4π V0
rP Q
!
Z
1
µ0
× ~j(Q)dVQ
(1.44)
∇Q
−
4π V0
rP Q
dove ∇Q indica il gradiente calcolato rispetto alle coordinate del punto mobile
Q. Il primo integrale a secondo membro è nullo; infatti, in conseguenza del
teorema della divergenza, si ha:
Z
V0
∇Q ×
~j
rP Q
!
dVQ =
Z
S′
~n ×
~j
rP Q
!
dSQ′
(1.45)
dove S ′ è la superficie che limita il volume occupato dalla corrente e ~n è
la normale a S ′ diretta verso l’esterno. Poichè S ′ contiene all’interno tutti
16
CAPITOLO 1. EQUAZIONI DI MAXWELL
i punti in cui ~j è diverso da zero, l’integrale (1.45) effettivamente è nullo.
Pertanto la (1.44) diventa:
~ ) = − µ0
B(P
4π
1
!
Z
∇Q
Z
~rP Q ~
~rP Q
µ0 Z ~
j(Q)
×
×
j(Q)dV
=
dVQ
Q
rP3 Q
4π V0
rP3 Q
V0
rP Q
× ~j(Q)dVQ
(1.46)
ovvero:
~ ) = − µ0
B(P
4π
V0
(1.47)
che esprime la prima legge di Laplace per una distribuzione di correnti (stazionarie) in un volume finito V0 con dimensioni trasverse non trascurabili.
Considerando come elemento di volume un tratto di un sottile tubo di flusso,
di lunghezza eguale al vettore infinitesimo d~s parallelo alla densità di corrente ~j e percorso da una corrente di intensità i, la (1.47) può essere scritta
come:
~ ) = µ0 i d~s(Q) × ~rP Q
B(P
4π
rP3 Q
(1.48)
che, integrata sulla lunghezza totale del tubo di flusso, supposto infinito,
fornisce la ben nota legge di Biot-Savart.
Partendo dalla (1.23) è possibile ottenere per il campo elettrico di
~ una espressione di tipo analogo. Infatti, applicando la (1.37) alle
intensità E
componenti della (1.23) si ha:
~ ))i = −
(E(P
1
4πǫ0
Z
V0
(∇Q ρ(Q))i
dVQ
rP Q
(i = 1, 2, 3)
(1.49)
Poichè vale la relazione:
∇Q
ρ(Q)
rP Q
!
= (∇Q ρ(Q))
1
rP Q
+ ρ(Q)∇Q
1
rP Q
!
(1.50)
si può scrivere la relazione vettoriale corrispondente alla (1.49) nella forma:
~ ) = − 1
E(P
4πǫ0
Z
V0
∇Q
!
ρ(Q)
dVQ −
rP Q
Z
V0
ρ(Q)∇Q
1
rP Q
dVQ
!!
(1.51)
Di nuovo, il primo integrale a secondo membro è nullo: infatti, in conseguenza
del teorema della divergenza, si ha:
Z
V0
∇Q
!
Z
ρ(Q)
ρ(Q)
dVQ =
~ndS ′
rP Q
S ′ rP Q
(1.52)
1.1. LE LEGGI DI LAPLACE E COULOMB
17
dove S ′ è la superficie che limita il volume V0 ; per le ipotesi fatte, la densità
di carica su questa superficie e quindi gli integrali che compaiono nei due
membri della (1.52) sono nulli. Si ha pertanto:
~ ) =
E(P
1
4πǫ0
Z
V0
ρ(Q)
~rP Q
dVQ
rP3 Q
(1.53)
che è l’espressione della legge di Coulomb per una distribuzione di cariche
(stazionarie) estesa nel volume finito V0 . Considerando la carica infinitesima
contenuta in un elemento di volume dVQ :
dq(Q) = ρ(Q) dVQ
(1.54)
il contributo all’intensità del campo elettrico dovuto ad essa sarà:
~ ) =
dE(P
~rP Q
1
dq 3
4πǫ0
rP Q
(1.55)
Capitolo 2
Potenziali E.M.
2.1
Potenziale vettore e potenziale scalare
~ e B,
~ in funzione del posto e
Le EqM nel vuoto permettono di calcolare E
del tempo, quando siano note le distribuzioni di ρ e di ~j. Appare comunque
~ e B
~ (6 funzioni, le componenti) a partire
chiaro che la descrizione con E
da quattro funzioni (le componenti di ~j e ρ) è ridondante, ed è possibile
effettuare una riduzione. A questo scopo, osservando che la divergenza di un
rotore è identicamente nulla (∇ · ∇ × ~v = 0, ~v vettore qualsiasi) e che tale
~ poniamo:
è pure, per la (1.2), la divergenza di B,
~ = ∇×A
~
B
(2.1)
~ è un vettore, funzione del posto e del tempo, detto potenziale vettore.
dove A
Sostituendo la (2.1) nella (1.3) e scambiando l’ordine delle derivate temporali
e spaziali si ottiene:
~
~ + ∂A = 0
∇ × E
∂t
(2.2)
Tenendo conto che il rotore di un gradiente è identicamente nullo
(∇ × ∇ s = 0, s scalare qualsiasi), poniamo:
~
~ + ∂A = − ∇ V
E
∂t
(2.3)
dove V è una funzione del posto e del tempo, detta potenziale scalare. Il
campo E.M. risulta cosı̀ espresso mediante la (2.1) e la (2.3), riscritta come:
~
~ = − ∇ V − ∂A
E
∂t
(2.4)
18
2.1. POTENZIALE VETTORE E POTENZIALE SCALARE
19
In esse intervengono solo quattro funzioni scalari, ossia V e le tre
~ Si deve però notare che la scelta dei potenziali A
~ e V
componenti di A.
non è univoca. Infatti, indicata con A~0 e V0 una determinazione dei potenziali soddisfacente le (2.1) e (2.4), si verifica immediatamente che anche i
potenziali:
~ = A~0 + ∇ φ
A
V = V0 −
(2.5)
∂φ
∂t
(2.6)
dove φ è una arbitraria funzione del posto e del tempo, soddisfano queste
equazioni. La trasformazione rappresentata dalle (2.5) e (2.4) prende il nome
~ e
di trasformazione di gauge: essa lascia invariate le espressioni dei campi E
~
B
~ e V. A
Determiniamo ora le equazioni cui obbediscono i potenziali A
questo scopo sostituiamo le (2.1) e (2.4) nella (1.4); si ottiene:
~
∂
∂2A
~
∇ × ∇ × A + ǫ0 µ0 ∇ V + ǫ0 µ0 2 = µ0~j
∂t
∂t
(2.7)
Utilizzando l’identità
~ = ∇∇ · A
~ − ∇2 A
~
∇× ∇× A
(2.8)
la (2.7) diventa:
2 ~
~ + 1∂V
~ − 1 ∂ A = −µ0~j + ∇ ∇ · A
∇A
2
2
c ∂t
c2 ∂t
2
!
(2.9)
Analogamente, sostituendo la (2.4) nella (1.1) abbiamo:
∇2 V +
∂
~ = −ρ
∇ · A
∂t
ǫ0
(2.10)
È possibile dare a queste equazioni una forma più compatta approfittando
della arbitrarietà della funzione φ. Supponiamo, infatti, di scegliere φ in
modo che
~ + 1∂V = 0
∇ · A
c2 ∂t
(2.11)
ossia, come si vede subito usando le (2.5) e (2.6):
1 ∂2 φ
∇φ − 2 2 = −
c ∂t
2
~ 0 + 1 ∂ V0
∇ · A
c2 ∂t
!
(2.12)
20
CAPITOLO 2. POTENZIALI E.M.
In questo modo, mediante la (2.12), che viene detta condizione di gauge di
Lorentz, le equazioni per i potenziali diventano semplicemente:
~ −
∇2 A
~
1 ∂2 A
= − µ0~j
c2 ∂t2
(2.13)
∇2 V −
ρ
1 ∂2 V
= −
2
2
c ∂t
ǫ0
(2.14)
Esse, tenendo conto della (2.1) e della (2.4), della condizione di gauge di
Lorentz e delle condizioni al contorno, ci permettono di determinare il campo
E.M. in funzione delle cariche e delle correnti. Sovente, per semplificare le
notazioni, si fa uso del simbolo
1 ∂2
(2.15)
c2 ∂t2
esso prende il nome di operatore D’Alambertiano. Le equazioni (2.12), (2.13)
e (2.14) assumono cosı̀ la forma:
2 = ∇2 −
~ 0 + 1 ∂ V0
2φ = − ∇ · A
c2 ∂t
!
(2.16)
~ = − µ0~j
2A
2V = −
(2.17)
ρ
ǫ0
(2.18)
È importante rilevare che la condizione di gauge di Lorentz implica la
validità della fondamentale equazione di continuità:
∂ρ
= 0
(2.19)
∇ · ~j +
∂t
che esprime il fondamentale e basilare concetto che la carica è conservata. Infatti applicando alla (2.17) l’operatore ∇· e sommando con la (2.18) derivata
rispetto a c2 t, si ottiene:
~ + 1∂V
0 = 2 ∇·A
c2 ∂t
!
= −µ0
∂ρ
∇ · ~j +
∂t
!
(2.20)
Ciò significa, in altri termini, che il legame esistente tra le soluzioni (2.17) e
(2.18) corrisponde a quello che intercorre tra ~j e ρ.
Si può notare che a partire dalle quattro funzioni che descrivono le
tre componenti di ~j e ρ si ottengono, tramite le (2.17) e (2.18), altre quattro
~ e V ). Le (2.1) e (2.4) forniscono il legame
funzioni (le tre componenti di A
~ eB
~ che sono i campi fisici misurabili.
con E
2.2. SUPERPOTENZIALE DI HERTZ
2.2
21
Superpotenziale di Hertz
Nelle applicazioni si può utilizzare la (2.19) per evitare di integrare l’equa~ dalla (2.17) e
zione per il potenziale scalare V . Per fare ciò basta ricavare A
calcolarne la divergenza, dopodichè la (2.11), con una integrazione rispetto
al tempo, ci fornisce, a meno di una costante dipendente dal posto, il valore di V . All’atto pratico questa costante può, di solito, essere determinata
senza difficoltà; è tuttavia preferibile seguire un differente procedimento che,
anche a priori, non dà luogo ad alcuna ambiguità. In altre parole, si cerca
di ottenere una ulteriore riduzione del numero di funzioni che descrivono le
sorgenti (3 anzichè 4) e di componenti dei campi generati.
~ funzione del posto e del
A questo scopo introduciamo un vettore Q,
tempo, tale che:
~
~j = ∂ Q
∂t
(2.21)
~
ρ = −∇ · Q
(2.22)
e
Si constata immediatamente che la forma di queste equazioni garantisce la
~
validità dell’equazione di continuità (2.19), qualunque sia Q.
Poniamo ora:
~
~ = 1∂Z
A
c2 ∂t
(2.23)
~
V = −∇ · Z
(2.24)
~ è un vettore da determinarsi, detto vettore (o superpotenziale) di
dove Z
Hertz. Sostituendo le (2.21) e (2.23) nella (2.17) si ha:
~
1 ∂ ~
Q
= 0
2
Z
+
c2 ∂t
ǫ0
(2.25)
Analogamente, sostituendo le (2.22) e (2.24) nella (2.18) si ottiene:
~
~ + Q = 0
∇ · 2Z
ǫ0
(2.26)
~ tale da verificare l’equazione:
Basta pertanto assumere Z
~ = −
2Z
~
Q
ǫ0
(2.27)
22
CAPITOLO 2. POTENZIALI E.M.
perchè le (2.17) e (2.18) siano a loro volta verificate. Partendo dall’espres~ si può ottenere, mediante successive derivazioni, il campo E.M.;
sione di Z
è da notare che la condizione di gauge di Lorentz è immediata conseguenza
~ risulta:
della forma delle (2.23) e (2.24). L’espressione per B
~ = 1 ∂ ∇×Z
~
B
c2 ∂t
(2.28)
~ con qualche trasformazione e mediante la
e quella del campo elettrico E,
(2.27):
~
E
=
=
~
~
1 ∂2Z
1 ∂2Z
2~
~
~
∇∇ · Z − 2 2 = ∇ × ∇ × Z + ∇ Z − 2 2 =
c ∂t
c ∂t
~
Q
~ + 2Z
~ = ∇×∇×Z
~ −
(2.29)
∇×∇×Z
ǫ0
~ in tutti i punti dello spazio in cui Q
~ = 0.
che si riduce a ∇ × ∇ × Z
2.3. CALCOLO DEI POTENZIALI CON IL METODO DI GREEN
2.3
23
Calcolo dei Potenziali con il metodo di
Green
~ e
Occorre ora sviluppare un metodo che permetta di valutare i potenziali A
~ A questo scopo osserviamo che l’equazione
V oppure il vettore di Hertz Z.
(2.14), le tre componenti della (2.13), la (2.12) e le componenti della (2.27)
sono della forma:
2f = ∇2 f −
1 ∂2f
= F (x, y, z, t)
c2 ∂t2
(2.30)
Per integrare una equazione di questo tipo si può utilizzare un metodo che
si basa sulla applicazione del lemma di Green (B.13), il che richiede, però, di
eliminare la dipendenza esplicita dalla variabile tempo. A tal fine sviluppiamo in serie di Fourier di forma complessa (cfr. appendice D) le funzioni f e
F , nell’ ipotesi che esse siano funzioni periodiche del tempo con periodo T e
pulsazione ω = 2π/T , altrimenti si potrà eseguire uno sviluppo in integrali
di Fourier e procedere poi in modo analogo a quanto fatto nel seguito:
F (x, y, z, t) =
+∞
X
Φs (x, y, z)e(−iωs t)
(2.31)
ϕs (x, y, z)e(−iωs t)
(2.32)
−∞
f (x, y, z, t) =
+∞
X
−∞
nelle quali si è posto ωs = s ω. Sostituendo nella (2.30) abbiamo:
+∞
Xh
i
∇2 ϕs + ks2 ϕs − Φs e(−iωs t) = 0
−∞
(2.33)
dove si è posto:
ωs
= ks
c
(2.34)
La (2.33) è verificata se valgono le equazioni:
∇2 ϕs + ks2 ϕs = Φs
(2.35)
Quando ks vale zero esse si riducono alla (1.24), già incontrata nel paragrafo 1.1; generalizziamo pertanto il procedimento allora usato. Consideriamo
questa volta la funzione:
gs (r) =
e(iks r)
r
(2.36)
24
CAPITOLO 2. POTENZIALI E.M.
dove r è la distanza dal punto P (x, y, z) in cui si vuole determinare il valore della funzione ϕs . Usando l’espressione dell’operatore laplaciano in
coordinate polari, C.9:
1 ∂
∂
∇2 = 2
r2
r ∂r
∂r
!
1
∂
∂
+ 2
sin θ
r sin θ ∂θ
∂θ
!
+
∂2
1
(2.37)
r 2 sin2 θ ∂ϕ2
si verifica subito che gs è un integrale particolare dell’equazione:
∇2 gs + ks2 gs = 0
(2.38)
Poichè, come già la funzione g dell’equazione (1.25), anche gs è singolare
in P usiamo per applicare il lemma di Green lo stesso volume scelto per la
(1.24), cioè il volume V ∗ compreso entro una superficie chiusa S contenente
all’interno il punto P ed una seconda superficie sferica S0 , di raggio molto
piccolo, ǫ, con centro nel punto P stesso (vedi figura 1.1). Si ha in questo
modo:
Z
V∗
2
2
gs ∇ ϕs − ϕs ∇ gs dV
!
dgs
dϕs
dS0 +
− ϕs
=
gs
dn
dn
S0
!
Z
dgs
dϕs
dS
(2.39)
− ϕs
gs
dn
dn
S
Z
Usando le equazioni (2.35) e (2.38) l’integrale a primo membro diventa:
Z
V∗
2
2
gs ∇ ϕs − ϕs ∇ gs dV =
Z
V∗
gs Φs dV
(2.40)
Trasformiamo ora il primo integrale a secondo membro della (2.39); tenendo
conto che sulla superficie S0 la derivata normale coincide, salvo il segno, con
la derivata rispetto a r, si ottiene:
!
dϕs
dgs
gs
dS0 = −
− ϕs
dn
dn
Z
S0
Z
S0
(iks r)
e
"
1
iks
1 dϕs
− ϕs
− 2
r dr
r
r
!#
dS0 (2.41)
ϕ̄s
Introduciamo i valori medi ϕ̄s e ddr
e facciamo tendere a zero ǫ; la (2.41)
analogamente alla (1.34) si riduce a:
Z
S0
lim
Z
ǫ→0 S0
!
dϕs
dgs
gs
dS0
− ϕs
dn
dn
!
dgs
dϕs
dS0
− ϕs
gs
dn
dn
2 (iks ǫ)
= −4πǫ e
=
−4πϕs (P )
1 dϕ̄s
iks
1
− ϕ̄s (
− 2)
ǫ dr
ǫ
ǫ
!
(2.42)
Sostituendo le (2.40) e (2.42) nella (2.39) ed osservando che per ǫ tendente a
zero il volume V ∗ coincide con l’intero volume V (escluso il punto P ) interno
ad S abbiamo:
2.3. CALCOLO DEI POTENZIALI CON IL METODO DI GREEN
1
ϕs (P ) =
4π
!
25
dϕs
1
dgs
gs
dS −
− ϕs
gs Φs dV
dn
dn
4π V
S
#
!
"
1 Z (iks r) 1 dϕs
1 dr
iks
=
dS −
− ϕs
− 2
e
4π S
r dn
r
r dn
Z
1
−
4π
Z
V
Z
e(iks r)
Φs dV
r
(2.43)
dove è stata inserita l’espressione (2.36) della funzione gs . Risulta cosı̀ determinata anche la funzione f ; per ricavarla in modo esplicito, sostituiamo
la (2.43) nella (2.32) ed eliminiamo ks mediante la (2.34). Si trova:
f (P, t) =
+∞
X
ϕs e−iωs t =
−∞
"
1
4π
Z +∞
X
S −∞
1
iωs
1 dϕs
− ϕs
− 2
·
r dn
cr
r
1
4π
Z +∞
X
V
e−iωs (t −
r
−∞
e−iωs (t
− r/c)
#
dr
dS −
dn
r/c)
Φs dV
(2.44)
Notiamo ora che, esprimendo la (2.32) all’istante t − r/c anzichè all’istante
t, si ottiene:
f (P, t − r/c) =
+∞
X
ϕs (P ) e−iωs (t
− r/c)
(2.45)
−∞
e analogamente la derivata di f calcolata all’istante t − r/c diventa:
∂f
∂t
!
= −
t−r/c
+∞
X
ϕs (P ) i ωs e−iωs (t
− r/c)
(2.46)
−∞
Infine, considerando sempre allo stesso istante la funzione F , si ha:
F (P, t − r/c) =
+∞
X
Φs (P ) e−iωs (t
− r/c)
(2.47)
−∞
Mediante la (2.45), l’equazione da essa ottenuta derivata rispetto a n e le
(2.46), (2.47), l’espressione (2.44) della funzione f assume la forma:
1
f (P, t) =
4π
Z "
1
1 df
1 ∂f
+
+ 2f
cr ∂t
r
S r dn
Z
1
1
−
Ft − r/c dV
4π V r
!
dr
dn
#
dS −
t−r/c
(2.48)
26
CAPITOLO 2. POTENZIALI E.M.
Questa relazione, dovuta a Kirchhoff, determina il valore del campo f nel
punto P e all’istante t mediante i valori che questa funzione e le sue derivate
assumono sulla superficie S, oltrechè mediante i valori di F (le sorgenti) nel
volume interno ad S. Tutte queste quantità devono, però, essere valutate
all’istante antecedente t − r/c. In altre parole, il valore di f (P, t) dipende
con il ritardo r/c dalla situazione sulla superficie S e nel volume V . Tenendo
conto che r è la distanza tra P e il punto variabile nelle integrazioni in questi
domini, ne segue l’importante risultato che la funzione f si propaga con
velocità c.
Consideriamo ora due casi estremi, ma molto istruttivi e quasi sempre
utilizzati in pratica, della formula di Kirchhoff.
1. Supponiamo che la superficie S sia all’infinito e quindi V diventi tutto
lo spazio. Nessun campo può percorrere lo spazio tra S e il punto
P considerato in un tempo finito e quindi l’integrale di superficie si
annulla. In tale caso la (2.48) fornisce, nel punto P la relazione:
1 Z F (Q, t − rP Q /c)
f (P, t) = −
dVQ
4π V
rP Q
(2.49)
Ricordando che avevamo indicato genericamente con f le funzioni descriventi i potenziali e con F le sorgenti, possiamo esplicitare le relazioni
~ V e Z:
~
finali per A,
µ0
~
A(P,
t) =
4π
Z
V
~j(Q, t − rP Q /c)
dVQ
rP Q
(2.50)
1
V (P, t) =
4πǫ0
Z
V
ρ(Q, t − rP Q /c)
dVQ
rP Q
(2.51)
1
4πǫ0
Z
V
~
Q(Q,
t − rP Q /c)
dVQ
rP Q
(2.52)
~
Z(P,
t) =
~ eB
~ tramite le (2.3), (2.29),
dalle quali è possibile risalire ai campi E
(2.1) e (2.28) rispettivamente.
2. Supponiamo che nel volume V non ci siano sorgenti. Allora la (2.48)
si riduce a:
1
f (P, t) =
4π
Z "
S
1 df
+
r dn
1
1 ∂f
+ 2f
cr ∂t
r
!
dr
dn
#
dS
t−r/c
(2.53)
2.3. CALCOLO DEI POTENZIALI CON IL METODO DI GREEN
27
Ma, in assenza di sorgenti, sappiamo che le EqM forniscono le equazioni
delle onde libere, e la (2.53) sarà la soluzione quando siano dati i valori
df
di f , dn
e ∂f
in funzione del tempo e per tutti i punti della superficie
∂t
S.
La (2.53) è una giustificazione rigorosa a posteriori del principio di
Huygens–Fresnel, proposto in modo del tutto empirico e con prescrizioni non corrette. Essa mostra, infatti, come l’ idea che sta alla base di
questo principio, vale a dire quella di considerare ogni punto di una superficie d’ onda come sorgente di nuove onde e sostituire queste sorgenti
secondarie alle sorgenti reali, sia sostanzialmente giusta; mette però anche in evidenza come la prescrizione per l’ applicazione del principio di
Huygens–Fresnel sia basata su un postulato non vero e cioè che le onde
elementari secondarie partano dai vari punti della superficie S con la
stessa fase e con ampiezza decrescente al crescere dell’ angolo θ fra la direzione considerata e la normale a dS (fino ad annullarsi per θ ≥ π/2).
La (2.53) può, dunque essere considerata come la formulazione corretta
di quel famoso principio.
Capitolo 3
L’energia del campo
elettromagnetico.
3.1
Il vettore di Poynting
Dimostreremo ora che il campo E.M. possiede dell’energia; precisamente, faremo vedere che è possibile associare al campo esistente in un dato volume V
~ eB
~ e dall’estenuna quantità di energia che risulta dipendente dai valori di E
sione di V . Per far questo consideriamo un sistema di N cariche puntiformi
sottoposte all’azione del campo E.M. da esse stesse generato. Tenendo conto
della espressione della forza di Lorentz che agisce sulla carica i–esima
~ + ~vi × B)
~
F~i = qi (E
(3.1)
il lavoro fatto dal campo sull’i–esima carica nel tempo dt è:
dLi
= F~i · d~si = F~i · ~vi dt =
~ + ~vi × B)
~ · ~vi dt =
= qi (E
~ · ~vi dt
= qi E
(3.2)
Il lavoro totale risulta pertanto:
dL =
N
X
~ · ~vi dt
qi E
(3.3)
i=1
Dividiamo il volume V in un numero molto grande di volumetti ∆Vj , ciascuno attorno ad un punto Pj , e indichiamo con n(∆Vj ) il numero di cariche
contenute in ciascuno di essi; ricordando la definizione di densità di corrente
28
29
3.1. IL VETTORE DI POYNTING
(1.14) si ottiene:
dL
X n(∆V
Xj )
=
∆Vj
X
=
dLi
i=1
~ j) ·
∆Vj E(P
∆Vj
i=1
qi ~vi
∆Vj
dt
~ j ) · ~j(Pj ) dt
∆Vj E(P
X
=
Pn(∆Vj )
(3.4)
∆Vj
Ne segue che la (3.4) può essere scritta nella forma:
dL =
Z
~ · ~j dV dt
E
(3.5)
V
Questa equazione, d’altra parte, purchè si tenga conto della definizione (1.15)
di ~j, è valida anche per una distribuzione discreta. Eliminando ~j mediante
la (1.4), la (3.5) diventa:
1
dL
=
dt
µ0
Z
V
~ · ∇×B
~ dV − ǫ0
E
Z
V
~
~ · ∂ E dV
E
∂t
(3.6)
Sostituendo nella (3.6) l’identità (A.26):
~ × B)
~ = B
~ ·∇×E
~ − E
~ ·∇×B
~
∇ · (E
(3.7)
si ha:
dL
dt
1
µ0
~ × B)
~ dV + 1
∇ · (E
µ0
V
Z
~
~ · ∂ E dV
−ǫ0
E
∂t
V
= −
Z
Z
~ ·∇×E
~ dV −
B
V
(3.8)
~
ossia, applicando il teorema della divergenza (B.10) ed eliminando ∇ × E
tramite la (1.3):
dL
dt
1
µ0
~ × B)
~ · ~n dS − 1
(E
µ0
S
Z
~
~ · ∂ E dV
−ǫ0
E
∂t
V
= −
Z
Z
V
~
~ · ∂ B dV −
B
∂t
(3.9)
dove S è la superficie che limita il volume V e ~n è la normale ad S orientata
all’esterno di V . Introducendo il vettore:
~ × B)
~ = c2 ǫ0 (E
~ × B)
~
~ = 1 (E
(3.10)
S
µ0
30 CAPITOLO 3. L’ENERGIA DEL CAMPO ELETTROMAGNETICO.
la (3.9) assume la forma:
dL
= −
dt
~ · ~n dS − ǫ0 d
S
2 dt
S
Z
Z
~ 2 + c2 B
~ 2 ) dV
(E
(3.11)
V
Si badi che nel prodotto esterno a secondo membro della (3.10) compare il
~ pur
vettore induzione magnetica, che è un vettore assiale; di conseguenza S,
essendo definito mediante un prodotto esterno, è un vettore polare. Esso
prende il nome di vettore di Poynting. Trasformiamo ulteriormente l’equazione (3.11); osservando che il lavoro del campo è esprimibile mediante il
teorema dell’energia cinetica, ossia con l’equazione:
N
d X
1
dL
=
mi~vi2
dt
dt i=1 2
(3.12)
dove si è indicata con mi la massa della carica i−esima e con ~vi la sua velocità,
si ottiene infine:
N
d X
1
mi~vi2 +
dt i=1 2
Z
V
~ 2 + c2 B
~ 2)
ǫ0 (E
dV = −
2
Z
S
~ · ~n dS
S
(3.13)
Per chiarire il risultato testè ottenuto, supponiamo che le N cariche
siano tutte contenute in una parte limitata del volume V . Ammettiamo,
inoltre, che il loro movimento sia tale che ~j e ρ rimangano costanti nel tempo
fino ad un determinato istante t0 dopo il quale essi iniziano a variare e quindi
a generare un campo propagativo. Se si suppone il volume V illimitato, e
quindi la superficie S situata a distanza infinita dalla zona occupata dalle
cariche, è ovvio che su di essa il contributo del campo propagativo è nullo.
Esso, infatti, nel tempo t − t0 percorre la distanza finita c(t − t0 ) e non
arriva a raggiungere S. Ciò non accade per il contributo del campo statico;
tuttavia, essendosi ammesso che la distribuzione di cariche e correnti occupi
~ che B
~ decrescono almeno come 1/r 2 ed il vettore
un volume limitato, sia E
~ di conseguenza, almeno come 1/r 4 , r essendo la distanza da un generico
S,
punto interno alla distribuzione di carica. Poichè l’estensione della superficie,
invece, aumenta secondo r 2 , si conclude che anche il contributo del campo
statico è nullo e che l’integrale a secondo membro della (3.13), quando V
tende ad infinito, vale zero. Ne segue perciò:
N
X
1
mi~vi2 +
2
i=1
Z
V
~ 2 + c2 B
~ 2)
ǫ0 (E
dV = cost
2
(3.14)
Non è difficile stabilire il significato fisico di questa equazione; a questo
scopo supponiamo dapprima che gli N oggetti non posseggano carica elettrica
3.1. IL VETTORE DI POYNTING
31
e che quindi il campo E.M. sia nullo. In queste condizioni l’energia del
sistema si riduce alla sola energia cinetica, ed essa, come risulta dalla (3.14)
~ =B
~ = 0, si conserva costante nel tempo. In presenza di cariche,
ponendovi E
invece, interviene anche il termine dipendente dal campo E.M. ed esso forma
con l’energia cinetica una quantità costante. È dunque ovvio concludere
che questo termine rappresenta l’energia del campo E.M.. Possiamo, perciò,
introdurre la densità di energia elettromagnetica:
w =
ǫ0 ~ 2
~ 2)
(E + c 2 B
2
(3.15)
Il suo integrale su un volume V rappresenta l’energia associata al campo
contenuto in V ; avremo, cioè, indicando con W questa energia:
W =
Z
V
ǫ0 ~ 2
~ 2 ) dV
(E + c 2 B
2
(3.16)
Quando, invece, V è limitato il primo membro della (3.13) rappresenta la variazione per unità di tempo dell’energia totale contenuta in V ; ad
essa corrisponde, a secondo membro, un flusso di energia uscente attraverso
S. Resta cosı̀ chiarito che il vettore di Poynting rappresenta la densità di
flusso dell’energia E.M.. È utile anche scrivere la (3.13) in modo leggermente
diverso. Per fare questo osserviamo che si ha, inserendo la (3.5) nella (3.11):
Z
Z
d Z
~
~ · ~j dV
−
w dV =
S · ~n dS +
E
dt V
S
V
(3.17)
Questa relazione stabilisce che la diminuzione per unità di tempo dell’energia
E.M. contenuta in V è pari al flusso di energia uscente da V aumentato
della potenza dissipata in V dal campo elettrico. Mediante un procedimento
consueto, utilizzando il teorema della divergenza e la (3.15), la (3.17) può
essere sostituita dalla relazione differenziale equivalente:
~ · ~j
~ + ∂w = −E
∇·S
∂t
(3.18)
La (3.18) è formalmente analoga all’equazione di continuità delle cariche
e delle correnti, salvo la presenza, a secondo membro, di un termine che
rappresenta una “sorgente”, eventualmente negativa, di energia E.M..
32 CAPITOLO 3. L’ENERGIA DEL CAMPO ELETTROMAGNETICO.
3.2
Il tensore degli sforzi elettromagnetici
Abbiamo stabilito nel paragrafo precedente che il vettore di Poynting rappresenta il flusso dell’energia E.M.; dimostreremo ora, nel presente e nel successivo paragrafo, che al flusso di energia è associata una quantità di moto.
A questo scopo consideriamo un sistema di cariche contenute in un volume
finito V ; assumendo che le cariche formino una distribuzione continua, la
forza E.M. che agisce su di esse è data dalla forza di Lorentz, che può essere
scritta come:
f~ =
Z ~ + ~j × B
~
ρE
V
dV
(3.19)
Eliminando da questa equazione ρ e ~j per mezzo delle (1.1) e (1.4), si ottiene:
f~ =
Z
V
~
~ ∇·E
~ + 1 ∇×B
~ − ǫ0 ∂ E × B
~ dV
ǫ0 E
µ0
∂t
(3.20)
~
L’espressione sotto integrale può essere trasformata in modo che in essa E
~ figurino simmetricamente. Per fare ciò basta aggiungere all’integrando
eB
~ e vettorialmente
le equazioni omogenee (1.2) e (1.3) moltiplicate per 1/µ0 B
~ Si ottiene:
per ǫ0 E.
f~
=
Z
V
+
+
~ ∇·E
~ + c2 B∇
~ ·B
~
ǫ0 E
Z
V
Z
V
dV +
~ ×E
~ + c2 ∇ × B
~ ×B
~
ǫ0 ∇ × E
−ǫ0
dV +
~
~
∂E
~ + ǫ0 ∂ B × E
~ dV
×B
∂t
∂t
(3.21)
~ si ricava:
Ricordando la definizione (3.10) di S
f~
=
Z
V
Z
V
~ ∇·E
~ + ∇×E
~ ×E
~
ǫ0 E
~ ∇·B
~ + ∇×B
~ ×B
~
ǫ0 c2 B
dV +
dV −
1 d
~ dV
S
(3.22)
c2 dt V
Per trasformare ulteriormente i primi due integrali osserviamo che, per la
~ vale l’identità:
componente x del termine dipendente da E,
−
h
Z
~ ∇·E
~ + ∇×E
~ ×E
~
E
i
x
=
∂ 1 2
Ex − Ey2 − Ez2
+
∂x 2
∂
∂
+ (Ex Ey ) +
(Ex Ez )
(3.23)
∂y
∂z
33
3.2. IL TENSORE DEGLI SFORZI ELETTROMAGNETICI
per le rimanenti componenti possono essere scritte delle relazioni analoghe, ottenibili dalla precedente con permutazioni circolare degli indici. Di
conseguenza ponendo:
ǫ0 2
ǫ0 c2 2
Ex − Ey2 − Ez2 +
Bx − By2 − Bz2 = −Txx
2
2
2 ǫ
ǫ0 2
0c
Ey − Ez2 − Ex2 +
By2 − Bz2 − Bx2 = −Tyy
2
2
2 ǫ
ǫ0 2
0c
2
2
Ez − Ex − Ey +
Bz2 − Bx2 − By2 = −Tzz
2
2
(3.24)
ǫ0 Ex Ey + ǫ0 c2 Bx By = −Txy = −Tyx
ǫ0 Ex Ez + ǫ0 c2 Bx Bz = −Txz = −Tzx
ǫ0 Ey Ez + ǫ0 c2 By Bz = −Tyz = −Tzy
(3.25)
e tenendo conto che delle relazioni analoghe alla (3.23) possono essere scritte
~ nella (3.22), si trova:
per le componenti del termine dipendente da B
h
~ ∇·E
~ + ∇×E
~ ×E
~ + c2 B
~ ∇·B
~ + ∇×B
~ ×B
~
ǫ0 E
i
x
=
!
∂Txx
∂Txy
∂Txz
= −
(3.26)
+
+
∂x
∂y
∂z
Corrispondenti relazioni valgono per le componenti y e z. La componente x
della forza di Lorentz f~ diventa pertanto:
fx = −
∂Txx
∂Txy
∂Txz
+
+
∂x
∂y
∂z
Z
V
1 d
− 2
c dt
Z
V
!
dV −
Sx dV
(3.27)
da essa, utilizzando il teorema della divergenza, si ha:
fx = −
Z
S
(Txx nx + Txy ny + Txz nz ) dS −
1 d
− 2
c dt
Z
V
Sx dV
(3.28)
dove S è la superficie che limita il volume V ; analogamente per fy e fz .
Le nove quantità Txx , Txy , ..., costituiscono le componenti di un tensore
simmetrico di rango 2 (cfr. appendice E). Ciò è provato dal fatto che la
34 CAPITOLO 3. L’ENERGIA DEL CAMPO ELETTROMAGNETICO.
(3.28) e le corrispondenti equazioni per fy , fz , impongono alle tre quanP
tità 3i=1 Tij di trasformarsi come le rispettive componenti di un vettore.
Indicando semplicemente con T questo tensore ed introducendo il vettore:
ϕ
~ = −
Z
S
T · ~n dS
(3.29)
l’espressione finale di f~ è:
d
f~ = ϕ
~ −
dt
Z
V
~
S
dV
c2
(3.30)
Per chiarire il significato fisico dei risultati ora ottenuti è necessaria una analisi che richiede una certa attenzione. A questo scopo consideriamo dapprima
~ non interviene e la (3.30) si
il caso statico in cui il termine dipendente da S
riduce a:
f~ = ϕ
~
(3.31)
Questa eguaglianza stabilisce che la forza E.M. che agisce sulla distribuzione
di carica contenuta nel volume V può essere espressa mediante i valori che
il tensore T assume sulla superficie S che limita V . È da notare che ad un
risultato analogo si arriva nello studio dell’elasticità di un mezzo materiale
continuo; si può infatti dimostrare che le forze elastiche che agiscono sulle
masse contenute in un volume V dipendono dai valori che il cosiddetto tensore
elastico assume sul contorno di V . Per questa ragione T prende il nome di
tensore degli sforzi elettromagnetici o tensore di Maxwell. È da notare che
questa analogia, assieme ad altre, indussero Maxwell ed i fisici contemporanei
a credere nell’esistenza del famigerato etere, un mezzo materiale che “doveva”
esserci per “sostenere” i campi E.M., ma non era rivelabile sperimentalmente.
3.3. QUANTITÀ DI MOTO E.M..
3.3
35
Quantità di moto E.M..
Per stabilire il significato della (3.30) nel caso non statico, introduciamo in
essa la quantità di moto meccanica delle masse contenute nel volume V .
Ponendo:
N
X
~
mi~vi = Q
(3.32)
i=1
in cui la somma è estesa a tutte le masse contenute in V , l’espressione della
forza diventa:
!
N
~
d X
dQ
~
f =
mi~vi =
(3.33)
dt i=1
dt
Ne segue che la (3.30) può essere scritta nella forma:
Z ~
S
d ~
dV = ϕ
Q +
~
dt
V c2
(3.34)
questa equazione stabilisce che agli sforzi E.M. applicati alla superficie S
corrisponde la variazione, per unità di tempo, della quantità di moto meccanica delle masse presenti in S aumentata, però, di un termine dipendente
dal campo E.M.. In altre parole l’inerzia del sistema dipende, oltrechè dalle
masse, anche dal campo attraverso la grandezza:
~
S
dV
(3.35)
V c2
essa, per questa ragione, prende il nome di quantità di moto elettromagnetica.
Si riserva, invece, il nome di densità di quantità di moto all’integrando che
compare nella (3.35), cioè alla grandezza:
~ =
G
Z
~g =
~
S
~ ×B
~
= ǫ0 E
c2
(3.36)
È ovvio che la (3.34), applicata ad un volume limitato da una superficie sulla
quale il tensore T sia nullo, stabilisce la conservazione della quantità di moto
complessiva contenuta in questo volume.
Tenendo conto del significato energetico ed inerziale del vettore di
Poynting, è possibile stabilire una importante relazione tra l’energia e la
quantità di moto del campo E.M.. A questo scopo consideriamo un elemento
~ risulta subito, dal secondo membro
di area ∆S ortogonale alla direzione di S;
della (3.13) che l’energia che attraversa ∆S nel tempo ∆t è:
~ | ∆S ∆t
W =|S
(3.37)
36 CAPITOLO 3. L’ENERGIA DEL CAMPO ELETTROMAGNETICO.
D’altra parte avevamo visto nel paragrafo 2.3 che i potenziali e quindi anche
il campo E.M. si propagano con velocità c; di conseguenza nel tempo ∆t la
~ del tratto c∆t. Entro il volupropagazione procederà nella direzione di S
metto c ∆S ∆t, interessato dalla propagazione, è contenuta la quantità di
moto E.M.:
~
~ = S c ∆S ∆t
G
c2
(3.38)
Prendendo il modulo e confrontando con la (3.37) si ottiene subito:
~ |= W
|G
c
(3.39)
che è appunto il risultato cui si voleva arrivare. La relazione (3.39) non trova
~ e
riscontro nel caso meccanico in cui la relazione tra la quantità di moto Q
l’energia cinetica Ecin di una massa in moto con velocità ~v è:
~ =
|Q|
2 Ecin
v
(3.40)
La (3.39) peraltro, stabilisce la corretta relazione tra la quantità di moto
e l’energia di un fotone. Essa, infatti, purchè si assuma l’energia E.M. W
coincidente con quella hν di un singolo quanto, porta alla ben nota relazione
p = hν/c, dove indichiamo con p la quantità di moto del fotone.
È interessante notare che l’equazione (3.39) implica l’esistenza di una
massa associata all’energia E.M.. Infatti il rapporto tra il modulo della
quantità di moto e la velocità c, con cui l’energia E.M. si propaga, risulta
essere:
~ |
W
|G
= 2
c
c
(3.41)
Se, in analogia al caso meccanico, si attribuisce a tale rapporto il significato
di massa inerziale, si avrà:
m=
W
c2
(3.42)
Il risultato ora ottenuto ha valore più che altro euristico, il suo significato e
la sua importanza fisica verranno stabiliti nella teoria della relatività.
Un’altra importante conseguenza della relazione (3.36) è l’esistenza di
una pressione con cui il campo E.M. agisce sugli ostacoli capaci di alterarne
la propagazione. Una esauriente discussione di questo fenomeno richiederebbe, tuttavia, lo studio della propagazione in presenza del mezzo materiale
che costituisce l’ostacolo. Ci limitiamo, per ora, ad assumere l’effetto del
3.3. QUANTITÀ DI MOTO E.M..
37
mezzo materiale sulla propagazione come dato del problema deducendone la
conseguente pressione elettromagnetica.
