")
Motori Stepper (o a passo)
Strutture
Variable Reluctance
Permanent Magnet
Caratteristiche
Ibrido
Svantaggi
•
Ruotano di un angolo fisso ad ogni impulso di corrente
•
Basso rendimento (limita la taglia)
•
Controllo della posizione ad anello aperto
•
Possibili risonanze
•
Coppia nominale allo spunto
•
Difficoltà ad operare ad alte velocità
•
Robustezza
•
g
Facile interfacciamento con circuiti digitali
•
Vasto range di velocità (0-4000 rpm)
Motori Stepper (o a passo)
Avvolgimento Unipolare
Motori Stepper (o a passo)
Avvolgimento Bipolare
Motori Stepper (o a passo)
Modalità – Full step (avvolgimento bipolare)
Motori Stepper (o a passo)
Modalità – Full step (avvolgimento bipolare)
Motori Stepper (o a passo)
Modalità – Halfstepping (avvolgimento bipolare)
Motori Stepper (o a passo)
M d lità - Microstepping
Modalità
Mi
t
i
Motori Stepper (o a passo)
Modo di funzionamento START-STOP
Il motore può essere avviato e fermato istantaneamente
Motori Stepper (o a passo)
Coppia di Pull-over = coppia massima sviluppata dal motore nel passaggio da una
successiva
posizione alla
Motori Stepper (o a passo)
Modo di funzionamento SLEWING
•
La velocità non riparte da zero all’inizio di ogni ciclo
•
A regime la velocità è quasi costante, la coppia d’inerzia è quindi trascurabile ed è possibile
sopportare un carico maggiore
maggiore, rispetto alla modalità Start-Stop,
Start Stop senza perdere il passo.
passo
•
Il motore deve essere avviato e fermato gradualmente per evitare la perdita del passo
Motori Stepper (o a passo)
C
Caratteristica
tt i ti elettromeccanica
l tt
i
•
Start-Stop Region – regione di funzionamento in modalità Start-Stop
•
Slew Region – regione di funzionamento in modalità Slewing
•
Coppia di Pull-in – massima coppia di carico consentita in funzionamento Start-Stop e massimo
valore di carico che consente l’avvio o la fermata istantanea del motore senza perdita di passo.
•
Maximum Start Rate – Massima frequenza degli impulsi che consente l’avviamento
l avviamento del motore
senza carico
•
Coppia di Pull-out – massima coppia di carico consentita per non perdere il passo
•
q
degli
g impulsi
p
che consente il funzionamento del motore
Maximum Slew Rate - Massima frequenza
senza carico
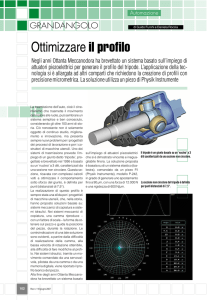
Attuatori 'Voice coil'
Gli attuatori lineari 'Voice coil' sono adatti ad applicazioni che richiedono corse comprese tra qualche micron e
diversi centimetri di piccola e media potenza come il posizionamento di ottiche e specchi o il controllo di valvole
pneumatiche o oleodinamiche.
oleodinamiche
Un attuatore 'Voice coil' è composto essenzialmente da due parti: una parte mobile costituita da un avvolgimento
posto su un supporto tubolare e una parte fissa, costituita da un magnete che circonda l'avvolgimento mobile e
dal nucleo ferromagnetico. Quando l'avvolgimento è percorso da corrente nascono forze, proporzionali alla
corrente, che tendono a spostare la parte mobile, producendo un moto lineare limitato.
Attuatori 'Voice coil'
Gli attuatori 'Voice coil' possono generare moto lineare o rotazionale di tipo limitato, ovvero moto rotazionale
continuo. I pregi maggiori di tali attuatori risiedono certamente nel comportamento pressocché lineare, nella
velocità di risposta e nell'elevato rapporto potenza/peso.
Un attuatore 'Voice coil' può essere usato per posizionamenti di precisione, in tal caso deve essere accoppiato ad
un opportuno sensore di posizione come potenziometri o LVDT
Attuatori 'Voice
Voice coil'
coil con moto rotazionale limitato sono comunemente utilizzati per pilotare il braccio delle testine
negli Hard Disk.
Attuatori Piezoelettrici
La proprietà di alcuni cristalli, come i quarzi, di generare una differenza di potenziale se sottoposti a deformazioni
meccaniche fu osservata per la prima volta nel 1881 da Pierre e Jacques Curie. Questo fenomeno è detto effetto
piezolelettrico diretto ed è quello sfruttato dai sensori piezoelettrici. Si può anche osservare il fenomeno opposto,
se cioè lo stesso materiale viene sottoposto ad un campo elettrico si deforma. Quest
Quest'ultimo
ultimo fenomeno è detto
effetto piezoelettrico inverso e viene sfruttato per realizzare attuatori piezoelettrici.
Il materiale piezoelettrico più comune è oggi un materiale ceramico denominato PZT (piombo zirconato titanato).
