Azionamento
motore
passo-passo
con il PC
1
Progetto per il controllo motore
passo-passo con il PC
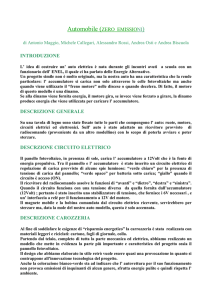
Il sistema è costituito da un Personal Computer con Bus ISA, una interfaccia d’uscita costituita da un buffer latch con il relativo circuito di decodifica, un circuito di controllo e un
circuito di potenza (figura 1). I dati sono trasmessi dal Personal Computer al circuito di
controllo il quale, a seconda dei livelli logici presenti ai suoi ingressi, fornisce al circuito di
potenza le sequenze di azionamento delle fasi del motore passo-passo.
Fig. 1
1.1
Circuito di decodifica con Buffer Latch
La decodifica utilizza una porta logica NAND a 13 ingressi, la linea AEN e la linea IOW
che, unitamente al segnale generato dalla decodifica, abilita il Buffer Latch 74ALS574.
L’alimentazione (+ 5 V) degli integrati TTL è prelevata dal Personal Computer. Sul connettore d’uscita sono disponibili (fig. 2):
Fig. 2
Fig. 3 – Scheda
OUT-PC 31 Fh per
controllare la scheda del motore passo-passo.
• il segnale di clock generato dal PC (D2);
• i segnali di abilitazione del circuito di controllo (D0), di direzione (D1), di reset (D3),
di passo (D4) e di controllo (D5);
• la tensione di alimentazione (5 V) per il circuito di comando (L297) e di potenza (L298)
ed il pin di massa.
In figura 2 è riportato lo schema elettrico dell’interfaccia, mentre in figura 3 il relativo master doppia faccia.
1.2
Circuito di controllo e di potenza
Lo schema del circuito di comando e di potenza del motore passo-passo è riportato in
figura 4.
Fig. 4
Fig. 5
L’integrato L297
Contiene la logica di controllo (fig. 5) per il comando del motore, richiede un’alimentazione singola (+5 V) ed eroga una corrente massima sulle fasi di 20 mA. Il suo uso semplifica il progetto del programma perché l’integrato genera le sequenze di segnali necessarie al circuito di potenza per azionare il motore.
Per sfruttare al massimo le caratteristiche di velocità e di coppia del motore, l’integrato
L297 agisce sulla durata dell’impulso di corrente circolante negli avvolgimenti del motore mediante due chopper con tecnica PWM. Di seguito viene descritta la piedinatura dell’integrato L297 con particolare riferimento ai segnali di comando TTL compatibili.
• OSC: una rete esterna RC connessa a questo terminale determina la frequenza del1
l’oscillatore interno f ≅
0, 69 ⋅ R ⋅ C
• ENABLE: segnale d’ingresso attivo a livello logico alto. L’integrato è abilitato quando
ENABLE = 1; le uscite INH1, INH2, A, B, C, e D sono invece tutte a livello logico basso
quando ENABLE = 0.
• CW / CCW: segnale d’ingresso che definisce il verso di rotazione. La rotazione è in
verso orario se CW / CCW = 1, in verso antiorario se CW / CCW = 0.
• HALF / FULL: segnale d’ingresso che definisce il modo di funzionamento a passo intero HALF / FULL = 0 o a mezzo passo HALF / FULL = 1.
• RESET: segnale d’ingresso attivo a livello logico basso. Quando RESET = 0 le uscite dell’integrato L297 assumono lo stato iniziale ABCD = 0101.
• CONTROL: ingresso di controllo che definisce l’azione del chopper. Quando CONTROL
= 1, gli impulsi applicati agli avvolgimenti del motore sono controllati direttamente
attraverso le linee A, B, C e D collegate allo stadio di potenza (chopping di fase), mentre quando CONTROL = 0 sono controllati sulle linee INH1 e INH2 (chopping INHIBIT ).
È consigliabile collegare l’ingresso CONTROL a massa perché questa configurazione
consente di ottimizzare il funzionamento del motore.
• SENS 1 e SENS 2: tensioni agli estremi dei sensori di corrente delle fasi AB e CD.
• CLOCK: il segnale applicato a questo d’ingresso deve essere un’onda quadra TTL compatibile. Ogni impulso determina la rotazione dell’albero del motore di un passo o
di mezzo passo a seconda del livello di tensione presente all’ingresso HALF / FULL.
La tensione di riferimento VREF = RS ⋅ Inom, dove Inom è l’intensità della corrente nominale del motore, deve essere compresa tra 0 V e 3 V. La resistenza di 22 kΩ ed il condensatore da 3,3 nF determinano la frequenza di clock dell’oscillatore interno.
L’integrato L298
È un circuito di potenza in grado di pilotare carichi fortemente induttivi (➜ Modulo 8,
unità 12, fig. 12.21). I diodi collegati sulle fasi del motore passo-passo devono essere del
tipo veloce (Schottky) perché sono attraversati dalla corrente di ricircolo quando viene
interdetto il ponte di transistor.
Il byte di comando dell’integrato L297 è riportato nella tabella 1. Considerando che il
bit D0 deve essere posto alternativamente a livello logico alto e basso, i due byte di
comando del motore sono 11h e 15h.
TAB. 1
D7
D6
D5
D4
D3
D2
---
---
CONTROLLO
PASSO
0
0
0
0
1
0
0
0
0
0
1
1
RESET CLOCK
D1
D0
Indirizzo
DIREZIONE
ABILITAZIONE
CODICE
1
1
11h
1
1
15h