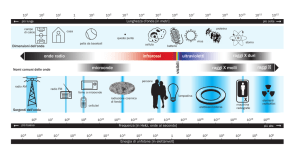
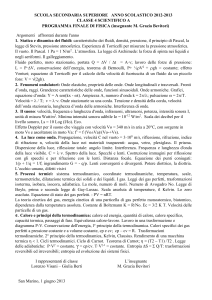
A questo scopo consideriamo, dapprima, il caso in cui l’effetto consiste
nell’assorbimento totale dell’energia E.M.. Supponiamo, inoltre, per semplificare il calcolo, che l’ostacolo sia costituito da un oggetto abbastanza piccolo
da poter supporre, in un volume di estensione paragonabile alle sue dimensioni, il vettore di Poynting costante rispetto al posto. A causa del teorema
~
di conservazione della quantità di moto, la quantità di moto meccanica ∆Q
che l’oggetto acquista nel tempo ∆t deve essere pari a quella persa dal campo
E.M.. Quest’ultima, indicata con ∆S l’area della proiezione dell’oggetto sul
~ (vedi figura 3.1) è data dall’equazione (3.38).
piano ortogonale a S
Figura 3.1:
Si deve avere perciò:
~
S
∆S ∆t
(3.43)
c
D’altra parte, supposto ∆t piccolo a piacere, dalla legge fondamentale della
dinamica si ha:
~ =
∆Q
~ = f~ ∆t
∆Q
(3.44)
dove f~ è la risultante delle forze che agiscono sull’oggetto nell’intervallo di
tempo ∆t. Confrontando le (3.43), (3.44) si ottiene pertanto:
~
S
f~
=
(3.45)
∆S
c
Questa equazione, nel caso in cui la superficie dell’oggetto sia ortogonale a
~ può essere scritta nella forma:
S,
~|
|S
(3.46)
c
la quale determina la pressione della radiazione E.M. su di un ostacolo perfettamente assorbente. Considerando la conservazione della quantità di moto
p =
38 CAPITOLO 3. L’ENERGIA DEL CAMPO ELETTROMAGNETICO.
è immediato capire che la pressione di radiazione vale il doppio nel caso di
un ostacolo perfettamente riflettente, con incidenza normale.
In pratica la pressione E.M., a causa del fattore c che compare a
~ |
denominatore della (3.45) è sempre molto piccola salvo i casi i cui | S
assuma un valore eccezionalmente grande. Ciò accade, ad esempio, all’interno
delle stelle in cui esiste una fortissima pressione di radiazione che interviene
in modo essenziale a determinarne l’equilibrio. Per la radiazione E.M. del
~ | risulta essere circa 2 calorie per
Sole al limite dell’atmosfera terrestre, | S
centimetro quadro e per minuto, pari a 1.4 103 J m−2 s−1 . Mediante la
(3.46) ciò corrisponde ad una pressione di circa 0.5 10−5 Pa (1Pa ≃ 9.868
10−6 atm). Questa pressione, benchè piccola, può dar luogo, nel caso di
oggetti di dimensioni molto ridotte, ad una forza superiore a quella dovuta
alla attrazione gravitazionale del Sole. Infatti, la forza di attrazione del Sole
è | Fa |∝ r 3 , avendo indicato con r il raggio dell’oggetto, supposto sferico,
mentre quella dovuta alla pressione di radiazione è | Fr |∝ r 2 . Il rapporto
Fr /Fa ∝ 1/r e può diventare maggiore di 1 per r sufficientemente piccolo.
Esercizio: Una particella nel sistema solare si trova sottoposta alla
azione combinata della attrazione gravitazionale del Sole e della forza della
radiazione dovuta ai raggi del Sole. Si supponga che la particella sia una sfera
di densità ρ = 103 kg/m3 (ghiaccio, per esempio) e che la radiazione incida
su di essa perpendicolarmente e venga assorbita completamente. Si trovi
il minimo raggio, rC , della particella per cui essa viene espulsa dal sistema
solare.
La forza di attrazione gravitazionale è data da:
~
M mR
F~a = −G
R3
(3.47)
dove G è la costante di gravitazione universale, M è la massa del Sole, m è
~ è la distanza Sole–particella, R il suo modulo;
la massa della particella, R
essa agisce lungo la congiungente Sole–particella ed è diretta verso il Sole. Il
suo modulo può essere espresso come:
Fa = G
M
4 3
ρ
πr
R2 3
(3.48)
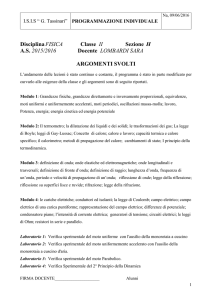
La forza della radiazione agisce lungo la direzione di propagazione delle onde
E.M. emesse dal Sole; queste sono onde sferiche e a, grande distanza, i loro
fronti d’onda possono approssimarsi a dei piani perpendicolari alla direzione
di propagazione (onde piane). La forza della radiazione ha, pertanto, la
3.3. QUANTITÀ DI MOTO E.M..
39
stessa direzione ma verso opposto rispetto alla attrazione gravitazionale; il
suo modulo è:
~|
|S
Fr =
πr 2
(3.49)
c
~ | è il modulo del vettore di Poynting nel punto in cui si trova la
dove | S
particella, cioè a distanza R dal Sole. All’equilibrio:
~|
M
4 3
|S
ρ
πr
=
πr 2
(3.50)
2
R
3
c
da cui si può vedere che l’equilibrio è soddisfatto per particelle con raggio:
G
rC =
~ | 3 R2
|S
c 4ρ G M
(3.51)
Osserviamo che, supponendo che durante la propagazione delle onde non vi
sia assorbimento di energia ad esse associata (o che sia trascurabile), deve
valere la relazione:
Φ(R1 ) = Φ(R2 )
(3.52)
qualunque siano le distanze R1 ed R2 considerate, per la conservazione dell’energia, ovvero:
~ 1 ) | 4πR2 = | S(R
~ 2 ) | 4πR2
| S(R
1
2
(3.53)
da cui si ricava:
~ 1 ) | R12 = | S(R
~ 2 ) | R22
| S(R
(3.54)
Pertanto il raggio critico rC cercato non dipende dalla distanza rispetto al Sole a cui si trova la particella; il valore di rC può essere calcolato, per esempio,
~ | e R al limite dell’atmosfera terrestre:
considerando i valori noti di | S
~|
1.4 103 N
N
|S
=
= 0.47 · 10−5 2
8
2
c
3 10 m
m
(3.55)
6.67 10−11 2.01 1030 m
m
GM
=
= 5.96 103 2
2
2
22
2
R
(1.5) 10
s
s
(3.56)
rC =
~ | 3 R2
|S
= 0.585 10−6 m
c 4ρ G M
(3.57)
Sferette di ghiaccio con raggio inferiore a rC verranno allontanate dal Sole
sotto l’effetto della risultante di Fr − Fa ; resta cosı̀ spiegato il fatto che le
comete rivolgano la coda, formata principalmente da sferette microscopiche
di ghiaccio, sempre nella direzione opposta a quella del Sole.
Capitolo 4
Propagazione di onde E.M. nel
vuoto
4.1
Introduzione
È già stato trattato nel corso di Ottica ed Elettromagnetismo il caso semplice
della propagazione nel vuoto di onde E.M. piane e polarizzate nel caso unidimensionale (propagazione lungo l’asse x, per esempio). Si ricorda in sintesi il
metodo seguito. In assenza di sorgenti (ρ = 0, ~j = 0) le EqM assumono una
~ eB
~ compaiono simmetricamente. Applicando
forma molto semplice, in cui E
l’operatore ∇× alle (1.3) e (1.4) e ricordando la (A.28) si ottengono le due
espressioni:
~ =0
2E
(4.1)
~ =0
2B
(4.2)
e
che si possono riassumere nell’equazione generale:
2f = 0
(4.3)
~ e di B.
~ Nelle ulin cui f indica una qualsiasi delle tre componenti di E
teriori ipotesi che si abbia simmetria piana, e quindi propagazione soltanto
lungo l’asse x (di conseguenza ∂/∂y = ∂/∂z = 0), e che il campo elettri~ sia contenuto soltanto nel piano (x, z) (onda polarizzata, Ey = 0 e
co E
conseguentemente Bz = 0), la (4.3) si riduce a:
∂2f
1 ∂2f
−
= 0
∂x2
c2 ∂t2
(4.4)
40
4.2. TECNICA DI SEPARAZIONE DELLE VARIABILI
41
in cui f rappresenta Ez o By .
L’integrale generale della (4.4) è:
f = a(x − ct) + b(x + ct)
(4.5)
dove a e b sono due funzioni arbitrarie del loro argomento (onde progressive
e onde regressive). È anche noto dall’Analisi che una funzione arbitraria è
esprimibile sotto forma di somma (o integrale) di Fourier (vedi appendice
D), e quindi il caso generale può essere ricondotto allo studio della funzione
sinusoidale:
2π
f (x, t) = f0 sin
(x − ct) + α
(4.6)
λ
o
f (x, t) = f0 sin [(kx − ωt) + α]
(4.7)
avendo posto come al solito k = 2π/λ. Le conseguenze immediate delle
~ eB
~ sono ortogonali e formano una
relazioni precedenti erano che i campi E
terna destrorsa, nell’ordine, in cui il versore ~i dell’asse x è il terzo elemento,
e che E = cB
4.2
4.2.1
Tecnica di separazione delle variabili
Coordinate cartesiane
Per studiare, in casi differenti da quello della simmetria piana, la propagazione di onde E.M. è necessario, innanzitutto, sviluppare un metodo generale
per integrare l’equazione (4.3). Dedichiamo, pertanto, il presente paragrafo alla risoluzione di questo problema matematico. A rigore una soluzione
dell’equazione (4.3) è già nota; si constata, infatti, ponendo F = 0 nelle equazioni (2.30) e (2.48), che la formula di Kirchhoff fornisce la richiesta funzione
f (P, t) sotto forma di un integrale di superficie. Tuttavia, l’applicazione di
questa formula non è all’atto pratico molto opportuna specie quando occorra ottenere f (P, t) in forma esplicita. Pertanto non useremo la formula di
Kirchhoff, ma bensı̀ un procedimento che permette di integrare la (4.3) mediante quattro equazioni alle derivate totali rispettivamente per la variabile
tempo e le tre variabili di posizione. Questo procedimento, che viene detto
per separazione delle variabili, richiede l’uso di coordinate ortogonali; noi lo
svilupperemo, con un certo dettaglio, nel caso delle coordinate cartesiane e
cilindriche.
Consideriamo dunque l’equazione alle derivate parziali (4.3); occorre
determinarne le soluzioni sotto forma di funzioni del posto e del tempo finite
42
CAPITOLO 4. PROPAGAZIONE DI ONDE E.M. NEL VUOTO
e regolari (cioè continue e ad un sol valore) entro il dominio di integrazione
prescelto. Considerando la forma dell’ operatore differenziale che compare
nella (4.3) possiamo osservare che esso può essere decomposto nella somma di
due operatori, uno dei quali, ∇2 , dipende solo dalle coordinate spaziali mentre
∂2
il secondo dipende solo dalla coordinata temporale, ∂t
2 . Questa circostanza
fa sı̀ che la soluzione della (4.3) possa essere scritta in modo fattorizzato,
come prodotto di una funzione dello spazio e di una del tempo, ossia che si
possa applicare la tecnica di separazione delle variabili.
Infatti, riferendoci ad un caso generale, se in una equazione differenziale O(x1 , x2 ) ψ(x1 , x2 ) = k ψ(x1 , x2 ), con k costante, compare un operatore
O(x1 , x2 ) che agisce sulle variabili x1 e x2 e che può essere scritto come
O = O1 (x1 ) + O2 (x2 ), dove gli operatori O1 e O2 agiscono solo sulle variabili
indicate, se la soluzione viene scritta come ψ(x1 , x2 ) = χ(x1 ) φ(x2 ), sostituendo tale soluzione nella equazione di partenza e dividendola per ψ = χ φ
si ottiene l’equazione: χ1 O1 (x1 )χ(x1 )+ φ1 O2 (x2 )φ(x2 ) = k. Affinchè tale equazione sia soddisfatta, e con essa anche l’ equazione di partenza, nell’ ipotesi
che le variabili x1 e x2 siano indipendenti, occorre che, posto k = k1 + k2 ,
siano soddisfatte le due equazioni: χ1 O1 (x1 )χ(x1 ) = k1 e φ1 O2 (x2 )φ(x2 ) = k2 .
Questo riconduce la soluzione della equazione di partenza alla soluzione di
queste due ultime equazioni, dove le derivate che compaiono saranno derivate
totali e perciò la soluzione potrà essere ricondotta a tecniche già note.
Possiamo, dunque, pensare di applicare la separazione delle variabili
alla soluzione della (4.3), sapendo che questa si riduce alla forma generale
qualora si consideri che nel caso specifico, risulta k = 0. Per far ciò cominciamo col decomporre la f nel prodotto di due funzioni rispettivamente del
posto e del tempo, cioè:
f (P, t) = ψ(P ) χ(t)
(4.8)
Sostituendo questa espressione nella (4.3) e dividendo membro a membro per
f , si ottiene:
∇2 ψ
1 d2 χ
c
=
ψ
χ dt2
2
(4.9)
Poichè il primo membro è funzione solo del posto e il secondo solo del tempo,
ciascuno di essi deve essere uguale ad una costante a priori arbitraria, che
verrà indicata con ±ω 2 . È evidente che solo il segno meno è accettabile;
infatti scegliendo il segno positivo, l’equazione:
d2 χ
= +ω 2 χ
dt2
(4.10)
4.2. TECNICA DI SEPARAZIONE DELLE VARIABILI
43
fornisce per il fattore temporale delle funzioni esponenziali variabili monotonicamente, le quali diventano infinite quando la variabile t assume dei valori
positivi o negativi arbitrariamente grandi. Viceversa, la scelta del segno
meno corrisponde a delle funzioni periodiche che, per comodità, scriveremo
mediante esponenziali immaginari, cioè:
−iωt
χω (t) = χ(0)
ω e
(4.11)
dove χ(0)
ω è una costante complessa di scelta arbitraria. Combinando linearmente questa funzione colla complessa coniugata, che verifica pure essa la
(4.3), si possono ottenere delle soluzioni reali fisicamente significative. Oppure, scegliendo un procedimento molto comune in elettromagnetismo, si può
prendere come fattore temporale la parte reale, o il coefficiente dell’unità immaginaria, della soluzione (4.11). In ogni modo, l’equazione per la parte
spaziale diventa:
ω2
ψ = 0
(4.12)
c2
Sostituendo l’integrale ψω della (4.12) e l’espressione (4.11) di χω nella (4.8),
si otterrà un integrale particolare fω dell’equazione (4.3). Sovrapponendo gli
integrali corrispondenti ai vari valori di ω si otterrà, a causa della linearità
della (4.3), l’integrale generale richiesto. In particolare, se le costanti ω formano una progressione aritmetica, la funzione f risulterà espressa mediante
una serie di Fourier.
Occorre ora determinare gli integrali della (4.12). Ciò può essere fatto
abbastanza facilmente se l’operatore laplaciano è espresso mediante coordinate ortogonali; in questo modo, infatti, la (4.12) si decompone in tre equazioni
separate, una per ogni coordinata. Cominciamo dal caso delle coordinate
cartesiane, che fra tutti è il più semplice. Ponendo:
∇2 ψ +
ψ(P ) = X(x) Y (y) Z(z)
(4.13)
e dividendo per ψ, la (4.12) diventa:
1 d2 Y
1 d2 Z
ω2
1 d2 X
+
+
=
−
X dx2
Y dy 2
Z dz 2
c2
(4.14)
Introduciamo tre costanti α, β, γ soddisfacenti alla relazione:
ω2
c2
e consideriamo le equazioni:
α2 + β 2 + γ 2 =
(4.15)
d2 Y
d2 Z
d2 X
2
2
=
−α
X,
=
−β
Y,
= −γ 2 Z
2
2
2
dx
dy
dz
(4.16)
44
CAPITOLO 4. PROPAGAZIONE DI ONDE E.M. NEL VUOTO
i loro integrali, evidentemente, forniscono, se sono sostituiti nella (4.13), un
integrale particolare della (4.12). Procedendo in analogia a quanto fatto in
precedenza per il fattore temporale, gli integrali richiesti possono pertanto
essere scritti nella forma:
(0)
Xα (x) = Xα(0) eiαx , Yβ (y) = Yβ
eiβy , Zγ (z) = Zγ(0) eiγz , (4.17)
Introducendo il vettore:
c
~τ (α, β, γ) = (α~i + β~j + γ~k)
ω
(4.18)
il cui modulo, come risulta dalla (4.15), è unitario, avremo:
(0)
ψα,β,γ = ψα,β,γ ei c ~r·~τ (α,β,γ)
ω
(4.19)
da cui, tenendo conto della (4.8):
(0)
fα,β,γ (x, y, z, t) = fα,β,γ ei c [~r·~τ (α,β,γ)
ω
− ct]
(4.20)
(0)
Nella (4.19) si è indicato con ψα,β,γ il prodotto delle tre costanti che compa(0)
iono a secondo membro nelle (4.17); cosı̀ pure nella (4.20) si è scritto fα,β,γ
(0)
al posto del prodotto ψα,β,γ χ(0)
ω . Si deve tener conto che queste costanti, e
(0)
quindi anche il coefficiente fα,β,γ , sono in generale delle quantità complesse.
La (4.20) rappresenta in forma complessa un’onda piana di tipo sinusoidale
che si propaga lungo la direzione ~τ . È possibile poi, scegliendo diversamente
i segni nelle (4.11) e (4.17), ottenere soluzioni corrispondenti ad onde regressive. Abbiamo cosı̀ riottenuto, col metodo della separazione delle variabili,
il risultato cui eravamo pervenuti nel paragrafo precedente. Tuttavia, nel
caso attuale, la direzione di ~τ non è più fissata in quanto, salvo la condizione
(4.15) che stabilisce l’unitarietà del modulo di ~τ , le costanti α, β, γ sono
arbitrarie. L’integrale generale della (4.3) lo si otterrà, sotto forma di serie
(o di integrale) di Fourier, sommando (o integrando) la (4.20) su tutte le
direzioni di ~τ e su tutti i valori di ω, cioè:
f (x, y, z, t)
=
X
(0)
fα,β,γ ei c [~r·~τ (α,β,γ)
ω
− ct]
α,β,γ
=
X
(0) i c [~
fτ,ω
e r·~τ
ω
− ct]
(4.21)
~
τ ,ω
Evidentemente questa relazione, che rappresenta una propagazione di tipo
qualsiasi come sovrapposizione di onde piane, si riduce al caso particolare
(0)
della simmetria piana quando i coefficienti fα,β,γ con indici β e γ differenti
da zero sono nulli, ossia quando esiste una sola orientazione di ~τ .
4.2. TECNICA DI SEPARAZIONE DELLE VARIABILI
4.2.2
45
Coordinate cilindriche
Consideriamo ora il caso delle coordinate cilindriche. Ponendo:
ψ(P ) = R(r) Φ(ϕ) Z(z)
(4.22)
esplicitando mediante la (C.14) il laplaciano e dividendo membro a membro
per ψ, la (4.12) diventa:
1 d dR
1 d2 Φ
ω2
1 d2 Z
(r ) + 2
+
=
−
rR dr dr
r Φ dϕ2
c2
Z dz 2
(4.23)
Poichè il primo membro dipende solo da r e ϕ mentre il secondo solo da
z, ciascuno dei due membri deve essere costante rispetto alle coordinate;
possiamo perciò separare le variabili ponendo:
1 d2 Z
= −a1
Z dz 2
(4.24)
1 d2 Φ
ω2
1 d dR
(r ) + 2
+
= a1
rR dr dr
r Φ dϕ2
c2
(4.25)
dove a1 è una costante arbitraria. La (4.25) può essere riscritta nella forma:
r d dR
ω2
1 d2 Φ
(r ) + ( 2 − a1 )r 2 = −
R dr dr
c
Φ dϕ2
(4.26)
da cui appare evidente che è ancora possibile separare le variabili r e ϕ
mediante le due equazioni:
1 d2 Φ
= −a2
Φ dϕ2
(4.27)
r d dR
ω2
(r ) + ( 2 − a1 )r 2 = a2
R dr dr
c
(4.28)
dove a2 è un’altra costante arbitraria. L’integrazione della (4.12) è cosı̀ ricondotta a quella delle equazioni (4.24), (4.27) e (4.28), ossia delle equazioni
alle derivate totali:
d2 Z
+ a1 Z = 0
dz 2
(4.29)
d2 Φ
+ a2 Φ = 0
dϕ2
(4.30)
46
CAPITOLO 4. PROPAGAZIONE DI ONDE E.M. NEL VUOTO
d2 R
1 dR
+
+
2
dr
r dr
a2
ω2
− a1 − 2 R = 0
2
c
r
!
(4.31)
Dalla (4.24) otteniamo per la funzione Z una espressione di tipo esponenziale
o periodico a seconda che la costante a1 sia negativa o positiva. Poichè al
crescere del modulo di z la funzione esponenziale diventa nulla o infinita,
essa non è fisicamente accettabile, dato che il valore di ψ deve rimanere
dappertutto finito. Escludendo il caso, non interessante per i nostri scopi, in
cui il dominio di integrazione è limitato, concludiamo che la costante a1 deve
essere scelta positiva. Di conseguenza, ponendo:
a1 = h2
(4.32)
in cui h è una costante reale, di dimensioni pari al reciproco di una lunghezza,
avremo:
(0)
Zh (z) = Zh eihz
(4.33)
Mediante la (4.33) e la sua coniugata, che sono degli integrali particolari,
possiamo costruire l’integrale generale della (4.29).
Considerando la (4.30) è facile vedere che la costante a2 deve essere
scelta uguale al quadrato di un numero intero. In questo caso, infatti, la
funzione Φ avrà carattere periodico con periodo 2π; ciò evidentemente è
richiesto dalla condizione che Φ sia continua per ϕ=0. Ponendo:
a2 = n2
n = 0, 1, 2, .....
(4.34)
otteniamo dalla (4.30) l’integrale particolare:
inϕ
Φn = Φ(0)
n e
(4.35)
dove il fattore costante Φ(0)
n è, come per la (4.33), complesso. L’integrale
generale, anche questa volta, risulterà dalla (4.35) e dalla sua coniugata.
Tenendo conto della (4.32) e della (4.34) e introducendo al posto di r
la variabile ausiliaria:
ξ = r
s
ω2
− h2
c2
(4.36)
l’equazione radiale (4.31) diventa:
d2 R
1 dR
+
+
2
dξ
ξ dξ
n2
1− 2 R = 0
ξ
!
(4.37)
4.2. TECNICA DI SEPARAZIONE DELLE VARIABILI
47
che è l’equazione di Bessel di ordine n (cfr. Appendice F). Essa ammette
due integrali indipendenti, la funzione di Bessel Jn (ξ) e la funzione di Neumann Nn (ξ) 1 . La più generale soluzione della (4.37) sarà quindi esprimibile
mediante una combinazione lineare di queste due funzioni. Per ξ = 0, tuttavia, la funzione di Neumann è infinita; essa non può quindi intervenire per
rappresentare un campo finito per r = 0, cioè lungo l’asse z. Escludendo
questo asse dal dominio di integrazione, possiamo assumere come integrali
indipendenti della (4.37) due combinazioni lineari, di forma complessa, di Jn
e Nn , ossia la funzione:
Hn (ξ) = Jn (ξ) + iNn (ξ)
(4.38)
e la sua coniugata. La forma esplicita di Hn , che prende il nome di funzione
di Hankel, può essere ottenuta mediante le espressioni di Jn e Nn .
Per grandi valori di ξ conviene tuttavia rappresentare le funzioni Jn ,
Nn e Hn mediante i seguenti sviluppi asintotici:
Jn (ξ) ≃
s
Nn (ξ) ≃
s
2
2n + 1
cos ξ −
π
πξ
4
2
2n + 1
sin ξ −
π
πξ
4
Hn (ξ) ≃
s
2 i(ξ
e
πξ
−
2n+1
π
4
(4.39)
)
(4.40)
validi per | ξ |≫ 1 e | ξ |≫ n.
Ricordando l’equazione (4.36), il fattore radiale risulta espresso mediante le funzioni di Hankel nellaforma:
Rω,n,h,α(r) =
(0)
Rω,n,h,α
Hnα r
s
ω2
− h2
c2
(4.41)
In questa relazione si è introdotto un indice α suscettibile di assumere i valori
1 e 2; esso serve a distinguere la funzione Hn dalla sua coniugata.
Riassumendo, ne segue che la funzione f , soluzione generale della
(4.3), è data in coordinate cilindriche dallo sviluppo:
f (r, ϕ, z, t)
=
X
(0)
(0)
(0)
Rω,n,h,α Φ(0)
n Zh χω
ω,n,h,α
s
1
Hnα r
ω2
c2
− h2 ei(nϕ
+ hz − ωt)
(4.42)
Per dettagli sulle funzioni di Bessel si rimanda a testi dedicati; vedi per esempio:
G. N. Watson “A treatise on the theory of Bessel Functions” 2nd edition – Cambridge,
1962
48
CAPITOLO 4. PROPAGAZIONE DI ONDE E.M. NEL VUOTO
(0)
(0)
(0)
Scegliendo opportunamente i valori delle costanti Rω,n,h,α, Φ(0)
n , Zh e χω , la
(4.42) rappresenta, come già accadeva per la (4.21), onde di forma qualsiasi
che si propagano in un dominio esteso a tutto lo spazio salvo l’asse z.
4.3
Propagazione di onde a simmetria cilindrica
Utilizzando i risultati dei paragrafi precedenti, possiamo ora riprendere lo
studio della propagazione delle onde E.M., iniziato con le onde piane. Appare subito che le soluzioni dell’equazione (4.3) assumono una forma particolarmente semplice se si impone alla funzione f (P, t) la simmetria cilindrica.
Infatti, f (P, t) non dipende da ϕ. Supponiamo, dunque, che il fenomeno di
propagazione abbia simmetria cilindrica cioè che sia indipendente dalla coordinata ϕ. Inoltre, supponiamo che esso sia indipendente anche da z. Ciò non
costituisce una sostanziale restrizione; si può facilmente verificare che lungo
la coordinata z la propagazione può avvenire solo sotto forma di onde piane
e ciò attualmente non ha interesse per i nostri scopi. Con queste ipotesi e
usando le coordinate cilindriche, ricordando che:
~ = 1 ∂ (r Er ) + 1 ∂Eϕ + ∂Ez = 0
∇·E
r ∂r
r ∂ϕ
∂z
(4.43)
~ = 0, inoltre:
e analogamente per ∇ · B
!
~ = ~ir 1 ∂Ez − ∂Eϕ +
∇×E
r ∂ϕ
∂z
!
~iϕ ∂Er − ∂Ez +
∂z
∂r
!
1
∂
∂E
r
~iz
=
(r Eϕ ) −
r ∂r
∂ϕ
!
∂Bϕ ~
∂Bz ~
∂Br ~
ir +
iϕ +
iz
−
∂t
∂t
∂t
~ = ǫ0 µ0
e l’analoga per ∇ × B
scritte nella forma:
1 ∂Er
= 0
c2 ∂t
−
∂Bz
1 ∂Eϕ
− 2
= 0
∂r
c ∂t
~
∂E
∂t
(4.44)
(4.45)
le equazioni (1.1)–(1.4) possono essere
(4.46)
(4.47)
4.3. PROPAGAZIONE DI ONDE A SIMMETRIA CILINDRICA
49
1 ∂
1 ∂Ez
(rBϕ ) − 2
= 0
r ∂r
c ∂t
(4.48)
1 ∂
(rEr ) = 0
r ∂r
(4.49)
∂Br
= 0
∂t
(4.50)
−
∂Bϕ
∂Ez
+
= 0
∂r
∂t
(4.51)
1 ∂
∂Bz
(rEϕ ) +
= 0
r ∂r
∂t
(4.52)
1 ∂
(rBr ) = 0
r ∂r
(4.53)
dove Er , Ez , Eϕ sono le componenti cilindriche del campo elettrico e Br , Bz ,
Bϕ quelle del vettore induzione magnetica. Risulta subito da queste equazioni
che Er e Br non possono propagarsi; le (4.46) e (4.50), infatti, stabiliscono
che esse sono costanti nel tempo, le (4.49) e (4.53) che possono variare in
funzione di r solo con legge iperbolica. Noi pertanto, essendo interessati solo
alle componenti che si propagano, assumiamo Er e Br nulle.
Consideriamo ora le equazioni (4.1) e (4.2) ed esprimiamole mediante
~ e B.
~ Tenendo conto che il laplaciano del
le componenti cilindriche di E
campo magnetico è:
2~
∇B
= ~ir
~iϕ
!
Br
2 ∂Bϕ
∇ Br − 2 − 2
+
r
r ∂ϕ
!
2
∂B
B
r
ϕ
+
∇2 Bϕ − 2 + 2
r
r ∂ϕ
2
~iz ∇2 Bz
(4.54)
dove ~ir , ~iϕ , ~iz sono i versori delle linee coordinate, e che vale per il campo
elettrico una relazione analoga, le (4.1) e (4.2) diventano:
1 ∂ ∂Bϕ
1
1 ∂ 2 Bϕ
(r
) − 2 Bϕ − 2
= 0
r ∂r ∂r
r
c ∂t2
(4.55)
1 ∂ ∂Bz
1 ∂ 2 Bz
(r
) − 2
= 0
r ∂r ∂r
c ∂t2
(4.56)
1 ∂ ∂Eϕ
1
1 ∂ 2 Eϕ
(r
) − 2 Eϕ − 2
= 0
r ∂r ∂r
r
c ∂t2
(4.57)
50
CAPITOLO 4. PROPAGAZIONE DI ONDE E.M. NEL VUOTO
1 ∂ ∂Ez
1 ∂ 2 Ez
(r
) − 2
= 0
r ∂r ∂r
c ∂t2
(4.58)
in cui ovviamente è stata considerata solo la dipendenza dalla coordinata
r. Le (4.55) e (4.57) a differenza delle (4.56) e (4.58) non sono della forma
(4.3) e quindi la loro integrazione costituisce un problema non ancora risolto; tuttavia ricavando dalle (4.56) e (4.58) Bz e Ez possiamo sostituirne le
espressioni nelle equazioni del campo ottenendone Eϕ e Bϕ . Ne segue che
l’integrazione delle (4.55) e (4.57) è superflua.
Ponendo nella (4.42) n = 0, h = 0 essa fornisce gli integrali, indipendenti da ϕ e z, delle (4.56) e (4.58); possiamo, inoltre, scegliere le costanti
che intervengono nella (4.42) in modo che:
Bz = 0
(4.59)
e
(1)
Ez = Ez(0) H0 (r
ω −iωt
)e
c
(4.60)
Ciò, evidentemente, equivale a supporre il campo magnetico polarizzato lungo la direzione del versore ~iϕ . Sostituendo la (4.59) nelle (4.47) e (4.52),
risulta che la componente Eϕ è costante rispetto al tempo ed al posto; di
conseguenza, la parte del campo elettrico che si propaga si riduce alla componente Ez . Calcoliamo ora Bϕ ; sostituendo la (4.60) nella (4.51) e tenendo
conto della relazione:
(1)
dH0 (ξ)
(1)
= − H1 (ξ)
dξ
(4.61)
si ha:
−Ez(0)
ω (1) ω −iωt
∂Bϕ
H1 (r ) e
=
c
c
∂t
(4.62)
da cui integrando si ottiene:
1 (0) (1) ω −i(ωt
1
(1) ω
E H1 (r ) e
Bϕ = − Ez(0) H1 (r ) i e−iωt =
c
c
c z
c
+ π/2)
(4.63)
Scegliendo diversamente le costanti nella (4.42) possiamo ottenere, in luogo
delle equazioni (4.60) e (4.63), una seconda soluzione in cui le direzioni del
campo elettrico e magnetico sono scambiate, cioè il campo elettrico è diretto
lungo ~iϕ e quello magnetico lungo ~iz . La combinazione di queste due soluzioni ci permetterebbe di rappresentare il più generale stato di polarizzazione;
la soluzione particolare da noi considerata, tuttavia, è sufficiente per chiarire
4.3. PROPAGAZIONE DI ONDE A SIMMETRIA CILINDRICA
51
Figura 4.1:
le modalità della propagazione con simmetria cilindrica. Essa inoltre è interessante perchè corrisponde al caso in cui il campo magnetico (vedi figura
4.1) è generato da una corrente non stazionaria che percorre un filo rettilineo
illimitato disposto lungo l’asse z. Studiamo, pertanto, le proprietà del campo
E.M. rappresentato dalle (4.60) e (4.63). Per far questo supponiamo che si
abbia:
c
r ≫
(4.64)
ω
ossia che la distanza dall’asse cilindrico sia grande rispetto al tratto percorso
da un’onda E.M. che si propaghi per un tempo 1/ω. Mediante queste ipotesi
e ricordando la (4.40), le (4.60) e (4.63) diventano:
Ez ≃ Ez(0)
Bϕ ≃
s
−Ez(0)
2c i[ω( rc
e
πωr
s
− t) −
r
2
ei[ω( c
cπωr
π
4
]
− t) −
(4.65)
π
4
]
(4.66)
Da queste soluzioni complesse possiamo ottenere quelle reali, fisicamente significative, prendendone la parte reale o il coefficiente dell’unità immaginaria;
possiamo perciò scrivere:
Ez ≃
Bϕ ≃
Ez(0)
s
−Ez(0)
2c
r
π
sin ω( − t) −
πωr
c
4
s
r
π
2
sin ω( − t) −
cπωr
c
4
(4.67)
(4.68)
Queste equazioni stabiliscono che il campo E.M. si propaga con velocità c sotto forma di onde la cui ampiezza decresce al crescere della distanza dall’asse
z.
52
CAPITOLO 4. PROPAGAZIONE DI ONDE E.M. NEL VUOTO
Studiamo ora le proprietà energetiche della propagazione a simmetria
cilindrica; il vettore di Poynting associato alle espressioni asintotiche (4.67)
e (4.68) del campo è:
2
~ = c ǫ0 E (0)
S
πω z
2
r
π ~
2
sin2 ω( − t) −
ir
r
c
4
(4.69)
mentre la corrispondente intensità di radiazione vale pertanto:
I =
ǫ0 c2 Ez(0)
1 ZT ~
| S | dt =
T 0
πωr
2
(4.70)
Risulta cosı̀ che l’energia E.M. si propaga in direzione radiale con densità di
flusso inversamente proporzionale a r. Si vede subito, inoltre, che il flusso
di energia è costante attraverso a tutte le superfici cilindriche con asse z e
altezza h assegnata; si ha infatti:
Z
S
I dS =
Z
0
2π
Z
0
h
I r dϕ dz =
2 ǫ0 c2 h (0)
Ez
ω
2
(4.71)
che è appunto una quantità indipendente da r. Questa equazione può essere
interpretata supponendo che la sorgente di energia sia uniformemente distribuita lungo l’asse z; è ovvio, in tal modo, che il flusso energetico sia costante
attraverso a tutte le superfici S.
Capitolo 5
Irraggiamento di onde E.M.
5.1
Introduzione
Iniziamo in questo paragrafo lo studio dell’emissione di onde E.M. da parte
di distribuzioni non stazionarie di cariche e correnti. Questo studio completerà i risultati del capitolo 4 in cui abbiamo trattato la propagazione del
campo indipendentemente dalle sue sorgenti. Come primo caso concreto per
sviluppare i nostri calcoli, consideriamo un dipolo elettrico oscillante; esso è
di particolare importanza in quanto sia fenomeni di irraggiamento atomici
sia quelli relativi alle antenne trasmittenti possono, in un certo modo, essere
considerati come dovuti a dei dipoli di momento variabile nel tempo. Benchè
lo strumento matematico più adatto al nostro scopo sia il vettore di Hertz
~ e V . In que(vedi paragrafo 2.2), eseguiremo i calcoli usando i potenziali A
sto modo apparirà evidente come la condizione di Lorentz (2.12) intervenga
a semplificare il problema permettendo di calcolare solo tre integrali anzichè
i quattro che compaiono nelle (2.50) e (2.51). Inoltre, sarà possibile confrontare attraverso le proprietà del potenziale V il comportamento del dipolo
~ e V , le (2.1) e (2.4) ci
oscillante con quelle del dipolo statico. Ottenuti A
~ ed E.
~
forniranno per derivazione i campi B
5.2
Dipolo oscillante
~ come
Date due cariche −q e +q collocate rispettivamente nei punti O e O + d,
indicato in figura 5.1, supponiamo che, mentre la carica −q rimane ferma,
la carica +q oscilli lungo una direzione assegnata in modo che la distanza d~
vari secondo la legge:
d~ = d~0 cos ωt
(5.1)
53
54
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
Figura 5.1:
o, in forma complessa:
d~ = d~0 e−iωt
(5.2)
Evidentemente, al limite per d~0 tendente a zero, questo sistema di cariche
costituisce un dipolo il cui momento, oscillante, è dato dalla relazione:
~p = ~p0 e−iωt
(5.3)
in cui ~p0 indica la quantità:
~p0 = q d~0
(5.4)
Non ci interessa, per il momento, considerare le forze che determinano l’oscillazione del dipolo ; le (5.2) e (5.3) vengono assunte semplicemente come
dato iniziale del nostro calcolo. Ricordando la (1.15) e tenendo conto della
(5.3), la densità di corrente associata al dipolo risulta essere:
i
h
i
~ h
~ = −iωq d~0 e−iωt δ Q − (O + d)
~ (5.5)
~j(Q) = q dd δ Q − (O + d)
dt
ossia, utilizzando la (5.4)
~
~j(Q) = −iω~p0 e−iωt δ Q − (O + d)
h
i
(5.6)
Supponendo il vettore d~ trascurabile di fronte alla distanza (Q − O) e
calcolando mediante la (5.6) l’integrale che interviene nella (2.50) si ottiene
~ esso, come è evidente dalla (2.50), è
subito l’espressione del potenziale A;
55
5.2. DIPOLO OSCILLANTE
parallelo alla corrente ~j. Di conseguenza, assumendo la direzione di ~j come
~ sono:
asse polare ed O come origine, le componenti sferiche di A
Ar (P, t) = −
Aθ (P, t) =
r/c)
1 iω | ~p0 | e−iω(t −
4πǫ0
c2
r
1 iω | p~0 | e−iω(t −
4πǫ0
c2
r
cos ϑ
(5.7)
r/c)
sin θ
(5.8)
Aϕ (P, t) = 0
(5.9)
Da esse è immediato ottenere le componenti sferiche del vettore induzione
magnetica; infatti usando la (2.1) e ricordando le espressioni delle componenti
sferiche del rotore (C.8) si ottiene:
"
∂
1
∂Aθ
Br =
(sin θ Aϕ ) −
r sin θ ∂θ
∂ϕ
"
1 ∂Ar
∂
1
−
(r Aϕ )
Bθ =
r sin θ ∂ϕ
∂r
Bϕ
"
1 ∂
∂Ar
=
(r Aθ ) −
r ∂r
∂θ
= −
1 iω | p~0 |
4πǫ0
c2
#
#
#
= 0
(5.10)
= 0
(5.11)
=
iω
1
−
r
c
e−iω(t −
r
r/c)
sin θ
(5.12)
Per calcolare il potenziale V occorrerebbe considerare la densità di carica
associata al dipolo oscillante. Tuttavia possiamo arrivare più rapidamente al risultato utilizzando la condizione di Lorentz (2.11). Si ha infatti in
coordinate polari (vedi (C.7)):
∂V
∂t
~ =
= −c2 ∇ · A
= −c
2
"
#
1 ∂ 2
1 ∂
1 ∂Aϕ
(5.13)
(r Ar ) +
(sin θAθ ) +
2
r ∂r
r sin θ ∂θ
r sin θ ∂ϕ
ossia, usando le (5.7), (5.8) e (5.9),
∂V
1
e−iω(t −
= −
iω | ~p0 |
∂t
4πǫ0
r
r/c)
cos θ
iω
1
−
r
c
(5.14)
+ V0 (P )
(5.15)
Integrando questa relazione si ottiene:
1
e−iω(t −
V (P, t) =
| p~0 |
4πǫ0
r
r/c)
iω
1
cos θ
−
r
c
56
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
dove V0 (P ) è una funzione del posto indipendente dal tempo. Al limite per
ω tendente a zero il potenziale (5.15) diventa:
V (P, t) =
1 | p~0 | cos θ
+ V0 (P )
4πǫ0
r2
(5.16)
Questa espressione deve coincidere con il potenziale di un dipolo statico di
momento ~p0 ; di conseguenza si verifica immediatamente che V0 (P ) è nullo.