T l materiale
Tale
t i l deve
d
essere preventivamente
ti
t polarizzato
l i
t per assumere proprietà
i tà piezoelettriche.
i
l tt i h
Il processo di
polarizzazione viene attuato riscaldando il materiale e sottoponendolo a forti campi elettrici (2500 V/ mm). In tal
modo vengono allineati i domini elementari lungo una specifica direzione in modo che , dopo la polarizzazione, le
reazioni dei dipoli elementari a variazioni di campo elettrico danno luogo ad una risultante non nulla.
Attuatori Piezoelettrici
Gli attuatori piezoelettrici trovano applicazione in quei casi ove sia richiesta un'alta precisione, estrema
compattezza, elevata velocità di risposta, basso consumo e basse emissioni elettromagnetiche.
La forza generata da un attuatore piezoelettrico può infatti arrivare anche diverse centinaia di newton, con tempi di
risposta dell'ordine dei microsecondi e produrre moti oscillatori con frequenze di diverse decine di kHz. Tuttavia,
la corsa massima prodotta da un singolo elemento piezoelettrico è dell'ordine delle frazioni di micron. E' quindi
necessario comporre insieme centinaia o migliaia di elementi piezoelettrici o amplificare meccanicamente le
deformazioni per per generare deformazioni di pratica utilità.
Le principali strutture utilizzate per realizzare attuatori piezoelettrici sono la unimorfa,
unimorfa la bimorfa e lo stack.
stack
Gli attuatori piezoelettrici possono essere accoppiati a sensori di deformazione come strain gauge, sensori
induttivi o capacitivi per realizzare sistemi di posizionamento ad alte prestazioni.
Alcune applicazioni degli
attuatori piezoelettrici riguardano la manipolazione genetica, la cancellazione di vibrazioni, l'allineamento di fibre
ottiche, l'allineamento di parti di meccanismi di precisione, il controllo di valvole idrauliche, la stabilizzazione delle
immagini e l'allineamento delle maschere nella produzione dei wafer nell'industria elettronica.
Attuatori Piezoelettrici
Una struttura unimorfa è composta da un elemento piezoceramico incollato su un supporto passivo di maggiori
dimensioni.
La deformazione dell'elemento piezoelettrico causa una deformazione dell'intera struttura,
amplificando il moto prodotto.
Una struttura bimorfa viene ottenuta saldando due elementi piezoelettrici in modo che diano luogo ad opposte
deformazioni quando sottoposti alla stessa tensione, in modo da causare un incurvamento dell'intera struttura.
Lo spostamento prodotto da una struttura bimorfa è molto più elevato rispetto a quello di una struttura unimorfa,
tale struttura trova dunque
q
applicazione
pp
in quei
q
casi ove l'ampiezza
p
del moto prodotto
p
è un fattore predominante
p
rispetto alla forza prodotta.
Att t i Pi
Attuatori
Piezoelettrici
l tt i i
Uno stack è composto da centinaia di elementi piezoelettrici connessi meccanicamente in serie ed elettricamente
in p
parallelo, in modo da generare
g
spostamenti
p
fino a qualche
q
centinaio di micron, con tensioni relativamente
contenute. La struttura interna di uno stack è composta da diversi strati di materiale piezoceramico sulle superfici
di ognuno dei quali sono depositati gli elettrodi metallici per la connessione al generatore di tensione.,
Motori a passo piezoelettrici
L' ff tt piezoeletrico
L'effetto
i
l t i inverso
i
può
ò essere utilizzato
tili
t per realizzare
li
motori
t i a passo micrometrici.
i
t i i Rispetto
Ri
tt aii comunii
motori a passo quelli piezoelettrici posseggono un minore tempo di risposta, una maggiore precisione,
comportamento più lineare, minori emissioni elettromagnetiche ed una maggiore compattezza.
un
Motori a passo piezoelettrici
Funzionamento di un motore lineare piezoelettrico a passo con onda stazionaria.
Motori a passo piezoelettrici
E’ possibile connettere meccanicamente in serie od in parallelo più unità per amplificare rispettivamente lo
spostamento o la forza. E’ pure possibile generare un moto rotazionale.
Attuatori a memoria di forma
Gli attuatori a memoria di forma sfruttano le proprietà di alcuni materiali di riassumere una forma predefinita
quando riscaldati oltre una certa temperatura, detta temperatura di trasformazione. Il materiale utilizzato negli
attuatori a memoria di forma è una lega di nickel e titanio denominata Nitinol. In un attuatore a memoria di forma è
presente un avvolgimento di Nitinol
facilmente deformato.
deformato
che
a temperature inferiori alla temperatura di transizione può essere
Quando però il Nitinol viene riscaldato oltre i 75
75°C
C vengono generate delle forze che
tendono a contrarre l'avvolgimento, che raggiunge la massima contrazione a 110°C. Raffreddando l'attuatore al di
sotto dei 60°C, in mancanza di sollecitazioni esterne esso riprende la forma a riposo.
Il riscaldamento del
materiale a memoria di forma è di tipo ohmico, cioè attuato facendo scorrere attraverso il materiale una corrente
elettrica.
l tt i
elettriche.
Tali
T li attuatori
tt t i sono quindi
i di di tipo
ti
elettromeccanico,
l tt
i
pur non essendo
d considerati
id
ti delle
d ll macchine
hi
")