Possiamo ora ricavare dalla (2.4) il campo elettrico; si ha con qualche calcolo:
∂V
∂Ar
−
=
∂r
∂t
2
e−iω(t −
=
| ~p0 | cos θ
4πǫ0
r2
r/c)
1 ∂V
∂Aθ
−
=
r ∂θ
∂t
1
e−iω(t −
=
| ~p0 | sin θ
4πǫ0
r2
r/c)
Er = −
iω
1
−
r
c
(5.17)
Eθ = −
Eϕ = −
"
∂Aϕ
∂V
1
−
= 0
r sin θ ∂ϕ
∂t
iω
1
−
r
c
ω2
− 2 r
c
#
(5.18)
(5.19)
Le equazioni (5.10)–(5.12) e (5.17)–(5.19), di cui solo la parte reale è per
noi significativa, risolvono il problema dell’irraggiamento del dipolo; risulta
~ eB
~ sono tra loro ortogonali.
subito da esse che il campo E
É possibile distinguere, in base al valore della distanza r dal dipolo,
tre zone nelle quali i campi mostrano comportamenti differenti. La prima
zona e’ la cosiddetta zona vicina, corrispondente a punti a distanza r tali
che d << r << λ, ove λ indica la lunghezza d’ onda corrispondente alla
pulsazione ω del moto del dipolo. Per tali punti risulta
1
ω
ω2
>> >> 2 r
r
c
c
ed anche il ritardo rc con cui l’ onda arriva nel punto considerato é trascurabile. In tale zona le espressioni dei campi sono, percio’:
Bϕ ≃ −
e−iωt
iω
|
p
~
|
sin
θ
0
4πǫ0 c2
r2
2 | p~0 |
e−iωt
Er ≃
cos θ
4πǫ0
r3
(5.20)
(5.21)
57
5.2. DIPOLO OSCILLANTE
| p~0 |
e−iωt
Eϕ ≃
sin θ 3
4πǫ0
r
(5.22)
La (5.20) é la stessa espressione che si ricava dalla prima legge di Laplace
sostituendo ad una corrente di intensitá costante I una corrente di intensitá
variabile nel tempo qωe−iωt . Le (5.21) e (5.22) sono le espressioni che si
ottengono dalle corrispondenti relazioni per il dipolo statico, sostituendo ad
un momento di dipolo costante p~ un momento di dipolo variabile nel tempo
p~0 e−iωt . In questa regione, cioé, i campi, a parte il termine e−iωt , hanno un
comportamento di tipo stazionario, per cui la zona vicina viene detta anche
zona quasi–stazionaria.
La seconda zona é la cosiddetta zona intermedia o zona di induzione,
corrispondente a punti a distanza r tali che d << r ∼ λ. In tale zona 1r ∼ ωc
e nelle espressioni delle componenti dei campi sono presenti tutti i termini
delle (5.10)–(5.12) e (5.17)–(5.19).
La terza zona é la cosiddetta zona lontana o zona di radiazione o
asintotica, corrispondente a punti a distanza r tali che d << λ << r per
i quali risulta 1r << ωc . Analogamente a quanto è stato fatto nel paragrafo 4.3 per le onde cilindriche, studiamo le proprietà fisiche della soluzione
(5.10)–(5.12), (5.17)–(5.19) considerandone il comportamento asintotico. A
questo scopo supponendo che r sia grande rispetto a c/ω dalle (5.10)–(5.12)
otteniamo:
Bϕ ≃ −
ω2
e−iω(t −
1
| p~0 | 3 sin θ
4πǫ0
c
r
r/c)
(5.23)
Osservando poi che, per l’ipotesi fatta, si ha:
r
ω2
ω
1
≫
≫
2
c
c
r
(5.24)
le (5.17)–(5.19) danno:
Er = 0
Eθ ≃ −
(5.25)
| ~p0 | ω 2
e−iω(t −
sin
θ
4πǫ0 c2
r
r/c)
(5.26)
Prendendo la parte reale della (5.23) e della (5.26) si ottengono infine le
espressioni asintotiche del campo E.M.:
Bϕ
1
ω2
cos[ω(t − r/c)]
≃ −
| p~0 | 3 sin θ
4πǫ0
c
r
(5.27)
58
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
Figura 5.2:
Eθ ≃ −
cos[ω(t − r/c)]
| p~0 | ω 2
sin θ
2
4πǫ0 c
r
(5.28)
~ eB
~ sono ortogonali alla direzione r (vedi figura 5.2),
Risulta dunque che E
~ |=|E
~ | /c.
oltrechè tra di loro e che | B
Essi si propagano sotto forma di onde T EM, Trasversali Elettriche
~ eB
~ sono
e Magnetiche (cosı̀ dette perchè le componenti longitudinali di E
nulle), smorzate con legge iperbolica, la loro ampiezza è massima nel piano
ortogonale all’asse del dipolo e diminuisce fino ad annullarsi quando ci si
avvicina a questo asse. Ponendo ω = 0 nelle (5.17)–(5.19) si ottengono
invece le componenti del campo elettrico statico:
Er =
2 | ~p0 | cos θ
4πǫ0 r 3
(5.29)
Eθ =
| p~0 | sin θ
4πǫ0 r 3
(5.30)
analogamente si vede dalle (5.10)–(5.12) che il campo magnetico statico è
nullo. È da notare che mentre la parte statica del campo diminuisce con la
terza potenza di r, la parte che si propaga è solo inversamente proporzionale
a r. Ne segue che ad una certa distanza dal dipolo, esiste una zona, detta
zona delle onde in cui il campo E.M. si riduce alla sola parte propagativa.
Per dare una idea pittorica della generazione del campo propagativo
del dipolo oscillante, in figura (5.3) vengono riportate le linee del campo elettrico (riga superiore) e del campo magnetico (riga inferiore) in sette istanti
successivi, sei dei quali compresi entro il primo periodo di oscillazione del
sistema di cariche: in questo caso, il sistema di riferimento è stato scelto in
modo che entrambe le cariche risultano muoversi di moto armonico lungo la
congiungente, con la stessa pulsazione ω. Si può osservare come, al ripetersi
59
5.2. DIPOLO OSCILLANTE
Figura 5.3:
del moto periodico delle cariche le linee di campo generate durante i periodi precedenti di allontanino dalla sorgente propagandosi con le proprietà
discusse finora.
Calcoliamo ora il vettore di Poynting associato al campo dato dalle
equazioni (5.27) e (5.28); ricordando la definizione del vettore si ha:
2 4
2
~ = ǫ0 c2 E
~ ×B
~ = | ~p0 | ω sin2 θ cos [ω(t − r/c)] ~ir
S
16π 2 ǫ0 c3
r2
(5.31)
~ sul tempo, è:
L’intensità di radiazione, ossia il valor medio di S
1
I =
T
Z
0
T
2
2 4
~ | dt = | ~p0 | ω sin θ
|S
32π 2 ǫ0 c3 r 2
(5.32)
Questa relazione stabilisce che l’intensità I decresce, come è intuitivo, con
il quadrato della distanza mentre varia come sin2 θ quando ci si allontana
dall’asse del dipolo, come illustrato in figura 5.4. L’energia totale media
irradiata per unità di tempo, ossia la potenza media W irradiata dal dipolo,
può essere facilmente ottenuta integrando la (5.32) su una sfera di raggio r
con centro nel dipolo:
W =
Z
4π
I r 2 dΩ =
60
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
Figura 5.4:
=
| p~0 |2 ω 4
32π 2 ǫ0 c3
Z
2π
0
dϕ
Z
0
π
sin3 θ dθ =
| ~p0 |2 ω 4
12πǫ0 c3
(5.33)
Questo risultato può essere espresso in altra forma introducendo l’accelerazione quadratica media am della carica oscillante. Si ha infatti dalla (5.1):
d2 d~
= −d~0 ω 2 cos ωt
dt2
(5.34)
da cui, prendendo il quadrato del modulo, mediando su un periodo e ricordando la (5.4), si ottiene:
a2m =
1 ~ 2 4
| p~0 |2 ω 4
| d0 | ω =
2
2q 2
(5.35)
La (5.33) diventa perciò:
W =
2 1 q 2 a2m
3 4πǫ0 c3
(5.36)
questa espressione, detta equazione di Larmor, è di particolare importanza
perchè, come vedremo in seguito, l’irraggiamento di una carica in movimento
qualsiasi dipende dal modulo dell’accelerazione istantanea proprio attraverso
una relazione della forma (5.36).
5.3. OSCILLAZIONI SMORZATE
5.3
61
Oscillazioni smorzate
Nel precedente paragrafo abbiamo studiato l’irraggiamento del dipolo supponendo costante l’ampiezza di oscillazione d~0 . Questa ipotesi, tuttavia, richiede alcune precisazioni; è evidente infatti che l’emissione di un’onda E.M. fa
diminuire l’energia posseduta dalla carica oscillante e di conseguenza il valore
di d~0 . Ciò, beninteso, a patto che nulla intervenga a compensare l’energia
persa per irraggiamento. Senza considerare le cause dello smorzamento, ci
proponiamo ora di studiare le caratteristiche dell’emissione nell’ipotesi che
d~0 effettivamente decresca a causa dell’irraggiamento.
Stabiliamo, per prima cosa, il bilancio tra l’energia irradiata e l’energia
meccanica H posseduta dalla carica oscillante; quest’ultima, nel punto di
massima elongazione, cioè per d~ = d~0 , coincide con l’energia potenziale della
forza di tipo elastico che determina l’oscillazione del dipolo. Si ha pertanto:
H =
k ~ 2
| d0 |
2
(5.37)
dove k è la costante della forza elastica, la quale è legata alla massa m della
particella oscillante e alla frequenza angolare ω dalla ben nota relazione:
ω2 =
k
m
(5.38)
Mediante la (5.38) e la (5.4) la (5.37) può essere scritta nella forma:
H =
mω 2
| ~p0 |2
2q 2
(5.39)
Nell’ipotesi che lo smorzamento sia piccolo, ossia supponendo che in un tempo
pari al periodo T dell’oscillatore, l’ampiezza d~0 diminuisca di una quantità
trascurabile, si può calcolare il decremento di H eguagliandolo alla potenza
media irradiata. In questo modo, ricordando la (5.33), si ha:
−
dH
1 | ~p0 |2 ω 4
=
dt
12πǫ0
c3
(5.40)
da cui, utilizzando la (5.39):
d | ~p0 |
1 q2ω2
= −
| p~0 |
dt
4πǫ0 3mc3
(5.41)
Ponendo:
3mc3
1
= 4πǫ0 2 2
γ
q ω
(5.42)
62
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
ed integrando, si ottiene dalla (5.41):
| ~p0 | = | ~p0i | e−γt
(5.43)
dove p~0i indica il valore di ~p0 all’istante t = 0 in cui il dipolo inizia ad oscillare.
La (5.3) va pertanto sostituita dalle equazioni:
~p = 0 (t < 0)
~p = ~p0i e−γt e−iωt
(5.44)
(t ≥ 0)
(5.45)
le quali rappresentano una oscillazione smorzata, del tipo di quella indicata
in figura 5.5.
Figura 5.5:
È evidente che è essenziale supporre, come appunto si è fatto nella
(5.44), che per t < 0 il dipolo sia in quiete; diversamente l’equazione (5.45)
fornirebbe, al decrescere di t, dei valori di ~p arbitrariamente grandi, il che
manifestamente è cosa assurda. La costante 1/γ è una quantità, con dimensioni di un tempo, che prende il nome di vita media dell’oscillatore, τ ; essa
rappresenta il tempo durante il quale l’ampiezza di oscillazione si riduce di
un fattore 1/e.
L’ipotesi di un piccolo smorzamento equivale alla condizione:
1
≫ T;
γ
(5.46)
notiamo che 1/γ = τ è dell’ordine di 10−8 s nel caso di un elettrone che oscilli
ed emetta radiazione luminosa per la quale T = 10−15 − 10−16 s.
63
5.3. OSCILLAZIONI SMORZATE
Esaminiamo ora l’effetto della legge del moto (5.44)–(5.45) sulle onde
irradiate dal dipolo. È manifesto che, nell’ipotesi di piccolo smorzamento,
tutto si ridurrà a scrivere delle equazioni simili alla (5.28), in cui però il
momento ~p0 è smorzato con legge esponenziale. A partire dall’istante t = r/c,
in cui l’onda emessa all’istante t = 0 raggiunge i punti situati a distanza r,
il campo elettrico sarà pertanto rappresentato dall’equazione asintotica:
Eθ (P, t) ≃ −
−iω(t −
| p~0i | ω 2
−γ(t−r/c) e
sin
θ
e
4πǫ0 c2
r
r/c)
(t ≥
r
) (5.47)
c
mentre, prima di questo istante:
r
(5.48)
Eθ (P, t) = 0 (t < )
c
Si può dimostrare che, a causa del fattore di smorzamento, la composizione
spettrale dell’onda E.M. risulta alterata; essa, anzichè essere rigorosamente
monocromatica, è costituita da una banda di frequenze con centro in ω. Per
fare ciò consideriamo la variabile t′ = t − r/c ed introduciamo la costante:
1
ω 2 sin θ
= −
| p~0i | 2
4πǫ0
c
r
(0)
Eθ
(5.49)
in questo modo la (5.47) può essere scritta in funzione di t′ nella forma:
(0)
Eθ (P, t′ ) = Eθ
e−(γ
+ iω) t′
(5.50)
Sviluppiamo ora in integrale di Fourier (vedi appendice D):
1
Eθ (P, t′ ) = √
2π
+∞
Z
′ ′
K(ω ′ ) e−iω t dω ′
(5.51)
−∞
in cui K(ω ′ ) è la funzione che rappresenta la composizione spettrale in
questione. Siccome per la (5.48) Eθ è nullo per t′ < 0, si può scrivere:
1
K(ω ′ ) = √
2π
Z
+∞
0
′ ′
Eθ eiω t dt′
(5.52)
ossia, usando la (5.50):
(0)
+∞
E
′
′
e[i(ω − ω) − γ]t dt′
K(ω ) = √θ
2π 0
(0)
E
1
= − √θ
=
′
2π i(ω − ω) − γ
′
Z
i arctan
(0)
Eθ
= √
2π
e
q
ω′ − ω
γ
(ω ′ − ω)2 + γ 2
(5.53)
64
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
Sostituendo nella (5.51) il campo propagativo assume la forma:
(0)
Eθ
Eθ (P, t) =
2π
+∞
Z
−∞
h
−i ω ′ (t − rc ) − arctan
e
q
(ω ′
−
ω)2
+
ω′ − ω
γ
γ2
i
dω ′
(5.54)
esso è pertanto costituito da uno spettro continuo di onde con ampiezze di
densità:
(0)
Eθ
′
Λ(ω ) =
q
2π (ω ′ − ω)2 + γ 2
(5.55)
′
il termine arctan ω γ− ω rappresenta invece una costante di fase. Tenendo
~ |=|E
~ | /c, l’intensità associata all’onda di frequenza angolare
conto che | B
ω ′ risulta essere:
(0)
2
ǫ0 c Eθ
1
I(ω ′) =
′
2
2π
(ω − ω)2 + γ 2
(5.56)
ponendo:
Im
(0)
2
ǫ0 c Eθ
=
2 2πγ
(5.57)
l’espressione (5.56) assume la forma:
I(ω ′) = Im
γ2
(ω ′ − ω)2 + γ 2
(5.58)
La funzione I(ω ′), che prende il nome di funzione lorentziana, è rappresentata
in figura 5.6. Il suo massimo valore Im corrisponde a ω ′ = ω; si ottiene
subito inoltre:
I(ω + γ) =
1
Im
2
(5.59)
per cui la costante γ rappresenta anche la semiampiezza della distribuzione
I(ω ′) a metà altezza massima. In altri termini: il reciproco della vita media
dell’oscillatore è uguale alla semiampiezza γ. Questo risultato può essere
espresso più chiaramente nella forma:
∆ω ∆t =
1
2
(5.60)
dove al posto di γ si è scritto ∆ω e ∆t indica la metà della vita media 1/γ.
5.3. OSCILLAZIONI SMORZATE
65
Figura 5.6:
L’equazione (5.60) assume un particolare significato in elettrodinamica quantistica. Moltiplicandola membro a membro per h̄ e ricordando la
relazione che lega l’energia di un fotone alla sua pulsazione, essa diventa:
∆W ∆t =
h̄
2
(5.61)
dove W è l’energia associata al fotone. L’interpretazione quantistica di questa relazione è la seguente: l’oscillatore irradia fotoni la cui energia è affetta
da una indeterminazione ∆W ; l’istante in cui ciò avviene è contenuto nell’intervallo di tempo 2 ∆t, ossia è affetto a sua volta dall’indeterminazione
temporale ∆t. Il prodotto delle due indeterminazioni è costante e vale h̄2 .
Questo appunto è l’enunciato del principio di indeterminazione di Heisenberg nel caso in cui si voglia studiare la dipendenza dal tempo dell’energia
di una particella.
66
5.4
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
Onde E.M. in risonanza
Finora abbiamo trattato i problemi relativi alla propagazione di onde E.M.
in maniera molto astratta, da un punto di vista matematico e rifacendo trattazioni ed argomentazioni di più di un secolo fa. Vediamo ora di trattare
qualche argomento più moderno e soprattutto di valenza applicativa. É superfluo notare che la nostra vita quotidiana è condizionata, praticamente in
ogni istante, dall’uso di strumenti basati sulla ricezione di onde E.M. (radio,
TV, radar, telefoni cellulari, fibre ottiche per telecomunicazioni, ... ). Il
funzionamento di tali strumenti è ottimizzato sfruttando il fenomeno della
risonanza, nell’emissione, nella trasmissione e nella ricezione delle onde E.M..
Descriveremo brevemente e semplicemente alcuni dei principi fisici sui quali
si basano queste tecnologie, incominciando dall’antenna lineare, che è il prototipo di un emettitore di onde E.M. in risonanza, e per il quale possiamo
ancora usare le EqM macroscopiche nel vuoto, senza grosse limitazioni.
5.5
Antenna Lineare
Il presente paragrafo è dedicato allo studio dell’irraggiamento di uno dei più
semplici, ma anche più significativi, tipi di antenna lineare. Consideriamo il
sistema, schematizzato in figura 5.7, formato da due barre metalliche di lunghezza d/2 allineate lungo l’asse z e collegate, per le estremità contigue, ad un
generatore di oscillazioni elettriche funzionante con una frequenza angolare
ω (ad esempio, un generatore di corrente alternata).
Se si trascura lo smorzamento dovuto all’emissione di radiazione e
se l’antenna è sottile, in modo da poter trascurare la propagazione della
corrente in direzione perpendicolare all’ asse z, dopo un transitorio pari ad
alcuni periodi di oscillazione del generatore, l’ antenna diventa sede di un’
onda di corrente lungo l’ asse z, di tipo stazionario.
Facendo riferimento ad una delle due barre metalliche e supponendo,
per semplicità di trattazione, di spostare l’ origine dell’ asse nell’ estremo
libero della barra e che il generatore sia collegato al secondo estremo, in
z = d/2, la corrente che percorre l’ antenna dal generatore verso l’ estremo
libero è rappresentata da un’ onda regressiva:
i1 = I1 sin(ωt + kz)
(5.62)
dove I1 rappresenta l’ ampiezza dell’ onda di corrente del generatore e l’
onda si propaga con velocita’ c, ovvero ω = kc. Sulla superficie terminale
della barretta, in z = d/2, si ha una riflessione totale della corrente, con
uno sfasamento di π radianti. La barretta è dunque percorsa anche da una
67
5.5. ANTENNA LINEARE
Figura 5.7:
seconda corrente, rappresentata da un’ onda progressiva, che si somma a
quella regressiva:
i2 = I2 sin(ωt − kz + π)
(5.63)
Ad ogni istante, dunque, la corrente totale presente nella barretta è data
dalla somma:
i = i1 + i2 = I1 [sin(ωt + kz) + sin(ωt − kz + π)]
(5.64)
ove si è tenuto conto del fatto che l’ ampiezza dell’ onda riflessa è uguale a
quella dell’ onda incidente, come per un passaggio da un mezzo conduttore
ad uno perfettamente isolante. La corrente totale risulta allora (si usino, per
esempio, le formule di prostaferesi):
i = i1 +i2 = 2 I1 [sin(ωt+π/2)∗cos(kz−π/2)] = 2 I1 cos ωt ∗ sin kz(5.65)
In questa espressione è facile riconoscere un’ onda stazionaria che presenta
dei nodi in corrispondenza dei punti di coordinata z = 2n λ/4, con n ≥ 0 e
λ = 2π
c, e dunque anche in corrispondenza dell’ estremo libero, e dei ventri in
ω
corrispondenza dei punti di coordinata z = (2n+ 1) λ/4, con n ≥ 0. In figura
5.8 è riportato il profilo della corrente stazionaria lungo l’ intera antenna,
considerata nel sistema di riferimento di figura 5.7, ad un istante fissato: nel
68
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
caso in cui la lunghezza totale d sia pari ad un multiplo pari o dispari di λ/2
la corrente lungo l’ antenna avrà due nodi in corrispondenza dei due estremi
liberi e un nodo o, rispettivamente, un ventre in corrispondenza del punto
di inserimento del generatore; in tal caso si è in presenza di una antenna in
configurazione risonante. Se, invece, d non è un multiplo intero di λ/2 in
corrispondenza del punto centrale si avrà un valore di corrente non estremale
e l’ antenna opererà in configurazione non risonante. Considerando, invece,
l’ onda di tensione lungo l’ antenna, anche in questo caso si ha la somma
di un’ onda regressiva e di una progressiva, che non presentano, per/ó, uno
sfasamento relativo dovuto alla riflessione sull’ estremo libero:
v = v1 +v2 = 2 V1 [sin(ωt+kz)+sin(ωt−kz)] = 2 V1 sin ωt ∗ cos kz(5.66)
dove l’ ampiezza dell’ onda riflessa e’ ancora uguale a quella dell’ onda incidente. Si vede, pertanto, che le onde di tensione e di corrente, ad ogni
istante, risultano essere sfasate di λ/4 e all’ estremita’ libera della bacchetta
metallica, dove la corrente presenta un nodo, la tensione ha un ventre.
Figura 5.8:
Nell’ ipotesi di antenna con sezione trascurabile, sulla quale la corrente
abbia una distribuzione uniforme, le barre sono sede di una corrente elettrica
69
5.5. ANTENNA LINEARE
la cui densità, ritornando al sistema di riferimento di figura 5.7, può essere
scritta come:
!#
"
I
d
ω
0
−iωt
~j = ~k
|z| −
(5.67)
e
sin
S
c
2
dove S è la sezione delle barre, supposta costante per semplicità, e I0 = 2 I1
è la massima intensità di corrente che le percorre. Tale densità di corrente
è chiaramente simmetrica nelle due parti dell’ antenna. Ci interessa ora
studiare il campo E.M. prodotto dalla corrente che percorre l’antenna, in
punti posti ad una distanza da essa molto grande rispetto alla sua dimensione
lineare d.
Per sviluppare i calcoli utilizziamo il metodo del vettore di Hertz,
~
introdotto nel paragrafo 2.2. Occorre innanzitutto ricavare il vettore Q;
ricordando la (2.21), dalla (5.67) si ottiene:
!#
"
~
d
I
∂Q
ω
0
−iωt
|z| −
(5.68)
= ~k
e
sin
∂t
S
c
2
da cui, integrando:
"
−iωt
ω
~ = ~k I0 ie
Q
sin
S
ω
c
d
|z| −
2
!#
Mediante la (2.52) si ha pertanto:
~
t − rP Q /c)
1 Z Q(Q,
~
dVQ =
Z(P,
t) =
4πǫ0 V
rP Q
"
Z
1 ~kI0 i
e−iω(t−rP Q /c)
ω
=
sin
4πǫ0 Sω V
rP Q
c
(5.69)
(5.70)
d
|z| −
2
!#
dVQ
dove l’integrazione è estesa a tutto il volume occupato dalle sbarre dell’antenna. Avendo supposto la distanza rP Q grande rispetto a d, si può sviluppare
rP Q in serie di Mac Laurin nell’intorno dell’origine, O, e scrivere:
rP Q = rP O +
∇Q rP Q · ~k
O
| Q − O | + ....
~rP O · ~k
z = rP 0 − z cos θ
(5.71)
rP O
dove θ è l’angolo tra la direzione di P − O e l’asse dell’antenna. Inserendo
questa relazione nella (5.71) e trascurando i termini proporzionali alle potenze
~ diventa:
di 1/rP 0 superiori alla prima, l’espressione di Z
≃ rP O +
~
Z(P,
t) ≃
1 ~ iI0 e−iω(t−rP O /c)
k
·
4πǫ0 Sω
rP O
"
!#
Z
ω
d
−i ωc cos θ z
sin
|z| −
dV
e
c
2
V
(5.72)
70
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
Tenendo conto che dV = S dz, trasformando l’integrazione sui valori negativi di z in quella sui valori positivi ed esprimendo il seno con gli esponenziali
immaginari, si ottiene con semplici calcoli:
~
Z(P,
t) ≃
=
1 ~ iI0 e−iω(t−rP O /c)
k
4πǫ0
ω
rP O
"
!#
ω
d
sin
|z| −
dz
c
2
Z
+d/2
1 ~ iI0 e−iω(t−rP O /c)
k
4πǫ0
ω
rP O
!#
"
d
ω
z −
dz
sin
c
2
Z
+d/2
cos θ
cos ωd
− cos ωd2c
2c
2icI0 e
1
4πǫ0 ω 2
−iω(t−r/c)
= ~k
r
ω
cos θ z
e−i c
−d/2
0
ω
e−i c
cos θ z
·
ω
+ ei c
sin2 θ
cos θ z
(5.73)
dove al posto di rP O si è scritto semplicemente r. La (5.73) è la richiesta
espressione asintotica del vettore di Hertz.
~ mediante
Per calcolare il campo E.M. cominciamo col valutare ∇ × Z;
la (A.20) si ricava:
1 2icI0 e−iω(t−r/c)
~
∇×Z = ∇
4πǫ0 ω 2
r
cos θ
cos ωd
− cos ωd2c
2c
sin2 θ
× ~k
D’altra parte, utilizzando l’espressione (C.6) del gradiente in coordinate polari e tenendo conto solo dei termini infinitesimi del primo ordine per r tendente
ad infinito, si ha:
∇
2icI0 e
1
4πǫ0 ω 2
−iω(t−r/c)
r
cos θ
cos ωd
− cos ωd2c
2c
sin2 θ
−iω(t−r/c) cos ωd − cos ωd cos θ
2c
2c
~ir 1 2icI0 iω e
2
2
4πǫ0 ω
c
r
sin θ
Essendo
≃
(5.74)
~ir × ~k = −~iϕ sin θ
(5.75)
la (5.74) diventa infine:
1 2I0 e
4πǫ0 ω
−iω(t−r/c)
~ ≃ ~iϕ
∇×Z
r
cos θ
cos ωd
− cos ωd2c
2c
sin θ
·
71
5.5. ANTENNA LINEARE
Applicando la (2.28) possiamo ora dedurre l’espressione asintotica del vettore
induzione magnetica; si ha:
~ =
B
1 ∂
~
∇×Z
c2 ∂t
e
1 1
2iI0
≃ −~iϕ 2
c 4πǫ0
−iω(t−r/c)
r
cos θ
cos ωd
− cos ωd2c
2c
sin θ
(5.76)
~ è differente
Analogamente, applicando la (2.29) e ricordando che il vettore Q
da zero solo dove esiste la distribuzione di corrente, ossia nel volume interno
alle barre dell’antenna, si ottiene:
−iω(t−r/c) cos ωd − cos ωd cos θ
2c
2c
~ = ∇×∇×Z
~ = ∇× 1 2I0 e
E
4πǫ0 ω
r
sin θ
Tenendo conto che:
~ir × ~iϕ = −~iθ
~iϕ
(5.77)
(5.78)
e considerando sempre solo termini infinitesimi del primo ordine per r ten~ risulta essere pertanto:
dente ad infinito, l’espressione asintotica di E
−iω(t−r/c) cos ωd − cos ωd cos θ
1
2I
e
0
2c
2c
~
E = ∇
4πǫ0 ω
r
sin θ
1 2iI0 e
≃ −~iθ
4πǫ0 c
−iω(t−r/c)
r
× ~iϕ
cos θ
cos ωd
− cos ωd2c
2c
sin θ
(5.79)
Basta ora prendere la parte reale delle (5.76) e (5.79) per ottenere le espressioni asintotiche finali dei campi:
~iϕ (5.80)
~iθ (5.81)
ωd cos θ
ωd
1 2I0 sin[ω(t − r/c)] cos 2c − cos 2c
~
B(P, t) ≃ −
4πǫ0 c2
r
sin θ
ωd
ωd cos θ
1 2I0 sin[ω(t − r/c)] cos 2c − cos 2c
~
E(P, t) ≃ −
4πǫ0 c
r
sin θ
Dalle equazioni ottenute si deduce che il campo si propaga sotto forma di
~ eB
~ sono ortogonali tra di loro, diminuiscono con
onde trasversali, i campi E
~
~ |. La dipendenza da θ, però, è alquanto
la distanza come 1/r e | B |= 1/c | E
complicata e contiene, come parametro la lunghezza dell’antenna.
72
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
Per completare questi risultati non resta che scrivere l’espressione del
vettore di Poynting; ricordando la (3.10) e tenendo conto che i versori ~ir , ~iθ
e ~iϕ formano una terna destrorsa, essa è:
~ =
S
I02
4π 2 ǫ0 c
2
sin [ω(t − r/c)]
r2
cos θ
cos ωd
− cos ωd2c
2c
sin θ
2
~ir
(5.82)
Ne segue che l’intensità di radiazione vale:
ωd cos θ
ωd
1 ZT ~
1
I02 cos 2c − cos 2c
I =
| S | dt =
T 0
4π 2 ǫ0 c 2r 2
sin θ
2
(5.83)
Questa equazione richiede un’analisi accurata per stabilire, in relazione alla
lunghezza dell’antenna, la dipendenza da θ dell’energia irradiata. Osserviamo
innanzitutto che
πd
ωd
=
2c
λ
(5.84)
Quando la lunghezza dell’antenna è piccola rispetto alla lunghezza d’onda λ,
sviluppando i coseni in serie di potenze, la (5.83) diventa:
1
I02
I =
4π 2 ǫ0 c 2r 2
ω 2 d2 1
8c2
1
=
32π 2 ǫ0 c3
!2
− cos2 θ
=
sin θ
!
2
I02 d4
4 sin θ
ω
16c2
r2
(5.85)
Ne segue, confrontando con la (5.32), che l’irraggiamento dell’antenna coincide con quello di un dipolo oscillante per il quale si abbia:
I0 d2
| ~p0 | =
4c
(5.86)
Particolarmente importante è il caso in cui la lunghezza dell’antenna
d è uguale ad un numero intero di semilunghezze d’onda, cioè:
d = n
λ
2
(n = 1, 2, 3.....)
(5.87)
Tenendo conto della (5.84) e sostituendo nella (5.83) si ottiene per n pari:
1
I02 (1 ± cos(n/2π cos θ))2
I =
4π 2 ǫ0 c 2r 2
sin2 θ
(5.88)
73
5.5. ANTENNA LINEARE
in cui i due segni si riferiscono al caso in cui n/2, a sua volta, è rispettivamente
pari o dispari. Per n pari, la (5.88) può quindi essere messa nella forma:
I =
I =
1
π 2 ǫ0 c
I02
2r 2
1
I02
π 2 ǫ0 c 2r 2
cos4
n
π cos θ
4
2
sin θ
4 n
sin 4 π cos θ
sin2 θ
(n = 2, 6, 10, .......)
(n = 4, 8, 12, .......)
(5.89)
Per n dispari, invece:
I =
1
4π 2 ǫ0 c
I02
2r 2
cos2
n
π cos θ
2
2
sin θ
(5.90)
In figura 5.9 sono riportati, per vari valori di n, i grafici polari della
dipendenza angolare di I; da essi appare evidente che al crescere di n l’emissione diventa via via più direzionale e si allontana dal piano ortogonale
all’antenna.
Consideriamo ora, limitatamente al caso in cui n = 1, la potenza
totale irradiata da un’antenna. Analogamente a quanto fatto per il dipolo,
occorre calcolare l’integrale:
Z
Z π cos2 π cos θ
I02 2π
1
2
dθ
dϕ
W =
I r 2 dΩ =
2
4π ǫ0 c 2 0
sin θ
0
4π
Z π cos2 π cos θ
1
I02
2
2
=
I
= 2, 44
(5.91)
4πǫ0 c 0 0
sin θ
8πǫ0 c
Z
È da notare che per d = λ, cioè nel caso n = 2, vale una relazione analoga,
salvo che il coefficiente di proporzionalità passa da 2.44 a 6.72. Vicerversa,
per d = 10−2 λ, nel qual caso l’antenna è approssimabile con un dipolo
oscillante e la potenza può essere ottenuta sostituendo la (5.86) nella (5.33),
si ha:
W =
2
I02 (10−2 2π)4
ω4
I02 d4
−7 I0
=
=
6.49
10
16c2 12πǫ0 c3
8πǫ0 c
24
8πǫ0 c
(5.92)
avendo usato la relazione ωλ = 2πc. Se ne conclude che, a parità di I0
l’efficienza di irraggiamento di una antenna lineare in risonanza è di gran
lunga maggiore di quella di un dipolo.
74
CAPITOLO 5. IRRAGGIAMENTO DI ONDE E.M.
Figura 5.9:
Capitolo 6
Guide d’onda
6.1
EqM per la guida d’onda
Abbiamo visto che usando in maniera appropriata un’antenna lineare è possibile ottenere una buona direzionalità nella emissione delle onde E.M.. Emissioni ancora più direzionali potrebbero essere ottenute con configurazioni geometriche dell’antenna più complicate o con sistemi composti da piu’ antenne
lineari opportunamente spaziate.
Viene da chiedersi se non sia possibile convogliare tutta l’energia E.M.
emessa da una sorgente in un’unica direzione. Il problema che si vuole affrontare, in particolare, è quello di una propagazione direzionale e confinata
di un’ onda E.M.. Il metodo più utile per confinare i campi propagativi dell’
onda è quello di realizzare una struttura guidante con pareti metalliche, un
tubo metallico: in tale modo, infatti, si sfrutta il fatto che i campi propagativi si attenuano entro un conduttore secondo una legge esponenziale del
tipo:
~
~ = 0)|e−x/δ
|E(x)|
= |E(x
(6.1)
~
dove x indica la profondità entro il materiale conduttore, E(x
= 0) è il
~
campo elettrico dell’ onda all’ ingresso del materiale conduttore, E(x)
è il
campo elettrico dell’ onda alla profondità x e δ rappresenta lo spessore di
conduttore dopo il quale il campo si è attenuato di un fattore e; tale spessore
viene indicato con il termine profondità di pelle ed il suo valore dipende sia
dalle caratteristiche del conduttore, ovvero dalla sua conduttività σ, sia dalla
frequenza dell’ onda e.m., secondo la relazione:
δ=
s
2ǫ0 c2
σω
(6.2)
75
76
CAPITOLO 6. GUIDE D’ONDA
La profondità di pelle per un buon conduttore, quale è il rame, assume valori
di ∼ 6 · 10−10 m per frequenze di ∼ 5 · 1015 Hz, cioè nell’ ultravioletto,
di ∼ 6 · 10−9 m per frequenze di ∼ 5 · 1013 Hz, cioè nell’ infrarosso, di
∼ 7 · 10−7 m per frequenze di ∼ 3 · 1011 Hz, cioè nella regione delle microonde
e di ∼ 6 · 10−5 m per frequenze di ∼ 3 · 105 Hz, cioè nella regione delle onde
lunghe.
Utilizzando una parete metallica per definire il volume entro il quale
far propagare le onde E.M. si ottiene l’ azione guidante voluta, dal momento
che una qualunque componente dell’ onda che si propaghi perpendicolarmente alla superficie metallica si smorzerà rapidamente entro di essa e la
sola componente parallela all’ asse della guida sopravviverà, imponendo cosı̀
di fatto una direzione di propagazione. Un altro effetto della azione guidante di una struttura metallica consiste nel fatto che i campi che si trovano
all’ interno di essa rimangono ivi contenuti, assicurando il confinamento dell’
energia associata all’ onda ed impedendo, altresı̀, che campi esterni vengano
a interferire con quelli da trasmettere.
Tenendo conto che le dimensioni trasversali dei tubi metallici sono
dell’ordine di grandezza della lunghezza d’onda dell’onda E.M. che si vuole
trasmettere, per motivi pratici parleremo di tubi delle dimensioni di qualche
cm, e di conseguenza di onde centimetriche. L’interesse ad avere sorgenti
intense di onde E.M. con lunghezza d’onda dell’ordine del centimetro fu stimolato soprattutto dalla richiesta di localizzare oggetti in movimento (aerei)
a distanza, tramite riflessione di onde E.M. di lunghezza d’onda inferiore alla dimensione dell’oggetto. Se si fossero utilizzate onde E.M. di lunghezza
d’onda maggiore (decina di metri), l’intensità delle onde riflesse sarebbe stata
trascurabile.
Studiamo quindi il problema della propagazione di un’onda E.M. in
un tubo metallico rettilineo e di sezione costante, con pareti di spessore
trascurabile e conducibilità infinita. Vedremo poi come correggere per queste
ipotesi non fisiche. Supponiamo che all’interno del tubo sia contenuto un
mezzo materiale isotropo non dispersivo, con costante dielettrica ǫ = ǫr ǫ0 ,
dove ǫr è la suscettività elettrica relativa, e con permeabilità magnetica µ =
µr µ0 , dove µr è la suscettività magnetica relativa. Utilizzeremo le EqM
macroscopiche in un mezzo materiale:
~ = ρlibere
∇·D
(6.3)
~ = 0
∇·B
(6.4)
~
~ = − ∂B
∇×E
∂t
(6.5)
6.1. EQM PER LA GUIDA D’ONDA
~
~ = ~jcond + ∂ D
∇×H
∂t
77
(6.6)
~ e campo main cui sono stati introdotti i vettori spostamento elettrico D
~ per tenere conto degli effetti dovuti al mezzo materiale, lasciando
gnetico H
inalterata la struttura delle sorgenti (ρlibere e ~jcond ). Nel caso semplice che
trattiamo porremo:
~ = ǫr ǫ0 E
~ = ǫE
~
D
(6.7)
~ = µr µ0 H
~ = µH
~
B
(6.8)
~ = ρ ~j
E
(6.9)
dove ρ è la resistività specifica del mezzo materiale.
Vogliamo studiare, in particolare, se è possibile propagare un’onda
E.M. lungo l’asse della guida senza perdite. Si vede subito che questa condi~ che si propaga sia, in ogni istante
zione fisica impone che il campo elettrico E
ed in ogni punto del contorno, normale alla superficie, cioè:
~ × ~n = 0
E
(6.10)
Questa condizione assicura che non ci sono perdite di potenza per effetto
Joule sulle pareti. Dalla (6.9) si vede che la condizione (6.10) ammette solo
~j ortogonale in ogni punto alla superficie del contorno della guida, ipotizzata
per ora come una pura superficie geometrica, di “spessore” nullo.
Supponiamo di propagare onde E.M. armoniche rispetto al tempo, che
variano cioè in ogni punto rispetto al tempo come eikct , dove k è il numero
d’onda nel vuoto, cioè ω = kc. Consideriamo un sistema di assi cartesiani
ortogonali in cui l’asse z coincida con l’asse della guida e consideriamo una
~ eB
~ per t = 0 e z = 0 (cioè la sezione della guida
configurazione dei campi E
~
~ 0 . Sarà:
a z = 0), che chiameremo E0 e B
~ 0 (x, y) = E0x (x, y)~i + E0y (x, y)~j + E0z (x, y)~k
E
(6.11)
~ 0 (x, y) = B0x (x, y)~i + B0y (x, y)~j + B0z (x, y)~k
B
(6.12)
e
Questi vettori rappresentano i campi che entrano attraverso la prima faccia
della struttura guidante e che si vogliono far propagare, senza perdite, lungo
la guida.
78
CAPITOLO 6. GUIDE D’ONDA
Chiediamoci se è possibile propagare lungo l’asse z le configurazioni
(6.11) e (6.12) con una velocità di fase vf . Poniamo cioè per il numero d’
onda che caratterizza la propagazione entro la guida:
α =
ω
kc
=
vf
vf
(6.13)
Si precisa che vf è diverso da c, ovviamente, in quanto non siamo nel vuoto,
√
ma sarà anche diverso, come vedremo, da c/ ǫr µr , cioè la velocità di propagazione nel mezzo materiale infinito, non limitato dalle pareti conduttrici.
~ eB
~ saranno allora descritti, in ogni punto P interno alla
I campi E
guida e ad ogni istante t, dalle equazioni:
~
E(x,
y, z, t) = E0x (x, y)~i + E0y (x, y)~j + E0z (x, y)~k ei(kct
− αz)
~
B(x,
y, z, t) = B0x (x, y)~i + B0y (x, y)~j + B0z (x, y)~k ei(kct
− αz)
h
h
i
i
(6.14)
(6.15)
Data la (6.14), la condizione (6.10) diventa:
~ 0 × ~n = 0
E
(6.16)
Con le posizioni (6.14) e (6.15), le (6.5)– (6.6) in cui si ponga ~jcond = 0, e si
utilizzino le (6.7), (6.8), diventano:
k
∂B0z
+ iαB0y = iǫr µr E0x
∂y
c
∂B0z
k
−iαB0x −
= iǫr µr E0y
∂x
c
∂B0x
k
∂B0y
−
= iǫr µr E0z
∂x
∂y
c
∂E0z
+ iαE0y = −ikcB0x
∂y
∂E0z
−iαE0x −
= −ikcB0y
∂x
∂E0x
∂E0y
−
= −ikcB0z
∂x
∂y
e le (6.3)–(6.4), in cui si ponga ρlibere = 0:
(6.17)
(6.18)
79
6.1. EQM PER LA GUIDA D’ONDA
∂E0x
∂E0y
+
− iαE0z = 0
∂x
∂y
∂B0x
∂B0y
+
− iαB0z = 0
∂x
∂y
(6.19)
Di queste ultime possiamo non tenere conto poichè sono una conseguenza delle (6.17) e (6.18). Risolvendo le prime due delle (6.17) e (6.18)
rispetto a E0x , E0y , B0x , B0y , si ottiene:
"
#
∂E0z
i
∂B0z
E0x = − 2 α
+ kc
λ
∂x
∂y
#
"
∂E0z
∂B0z
i
− kc
E0y = − 2 α
λ
∂y
∂x
#
"
i
k ∂E0z
∂B0z
B0x = 2 ǫr µr
− α
λ
c ∂y
∂x
#
"
k ∂E0z
∂B0z
i
+ α
B0y = − 2 ǫr µr
λ
c ∂x
∂y
(6.20)
dove per semplicità si è posto:
λ2 = ǫr µr k 2 − α2
(6.21)
supponendo λ2 6= 0.
Sostituendo le (6.20) nell’ultima equazione delle (6.17) e (6.18), si ha
che queste risultano soddisfatte se:
∂ 2 E0z
∂ 2 E0z
+
+ λ2 E0z = 0
∂x2
∂y 2
(6.22)
∂ 2 B0z
∂ 2 B0z
+
+ λ2 B0z = 0
∂x2
∂y 2
(6.23)
Consideriamo ora la condizione al contorno (6.16). Con riferimento alla figura
6.1, se indichiamo con ~τ il versore tangente al contorno della guida nel punto
(x, y, 0) e con ~n il versore normale, si ha evidentemente ~n = ~k × ~τ .
Ricordando l’espressione del doppio prodotto esterno (A.5) avremo:
~ 0 × ~n = E
~ 0 × (~k × ~τ ) = (E
~ 0 · ~τ )~k − (E
~ 0 · ~k)~τ
E
80
CAPITOLO 6. GUIDE D’ONDA
Figura 6.1:
e quindi dovremo avere, separatamente:
~ 0 · ~k) = E0z = 0
(E
~ 0 · ~τ ) = 0
(E
sul contorno
sul contorno
(6.24)
(6.25)
Indicando con dx/ds e dy/ds i coseni direttori della tangente al contorno s,
la condizione (6.25) equivale a:
E0x
dx
dy
+ E0y
= 0
ds
ds
(6.26)
Sostituendo nella (6.26) le prime due delle (6.20) in cui si sia posto E0z = 0,
ricaviamo:
∂B0z dy
∂B0z dx
kc
−
∂x ds
∂y ds
!
= 0
(6.27)
Ricordando che i coseni direttori della normale ~n al contorno s sono rispetdy
dx
tivamente dn
= dy
e dn
= − dx
, la condizione al contorno (6.26) diventa:
ds
ds
dB0z
= 0
dn
sul contorno
(6.28)
Da un punto di vista fisico il fatto che l’unica condizione iniziale (6.16) si
trasformi nelle due condizioni (6.24) e (6.28) corrisponde al fatto che il campo
elettrico totale è costituito da due componenti, una di tipo “elettrostatico”
ed una di tipo “indotto”.
Il problema della propagazione di onde E.M. entro un tubo cilindrico
riempito con un mezzo dielettrico omogeneo è dunque ridotto all’integrazione
delle equazioni differenziali (6.22) e (6.23), con le rispettive condizioni al
contorno (6.24) e (6.28). Ricavate E0z e B0z , le (6.20) forniscono le altre
~ eB
~ e le condizioni al contorno risultano soddisfatte.
componenti di E
6.1. EQM PER LA GUIDA D’ONDA
81
Fra le soluzioni del sistema considerato sono particolarmente importanti quelle in cui è nulla la componente assiale B0z del campo magnetico,
oppure quelle in cui è nulla la componente assiale E0z del campo elettrico.
Le prime sono dette onde di tipo elettrico o trasversali magnetiche (T.M.);
le seconde sono dette onde di tipo magnetico o trasversali elettriche (T.E.).
Si fa notare che, secondo questa terminologia, le onde E.M. che si propagano nello spazio indefinito, privo di sorgenti, sarebbero trasversali elettriche e
magnetiche (T.E.M.).
Per le onde di tipo elettrico il problema si riduce a determinare la
componente assiale E0z del campo elettrico soddisfacente alla (6.22) e alla
condizione al contorno (6.24). Dopo ciò, le altre componenti del campo
saranno date da:
iα ∂E0z
iα ∂E0z
E
=
−
0y
λ2 ∂x
λ2 ∂y
k ∂E0z
i
k ∂E0z
i
B0y = − 2 ǫr µr
= 2 ǫr µr
λ
c ∂y
λ
c ∂x
E0x = −
B0x
(6.29)
Le onde T.M. vengono generate da conduttori penetranti in una estremità
della guida in modo da simulare un dipolo elettrico oscillante parallelo all’
asse z di propagazione.
Per le onde di tipo magnetico il problema si riduce, invece, a determinare la componente assiale B0z del campo magnetico soddisfacente alla
(6.23) con la condizione al contorno (6.28). In tal caso le altre componenti
del campo saranno date da:
ikc ∂B0z
λ2 ∂y
iα ∂B0z
= − 2
λ ∂x
ikc ∂B0z
λ2 ∂x
iα ∂B0z
= − 2
λ ∂y
E0x = −
E0y =
B0x
B0y
(6.30)
Le onde T.E. vengono generate facendo penetrare nella guida, attraverso
una sua estremità, dei conduttori simulanti un dipolo magnetico oscillante
parallelo all’ asse z di propagazione.
I vari casi di onde T.M. e T.E. (più l’ onda T.E.M., qualora esistente,
cosa non vera nel caso particolare delle guide d’ onda) costituiscono un insieme di campi completo per la descrizione di una perturbazione E.M. qualsiasi
entro una guida o una cavità.
Le equazioni (6.22) e (6.23) con le relative condizioni al contorno (6.24)
e (6.28) sono una vecchia conoscenza della Fisica Matematica. Se consideriamo una membrana elastica piana con l’orlo fisso (un tamburo) ed indichiamo
con ~z(x, y) lo spostamento lungo la normale al piano di un punto qualsiasi della membrana, otterremo che la membrana vibrerà secondo l’equazione
82
CAPITOLO 6. GUIDE D’ONDA
(6.22), con z al posto di E0z , e la condizione al contorno z = 0. Se volessimo,
invece, studiare le vibrazioni di una membrana con il bordo libero, ma vincolato a spostarsi solo perpendicolarmente al piano della membrana (i piatti
di una batteria musicale), otterremmo l’equazione (6.23) con z al posto di
B0z con la condizione al contorno (6.28).
Si sapeva quindi che ambedue le equazioni ammettevano soluzioni non
nulle soltanto per valori discreti del parametro λ2 , detti autovalori, dipendenti
dalla forma del contorno s della sezione del tubo. Le soluzioni corrispondenti
ad un dato autovalore si chiamano autofunzioni. Si può dimostrare che λ2 è
un numero reale e positivo; dalla (6.21), ricordando la (6.13), si ha:
α2 =
k 2 c2
= ǫr µr k 2 − λ2
vf2
(6.31)
da cui risulta che vf2 è reale. Però, affinchè in corrispondenza dell’autovalore
λ2 si abbia un’onda non smorzata, deve essere α, e quindi anche vf , reale.
Ciò richiede che sia ǫr µr k 2 − λ2 ≥ 0, e quindi:
k ≥ √
λ
ǫr µr
(6.32)
la quale mostra che esiste un valore minimo di k, cioè della frequenza ν =
kc/(2π), al di sotto della quale nessuna propagazione è più possibile nella
guida. Se λ20 è il più piccolo degli autovalori della (6.22) o (6.23), nel tubo
si possono propagare soltanto onde di frequenza ν superiore, o tutto al più
eguale, alla frequenza νc , che diremo critica, espressa dalla relazione:
νc =
λ0 c
√
2π ǫr µr
(6.33)
Ogni modo di propagazione, identificato da un autovalore λ, avrà poi una
frequenza di taglio, definita da una relazione analoga alla (6.33) ove a λ0
si sostituisca il corrispondente valore di λ, al di sotto della quale il modo
non può propagarsi nel tubo senza smorzarsi, in quanto α diventa complesso.
L’andamento di α, ovvero della corrispondente quantità normalizzata all’
unità per ν → ∞, in funzione della frequenza è indicato qualitativamente
nella figura 6.2, ove sono rappresentati solamente i primi cinque generici modi
di propagazione e le relative frequenze di taglio sono indicate con νi (i=0,
..., 4). Si può riconoscere che per ogni frequenza assegnata, maggiore della
frequenza critica, c’é solo un numero finito di modi che si possono propagare,
indicati in figura dai punti sulle rette verticali di equazione ν = cost disegnate
per due generici valori di ν diversi da νi .
6.1. EQM PER LA GUIDA D’ONDA
83
Figura 6.2:
Dalla (6.31), per vf reale, si ricava ancora:
c
c
kc
1
q
> √
= √
(6.34)
2
2
2
λ
ǫr µr 1 −
ǫr µr
ǫr µr k − λ
2
ǫr µr k
√
dalla quale risulta che variando k dal valore λ/ ǫr µr ad ∞, la vf , sempre
√
√
decrescendo, varia da +∞ al valore c/ ǫr µr . Ora c/ ǫr µr è la velocità di
propagazione in un mezzo dielettrico identico a quello contenuto nel tubo e
che riempia tutto lo spazio. Ne segue che la velocità di propagazione delle
onde nel tubo è superiore a quella delle onde libere (non guidate) in un
dielettrico identico a quello contenuto nel tubo stesso e che riempia tutto lo
spazio. In particolare, se il dielettrico nel tubo è il vuoto, allora detta velocità
supera la velocità della luce nel vuoto. Questo risultato non contraddice la
teoria della relatività poichè si tratta di velocità di propagazione della fase,
che è una grandezza geometrica, mentre nella teoria della relatività si intende
la velocità di propagazione di un segnale fisico, quindi di una velocità di
gruppo.
Fissato un autovalore di λ, ad ogni valore di k corrisponde un valore
di α, e quindi un valore della velocità di propagazione di fase vf dato dalla
(6.34). D’altra parte è impossibile realizzare fisicamente un generatore con k
esattamente definito, ma sarà più realistico parlare di un intervallo (k, k+dk),
in corrispondenza al quale avremo un intervallo di valori di α, (α, α+dα), che
si può scrivere anche come (α, α+ dα
dk). Consideriamo ora la sovrapposizione
dk
delle onde appartenenti al piccolo intervallo (k, k + dk). Questo insieme di
onde è detto gruppo di onde, e la quantità vg , definita dalla relazione:
vf = √
vg = c
dk
dα
(6.35)
84
CAPITOLO 6. GUIDE D’ONDA
è detta velocità di gruppo. Ora risulta:
dk
α
=
dα
ǫr µr k
(6.36)
e quindi:
vg
cα
c
=
= √
ǫr µr k
ǫr µr
s
1 −
c
λ2
< √
≤ c
2
ǫr µr k
ǫr µr
(6.37)
che mostra che la velocità di gruppo è minore della velocità della luce. Si ha
inoltre che vf e vg sono legate dalla relazione:
vg vf =
6.2
6.2.1
c2
ǫr µr
(6.38)
Esempi di propagazione in guide d’onda
con contorno definito
Guida d’onda a sezione rettangolare
Il caso più semplice che si può presentare è quello di una guida d’onda a
sezione rettangolare i cui lati indichiamo con a e b. Assumeremo uno dei
vertici del rettangolo sezione come origine degli assi, con gli assi x e y diretti
rispettivamente secondo i lati di lunghezza a e b, come indicato in figura 6.3.
Le equazioni (6.22) e (6.23) sono dello stesso tipo di quella risolta per la pro-
Figura 6.3:
pagazione di onde libere in coordinate cartesiane (vedi paragrafo 4.2.1 ), anzi
più semplici in quanto in due dimensioni (x, y) e con l’unica differenza che
6.2. ESEMPI DI PROPAGAZIONE IN GUIDE D’ONDA CON CONTORNO DEFINITO85
abbiamo indicato con λ2 (anzichè con ω 2 /c2 ) la costante reale. Procedendo
esattamente allo stesso modo col criterio della separazione delle variabili e
passando direttamente all’espressione con funzioni trigonometriche, si trova
facilmente che, per onde di tipo elettrico (B0z =0) la soluzione sarà:
E0z = (A cos px + B sin px) (C cos qy + D sin qy)
(6.39)
con A, B, C, D costanti per ora arbitrarie, con dimensione di un campo
elettrico, e con
p2 + q 2 = λ 2
(6.40)
Rispetto alle onde libere le cose cambiano ora. Mentre nel caso della
(4.13) non c’erano condizioni al contorno da rispettare, e quindi tutti i valori di ω erano permessi, il soddisfacimento della (6.24) sul contorno cambia
radicalmente la situazione. Dobbiamo avere:
per x = 0 ed x = a, y arbitrario
E0z = 0
(6.41)
per y = 0 ed y = b, x arbitrario
ne segue che deve essere A = 0, C = 0, ed inoltre pa = mπ, qb = nπ, da cui
p = mπ/a, q = nπ/b, con m, n numeri interi. Si ha dunque:
mπ
nπ
E0z = C1 sin
x sin
y
(6.42)
a
b
con C1 costante (complessa) arbitraria con dimensione di un campo elettrico.
Ricordando la (6.40) si deducono per λ2 gli autovalori:
λ2mn = π 2
m2
n2
+
a2
b2
!
(6.43)
In figura 6.4 è riportato, in vista tridimensionale, l’insieme degli autovalori
λ2mn per m=0, ... 10 e n=0, ... 10, avendo supposto a = 10 unita’, b = 5
unita’.
′
Dalle (6.29) e scrivendo λ2 C1 al posto di C1 , abbiamo in conclusione
le seguenti soluzioni di tipo elettrico (T.M.):
mπ
nπ
mπ
′
cos
x sin
y
E0x = −iC1 αmn
a
a
b
nπ
mπ
nπ
′
E0y = −iC1 αmn
sin
x cos
y
b
a
b
nπ
mπ
′
x sin
y
E0z = C1 λ2mn sin
a
b
k nπ
mπ
nπ
′
B0x = iC1 ǫr µr
sin
x cos
y
c b
a
b
mπ
nπ
k mπ
′
cos
x sin
y
B0y = −iC1 ǫr µr
c a
a
b
B0z = 0
(6.44)
86
CAPITOLO 6. GUIDE D’ONDA
Figura 6.4:
ove, in virtù della (6.31) è:
2
αmn
= ǫr µr k 2 − λ2mn ,
αmn =
q
ǫr µr k 2 − λ2mn
(6.45)
Dalle prime due delle (6.44) si riconosce che è soddisfatta la condizione al
contorno (6.25) sulle componenti tangenziali del campo elettrico. La presenza
dell’ unità immaginaria nella espressione di alcune componenti sta ad indicare
una differenza di fase spaziale (o temporale) di π/2 tra tali componenti ed
E0z .
Considerando le espressioni (6.44) delle componenti dei campi dell’
onda T.M. si possono fare alcune osservazioni. Si può notare innanzi tutto
che per m = 0 e n = 0 anche E0z = 0 e tutte le componenti trasversali si
annullano, ovvero che i valori piu’ piccoli di m e n per un’ onda T.M. devono
essere entrambi maggiori di zero.
Una seconda osservazione riguarda l’ orientazione relativa dei vettori
~
~
~0 e B
~ 0 . Come è facile verificare, il prodotto
E e B, ovvero dei vettori E
~
~
~
~
scalare E · B = E0 · B0 = 0, cosa che indica come entro la guida sia possibile
propagare, lungo l’ asse della stessa e senza perdite, un campo incidente con
vettore induzione magnetica perpendicolare sia alla direzione di propagazione
che al vettore campo elettrico, mentre quest’ ultimo non è più perpendicolare
alla direzione di propagazione. Entro la guida i vettori: vettore d’ onda α~k,
6.2. ESEMPI DI PROPAGAZIONE IN GUIDE D’ONDA CON CONTORNO DEFINITO87
~ eB
~ non formano più una terna destrorsa, come, invece avviene sia nello
E
spazio libero che in un mezzo materiale infinito.
Con semplici calcoli è anche immediato verificare che per i campi dell’
onda T.M. non vale più una semplice relazione tra i moduli dei vettori, quale
~ = c|B|
~ nel caso dello spazio vuoto o |E|
~ = c/√ǫr µr |B|
~ nel caso di un
|E|
mezzo materiale.
Per terminare queste considerazioni sulle componenti dei campi di un’
onda T.M., se si considera l’ espressione del vettore di Poynting entro la guida
si ottiene:
~ = ǫc2 E
~ ×B
~ = ǫc2 E
~0 × B
~ 0 e2i(kct−αz)
S
k
iC1,2 λ2mn ǫr µr
(6.46)
!
mπ
mπ
mπ
nπ
sin
x cos
x sin2 y +
c a
a
a
b
!
mπ
nπ
nπ
nπ
k
,2
2
2
sin
x sin y cos y +
+ ~j iC1 λmn ǫr µr
c b
a
b
b
k
− ~k C1,2 αmn ǫr µr
c#
"
2
mπ 2
nπ
nπ
mπ
nπ
mπ
x sin2 y +
x cos2 y
cos2
sin2
a
a
b
b
a
b
~0 × B
~ 0 = ~i
E
Le componenti trasversali del vettore di Poynting sono immaginarie pure e
non danno contributo al flusso di energia mediato sul tempo; la componente
~ invece, fornisce il valor medio della densità di flusso di potenza
assiale di S,
lungo la guida. Le componenti trasversali, inoltre, si annullano sul bordo, in
virtù delle condizioni al contorno, assicurando il confinamento dell’ energia
all’ interno della guida.
In figura 6.5 sono riportate le dipendenze delle tre componenti di
~ 0 e delle due non nulle di B
~ 0 da x e y separatamente: le tre curve si
E
riferiscono a m=1, 2, 3 e n=1, 2, 3 rispettivamente e fanno riferimento a
valori delle dimensioni dei lati del rettangolo sezione a = 10 unita’, b = 5
unita’. Come è già stato osservato, le componenti trasversali soddisfano la
condizione sulla componente tangenziale del campo elettico sul bordo della
sezione della guida.
In figura 6.6 sono riportati i grafici bidimensionali delle tre componenti
~
di E0 per m=1, n=1, nell’ipotesi a=10 unità e b=5 unità.
In figura 6.7 è riportato l’ andamento sulla sezione della guida della
componente longitudinale del vettore di Poynting per m=1 e n=1, m=1 e
n=2 e per m=2 e n=1 nell’ipotesi a=10 unità e b=5 unità. Si può osservare
88
CAPITOLO 6. GUIDE D’ONDA
come la distribuzione dell’ energia sulla sezione non sia uniforme, ma tenda
a presentare dei massimi locali, la cui posizione dipende dai valori di m e n:
i modi T.M. che si propagano nella guida distribuiscono, cioè, la loro energia
in modo da occupare spazialmente in maniera diversa la guida.
In figura 6.8 è riportato l’ andamento sulla sezione della guida delle tre
componenti del vettore di Poynting per m=1 e n=1, nell’ipotesi a=10 unità
e b=5 unità. Si può osservare come il flusso di energia secondo le direzioni
trasversali x e y risulti essere in parte positivo ed in parte negativo, in modo
tale che il suo valore netto sulla sezione, puntuale o mediato sul tempo,
risulta nullo. Come già accennato, le componenti trasversali del vettore di
Poynting non contribuiscono al flusso netto di energia E.M. nella guida: al
più, nel caso di un modo o di una combinazione lineare di modi con campi
longitudinali complessi si può avere un flusso di energia medio trasversale.
Tuttavia, siccome si tratta di un flusso circolatorio, esso costituisce in realtà
solo energia immagazzinata (si vedano più oltre le cavità risonanti) e non ha
in pratica una grande importanza.
6.2. ESEMPI DI PROPAGAZIONE IN GUIDE D’ONDA CON CONTORNO DEFINITO89
Figura 6.5:
90
CAPITOLO 6. GUIDE D’ONDA
Figura 6.6:
6.2. ESEMPI DI PROPAGAZIONE IN GUIDE D’ONDA CON CONTORNO DEFINITO91
Figura 6.7:
92
CAPITOLO 6. GUIDE D’ONDA
Figura 6.8:
6.2. ESEMPI DI PROPAGAZIONE IN GUIDE D’ONDA CON CONTORNO DEFINITO93
Per avere soluzioni di tipo magnetico (T.E.), dobbiamo porre E0z = 0
e possiamo sempre scrivere B0z , in analogia alla (6.39), come:
B0z = (A cos px + B sin px) (C cos qy + D sin qy)
(6.47)
sempre con la condizione (6.40). La condizione al contorno (6.28) si traduce
in:
∂B0z
∂x
∂B0z
∂y
= 0
= 0
per x = 0 ed x = a, y arbitrario
per y = 0 ed y = b, x arbitrario
(6.48)
Sarà quindi B = 0, D = 0, p = mπ/a, q = nπ/b, e quindi, dalle (6.30) si
otterranno le seguenti soluzioni di tipo magnetico:
mπ
nπ
nπ
′
cos
x sin
y
E0x = iC2 kc
b
a
b
mπ
mπ
nπ
′
E0y = −iC2 kc
sin
x cos
y
a
a
b
E0z = 0
mπ
nπ
mπ
′
sin
x cos
y
B0x = iC2 αmn
a
a
b
nπ
mπ
nπ
′
B0y = iC2 αmn
cos
x sin
y
b
a
b
mπ
nπ
′
B0z = C2 λ2mn cos
x cos
y
(6.49)
a
b
′
dove C2 è al solito un fattore costante complesso arbitrario, e gli autovalori
λ2mn di λ2 sono definiti ancora dalla (6.43) e (6.45).
Nel caso delle onde T.E. si può osservare che i più piccoli valori di m e
n accettabili sono (0,1) o (1,0) a seconda di quale dei due lati del rettangolo
sia maggiore. Si possono poi ripetere considerazioni analoghe a quelle fatte
per le onda di tipo elettrico per quanto riguarda l’ orientazione dei vettori α~k,
~ e B,
~ la relazione tra i moduli dei vettori E
~ e B,
~ l’ espressione del vettore di
E
Poynting entro la guida. Tali osservazioni saranno, poi, valide anche per un’
onda qualunque entro la guida, espressa nella base dell’ insieme delle onde
T.M. e T.E..
È ovvio che, tanto per le soluzioni T.E. quanto per le soluzioni T.M.,
per avere le componenti del campo E.M. dappertutto nella guida occorre moltiplicare ciascuna delle (6.44) e (6.49) per il fattore di propagazione
ei(kct−αmn z) . Dovendo αmn essere reale, affinchè l’onda non sia smorzata, dalla (6.45) si deduce che la guida non può trasmettere tutte le frequenze. Per
ogni onda, caratterizzata dalla coppia di numeri interi m e n, vi è dunque un
valore minimo di k, compatibile con una propagazione senza smorzamento;
questo valore minimo definisce per ogni tipo di onda la frequenza di rottura,
al di sotto della quale non vi può più essere propagazione. Supposto a > b,
94
CAPITOLO 6. GUIDE D’ONDA
la più piccola delle frequenze di rottura, o frequenza critica νc , corrisponde
al valore:
π
λ10
= √
kmin = √
ǫr µr
a ǫr µr
per cui, ricordando che ν =
νc =
(m = 1, n = 0)
(6.50)
kc
,
2π
c
√
2a ǫr µr
(6.51)
Esaminando le (6.44) e (6.49), si vede che per ν di poco superiore a νc , avremo
onde di tipo (6.47), cioè T.E., non di tipo T.M., che sono identicamente
eguali a zero. Cioè le onde di frequenza di poco superiore a quella critica
che si propagano nel tubo sono di tipo T.E.. Affinchè nel tubo a sezione
rettangolare si propaghino anche onde di tipo T.M. è necessario che k superi
il minimo autovalore corrispondente alla (6.22) con valori dei campi non
identicamente nulli, e cioè:
π
λ11
= √
k ≥ √
ǫr µr
ǫr µr
s
1
1
+ 2
2
a
b
(6.52)
e quindi
c
ν ≥ √
2 ǫr µr
s
1
1
+
a2
b2
(6.53)
Si osserva infine che, assegnato un valore di k maggiore del valore minimo
(6.50), si possono propagare nel tubo un numero finito di onde di tipo elettrico
e di tipo magnetico e precisamente tutte le onde corrispondenti agli autovalori
λmn di λ per cui è verificata la (6.32).
6.2.2
Guida d’onda a sezione circolare
Consideriamo ora una guida d’onda costituita da un cilindro circolare di
~
raggio a e, assumendo come asse z l’asse del cilindro, riferiamo i campi E
~ interni ad esso ad un sistema di coordinate cilindriche r, ϕ, z, come
e B
indicato in figura 6.9. Come nel caso precedente, assumeremo che i campi
~ eB
~ dipendano dal tempo t e dalla coordinata z per mezzo del termine di
E
propagazione ei(kct−αz) . Nel piano (r, ϕ) esprimeremo invece i campi mediante
le componenti Er , Eϕ , Br , Bϕ . Le (6.14) e (6.15) saranno quindi riscritte
come:
~ ϕ, z, t) = E0r (r, ϕ)~ir + E0ϕ (r, ϕ)~iϕ + E0z (r, ϕ)~k ei(kct
E(r,
h
i
− αz)
(6.54)
6.2. ESEMPI DI PROPAGAZIONE IN GUIDE D’ONDA CON CONTORNO DEFINITO95
Figura 6.9:
~ ϕ, z, t) = B0r (r, ϕ)~ir + B0ϕ (r, ϕ)~iϕ + B0z (r, ϕ)~k ei(kct
B(r,
h
i
− αz)
(6.55)
Con un po’ di facile ginnastica matematica si ottengono le equazioni:
"
#
∂E0z
1 ∂B0z
i
+ kc
E0r = − 2 α
λ
∂r
r ∂ϕ
#
"
1 ∂E0z
∂B0z
i
− kc
E0ϕ = − 2 α
λ
r ∂ϕ
∂r
#
"
i
k 1 ∂E0z
∂B0z
B0r = 2 ǫr µr
− α
λ
c r ∂ϕ
∂r
#
"
k ∂E0z
1 ∂B0z
i
+ α
B0ϕ = − 2 ǫr µr
λ
c ∂r
r ∂ϕ
(6.56)
analoghe alle (6.20) e in cui è sempre λ2 = ǫr µr k 2 − α2 . Si ricavano ancora,
ricordando l’espressione del laplaciano trasverso (cioè nelle coordinate x e y)
in coordinate polari ∇2 f = ∂ 2 f /∂x2 + ∂ 2 f /∂y 2 = ∂ 2 f /∂r2 + 1/r ∂f /∂r +
1/r 2 ∂ 2 f /∂ϕ2 , le equazioni:
∂ 2 E0z
1 ∂E0z
1 ∂ 2 E0z
+
+
+ λ2 E0z = 0
∂r 2
r ∂r
r 2 ∂ϕ2
(6.57)
1 ∂B0z
1 ∂ 2 B0z
∂ 2 B0z
+
+
+ λ2 B0z = 0
∂r 2
r ∂r
r 2 ∂ϕ2
(6.58)
analoghe alle (6.22) e (6.23). Le condizioni al contorno che vanno associate
rispettivamente alle (6.57) e (6.58) sono:
E0z = 0
per r = a
(6.59)
96
CAPITOLO 6. GUIDE D’ONDA
∂B0z
= 0
∂r
per r = a
(6.60)
Potremo considerare onde di tipo magnetico (E0z = 0) o di tipo elettrico
(B0z = 0) ponendo eguale a zero i primi o rispettivamente i secondi membri
nelle parentesi delle (6.56). Le equazioni (6.57) e (6.58) erano state già trovate
∂2
(con la complicazione di un termine aggiuntivo con ∂z
2 ) nel paragrafo 4.2.2
relativo alla propagazione di onde libere in coordinate cilindriche e si era
già visto il metodo della separazione delle variabili per ottenere due integrali
particolari e quindi l’integrale generale dalla combinazione lineare dei due
integrali particolari. Più precisamente, esprimendo E0z o B0z come prodotti
delle due funzioni R(r) e Φ(ϕ), le (6.57) e (6.58) vengono soddisfatte dalle
equazioni:
1 dR
d2 R
+
+
dr 2
r dr
n2
λ − 2 R = 0
r
2
!
d2 Φ
+ n2 Φ = 0
2
dϕ
(6.61)
(6.62)
con n numero intero. Si era già visto che la (6.61) è l’equazione differenziale di Bessel di ordine n, di argomento λr, che ammette come soluzioni
la funzione di Bessel Jn (λr) e la funzione di Neumann Nn (λr) (cfr. Appendice F). Avevamo già visto che Nn (λr) non è regolare per r = 0, che
è per altro una coordinata possibile per la propagazione nella guida (l’asse
del cilindro). Le soluzioni accettabili per le (6.57) e (6.58) saranno quindi
del tipo Jn (λr) (An cos nϕ + Bn sin nϕ) con An e Bn costanti arbitrarie.
Consideriamo onde di tipo elettrico:
E0z = E0 Jn (λr) (An cos nϕ + Bn sin nϕ)
(6.63)
con la condizione al contorno (6.59). Essa richiede che:
Jn (λa) = 0
(6.64)
e se indichiamo con ξn1, ξn2 , ξn3 , ..., ξnj , gli zeri positivi (non nulli) della
funzione Jn (λr) (cfr. la figura F.1), disposti in ordine crescente, la condizione
(6.64) è soddisfatta ponendo:
(e)
λ = λnj =
ξnj
a
(n = 0, 1, 2, 3, ..., j = 1, 2, 3, ...)
(6.65)
(e)
che fornisce gli autovalori λnj del parametro λ per le onde di tipo elettrico.
(e)
q
(e)2
Ponendo αnj =
ǫr µr k 2 − λnj e tenendo conto delle (6.56) in cui sia
stato posto B0z = 0, si ottengono le relazioni esplicite di E0r , E0ϕ , B0r , B0ϕ :
6.2. ESEMPI DI PROPAGAZIONE IN GUIDE D’ONDA CON CONTORNO DEFINITO97
(e)
E0φ =
αnj
(e)
J ′ (λ r) (An cos nϕ + Bn sin nϕ)
(e) n nj
λnj
(e)
1 αnj
(e)
Jn (λnj r) (−An sin nϕ + Bn cos nϕ) n
−iE0 (e)2
r
λnj
(e)
E0z = E0 Jn (λnj r) (An cos nϕ + Bn sin nϕ)
E0r = −iE0
B0r = E0
iǫr µr k
(e)
J (λ r) (−An sin nϕ + Bn cos nϕ) n
(e)2 rc n nj
λnj
B0φ = E0
−iǫr µr k ′ (e)
Jn (λnj r) (An cos nϕ + Bn sin nϕ)
(e)
λnj c
(6.66)
Si puo’ verificare che la condizione al contorno per il campo elettrico tangenziale e’ soddisfatta, in quanto E0r = E0ϕ = 0 per r = a. Come si può
~0
facilmente verificare, anche in questo caso il prodotto scalare del vettore E
~ 0 è nullo, mentre E
~ 0, B
~ 0 e αnj ~k non formano più una terna
col vettore B
destrorsa. É poi, nuovamente vero che non esiste più una semplice relazione
~0 e B
~ 0 e che il flusso di energia netto è dato dalla
tra i moduli dei vettori E
sola componente longitudinale del vettore di Poynting.
In figura 6.10 è riportato l’andamento in funzione della coordinata
radiale e di quella angolare di E0z , nonchè il grafico bidimensionale di E0z
nel caso in cui si considera J1 (λr) con λ = ξ11 /a, con una dimensione radiale
a pari a 10 unità.
Nel caso di onde di tipo magnetico avremo:
B0z = B0 Jn (λr) (A′n cos nϕ + Bn′ sin nϕ)
(6.67)
con la condizione al contorno (6.60), la quale richiede che sia:
Jn′ (λa) = 0
(6.68)
Se indichiamo ora con ηn1 , ηn2 , ηn3 , ..., ηnj , ... gli zeri positivi non nulli,
disposti in ordine crescente, della Jn′ (λr) (cfr. la figura F.2), gli autovalori di
λ, per le onde di tipo magnetico, saranno
ηnj
(m)
(n = 0, 1, 2, 3, ..., j = 1, 2, 3, ...)
(6.69)
λ = λnj =
a
(m)
q
(m)2
con i corrispondenti valori αnj
=
ǫr µr k 2 − λnj . Sostituendo tali espressioni nella (6.56) in cui sia stato posto E0z = 0, si ottengono le
espressioni esplicite di E0r , E0ϕ , B0r , B0ϕ , non riportate esplicitamente per
brevità.
98
CAPITOLO 6. GUIDE D’ONDA
Figura 6.10:
6.3. CAVO COASSIALE
99
Tanto nel caso di onde T.M. che T.E. esiste dunque una successione
doppiamente infinita di autovalori del parametro λ, ciascuno caratterizzato
da due numeri interi, per i quali si ha propagazione lungo la guida. Per le
onde T.M. il più piccolo autovalore di λ è λe01 = ξa01 ≃ 2.4
e quindi
a
(e)
νmin =
1.2 c
√
πa ǫr µr
(6.70)
Per le onde T.E., se indichiamo con η0 il più piccolo degli zeri ηnj della (6.68),
si ha:
η0 c
(m)
(6.71)
νmin =
√
2πa ǫr µr
Ma qui, contrariamente a quello che avviene per gli zeri ξnj delle Jn (λr), il
più piccolo degli zeri delle Jn′ (λr) non è η01 bensı́ η11 ≃ 1.841, come si può
dimostrare da alcune relazioni di ricorrenza delle Jn′ (λr) e Jn (λr) (cfr. la
figura F.2), per cui risulta η11 < ξ01 . Ne segue che mentre per le onde T.M.,
quella di più bassa frequenza che si può propagare nel tubo è la T.M.01 ,
per le onde T.E. sarà la T.E.11 , e la prima a propagarsi al di sopra della
frequenza critica sarà la T.E.11 , diversamente dal caso della guida a sezione
rettangolare ove il primo modo di propagazione e’ di tipo T.E.01 o T.E.10 .
6.3
Cavo coassiale
Col nome di cavo coassiale si intende un tubo limitato da due cilindri metallici
circolari e coassiali che serve a guidare un’onda E.M. che si propaga nello
spazio anulare tra i due cilindri.
Indicheremo con a il raggio del cilindro esterno, con b il raggio di
quello interno e riferiremo al solito i campi interni alla guida a coordinate
cilindriche r, ϕ, z, con z asse della guida.
Analogamente al caso precedente, il problema si riduce ancora a determinare la soluzione delle (6.61) e (6.62) con le rispettive condizioni al
contorno:
E0z = 0
per r = a, r = b
(6.72)
e
∂B0z
= 0 per r = a, r = b
∂r
(6.73)
Ma qui l’asse z non è più compreso nel dominio di propagazione dell’onda e
quindi non è più necessario imporre la condizione che la funzione R(r) definita
100
CAPITOLO 6. GUIDE D’ONDA
dall’equazione differenziale (6.61) sia regolare per r = 0, ma solamente per
b ≤ r ≤ a. In questo caso le soluzioni sono le funzioni di Bessel Jn (λr) e
di Neumann Nn (λr) di ordine n. Possiamo perciò prendere come soluzione
della (6.61) una combinazione lineare a coefficienti costanti delle suddette
funzioni, ponendo:
R(λr) = C Jn (λr) + D Nn (λr)
(6.74)
Per le onde di tipo T.M. avremo allora:
E0z = E0 [C Jn (λr) + D Nn (λr)] (An cos nϕ + Bn sin nϕ) (6.75)
con la condizione (6.72). Ne segue che deve essere:
C Jn (λa) + D Nn (λa) = 0
C Jn (λb) + D Nn (λb) = 0
(6.76)
Queste equazioni, lineari omogenee in C e D, sono compatibili soltanto
quando il loro determinante è nullo, cioè:
Jn (λa) Nn (λb) − Jn (λb) Nn (λa) = 0
(6.77)
I valori accettabili per λ, cioè gli autovalori di λ, sono le radici dell’equazione
trascendente (6.77), che disposte in ordine crescente indicheremo con βn1 ,
βn2 , βn3 , ..., βnj . Avremo allora:
C
Nn (βnj a)
Nn (βnj b)
= −
= −
D
Jn (βnj a)
Jn (βnj b)
(6.78)
e potremo assumere:
2
E0z = E0 βnj
[Nn (βnj a) Jn (βnj r) − Jn (βnj a) Nn (βnj r)]
(Anj cos nϕ + Bnj sin nϕ)
(6.79)
con Anj , Bnj costanti arbitrarie. Sostituendo nelle (6.56), in cui si sia posto
~0 e B
~ 0 che definiscono il modo
B0z = 0, si ottengono le altre componenti di E
di propagazione. Si puo’ verificare che anche in questo caso le componenti
tangenziali del campo elettrico si annullano sulle pareti metalliche del cavo.
Per le onde di tipo T.E. avremo analogamente:
B0z = B0 [C ′ Jn (λr) + D ′ Nn (λr)]
(An cos nϕ + Bn sin nϕ)
con la condizione al contorno (6.73).
(6.80)
101
6.3. CAVO COASSIALE
Sarà pertanto:
C ′ Jn′ (λa) + D ′ Nn′ (λa) = 0
C ′ Jn′ (λb) + D ′ Nn′ (λb) = 0
(6.81)
da cui segue
Jn′ (λa) Nn′ (λb) − Jn′ (λb) Nn′ (λa) = 0
(6.82)
che è l’equazione trascendente che determina gli autovalori del parametro
λ, che, disposti in ordine crescente, indicheremo con γn1 , γn2 , γn3, ..., γnj .
Avremo ora:
C′
Nn′ (γnj a)
Nn′ (γnj b)
=
−
=
−
(6.83)
D′
Jn′ (γnj a)
Jn′ (γnj b)
e pertanto potremo assumere:
2
B0z = B0 γnj
[Nn′ (γnj a) Jn (γnj r) − Jn′ (γnj a) Nn (γnj r)]
′
A′nj cos nϕ + Bnj
sin nϕ
(6.84)
′
con A′nj , Bnj
costanti arbitrarie. Sostituendo nelle (6.56), in cui si sia posto
~0 e B
~ 0 e si puo’ verificare
E0z = 0, si ottengono le altre componenti di E
che le componenti tangenziali del campo elettrico si annullano sulle pareti
metalliche del cavo.
Concludendo, anche per i cavi coassiali vi è per ogni intero n (n =
0,1,2,3,...) una successione di infiniti autovalori del parametro λ. Inoltre ad
ogni valore di n e di j corrisponde un valore minimo di k per il quale la
propagazione del tipo di onda considerata è possibile. Si può osservare che,
a parità di raggio esterno a, le frequenze critiche corrispondenti ai modi di
oscillazione di un cavo coassiale costituiscono un insieme più denso di quello
della guida d’onda a sezione circolare e quindi il cavo coassiale è più adatto
alla trasmissione di segnali analizzabili in serie di Fourier.
Una particolarità del cavo coassiale è che, a differenza di quanto succede in una guida d’ onda, in esso il modo TEM è non solo possibile ma
anche dominante: tale modo è privo di frequenza di taglio, perchè per esso
il numero d’ onda αnj è sempre reale e coincide con il valore caratteristico
~ = c/n|B|
~ e,
del mezzo indefinito. Per tale modo vale anche la relazione |E|
~ B
~ e αnj~k formano una terna destrorsa.
come ovvio, i vettori E,
Per completezza possiamo osservare che il modo TEM non puo’ sussistere in una guida formata da un solo conduttore perchè, possedendo solamente componenti dei campi trasversali alla direzione di propagazione, per
essi devono valere le equazioni di Maxwell:
~ 0T EM = 0, ∇t · E
~ 0T EM = 0,
∇t × E
(6.85)
102
CAPITOLO 6. GUIDE D’ONDA
dove ∇t indica l’ operatore vettoriale ∇ ove si considerino le sole compo~ 0T EM è soluzione di un problema
nenti trasversali. Questo vuole dire che E
elettrostatico bidimensionale, per cui oltre alle già menzionate relazioni sul
numero d’ onda e sui moduli del vettori, siccome la superficie del cilindro
metallico della guida deve essere equipotenziale, il campo elettrico all’ interno è identicamente nullo. Non è dunque possibile sostenere il modo TEM
con una struttura costituita da un unico conduttore, ma è necessario avere
due o più superfici cilindriche distinte, come per il cavo coassiale e la linea
di trasmissione a fili paralleli.
6.4
Attenuazione lungo una guida d’onda reale
Finora abbiamo trattato il problema della propagazione di onde E.M. con
interessanti conseguenze, ma con ipotesi non fisiche, in particolare una: che
lo spessore del conduttore fosse eguale a zero. Chiediamoci quale sia l’effetto
di pareti metalliche di spessore finito, costituite da buoni conduttori metallici
(con ρ piccola, ma non nulla).
Il valore grande ma limitato della conducibilita’ σ del metallo fa si’ che
la profondita’ di pelle dello stesso, δ, sia diversa da zero, benche’ piccola, e
che, come conseguenza, il campo elettrico dell’ onda penetrando nella parete
metta in movimento gli elettroni di conduzione, liberi di muoversi con relativa
facilita’, dissipando per effetto Joule una parte della energia e.m. dell’ onda.
Nel caso delle guide d’onda ideali trattato fino ad ora E0z si annulla
sulla superficie, senza penetrare in essa. In realtà, si può dimostrare che, se
σ è grande, la costante di propagazione α conterrà dei piccoli termini addizionali, reali ed immaginari. Indicando, cioè, con α0 anzichè α, la costante
di propagazione nel caso della guida ideale trattata in precedenza, sarà:
α = α0 + ζλ + iβλ
(6.86)
dove ζλ è una correzione ininfluente, che diventa importante solo alla frequenza di taglio del modo considerato, dove α = 0, e βλ può essere considerato
come la costante di attenuazione della potenza trasmessa nella guida:
P (z) = P (0) e−2βλ z
(6.87)
ζλ e βλ dipendono dal particolare modo considerato. Si può dimostrare che
βλ è data dalla formula:
βλ =
s
i
ǫr 1 C (ν/νλ )1/2 h
ξλ + ηλ (ν/νλ )2
µr σδλ 2∆ 1 − ν 2
ν2
λ
(6.88)
103
6.5. CAVITÀ RISONANTI
dove νλ è la frequenza critica del modo considerato, corrispondente all’autovalore λ, C è la lunghezza del contorno della guida, ∆ la sezione della guida,
σ la conducibilità e δλ la profondità di pelle alla frequenza critica considerata, ξλ e ηλ numeri puri dell’ordine di grandezza dell’unità. Si fa notare che
ηλ per i modi T.M. è nulla.
Il calcolo dei parametri adimensionali ξλ e ηλ nella (6.88) può essere effettuato senza complicazioni di principio. Ad esempio, per la guida
rettangolare ed il modo T E01 , i valori sono ξ01 = a/(a+b) e η01 = 2b/(a+b).
Il comportamento di βλ in funzione di ν/νλ è rappresentato in figura
6.11. L’attenuazione minima si ha per una frequenza superiore a quella
Figura 6.11:
critica. Per i modi T.E. i valori relativi di ξλ e ηλ dipendono dal contorno
della guida e da λ, e quindi non è possibile fare considerazioni generali sulla
frequenza alla quale si ha l’attenuazione
√ minima. Per i modi T.M., invece, il
3 νλ . Ad alte frequenze l’attenuazione
minimo si ha sempre per νmin =
1/2
varia come ν . Come ordine di grandezza, in una guida con pareti di
rame βλ corrisponde ad una lunghezza di attenuazione dell’ordine di qualche
centinaio di metri (200–400 m) nella regione di frequenza delle microonde.
Va osservato che l’ approssimazione nella quale viene valutato il parametro
βλ come rappresentato nella figura (6.11) non e’ piu’ valida per frequenze
molto prossime al valore di taglio, ove βλ tende ad infinito sia per modi T.M.
che per modi T.E., cosa fisicamente impossibile.
6.5
Cavità risonanti
Affrontiamo ora il problema di studiare la risonanza di onde E.M. nel caso
tridimensionale. In altre parole chiediamoci se è possibile immagazzinare
104
CAPITOLO 6. GUIDE D’ONDA
l’energia E.M. in un volume delimitato da una superficie chiusa metallica
conduttrice. La risposta è affermativa e consideriamo per semplicità il caso
ideale già affrontato con le guide d’onda, e cioè spessore dei conduttori nullo
e conducibilità infinita. È immediato constatare che anche in questo caso la
condizione al contorno affinchè non ci sia dissipazione di energia per effetto
Joule è che in ogni punto della superficie chiusa sia soddisfatta la condizione
(6.16).
Consideriamo una guida d’onda di sezione rettangolare chiusa da due
piani perpendicolari all’asse z, posti nell’origine e ad una distanza d.
Come si è visto nel caso della guida d’ onda rettangolare, le componenti dei campi risultano essere stazionarie nelle dimensioni trasversali della
guida. Pensando di estendere la trattazione fatta in quel caso anche alla
terza dimensione, per ottenere onde stazionarie, e dunque confinamento, anche lungo l’asse z, si deve ipotizzare che nella cavita’ si abbiano dei campi
longitudinali del tipo:
Ez = E0z (x, y) [F sin rz + G cos rz]
Bz = B0z (x, y) [F sin rz + G cos rz]
(6.89)
(6.90)
(6.91)
nel caso di onde T.M. e T.E. rispettivamente, con E0z (x, y) dato dalla (6.39)
e B0z (x, y) dato dalla (6.47), e relazioni analoghe per le altre componenti dei
campi, in completa analogia con la trattazione delle guide d’ onda a sezione
rettangolare. E’ immediato verificare, allora, che r deve essere eguale a o π/d
con o numero intero e F e G devono essere posti eguali a zero rispettivamente
per onde T.M. e onde T.E., per evitare perdite ohmiche sulle pareti metalliche
poste in z = 0 e z = d. Gli autovalori relativi alle soluzioni (degeneri, come
noto) (6.91) saranno dati da:
λ2mno = π 2
m2
n2
o2
+
+
a2
b2
d2
!
(6.92)
corrispondenti alle frequenze:
νmno
c
=
√
2 ǫr µr
m2
n2
o2
+
+
a2
b2
d2
!1/2
ed alle autofunzioni, nel caso di onde T.M.:
nπ
oπ
mπ
x sin
y sin z
a
b
d
mπ
nπ
oπ
sin
x cos
y sin z
a
b
d
Ex = −i Cmno αmno cos
Ey = −i Cmno αmno
(6.93)
105
6.5. CAVITÀ RISONANTI
mπ
nπ
oπ
x sin
y cos z
a
b
d
nπ
oπ
mπ
x cos
y sin z
ǫr µr sin
a
b
d
mπ
nπ
oπ
ǫr µr cos
x sin
y sin z
a
b
d
Ez = Cmno λ2mno sin
Bx = i Cmno
By = −i Cmno
(6.94)
ovvero, nel caso di onde T.E.:
mπ
x
a
mπ
′
Ey = −i Cmno
kc sin
x
a
mπ
′
x
Bx = i Cmno
αmno sin
a
mπ
′
By = i Cmno
αmno cos
x
a
mπ
′
Bz = Cmno
λ2mno sin
x
a
′
Ex = i Cmno
kc cos
nπ
y
b
nπ
cos
y
b
nπ
cos
y
b
nπ
sin
y
b
nπ
sin
y
b
sin
oπ
z
d
oπ
sin z
d
oπ
sin z
d
oπ
sin z
d
oπ
sin z
d
sin
(6.95)
ove la soluzione completa sara’ data dal prodotto delle componenti (6.94) o
(6.95) per il fattore temporale e−iωt .
Notiamo due aspetti delle soluzioni trovate. Se paragoniamo la (6.93)
con la (4.15), notiamo che, mentre le onde libere possono avere qualsiasi
valore di ω, quelle risonanti in una scatola chiusa da pareti metalliche possono
avere soltanto valori discreti della frequenza, dipendenti dai tre interi m, n,
o. Ancora, ricordando la (6.37) si può considerare l’onda stazionaria in una
scatola come l’onda propagantesi in una guida con k esattamente uguale a
√
λmn / ǫr µr , e quindi vg = 0, con l’ulteriore condizione, per le componenti
trasversali, di avere un nodo per z = 0 e z = d.
É evidente dalle (6.94) che la condizione al contorno relativa alle
componenti tangenziali del campo elettrico (6.25) è soddisfatta in quanto
sulle pareti terminali, in z = 0 e z = d, le componenti E0x e E0y si annullano,
mentre la componente E0z , essendo perpendicolare a tali pareti, si attenua nel
metallo in base alla profondità di pelle δ del materiale specifico, idealmente
nulla. Si è ottenuta, adesso, una completa simmetrizzazione delle espressioni
delle componenti dei campi, come logico dal momento che in questo caso non
vi è più una direzione privilegiata, quella di propagazione.
Un ragionamento analogo vale anche per cavita’ risonanti a sezione
circolare, ottenute chiudendo una guida d’ onda circolare con due piani metallici perpendicolari all’ asse del cilindro e posti a distanza d uno rispetto
all’ altro. Le espressioni delle componenti dei campi potranno essere ottenute
da quelle della corrispondente guida d’ onda moltiplicandole per un termine
cos oπ
z o cos oπ
z in modo da ottenere la condizione di stazionarieta’ voluta
d
d
106
CAPITOLO 6. GUIDE D’ONDA
anche lungo l’ asse del cilindro, cioe’, per le componenti longitudinali dei
campi si avra’ esplicitamente:
oπ
z
d
oπ
= B0 Jn (λnj )[An cos nϕ + Bn sin nϕ] sin z
d
Ez = E0 Jn (λnj )[An cos nϕ + Bn sin nϕ] cos
(6.96)
Bz
(6.97)
(6.98)
per onde T.M. e T.E. rispettivamente, con l’ opportuno significato della
costante λnj in ciascun caso. I corrispondenti autovalori avranno espressione:
λ2mno
s
=
τnj
a
2
+
oπ
d
2
(6.99)
dove τnj indica lo zero della corrispondente funzione di Bessel di prima specie
(onde T.M.) o della sua derivata prima (onde T.E.) ed a indica il raggio della
sezione circolare della cavita’ cilindrica.
Come per il caso delle guide d’onda, una cavità reale, con spessore finito e conducibilità σ non infinita, non si comporterà come la schematizzazione
descritta. L’effetto che ci si può aspettare è che le frequenze di risonanza νmno
definite dalla (6.93) non siano esattamente definite, ma abbiano un certo allargamento, dovuto alla dissipazione dell’energia E.M. per effetto Joule sulle
pareti.
Per caratterizzare una cavità risonante si definisce il fattore di merito
o fattore Q, definito come:
energia immagazzinata nell′ interno della cavita′
=
energia persa per ciclo
energia immagazzinata nell′ interno della cavita′
= ω
(6.100)
energia persa per secondo
Q = 2π
Dal teorema della conservazione dell’energia, indicata con U, e dalla definizione di Q si ricava che:
dU
ωU
= −
dt
Q
(6.101)
da cui
U(t) = U(0) e
−ωt
Q
(6.102)
cioè se si immagazzina al tempo t = 0 l’energia U(0) nella cavità, essa decade esponenzialmente con una costante inversamente proporzionale a Q.
6.5. CAVITÀ RISONANTI
107
La (6.102) significa che le oscillazioni del campo elettrico nella cavità sono
smorzate con la legge:
−ωt
E(t) = E0 e 2Q e−iωt
(6.103)
in cui si è tenuto conto che U ∝ E 2 .
Ricordando la trattazione svolta per il dipolo oscillante smorzato (paragrafo 5.3) si trova in maniera del tutto analoga che la curva di risonanza
di una cavità è una Lorentziana del tipo:
| E(ω) |2 = cost ·
1
(ω − ω0 )2 + (ω0 /2Q)2
(6.104)
Il parametro ω0 /2Q determina, come è noto, la larghezza della Lorentziana,
e quindi una cavità sarà tanto più efficace quanto più Q è grande. Per
cavità con pareti di rame si arriva a valori di Q di 104 . Usando materiali
superconduttori (σ → ∞) si può arrivare a valori di Q 2–3 ordini di grandezza
superiori.
Capitolo 7
Generatori di onde EM
7.1
Il klystron
Per produrre onde E.M. nell’intervallo 1–100 GHz (microonde), l’uso di una
antenna lineare in risonanza non è efficiente e risulta anzi impossibile produrre potenze notevoli. Il motivo è molto semplice. La lunghezza d dell’antenna
deve essere un multiplo intero della semilunghezza dell’onda, e quindi da
qualche cm a qualche mm. Per rimanere nell’approssimazione dell’antenna
lineare (spessore trascurabile rispetto alla lunghezza), si dovrebbero utilizzare dei fili sottili, nei quali è impossibile far circolare correnti di intensità
massima I0 , che determinano, con una dipendenza quadratica (5.89, 5.90),
la potenza emessa.
I generatori di microonde sono basati sul principio della modulazione
di un intenso fascio di elettroni, ed i più comunemente usati nelle applicazioni
sono il Klystron e il Magnetron. Il principio di funzionamento del klystron,
che descriveremo brevemente nel seguito, fu realizzato nel 1935 dai fratelli
Varian e questo generatore, con i miglioramenti tecnologici apportati nel
corso degli anni, è in uso ancora oggi.
Un klystron (vedi figura 7.1) è costituito nelle sue parti essenziali da
un cannone elettronico, una struttura di interazione tra il fascio elettronico
e campi E.M. delle frequenze che si vogliono produrre, ed un collettore. Il
cannone elettronico, composto da un catodo e da un sistema di elettrodi di
focalizzazione, tra i quali sono applicate opportune differenze di potenziale statiche, consente la formazione di un pennello, generalmente di sezione
circolare, costituito da elettroni le cui traiettorie, a meno delle forze di repulsione tra essi, coincidono con le linee del campo elettrico; grazie all’ elevata
intensità del campo accelerante, il raggio del pennello è, in genere, più piccolo
di quello del catodo.
108
109
7.1. IL KLYSTRON
Figura 7.1:
La struttura di interazione consente uno scambio energetico tra il pennello di elettroni e i campi a radiofrequenza presenti in essa. La più semplice
schematizzazione di una struttura di interazione è costituita da due o più
gap sedi di campi elettrici variabili nel tempo (chiamati in gergo campi a
radiofrequenza) diretti secondo la direzione del moto degli elettroni. Un gap,
con un campo elettrico del tipo anzidetto, viene comunemente realizzato mediante una cavità risonante in cui, con un opportuno modo di oscillazione
(in genere quello TM010), si crea, in una regione compresa tra due griglie
parallele (il cosiddetto spazio di interazione), un campo elettrico a radiofrequenza avente direzione ortogonale a esse. Il segnale a radiofrequenza alla
prima cavità è applicato in genere mediante un cavo coassiale o una guida
d’onda. Nell’attraversare il gap la velocità degli elettroni viene modulata e
questa modulazione di velocità si traduce in una modulazione dell’intensità
del fascio di elettroni all’uscita del primo gap. La modulazione di velocità
impressa dal segnale a radiofrequenza al fascio elettronico può essere visualizzata ricorrendo a un particolare diagramma delle traiettorie elettroniche
(diagramma di Applegate, vedi figura 7.2). In esso sono riportate, in funzione del tempo, le distanze dal primo gap di un numero rappresentativo di
elettroni (in questo caso 24 per ogni ciclo di radiofrequenza) e l’ampiezza
della tensione a radiofrequenza applicata al primo gap.
Gli elettroni che attraversano il gap nell’intervallo di tempo in cui
la tensione a radiofrequenza ad esso applicata è accelerante aumentano la
loro velocità; viceversa, gli elettroni che transitano nel semiperiodo successivo riducono la loro velocità. Le variazioni di velocità sono visualizzate nel
diagramma mediante variazioni di pendenza delle traiettorie degli elettroni;
laddove molte traiettorie s’intersecano si ha un addensamento di elettroni.
110
CAPITOLO 7. GENERATORI DI ONDE EM
Figura 7.2:
La modulazione di velocità, generata dal primo gap, comporta una modulazione dell’intensità del fascio di elettroni. I pacchetti di elettroni in moto,
attraversando il gap della seconda cavità, posta ad una opportuna distanza
dalla prima per ottenere la massima modulazione di densità (si veda più oltre), inducono nel gap cariche di segno opposto, che danno luogo ad una vera
e propria corrente circolante. Se si considera, infatti, il gap di una cavità
risonante, la presenza di un pacchetto di elettroni dà luogo, sulle due griglie,
a cariche indotte che vanno variando di intensità con lo spostamento del pacchetto; tale variazione è ottenuta per passaggio di corrente sulle pareti della
cavità. Alla risonanza, la cavità di uscita rappresenta un carico puramente
resistivo e quindi la tensione a radiofrequenza che si stabilisce nel gap risulta
ritardante per i pacchetti di elettroni. In queste condizioni il pennello cede
energia al campo a radiofrequenza della cavità di uscita a spese dell’ energia
posseduta dal pennello, con una cadenza temporale stabilita dal periodo del
segnale applicato alla cavità di ingresso.
Il rapporto tra la potenza del segnale di uscita dalla seconda cavità
e il segnale di ingresso nella prima cavità viene denominato guadagno G
del klystron a due cavità. Esso raggiunge valori tra 10 e 20 dB. Questo
guadagno non è da confondere con il guadagno di energia globale del sistema,
ovviamente <1. L’energia “sprecata” è data dal prodotto dell’intensità della
corrente del cannone elettronico (che può arrivare a qualche kA), per la
differenza di potenziale statico applicata al cannone (fino a 100 kV ), cioè
qualche 107 W , e l’efficienza dei klystron migliori non arriva a più di 30-40%.
Si ottengono cioè potenze di campo E.M. in uscita fino a 10 MW , certamente
non da trascurare!
111
7.1. IL KLYSTRON
Figura 7.3:
Vediamo ora di trattare analiticamente il problema della modulazione
di velocità degli elettroni. Si consideri il gap della cavità di ingresso di un
klystron a due cavità, schematizzato in figura 7.3, in cui il fascio del cannone
elettronico sia accelerato da una differenza di potenziale V0 ; sia d la distanza
tra le griglie e A sin ωt la tensione modulante, di pulsazione ω, applicata tra
esse. Si scelga un sistema di riferimento costituito da un asse diretto secondo
il moto degli elettroni, con l’origine O coincidente con la griglia di ingresso.
Il campo Ez , esistente nel gap per effetto della tensione applicata, esercita sui
singoli elettroni di carica −e e massa m, che l’attraversano, la forza −eEz ,
cui corrisponde una accelerazione:
d2 z
eEz
= −
2
dt
m
(7.1)
da cui (si veda la figura 7.3):
eA
d2 z
=
sin(ωt)
2
dt
dm
(7.2)
Integrando rispetto a t e denotando con t0 l’istante in cui l’elettrone di
velocità u0 attraversa la prima griglia, si ottiene:
dz
eA
= u0 −
[cos(ωt) − cos(ωt0 )]
dt
ωdm
(7.3)
La velocità u0 è data da:
u0 =
2eV0
m
1/2
(7.4)
in cui V0 è la differenza di potenziale statico applicata tra anodo e catodo
del cannone elettronico. Nell’ipotesi che l’ampiezza A della tensione a radiofrequenza sia piccola rispetto a V0 , si può allora assumere che il tempo
112
CAPITOLO 7. GENERATORI DI ONDE EM
di transito degli elettroni nel gap sia approssimabile a quello che si avrebbe
per la presenza della sola tensione continua. È da sottolineare che il tempo
di transito che interessa non è quello relativo al percorso catodo–anodo del
cannone elettronico, ma quello relativo allo spazio compreso tra le due griglie
di ogni cavità; data la vicinanza delle due griglie tale tempo è, almeno per
onde di frequenza fino a circa 100 GHz, molto minore del periodo dell’onda di
lavoro. Se si indica con t1 l’istante in cui l’elettrone si trova in corrispondenza
del centro del gap e con t2 l’istante in cui l’elettrone attraversa la seconda
griglia, si ha:
t0 = t1 −
d
,
2u0
t2 = t1 +
d
2u0
(7.5)
La velocità dell’elettrone all’uscita del gap del modulatore, u(d), può essere
valutata sostituendo nella (7.3) t con t2 :
2eA
ωd
u(d) = u0 +
sin
ωmd
2u0
!
sin(ωt1 )
Definendo come coefficiente di accoppiamento M il rapporto sin
e utilizzando la (7.4), si ottiene:
(7.6)
ωd
2u0
u(d) = u0 [1 + MA sin(ωt1 )/2V0 ]
/
ωd
2u0
(7.7)
M tende ad 1 per tempi di transito nel gap prossimi allo zero, a 0 per tempi
di transito nel gap grandi. Gli elettroni, dopo aver superato il primo gap, si
muovono in una zona di campo elettrico nullo. Indicando con l la distanza
tra i centri del primo e del secondo gap, il tempo di arrivo dell’elettrone nella
seconda cavità risulta:
t3 − t1 = l/ {u0 [1 + MA sin(ωt1 )/2V0 ]}
(7.8)
Considerato che A/V0 << 1, la (7.8) può essere approssimata a:
t3 − t1 =
ossia, indicando
l
[1 − MA sin(ωt1 )/2V0 ]
u0
l
u0
come tt e
l MA
u0 2V0
t3 = t1 + tt − Y sin(ωt1 )
(7.9)
come Y , a:
(7.10)
La rappresentazione grafica della (7.10) è data in figura 7.4 per diversi valori
di Y (0.5, 1.0, 1.5). È evidente l’impacchettamento: per Y ≥ 1, ad un valore
di t3 corrispondono due valori di t1 , cioè gli elettroni che hanno attraversato
il primo gap a tempi t1 diversi arrivano al secondo gap allo stesso tempo t3 .
113
7.1. IL KLYSTRON
Figura 7.4:
Da notare che valori di Y ≥ 1 si ottengono con l sufficientemente elevati,
dato che M < 1 e VA0 << 1. Si è soliti indicare il fattore Y , moltiplicato per
ω, come parametro di impacchettamento X, in una relazione ottenuta dalla
(7.8) moltiplicata per ω, ed in cui, anzichè i tempi, sono definiti gli angoli di
fase all’ingresso, ωt1 , e al secondo gap, ωt3 .
Si può dimostrare che l’ intensità della corrente indotta sulle pareti
della cavità di uscita è pari al prodotto del coefficiente di accoppiamento del
gap e della ampiezza della corrente modulata del pennello elettronico. Tale corrente, a causa dell’ azione modulante della tensione a radiofrequenza
applicata, è una funzione periodica che può essere espressa come somma delle sue varie armoniche, le cui ampiezze mostrano una notevole dipendenza
dal parametro di impacchettamento X. La corrente indotta risulta, perciò, a
sua volta avere una struttura periodica con le stesse armoniche della radiofrequenza, ma, grazie ad una opportuna ottimizzazione dei parametri geometrici
ed elettrici della struttura, una intensità molto maggiore. La struttura fin
qui descritta si comporta fondamentalmente come un amplificatore di radiofrequenze; per ottenere il funzionamento del klystron a due cavità come
generatore di oscillazioni persistenti è sufficiente connettere fra l’ ingresso e
l’ uscita un tratto di cavo coassiale o di guida d’ onda lungo quanto basta
per avere tra le correnti a radiofrequenza delle due cavità la relazione di fase
necessaria e sufficiente per l’ innesco (dovuto ai modi termici della cavita’) e
il mantenimento delle oscillazioni.
Le realizzazioni di una struttura risonante ad impacchettamento di
elettroni tipo klystron possono assumere configurazioni diverse, in relazione
alle potenze che si vogliono ottenere. Se si vuole massimizzare la potenza,
conviene usare non una ma due o più cavità oscillatrici per convertire l’ener-
114
CAPITOLO 7. GENERATORI DI ONDE EM
gia dei fasci di elettroni modulati in intensità in energia E.M.. Si possono
costruire klystron in continua con potenze di uscita superiori al MW e con
rendimenti del 40% circa.
Figura 7.5:
Nell’intervallo di frequenze 1–100 GHz, in alternativa, si possono realizzare klystron con una sola cavità (modulatore e oscillatore) deflettendo
all’indietro gli elettroni tramite un elettrodo (lente elettrostatica) polarizzato positivamente, posto ad una distanza circa eguale alla metà della distanza
in cui sarebbe stata posta la seconda cavità; tali dispositivi prendono il nome
di klystron reflex e la loro struttura è schematizzata in figura 7.5. Chiaramente il rendimento di un klystron reflex è basso (<10%): esso arriva a fornire
potenze piuttosto modeste (fino a circa 1 W) ed è stato particolarmente usato
come eterodina in ricevitori radar.
Figura 7.6:
I klystron di potenza elevata sono utilizzati per applicazioni in tecniche
radarimetriche e di accelerazione di particelle. È da notare che l’installazione
7.1. IL KLYSTRON
115
base per accelerare un fascio di particelle (indipendente dal tipo di acceleratore, circolare o lineare) è quella schematizzata in figura 7.6. Nel klystron
abbiamo una corrente di elettroni molto elevata I (kA), con differenze di potenziale “basse” (100 kV), nella cavità risonante il fascio di particelle viene
accelerato con incrementi di energia fino a 10 MV·q, essendo q la carica della
particella accelerata, ma con intensità del fascio inferiori ad 1 A. Il sistema
klystron–guida d’onda–cavità è quindi assimilabile ad un trasformatore, che
opera però attraverso campi E.M. risonanti. L’efficienza di questo “trasformatore” (<20%) è peraltro molto più bassa di quella di un trasformatore
normale per corrente alternata, vicina al 100%.
I generatori di microonde a potenze molto minori, inclusi quelli per
i fornetti a microonde di uso domestico, sono di solito del tipo magnetron,
non descritti per brevità.
Capitolo 8
Fibre ottiche
8.1
Considerazioni generali
Nelle telecomunicazioni il trasferimento di informazione è generalmente eseguito mediante una modulazione di un’onda E.M. che agisce da vettore dell’informazione stessa. La quantità di informazione che può essere trasferita
è legata alla cosiddetta banda passante che è un intervallo di frequenze ∆ν0
centrato attorno alla frequenza ν0 dell’onda portante. È quindi evidente che,
maggiore la frequenza ν0 , maggiore sarà la quantità di informazione trasmessa, nell’ipotesi di ∆ν0 /ν0 costante. Passando da ν0 ≃ 107 Hz (radioonde)
a ν0 ≃ 1010 Hz (microonde) a ν0 ≃ 1014 Hz (visibile) si guadagnano
3 o, rispettivamente, 7 ordini di grandezza nella quantità di informazione
trasferita.
Da questa considerazione, legata ad altre di carattere economico (reperibilità dei materiali) e di sicurezza, ha avuto origine lo studio e quindi
l’utilizzo delle fibre ottiche per trasmettere, con poca attenuazione, segnali a
grandi distanze.
La prima trattazione teorica della propagazione della luce in cilindri
dielettrici risale al 1910. Soltanto dopo il 1950 le fibre ottiche incominciarono
a trovare delle applicazioni pratiche nel campo della trasmissione di immagini
lungo fasci flessibili di fibre. La prima proposta di utilizzo delle fibre ottiche
nel campo delle comunicazioni ottiche risale al 1966. La ragione di ciò va
ricercata nel fatto che l’attenuazione da cui erano afflitte le fibre di vetro fino
a quel tempo era superiore alle centinaia di dB/km. Inoltre le sorgenti ed i
rivelatori di luce non erano ottimizzati e compatibili (laser e fotodiodi erano
agli albori). Nel decennio 1966–1976 si realizzarono i progressi tecnologici
decisivi. Fu dimostrato che l’attenuazione dei materiali vettori utilizzati per
le fibre ottiche non è una proprietà intrinseca del materiale, ma è dovuta
116
8.2. TRASMISSIONE DI SEGNALI IN FIBRE OTTICHE
117
alla presenza di impurità, soprattutto ioni metallici. Usando tecnologie di
purificazione e deposizione di silice pura, si ottennero attenuazioni sempre
minori (vedi figura 8.1).
Figura 8.1:
Nel 1976 ricercatori giapponesi riuscirono a fabbricare una fibra con un
bassissimo contenuto di ioni OH − e attenuazioni minori di 0.47 dB/km, molto
vicine alle perdite intrinseche del materiale (diffusione di Rayleigh). La figura
8.2 mostra la curva di attenuazione per una fibra ottica in materiale vetroso.
Dalla figura appare chiaro che conviene lavorare nell’intervallo di lunghezze
d’onda 800–1500 nm, cioè nell’infrarosso, dove la diffusione di Rayleigh (si
ricorda che l’attenuazione dovuta a questo fenomeno è proporzionale a ω 4 ,
cioè a 1/λ4 ) è ridotta. Siamo cioè nell’infrarosso e, nel corso degli anni, si
è passati successivamente da lunghezze d’onda di lavoro di 850, 1300 e 1550
nm, denominate rispettivamente prima, seconda e terza finestra. Oggi le
comunicazioni avvengono quasi esclusivamente mediante fibre monomodali
(vedi in seguito) operanti nella terza finestra (1550 nm).
8.2
Trasmissione di segnali in fibre ottiche
Premettiamo che il fenomeno fisico utilizzato per trasmettere segnali ottici
a grandi distanze è quello della riflessione totale. È ben noto che un raggio
luminoso, incidendo sull’interfaccia tra due mezzi con indici di rifrazione n1
e n2 , con n1 > n2 e provenendo dal mezzo n1 , subisce riflessione totale,
senza rifrazione, se l’angolo di incidenza θi con la normale alla superficie di
118
CAPITOLO 8. FIBRE OTTICHE
Figura 8.2:
separazione tra i due mezzi è maggiore o eguale al cosiddetto angolo limite
θL , definito dalla relazione:
n2
(8.1)
sin θL =
n1
Figura 8.3:
Consideriamo il sistema rappresentato in figura 8.3, costituito da un
cilindro di materiale vetroso di raggio r1 e indice di rifrazione n1 , detto nocciolo, contornato da un cilindro cavo, sempre di materiale vetroso, di raggio
8.2. TRASMISSIONE DI SEGNALI IN FIBRE OTTICHE
119
interno r1 , raggio esterno r2 ed indice di rifrazione n2 , con n1 > n2 , chiamato
mantello. Il mantello è racchiuso da una guaina opaca di materiale plastico.
Premettiamo anzitutto che esistono tre tipi di configurazione in cui la
luce può trasmettersi per riflessione totale e che sono dette:
• a) le guide di luce, con r1 dell’ordine del cm, costituite solo dal nucleo,
solitamente di materiale plastico;
• b) le fibre multimodali, con r1 dell’ordine di 30 µm e r2 dell’ordine di
60 µm;
• c) le fibre monomodali, con r1 dell’ordine di 5 µm e r2 dell’ordine di 60
µm.
Le guide di luce sono usate per trasmettere a distanze dell’ordine di
1–5 m i segnali luminosi prodotti dal passaggio di particelle ionizzanti in opportuni materiali (gli scintillatori) a rivelatori optoelettronici (fotomoltiplicatori, fotodiodi). Le fibre multimodali sono usate per trasmettere immagini
lungo cammini incurvati, sempre dell’ordine di 1–5 m. Le fibre monomodali
sono usate per trasmettere segnali nell’infrarosso per telecomunicazioni fino a
distanze di 100 km, senza amplificazione. Per trasmettere a lunghe distanze
(intercontinentali) è necessario, ogni 100 km circa, introdurre un amplificatore ottico (una fibra attiva, che funziona secondo i principi del laser e che
non viene qui descritta).
Vediamo che cosa c’è di comune tra questi tre sistemi e dove differiscono. Riferendoci sempre alla figura 8.3, che rappresenta il caso più semplice di
una fibra a step index (salto di indice di rifrazione, rappresentato graficamente a destra nella figura), vediamo le semplici considerazioni che si possono
trarre nelle ipotesi di validità dell’ottica geometrica. Consideriamo per semplicità raggi luminosi meridiani, che si propaghino, cioè sul piano contenente
l’asse z della fibra. Le considerazioni possono essere ripetute anche per raggi
sghembi, in cui le traiettorie sono molto più complesse, ma le conclusioni non
molto diverse.
Il raggio luminoso indicato in figura viene immesso nel nocciolo della
fibra attraverso la superficie di separazione aria (indice di rifrazione n0 )–
vetro (indice di rifrazione n1 ) e verrà rifratto secondo la ben nota legge di
Snellius Cartesio:
n0 sin θi = n1 sin θt
(8.2)
avendo indicato come al solito con θt l’angolo formato dal raggio rifratto
con la normale alla superficie nel punto di incidenza. Il raggio prosegue fino
all’interfaccia con il mantello, dove subisce riflessione totale se l’angolo θL è
120
CAPITOLO 8. FIBRE OTTICHE
≥ al valore dell’angolo limite (8.1). Si ricava quindi immediatamente dalle
(8.1) e (8.2) che l’angolo θi massimo per cui i raggi luminosi si propagano
nella fibra per riflessione totale, ponendo n0 = 1 per semplicità, è dato da:
π
θi = arcsin(n1 sin θt ) = arcsin n1 sin
− θL
=
2
q
= arcsin(n1 cos θL ) = arcsin n1 1 − sin2 θL
= arcsin
q
q
=
n21 − n22
(8.3)
La quantità n21 − n22 viene comunemente definita apertura numerica (N.A.)
della fibra e il suo arcoseno rappresenta l’angolo di apertura del cono entro
cui i raggi incidenti vengono trasmessi per riflessione totale.
Se questa fosse l’unica considerazione riguardante la trasmissione totale, è evidente che converrebbe operare con N.A. il più grande possibile,
riducendo il sistema al solo nocciolo, con anche n2 ≃ 1 (aria). È quanto
avviene per le guide di luce. In realtà un’altra considerazione, riguardante i
tempi di arrivo dei segnali luminosi, dimostra che converrebbe lavorare con
N.A. → 0. Questa circostanza si può verificare supponendo di immettere
ad un certo istante t0 un certo numero di fotoni in z = 0 e valutando la
dispersione dei tempi di arrivo dopo aver percorso una lunghezza L di fibra
rettilinea. Il cammino percorso dai fotoni che si muovono lungo l’asse è il minore, quello dei fotoni che vengono riflessi secondo θL il maggiore. Indicando
con l1 e l2 questi cammini (distanze percorse dai raggi luminosi) si ha:
l1 = L;
l2 =
L
;
sin θL
l2 − l1 = ∆L = L
1
−1
sin θL
(8.4)
Ricordando che la velocità di propagazione nel nocciolo è v = c/n1 , la differenza di tempo tra il fotone che ha percorso il cammino 1 e quello che ha
percorso il cammino 2 è:
Ln1
1
∆L
−1 =
=
∆t =
v
c
sin θL
Ln1 n1
Ln1
=
−1 =
(n1 − n2 )
c
n2
cn2
(8.5)
Come vedremo, nelle fibre ottiche per telecomunicazioni è n1 ≃ n2 e quindi
si può approssimare:
(N.A.)2 = (n21 − n22 ) = (n1 + n2 )(n1 − n2 ) ≃ 2n1 (n1 − n2 )(8.6)
da cui, sostituendo nella (8.5), si ha:
L(N.A.)2
∆t =
2cn2
(8.7)
8.3. L’APPROSSIMAZIONE DELL’ICONALE
121
Il tempo ∆t, chiamato di solito dispersione modale, aumenta con il quadrato
di (N.A.). Per ottenere una piccola dispersione modale è necessario ricorrere, a differenze (n1 − n2 ) molto piccole, dell’ordine di (1–2)% di n1 ed
utilizzare altri artifici (fibre ad indice graduato, trasmissione monomodale)
per ottenere il risultato cercato. Prima di discutere questi ulteriori aspetti
è però necessario ricordare alcune proprietà importanti della propagazione
della luce in un dielettrico trasparente.
8.3
L’approssimazione dell’iconale
Le leggi dell’ottica geometrica sono valide nell’ipotesi che le dimensioni spaziali degli oggetti che la luce incontra siano molto maggiori della sua lunghezza d’onda λ. Quando, invece, esse sono dell’ordine di grandezza di λ, i
fenomeni che si osservano (diffrazione, interferenza) possono essere spiegati
soltanto con l’equazione della propagazione ondosa. Verifichiamo che dalle
equazioni delle onde è possibile ricavare le leggi dell’ottica geometrica.
Nel Capitolo 4 era stato dimostrato che una qualsiasi delle componenti
~
~ indicata per semplicità con f , e per una frequenza determinata ω,
di E e B,
soluzione della (4.3), era esprimibile dalla (4.20), che qui riscriviamo come:
~
f = f0 eik0
·~
r
e−iωt = ψ e−iωt
(8.8)
ψ soddisfa l’equazione per la parte spaziale (4.12).
Supponiamo ora che la propagazione avvenga in un mezzo materiale
isotropo non dispersivo di indice di rifrazione costante n = c/v. È immediato
verificare che l’equazione di propagazione è sempre la (4.3), in cui però al
posto di 1/c2 si ha 1/v 2 = n2 /c2 . La (4.12) diventa allora:
∇2 ψ1 + ω 2
n2
ψ1 = 0
c2
(8.9)
Se n = cost, la soluzione sarà simile alla (8.8), ma con k1 = k0 n al posto di
k0
~
ψ1 = f0 eik1 ·~r
(8.10)
Facciamo ora l’ipotesi che n non sia più una costante, ma una funzione del
posto, n(x, y, z), la cui variazione sia però molto lenta su distanze paragonabili alla lunghezza d’onda λ dell’onda di frequenza angolare ω. La (8.9)
diventa allora:
∇2 ψ1 + ω 2
n2 (x, y, z)
ψ1 = 0
c2
(8.11)
122
CAPITOLO 8. FIBRE OTTICHE
Si può provare a soddisfare la (8.11) con una funzione del tipo:
ψ1 = f0 eik0
S(x,y,z)
(8.12)
supponendo per semplicità che sia ancora f0 costante ed S reale. Osservando
che si ha:
∂ 2 ψ1
∂S
= −k02 f0
2
∂x
∂x
!2
eik0
S
+ ik0 f0
∂ 2 S ik0
e
∂x2
S
(8.13)
e analogamente per le derivate parziali rispetto a y e z, sostituendo nella
(8.9) si deduce:
ik0 f0 ∇2 Seik0
S
− k02 f0 (∇S)2 eik0
S
+ k02 n2 f0 eik0
S
= 0
(8.14)
Dividendo la (8.14) per k02 = 4π 2 /λ20 si ottiene:
f0 eik0
S
h
i
(∇S)2 − n2 −
if0 λ0 ik0 S 2
e
∇S = 0
2π
(8.15)
Introducendo ora l’ipotesi dell’ottica geometrica, e cioè che sia λ0 → 0, la
(8.15) si riduce a:
(∇S)2 = n2
(8.16)
detta anche equazione dell’iconale, attribuendo questo nome alla funzione
S. La (8.16) può essere considerata l’ equazione fondamentale dell’ ottica
geometrica. Dalla (8.12) appare chiaro il significato fisico dell’iconale. Le
superfici S(x, y, z) = cost rappresentano le superfici di eguale fase, in altre
parole i fronti d’onda nel mezzo di indice di rifrazione variabile n(x, y, z). È
noto che nelle onde piane, in un mezzo con n = cost, i raggi luminosi sono
ortogonali ai fronti d’onda. È intuitivo ammettere che anche nel caso di n
variabile il raggio luminoso passante per un punto di un fronte d’onda sia
ortogonale ad esso. Indicando con ~us il versore ortogonale alla superficie S,
si avrà:
∇S = | ∇S | ~us = n~us
(8.17)
Moltiplicando scalarmente la (8.17) per ~us , ed indicando con s la coordinata
curvilinea del raggio passante per S(x, y, z), si ha:
dS
= n
ds
(8.18)
di cui si deduce chiaramente il significato fisico. Dati due fronti d’onda vicini,
S = cost e S + dS = cost, la distanza ds tra queste due superfici è in ogni
punto inversamente proporzionale a n. Nelle regioni dello spazio in cui è
123
8.3. L’APPROSSIMAZIONE DELL’ICONALE
n=cost., le superfici d’ onda sono tra di loro parallele, ovvero la distanza
ds è costante e le linee s sono rette, ossia, in quelle regioni la propagazione
della luce è rettilinea. Il concetto di iconale permette quindi di estendere
anche al caso di n variabile la rappresentazione con raggi luminosi, non più
rettilinei. È possibile dimostrare rigorosamente le (8.17) e (8.18) partendo
dallo sviluppo in serie da Taylor della funzione iconale nell’intorno di un
punto.
R
L’ integrale γ n dl lungo un tratto di curva γ è detto lunghezza ottica
di γ o cammino ottico. Se consideriamo due punti P1 e P2 appartenenti ad
una stessa linea s avremo:
Z
P2
Z
n ds = c
P1
P2
dt = S(P2 ) − S(P1 )
P1
(8.19)
dove dt è il tempo che impiega la luce a percorrere la distanza ds lungo la
linea s. Il tempo che impiega la luce a percorrere la linea s da P1 a P2 sarà:
Z
P2
dt =
P1
1
c
Z
P2
P1
n ds =
1
(S(P2 ) − S(P1 )) .
c
(8.20)
Vogliamo confrontare questo tempo con quello che la luce impiegherebbe per
andare da P1 a P2 lungo un’ altra linea γ, che non sia una linea s. Osserviamo
che è anche:
Z
Z P2
dS
dγ =
dS = S(P2 ) − S(P1 ).
dγ
P1
P2
P1
(8.21)
Ma, indicando con ~uγ il versore della linea γ:
dS
= ∇S · ~uγ ≤ |∇S| = n
dγ
(8.22)
Perciò si ottiene:
Z
P2
n ds = S(P2 ) − S(P1 ) =
P1
Z
P2
P1
dS
dγ ≤
dγ
Z
P2
P1
n dγ
(8.23)
Inoltre, deve essere:
dS
<n
dγ
(8.24)
= n e quindi
almeno in qualche punto di γ perchè sennò si avrebbe sempre dS
dγ
γ sarebbe, contrariamente all’ ipotesi fatta, una linea s. In conclusione:
1
c
Z
P2
P1
1
n ds <
c
Z
P2
P1
n dγ.
(8.25)
124
CAPITOLO 8. FIBRE OTTICHE
É questa la formulazione del famoso principio di Fermat, che si può esprimere
dicendo che tra tutti i possibili percorsi che potrebbe compiere per andare
da P1 a P2 la luce sceglie quello (linea s) che richiede il minor tempo. Da
questo principio si possono facilmente ricavare le leggi della riflessione e della
rifrazione e generare quelle conclusioni che formano il corpus dell’ ottica
geometrica.
8.4
Le formule di Fresnel
Ricaveremo ora le formule di Fresnel, molto importanti per calcolare le potenze trasmesse e riflesse quando un fascio luminoso incide sulla superficie di
separazione tra due mezzi materiali dielettrici. Si suppone che la superficie
sia liscia ed i mezzi materiali omogenei, isotropi e non dispersivi. La trattazione potrebbe essere quella generale relativa ad un onda E.M. di frequenza
angolare ω qualsiasi. Ci limiteremo al caso ottico per semplificare i calcoli
e l’interpretazione dei risultati. Supporremo valide le equazioni di Snellius–
Cartesio (che si potrebbero anche ricavare come premessa delle equazioni di
Fresnel), che le permeabilità magnetiche relative dei due mezzi siano = 1 e
√
√
che quindi n1 = ǫr1 = c/v1 , n2 = ǫr2 = c/v2 .
I raggi incidente i, riflesso r e trasmesso (o rifratto) t, saranno rappresentati dalle onde piane:
~i = E
~ 0i cos(ωt − ~ki · ~r)
E
(8.26)
~r = E
~ 0r cos(ωt − ~kr · ~r)
E
(8.27)
~t = E
~ 0t cos(ωt − ~kt · ~r)
E
(8.28)
Per le ipotesi fatte e facendo riferimento alla figura 8.4, θi = θr , n1 sin θi =
n2 sin θt , | ~ki |=| ~kr |= ωn1 /c, | ~kt |= ωn2 /c ed i raggi i, r e t stanno nello
stesso piano, contenente anche la normale ~un alla superficie di separazione
nel punto di incidenza, orientata verso il mezzo 2. Tale piano e’ detto piano
di incidenza. Vogliamo ricavare le relazioni tra i valori E0i , E0r e E0t nell’ipotesi che nel punto di incidenza le fasi dell’onda incidente, riflessa e rifratta
coincidano. Tale ipotesi e’ necessaria per poter applicare le condizioni al
contorno che devono valere in ogni punto della superficie e per ogni istante,
per cui la legge di variazione spazio–temporale di tutti i campi deve essere la
stessa. Supponiamo ancora che l’onda incidente sia linearmente polarizzata
~ 0i = cost ). Qualunque sia l’orientazione di E
~ 0i , potremo sempre scomporlo
(E
in due vettori, uno parallelo e l’altro ortogonale al piano di incidenza, e considerare solo queste due situazioni, senza ledere la generalità della trattazione.
8.4. LE FORMULE DI FRESNEL
125
È noto che, come conseguenza delle (6.3)– (6.6), all’interfaccia tra i due mezzi
~ e di H
~ = B/µ
~ 0 µr tangenziali, ossia
1 e 2 sono continue le componenti di E
parallele alla superficie di separazione tra i due mezzi. Nella semplificazione
~ (da notare bene
fatta (µr = 1), ciò significa le componenti tangenziali di B
la differenza rispetto a mezzi con µr 6= 1, soprattutto ferromagnetici !!).
Consideriamo separatamente i due casi.
~ 0i perpendicolare al piano di incidenza.
• A) E
Figura 8.4:
Si ricava immediatamente:
E0i + E0r = E0t
(8.29)
−B0i cos θi + B0r cos θi = −B0t cos θt
(8.30)
ricordando anche che in un mezzo materiale è B = nE/c, la (8.30)
diviene:
cos θi (E0i − E0r )n1 = n2 E0t cos θt
(8.31)
Dividendo le (8.29) e (8.31) per E0i e ponendo:
r⊥ = E0r /E0i
t⊥ = E0t /E0i
(8.32)
126
CAPITOLO 8. FIBRE OTTICHE
dove r e t rappresentano i coefficienti di riflessione e trasmissione (rifrazione) per le ampiezze, le (8.29) e (8.31) si riducono a:
1 + r⊥ = t⊥
(8.33)
n1 (1 − r⊥ ) cos θi = n2 t⊥ cos θt
(8.34)
che, risolte, forniscono:
r⊥ =
n1 cos θi − n2 cos θt
n1 cos θi + n2 cos θt
(8.35)
t⊥ =
2n1 cos θi
n1 cos θi + n2 cos θt
(8.36)
~ 0i parallelo al piano di incidenza.
• B) E
Figura 8.5:
Riferendoci ora alla figura 8.5, si verifica che si deve ora porre:
E0i cos θi − E0r cos θi = E0t cos θt
(8.37)
B0i + B0r = B0t
(8.38)
8.4. LE FORMULE DI FRESNEL
127
da cui si ricava, in maniera del tutto analoga al caso A):
rk =
n2 cos θi − n1 cos θt
n1 cos θt + n2 cos θi
(8.39)
tk =
2n1 cos θi
n1 cos θt + n2 cos θi
(8.40)
Le equazioni (8.35), (8.36), (8.39) e (8.40) costituiscono le formule di
Fresnel, applicabili in maniera generale a tutti i mezzi isotropi, omogenei e
non dispersivi. Si fa notare che esse sono applicabili alle specifiche direzioni
dei campi ipotizzati in partenza, cioè le fasi (i versi dei vettori) sono state
scelte arbitrariamente e le formule di Fresnel calcolate per quella configurazione. Nei casi A e B è stata scelta una orientazione “giusta”; se se ne
fosse scelta una sbagliata, sarebbe comparso un valore negativo per r o t,
ad indicare che uno dei campi andava ruotato di π. In particolare, nel caso
di incidenza normale alla superficie di separazione tra i due mezzi, il campo
elettrico risultera’ avere solo componente parallela ad essa e percio’ le relazioni per i coefficienti di riflessione e trasmissione saranno date dalle (8.35) e
(8.36) con cos θi = cos θt = 1. Dalla (8.35), in tal caso, si puo’ osservare
che, posto che gli indici di rifrazione di due mezzi siano diversi, n1 6= n2 , cioe’
che si abbia effettivamente una interfaccia tra mezzi otticamente differenti, si
ha comunque una componente di campo elettrico riflessa indietro, e pertanto
anche un fascio riflesso. Inoltre, se n1 < n2 , il coefficiente di riflessione r
risulta essere negativo, ad indicare che il campo elettrico dell’ onda riflessa
risulta essere sfasato di π rad rispetto a quello dell’ onda incidente. Tali
osservazioni, evidenti per incidenza normale, risultano vere anche per θi 6= 0
rad.
Le equazioni di Fresnel possono essere ancora scritte eliminando gli
indici di rifrazione n1 e n2 con la legge di Snellius–Cartesio. Si ottiene, con
qualche passaggio:
sin(θi − θt )
sin(θi + θt )
tan(θi − θt )
rk =
tan(θi + θt )
2 sin θt cos θi
t⊥ =
sin(θi + θt )
2 sin θt cos θi
=
sin(θi + θt ) cos(θi − θt )
r⊥ = −
tk
(8.41)
128
CAPITOLO 8. FIBRE OTTICHE
Delle (8.41) è particolarmente significativa ed interessante la seconda, che
permette di ricavare e definire l’angolo di Brewster. Si vede che se (θi +
θt ) = π/2, rk = 0, cioè la luce riflessa è totalmente polarizzata in un piano
perpendicolare al piano di incidenza. L’angolo di Brewster, tramite la solita
legge di Snellius–Cartesio, è dato dalla relazione:
n2
θB = arctan
(8.42)
n1
Le equazioni di Fresnel definiscono i coefficienti di riflessione e trasmissione
dei campi, mentre nelle applicazioni si è interessati ai coefficienti di riflessione
di potenza R (o riflettanza) e di trasmissione di potenza T (o trasmittanza),
definiti come:
potenza rif lessa
(8.43)
R =
potenza incidente
T =
potenza trasmessa
potenza incidente
(8.44)
Per calcolare R e T , riferiamoci alla figura (8.5), ma immaginando di
avere anzichè un raggio incidente, un fascio di luce incidente sull’interfaccia
tra i due mezzi, e che definisce su di essa un’area σ. Le sezioni dei fasci
incidente e riflesso saranno evidentemente σ cos θi e quella del fascio trasmesso
σ cos θt . Il vettore di Poynting in un mezzo materiale di indice di rifrazione
n e µr = 1 è dato dall’espressione:
~ ×B
~
~ = 1 E
S
µ0
~ 2
~|= |E| n
|S
cµ0
(8.45)
ed il valore medio su un periodo dell’ onda risulta:
2
~ |> = 1 E0 n
<| S
2 cµ0
(8.46)
La potenza media dei fasci incidente, riflesso e trasmesso sarà data
~ |> per le rispettive sezioni. Sarà quindi:
dal prodotto di <| S
~ |>r σ cos θi
<| S
E0r 2
R =
=
= r2
~ |>i σ cos θi
E0i
<| S
~ |>t σ cos θt
n2 cos θt
<| S
=
~ |>i σ cos θi
n1 cos θi
<| S
n2 cos θt 2
=
t
n1 cos θi
T =
E0r
E0i
(8.47)
2
(8.48)
129
8.4. LE FORMULE DI FRESNEL
Figura 8.6:
in cui r e t vanno intesi o con i pedici k e ⊥ oppure come una media di essi.
Si può verificare che R + T = 1 in ciascun caso. La figura 8.6 rappresenta
~ 0i perpendicolare al piano di incidenza, per
l’andamento di R e T nel caso di E
due mezzi materiali costituiti dal materiale vetroso del nocciolo e del mantello
di una fibra in cui n1 = 1.461, n2 = 1.457, tipici di fibre monomodali. È anche
evidente che per θi > θL si ha R = 1, T = 0 (riflessione totale). A questo
proposito notiamo un aspetto particolare della propagazione per riflessione
totale, che è poi forse il fattore determinante per la trasmissione in fibra
ottica. Per θi = θL l’onda trasmessa si propaga parallelamente alla superficie
di separazione e non c’è trasporto di energia attraverso la superficie stessa.
Che cosa succede per θi > θL ?
Dalla formula di Snellius–Cartesio, per θi > θL = arcsin nn12 si ricava:
sin θt =
n1
sinθi
sinθi =
>1
n2
sin θL
avendo indicato con β la quantita’ β =
complesso con un coseno immaginario:
cos θt =
q
1 − sin2 θt =
sin θt =
sin2 θi
sin2 θL
s
q
1 + β2
(8.49)
− 1 e, cioè, che θt è un angolo
s
sin2 θi
sin2 θi
1−
=
±i
− 1 = ±iβ(8.50)
sin2 θL
sin2 θL
L’ onda piana che si propaga nel secondo mezzo sarà rappresentata da un
campo elettrico:
~t = E
~ 0t ei(ωt−~km ·~r) = E
~ 0t eiω(t− v1 ~s·~r)
E
(8.51)
130
CAPITOLO 8. FIBRE OTTICHE
dove ~km è il vettore d’ onda nel mezzo di indice di rifrazione n2 , ~s è il suo
versore e v è la velocità dell’ onda nel mezzo meno rifrangente. Dato che:
s
sinθi
sin2 θi
−1 + z
2
sin θL
sin θL
z
sinθi
sin θL
~s · ~r = x cos θt + z sin θt = ±ix
(8.52)
si avrà:
h
iωt −i ±ix
~t = E
~ 0t e
E
e
~ 0t e−km
= E
x
q
q
sin2 θi
−1+
sin2 θL
sin2 θi
−1
sin2 θL
h
iω t− vz
e
i
km
sinθi
sin θL
i
(8.53)
dove si è scelto il segno negativo nell’ espressione di cosθt . Questa risulta
essere un’ onda con una ampiezza che decresce esponenzialmente al crescere
di x, che si propaga lungo z, ossia parallelamente alla superficie di separazione
tra i due mezzi; essa dunque penetra nel mezzo meno rifrangente e viene detta
onda evanescente. Si può osservare che la parte reale della fase spaziale può
ω
essere scritta, usando la (8.50), come e−xβ v , da cui si ricava che la distanza
v
λm
caratteristica di decadimento dell’ ampiezza dell’ onda è data da ωβ
= 2πβ
,
dove λm è√la lunghezza d’ onda
nel
mezzo
meno
rifrangente.
Se,
per
esempio,
√
n1 /n2 =r 2, θL = arcsin 2 = 45◦ ; per un angolo di incidenza θi = 46◦ si
2
n1
ha β =
sinθi − 1 = 0.187 e la distanza di decadimento risulta circa
n2
0.8λm .
√
Si può verificare che dalla posizione sin θt = 1 + β 2 segue che i coefficienti di riflessione diventano delle quantità complesse di ampiezza unitaria:
di conseguenza, la potenza media riflessa dall’ unità di superficie risulta uguale alla corrispondente potenza media incidente, cosicchè il potere riflettente
è R = 1. Pertanto, sebbene ci sia un’ onda al di là dell’ interfaccia, non c’é
un flusso netto di energia se mediato nel tempo. A questa stessa conclusione
si arriva anche esaminando il vettore di Poynting, che ha una componente
ortogonale alla superficie puramente immaginaria.
8.5
Propagazione modale nelle fibre ottiche
Vediamo ora di capire come avvenga la propagazione della luce in una fibra
secondo modi discreti in analogia alla guida d’onda. Riferendoci alla figura
(8.3) il cammino spezzato 2, secondo l’ottica geometrica, può essere pensato
come risultante di una propagazione lungo l’asse, caratterizzata da una costante di fase β analoga alla costante α (6.13) introdotta nelle (6.14) e (6.15)
ed una configurazione stazionaria lungo la direzione ortogonale che soddisfi
le condizioni al contorno.
8.5. PROPAGAZIONE MODALE NELLE FIBRE OTTICHE
131
Con un procedimento del tutto analogo a quello seguito per la guida
d’onda a contorno circolare, si possono esprimere i campi E0z e B0z in coordinate cilindriche e verificare che essi devono soddisfare alle due equazioni
(6.57) e (6.58). In questo caso, però, le condizioni al contorno da imporre
~ e di D
~ e quella delle
saranno la continuità delle componenti normali di B
~ e di H
~ sulla superficie di separazione tra nucleo
componenti tangenziali di E
e mantello, al posto delle (6.59) e (6.60).
L’autovalore λ viene di solito indicato con il simbolo βt , chiamato
costante di fase trasversa. Le differenze nascono ora. In questo caso, infatti,
si avranno due coppie di equazioni, una valida nel nocciolo, dove l’ autovalore
sarà dato da βt2 = ǫr1 µr1 k 2 − β 2 , e l’ altra nel mantello, dove l’ autovalore
sarà dato da βt2 = ǫr2 µr2k 2 − β 2 . La costante di propagazione assiale, β, deve
essere la stessa in entrambi i mezzi affinchè le condizioni al contorno sulla
superficie di separazione siano soddisfatte in tutti i punti e per tutti i valori
del tempo t.
Nel nocciolo si deve ottenere la propagazione di un’onda che trasporti
energia: questo comporta, da un punto di vista matematico, di richiedere
che βt sia reale, nel qual caso la soluzione fisicamente accettabile delle (6.57)
e (6.58) è data, come visto per le guide d’ onda a sezione circolare, dalle
funzioni di Bessel di prima specie Jn (βt r); nel mantello si deve ottenere la
propagazione di un’onda evanescente e questo comporta di richiedere che
βt sia immaginario, nel qual caso la soluzione fisicamente accettabile delle
(6.57) e (6.58) è data dalle funzioni modificate di Neumann Kn (βt′ r), con βt′
pari al modulo di βt , rappresentate in figura F.4 per due valori di n insieme
alle funzioni modificate di Bessel In . Appare chiaro dalla figura che solo le
funzioni di Neumann modificate possono rappresentare un’onda evanescente,
di ampiezza decrescente.
Nel nocciolo si ha allora:
βt2 = k 2 n21 − β 2 > 0, che comporta β < kn1
(8.54)
Nel mantello si ha invece:
βt2 = k 2 n22 − β 2 < 0, che comporta β > kn2
(8.55)
Cioé sarà
kn2 < β < kn1 .
(8.56)
Per ottenere le soluzioni volute occorrerà ora imporre le succitate condizioni al contorno, il che implica imporre l’eguaglianza della funzione di Bessel di ordine n ed argomento (βt r) e della funzione di Neumann modificata,
sempre di ordine n e argomento (βt′ r), per r = r1 e delle loro derivate prime
132
CAPITOLO 8. FIBRE OTTICHE
rispetto a r. Si otterranno cosı̀ due insiemi discreti di valori di n e di (βt r1 ),
radici di un sistema di equazioni trascendenti che non vengono riportate, che
permetteranno di caratterizzare i modi di propagazione guidata o modi guidati della fibra secondo una classificazione analoga a quella dei modi della
guida circolare.
Indicando con n l’ ordine delle funzioni di Bessel e di Neumann modificate che soddisfano contemporaneamente le (6.57) e (6.58) e le condizioni
al contorno, se n = 0 è possibile distinguere soluzioni di tipo T.M. e T.E.:
T.M.01 e T.E.01 che non dipendono dall’ angolo ϕ. Se, invece, n ≥ 1, le soluzioni non possono essere separate nei due gruppi T.M. e T.E., dato che sia
Ez che Bz sono sempre diversi da zero: si parla allora di modi ibridi. Nella
approssimazione di debole effetto guidante, sempre ben verificata in pratica,
che n1 ≃ n2 , ovvero che ∆ = (n1 − n2 )/n1 ≃ 0, è possibile distinguere due
gruppi di soluzioni a seconda del segno scelto per la soluzione della equazione trascendente dovuta alle condizioni al contorno. Tali gruppi sono indicati
~ è relativamente
come EH, per i cui modi la componente assiale del vettore B
~ è relativamente
forte, e HE per i cui modi la componente assiale del vettore E
forte.
I modi di propagazione in una fibra ottica possono, cosı̀ essere classificati secondo quattro classi generali: T.M.01 , T.E.01 , EHnp ed HEnp . Nei
modi ibridi, il primo pedice indica l’ ordine della soluzione, il secondo il numero d’ ordine del valore dell’ autovalore βt che permette di soddisfare le
condizioni al contorno. Tutti i modi caratterizzati da una stessa coppia di
valori di n e p hanno la stessa costante di propagazione β; la combinazione
lineare di tali modi degeneri viene detta modo linearmente polarizzato LPqp ,
con q = 1 per i modi T.M. e T.E., q = n + 1 per i modi EH e q = n − 1 per
i modi HE. Per i modi polarizzati linearmente il primo pedice rappresenta
il numero di nodi azimutali presenti nella distribuzione del campo elettrico
del modo, il secondo il numero di nodi radiali. Tali modi possono essere
identificati osservando la distribuzione della intensità luminosa in uscita da
una fibra, come indicato in figura (8.7), dove si assume che lo zero del campo elettrico al bordo estremo della distribuzione sia contato come un nodo,
cosicchè p ≥ 1, mentre per i nodi azimutali q ≥ 0.
Una quantità importante nel determinare quali modi E.M. vengano
supportati da una fibra ottica è un parametro chiamato numero d’ onda
normalizzato o anche V-number. Esso è definito come:
V = k0 · r1 · NA
(8.57)
dove k0 è il numero d’ onda nel vuoto e r1 e’ sempre il raggio del nocciolo
della fibra; il V-number rappresenta una particolare combinazione delle tre
8.5. PROPAGAZIONE MODALE NELLE FIBRE OTTICHE
133
Figura 8.7:
quantità coinvolte, caratteristica della specifica fibra considerata. Se si graficano le costanti di propagazione β in funzione del V-number, in analogia con
la figura (6.2) introdotta per le guide d’ onda, risulta semplice determinare il
numero di modi che possono essere fatti propagare in una particolare fibra.
Nella figura (8.8) tale grafico viene riportato per alcuni modi HE ed EH di
basso numero d’ ordine. Il numero di modi che si propagano è determinato
dal numero di curve che intersecano una linea verticale tracciata in corrispondenza del V-number della fibra in questione. Per fibre con V < 2.405 (si
ricorda che 2.405 corrisponde al primo zero della J0 ) solo un modo si propagherà nella fibra: questa è la regione delle fibre a singolo modo o monomodali.
La lunghezza d’ onda per la quale V = 2.405 è chiamata lunghezza d’ onda
di cut-off, λc , perchè per un particolare valore del prodotto r1 · NA, al crescere della λ della radiazione, questa è la lunghezza d’ onda alla quale tutti i
modi di ordine superiore sono esclusi in quanto per essi risulta β < kn2 , per
cui βt e’ reale e il campo non è più confinato entro il nucleo, e solo il modo fondamentale si propaga nella fibra: una fibra che propaghi solo il modo
HE11 è una fibra monomodale. Il modo di ordine più basso HE11 consiste di
due modi LP01 con direzioni di polarizzazione perpendicolari tra di loro. La
figura (8.9) riporta le costanti di propagazione dei modi LP in funzione del
134
CAPITOLO 8. FIBRE OTTICHE
Figura 8.8:
V-number. Quando V > 2.405 il modo linearmente polarizzato successivo,
Figura 8.9:
LP11 può essere supportato dalla fibra, cosicchè entrambi i modi LP01 e LP11
propagheranno la stessa frequenza. Per una fibra con V-number 3.832 (primo
zero della J1 ) si aggiungono due ulteriori modi LP: LP21 e LP02 . Si tende ora
al regime di propagazione multimodale: le fibre multimodali utilizzate nelle
telecomunicazioni hanno r1 = 25 µm e NA=0.20 o r1 = 50 µm e NA= 0.30,
cosicchè, per una radiazione con λ = 633 nm il V-number risulta essere 50
o 150 rispettivamente, cosa che corrisponde ad un elevato numero di modi
trasmessi per riflessione totale, come si può intuire pensando di estendere
opportunamente l’ asse orizzontale della figura (8.9).
Come si può osservare dalla figura (8.7), i modi di ordine maggiore
hanno una distribuzione di energia che tende via via ad allontanarsi dall’
asse della fibra; in altri termini, i raggi degli ordini superiori passano più
8.5. PROPAGAZIONE MODALE NELLE FIBRE OTTICHE
135
tempo in prossimità dell’ interfaccia nucleo-mantello ed i loro campi evanescenti si estendono maggiormente entro il mantello, causando una maggiore
attenuazione. Inoltre, se la fibra viene incurvata, i raggi con angoli grandi
rispetto all’ asse della stessa non possono più soddisfare la condizione dell’
angolo critico e non verranno riflessi totalmente all’ interno. Poichè una parte della potenza di questi modi viene irradiata entro il mantello ed aumenta
l’ attenuazione, tali modi vengono detti modi radiativi.
Nelle fibre multimodali, poi, data la compresenza di molti modi, la
dispersione modale diventa troppo elevata, almeno per fibre a salto d’indice.
È possibile ovviare a questo inconveniente abbandonando l’ipotesi, mantenuta fino ad ora, di n1 costante nel nocciolo (le soluzioni delle equazioni
di Maxwell possono essere ottenute analiticamente solo per le fibre a salto
di indice), ma ipotizzando una variazione di n1 con r tale da compensare
la dispersione modale. Esempi di graduazione dell’indice di rifrazione sono
riportati in figura 8.10.
Figura 8.10:
Da notare che si tende a lasciare sempre una piccola discontinuità
in corrispondenza all’interfaccia nocciolo–mantello, per avere comunque una
trasmissione per modi. Ricordando l’approssimazione dell’iconale, è possibile
immaginare che i raggi luminosi percorrano traiettorie come quelle indicate
in figura 8.11. Più i raggi si allontanano dall’asse della fibra e più aumenta
la loro velocità , in quanto si trovano in zone in cui n1 è localmente minore.
Sarebbe possibile , utilizzando l’equazione dell’iconale, trovare una forma di
n(r) per cui tutti i raggi impiegano lo stesso tempo e quindi la dispersione
modale è nulla. Si fa notare che, siccome ad un indice di rifrazione minore
per r maggiori corrisponde anche un angolo di rifrazione maggiore, in questa
ipotesi, più che di una trasmissione risonante, sarebbe il caso di parlare di
una lente continua che esercita una sorta di “focheggiamento” continuo del
fascio luminoso. È evidente che la realizzazione di una guida multimodale ad
“indice graduato perfetto” è impossibile, e anche una graduazione semplice,
come quella lineare rappresentata in figura 8.10 b), e che pure si dimostra
136
CAPITOLO 8. FIBRE OTTICHE
Figura 8.11:
molto efficiente (è in grado di diminuire la dispersione modale di 3 ordini
di grandezza), comporta costi economici di realizzazione molto elevati. Per
questo motivo le fibre multimodali hanno applicazioni soprattutto per la trasmissione di immagini e di segnali (laser) su piccole distanze lungo cammini
curvi (endoscopie, microchirurgia).
Le fibre monomodali, a semplice salto d’indice, sono invece ideali per
la trasmissione a lunga distanza, in cui una dispersione modale minima è un
requisito fondamentale. Anche il loro costo di fabbricazione è contenuto.
Capitolo 9
Ottica coerente
9.1
Elementi di Ottica coerente
Si è visto nei capitoli 6, 7 e 8 l’importanza dei fenomeni di risonanza nella
produzione, trasmissione ed utilizzazione delle onde E.M.. L’utilizzo di sistemi risonanti ottimizza le prestazioni, rispetto a quanto si otterrebbe con
l’uso di sistemi non–risonanti. Ci si può chiedere se l’utilizzo di sistemi risonanti rappresenti quanto di meglio si possa ottenere o se esistano ancora
altre peculiarità, non ancora prese in esame, delle onde E.M. che potrebbero
ulteriormente ottimizzare la risposta degli strumenti progettati per diversi
scopi. La risposta è affermativa e la proprietà che non abbiamo ancora preso
in esame è la cosiddetta coerenza, cioè l’effetto di un’onda E.M. su diversi
sistemi elementari (atomi) con una fase costante. In effetti, abbiamo sempre
trascurato nelle trattazioni precedenti la fase iniziale, in quanto ininfluente.
Nelle operazioni di media eseguite per valutare gli effetti misurabili (vettore
di Poynting, Lorentziana, ...) non resta traccia della fase iniziale. Il risultato più spettacolare ottenuto con l’applicazione simultanea dei fenomeni di
risonanza e coerenza è stato ottenuto nella costruzione di generatori di onde
E.M. (MASER nel campo delle microonde, LASER nel campo dell’infrarosso, visibile, ultravioletto) che non possono essere descritti in questo Corso
in quanto necessitano di elementi di Meccanica Quantistica. Le onde emesse
(ci limiteremo al campo del visibile) hanno intensità e soprattutto coerenza
di ordini di grandezza superiori a quelli delle normali sorgenti luminose e
mentre l’aspetto “intensità” è facilmente spiegabile nelle applicazioni come
metodo della forza bruta, l’aspetto coerenza è più interessante dal punto di
vista fisico.
Tratteremo quindi alcuni problemi in cui l’uso di luce coerente permette di ottenere risultati inaspettati. L’interferenza luminosa, assieme alla
137
138
CAPITOLO 9. OTTICA COERENTE
diffrazione, è la manifestazione più caratteristica della natura ondulatoria della luce. Rispetto ad altri fenomeni di propagazione ondosa (tipo il suono), la
realizzazione di dispositivi interferenziali ottici è peraltro più complessa, proprio per l’impossibilità di ottenere due sorgenti luminose, monocromatiche,
che emettano le onde luminose agganciate in fase. Ciò è legato alla natura
stessa delle sorgenti luminose. Un fascio luminoso proveniente da una sorgente monocromatica S è in realtà la sovrapposizione di un numero enorme di
treni d’onda elementari, la cui lunghezza ct (o ct/n se in un mezzo materiale)
è di circa 3 m, in relazione al fatto che il tempo in cui viene emesso tale treno
d’onde è 10−8 s, il tempo tipico di diseccitazione di un atomo. I processi di
emissione di atomi eguali, ma appartenenti a sorgenti diverse, sono scorrelati,
e quindi i treni d’onda provenienti dalle due sorgenti sono privi di qualsiasi
relazione di fase costante. Le sorgenti sono cioè incoerenti. Il trucco per ottenere due sorgenti luminose coerenti è quello di ottenere, tramite opportuni
sistemi ottici, due immagini virtuali S1 e S2 della stessa sorgente S, che a
questo punto diventano coerenti in quanto ogni treno d’onda emesso da S
viene diviso in due treni d’onda che, percorrendo cammini ottici diversi, si
incontrano in un punto dando luogo a fenomeni interferenziali.
É noto che in un P punto in cui si incontrino due raggi luminosi
provenienti da S1 e S2 sarà:
E~1 = E~01 cos(ωt − ~k · ~r1 )
(9.1)
E~2 = E~01 cos(ωt − ~k · ~r2 )
(9.2)
dove ~r1 è la distanza del punto P misurata dalla sorgente S1 e ~r2 quella dalla
sorgente S2 . Poichè si sta osservando la sovrapposizione dei due campi in P ,
~k · ~r1 e ~k · ~r2 sono due costanti. Per il principio di sovrapposizione si avrà che
il campo elettrico risultante sarà la somma di (9.1) e (9.2):
~ 02 cos(ωt − ~k · ~r2 )
~ = E~01 cos(ωt − ~k · ~r1 ) + kE
E
(9.3)
L’intensità del campo nel punto considerato sarà proporzionale al quadrato
della (9.3) ed è noto che, a causa del doppio prodotto, l’intensità non sarà
costante al variare del punto di intersezione dei
q raggi considerato, ma, supponendo E01 e E02 uguali, varierà tra 4I0 = 4 (ǫ0 /µ0 )E02 /2 e 0. Si avrà un
massimo quando | ~r1 − ~r2 | è uguale ad un multiplo pari di λ/2, un minimo quando è uguale ad un multiplo dispari di λ/2. È da notare che, in un
dispositivo interferenziale con S sorgente tradizionale, | ~r1 − ~r2 | non deve
essere maggiore di 3 m, altrimenti i trenini elementari andrebbero fuori fase.
Le caratteristiche degli interferometri più comuni (specchi di Fresnel, fenditure di Young, interferometro di Newton, interferometro di Michelson) sono
9.1. ELEMENTI DI OTTICA COERENTE
139
compendiate in figura 9.1 che aiuta anche a capire perchè, a seconda delle
diverse sistemazioni, si osservino fenomeni apparentemente diversi (anelli,
frange diritte, frange storte).
I massimi e i minimi di interferenza, costruiti attorno alle due sorgenti
virtuali S1 e S2 , sono iperboloidi di rotazione con i fuochi nelle due sorgenti,
e con equazione | ~r1 − ~r2 | = 2kλ/2 per i massimi e | ~r1 − ~r2 | = (2k +
1)λ/2 per i minimi. La figura 9.1 mostra in maniera pittorica una sezione
di tali iperboloidi con un piano che contiene le due sorgenti S1 e S2 (le
curve continue indicano gli iperboloidi corrispondenti ai massimi di intensità,
quelle tratteggiate gli iperboloidi corrispondenti ai minimi); osservandola si
può comprendere come, a seconda delle diverse sistemazioni, si osservino
fenomeni apparentemente diversi (anelli, frange diritte, frange storte). Un
interferometro, infatti, intercetterà, generalmente in un piano, una frazione
di queste famiglie di iperboloidi e la figura di interferenza osservata varierà
a seconda della posizione di questo piano. Nell’interferometro di Newton il
piano di osservazione è ortogonale alla retta S1 S2 e quindi si osserveranno
delle circonferenze; in quello di Young il piano è parallelo alla retta S1 S2
e quindi si osserveranno degli archetti, approssimabili a segmenti; per gli
specchi di Fresnel il piano è sghembo rispetto alla retta S1 S2 e perciò si
osserveranno ancora degli archetti. Il caso più importante è però quello
dell’interferometro di Michelson, che verrà descritto in dettaglio nel seguito.
Figura 9.1:
140
9.2
CAPITOLO 9. OTTICA COERENTE
L’interferometro di Michelson
Di tutti i dispositivi interferenziali escogitati, l’interferometro di Michelson
è certamente il più ingegnoso ed utile in molti esperimenti di Fisica fondamentale ed applicata. Il vantaggio principale di questo interferometro è che
esso è in grado di misurare spostamenti di oggetti materiali dell’ordine di
qualche 10−8 m. Con l’avvento dei laser, in grado di fornire treni d’onda
di lunghezza superiore di 103 − 104 ordini di grandezza rispetto alle normali
sorgenti luminose, l’interferometro di Michelson è diventato uno strumento
di routine per misure di precisione in diverse branche delle scienze pure ed
applicate. Ideato allo scopo di eseguire una misura fondamentale di Fisica
(l’esistenza dell’etere) esso continua ad essere utilizzato per ambiziosi esperimenti di Fisica fondamentale (l’esperimento VIRGO, che dovrebbe rivelare
l’esistenza di onde gravitazionali). Descriviamo il principio di funzionamento
dello strumento, schematizzato in figura 9.2.
Figura 9.2:
La sorgente luminosa S è posta nel fuoco di una lente, o di un sistema
ottico centrato più complesso, che trasforma i raggi luminosi in un fascio
parallelo. Il fascio incide su una lastra piana parallela con la superficie posteriore debolmente metallizzata, sı̀ da fungere da specchio semiriflettente,
che è chiamato divisore del fascio. Il divisore trasforma il fascio incidente in
due fasci, di eguale intensità (più o meno!), uno riflesso e l’altro trasmesso,
che si propagano in direzioni ortogonali. I due fasci incontrano a distanze
d1 e d2 dal centro del divisore, due specchi piani ortogonali ai fasci, P1 e
9.2. L’INTERFEROMETRO DI MICHELSON
141
P2 , totalmente riflettenti. I fasci riflessi ripercorrono all’indietro i cammini,
riattraversano il divisore, questa volta con sorte opposta (il fascio S1 , che
prima era stato trasmesso, ora viene riflesso, e l’opposto accade per il fascio
S2 ) e, con intensità pari al 25% del fascio iniziale S, si sovrappongono dando
luogo a fenomeni di interferenza osservabili col cannocchiale C.
Esaminiamo anzitutto che cosa ci aspettiamo come figure di interferenza. Supponiamo di disporre di un interferometro di Michelson ideale, cioè
senza aberrazioni, distorsioni, ecc.. Ricordando la figura 9.1 è facile riconoscere che stiamo osservando all’infinito, l’interferenza di due sorgenti virtuali
coerenti poste all’infinito, ad una distanza relativa d1 − d2 . Se d1 = d2 , si
dovrebbe osservare interferenza costruttiva all’infinito e quindi un massimo
di intensità luminosa. Ad essere pignoli, in questa situazione non si ha lo
stesso cammino ottico (il fascio S1 attraversa la lastra del divisore una volta,
il fascio S2 tre volte) ma la configurazione può essere corretta in modo da
eliminare, o per lo meno ridurre il più possibile le differenze tra i due cammini
(inserendo una lastra trasparente dello stesso materiale e spessore del divisore
lungo il tratto tra il divisore e P1 , per esempio). In realtà, sperimentalmente,
è molto più semplice montare lo specchio P1 (o P2 ) su un dispositivo a viti
micrometriche che permette di variare la distanza d1 . Si osserverà cosı̀ il
passaggio da campo chiaro a campo oscuro per uno spostamento di λ/4.
In realtà questo metodo non è il più sensibile, perchè l’occhio umano
o altro strumento di misura dell’intensità luminosa non è molto sensibile
al valore assoluto dell’intensità. È più conveniente inclinare leggermente la
superficie di P2 ed ottenere un sistema di frange chiare e scure sull’oculare
del cannocchiale. È intuitivo capire che, spostando uno specchio di λ/4, si
otterrà lo spostamento del sistema di frange: dove c’era una frangia chiara
ora ci avrà una frangia scura.
La limitazione dell’interferometro di Michelson con S sorgente tradizionale sta nel fatto che | d1 − d2 |< 3 m, altrimenti non si otterrà più
l’interferenza dei due trenini d’onda ottenuti dal divisore. I due bracci devono essere eguali (o quasi) e questo limitava l’uso a misure di laboratorio,
ben termostato. Variazioni termiche locali nei due bracci possono comunque
falsare i risultati delle misure. Con treni d’onda dell’ordine del km è possibile
osservare fenomeni interferenziali con | d1 − d2 |< 1 km. Il braccio con S1
quindi può essere costituito da uno specchio S1 molto vicino al divisore e ad
esso solidale. S2 può essere, invece, piazzato a grande distanza (ad es. su
una diga, per studiarne le deformazioni, o sul terreno, per studiare le maree
terrestri).
142
9.3
CAPITOLO 9. OTTICA COERENTE
L’esperimento di Michelson e Morley
L’ipotesi di Maxwell e di tutti i fisici dell’epoca (seconda metà ’800) era che
dovesse esistere un mezzo materiale, chiamato etere (o etere luminifero) che
era il supporto materiale delle onde E.M.. L’etere pervadeva tutto lo spazio e
l’ipotesi più plausibile era che fosse solidale con il sistema delle stelle fisse. La
Terra, nel suo moto di rivoluzione attorno al Sole, con velocità v ≃ 30 km/s,
si muoveva quindi con velocità v rispetto all’etere, mentre la luce si propagava
con velocità c rispetto all’etere indipendentemente dal fatto che la sorgente
fosse in quiete o meno rispetto ad esso.
Questo ultimo aspetto è una conseguenza delle EqM, le quali prevedono l’ esistenza di onde E.M. che si propagano con la stessa velocità in tutte
le direzioni in un mezzo omogeneo (c o c/n) senza esplicitare una dipendenza
dall’ eventuale stato di moto della sorgente che le emette. Proprio questo
aspetto contrasta con quanto previsto dal Principio di relatività galileiana,
per il quale vale la legge di composizione delle velocità in meccanica classica.
L’ ipotesi della esistenza dell’ etere poneva l’ elettromagnetismo come una
branca a parte della Fisica e implicava che le sue leggi non fossero invarianti
per trasformazioni galileiane. Dal punto di vista di tali trasformazioni, sarebbe dunque dovuto esistere un sistema di riferimento privilegiato, l’ etere
appunto, nel quale la velocità della luce nel vuoto risultasse essere c e, di conseguenza, in altri sistemi di riferimento la velocità della luce avrebbe dovuto
essere diversa da c.
Un considerevole numero di fatti sperimentali condussero all’ abbandono dell’ ipotesi dell’ etere ed alla nascita della relatività speciale (Einstein
1905). Fra questi fatti si possono citare l’ aberrazione della posizione di una
stella nel corso dell’ anno, l’ esperimento di Fizeau sul trascinamento della luce in un fluido in moto (1859), che qui non verranno descritti, ma soprattutto
l’ esperimento di Michelson e Morley, descritto brevemente nel seguito.
Disponendo di uno strumento molto sensibile (l’interferometro di Michelson) doveva essere possibile misurare la velocità della Terra v rispetto
all’etere solidale con il Sole (il cosiddetto vento d’etere), sfruttando l’ effetto
che tale v avrebbe dovuto produrre sulla velocità di propagazione della luce
rispetto ad un osservatore solidale con la Terra e quindi non con il sistema
privilegiato dell’ etere. Supponiamo di orientare l’interferometro in modo che
esso si muova lungo la retta DP1 con velocità v e sia ∆t1 il tempo impiegato
dalla luce a percorrere la distanza DP1 D per un osservatore solidale all’interferometro. La luce si propaga rispetto all’etere con velocità c nel tratto DP1
e l’apparato si muove lungo la stessa direzione con velocità v. La velocità
della luce relativa all’apparato è (c − v) e il tempo impiegato a percorrere la
distanza l è l/(c − v). Abbiamo, per semplicità, posto d1 = d2 = l. L’opposto
9.3. L’ESPERIMENTO DI MICHELSON E MORLEY
143
accade nel percorso di ritorno P1 D, la velocità della luce relativa all’apparato
è (c+v) ed il tempo l/(c+v). Il tempo totale impiegato dalla luce per andare
da D a P1 e poi tornare in D per l’osservatore solidale con l’interferometro
sarà quindi:
∆t1 =
l
l
2l
1
+
=
c−v
c+v
c 1 − v22
c
(9.4)
Da notare che, se l’apparato fosse fermo rispetto all’etere, ∆t1 sarebbe 2l/c.
Determiniamo ora il cammino percorso dal raggio DP2 D ed il tempo ∆t2
impiegato a percorrerlo rispetto all’osservatore.
In figura 9.3 sono rappresentate tre posizioni di D e P2 , indicate con
gli apici, corrispondenti agli istanti in cui la luce lascia il punto D, raggiunge
lo specchio nel punto P2′ e quindi ritorna in D ′′ .
Figura 9.3:
Osservando che:
c2
∆t2
2
2
= v2
∆t2
2
2
+ l2
(9.5)
si ha:
∆t2 = √
2l
2l
1
=
2
c 1 − v2 1/2
−v
2
c
(9.6)
c2
La differenza tra i tempi impiegati nei due percorsi ∆τ = ∆t1 − ∆t2 è:
∆τ = ∆t1 − ∆t2
2l
v2
=
1− 2
c
c
!−1
v2
− 1− 2
c
!−1/2
(9.7)
144
CAPITOLO 9. OTTICA COERENTE
Poichè v/c << 1 sviluppando le parentesi in serie binomiale arrestata al
secondo termine si ha:
2l
∆τ =
c
"
v2
1 + 2 + ...
c
!
−
v2
1 + 2 + ...
2c
!#
=
lv 2
c3
(9.8)
Se l’interferometro, che in alcuni esperimenti galleggiava in una vasca di
mercurio per evitare le più piccole vibrazioni che avrebbero potuto inficiare i risultati, viene ruotato di π/2, il cammino DP2 D diventa parallelo a v
e DP1 D ortogonale. Anche il ritardo tra le due onde che arrivano al cannocchiale è invertito. Questo provoca uno sfasamento tra le onde che interferiscono e i massimi (e minimi) si spostano. L’esperimento, in sostanza,
consiste nell’osservare uno spostamento delle frange, quando si ruota di π/2
l’apparato.
La variazione della differenza di tempo è 2∆τ , che corrisponde ad uno
spostamento di frange 2∆τ /T = 2∆τ c/λ. La variazione ∆N del numero di
frange è quindi:
2l
2∆τ
=
∆N =
T
λ
2
v
c
(9.9)
Nel caso del primo esperimento di Michelson e Morley si aveva l = 11 m
(ottenuti mediante riflessioni multiple) e λ = 590 nm e quindi ci si aspettava
uno spostamento di frange ∆N ∼ 0.4, con una precisione dello strumento
σ∆N di circa un ordine di grandezza inferiore. Tale spostamento non fu
osservato, contraddicendo la teoria dell’etere: in qualche punto della sua
orbita la Terra ha una velocità rispetto all’ etere di almeno 104 m/s (la sua
velocità orbitale) che l’ apparato avrebbe dovuto rilevare! Ma non fu neanche
osservato ∆N ∼ 0, come viene spesso riportato nei libri, bensı̀ ∆N ∼ 0.15!
Il motivo era che non si erano tenuto in conto tanti fattori correttivi, tipo il
moto di rotazione della Terra,... L’esperimento resta, comunque, una pietra
miliare nella storia della Fisica.
Una possibilità di riconciliare l’ osservazione sperimentale con l’ ipotesi
dell’ etere è quella del trascinamento dell’ etere da parte della Terra, ma
questa a sua volta è in contraddizione con le misure di aberrazione. Tra i
vari tentativi di salvare l’ ipotesi dell’ etere si può ricordare quello dovuto
a Fitz Gerald e Lorentz (1892) che postularono una contrazione ad hoc dei
corpi materiali al passaggio attraverso l’ etere, con conseguente dilatazione
dei tempi, secondo leggi che derivano, invece, direttamente dai postulati di
relatività speciale di Einstein.
Si può ancora ricordare che nel 1904 Lorentz dimostrò la curiosa proprietà delle EqM di essere invarianti non per le trasformazioni di Galileo
ma per quelle che sono ora note come trasformazioni di Lorentz; poco dopo,
9.4. LA MASSA APPARENTE DEI FOTONI
145
Poincarè dimostrò che tutte le equazioni della elettrodinamica sono invarianti
per tali trasformazioni (cioè anche la carica e la densità di corrente).
Quasi allo stesso tempo, ma senza basarsi su una discussione della
sola elettrodinamica, Einstein (1905) mostrava che due postulati generali
sono in grado di risolvere tutte le apparenti contraddizioni tra le leggi della
meccanica e dell’ elettromagnetismo, sbarazzando allo stesso tempo il campo
dallo scomodo etere. Il primo di tali postulati è il postulato di relatività: tutti
i sistemi inerziali sono equivalenti per la formulazione di tutte le leggi fisiche.
Tale principio rende superfluo il concetto di etere che, se esistesse, dovrebbe
privilegiare un sistema di riferimento (inerziale o no) rispetto al quale uno
potrebbe mettere in evidenza il moto di tutti gli altri sistemi inerziali contro,
appunto, al principio di relatività. Diventa cosı̀ del tutto irrilevante se l’
etere esista o meno perchè comunque la sua esistenza non sarebbe rilevabile,
il che vuol dire che esso da un punto di vista fisico non esiste.
Il secondo postulato di Einstein è il postulato della costanza della velocità della luce: tutti gli osservatori, anche quando animati di moto relativo
uniforme, trovano sempre lo stesso valore c per la velocità delle luce nel vuoto.
Tale postulato è indispensabile per arrivare alle trasformazioni di Lorentz.
A partire da tali trasformazioni discende poi la necessita’ di promuovere la
velocita’ della luce nel vuoto a velocita’ limite universale di tutte le velocita’
effettive come conseguenza della richiesta di causalita’. Tale condizione costituisce una formulazione alternativa ed equivalente del secondo postulato
di Einstein.
9.4
La massa apparente dei fotoni
Si era visto nel paragrafo 3.3 che si poteva attribuire, per analogia con il caso
meccanico, ad un’onda E.M., o meglio ad un fotone, una massa inerziale:
m=
W
hν
= 2
2
c
c
(9.10)
La circostanza passò praticamente inosservata, assieme a tante altre, finchè
Einstein reinterpretò tutte le relazioni alla luce della teoria della relatività
generale. Senza entrare nel merito di questa teoria, oggetto di corsi avanzati, un fotone che “cade” sulla superficie terrestre da un’altezza h dovrebbe
presentare un incremento di energia (shift violetto) pari a:
∆E = gh
E
c2
(9.11)
146
CAPITOLO 9. OTTICA COERENTE
in cui si è fatta l’ipotesi dell’equivalenza della massa inerziale del fotone
(9.10) con la sua massa gravitazionale. L’incremento percentuale di energia
corrisponde ad un incremento percentuale di frequenza dato da:
∆E
h∆ν
∆ν
gh
=
=
= 2 = 1.09 · 10−16 h
(9.12)
E
hν
ν
c
dove h sia espresso in metri. In un tipico esperimento di laboratorio h può
valere h = 10 m e, dalla (9.12) appare chiaro che è necessario misurare delle
variazioni percentuali di frequenza dell’ordine di 10−15 per poter verificare
l’effetto. Da un punto di vista sperimentale è impossibile pensare di poter
misurare delle variazioni percentuali di frequenza cosı̀ piccole, in tutto il
campo di frequenze delle onde E.M., a meno che non ci sia un fenomeno
fisico specifico che sia sensibile a variazioni cosı̀ piccole.
Nel 1958 venne scoperto un fenomeno che presentava una sensibilità
intrinseca di ∼ 10−12 a variazioni di frequenza, l’effetto Mössbauer, e mediante esso fu possibile verificare sperimentalmente in laboratorio lo shift violetto
dei fotoni in un campo gravitazionale (esperimento di Pound e Rebka, 1960).
Accenniamo brevemente all’effetto Mössbauer, dal nome del suo scopritore, che può anche essere definito come: “assorbimento risonante nucleare di
fotoni senza rinculo”.
Per capire il fenomeno in modo abbastanza intuitivo, cominciamo con
il considerare con un po’ più di attenzione il fenomeno dell’emissione e dell’assorbimento di un fotone di energia hν da parte di un sistema quantistico
elementare (un atomo o un nucleo) a due livelli, quale quello schematizzato
in figura 9.4.
Figura 9.4:
Supponiamo all’inizio che i due livelli energetici siano perfettamente
definiti in energia ed indichiamo con ∆Etr la differenza di energia tra di essi,
9.4. LA MASSA APPARENTE DEI FOTONI
147
∆Etr = E2 − E1 . L’emissione di un fotone dallo stato 2 allo stato 1 viene
abitualmente associata all’equazione:
∆Etr = E2 − E1 = hν
(9.13)
che corrisponde alla semplice conservazione dell’energia. Non si deve però
dimenticare che bisogna anche conservare la quantità di moto totale del sistema, di massa M, e che quindi una parte, molto piccola, di ∆Etr viene
“sprecata” per conservare la quantità di moto e non si ritrova sottoforma di
energia E.M. (fotone). Indicando con Ef l’energia del fotone e con R l’energia
di rinculo del sistema, la formulazione corretta del fenomeno è descritta dal
sistema di equazioni:
∆Etr = Ef + R
pf = pR
(9.14)
dove pf = hν/c = Ef /c.
Si ricava:
p2f
Ef2
p2R
R=
=
=
2M
2M
2Mc2
(9.15)
Poichè R << Ef , dalla (9.10), la (9.15) si può anche riscrivere come:
R≃
(∆Etr )2
2Mc2
(9.16)
La situazione opposta si verifica per l’assorbimento, in quanto Ef deve
non solo compensare ∆Etr , ma fornire anche la quantità di moto necessaria
alla conservazione, dato che il sistema assorbente è inizialmente fermo.
Abbiamo per ora considerato il fenomeno indifferenziato a seconda che
si trattasse di una transizione atomica (∆Etr ∼ 1 eV ) o nucleare (∆Etr ≥
10 keV ). In realtà il fenomeno si osserva molto facilmente nel caso atomico
(si ricordino gli spettri di assorbimento di una luce “bianca”), e non nel caso
nucleare. Perchè? Bisogna anzitutto tenere conto che, se ∆Etr fosse perfettamente definito non osserveremmo mai l’assorbimento risonante. Infatti in
emissione Ef < ∆Etr , anche se di pochissimo, in assorbimento Ef > ∆Etr ,
sempre di pochissimo.
La natura ci aiuta nel caso atomico. Lo stato E2 non è stazionario
(decade!) e quindi sappiamo, dal principio di indeterminazione di Heisenberg,
che, detta Γ l’indeterminazione sull’energia (si ricordi il dipolo smorzato!),
vale la relazione:
Γτ ≥ h̄ = 1.056 · 10−34 Js
(9.17)
148
CAPITOLO 9. OTTICA COERENTE
Assumendo come valore tipico di τ per le transizioni atomiche (ottiche) τ ∼ 10−8 s, dalla (9.17) si ottiene Γ ≃ 6.6 · 10−8eV .
Calcoliamoci ora dalla (9.16) quant’è R, per una transizione ottica
in cui ∆Etr = 1 eV e per un atomo di numero di massa A=100, per cui
supponiamo che 2Mc2 = 2 · 102 · 109 eV (si è supposto per semplicità che la
massa di un nucleone sia Mn = 109 eV). Si ottiene
R=
1
eV = 5 · 10−12 eV
11
2 · 10
(9.18)
cioè R << Γ. Gli spettri del fotone emesso e di quello assorbito non risentono
quindi dell’effetto dell’energia di rinculo.
Nel caso nucleare τ e ∆Etr possono variare di diversi ordini di grandezza (∼ 5 per τ , ∼ 3 per ∆Etr ) e la fenomenologia non è delle più semplici,
comunque oggetto di Corsi specialistici. Qui faremo un esempio numerico che, implicitamente, si riferisce alla transizione nucleare più nota nella
spettroscopia Mössbauer, quella del 57 F e, riportata nel dettaglio in seguito.
Per estrema semplicità assumiamo τ ∼ 10−8 s e ∆Etr = 10 keV, e quindi
R = 5 · 10−4 eV.
Abbiamo ora R >> Γ, quindi gli spettri di emissione e di assorbimento
non si sovrappongono e il fenomeno non avviene. La figura 9.5 rappresenta
graficamente queste osservazioni.
Per fare avvenire il fenomeno dell’assorbimento risonante è necessario
fornire al fotone emesso un’energia maggiore, pari a 2R ≃ 10−3 eV e ciò può
essere fatto spalmando la sorgente radioattiva che emette il fotone su un disco
rotante e osservando l’asorbimento in direzione tangenziale. L’incremento di
energia 2R è dato, ricordando l’effetto Doppler, da 2R = ∆E v/c, quindi
esso si produce per una velocità tangenziale tale che v/c ∼ 10−7 . Oppure si
può ottenere l’incremento di energia sfruttando il fatto che un aumento di
temperatura della sorgente e dell’assorbitore corrisponde ad un incremento
dell’energia cinetica media degli atomi e quindi ad una probabilità maggiore
di osservare il fenomeno. La figura 9.6 schematizza le due differenti possibili
modalità di operazione. Tralasciando tutti i dettagli, si può dire che aumentando T si sarebbe dovuto osservare un aumento dell’effetto di assorbimento
risonante. Ciò venne effettivamente verificato in vari laboratori, senza che
il fenomeno, previsto, suscitasse particolare interesse. Mössbauer, nel 1957,
scoprı̀ che nel caso della transizione γ da 129 keV nel 191 Ir si verificava un
effetto opposto; diminuendo la temperatura (∼ 20 K) l’assorbimento risonante aumentava anzichè diminuire. Questo fenomeno venne denominato
effetto Mössbauer.
La spiegazione intuitiva dell’effetto Mössbauer consiste nell’ipotizzare
che, in una certa percentuale di casi, sia nell’emissione che nell’assorbimento
9.4. LA MASSA APPARENTE DEI FOTONI
149
Figura 9.5:
risonante, il nucleo emettitore e quello assorbitore non si comportino come
nuclei isolati per quanto riguarda la conservazione della quantità di moto,
come sembrerebbe logico, ma è tutta la matrice cristallina a cui appartengono
a contribuire alla conservazione. Quantitativamente, non bisogna utilizzare
Mn c2 a denominatore della (9.16), ma Mn c2 · 10x con x pari ad almeno 15
(cioè un granulo di materiale contenente almeno 1015 atomi). In questo caso
R risulta 1015 volte più piccolo e quindi molto inferiore a Γ. Le linee di
emissione e di assorbimento quindi coincidono e l’assorbimento risonante si
verifica. L’interesse per l’effetto Mössbauer “esplose” sia nel campo della
Fisica fondamentale che di quella applicata con la scoperta, nel 1959, che
anche la transizione γ da 14.4 keV del 57 F e presentava un assorbimento
risonante, a temperatura ambiente, e in modo molto pronunciato. Ciò aprı̀
la strada ad una lunga serie di esperimenti, che continua tuttora, di cui il più
spettacolare è quello relativo allo shift violetto dei fotoni, eseguito da Pound
e Rebka nel 1960.
150
CAPITOLO 9. OTTICA COERENTE
Figura 9.6:
Premettiamo una brevissima introduzione di carattere sperimentale,
descrivendo una semplice misura di trasmissione, schematizzata nella figura 9.7. Supponiamo che i nuclei di 57 F e emettitori (sorgente radioattiva)
e assorbitori siano contenuti nella stessa matrice cristallina ed alla stessa
temperatura. Il rivelatore R misurerà l’intensità del fascio di γ emessi dalla
sorgente e trasmessi (cioè non assorbiti) dall’assorbitore. Supponiamo ora,
invece, che l’assorbitore sia piazzato su un carrellino che si muove con velocità costante v. Se v 6= 0 l’assorbitore vedrà fotoni non più di energia hν,
ma h(ν + ∆ν), con ∆ν = ±v/c a seconda del verso di ~v , e quindi andrà fuori
risonanza lasciando passare un numero maggiore di fotoni (alla risonanza i
fotoni vengono assorbiti di più e poi riemessi in tutte le direzioni). La larghezza della curva sperimentale della trasmissione in funzione di v permette
di risalire immediatamente alla larghezza intrinseca Lorentziana della linea.
Si trovò, per il 57 F e, ∆ν/ν = 1.13 · 10−12 ; bastava una velocità relativa v di
qualche centesimo di mm/s per andare fuori risonanza!
9.4. LA MASSA APPARENTE DEI FOTONI
151
Figura 9.7:
Ecco quindi un fenomeno fisico sensibile a variazioni di frequenza che
si avvicinavano a quelle richieste per la misura dello shift violetto dei fotoni
nel campo gravitazionale. In realtà bisogna ancora guadagnare tre ordini di
grandezza (da 10−12 a 10−15 ) e ciò fu ottenuto con l’artificio sperimentale
di osservare la variazione della curva Lorentziana di risonanza non al centro
del picco (tangente orizzontale, sensibilità minima), ma circa a mezza altezza (tangente al massimo dell’inclinazione, sensibilità massima). Sorgente ed
assorbitore di 57 F e erano posti verticalmente ad una distanza di circa 20 m e
fu verificata sperimentalmente in laboratorio, con un errore del 10%, la previsione della relatività generale circa lo shift violetto dei fotoni che “cadono”
sulla Terra. In seguito l’esperimento fu ripetuto, con lo stesso errore, su una
lunghezza di caduta di soli 2 m.
152
CAPITOLO 9. OTTICA COERENTE
9.5
Coerenza di un’onda E.M.
9.5.1
Coerenza spaziale e temporale
Considerando l’espressione della fase di un’onda E.M. si suole parlare di
coerenza spaziale e coerenza temporale.
• Coerenza spaziale.
Dati due punti P1 e P2 del fronte d’onda al tempo t0 di un’onda E.M.,
si indichino con E1 e E2 i rispettivi campi elettrici. Per definizione di
fronte d’onda, la differenza di fase tra i due campi elettrici al tempo
t0 sarà zero. Se tale differenza di fase rimane zero a qualsiasi istante
t, i due punti si diranno coerenti. Se questo avviene qualunque siano i
due punti sul fronte d’onda, si dirà che l’onda E.M. possiede coerenza
spaziale perfetta. In realtà per un qualsiasi punto P1 il punto P2 deve
essere contenuto entro un’area finita S contenente P1 . In questo caso
si dirà che l’onda possiede coerenza spaziale parziale e per ogni punto
P si può introdurre un’area di coerenza opportunamente definita.
• Coerenza temporale.
In un generico punto P dello spazio si consideri il campo elettrico dell’onda E.M. al tempo t ed al tempo (t + τ ). Se la differenza di fase tra
E(t) ed E(t + τ ) rimane costante per qualunque t e se questo avviene
per 0 ≤ τ ≤ τ0 , si dirà che l’onda E.M. possiede coerenza temporale
parziale con un tempo di coerenza pari a τ0 ; se, invece, la differenza di
fase rimane costante anche per qualunque valore di τ , si dice che l’onda
E.M. possiede coerenza temporale perfetta. Un esempio di onda E.M.
coerente per un tempo τ0 è indicato in figura 9.8: in essa è rappresentato un campo elettrico di tipo sinusoidale con salti di fase ad ogni
intervallo di tempo in media pari a τ0 .
È facile capire che un’onda la cui fase vari uniformemente nel tempo
risulterà avere coerenza temporale perfetta, mentre un’onda la cui fase varia
in modo non uniforme con il tempo, per esempio a causa di salti improvvisi nel
valore della fase iniziale, come indicato nella figura 9.8, o a causa di mutazioni
repentine della frequenza, possiederà coerenza temporale limitatamente agli
intervalli di tempo τ0 nei quali la sua fase ha un andamento uniforme.
È bene notare che i due concetti di coerenza spaziale e temporale sono
distinti e che, ad esempio, un’onda E.M. può possedere una parziale coerenza
temporale pur essendo perfettamente coerente da un punto di vista spaziale.
Se, infatti, la stessa onda di figura 9.8 rappresenta sia il campo elettrico in
9.5. COERENZA DI UN’ONDA E.M.
153
Figura 9.8:
P1 che in P2 del fronte d’onda, l’onda E.M. sarà spazialmente coerente pur
essendo parzialmente coerente da un punto di vista temporale.
9.5.2
Grado di coerenza spaziale e temporale
Per descrivere quantitativamente le proprietà di coerenza spaziale e temporale di un’onda E.M. si introduce una classe di funzioni di correlazione
(o matrici di coerenza). Indichiamo con E il campo elettrico propagativo,
utilizzando la notazione complessa e limitiamoci alle correlazioni del primo
ordine. In un punto ~r1 possiamo definire la funzione di correlazione Γ(1) al
primo ordine come:
Γ(1) (~r1 , ~r1 , τ ) = lim
T →∞
1
2T
Z
T
E(~r1 , t + τ ) E ∗ (~r1 , t) dt
(9.19)
−T
Tale funzione è quindi pari alla funzione di autocorrelazione di E(~r, t),
ovvero pari al valore medio sul tempo del prodotto E(~r1 , t + τ ) E ∗ (~r1 , t). Si
può quindi scrivere più semplicemente
Γ(1) (~r1 , ~r1 , τ ) = hE(~r1 , t + τ ), E(~r1 , t)i
(9.20)
Si può anche definire una funzione normalizzata, γ (1) (~r1 , ~r1 , τ ) come segue:
γ (1) (~r1 , ~r1 , τ ) =
Γ(1) (~r1 , ~r1 , τ )
Γ(1) (~r1 , ~r1 , τ )
=
hE(~r1 , t), E(~r1 , t)i
I(~r1 , t)
(9.21)
dove I(~r1 , t) indica l’intensità del campo elettrico. Dalla disuguaglianza
di Schwartz si può immediatamente vedere che | γ (1) (~r1 , ~r1 , τ ) |≤ 1. Si
può anche dimostrare che γ (1) (~r1 , ~r1 , −τ ) = [γ (1) (~r1 , ~r1 , τ )]∗ . La funzione
γ (1) (~r1 , ~r1 , τ ) è chiamata grado complesso di coerenza temporale nel punto ~r1 .
Il suo modulo | γ (1) (~r1 , ~r1 , τ ) | è invece chiamato grado di coerenza temporale.
154
CAPITOLO 9. OTTICA COERENTE
È infatti evidente che Γ(1) e quindi γ (1) sono un indice di quanta correlazione
ci sia nel campo E nello stesso punto a due istanti successivi separati di τ .
Nel caso di completa assenza di coerenza temporale, dalle (9.19) e (9.21) si ha
infatti γ (1) = 0 per τ > 0 (γ (1) = 1 per τ = 0). Nel caso di perfetta coerenza
temporale (un ’onda sinusoidale, p. es.) si ha | γ (1) |= 1 per qualsiasi τ . La
quantità | γ (1) | è quindi una funzione compresa tra 0 e 1 che descrive il grado
di coerenza temporale dell’onda. In generale la funzione | γ (1) | sarà del tipo
indicato in figura 9.9 (si ricorda che | γ (1) (−τ ) |=| γ (1) (τ ) |). Si può quindi
definire un tempo caratteristico τco , detto tempo di coerenza temporale, ad
es. come quel tempo per cui si ha | γ (1) |= 1/2. Per un’onda perfettamente
coerente si ha ovviamente τco = ∞.
Figura 9.9:
In modo analogo, si può definire una funzione di correlazione al primo
ordine fra due punti ~r1 e ~r2 diversi allo stesso istante:
1
Γ (~r1 , ~r2 , 0) = lim
T →∞ 2T
(1)
Z
T
E(~r1 , t) E ∗ (~r2 , t) dt =
−T
= hE(~r1 , t)E(~r2 , t)i
(9.22)
Si può definire inoltre la corrispondente funzione normalizzata γ (1) (~r1 , ~r2 , 0)
come
γ (1) (~r1 , ~r2 , 0) =
Γ(1) (~r1 , ~r2 , 0)
1/2
[Γ(1) (~r1 , ~r1 , 0) Γ(1) (~r2 , ~r2 , 0)]
(9.23)
Dalla disuguaglianza di Schwartz si può ancora vedere che | γ (1) (~r1 , ~r2 , 0) |≤
1. La quantità γ (1) (~r1 , ~r2 , 0) è detta grado complesso di coerenza spaziale ed il
suo modulo grado di coerenza spaziale. In analogia con quanto detto prima,
fissato ~r1 , è chiaro che | γ (1) (~r1 , ~r2 , 0) | decadrà dal valore 1 (che si ha per
~r2 = ~r1 , cioè per | ~r2 − ~r1 |= 0) a 0 in una certa lunghezza caratteristica che
chiameremo lunghezza di coerenza spaziale (o lunghezza di correlazione dcorr )
155
9.5. COERENZA DI UN’ONDA E.M.
Figura 9.10:
dell’onda luminosa nel punto ~r1 , come indicato qualitativamente in figura
9.10.
I concetti di coerenza spaziale e temporale possono essere combinati
in quello espresso dalla funzione di coerenza mutua Γ(1) (~r1 , ~r2 , τ ) definita da:
Γ(1) (~r1 , ~r2 , τ ) = hE(~r1 , t + τ ), E(~r2 , t)i
(9.24)
che può essere al solito normalizzata come segue:
γ (1) (~r1 , ~r2 , τ ) =
Γ(1) (~r1 , ~r2 , τ )
1/2
[Γ(1) (~r1 , ~r1 , 0) Γ(1) (~r2 , ~r2 , 0)]
(9.25)
La precedente funzione di correlazione definisce il grado di coerenza complesso
tra due punti dell’onda a due tempi successivi.
9.5.3
Misura della coerenza spaziale e temporale
Una maniera molto semplice per la misura del grado di coerenza spaziale fra
due punti x1 e x2 di un’onda luminosa è costituita dall’uso dell’interferometro
di Young, schematizzato in figura 9.11. Esso è semplicemente costituito da
Figura 9.11:
156
CAPITOLO 9. OTTICA COERENTE
uno schermo 1 in cui siano praticati due piccoli fori in corrispondenza dei
punti x1 e x2 ed uno schermo 2 su cui si forma la figura di interferenza
dovuta alla luce che passa attraverso i due fori. Consideriamo per semplicità
il caso in cui l’onda luminosa sia perfettamente coerente da un punto di
vista temporale. In questo caso, si vedranno sullo schermo 2 delle frange di
interferenza che saranno tanto più nitide quanto più i due campi E(x1 , t) e
E(x2 , t) si sono mantenuti in fase durante il tempo di misura delle frange (p.
es. il tempo di esposizione di una lastra fotografica). Pertanto il grado di
visibilità delle frange è una misura del grado di coerenza spaziale fra i punti
x1 e x2 . Precisamente, definiamo visibilità VP delle frange nel punto P la
quantità:
Imax − Imin
VP =
(9.26)
Imax + Imin
dove Imax e Imin sono rispettivamente le intensità nel punto di massimo e di
minimo delle frange intorno al punto P . Se i due fori 1 e 2 lasciano arrivare
nel punto P la stessa intensità di luce e se l’onda è perfettamente coerente
da un punto di vista spaziale, si ha Imin = 0 per cui VP = 1. Nel caso in cui i
segnali nei due punti x1 e x2 siano completamente incorrelati (cioè incoerenti),
le frange scompaiono (cioè Imax = Imin ) per cui VP = 0. Per quanto detto
nel paragrafo precedente, appare dunque chiaro che VP debba essere legato
al modulo della funzione γ (1) (~r1 , ~r2 , τ ). Tale legame è facilmente ottenibile
nel modo seguente. Indichiamo con EP (t′ ) il campo elettrico nel punto P
all’istante t′ . Esso è dovuto alla sovrapposizione dei campi provenienti dai
due fori, per cui potremo scrivere:
EP (t′ ) = K1 E(x1 , t′ − t1 ) + K2 E(x2 , t′ − t2 )
(9.27)
EP = K1 E(x1 , t + τ ) + K2 E(x2 , t)
(9.28)
dove t1 = l1 /c, t2 = l2 /c. I fattori K1 e K2 , chiamati fattori di obliquità,
sono inversamente proporzionali a l1 e l2 e dipendono anche dalle dimensioni
dei due fori e dagli angoli fra l’onda incidente e l’onda diffratta nei punti x1
e x2 ; in generale, essi saranno due fattori costanti complessi. Definendo ora
t = t′ − t2 e τ = t2 − t1 , la (9.27) può scriversi:
L’intensità istantanea nel punto P , ovvero il modulo del vettore di Poynting,
a meno di un fattore moltiplicativo f rac1µ0c, vale dunque:
IP = EP EP∗ = I1 (t+τ ) + I2 (t) + 2Re[K1 K2∗ E(x1 , t+τ )E ∗ (x2 , t)](9.29)
dove I1 e I2 sono le intensità nel punto P dovute, singolarmente, alle emissioni
dei due punti x1 e x2 e sono date da:
I1 = | K1 |2 | E(x1 , t + τ ) |2 = | K1 |2 I(x1 , t + τ )
I2 = | K2 |2 | E(x2 ) |2 = | K2 |2 I(x2 , t)
(9.30)
157
9.5. COERENZA DI UN’ONDA E.M.
dove I(x1 , t + τ ) e I(x2 , t) sono le intensità nei punti x1 e x2 agli istanti di
emissione delle onde che interferiscono in P all’istante t′ . Eseguendo una
media temporale su ambo i membri della (9.29) ed usando la (9.24), si ha:
< IP > = < I1 > + < I2 > +2 | K1 || K2 | Re Γ(1) (~r1 , ~r2 , τ )
(9.31)
Con qualche passaggio, si possono ottenere le espressioni di Imax e Imin :
Imax =< I1 > + < I2 > +2(< I1 >< I2 >)1/2 | γ (1) |
Imin =< I1 > + < I2 > −2(< I1 >< I2 >)1/2 | γ (1) |
(9.32)
e quindi dalla (9.26)
VP =
2(< I1 >< I2 >)1/2
| γ (1) (x1 , x2 , τ ) |
< I1 > + < I2 >
(9.33)
Nel caso < I1 >=< I2 > si ha VP =| γ (1) |. Nel caso τ = 0 (cioè l1 = l2 )
la (9.33) permette dunque una misura di | γ (1) (x1 , x2 , 0) | cioè del grado di
coerenza spaziale dell’onda fra i punti x1 e x2 .
Una maniera molto semplice per la misura della coerenza temporale è
costituita dell’uso dell’interferometro di Michelson (vedi figura 9.2), in cui tra
la sorgente S e l’interferometro sia frapposto uno schermo con un piccolo foro
in corrispondenza del punto P in cui si vuole misurare la coerenza temporale
dell’onda. Nella direzione C, come noto, a causa dell’interferenza dei due
fasci si avrà luce o buio secondo che 2(d1 − d2 ) sia uguale ad un numero
pari o dispari di semilunghezze d’onda. Per un’onda parzialmente coerente
l’intensità IC nel punto C in funzione di 2(d1 − d2 ) andrà come indicato in
figura 9.12. Anche in questo caso si può definire una visibilità delle frange
VP (τ ) come nella (9.26), essendo ora τ = 2(d1 − d2 )/c. In maniera analoga a
Figura 9.12:
quanto fatto per l’interferometro di Young, si può ora dimostrare che:
VP = | γ (1) (P, P, τ ) |
(9.34)
158
CAPITOLO 9. OTTICA COERENTE
La misura della visibilità delle frange permette quindi, in questo caso, la
misura del grado di coerenza temporale dell’onda nel punto P . Si può anche
definire una lunghezza di coerenza temporale lτ come lτ = cτco , dove τco è il
tempo di coerenza temporale. La quantità lτ /2 fornisce la differenza (d1 −d2 )
fra i due bracci dell’interferometro per cui risulta VP = 1/2.
Il concetto di coerenza temporale di un’onda E.M., come si è visto, è
legato alla variazione nel tempo della fase dell’onda ed è intimamente connesso alla sua monocromaticità. Si può dimostrare che esiste un legame
preciso tra la indeterminazione in frequenza dell’onda, ∆ν e il suo tempo di
coerenza τco : ∆ν · τco ≥ 1/4π, da cui si deduce che quanto più un’onda è
monocromatica, tanto più essa è temporalmente coerente.
Per definire il grado di coerenza di un’onda sono state valutate le correlazioni tra i valori del campo elettrico dell’onda in due punti dello spazio
in cui essa si propaga e a due istanti differenti. Considerando, invece, correlazioni esistenti tra i valori del campo elettrico in tre o più punti differenti
ed a tre o più istanti differenti (ossia in tre o più punti dello spazio–tempo) è
possibile definire la coerenza al secondo ordine o superiore dell’onda in esame.
Nelle sorgenti luminose termiche (Sole, lampade ad incandescenza,
lampade al mercurio, ...) si ha la somma dei contributi dei singoli emettitori
scorrelati che le compongono (atomi); tali sorgenti possono dare coerenza
solamente al primo ordine.
Il laser, invece, può generare radiazione ottica coerente in più ordini, al
limite in tutti, grazie al fatto che il meccanismo che sta alla base del processo
di emissione è il processo di emissione stimolata, nel quale un atomo, in
presenza di un’onda E.M. di frequenza opportuna, incidente su di esso, viene
stimolato ad emettere un’altra onda E.M.con gli stessi valori di frequenza e
di fase dell’onda incidente.
9.6
Olografia
9.6.1
Generalità
Vediamo ora una delle applicazioni più spettacolari dell’Ottica coerente:
l’olografia o fotografia tridimensionale. Il principio base dell’olografia è illustrato in figura 9.13. Un fascio di luce coerente (un fascio di luce laser, p.
es.) viene fatto incidere su uno specchio semiriflettente e diviso cosı̀ in un
fascio A riflesso ed un fascio B trasmesso. Il fascio A incide direttamente su
una lastra fotografica mentre il fascio B illumina l’oggetto che si vuole “fotografare”. Una parte della luce diffusa dall’oggetto cadrà sulla lastra, come
indicato in figura 9.13 a). Pertanto sulla lastra, durante la fase di esposizio-
159
9.6. OLOGRAFIA
Figura 9.13:
ne, si verrà a formare una figura di interferenza dovuta alla sovrapposizione
di questi due fasci incidenti: il fascio diretto o fascio di riferimento A e il
fascio diffuso da ogni punto dell’oggetto. Se la pellicola viene sviluppata e la
si esamina con un ingrandimento sufficiente, si potranno vedere le figure di
inteferenza che sono estremamente complicate e non hanno alcuna relazione
ovvia con l’oggetto “fotografato” ma contengono una registrazione completa
delle proprietà geometriche dell’oggetto.
La lastra sviluppata venga di nuovo messa nella posizione in cui si
trovava durante l’esposizione e si rimuova l’oggetto, come indicato in figura
9.13 b). Il fascio di riferimento A, durante questa fase di ricostruzione dell’immagine, interagisce con la figura di interferenza sulla lastra e riproduce
dietro di essa un fascio diffratto che risulta essere esattamente la stessa onda
′
E.M. P diffusa dall’oggetto in figura 9.13 a). Un osservatore che guardi la
lastra fotografica da dietro, come indicato in figura 9.13 b), vedrà l’oggetto
dietro la lastra come se esso fosse realmente lı́.
Il principio dell’olografia è stato stabilito ben prima dell’avvento dei
160
CAPITOLO 9. OTTICA COERENTE
laser; la tecnica, infatti, è stata proposta da Gabor nel 1948, ma è solo dopo
l’invenzione del laser che essa è diventata utilizzabile in pratica ed ha dimostrato il suo grande potenziale. Una delle caratteristiche più interessanti
dell’olografia è che l’oggetto ricostruito possiede proprietà tridimensionali.
Cosı̀, se l’osservatore cambia il suo punto di osservazione può vedere gli altri lati dell’oggetto. Questo avviene perchè la lastra fotografica contiene,
sotto forma di figura di interferenza, informazioni su tutte le caratteristiche
geometriche dell’oggetto, e pertanto anche la sua tridimensionalità.
9.6.2
Principio fisico dell’olografia
Consideriamo ora più in dettaglio il principio fisico dell’olografia. Per semplicità consideriamo il caso di un oggetto puntiforme P , ad esempio il punto
P in figura 9.13 a), e facciamo riferimento ad una disposizione geometrica
dei due fasci, di riferimento e diffuso, particolarmente semplice, quale quella
schematizzata in figura 9.14. In questo caso il fascio di riferimento è parallelo
Figura 9.14:
alla direzione media del fascio diffuso e si parla di olografia in asse. Consideriamo come onda di riferimento un’onda piana, mentre l’onda diffusa dal
punto P sarà un’onda sferica e scegliamo come origine del sistema di riferimento il punto P . I campi elettrici delle due onde in un punto O della lastra
fotografica sono dati da:
E1 (z0 , t) = A1 ei(kz0 −ωt)
(9.35)
161
9.6. OLOGRAFIA
E2 (r0 , t) =
A2 i(kr0 −ωt)
e
r0
(9.36)
dove A1 e A2 sono delle costanti complesse, z0 è la distanza dal punto P al
piano della lastra e r0 è la distanza del punto O dall’origine. L’intensità in
O vale pertanto, a meno di una costante ǫ0 c:
I = | E1 + E2 |2 = | E1 |2 + | E2 |2 + E1∗ E2 + E1 E2∗ =
′
′′
′′′
= I +I +I
(9.37)
con
′
I = | E1 |2 + | E2 |2 = | A1 |2 +
I
′′
I
′′′
| A2 |2
r02
(9.38)
= E1∗ E2 =
A∗1 A2 ik(r0 −z0 )
e
r0
(9.39)
= E1 E2∗ =
A1 A∗2 ik(z0 −r0 )
e
r0
(9.40)
′
L’intensità totale I è pertanto la somma di una quantità, I , che è una
′′
′′′
funzione della posizione del punto O, e delle quantità I e I , la cui somma
può essere scritta come:
I
′′
+ I
′′′
∝
cos[k(r0 − z0 ) + φ]
r0
(9.41)
dove φ è una costante. A causa del termine coseno nella (9.41), l’intensità
totale I in funzione di r0 mostra una serie di massimi e minimi. Cosı̀ l’interferenza tra l’onda piana E1 (z, t) e l’onda sferica E2 (r, t) produce una serie di
frange circolari sulla lastra, come mostrato in figura 9.14 b). La distanza ∆r0
tra le frange soddisfa la condizione k∆r0 = 2π. Cosı̀, se nel punto O si ha un
′
′
massimo, il massimo successivo sarà in un punto O tale che P O − P O = λ.
Quando la lastra viene sviluppata, essa mostrerà una serie di frange
chiare e scure. Se supponiamo, come approssimazione alquanto soddisfacente
della realtà, che la risposta della pellicola sia proporzionale all’intensità I,
allora l’annerimento sarà proporzionale a I e si potrà scrivere:
1 − T = αI
(9.42)
dove T è il coefficiente di trasmissione di potenza della lastra e α è una costante che rappresenta il grado di annerimento. Il coefficiente di trasmissione
162
CAPITOLO 9. OTTICA COERENTE
Figura 9.15:
′
del campo elettrico della lastra, perciò, è T =
per un piccolo grado di annerimento, si ha:
T
′
√
T e dall’equazione (9.42)
1
= (1 − αI)1/2 ≃ 1 − αI
2
(9.43)
Supponiamo ora di illuminare la lastra con il fascio di riferimento E1 (z, t),
come indicato in figura 9.15. Il campo elettrico subito dietro la lastra sarà:
′
E(z0 , r0 , t) = T E1 ≃
1
1 − αI E1 =
2
1
′
′′
′′′
′
′′
′′′
1 − α(I + I + I ) E1 = E + E + E
2
=
(9.44)
dove, dalle (9.35), (9.38)–(9.40) e (9.43) si ha:
′
E =
E
′′
E
′′′
| A1 |2
| A2 |2
1−α
−α
2
2r02
= −α
!
E1 (z0 , t)
(9.45)
| A1 |2 A2 i(kr0 −ωt)
e
2r0
(9.46)
A21 A∗2 i(2kz0 −kr0 −ωt)
e
2r0
(9.47)
= −α
Il comportamento dell’onda diffratta dietro la lastra può, in linea di principio,
′
′′
′′′
essere calcolato usando il metodo di Fresnel per un campo E = E +E +E .
163
9.6. OLOGRAFIA
′
Tuttavia, si può vedere immediatamente che il primo termine E dà origine
ad un’onda diffratta
| A1 |2
| A2 |2
1−α
−α
2
2r02
!
E1 (z, t)
(9.48)
′
Infatti, quest’onda produce un campo uguale a E sulla lastra, cioè per z = z0 .
′
Il termine E , pertanto, produce dietro la lastra un’onda piana uguale a quella incidente, eccetto per un fattore di attenuazione che corrisponde all’annerimento medio sulla lastra. Analogamente, è facile vedere che i termini
′′
′′′
E e E producono due onde sferiche, una divergente dal punto P e l’altra
′
′′′
convergente verso il punto P in figura 9.15. Considerando il termine E ,
per esempio, è sufficiente osservare che un’onda sferica che converge verso il
′
punto P produce sulla lastra un campo
′
EP ′
ei(−kr0 −ωt)
∝
r0′
′
(9.49)
dove r0′ = P O. Ora, dato che r0′ = r0 un confronto tra la (9.47) e la
(9.49) mostra che i due campi sono uguali eccetto che per un fattore di fase
costante (ei2kz0 ) che non è significativo. Poichè la soluzione è unica, segue
′′′
′
che il termine E da origine ad un’onda sferica diffratta che converge in P .
′
Trascurando il termine ovvio dovuto a E (che rappresenta la trasmissione parziale dell’onda che incide sulla lastra sviluppata), si vede infine che
′
l’ologramma produce un’immagine virtuale P ed un’immagine reale P del
punto P di figura 9.14 a).
Le considerazioni fatte fino ad ora si ripetono nel caso di un corpo
non puntiforme; per analogia con il caso di un corpo puntiforme, si può
vedere che l’ologramma di un oggetto esteso, illuminato dall’onda di riferi′
mento, produce dietro alla lastra tre contributi: un campo E , che è l’onda
′′
di riferimento E1 opportunamente attenuata, un campo E , che produce
′′′
un’immagine virtuale dell’oggetto, ed un campo E , che produce un’immagine reale dell’oggetto (che può cioè essere proiettata su uno schermo) in una
posizione che è speculare all’immagine virtuale rispetto alla lastra. Si può
ora vedere come l’olografia permetta di registrare completamente il campo
′′
diffuso dall’oggetto. Dalla (9.46) si vede che E ∝ E2 e pertanto vengono
registrate sia l’ampiezza che la fase del campo E2 . Se non ci fosse l’interferenza con il campo di riferimento, l’intensità del campo sulla lastra, e perciò
anche l’annerimento, sarebbe proporzionale a | E2 |2 , cioè solo il modulo di
E2 verrebbe registrato. Il principio dell’olografia permette, invece, di registrare anche l’informazione della fase del campo diffuso dall’oggetto e questo
rende possibile una ricostruzione completa dell’oggetto.
164
9.6.3
CAPITOLO 9. OTTICA COERENTE
Olografia in asse e fuori asse
Il semplice dispositivo olografico in asse sopra descritto è analogo a quello
proposto da Gabor nel 1948. In esso l’oggetto che viene “fotografato” è un
corpo trasparente (Gabor usò una diapositiva con nomi di scienziati) e produce esso stesso l’onda di riferimento; in questo modo le differenze di cammino
ottico tra i due fasci sono minime e questo consente l’uso di una sorgente
con lunghezza di coerenza relativamente corta, spiegando lo sviluppo della
tecnica anche in assenza di sorgenti laser che si sarebbero diffuse solo una
ventina di anni più tardi. Le limitazioni di questo tipo di olografia sono dovute essenzialmente al ristretto numero di oggetti di cui è possibile realizzare
una registrazione olografica. Inoltre, i tre termini prodotti dall’ologramma
durante la restituzione sono spazialmente sovrapposti e l’immagine ottenuta
è di scarsa qualità.
Questi inconvenienti vengono superati nella tecnica della olografia fuori asse, che è ora considerata la configurazione olografica fondamentale e
viene schematizzata nella figura 9.16. In essa le direzioni di propagazione
Figura 9.16:
media dei fasci diffuso e di riferimento non sono più coincidenti: per questo
si parla di olografia fuori asse. Questo comporta, nella restituzione, la separazione spaziale dei termini prodotti per diffrazione dall’ologramma e quindi
una perfetta ricostruzione del fronte d’onda diffuso dall’oggetto, ora non più
degradato dalla sovrapposizione con le altre componenti. Per questo tipo
di configurazione non esistono limitazioni sul tipo di oggetti fotografabili; in
generale, però, le differenze di cammino ottico tra il fascio oggetto e quello di
165
9.6. OLOGRAFIA
riferimento possono essere notevoli, soprattutto nel caso di oggetti di dimensioni notevoli. È allora indispensabile l’uso di sorgenti di grande lunghezza
di coerenza, quali sono i laser.
9.6.4
Olografia in riflessione
All’inizio degli anni ’60 nell’URRS fu sviluppata la configurazione detta olografia in riflessione. In questo caso, i fronti d’onda ricostruiti sono ottenuti
per riflessione dall’ologramma invece che per trasmissione come nelle tecniche descritte in precedenza. Questa olografia utilizza le proprietà di volume
dell’emulsione fotografica e, infatti, in questo caso si parla di ologrammi di
volume. La tecnica è schematizzata in figura 9.17. Per registrare un olo-
Figura 9.17:
gramma in riflessione i fasci oggetto e di riferimento incidono sulla lastra da
parti opposte. L’interferenza produce, dopo il trattamento della lastra, strati di argento metallico all’interno del volume dell’emulsione che, in fase di
ricostruzione, agiscono come superfici semiriflettenti. Nel caso particolare di
interferenza tra due onde piane, di lunghezza d’onda λ, propagantisi in direzione perpendicolare alla lastra e in versi opposti, queste superfici sono piani
paralleli all’emulsione e separati tra loro di λ/2. Gli ologrammi in riflessione
sono visibili anche in luce bianca perchè funzionano essi stessi da filtri monocromatori: fissata la geometria di osservazione, ossia l’ angolo di incidenza
166
CAPITOLO 9. OTTICA COERENTE
del fascio di luce, esiste infatti una sola lunghezza d’onda di risonanza (λris )
che soddisfa la condizione di Bragg, come indicato in figura 9.18.
Figura 9.18:
9.6.5
Applicazioni dell’olografia
Dopo aver spiegato il principio su cui si basa la tecnica dell’olografia, consideriamo ora brevemente alcuni suoi campi di applicazione.
Memorie olografiche. Una porzione, anche piccola, di ologramma contiene pur anche se degradata in qualità, l’informazione dell’intero oggetto. Ripartendo la lastra in un numero di piccoli elementi è possibile immagazzinare
olograficamente una quantità grandissima di immagini, ciascuna restituibile
interrogando selettivamente ogni elemento con il fascio di riferimento.
Interferometria olografica Si tratta di una tecnica di prova non invasiva, che consente il confronto tra stati diversi di uno stesso oggetto e trova
applicazioni per l’industria, la medicina, il restauro, i collaudi ottici , ecc. A
tal fine, viene dapprima registrato l’ologramma dell’oggetto nella sua condizione iniziale; esposta e sviluppata la lastra, la si riposiziona accuratamente
nella sua sede; illuminando quindi l’ologramma con l’onda di riferimento si
ricostruisce l’immagine dell’oggetto non perturbato. Illuminando nel contempo anche l’oggetto vero, visto dall’osservatore attraverso la lastra, si ha
interferenza tra luce diffusa dall’oggetto vero e quella dell’immagine olografica virtuale; perturbando l’oggetto con un agente esterno (meccanico, termico
o di altra natura) si visualizza il campo di deformazione superficiale indotto sotto forma di frange di interferenza, continuamente mutanti in funzione
9.6. OLOGRAFIA
167
delle caratteristiche della perturbazione (interferometria olografica in tempo
reale). Come tecnica alternativa, si registrano sulla stessa lastra due ologrammi, uno dell’oggetto nel suo stato iniziale e uno dell’oggetto perturbato.
La ricostruzione fornisce due immagini olografiche virtuali, che, per interferenza producono lo stesso tipo di informazione congelata all’istante della
seconda esposizione (interferometria olografica in doppia esposizione). La
tecnica si estende anche, con opportune varianti, allo studio di vibrazioni di
corpi sollecitati.
Da ricordare anche altre applicazioni, quali l’elaborazione ottica dell’informazione, la realizzazione di componenti ottici per via olografica, codici
di protezione, creazioni artistiche figurative, documentazione.
Appendice A
Operatori Scalari e Vettoriali
Si consideri un sistema di riferimento cartesiano individuato da una terna di
assi coordinati (x, y, z) con versori ~i, ~j e ~k; per definizione di versori valgono
le relazioni:
~i · ~j = ~i · ~k = ~j · ~k = 0
~i · ~i = ~j · ~j = ~k · ~k = 1
(A.1)
In tale sistema di riferimento si definisce prodotto scalare (o interno) di due
vettori ~u e ~v , di componenti (ux , uy , uz ) e (vx , vy , vz ), la quantità:
~u · ~v = ux vx + uy vy + uz vz
(A.2)
e prodotto vettoriale (o esterno) dei due vettori la quantità:
~u × ~v = ~i(uy vz − uz vy ) + ~j(uz vx − ux vz ) + ~k(ux vy − uy vx )
(A.3)
che è anche lo sviluppo del determinante:
~u × ~v
≡
~i
ux
vx
~j
uy
vy
~k
uz
vz
Si definisce prodotto misto dei vettori ~u, ~v e ~t la quantità:
~u · ~v × ~t = ~v · ~t × ~u = ~t · ~u × ~v
(A.4)
che gode della proprietà ciclica, e doppio prodotto esterno:
~u × (~v × ~t) = (~u · ~t) ~v − (~u · ~v) ~t
(A.5)
Inoltre:
(~u × ~v ) · (~t × ~z)
= ~u · ~v × (~t × ~z )
= ~u [ (~v · ~z ) ~t − (~v · ~t) ~z ]
= (~u · ~t)(~v · ~z ) − (~u · ~z )(~v · ~t)
(A.6)
e
(~u × ~v ) × (~t × ~z) = (~u × ~v · ~z) ~t − (~u × ~v · ~t) ~z
(A.7)
Se indichiamo con f , un generico campo scalare, possiamo definire
l’operatore vettoriale nabla ∇, come:
∂
∂
∂
+ ~j
+ ~k
∇ ≡ ~i
∂x
∂y
∂z
(A.8)
ed in funzione di questo l’operatore vettoriale gradiente:
∂f
∂f
∂f
∇ f ≡ ~i
+ ~j
+ ~k
∂x
∂y
∂z
(A.9)
Consideriamo, ora, un campo scalare U(x, y, z); se partendo da un punto
P = (x, y, z) si esegue uno spostamento infinitesimo:
d~s = ~i dx + ~j dy + ~k dz = ~n ds
(A.10)
con (ds)2 = (dx)2 + (dy)2 + (dz)2 , la variazione corrispondente di U è:
dU
=
U(x + dx, y + dy, z + dz) − U(x, y, z)
∂U
∂U
∂U
=
dx +
dy +
dz
∂x
∂y
∂z
= ∇U · d~s = ∇U · ~nds
(A.11)
In un punto P = (x, y, z) la derivata direzionale di U nella direzione
specificata dal versore ~n è definita come:
dU
≡ ∇U · ~n
ds
(A.12)
cioè è la componente del vettore ∇U nella direzione orientata fissata dallo
spostamento d~s. Da questa ultima relazione si ricava che:
1. il gradiente di U è un vettore di modulo uguale al valore assoluto
massimo della derivata direzionale;
2. la direzione e il verso coincidono con quelli per i quali la derivata
direzionale è massima;
3. in ogni punto il vettore gradiente è perpendicolare alla superficie di
valore U = cost passante per il punto considerato.
Due grandezze frequentemente usate in relazione ad un generico campo vettoriale ~v sono l’operatore scalare divergenza:
∇ · ~v ≡
∂vy
∂vz
∂vx
+
+
∂x
∂y
∂z
(A.13)
(che si ottiene applicando formalmente la definizione dell’operatore ∇ scalarmente al vettore ~v ) e l’operatore vettoriale rotore tale che:
∇ × ~v
≡
!
∂vy ~
∂vz
−
i +
∂y
∂z
!
∂vy
∂vx
~k
−
∂x
∂y
∂vz
∂vx
−
∂z
∂x
!
~j
(A.14)
che, di nuovo, si ottiene applicando formalmente l’operatore ∇ vettorialmente
al vettore ~v e che si può ottenere anche come lo sviluppo del determinante:
∇ × ~v
≡
~i
~j
~k
∂
∂x
∂
∂y
∂
∂z
vx
vy
vz
Per la linearità dell’operatore ∇ si ha:
∇ (f + g) = ∇ f + ∇ g
(A.15)
∇ (f g) = f ∇ g + g∇ f
(A.16)
∇ · (~u + ~v) ≡ ∇ · ~u + ∇ · ~v
(A.17)
∇ × (~u + ~v ) = ∇ × ~u + ∇ × ~v
(A.18)
∇ · (f ~u) = ~u · ∇f + f ∇ · ~u
(A.19)
∇ × (f ~u) = ∇f × ~u + f ∇ × ~u
(A.20)
Si definisce anche l’operatore di Laplace o laplaciano ∇2 come:
∇ · ∇f ≡ ∇2 f
(A.21)
ovvero
∇2 ≡
∂2
∂2
∂2
+
+
∂x2
∂y 2
∂z 2
(A.22)
Il laplaciano può essere applicato sia ad un campo scalare:
∇2 f = ∇ · ∇f =
∂2f
∂2f
∂2f
+
+
∂x2
∂y 2
∂z 2
(A.23)
sia ad un campo vettoriale:
∇2~u = ∇∇ · ~u − ∇ × ∇ × ~u = ∇2 ux ~i + ∇2 uy ~j + ∇2 uz ~k(A.24)
Le formule (A.9), (A.13)–(A.21) seguono per diretta applicazione dell’operatore ∇ a campi scalari e vettoriali; un po’ più elaborata è, invece, la
dimostrazione delle seguenti utili proprietà:
∇(~u · ~v ) = (~u · ∇)~v + (~v · ∇)~u + ~u × (∇ × ~v ) + ~v × (∇ × ~u)(A.25)
∇ · (~u × ~v ) = ~v · (∇ × ~u) − ~u · (∇ × ~v )
(A.26)
∇ × (~u × ~v ) = ~u(∇ · ~v ) − ~v(∇ · ~u) + (~v · ∇)~u − (~u · ∇)~v
(A.27)
∇ × ∇ × ~u = ∇∇ · ~u − ∇2~u
(A.28)
Si dimostra anche facilmente che:
∇ × ∇f = 0
(A.29)
che si esprime dicendo che il vettore ∇f è sempre irrotazionale, qualunque
sia lo scalare f . Infine:
∇ · ∇ × ~u = 0
(A.30)
che si esprime dicendo che ∇ × ~u è sempre solenoidale, qualunque sia il
vettore ~u. Se un vettore, oltre che irrotazionale, cioè tale che ~v = ∇f , è
anche solenoidale, cioè tale che ∇ · ~u, allora si ha anche:
∇2 f ≡
∂2f
∂2f
∂2f
+
+
∂x2
∂y 2
∂z 2
!
f = 0
(A.31)
Appendice B
Teoremi notevoli del Calcolo
Differenziale
Sia f (x, y, z) uno scalare qualsiasi; consideriamone una superficie di livello,
cioè una superficie tale che su di essa sia f (x, y, z) = cost. Per definizione di
superficie di livello, su di essa df = 0, ovvero, se d~s è l’elemento infinitesimo
di arco su tale superficie
d~s = dx ~i + dy ~j + dz ~k
(B.1)
si avrà:
0 ≡ df = d~s · ∇f
(B.2)
come già visto dalla definizione di gradiente (A.9) e di derivata direzionale
(A.12).
Si definisce la circuitazione di un vettore ~v come l’integrale di ~v · d~s
valutato lungo una qualche linea s:
I =
Z
~v · d~s
s
(B.3)
Se ~v è tale che
~v = ∇f
(B.4)
abbiamo
df = ∇f · d~s
(B.5)
Quindi, se P1 e P2 sono gli estremi della curva s, la circuitazione I definita
in (B.3) diventa semplicemente
I =
Z
P2
P1
df = f (P2 ) − f (P1 )
(B.6)
cioè dipende solo dagli estremi della curva e non dal cammino seguito pare
passare da P1 a P2 . Pertanto, tutte le volte che
~v = ∇f
(B.7)
si ha che la sua circuitazione lungo una linea chiusa è nulla:
I
∇f · d~s = 0
(B.8)
in tal caso si dice che il vettore è conservativo.
Si definisce flusso di un vettore ~v attraverso una superficie S, l’integrale di superficie
φS (~v ) =
Z
S
~v · ~n dS
(B.9)
ove ~n è il versore avente in ogni punto (si S) la direzione normale alla superficie S in quel punto e rivolto sempre dalla stessa parte di S. Se ora S è
una superficie chiusa e orientabile, con normale esterna ~n, che costituisce la
frontiera di un solido (nello spazio a tre dimensioni) di volume V , e ~v è un
campo vettoriale differenziabile con continuità definito in V , si ha il teorema
di Gauss o della divergenza (cfr. Apostol, volume 3, p.430 oppure dispensa
Prof. Zampieri, pag. 55)
φS (~v ) =
Z
S
~v · ~n dS =
Z
V
(∇ · ~v ) dV
(B.10)
che permette di sostituire un integrale di volume ad un integrale di superficie
(o viceversa) e fornisce il significato fisico dell’operatore divergenza definito
dalla (A.13). Dal teorema della divergenza seguono le relazioni:
Z
S
f~n dS =
Z
V
∇f dV
(B.11)
Z
(B.12)
e
Z
S
~n × ~v dS =
V
∇ × ~v dV
per la cui dimostrazione è sufficiente moltiplicare scalarmente i due membri
delle equazioni con un vettore costante ~a e poi applicare le (A.19) e (A.26),
rispettivamente, ricordando la definizione di prodotto misto nel caso della
(B.12), ed il teorema della divergenza (B.10).
Di grande utilità è anche il teorema o lemma di Green che, di nuovo,
permette di trasformare un integrale di volume in uno di superficie o un
integrale di superficie in uno di linea. Considerando una superficie S ed un
volume V del tipo descritto nel teorema della divergenza, se f e g sono due
campi scalari differenziabili con continuità e definiti in V , allora:
Z
V
(g∇2f − f ∇2 g) dV
=
=
R
V
∇ · (g∇f − f ∇g) dV
R
S (g∇f
− f ∇g) · ~n dS
(B.13)
in cui ~n è la normale esterna a S; parimenti, considerando una superficie
regolare nel piano, S, ed il suo contorno s, se f e g sono due campi scalari
differenziabili con continuità e definiti in S, allora:
Z
S
(g∇2 f − f ∇2 g) dS
=
=
R
S
∇ · (g∇f − f ∇g) dS
H
s (g∇f
− f ∇g) · ~n ds
(B.14)
in cui ~n è il versore normale a s. Si può facilmente osservare (cfr. anche
Apostol, volume 3, pag. 437, esercizio 7) che questo lemma è conseguenza
del teorema della divergenza (B.10) e della relazione
∇ · (f ∇g) = ∇f · ∇g + f ∇2 g
(B.15)
che segue dalla (A.19) nel caso in cui ~u = ∇g.
Tornando alla definizione di circuitazione (B.3), un altro teorema importante, il teorema di Stokes o della circuitazione (cfr. Apostol, volume 3,
pag. 408 oppure dispensa Prof. Zampieri pag. 47), asserisce che se S è una
superficie parametrica semplice e regolare, ~v è un campo vettoriale differenziabile definito su S e s è la frontiera orientata (percorsa in senso antiorario)
di S, allora:
I
s
~v · d~s =
Z
S
(∇ × ~v ) · ~n dS
(B.16)
che permette di sostituire un integrale di superficie ad un integrale di linea (o
viceversa), fornendo al contempo l’interpretazione fisica dell’operatore rotore
introdotto dalla (A.14), e che dice che la circuitazione di un vettore ~v lungo
una linea chiusa s è uguale al flusso del vettore ∇×~v attraverso una qualsiasi
superficie S avente per contorno la linea s. In particolare ciò mostra che il
flusso del vettore ∇ × ~v dipende solo dal contorno e non dalla particolare
forma della superficie S.
Si noti ancora, alla luce delle (B.8) e (B.16), come un vettore conservativo (B.7) sia anche irrotazionale (A.29)
∇ × ∇f = 0
(B.17)
Inoltre le due espressioni
~v = ∇f
o ∇ × ~v = 0
(B.18)
hanno lo stesso significato e una segue dall’altra.
Dal teorema della circuitazione seguono le relazioni:
I
s
f d~s =
Z
S
~n · ∇f dS
(B.19)
Z
(B.20)
e
I
s
d~s × ~v =
S
dS(~n × ∇) × ~v
per la cui dimostrazione è sufficiente moltiplicare scalarmente i due membri
delle equazioni con un vettore costante ~a, ricordando la definizione di prodotto misto, e poi applicare la (A.20), nel caso della (B.18), ed il teorema
della circuitazione (B.16).
Appendice C
Espressione di operatori
differenziali in diverse
coordinate
Ricordiamo le espressioni degli operatori differenziali in un sistema di coordinate cartesiane (x, y, z).
∂
∂
∂
+ ~j
+ ~k
∇f = ~i
∂x
∂y
∂z
∇ · ~u =
(C.1)
∂ux
∂uy
∂uz
+
+
∂x
∂y
∂z
∂uy
∂uz
−
∇×~u = ~i
∂y
∂z
∇2 f = ∇ · ∇f =
!
∂ux
∂uz
+ ~j
−
∂z
∂x
∂2f
∂2f
∂2f
+
+
∂x2
∂y 2
∂z 2
∇2~u = ∇2 ux ~i + ∇2 uy ~j + ∇2 uz ~k
(C.2)
!
!
∂uy
∂ux
+ ~k
(C.3)
−
∂x
∂y
(C.4)
(C.5)
Capita assai comunemente che la simmetria di un particolare problema
suggerisca l’uso di un sistema di coordinate curvilinee diverso da quello cartesiano. Per questo motivo riportiamo di seguito le espressioni degli operatori
differenziali suindicati in coordinate polari sferiche e cilindriche.
In coordinate polari sferiche (r, θ, ϕ), con versori ~ir , ~iθ e ~iϕ :
1 ∂f
1 ∂f
∂f
+ ~iθ
+ ~iϕ
∇f = ~ir
∂r
r ∂θ
r sin θ ∂ϕ
(C.6)
r = (x2 + y 2 + z 2 )1/2
→ θ = arccos √ 2 z 2
2
x = r sin θ cos ϕ
y = r sin θ sin ϕ
(x
z = r cos θ
+ z )
1 ∂ 2
1 ∂
1 ∂uϕ
(r ur ) +
(sin θuθ ) +
2
r ∂r
r sin θ ∂θ
r sin θ ∂ϕ
∇ · ~u =
∇ × ~u
∇2 f
+ y
ϕ = arctg y/x
"
1 ∂
r 2 ∂r
=
#
∂
∂uθ
~ir 1
+
(sin θ uϕ ) −
r sin θ ∂θ
∂ϕ
"
#
1
1
∂
∂u
r
~iθ
−
(r uϕ ) +
r sin θ ∂ϕ
∂r
"
#
∂
∂u
1
r
~iϕ
(r uθ ) −
r ∂r
∂θ
=
=
(C.7)
r 2 ∂f
∂r
1 ∂2
(rf )
r ∂r 2
h
∇2~u = ~ir ∇2 ur −
h
+
+
~iϕ ∇2 uϕ −
1
∂
sin θ ∂θ
1
∂
r 2 sin θ ∂θ
2
u
r2 r
~iθ ∇2 uθ −
h
r2
−
r2
sin θ ∂f
∂θ
sin θ ∂f
∂θ
2
sin2 θ
uθ
r 2 sin2 θ
uϕ
r 2 sin2 θ
+
+
+
+
∂
(sin θ
∂θ
2 ∂ur
r 2 ∂θ
r2
−
∂ur
2
sin θ ∂ϕ
(C.8)
∂2f
1
r 2 sin2 θ ∂ϕ2
∂2f
1
r 2 sin2 θ ∂ϕ2
uθ ) +
∂uϕ
∂ϕ
2 cos θ ∂uϕ
r 2 sin2 θ ∂ϕ
+
(C.9)
i
i
+
+
2 cos θ ∂uθ
r 2 sin2 θ ∂ϕ
i
(C.10)
In coordinate cilindriche (r, ϕ, z), con versori ~ir , ~iϕ e ~iz :
x = r cos ϕ
y = r sin ϕ
z = z
r = (x2 + y 2)1/2
→ ϕ = arctg y/x
z = z
∂f
1 ∂f
∂f
∇f = ~ir
+ ~iϕ
+ ~iz
∂r
r ∂ϕ
∂z
∇ · ~u =
1 ∂uϕ
∂uz
1 ∂
(r ur ) +
+
r ∂r
r ∂ϕ
∂z
(C.11)
(C.12)
!
1 ∂uz
∂uϕ
∇ × ~u = ~ir
+
−
r ∂ϕ
∂z
!
∂u
∂u
z
r
~iϕ
+
−
∂z
∂r
!
~iz 1 ∂ (r uϕ ) − ∂ur
r ∂r
∂ϕ
∂f
1 ∂
r
∇f =
r ∂r
∂r
2
∇2~u
= ~ir
~iϕ
!
+
(C.13)
1 ∂2f
∂2f
+
r 2 ∂ϕ2
∂z 2
(C.14)
!
2 ∂uϕ
ur
+
∇2 u r − 2 − 2
r
r ∂ϕ
!
uϕ
2 ∂ur
2
∇ uϕ − 2 + 2
+
r
r ∂ϕ
~iz ∇2 uz
(C.15)
Appendice D
Cenni sulle Trasformate di
Fourier
D.1
Serie trigonometriche di Fourier
Qualunque funzione periodica con periodo T = 2π che soddisfi alle condizioni
f (2π) = f (0), f ′ (2π) = f ′ (0) può essere sviluppata in serie trigonometrica
del tipo
f (x) =
∞
X
1
(an cos(nx) + bn sin(nx))
a0 +
2
n=1
(D.1)
con
a0 =
1
π
Z
π
an =
1
π
Z
π
bn =
1
π
Z
π
−π
f (x) dx
(D.2)
f (x) cos(nx) dx
n = 0, 1, 2, ....
(D.3)
f (x) sin(nx) dx
n = 1, 2, ....
(D.4)
−π
e
−π
La (D.1) è un esempio particolare di serie di Fourier, come derivante
dal teorema di Fourier: una funzione f(x), di periodo 2π ma forma arbitraria
sopra una lunghezza uguale al periodo, può ottenersi come somma di funzioni
sinusoidali con periodi pari a sottomultipli di T (cioè T , T /2, T /3, ... ).
(Si noti che le funzioni √1π cos(mx) e √1π sin(nx) con m = 0, 1, 2, ..
e n = 0, 1, 2, .., ortonormali sull’intervallo (−π, π), costituiscono una base
ortonormale sullo stesso intervallo).
Si può dimostrare che se f (x) è sommabile nell’intervallo x(0, 2π) ed
è di classe C 1 nell’intorno di un punto x0 , la serie di Fourier corrispondente
converge puntualmente a
i
1h
−
f (x+
)
+
f
(x
)
0
0
2
f (x0 ) =
(D.5)
−
avendo indicato con f (x+
0 ) e f (x0 ) i limiti destro e sinistro della funzione in
x0 . Una funzione pari nell’intervallo (0, 2π) si sviluppa in serie di soli coseni,
mentre una funzione dispari si sviluppa in serie di soli seni.
Per le formule trigonometriche di Eulero, la (D.1) si può equivalentemente scrivere nella forma
f (x) =
+∞
X
An einx
(D.6)
−∞
Per calcolare i coefficienti An moltiplichiamo ambo i membri della (D.6) per
e−imx e integriamo tra 0 e 2π. Usando la relazione di ortonormalità
Z
2π
0
eix(n−m) dx = 2 π δnm
(D.7)
ove δnm è il simbolo di Kronecker e vale 0 se n 6= m, 1 se n = m, abbiamo
1
2π
Z
2π
0
f (x)e−ixm dx =
∞
X
An δnm = Am
(D.8)
−∞
Se ora consideriamo lo sviluppo (D.6) e usiamo la (D.7) abbiamo
1
2π
Z
2π
0
| f (x) | =
=
Z 2π
1 X
An A∗m
eix(n−m) dx
2π n,m
0
∞
X
n=−∞
| An |2
(D.9)
che stabilisce la completezza della serie di Fourier e prende il nome di teorema di Parseval. Di consueto, per simmetria, si considera lo sviluppo
nell’intervallo simmetrico (−π, π), per cui le (D.6) e (D.8) diventano
f (x) =
An einx
X
(D.10)
n
An =
1
2π
Z
π
−π
f (x)e−ixn dx
(D.11)
D.2
Integrale di Fourier
Le considerazioni precedenti possono essere estese al caso di una funzione
qualsiasi (cioè non periodica o , che è lo stesso, periodica con periodo infinito)
se, formalmente facciamo il limite T → ∞ nelle equazioni precedenti. Per
questo poniamo
2πn
≡ kn
(D.12)
T
e
1
1 Z T /2 −ikn x
F (kn ) ∆k
(D.13)
e
f (x) dx = √
An =
T −T /2
2π
ove
Z T /2
1
F (kn ) ≡ √
e−ikn x f (x) dx
(D.14)
2π −T /2
e ∆k = 2π/T. Le (D.10) e (D.11) divengono allora quando T → ∞ e
supponendo convergenti tutti i limiti coinvolti
1 Z∞
f (x) = √
F (k) eikx dk
(D.15)
2π −∞
Z ∞
1
f (x) e−ikx dx
(D.16)
F (k) = √
2π −∞
Convenzionalmente si dice che F (k) è la trasformata di Fourier di f (x) e che
f (x) è l’ antitrasformata di Fourier di F (k).
Considerando le condizioni sotto le quali il passaggio al limite dal
caso discreto al caso continuo può essere effettuato, si può dimostrare che
condizione necessaria e sufficiente affinchè una funzione ammetta trasformata
di Fourier è che essa sia di classe L2 , cioè che l’integrale del suo modulo quadro
tra −∞ e +∞ sia finito.
In maniera analoga e sotto condizioni del tutto simili, il formalismo
delle trasformate di Fourier si estende al caso tridimensionale:
Z
1
~
f (~r) =
F (~k) eik·~r d3~k
(D.17)
3/2
(2π)
F (~k) =
1 Z
~
f (~r) e−ik·~r d3~r
3/2
(2π)
(D.18)
Per una descrizione più completa dell’argomento si faccia riferimento agli appunti del Corso di Metodi Matematici 1 (reperibili all’indirizzo:
http://www.ph.unit.it/ccl/riforma/progr 2000 comdid.html)
Appendice E
Cenni sui tensori
E.1
Generalità sui tensori
Un tensore è una entità costituita da componenti che, in genere, sono funzioni di un certo numero di variabili indipendenti (le coordinate in un certo
spazio, che individuano un punto dello spazio). L’insieme delle componenti
si comporta come un tensore o meno a seconda del modo in cui le componenti
si trasformano per un cambiamento di coordinate.
In uno spazio a n dimensioni (cioè n variabili o coordinate) un tensore
di rango r ha nr componenti. Un tensore di rango zero ha una sola componente A ed è chiamato scalare. Un tensore di rango 1 ha n componenti
(A1 , A2 , ...An ) ed è chiamato vettore. Un tensore di rango 2 ha n2 componenti
e si può rappresentare sotto forma matriciale:
A11 A12
A21 A22
...
...
An1 An2
... A1n
... A2n
... ....
... Ann
Il tensore è detto singolare se il determinante della matrice è nullo ed è detto
simmetrico se Aij = Aji per tutti gli indici i e j. I tensori di rango più alto
vengono rappresentati indicando la componente generica, Aijk per un tensore
di rango 3, Aijkl per un tensore di rango 4 e cosı̀ via. In genere bisogna tenere
conto dell’ordine degli indici, cioè A123 6= A231 , a meno di particolari proprietà
di simmetria del tensore. Si noti che quando si rappresentano le componenti
di un tensore di rango 2, Aij , sotto forma di matrice il primo indice si riferisce
sempre alla riga, il secondo alla colonna.
E.2
Definizione di tensore
Si consideri un sistema di coordinate xi i=1, 2, ... n nello spazio a n di′
mensioni ed un secondo sistema di coordinate xl l=1, 2, ... n. Siano Aij...k
′
le componenti di un tensore nel sistema delle xi e Alm...n le sue componenti
′
′
nel sistema delle xl . Si supponga che i due sistemi delle xi e delle xj siano
legati da una trasformazione di coordinate che non sia singolare, cioè che le
′
equazioni che esprimono le xl in funzioni delle xi siano invertibili in modo da
′
poter esprimere le xi in funzione delle xj , e che le funzioni che specificano la
′
trasformazione xl = f (xi ) siano derivabili tante volte quanto è necessario.
′
Un’entità con componenti Aij...k nel sistema delle xi e Alm...n nel si′
stema delle xl si comporta per definizione come un tensore covariante per la
′
trasformazione xi → xl se
′
Alm...n =
X X
i
...
j
X
∂xi ∂xj
∂xk
...
′
′
∂xl ∂xm
∂x′n
Aij...k
k
(E.1)
Similmente Aij...k si comporta per definizione come un tensore controvariante
′
per la trasformazione xi → xl se
′
′ lm...n
A
=
X X
i
...
j
X
′
′
∂xl ∂xm
∂xn
...
∂xi ∂xj
∂xk
ij...k
A
k
(E.2)
Infine Ai...j
k...l si comporta per definizione come un tensore misto per la trasfor′
mazione xi → xl se
′
′ m...n
Ap...q =
X
i
...
X
j
...
X
k
...
X
l
Ai...j
k..l
′
∂xm ∂xn ∂xk ∂xl
...
...
∂xi
∂xj ∂x′p ∂x′q
(E.3)
Se si afferma semplicemente che una entità è un tensore si intende che essa si comporta come un tensore per tutte le trasformazioni delle coordinate
pertinenti, non singolari e derivabili. Si può osservare che in ogni dato punto
′
sono numeri puri, per cui le trasformazioni di tensori (E.1)–(E.3) sono
le ∂x
∂x
lineari: le componenti nel nuovo sistema sono funzioni lineari delle componenti nel vecchio, con coefficienti uguali a prodotti di derivate parziali prime
calcolate nel punto dato.
Tensori covarianti comportano derivate delle vecchie coordinate rispetto alle nuove e vengono indicati con indici posti a pedice; tensori controvarianti comportano derivate delle nuove coordinate rispetto alle vecchie
e vengono indicati con indici posti ad apice; tensori misti, infine comportano
derivate di entrambi i tipi e vengono indicati con indici ad apice e a pedice in
corrispondenza delle coordinate per le quali si hanno trasformazioni di tipo
controvariante e covariante rispettivamente.
Le definizioni date, applicate ad un tensore di rango zero (scalare)
′
comportano che A = A; perciò uno scalare è funzione solo della posizione, è
indipendente dal sistema di coordinate e viene detto invariante.
Ricordiamo, infine, il teorema principale del calcolo tensoriale: se due
tensori dello stesso tipo sono uguali in un sistema di coordinate, lo sono in
tutti i sistemi.
Appendice F
Cenni sulle funzioni di Bessel
Riassumiamo brevemente definizioni e proprietà delle funzioni di Bessel.
L’equazione differenziale
1 dR
d2 R
+
+
2
dx
x dx
ν2
1− 2 R = 0
x
!
(F.1)
prende il nome di equazione di Bessel; le sue soluzioni sono chiamate funzioni di Bessel di ordine ν. La forma esplicita della soluzione, indicata
comunemente con Jν (x), è:
Jν (x) =
ν X
∞
x
2
(−1)j
j=0 j! Γ(j + ν + 1)
2j
x
2
(F.2)
e prende il nome di funzione di Bessel di prima specie di ordine ν; Γ è la
funzione di Eulero, la cui rappresentazione integrale è:
Γ(z) =
Z
0
∞
e−t tz−1 dt
(F.3)
Si può dimostrare che la serie che definisce la Jν (x) converge per tutti i valori
finiti di x e per ogni ν. Se ν non è un numero intero, la funzione J−ν (x), che
è a sua volta soluzione della (F.1), risulta linearmente indipendente da Jν (x)
e le due funzioni J±ν (x) costituiscono una coppia di soluzioni linearmente indipendenti dell’equazione differenziale di second’ordine di Bessel. Se, invece,
ν è un numero intero, le due soluzioni sono linearmente dipendenti e vale la
relazione:
J−ν (x) = (−1)ν Jν (x)
(F.4)
Pertanto è necessario trovare un’altra soluzione linearmente indipendente
quando ν è intero. Normalmente, anche quando ν non è un intero, si sostituisce la coppia J±ν (x) con la coppia costituita la Jν (x) e da Nν (x), la
cosiddetta funzione di Neumann o funzione di Bessel di seconda specie:
Nν (x) =
Jν (x) cos νπ − J−ν (x)
sin νπ
(F.5)
che è linearmente indipendente da Jν (x), qualunque sia ν.
Accanto alle funzioni di Bessel di prima e di seconda specie è sovente
utile considerare le cosiddette funzioni di Bessel di terza specie o funzioni di
Hankel, definite come particolari combinazioni lineari di Jν (x) e Nν (x):
Hν(1) (x) = Jν (x) + iNν (x)
Hν(2) (x) = Jν (x) − iNν (x)
(F.6)
esse formano un insieme fondamentale di soluzioni dell’equazione di Bessel, al
pari delle Jν (x) e Nν (x). Si noti che, facendo un parallelismo tra le funzioni
di Bessel e le funzioni trigonometriche, si può dire, in un certo senso, che
le funzioni Jν (x) e Nν (x) stanno a cos x e sin x come le funzioni Hν(1) (x) e
Hν(2) (x) stanno agli esponenziali eiz e e−iz ; come in certi problemi che portano
a considerare funzioni di tipo trigonometrico è più opportuno a volte servirsi
di seno e coseno e a volte di esponenziali, cosı̀ nei problemi che portano alle
funzioni di Bessel si useranno, di volta in volta, come sistema fondamentale
di soluzioni, o le funzioni Jν (x) e Nν (x) o le funzioni di Hankel, a seconda
del particolare problema.
Tutte le funzioni Jν (x), Nν (x), Hν(1) (x), Hν(2) (x) soddisfano le formule
ricorrenti
Ων−1 (x) + Ων+1 (x) =
2ν
Ων (x)
x
(F.7)
dΩν (x)
dx
(F.8)
Ων−1 (x) − Ων+1 (x) = 2
dove Ων (x) è una qualsiasi delle funzioni suindicate. In particolare, tenuto
′
conto della (F.4), per ν intero si ha J0 (x) = (−1) J1 (x).
In figura F.1 sono riportate le funzioni di Bessel di prima e di seconda
specie di ordine 0 e 1; in figura F.2, invece, sono riportate le derivate prime
delle funzioni J0 (x), J1 (x), N0 (x) ed N1 (x).
Per completezza, riportiamo i comportamenti asintotici dei vari tipi di
funzioni di Bessel per valori molto grandi e molto piccoli dell’argomento. Per
semplicità indicheremo soltanto i termini dominanti dei rispettivi sviluppi:
Figura F.1:
• x << 1
Jν (x) →
Nν (x) →
1
Γ(ν+ 1)
2
π
h
ln
x
2
2
x
2
i
+ 0.5772 ...
− Γν
π
ν
2
x
ν = 0
ν 6= 0
(F.9)
In queste formule si assume che ν sia reale e non negativo.
• x >> 1, ν ≥ 0
Jν (x) →
Nν (x) →
q
2
πx
q
2
πx
cos x −
νπ
2
−
π
4
sin x −
νπ
2
−
π
4
(F.10)
La transizione dal comportamento per x piccolo alla forma asintotica per x
grande avviene nella regione x ≃ ν.
Dalle espressioni asintotiche (F.10) risulta chiaro che ciascuna delle
funzioni di Bessel, presentando un andamento oscillatorio attorno al valore
zero, ha un numero infinito di zeri; questo è visibile nella figura (F.1) per le
funzioni di prima e seconda specie di ordine 0 e 1, mentre dalla figura (F.2)
si può dedurre che anche le derivate prime delle summenzionate funzioni
godono della stessa proprietà. Consideriamo in particolare le radici di Jν (x):
Jν (xνm ) = 0
n = 1, 2, 3, ....
(F.11)
Figura F.2:
dove xνm è la radice m–esima di Jν (x). Per i primi tre valori di ν le prime
tre radici sono:
ν=0, x0n = 2.405, 5.520, 8.654, ...
ν=1, x1n = 3.832, 7.016, 10.173, ...
ν=2, x2n = 5.136, 8.417, 11.620, ...
(si noti che gli zeri risultano spaziati di circa π.)
Per gli zeri ulteriori la formula asintotica:
xνn ≃ nπ + (ν − 1/2)
π
2
(F.12)
dà una approssimazione sufficiente.
Le funzioni di Bessel di ordine intero (ν=n) vengono anche indicate come funzioni di Bessel cilindriche, mentre si indicano generalmente col
nome di funzioni di Bessel sferiche quelle ad indice semintero (ν= n+1/2).
Tali denominazioni derivano dalle simmetrie dei problemi che portano alla
considerazione di queste funzioni.
È invalso l’uso di definire le funzioni sferiche di Bessel e Hankel,
indicate con i simboli jl (x), hl (x) e nl (x), nel modo seguente:
π 1/2
Jl+1/2 (x)
2x
1/2
π
nl (x) =
Nl+1/2 (x)
2x
jl (x) =
(1,2)
hl (x)
=
π
2x
(2)
1/2 h
Jl+1/2 (x) ± iNl+1/2 (x)
(1)
i
(F.13)
Per x reale hl (x) è il complesso coniugato di hl (x).
Per i primi valori dell’indice l, le forme esplicite delle (F.13) sono:
j0 (x) = sinx x
n0 (x) = − cosx x
ix
(1)
h0 (x) = eix
x
j1 (x) = sin
− cosx x
x2
x
n1 (x) = − cos
− sinx x x2 ix
(1)
h1 (x) = − ex 1 + xi
j2 (x) = x33 − x1
n2 (x) = − x33 −
(1)
ix
x
sin x − 3 cos
x2
1
x
cos x − 3 sin
x
x2
h2 (x) = iex 1 + 3ix − x32
j3 (x) = x154 − x62 sin x − x153 −
n3 (x) = −
(1)
h3 (x)
eix
x
15
4
x
−
6
x2
6i
x
cos x −
15
x2
15
x3
15i
x3
1
x
−
cos x
1
x
sin x
1 +
−
−
=
in figura F.3 sono riportate j0 (x), n0 (x), j1 (x) e n1 (x).
Figura F.3:
Per piccoli valori di x si hanno le seguenti espressioni asintotiche:
xl
jl (x) →
(2l + 1) !!
x2
1 −
+ ...
2(2l + 3)
!
x2
1 −
+ ...
2(1 − 2l)
!
(2l − 1) !!
nl (x) → −
xl+1
(F.14)
Analogamente si ottengono le espressioni asintotiche per grandi valori di x:
!
1
lπ
jl (x) →
sin x −
x
2
!
lπ
1
nl (x) → − cos x −
x
2
eix
(1)
hl (x) → (−i)l+1
x
Le funzioni di Bessel sferiche soddisfano le relazioni ricorrenti:
2l + 1
zl (x) = zl−1 (x) + zl+1 (x)
x
′
zl (x) =
(F.15)
(F.16)
1
[lzl−1 (x) − (l + 1)zl+1 (x)]
2l + 1
(F.17)
(1)
(2)
dove zl (x) rappresenta una qualsiasi delle funzioni jl (x), nl (x), hl (x), hl (x).
Accenniamo, infine, alle funzioni di Bessel modificate. Esse sono
soluzioni dell’equazione differenziale:
d2 R
1 dR
+
−
2
dx
x dx
ν2
1+ 2 R = 0
x
!
(F.18)
e, come evidente, non sono altro che funzioni di Bessel con argomento immaginario puro. Ordinariamente, nella scelta di una coppia di soluzioni linearmente indipendenti, queste sono indicate come Iν (x) e Kν (x), e sono definite
dalle:
Iν (x) = i−ν Jν (ix)
Kν (x) =
(F.19)
π ν+1 (1)
i
Hν (ix)
2
(F.20)
che sono funzioni reali per x e ν reali. Le loro espressioni asintotiche per x
piccolo e per x grande, supponendo x reale e positivo o nullo, sono:
• x << 1
Iν (x) →
1
Γ(ν+ 1)
h
Kν (x) → − ln
x
2
Γν
2
ν
x
2
i
+ 0.5772 ...
ν
2
x
ν 6= 0
ν = 0
(F.21)
• x >> 1, ν ≥ 0
Iν (x) →
Kν (x) →
√1
2πx
q
π
2x
ex
e−x
(F.22)
In figura F.4 sono riportate I0 (x), K0 (x), I1 (x) e K1 (x).
Figura F.4: