CORSO DI LAUREA IN TECNICHE DI RADIOLOGIA MEDICA, PER IMMAGINI E RADIOTERAPIA Dosimetria in Risonanza Magnetica: progettazione e realizzazione di un dispositivo di rilevazione del campo magnetico statico e misurazione giornaliera all’operatore. Relatore: Prof. Riccardo Biffi Elaborato di Laurea di: Victoria Mukhina Matricola: 816349 A.A. 2014 – 2015 Autorizzazione+alla+consultazione+dell’elaborato+finale+di+Laurea+
+
Il/la%sottoscritta%Victoria(Mukhina%%
%
%
n°%matr.%816349%
%
nata%a%Tashkent((UZ)%il%10/06/1989(
%
%
autore%dell’elaborato%scritto%dal%titolo:%
%
%
%
%
%
%
%
%%%%%%%%%%%%%%%%%%%%%%%%%%
%
%
%
%
%
%
%
Dosimetria in Risonanza Magnetica: progettazione e realizzazione di un
dispositivo di rilevazione del campo magnetico statico e misurazione
giornaliera all’operatore
+
+
!%autorizza+
%
%non+autorizza%
%
la%consultazione%dell’elaborato%stesso,%fatto%divieto%di%riprodurre,%in%tutto%o%in%parte,%
quanto%in%esso%contenuto.%
%
Data%12/11/2015( %
%
%
%
%
%
%
%
%
%
%
%
Firma%
%
%
(apporre%una%X%sulla%casella%scelta)%
%
Spazio+riservato+all’Ufficio+Segreteria%
%
Il/la%
.......................................................................................................................................................%
%
Laureato%in%«Tecniche%di%Radiologia%Medica,%per%immagini%e%radioterapia»%
%
con%la%votazione%di:%
%
(in%cifre)%..............................%(in%lettere)%....................................................................................%
%
e%registrato%al%progressivo%N°%..............%del%registro%numero%..................%dei%verbali%di%
laurea%
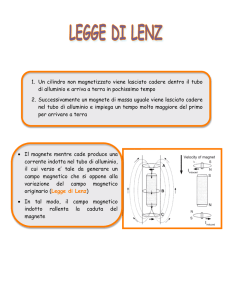
2 Indice INTRODUZIONE 5 NOZIONI FONDAMENTALI 7 1.1. PRINCIPI FISICI DI RISONANZA MAGNETICA 1.2. IL SISTEMA A RISONANZA MAGNETICA 1.2.1. IL MAGNETE 1.2.2. SISTEMA DEI GRADIENTI DI CAMPO MAGNETICO 1.2.3. BOBINE PER GLI IMPULSI RF 1.2.4. IL COMPUTER 1.3. GRANDEZZE FISICHE E UNITÀ DI MISURA 7 11 12 14 15 18 18 ANALISI DEI RISCHI SANITARI IN RISONANZA MAGNETICA 21 2.1. CAMPO MAGNETICO STATICO 2.2. CAMPO MAGNETICO VARIABILE NEL TEMPO 2.3. CAMPI A RADIO FREQUENZA 21 24 25 IL REGOLAMENTO DI SICUREZZA IN RM 27 3.1. RIFERIMENTI NORMATIVI ITALIANI 3.2. LIMITI DI ESPOSIZIONE DEI LAVORATORI 3.3. LINEE GUIDA INTERNAZIONALI SUI LIMITI DI ESPOSIZIONE A CMS 28 30 32 OBIETTIVO DELLA TESI 35 MATERIALI E METODI 36 5.1. ARDUINO 5.2. DESCRIZIONE HARDWARE 5.3. DESCRIZIONE SOFTWARE 5.3.1. AMBIENTE DI SVILUPPO ARDUINO 5.3.2. LIBRERIE UTILIZZATE 5.3.3. PRESENTAZIONE CODICE 5.4. SITO DI RISONANZA MAGNETICA NEL REPARTO DI NEURORADIOLOGIA ALL’OSPEDALE MAGGIORE POLICLINICO DI MILANO 5.5. MISURAZIONE ALL’OPERATORE 37 39 45 45 47 49 RISULTATI 57 CONCLUSIONI 61 RINGRAZIAMENTI 63 BIBLIOGRAFIA (SITOGRAFIA) 64 APPENDICE 65 INDICE DELLE FIGURE 73 INDICE DELLE TABELLE 73 50 52 4 Introduzione Le persone in tutto il mondo sono costantemente esposte a sorgenti di radiazioni naturali o artificiali: le radiazioni sono in genere classificate in ionizzanti e non ionizzanti, e in queste ultime rientrano i campi elettrici e magnetici (EMF). È ormai noto che le radiazioni ionizzanti rappresentano un rischio per la salute umana, tuttavia i possibili effetti dei campi elettromagnetici sono ancora oggi oggetto di continue controversie. La Risonanza Magnetica (RM) è una delle più diffuse sorgenti di campi elettromagnetici essendo una tecnica diagnostica largamente utilizzata in diversi campi della medicina. Grazie al fatto che non utilizza radiazioni ionizzanti essa è ritenuta intrinsecamente sicura per il paziente. Tuttavia, durante un esame RM il paziente è sottoposto a campi elettromagnetici di diversa natura ed intensità che implicano la somministrazione di energia ai tessuti biologici. Quindi, l’interazione tra energia somministrata e tessuti biologici potrebbe comportare rischi per la salute e deve quindi essere presa in considerazione. Questi rischi sono legati a tutte le componenti di campo magnetico presenti in RM (campo magnetico statico, gradienti di campo e campo magnetico a radiofrequenza) a cui sono esposti sia i pazienti che lo staff operante nell’ambiente RM. Lo staff RM, soprattutto i tecnici che si occupano della preparazione e assistenza del paziente, durante il lavoro giornaliero è continuamente esposto in maniera prolungata al campo magnetico statico e spazialmente eterogeneo presente in ogni momento nella sala RM. Inoltre, muovendosi all’interno della stanza RM per espletare le loro funzioni, i tecnici sono esposti a campo magnetico variabile lentamente nel tempo (< 1 Hz) che 5 induce correnti elettriche nel corpo. Nonostante non ci siano ancora conferme sui possibili effetti nocivi sulla salute umana di questa corrente indotta, la Comunità Europea ha redatto una Direttiva (Direttiva 2004/40/EC) nella quale si pone un limite di sicurezza a questa corrente espressa come densità di corrente indotta (mA/m2) nella testa o nel tronco. Nell'ʹelaborato si descrive la realizzazione e la messa in opera di un sistema per il monitoraggio del campo magnetico statico di un sito di Risonanza Magnetica all’Ospedale Maggiore Policlinico Ca’ Granda di Milano. I campioni misurati e successivamente registrati su un’apposita scheda di memoria SD potranno essere trasferiti su un PC per poter essere analizzati tramite dei comuni programmi come Microsoft® Excel o Open Office Calc. La realizzazione di questo progetto nasce dalla curiosità di verificare la reale esposizione a campi magnetici statici del personale operante in RM durante il turno di lavoro e di confrontare i dati ottenuti con i limiti previsti dalla normativa. 6 CAPITOLO 1 Nozioni fondamentali 1.1. Principi fisici di Risonanza Magnetica La Risonanza magnetica (RM) è una tecnica che usa potenti magneti e radioonde per analizzare le strutture interne del corpo. Essa combina i vantaggi delle altre tecniche di Imaging esistenti, senza tuttavia spartirne gli svantaggi. Come la Tomografia Computerizzata fornisce immagini tomografiche ed è dotato di eccellente risoluzione spaziale e di contrasto, come l’Ecotomografia non usa radiazioni ionizzanti e produce immagini multiplanari, come la Medicina Nucleare infine è in grado di fornire informazioni sui processi metabolici a livello tissutale. In natura i nuclei di alcuni elementi con numero dispari di protoni e/o neutroni (come ad es.: 1H, 31P, 19F, 13C) sono dotati di spin intrinseco cioè ruotano intorno a se stessi. Dato che ogni carica elettrica in movimento produce un campo magnetico, anche questi nuclei, carichi elettricamente e dotati di spin, sono associati ad un campo magnetico microscopico detto momento magnetico nucleare o dipolo magnetico. In parole più semplici ogni singolo nucleo dotato di spin può essere considerato come un piccolo magnete. L’immagine RM si basa sullo studio delle proprietà magnetiche del nucleo dell’idrogeno o protone. L’idrogeno, infatti, rispetto agli altri elementi utilizzabili in RM è il più abbondante nell’organismo, ed è quello che produce segnale più intenso. In assenza di alcun campo magnetico esterno, i momenti magnetici dei singoli protoni o nuclei di idrogeno sono orientati casualmente, nello stato 7 di massimo disordine: pertanto la loro somma, magnetizzazione risultante (M), è praticamente nulla. Se l’insieme dei nuclei viene posto in un campo magnetico omogeneo di forte intensità (B0), essi si possono orientare secondo la direzione del campo B0 , con verso parallelo o antiparallelo (Fig. 1). Precisamente, per il nucleo di idrogeno, per il quale sono possibili solo due livelli energetici quantici, poco più della metà dei momenti magnetici si orienta nello stesso verso di B0 (orientamento parallelo), poco meno della metà si orienta invece con il verso opposto (orientamento antiparallelo). Le casuali interazioni termodinamiche che intercorrono tra dipoli magnetici e macromolecole che li circondano determinano continua modificazione dell’orientamento degli spin, che quindi oscillano tra la situazione a minore energia e quella a energia più alta. Inoltre, sempre per effetto di B0 il momento magnetico di ciascun protone comincia a ruotare, cioè a precedere attorno alla direzione di B0. Il movimento di precessione di ogni elemento si caratterizza per una velocità e per una frequenza definite. Quest’ultima è funzione solamente dell’intensità del campo magnetico statico B0. Lo stato di equilibrio può essere alterato mediante l’applicazione di onde elettromagnetiche la cui frequenza sia uguale a quella della precessione nucleare (frequenza di Larmor). Solo in tali condizioni si verifica il fenomeno di Risonanza Magnetica, con passaggio di energia dalla radiazione elettromagnetica al sistema di nuclei. La radiazione elettromagnetica usata per provocare la Risonanza Magnetica dei nuclei di idrogeno viene comunemente denominata radiofrequenza (RF). Nel campo di imaging la RF viene applicata per tempi molto brevi (dell’ordine di microsecondi) per cui si parla di impulsi RF. L’applicazione di RF equivale all’applicazione di un secondo campo magnetico perpendicolare a B0, detto B1, ha un’intensità molto minore a B0 e 8 ruota nel piano x,y perpendicolare a B0, ad una frequenza uguale a quella della precessione nucleare, inducendo così il fenomeno di Risonanza Magnetica Nucleare. Orientamento dei Schema per la somma MM dipoli magnetici vettoriale dei dipoli risultante nucleari In assenza di B0 nessuna In presenza di B0 In presenza di B0 e RF 90° Fig. 1 – Tabella riassuntiva dei vettori di mm e MM. La stimolazione RF, in condizioni di Risonanza provoca due fenomeni simultanei. In primo luogo i nuclei di idrogeno tendono a precedere oltre che intorno a B0 anche intorno a B1 ed in fase con esso; di conseguenza tutti i nuclei non solo hanno la stessa frequenza, ma anche la stessa fase di precessione (Fig. 2). In secondo luogo, alcuni protoni passano dal livello energetico basso al livello energetico alto. Questi due fenomeni spostano la Magnetizzazione risultante (M) dal suo allineamento con B0. M si allontana dall’asse z seguendo la precessione nucleare; compie pertanto una traiettoria a spirale. Più intenso e prolungato è l’impulso RF, maggiore è l’angolo con cui M si allontana dall’asse z. A questa situazione corrisponde la scomparsa di M sul piano longitudinale (ML) e la creazione di una 9 magnetizzazione trasversale (MT), rotante sul piano xy, ortogonale a z. Fig. 2 -­‐‑ Precessione libera (A) e in coerenza di fase (B) Questo processo si verifica per impulsi a 90°, che consistono nell’invio di un’onda radio alla frequenza di Larmor con ampiezza e durata tali da mutare la Magnetizzazione longitudinale dalla sua posizione originaria fino al piano trasverso xy (Fig.3). Il sistema di spin, al finire dello stimolo esterno, tende a ripristinare le condizioni iniziali, energicamente più favorevoli (rilassamento). Tale riassetto nucleare comporta la cessione di energia e, quindi, una variazione in Magnetizzazione Trasversa che, in quanto campo magnetico variabile nello spazio, genera una forza elettromotrice (fem) in una bobina opportunamente orientata, solitamente la stessa che ha inviato l’impulso, posta alternativamente in condizione di trasmissione e di ricezione. La fem indotta nella bobina rappresenta la base del segnale, che viene chiamato Free Induction Decay (FID). 10 Fig. 3 -­‐‑ Invio dell'ʹimpulso RF e creazione della MMT Solo la Magnetizzazione Trasversa attraversa l’antenna ricevente e vi genera la FID, potendo così essere rilevata e misurata, al contrario la Magnetizzazione Longitudinale non genera alcun segnale e non è pertanto misurabile direttamente. 1.2. Il sistema a Risonanza Magnetica Il tomografo RM si configura come un sistema estremamente complesso. La formazione dell’immagine in Risonanza Magnetica richiede un potente campo magnetico, che sia anche uniforme e stabile, per magnetizzare l’oggetto in esame. Sono inoltre richiesti gradienti magnetici, di più debole intensità e rapidamente variabili nel tempo; un sistema per la trasmissione/ricezione della radiofrequenza; ed un sistema di elaborazione dati. Le apparecchiature che provvedono a ciascuna di queste esigenze possono essere considerate come sottosistemi, integrati nell’unità RM. L’impianto di RM deve inoltre essere ospitato all’interno di un sito idoneo a contenere il campo magnetico generato. È evidente come l’apparecchiatura a Risonanza Magnetica sia una macchina molto sofisticata, nella cui progettazione e realizzazione sono coinvolte competenze multiple elettrotecniche, elettroniche, informatiche e sistemistiche. 11 Le componenti del tomografo sono essenzialmente suddivisi in quattro gruppi funzionali: -­‐‑
Magnete -­‐‑
Sistema di gradienti -­‐‑
Bobine RF -­‐‑
Computer 1.2.1. Il magnete Il magnete ha il compito di generare il campo magnetico statico, o principale, caratterizzato da intensità, omogeneità e stabilità temporale. L’intensità di campo è misurata in Tesla (1 T= 10000 Gauss) e varia nei sistemi di imaging attualmente disponibili tra 0,2 e 3 T, con larga diffusione della fascia media (da 0,5 a 1,5 T), giudicata la più valida alla formazione di immagini di buona qualità ed elevato contenuto diagnostico. I magneti che sono utilizzati nei sistemi RM sono caratterizzati da un’alta omogeneità. Piccole disomogeneità nel campo magnetico comportano variazioni consensuali delle frequenze di precessione dei singoli spin, rendendone impossibile la fine discriminazione spaziale. Le apparecchiature RM sono dotate di sistemi di stabilizzazione e taratura dell’omogeneità del campo magnetico: bobine di shimming. I magneti utilizzati negli scanner RM devono essere inoltre caratterizzati da un’ elevata stabilità nel tempo e possono essere di diverso tipo: permanenti, resistivi, superconduttivi e ibridi. A seconda del tipo di magnete cambiano i costi e le performance dello scanner ed è necessario affrontare diverse questioni nell’ambito della sicurezza e della gestione della sala magnete. 12 -­‐‑
I magneti resistivi sono costituiti da un avvolgimento elettrico percorso continuamente da corrente e raffreddato ad acqua. Per le elevate potenze necessarie all’alimentazione del magnete, si possono realizzare solo campi relativamente bassi: fino a 0,35 T. A loro svantaggio c’è l’elevato consumo di energia elettrica, la necessità di un sistema di raffreddamento ad acqua, e la loro alta sensibilità ai disturbi esterni. -­‐‑
I magneti superconduttivi sono realizzati con spire di materiali superconduttori che, a temperature prossime allo zero assoluto, possono essere percosse da corrente senza dispersione di calore. Generano un forte campo magnetico omogeneo dell’ordine dei Tesla e trovano impiego per la massima parte sui sistemi classici a tunnel. È indispensabile la presenza di un sistema di refrigeramento o mantenimento della temperatura del magnete poiché la sua stabilità termica si riflette sull’omogeneità del campo magnetico. Deve essere tenuto al di sotto della temperatura critica in modo da avere una resistenza praticamente nulla: il refrigeramento avviene con sistemi ad elio liquido che, in caso di perdite, comportano rischi per pazienti ed operatori. -­‐‑
I magneti permanenti sono costituiti da una serie di blocchi di materiale ferromagnetico (può essere magnetizzato) con il quale si possono realizzare solo campi magnetici relativamente bassi, fino a circa 0.35 T. Impiegati soprattutto nei sistemi aperti a basso campo, sono molto pesanti ma, a loro vantaggio, non richiedono liquidi criogeni e non consumano energia elettrica per il mantenimento del campo magnetico. Sono però molto sensibili alla temperatura e devono essere costantemente riscaldati ad una temperatura 24° -­‐‑ 32° mentre l’ambiente circostante viene costantemente climatizzato a 23° 13 -­‐‑ 25° per stabilizzare il flusso termico. Dal momento che le variazioni della temperatura comportano un’instabilità del campo magnetico con effetti importanti sulla qualità d’immagine, qualora si spegnesse anche per poche ore l’impianto di climatizzazione della sala magnete, si devono di conseguenza attendere diverse ore per riottenere la necessaria qualità di campo magnetico. -­‐‑
I magneti ibridi uniscono la tecnologia resistiva e quella permanente, consentendo di realizzare campi fino a 0,5 T. Sono realizzati con fili resistivi percorsi da corrente e avvolti attorno a magneti permanenti. Il campo generato ha l’orientamento verticale e ha poca dispersione. La configurazione geometrica è aperta e non occorrono liquidi criogeni per il raffreddamento. Tuttavia si ha un elevato consumo energetico e una notevole sensibilità alle variazioni di temperatura ambientale e alle fluttuazioni di corrente elettrica. Inoltre il peso dello scanner è molto elevato. 1.2.2. Sistema dei gradienti di campo magnetico Il sistema di gradienti ha lo scopo di aggiungere al campo magnetico statico un campo magnetico variabile, crescente in modo lineare nelle tre direzioni dello spazio, cosicché a ciascun voxel corrisponda costantemente una frequenza caratteristica di risonanza e, quindi, di emissione. I gradienti di campo vengono generati e opportunamente attivati dalle bobine resistive, allocate nel tunnel del magnete principale, e introducono variazioni di fase e di frequenza nel moto degli spin, consentendo la codificazione spaziale del segnale di risonanza proveniente dai singoli voxel, ordinati per righe e colonne. Ciascun gradiente è generato da una coppia di bobine, di varia forma, disposte una di fronte all’altra, in ciascuna delle quali circola corrente con 14 direzione opposta. Nello spazio compreso tra le bobine si genera così un gradiente magnetico. Per ottenere prestazioni ottimali i gradienti magnetici devono avere alcuni parametri fondamentali: -­‐‑
la potenza, espressa in milliTesla per metro (almeno 10 mT/m); -­‐‑
la velocità di salita, espressa in millisecondi (meno di 1 ms per raggiungere la massima intensità richiesta per ciascun impulso); -­‐‑
il duty-­‐‑cycle, che indica la crescita percentuale di un gradiente fino alla massima potenza; -­‐‑
slew-­‐‑rate, che indica il rapporto fra la massima potenza e tempo necessario al raggiungimento di 100 per cento del duty-­‐‑cycle ed è espresso in mT/m/ms. Il vero cuore di un sistema per immagini con Risonanza Magnetica è costituito dal sottosistema dei gradienti, dalle cui prestazioni dipendono le prestazioni dell’intero sistema. 1.2.3. Bobine per gli impulsi RF Le bobine per gli impulsi RF sono i componenti di un tomografo RM necessari a trasmettere l'ʹenergia d'ʹeccitazione ai nuclei in esame, deviandoli dal loro stato d'ʹequilibrio allineato al campo magnetico principale (B0). Agiscono in coordinazione con il sistema dei gradienti e sono delle vere e proprie antenne che cedono energia alla frequenza di risonanza agli spin nucleari (trasmissione) e rivelano il segnale di FID (ricezione). Potenzialmente ogni bobina può sia trasmettere sia ricevere i segnali RF, ma nei tomografi RM di nuova generazione il compito di trasmissione del segnale è affidato ad una bobina che è posta fissa all’interno del gantry del magnete ed ha il compito di inviare gli impulsi RF prodotti dal generatore 15 di forma d’onda e amplificati dall’amplificatore di potenza. Questa bobina è chiamata Body Coil ed è spesso utilizzata sia come emittente sia come ricevente per lo studio di volumi ampi come il distretto addominale e toracico. Le bobine di ricezione possono avere grandezza e morfologia variabili in relazione al distretto corporeo d’interesse. In generale, esse possono essere suddivise in tre categorie: le bobine convenzionali (di volume e di superficie), le bobine in quadratura e le phased-­‐‑array. Le bobine convenzionali hanno la forma di un cilindro cavo, all’interno del quale deve essere posto il volume oggetto di studio. Esse ricevono il segnale RM dall’intero volume in esame in maniera direttamente proporzionale a quanto sono riempite. Le bobine di superficie invece ricevono il segnale solo da strutture superficiali contigue con un decadimento quadratico del segnale all’aumentare della distanza. Possono essere di diversa tipologia: piatte, circolari, avvolgenti o endocavitarie. Le bobine di quadratura, che possono essere, analogamente a quelle convenzionali, di volume o di superficie, permettono l’acquisizione simultanea della fase negativa e positiva del segnale RM mediante due canali di ricezione sfasati di 90° con un sensibile aumento del rapporto segnale-­‐‑rumore. Infine le bobine di ricezione phased-­‐‑array sono costituite da più antenne di superficie poste in parallelo fra loro. Ciascuna riceve indipendentemente i segnali RF provenienti dal proprio settore di pertinenza ed esaminati in successione con un ritardo prestabilito. Le informazioni ricevute da ogni singola bobina sono successivamente elaborate e sommate alle altre in modo tale da ottenere un’unica immagine globale. L’immagine ottenuta è caratterizzata da un buon rapporto segnale-­‐‑rumore nonostante un FOV 16 molto ampio. Oggi sono comunemente utilizzate le bobine phased-­‐‑array che sfruttano i vantaggi sia delle bobine in quadratura (migliore rapporto segnale-­‐‑rumore) sia delle bobine di superficie (miglior dettaglio). È importante sottolineare che qualunque sia il tipo di magnete impiegato, è necessario provvedere ad una adeguata schermatura dello stesso. In qualsiasi edificio esiste una notevole quantità di materiali ferromagnetici che, se situati in prossimità del tomografo RM, possono provocare distorsioni del campo, degradando considerevolmente la qualità dell’immagine ottenibile. Dal l’altro lato, il campo magnetico generato dal magnete può interferire con il funzionamento di apparecchiature elettriche, meccaniche ed elettroniche poste nell’ambiente circostante, nonché creare situazioni di potenziale pericolo per chi si trovi a circolare in prossimità della stanza ove l’apparecchiatura è installata. La schermatura è realizzata mediante una gabbia di Faraday che racchiude la sala magnete. Una sua buona tenuta si riflette sui parametri propri dell’immagine. Fig. 4 -­‐‑ Struttura della sala magnete e della gabbia di Faraday 17 1.2.4. Il computer Il computer costituisce la parte centrale del sistema RM e controlla, tramite apposite interfacce, tutte le operazioni eseguite. Il computer organizza tutte le fasi dell’esame e i successivi passaggi, quali sintonizzazione delle bobine, digitalizzazione dei segnali analogici ricevuti, effettuazione della Trasformata di Fourier, ricostruzione e visualizzazione delle immagini. Dopo il magnete rappresenta l’elemento di maggior costo dell’intero sistema. Necessita di grande potenza di calcolo e di grande capacità di memoria. Provvede infatti, dopo amplificazione, campionamento e conversione analogico-­‐‑digitale del segnale ricevuto, a presentare l’immagine in scala di grigi sul video-­‐‑monitor e ad archiviare i dati numerici nella memoria centrale; può infine elaborare i dati numerici immagazzinati nella memoria centrale (postprocessing dell’immagine). Una componente essenziale del computer è costituita dall’array processor appositamente progettato per il trattamento dei dati grezzi mediante Trasformata di Fourier. Per incrementare l’efficienza dell’apparecchiatura, sono spesso presenti due console separate: una destinata alla gestione delle operazioni di esecuzione dell’esame, l’altra dedicata alla presentazione ed elaborazione delle immagini per la diagnosi. 1.3. Grandezze fisiche e unità di misura Mentre i campi elettrici sono associati alla presenza di cariche, i campi magnetici sono la manifestazione dell’interazione tra cariche elettriche in movimento (corrente elettrica). Anche i campi magnetici possono esercitare forze fisiche sulle cariche elettriche, ma soltanto quando tali cariche sono in movimento. Un campo magnetico può essere rappresentato come un 18 vettore e può essere espresso in due modi: come induzione magnetica B o come intensità di campo magnetico H. B ed H sono espressi rispettivamente in tesla (T) e in ampere al metro (A m-­‐‑1 ). Nel vuoto, e con buona approssimazione nell’aria, B e H sono collegati dalla relazione: ( 1 ) B = µ 0 H La costante di proporzionalità µ 0 è chiamata permeabilità magnetica nel -7
vuoto ed ha come valore numerico 4π ×10 ed è espresso in henry al metro (H m-­‐‑1). Quindi, per descrivere un campo magnetico in aria, o in materiali non magnetici (compresi i materiali biologici), è sufficiente specificare soltanto una delle grandezze fisiche B o H. L’intensità della forza F che agisce su una carica elettrica q che si muove con una velocità v in una direzione perpendicolare a un’induzione magnetica B è data dall’espressione: ( 2 ) F = q(v × B) La direzione della forza (forza di Lorentz) è determinata dal prodotto vettoriale della velocità della carica per l’induzione magnetica ed è perciò sempre perpendicolare alla direzione del moto della carica elettrica. Di conseguenza, l’interazione di un campo magnetico con una carica elettrica produrrà un cambiamento di direzione del moto della carica, ma mai un cambiamento di velocità. I campi magnetici statici non depositano energia nei tessuti. L’induzione magnetica, misurata in tesla (T), viene accettata come la più appropriata quantità da collegare agli effetti dei campi magnetici. Il flusso d’induzione magnetica attraverso una determinata superficie è uguale al prodotto dell’area di quest’ultima per la componente del vettore induzione magnetica normale alla superficie stessa. 19 Nella Tabella I vengono riassunte le grandezze fisiche relative ai campi magnetici e le loro unità di misura. Grandezza Corrente Simbolo I Unità ampere (A) Densità di corrente J Intensità di campo magnetico Flusso magnetico H ampere al metro quadrato (A m-­‐‑2) ampere al metro (A m-­‐‑1) Φ weber (Wb o Tm2) B tesla (T) µ henry al metro (H m-­‐‑1). µ 0 4π ×10 -7 Induzione magnetica Permeabilità Permeabilità dello spazio libero Tabella I – Grandezze fisiche relative ai campi magnetici 20 CAPITOLO 2 Analisi dei rischi sanitari in Risonanza Magnetica Lo sviluppo clinico della Risonanza Magnetica è piuttosto recente, in Italia solo dagli anni ’80 è iniziata l’installazione in massa nei presidi ospedalieri. Nonostante la RM non presenti emissione di radiazioni ionizzanti al pari di altre metodiche di diagnostica per immagini, è necessario tener conto dei rischi connessi ad altri aspetti fisici, campo magnetico statico, campi magnetici variabili nel tempo e i campi elettromagnetici a radiofrequenza. Inoltre ci sono anche rischi legati alla struttura dello scanner RM, quali l’introduzione in sala magnete di oggetti metallici e l’utilizzo di liquidi criogeni per il raffreddamento dei magneti superconduttivi, oppure, per il paziente, rischi dovuti allo svolgimento dell’indagine RM, come l’elevato rumore acustico durante l’esame e l’utilizzo di mezzi di contrasto. Nei seguenti capitoli verranno descritti i principali rischi a cui sono sottoposti i lavoratori operanti in sala magnete, quali Tecnici Sanitari di Radiologia Medica (TSRM), Medici Radiologi, Infermieri Professionali, Ausiliari Socio-­‐‑Sanitari (ASS) e Fisici Medici. 2.1. Campo Magnetico Statico Un impianto RM per uso clinico e di ricerca genera un campo magnetico statico che può variare da 100 mT a più di 10 T. Questi valori sono superiori a quelli del campo magnetico statico terrestre che varia da 30 a 70 µμT. Nella moltitudine di elementi presenti in natura si può effettuare una prima 21 e grossolana distinzione che individua tre categorie: quelli (la maggior parte) che sono totalmente indifferenti all'ʹazione di un campo magnetico (diamagnetiche), quelli che manifestano comportamenti magnetici in presenza di un opportuno campo e quelli in cui il comportamento magnetico si riscontra anche in assenza di campo. Le sostanze che hanno comportamento diamagnetico sono, nell'ʹesperienza comune, "ʺnon magnetiche"ʺ come l'ʹacqua, la maggior parte delle sostanze organiche (DNA, oli, plastiche) e alcuni metalli come il mercurio, l'ʹoro, il rame, l'ʹargento ed il bismuto. Tutti i materiali che non sono caratterizzati da una magnetizzazione permanente possono essere classificati tramite la suscettività. La suscettività magnetica χ viene definita come rapporto tra: χ=
( M
H 3 ) dove: -­‐‑
M è la magnetizzazione del campione di materiale; -­‐‑
H è il campo magnetico a cui il materiale è sottoposto. Essa è una grandezza adimensionale ed indica il grado di magnetizzazione di un materiale posto in un campo magnetico H esterno di una data ampiezza. Per sostanze diamagnetiche la suscettività assume valori molto piccoli ed è di segno negativo, in quanto la magnetizzazione stessa di tali materiali è negativa. La suscettività della maggior parte dei tessuti umani è compresa tra −7.0 ·∙ 10−6 e −11.0 ·∙ 10−6. I campi magnetici statici possono avere diversi tipi di effetti che possono rivelarsi potenziali cause di rischio sanitario: effetti diretti (dovuti ad interazione del campo magnetico con il sistema biologico), ed effetti 22 indiretti dovuti alle forze che si esercitano su vari tipi di oggetti, impianti e dispositivi presenti nel corpo del paziente o localizzati nelle vicinanze del magnete. Gli effetti diretti si possono dividere in due categorie: -­‐‑
Effetti a livello molecolare e cellulare Sono riconducibili all’orientamento di sistemi molecolari e ai moti di traslazione indotti dal campo su molecole diamagnetiche, paramagnetiche e ferromagnetiche. Sistemi molecolari diamagnetici, come il DNA, i bastoncelli della retina e i globuli rossi falciformi, sono dotati di suscettività magnetica anisotropa e tendono ad allinearsi lungo la direzione del campo statico, contrastati però dall’agitazione termica. Tali effetti di orientamento potrebbero teoricamente indurre cambiamenti patologici ma questi rimangono al di sotto del limite di rilevanza. -­‐‑
Interazioni elettrodinamiche Il campo magnetico statico interagisce, mediante la forza di Lorentz, con i flussi elettrolitici generando correnti indotte e, per effetto di Hall, differenze di potenziale. L’interazione di campo magnetico statico con cariche in movimento può indurre nell’uomo alterazioni su parametri fisiologici quali la conduzione nervosa, i potenziali e le correnti indotte associate al flusso sanguigno, e sul flusso sanguigno stesso. Sulla base delle conoscenze attuali è opinione diffusa che l’esposizione ai campi magnetici statici non comporti un rischio sanitario per livelli di induzione magnetica fino a 2 T. Per quanto riguarda invece gli effetti indiretti della presenza di un elevato campo magnetico statico bisogna tener conto delle interazione 23 magnetomeccaniche con gli oggetti ferromagnetici sia esterni (come forbici, bisturi, bombole di ossigeno e barelle) che interni al corpo umano. Gli oggetti metallici se posti nelle vicinanze del magnete, possono acquisire velocità tale da diventare dei veri e propri proiettili e costituire un pericolo non solo per i pazienti, ma anche per gli operatori sanitari presenti nella sala. L’elevato campo magnetico statico interagisce inoltre con gli oggetti metallici posti all’interno del corpo umano, quali impianti e le protesi. Essi possono traslare e/o ruotare e provocare un eccessivo riscaldamento ai tessuti circostanti. L’entità di questi effetti indesiderati è data dal tipo del metallo, dal tipo di impianto e dalla zona dove è posto. I pazienti portatori di pacemaker hanno un’assoluta controindicazione all’esame RM. Per prevenire gli incidenti è necessario informare il personale dei rischi, esporre una segnaletica opportuna, far compilare ai pazienti un questionario adeguato ed effettuare un’ulteriore verifica con il metal detector prima di far entrare il paziente in sala magnete. 2.2. Campo Magnetico variabile nel tempo Oltre al campo magnetico statico ogni tomografo a RM usa i campi magnetici variabili nel tempo per le codifiche spaziali (di fase e di frequenza) che possono variare tra 6-­‐‑8 mT/m fino a 30-­‐‑40 mT/m e oltre. I rischi connessi all’esposizione a tali campi generati dalle bobine di gradiente interessano principalmente i pazienti o i volontari che stazionano nella sala magnete durante l’esame. La grandezza usata per indicare i limiti di esposizione è dB/dt . Essa indica quanto varia l’intensità del campo magnetico dalla situazione in cui i gradienti sono spenti a quando sono accessi e viceversa. 24 Le limitazioni sull’esposizione ai campi magnetici variabili nel tempo sono basate sugli effetti delle correnti indotte sulle membrane delle cellule del sistema nervoso centrale e dei muscoli. Infatti nervi, muscoli e vasi sanguigni si comportano come dei conduttori e in presenza di un campo magnetico variabile nel tempo si avranno quindi delle correnti indotte in accordo con la legge di Faraday. Le correnti elettriche indotte dai campi magnetici variabili nel tempo nei tessuti possono dare luogo principalmente a due tipi di effetti: 1) la stimolazione dei tessuti eccitabili muscolari e nervosi 2) il riscaldamento dei tessuti Il primo, per i valori tipici di dB/dt, sovrasta il secondo di tipo termico, che risulta essere trascurabile. Gli effetti di stimolazione possono cominciare a verificarsi per densità di corrente superiore a 100 mA/m2. Per valori di densità di corrente superiori a 1 A/m2 nella regione cardiaca potrebbe insorgere la fibrillazione ventricolare. È noto che elevati valori di dB/dt, come ad esempio nelle tecniche di fast imaging (Echo Planar Imaging), possono causare la stimolazione di nervi periferici o l’apparizione di effetti luminosi sulla retina. 2.3. Campi a Radio Frequenza Gli impulsi a Radio Frequenza (RF) sono utilizzati in ogni tomografo a RM e servono a generare il segnale che verrà misurato durante ogni scansione. Solo una piccola parte dell’energia a RF trasmessa viene assorbita dai nuclei di idrogeno: la maggior parte è assorbita con altri meccanismi e dissipata sotto forma di calore. Il riscaldamento dei tessuti è dovuto principalmente alle correnti indotte nel corpo del paziente ed è quindi maggiore sulla superficie corporea. Se il sistema di regolazione termica del paziente non è in grado di dissipare il calore prodotto la temperatura corporea si innalzerà. 25 La grandezza dosimetrica che meglio riesce a quantificare l’assorbimento di energia elettromagnetica nei tessuti è il SAR (Specific Absorption Rate). Il SAR rappresenta la potenza assorbita per unità di massa di tessuto (Watt/kg). Se la massa rappresenta la massa dell’intero corpo si parla di SAR mediato sul corpo intero (WBSAR), che fornisce informazioni generali sul sovraccarico complessivo cui è sottoposto il sistema termoregolatore. Per la distribuzione del SAR nelle varie parti del corpo è più indicato pesare in base alla densità, conducibilità e il valore massimo del campo elettrico. Il SAR è una variabile complessa che dipende dalla frequenza di risonanza, dal tipo e dal numero di impulsi RF, dall’angolo di ribaltamento, dal tempo di ripetizione TR, dal tipo di bobina RF utilizzata, dal volume del tessuto contenuto nella bobina, dalla configurazione della regione anatomica, dall’orientamento del corpo. Alcuni organi, come gli occhi e le gonadi, per le loro caratteristiche fisiche, sia termiche che elettriche, hanno ridotte capacità di dissipare il calore. Pertanto costituiscono siti in cui potenzialmente si verificano più facilmente effetti dannosi. Per evitare in parte il riscaldamento dei tessuti è necessario che le condizioni ambientali della sala magnete siano adeguate ed in particolare la temperatura non deve superare i 22°C e l’umidità non deve essere al di sopra il 50%. La normativa italiana fissa i valori massimi per l’esposizione ai campi RF: il SAR al corpo intero può essere tale da innalzare la temperatura del paziente al massimo di 0,5°C. In alcuni casi, previa la valutazione del medico, è consentito un innalzamento di 1°C. 26 CAPITOLO 3 Il regolamento di sicurezza in RM L’esposizione dei lavoratori al campo magnetico statico è degna di attenzione soprattutto per quanto riguarda il tempo dedicato all’operazione di posizionamento del paziente. Praticamente tutte le apparecchiature hanno i comandi per l’azionamento del lettino posizionati sul frontale della macchina, dove il campo è comunque non trascurabile. Ciò comporta un’esposizione sicuramente non irrilevante, agli arti e al corpo e quindi la necessità da parte dell’Esperto Responsabile di una valutazione finalizzata al rispetto di quanto sancito nei limiti previsti dalla legislazione vigente in materia di limiti di esposizione dei lavoratori: in particolare sulla base delle apparecchiature presenti e delle procedure operative e organizzative del servizio RM e, soprattutto, l’Esperto Responsabile deve indicare quale sia il massimo carico di lavoro che un operatore addetto al posizionamento dei pazienti in sala RM possa sostenere. Mediamente per il posizionamento di ogni paziente sono richiesti, da parte dell’operatore, dai tre ai cinque minuti. Tale operazione è svolta dal addetto con il corpo intero in una zona con campo magnetico che varia a seconda del tipo di apparecchiatura. Durante tale operazione le mani dell’operatore stazionano per circa un minuto alla pulsantiera del lettino, anche in questo caso a campo magnetico variabile a seconda del sistema. Buona prassi è quella di segnalare con delle strisce adesive a terra le zone dove il valore del campo magnetico raggiunge 200 mT e dare istruzioni al personale per minimizzarne la presenza all’interno, individuando il carico di lavoro massimo compatibile con il rispetto dei limiti di esposizione 27 specificati nella tabella III. Il datore di lavoro, sulla base degli atti propri del Medico Responsabile del sito e dell’Esperto Responsabile della sicurezza deve garantire: -­‐‑
la formalizzazione di un elenco relativo al personale autorizzato ad accedere, ovvero ad operare, all’interno del sito RM -­‐‑
la sorveglianza medica per tutto il personale in elenco, alla quale deve fare riscontro il giudizio di idoneità personale e specifico rilasciato dal medico competente, che deve essere rinnovato con periodicità annuale -­‐‑
il rispetto di procedure specifiche per le varie fasi del processo diagnostico che siano compatibili con il regolamento di sicurezza -­‐‑
l’emanazione di un regolamento di sicurezza che individui per tutte le categorie di soggetti coinvolti in un idoneo protocollo comportamentale -­‐‑
la formazione/informazione, anche ai sensi degli articoli 21 e 22 del d.lgs. 626/94 e s.m.i. e da ripetersi con una periodicità stabilita opportunamente sulla base di specifiche esigenze. 3.1. Riferimenti normativi italiani In Italia, le apparecchiature a RMN per uso medico o di ricerca sono regolate da una specifica normativa che prevede la messa in sicurezza dell'ʹimpianto ed idonee misure protezionistiche per gli operatori ed i pazienti. Nella Tabella II sono riportati i riferimenti normativi, gli articoli attualmente vigenti e quelli abrogati: Decreti Articoli e allegati vigenti Articoli abrogati D.M. 29/11/85 -­‐‑ tutti gli articoli D.M. 02/08/91 articolo 7 e allegati da 1 e 6 D.M. 03/08/93 articoli 2, 4, 5 ed allegati A e B D.P.R. 542/94 tutti gli articoli 28 1 e 3 -­‐‑ Tabella II 1,2,3,4,5 e 6 Esistono, inoltre sentenze della Corte Costituzionale interpretative delle norme. Nel regolamento emanato con il D.P.R. 542/94 sono individuate e classificate in gruppi le apparecchiature diagnostiche a RMN che devono essere autorizzate da parte del Ministero o della Regione e quelle che non necessitano di autorizzazione per l’installazione e l’uso. I diversi regimi autorizzativi dipendono dal valore del campo statico di induzione magnetica dell’apparecchiatura e dalla possibilità di eseguire esami diagnostici sull’intero corpo o sui soli arti. Alcuni tipi di apparecchiature RM, in particolare quelle ad alto campo magnetico statico (tra 2 e 4 Tesla), sono autorizzate all’installazione ed all’uso dal Ministero della Salute, mentre invece le RM con più basso campo magnetico (fino a 2 Tesla) sono soggette ad autorizzazione Regionale. Il DPR 542/94 oltre ad identificare un Medico Responsabile del presidio nel suo complesso, prevede le figure del Medico Responsabile dell’attività dell’impianto (aspetti medici) e dell’Esperto Responsabile della sicurezza dell’impianto (aspetti fisici). La figura del Medico Responsabile dell’impianto è sempre richiesta mentre quella dell’Esperto Responsabile della Sicurezza è obbligatoria per le apparecchiature che necessitano di autorizzazione. I compiti del Medico Responsabile dell’impianto e dell’Esperto Responsabile della Sicurezza sono riportati negli allegati del DM 02/08/91. La protezione e sorveglianza delle persone esposte comprende la stesura, da parte dell’Esperto Responsabile in collaborazione con il Medico Responsabile, di un Regolamento di sicurezza che dovrà contenere anche le indicazioni di tutti i casi di possibile controindicazione all’analisi RMN e/o all’esposizione al campo magnetico statico, ai campi elettromagnetici lentamente variabili e ai campi a radiofrequenza generati durante il funzionamento dell’apparecchiatura nonché i potenziali rischi derivanti 29 dall’uso. Si prevede poi che il sito ospitante l’apparecchiatura RM comprenda due aree: -­‐‑
Zona ad accesso controllato. Area nella quale i valori misurati di campo magnetico disperso sono pari o superiori a 0,5 mT. Includono in pratica la sala magnete, soprattutto nel caso di apparecchiature che generano campi di limitata intensità, ma possono estendersi oltre. Le linee isomagnetiche a 0,5 mT devono essere comunque comprese all’interno dei locali ed aree di proprietà del presidio stesso. -­‐‑
Zona di rispetto. Area nella quale i valori misurati di campo magnetico disperso sono compresi tra 0,1 e 0,5 mT. Sono abitualmente rilevabili in locali accessori del sito. La norma impone comunque che le linee isomagnetiche a 0,1 mT siano contenute all’interno del comprensorio del presidio. Alla zona ad accesso controllato è interdetto in assoluto l’accesso a portatori di stimolatori cardiaci. Detta zona deve essere delimitata da barriere fisiche atte ad impedire l’ingresso accidentale di persone non autorizzate. Va apposta opportuna segnaletica indicante la presenza di campo magnetico, con chiara esplicitazione delle categorie di persone per le quali è vietato o controindicato l’ingresso, ed il divieto di introduzione di materiale ferromagnetico. 3.2. Limiti di esposizione dei lavoratori La Normativa vigente prevede dei limiti di esposizione per gli operatori che prestano costante servizio in presenza di intenso campo magnetico disperso, al fine di garantire la riduzione del rischio. Tali limiti sono regolamentati dal D.M.02/08/1991 (allegati 1 e 4) [1]: esso pone dei limiti 30 superiori sulla durata massima dell’esposizione giornaliera in base all’intensità del campo magnetico B e alla parte del corpo esposta (corpo intero o arti). In particolare: Parte esposta Intensità del Durata massima campo magnetico dell’esposizione disperso [T] giornaliera Corpo intero 0,2 1 ora Corpo intero 2 15 min Arti 2 1 ora Arti 4 15 min Tabella III Laddove possibile, è buona norma che l’esposizione non sia continuativa, ma frazionata, alternandosi con i colleghi nelle mansioni che possono comportare l’esposizione. Per evitare esposizioni indebite sia al paziente che al personale operante nel sito, nell’applicazione della risonanza magnetica meritano una particolare attenzione i seguenti aspetti: -­‐‑
Gli esami con RM in vivo dovrebbero essere effettuati solo quando vi è un potenziale vantaggio clinico per il paziente. -­‐‑
Si dovrebbe eseguire una valutazione dei rischi e dei benefici dell’esame con risonanza magnetica. -­‐‑
Si dovrebbe tenere conto dei vantaggi e degli svantaggi della risonanza magnetica rispetto ad altre tecniche diagnostiche. -­‐‑
Nel caso in cui gli esami con risonanza magnetica facciano parte di un progetto di ricerca, questo deve essere guidato da principi etici; si dovrebbe ottenere il consenso informato del paziente. -­‐‑
Gli utilizzatori di dispositivi a risonanza magnetica devono essere adeguatamente addestrati sui principi e sull’impiego degli apparati, 31 sulle indicazioni e controindicazioni per l’uso, sulla necessità di mantenere dei registri, sugli aspetti di sicurezza e sulle precauzioni. -­‐‑
I produttori dovrebbero fornire una documentazione completa sui livelli di esposizione dei pazienti relativamente ai loro apparati, e queste linee guida di sicurezza dovrebbero essere da loro tenute in considerazione nella progettazione dell’apparecchio e nella sua collocazione, in modo tale che i livelli di esposizioni ai campi magnetici ed elettromagnetici siano entro i limiti raccomandati per i pazienti. 3.3. Linee guida internazionali sui limiti di esposizione a CMS I vari Paesi stabiliscono le proprie normative nazionali di esposizione ai campi elettromagnetici. Comunque, la maggior parte di questi standard nazionali si basa sulle linee guida emanate dall'ʹICNIRP (International Commission on Non-­‐‑Ionizing Radiation Protection). Questa organizzazione non governativa, ufficialmente riconosciuta dall'ʹOrganizzazione Mondiale della Sanità (OMS), valuta i risultati scientifici di tutto il mondo. Basandosi su una approfondita revisione della letteratura, l'ʹICNIRP produce delle linee guida che raccomandano dei limiti di esposizione. Queste linee guida vengono riviste periodicamente ed aggiornate quando necessario. Un limite normativo non rappresenta una demarcazione precisa tra sicurezza e rischio. Non esiste un singolo valore sopra il quale l'ʹesposizione diventa pericolosa per la salute; invece, il potenziale rischio per la salute umana aumenta gradualmente con i livelli di esposizione più alti. Le normative indicano che, secondo le conoscenze scientifiche, sotto un certo valore di soglia l'ʹesposizione ai campi elettromagnetici è sicura. Sono stati condotti numerosi studi sui potenziali effetti biologici dei campi magnetici statici, analizzando diversi parametri tra cui l’orientamento delle 32 cellule, la crescita cellulare, l’attività metabolica e l’espressione genica. Nel complesso, questi studi non forniscono evidenze convincenti di effetti nocivi per esposizioni a campi magnetici con densità di flusso fino a diversi tesla. Studi di laboratorio su animali indicano risposte di avversione al campo, e tendenza ad evitarlo, per intensità di circa 4 T o più; si pensa che tali risposte abbiano origine nel vestibolo. Campi superiori a circa 0,1 T inducono potenziali di flusso specialmente nel cuore e attorno ad esso, nonché in altri grossi vasi sanguigni, ma la loro rilevanza sanitaria non è chiara, né si sono osservati effetti sulle funzioni cardiovascolari, sullo sviluppo fetale, sulla cancerogenesi e su altri parametri, in conseguenza di esposizioni fino a 8 T. Negli studi di laboratorio sull’uomo non si sono osservati effetti notevoli sui parametri fisiologici, per esposizioni a campi magnetici fino a 8 T. Vi è qualche indicazione di effetti sulla coordinazione tra occhi e mani e sulla sensibilità al contrasto visivo. Campi superiori a 2-­‐‑3 T possono provocare effetti sensoriali temporanei come nausea, vertigini, gusto metallico e fosfeni, durante il movimento degli occhi o della testa; la sensibilità varia da individuo a individuo e gli effetti si possono minimizzare o eliminare muovendosi lentamente attraverso il campo. Vi sono pochi dati epidemiologici su effetti sanitari a lungo termine in persone esposte a campi statici, e non c’è nessuno studio su gruppi a esposizione potenzialmente alta, come gli operatori addetti a risonanza magnetica. Ulteriori dettagli possono trovarsi in: “Guidelines on limits of exposure to static magnetic fields. Health Physics 96(4): 504-­‐‑514; 2009.” In quanto al nostro paese, facente parte dell’Unione Europea, è necessario considerare anche la legislazione Europea. Il 26 giugno 2013 è stata pubblicata la Direttiva 2013/35/UE del Parlamento europeo e del Consiglio 33 sulle disposizioni minime di sicurezza e di salute relative all’esposizione dei lavoratori ai rischi derivanti dagli agenti fisici (campi elettromagnetici). Fa riferimento alla Direttiva “generale” 89/391/CEE sulla salute e la sicurezza nei luoghi di lavoro e abroga la direttiva 2004/40/CE. La direttiva è stata approvata il 20 giugno dal Consiglio dei ministri dell’occupazione e delle politiche sociali dell’Unione Europea e pubblicata in Gazzetta Europea L 179 del 29 giugno 2013. La Direttiva stabilisce prescrizioni minime di protezione dei lavoratori contro i rischi riguardanti gli effetti biofisici diretti e gli effetti indiretti noti, provocati a breve termine dai campi elettromagnetici. Nel testo, inoltre, sono presenti nuovi criteri in merito a: -­‐‑
VLE (valori limite di esposizione), “valori stabiliti sulla base di considerazioni biofisiche e biologiche, in particolare gli effetti diretti acuti e a breve termine scientificamente accertati, ossia gli effetti termici e l’elettrostimolazione dei tessuti”; -­‐‑
VLE relativi agli effetti sanitari, “VLE al di sopra dei quali i lavoratori potrebbero essere soggetti a effetti nocivi per la salute, quali il riscaldamento termico o la stimolazione del tessuto nervoso o muscolare”; -­‐‑
VLE relativi agli effetti sensoriali, “VLE al di sopra dei quali i lavoratori potrebbero essere soggetti a disturbi temporanei delle percezioni sensoriali e a modifiche minori delle funzioni cerebrali”. Gli Stati membri dovranno conformarsi alle disposizioni di tale Direttiva entro il 1 luglio 2016. Per quanto riguarda la normativa italiana, è attualmente vigente la normativa del Titolo VIII, capo IV del DLgs. 81/08 relativa agli agenti fisici (il rumore, gli ultrasuoni, gli infrasuoni, le vibrazioni meccaniche, i campi elettromagnetici, le radiazioni ottiche ecc). 34 CAPITOLO 4 Obiettivo della Tesi L’obiettivo principale di questo lavoro di tesi è quello di misurare la reale esposizione ai campi magnetici statici del personale operante nel sito RM durante il turno di lavoro al fine di controllare il rispetto dei limiti previsti dal D.M.02/08/1991. Su tale necessità verrà sviluppato e realizzato un dispositivo di rilevazione ad hoc impiegando componentistica certificata e con adeguate caratteristiche tecnologiche che al contempo soddisfino le necessita di spending review della pubblica amministrazione. Il contesto macro economico impone di prestare la massima attenzione ai costi e alle reali necessità, il progetto tiene conto di questi aspetti e si propone come un apparecchio utile, semplice da usare e dal costo produttivo sostenibile. Lo strumento permetterà di rilevare in ogni istante il valore di campo magnetico al quale l’operatore si trova esposto nella stanza RM. I dati saranno memorizzati su un supporto interno di memoria e potranno essere scaricati a fine turno su un calcolatore per la successiva elaborazione. Il dispositivo, di piccole dimensioni per poter essere indossato dall’operatore, dovrà essere compatibile con l’ambiente di RM. Inoltre verrà sviluppato un software per la gestione, elaborazione e l’archiviazione dei dati. Infine, si studierà la stabilità e l’uniformità del sistema di rilevazione personale e si analizzeranno i dati ricavati da una settimana di controllo continuo sul personale tecnico. 35 CAPITOLO 5 Materiali e Metodi Dalla necessità di effettuare delle valutazioni di cui al precedente capitolo ha origine l’idea dell’implementazione di un modulo capace di effettuare la trasduzione dell’induzione del campo magnetico in grandezze elettriche ed effettuarne la conversione analogico/digitale. Oltre a queste funzioni base si aggiunge il fatto che il modulo deve essere in grado di salvare un numero elevato di campioni, e che questi possano essere facilmente consultabili a fine giornata lavorativa. Il dispositivo hardware che meglio risponde alle esigenze richieste è la piattaforma open-­‐‑source microcontrollore ATmel Arduino, sulla ATmega328P: quale esso è fornisce montato un convertitori analogico/digitali integrati a 10 bit di risoluzione, numerose periferiche programmabili e porte di I/O tramite le quali è possibile dialogare con periferiche esterne, come la scheda di memoria SD dedicata al salvataggio dei dati e un display LCD su cui visualizzare informazioni utili. Arduino integra inoltre la possibilità di collegarsi ad un PC tramite porta USB, e questo permette di rendere facilmente disponibili i dati campionati dal microcontrollore. La scelta dei sensori ha portato ad un prodotto della Allegro Microsystems, precisamente al modello A1301 e A1302. Infine si è deciso di utilizzare una shield per leggere la scheda di memoria SD su Arduino, un modulo di sviluppo e prototipazione open-­‐‑source basato su microcontrollore, per la presenza di un apposito slot per la scheda di memoria e per la semplicità di programmazione. 36 5.1. Arduino Il nome Arduino deriva dal nome di un bar di Ivrea (che richiama a sua volta il nome di Arduino d'ʹIvrea, primo re d'ʹItalia dal 1002 al 1014) frequentato da alcuni dei fondatori del progetto. Arduino è una piattaforma open-­‐‑source, basata su risorse hardware e software flessibili e di facile utilizzo. Pertanto tutte le informazioni sull'ʹhardware e i progetti relativi sono reperibili in rete in modo che ognuno possa creare la propria copia o una versione modificata in base alle esigenze. É pensata per gli utenti con poca esperienza nel mondo di elettronica e di programmazione, infatti, grazie alla ricca documentazione e alle numerose librerie permette di prendere confidenza con questi strumenti con estrema facilità; il tutto è reso ancora più agevole dai costi molto accessibili e dalla licenza open-­‐‑source. Fig. 5 -­‐‑ Scheda Arduino UNO Per l'ʹapplicazione descritta in questa tesi è stato utilizzato Arduino UNO. La scheda monta un microcontrollore (MCU -­‐‑ MicroController Unit) ATmel ATmega328. È il nucleo centrale di tutto il sistema ed ha una velocità di 16MHz, una memoria flash da 32KB per la programmazione, una SRAM da 2KB e una memoria EEPROM da 1KB. Specifiche tecniche: 37 Microcontrollore: ATmega328 Numero di Input/Output digitali: 14 (di cui 6 output PWM) Numero di Input Analogici: 6 Memoria: 32KB; 2KB SRAM; 1KB EEPROM Velocità di Clock: 16MHz Link alla pagina ufficiale: http://arduino.cc/en/Main/ArduinoBoardUno
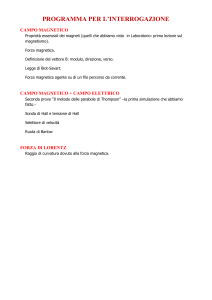
La scheda possiede 14 pin digitali programmabili di input/output e 6 input per l’acquisizione ed elaborazione di segnali analogici. È presente inoltre un altro chip AtMega16U2, programmato come convertitore USB-­‐‑Seriale. Grazie a questo chip l’Arduino connesso ad un computer tramite USB può essere immediatamente riconosciuto come periferica senza configurazioni particolari. La scheda funziona con una tensione in ingresso di 5V che può essere fornita o direttamente dalla connessione USB o tramite un connettore per l’alimentazione diretta con una tensione in ingresso che può arrivare fino a 9V. In caso siano collegati sia il cavo USB sia il connettore di alimentazione, la scheda è capace di scegliere automaticamente la fonte di alimentazione esterna. Arduino si può estendere attraverso le cosiddette “shield”, schede plug-­‐‑in aggiuntive che si possono montare sui pin della scheda principale per ampliarne le funzionalità. All’hardware presente sulla scheda viene affiancato un ambiente di sviluppo integrato (IDE -­‐‑ Integrated Development Envinronment) multipiattaforma, che rende possibile la scrittura di programmi (più correttamente firmware) in maniera facilitata grazie all’uso di una vasta collezione di librerie. (Figura 6) 38 Fig. 6 -­‐‑ Interfaccia con cui sviluppare il software per Arduino Il linguaggio di programmazione per questo ambiente di sviluppo viene chiamato Wiring, ed è una derivazione dei più famosi C e C++. 5.2. Descrizione hardware La soluzione prevista per questo progetto consiste nella realizzazione di un dispositivo con le schede applicative plug-­‐‑in, note come “shields” Arduino, dove viene implementato un programma capace di fornire tutte le caratteristiche necessarie al modulo datalogger. L’hardware che verrà presentato è l’insieme dei componenti utilizzati nella realizzazione del modulo che provvede a soddisfare le esigenze sopracitate; lo schema a blocchi è rappresentato in Figura 7. 39 Fig. 7 -­‐‑ Schema a blocchi Le funzionalità della piattaforma si possono estendere in maniera semplice grazie all’utilizzo delle “shield”, moduli compatibili con il modello di Arduino UNO. Così come Arduino, le “shield“ sono hardware open source e possono essere utilizzate in contemporanea sulla stessa scheda, impilandone una sull’altra, detto in gergo “a panettone”. Per il nostro prototipo abbiamo bisogno dei seguenti componenti: -­‐
Scheda Arduino UNO -­‐
1 monitor LCD 16x2 -­‐
1 sensore di campo magnetico ad effetto Hall -­‐
2 diodi a led (uno rosso ed uno verde) -­‐
1 LCD shield -­‐
1 Datalogging shield by Adafruit -­‐
Pila a 9V -­‐
Cavi di collegamento Per quanto riguarda le dimensioni fisiche del nostro rilevatore personale la massima lunghezza, compreso tutto il modulo e l’estensione per la pila di 40 alimentazione, è di 11cm mentre l’altezza può variare in base a quali e quante “shield” decidiamo di lasciare. Considerando che il dispositivo debba essere pratico e di dimensioni portabili con un peso adeguato, abbiamo deciso di togliere la LCD shield nel progetto finale. In quanto per l’operatore non è indispensabile sapere il valore istantaneo del campo magnetico statico, ma la misura dell’esposizione totale giornaliera e/o mensile. Riduciamo di conseguenza l’altezza del dispositivo a 3,4cm. Di seguito la descrizione in breve dei componenti principali: -­‐
LCD shield: permette ad un scheda Arduino di visualizzare informazioni su un display LCD con scritta bianca e retroilluminazione blu. Grazie alla presenza dei 5 pulsanti è possibile implementare progetti con menù di controllo visualizzati sul display LCD e la cui gestione avviene tramite la pressione dei 5 pulsanti, ciascuno dei quali numerato da 1 a 5. A completare la dotazione della scheda sono presenti un trimmer per la regolazione del contrasto del display ed un pulsante per il reset della scheda Arduino sottostante. La scheda è completa dei connettori ufficiali per shield Arduino, in modo da rendere possibile l’accesso ai rimanenti segnali Arduino non utilizzati da questa shield. Per le misurazioni sperimentali la scelta è quasi obbligata su questa shield per la necessita di visualizzare le risposte nel tempo reale del sensore di campo magnetico. -­‐
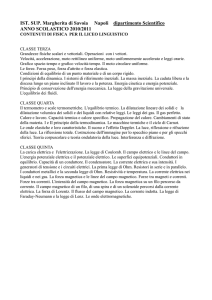
Sensore di campo magnetico: Un aspetto fondamentale è la rilevazione vera e propria del campo. Per poter misurare il campo magnetico statico serve un sensore ad effetto Hall. Un campo magnetico causa una deviazione dal loro percorso degli elettroni, determinando una differenza di potenziale in un conduttore, questo effetto è chiamato effetto Hall. Il sensore riporta un valore di 41 tensione proporzionale al campo magnetico. La scelta cade su un prodotto della Allegro MicroSystems, sensore lineare A1301 o A1302 ad effetto Hall. Essi sono ottimizzati per fornire con precisione una tensione di uscita proporzionale al campo magnetico applicato. Se non è applicato nessun campo magnetico, il sensore darà il valore 2,5V in uscita, assumendo che la tensione d’ingresso è di 5V. Il valore oscillerà tra 0V e 5V secondo la polarità magnetica, con una velocita di 2,5 mV/Gauss per A1301, e 1,3 mV/Gauss per sensore A1302. La risoluzione massima del sensore A1302 risulta maggiore, per tale motivo si è scelto di effettuare le misurazioni sperimentali con quest’ultimo. Prima di misurare direttamente il campo magnetico, è necessario trovare la tensione d’uscita del trasduttore quando non è vicino al magnete in modo da calibrare la misurazione.1 Utilizzeremo il valore ottenuto (NOFIELD) per compensare il valore in uscita durante la misurazione in presenza di magnete (raw). La compensazione è effettuata applicando la semplice formula: ( 4 ) compensated = raw − NOFIELD Leggeremo il valore in uscita utilizzando uno degli ingressi analogici di Arduino e la funzione analogRead(). Tale funzione restituisce un valore tra 0 (0V) e 1023(5V) ovvero 0,0049V per ogni incremento. La formula per convertire i valori(units) della funzione analogRead() in Gauss è quindi: G=
0, 0049 •compensated
= 3, 77•compensated 0, 0013
1 Vedere lo sketch nel listato n°3 “Test sensore” in appendice 42 ( 5 ) Per comodità i valori in Gauss verranno trasformati in milliTesla. 10 Gauss = 1 mTesla. Fig. 8 – Sensore ad effetto Hall A1302 -­‐
Datalogging shield: con un’unica shield si integra sia il circuito RTC (Real Time Clock) sia la scrittura su SD card, risparmiando una shield che incide in termini di dimensioni del prodotto finale. L’Adafruit ha inoltre predisposto una piccola parte formata da basetta millefori in cui si possono collegare componenti esterni come i sensori, i diodi a led e le resistenze risparmiando anche la protoshield. In quanto la datalogging ha sia la componente RTC sia quella SD Card che possono essere utilizzate separatamente, il primo test da effettuare è su entrambe le componenti in modo da verificare il loro funzionamento indipendentemente l’una dall’altra. 2
Le schede di memoria Secure Digital, o SD, sono nate per consentire a una serie di dispositivi di avere a disposizione delle memorie intercambiabili, permanenti e a basso costo. È importante notare che 2 Vedere lo sketch nel listato n°1 “Test e configurazione RTC” e listato n°2 “Test Scheda SD” in appendice 43 le memorie Flash, così come la memoria di programma del nostro Arduino, hanno un numero limitato di cicli di cancellazione/scrittura e non sono quindi da considerare come qualcosa da usare in modo permanente. Fig. 9 -­‐ Datalogging shield di Adafruit L’interfaccia per SD card funziona con schede formattate con file system FAT16 e FAT32 e un apposito circuito traslatore previene i danni alla scheda. Per quanto riguarda la componente RTC , essa consente di avere un orologio preciso di sistema, sgravando la CPU dal calcolo e dalla gestione dei dati orari e liberando spazio nella memoria di programma. -­‐
Diodi a led: la scelta di usare due diodi led, uno rosso e uno verde, è apparsa necessaria nel momento in cui si è deciso di monitorare la scrittura sulla scheda di memoria. Led rosso si accende ogni volta 44 che si effettua la scrittura sulla scheda (ogni secondo). Led verde indica il buon funzionamento della scheda di memoria. 5.3. Descrizione software 5.3.1. Ambiente di sviluppo Arduino Abbiamo a disposizione una piattaforma di sviluppo (nome tecnico: IDE, Integrated Development Environment) che permette di scrivere il codice attraverso il quale verranno impartite al microcontrollore gli “ordini” da eseguire e le risposte da fornire ad un dato stimolo dell’ambiente. Arduino nasce dal progetto Wiring e di quel progetto non solo ha preso “in prestito” gli intenti ma anche gli strumenti, in particolare il software dell’IDE, che è, nella sua forma attuale, una derivazione diretta dell’IDE di Wiring. È un'ʹapplicazione sviluppata in Java, derivante da quella creata per il linguaggio di programmazione Processing. L'ʹIDE è anche multipiattaforma infatti, può essere utilizzato su Windows, Linus e Mac OS-­‐‑X. Questo ambiente di sviluppo è stato concepito per utilizzatori a digiuno dallo sviluppo software quindi semplice ed intuitivo. Per semplificare la stesura del codice, l’editor di testo, incluso all’interno dell’IDE, integra il controllo delle parentesi, la formattazione automatica e il syntax highlighting, il quale visualizza il testo con differenti colori e font in base alle regole sintattiche del linguaggio di programmazione. Grazie a questo editor è possibile inoltre compilare ed eseguire il programma creato, senza l’utilizzo della riga di comando o di programmi esterni. L’ambiente di sviluppo include una libreria scritta in C che rende molto semplice l’implementazione delle operazioni input/output. All’utente, infatti, viene richiesto di definire due sole funzioni, una chiamata setup() che stabilisce quali sono le funzioni dei pin utilizzati dal 45 “dispositivo interattivo” e l’altra, chiamata loop(), che invece contiene i veri e propri “comandi” e verrà eseguita in continuazione dal microcontrollore. Per la realizzazione del nostro progetto è stata utilizzata la versione 1.6.3 dell’ambiente di sviluppo. Fig. 10 – Menu principale dell’ambiente di sviluppo Arduino 1.6.3 I bottoni presenti nella barra degli strumenti da sinistra a destra, illustrati in figura 10, offrono un rapido accesso alle operazioni di base, quali: -­‐
Verifica: compila il programma per la verifica degli errori; -­‐
Carica: compila e carica il programma sulla scheda Arduino; -­‐
Nuovo: apre un nuovo file vuoto; -­‐
Apri: apre un file esistente; -­‐
Salva: salva il file corrente; -­‐
Monitor seriale: apre una schermata della porta seriale (un tool che viene usato per leggere in diretta i dati che Arduino invia tramite seriale, se è programmato per farlo); 46 5.3.2. Librerie utilizzate Sul sito ufficiale di Arduino è presente una utile reference3 che raccoglie tutte le strutture, le variabili, le costanti e le funzioni che si possono utilizzare per programmare la scheda di prototipazione. Per ciascuna di esse sono presenti esempi di implementazione. Il software di Arduino include inoltre una serie di Librerie che permettono di estendere rapidamente il codice e forniscono funzionalità aggiuntive rapidamente implementabili. Dal menu di Arduino si può selezionare una delle librerie che verrà aggiunta in automatico allo sketch aperto con un comando del tipo #include <nomelibreria.h>.
Le librerie già incluse nel software di Arduino permettono di sfruttare alcune funzioni specifiche del microcontrollore (ad esempio la memorizzazione di dati nella EEPROM) o forniscono il set di comandi necessari ad interfacciare Arduino con una delle shield ufficiali. Di seguito verranno analizzate le librerie impiegate nella realizzazione del software per il dispositivo di rilevazione. Una caratteristica indispensabile per il progetto è la possibilità di espandere Arduino tramite l’uso di shield. La maggior parte di queste schede aggiuntive sono però progettate per compiere una funzione specifica, non programmabile. Esistono alcuni metodi che permettono di comunicare con altri dispositivi utilizzando come canale di trasmissione dati i protocolli seriali (I2C, SPI o RS 232). Questo rende possibile demandare ad una scheda slave funzioni di elaborazione laboriose, che non si vogliono far eseguire alla scheda master. La Libreria Wire dispone di tutte le funzioni necessarie alla realizzazione Master-­‐‑Slave tra due schede Arduino. Essa nasce proprio per la gestione di 3 http://arduino.cc/en/Reference/HomePage 47 tutti quei dispositivi elettronici che sono stati sviluppati con la tecnologia I2C per comunicare su due soli fili con altri dispositivi digitali. Lo scopo è quello di ridurre la complessità del cablaggio per il collegamento fra dispositivi digitali e, nello specifico, fra dispositivi master come un microcontrollore, e dispositivi slave come sensori di pressione, memorie EE-­‐‑
PROM, sensori di campi magnetici, orologi in tempo reale e molto altro. La libreria permette di far assumere ad Arduino il ruolo di Master o Slave, di stabilire la comunicazione per il trasferimento di dati e di gestire il flusso della comunicazione stessa. Questa libreria eredita alcune funzioni dalle altre librerie che gestiscono flussi dati in lettura e scrittura, sono state modificate le istruzioni di lettura e scrittura che cambiano da send e receive a write e read. Il numero di bit gestiti per gli indirizzi dalla libreria sono sette, con l’ottavo che è utilizzato per definire se l’operazione è in lettura o scrittura. Nel caso lo sketch usi indirizzi con l’ottavo bit valorizzato, questo sarà scaricato dalla libreria. Per il progetto abbiamo l’esigenza di avere un dispositivo che permette di tenere traccia del tempo e della data, poiché a fine turno di lavoro è richiesto il recupero delle informazioni raccolte. Avere un circuito che garantisca, anche in mancanza di alimentazione, un riferimento temporale sicuro è fondamentale. Il modulo utilizzato è RTC basato sull’integrato DS1307. Le sue caratteristiche tecniche sono le seguenti Caratteristiche Conteggio in secondi, minuti, ore, giorno della settimana, giorno del mese, mese, anno. Interfaccia Bus I2C RAM 56 byte aggiuntivi di memoria utente Tabella IV – Caratteristiche tecniche DS1307 48 La libreria RTClib, sviluppata da JeeLab, permette di rilevare ed impostare la data e l’ora attuale del RTC.
Un’altra libreria importante è la Libreria SPI: SPI sta per Serial Peripheral Interface ed è un protocollo seriale sincrono, utilizzato dai microcontrollori per comunicare rapidamente con uno o più dispositivi periferici a breve distanza. Può anche essere utilizzato per la comunicazione tra due microcontrollori. Per questa applicazione la libreria SPI serve a far comunicare il microcontrollore con la scheda SD, e verrà utilizzato dalla libreria SD quindi non direttamente nel codice. La Libreria SD definisce due classi diverse, ciascuna delle quali mette a disposizione delle funzioni dedicate ai due principali aspetti dell’interazione con la memoria, ovvero la classe SD per accedere alla scheda e manipolare i suoi file e le cartelle e la classe File dedicata alla lettura e alla scrittura dei dati all’interno di un file. Il fatto che le due classi siano separate permette di operare nel modo corretto, usando la classe SD per aprire uno o più file e la classe File per operare su ciascuno di essi. Il limite da tener presente: la libreria può gestire un solo file aperto alla volta. L’ultima è la Libreria LiquidCrystal, già presente tra le librerie standard, consente ad Arduino di controllare il display LCD. La libreria prevede la creazione di un’istanza della classe LiquidCrystal, specificando anche i pin digitali di Arduino seguendo uno ordine preciso, ma flessibile, per consentire di cablare il display nel modo più comodo ed efficace. 5.3.3. Presentazione codice In questo paragrafo verrà fatta la breve descrizione del codice scritto4 per Arduino, in modo da poter comprendere i passaggi logici delle funzioni basi del nostro prototipo. 4 Vedere lo sketch nel listato n°4 in appendice 49 Funzione setup(), come detto nel capitolo 5.3.1., è una funzione che viene invocata una volta all’avvio della scheda Arduino, per questo motivo all’interno di questa funzione vengono impostati i pinMode e inizializzata la comunicazione seriale. All’accensione del dispositivo si ha il bisogno di alcuni controlli preliminari, quali verifica del funzionamento del RTC e inizializzazione della scheda SD. Quest’ultimo serve a far capire all’utente, tramite il led verde lampeggiante, se persiste un problema con la lettura e/o scrittura della scheda SD, può semplicemente indicare il mancato inserimento della scheda di memoria nell’apposito slot. Nella funzione loop(), che verrà chiamata ripetutamente, si legge ogni secondo il campo magnetico statico dai sensori, richiamando la funzione analogRead() sul pin A1 per il sensore A1301 e sul pin A2 per il sensore A1302. Vengono poi adattati i dati di lettura tramite calcoli, descritti nel paragrafo 5.2. Infinte dopo ogni lettura, i dati vengono scritti su di un file chiamato “cms.txt”, richiamando la funzione SD.open(“cms.txt”, FILE_WRITE). 5.4. Sito di risonanza magnetica nel reparto di Neuroradiologia all’Ospedale Maggiore Policlinico di Milano Il cuore del sito RM è costituito da più sale magnete in cui sono posizionati i sistemi RM. In ambito ospedaliero, il sito RM non coincide con le sale magnete in cui si trovano i tomografi RM ma è costituito da diversi locali necessari sia per la preparazione del paziente e per la gestione delle emergenze sia per il funzionamento stesso dei sistemi RM e per l’effettivo svolgimento dell’esame (Figura. 8). 50 Fig. 11-­‐‑ Sito di RM dell'ʹOspedale Maggiore Policlinico di Milano. Padiglione Monteggia. Tutto il sito è considerato “Zona ad accesso controllato” e al suo interno sono previsti: -­‐‑
la sala comandi in cui si trovano le consolle RM -­‐‑
le sale magnete -­‐‑
i locali tecnici -­‐‑
gli spogliatoi e i locali WC -­‐‑
gli studi refertazione -­‐‑
studio funzionale -­‐‑
deposito All’interno della “Zona ad accesso controllato” solo la sala magnete ed il locale tecnico risultano interessati da campi magnetici dispersi superiori a 0,5 mT (5 Gauss). Tutti gli altri locali sono interessati da campi con intensità inferiore a 0,5 mT ma, in alcune zone, superiori a 0,1 mT, pertanto sono da considerarsi “Zona di rispetto”. La sala d’attesa e l’accettazione amministrativa, sono invece previsti al di fuori della “Zona ad accesso controllato” per garantire la massima sicurezza nella gestione dei pazienti e degli eventuali accompagnatori. 51 Il personale che opera nel sito RM è costituito da diverse figure professionali: Tecnici Sanitari di Radiologia Medica (TSRM), Medici Radiologi, Infermieri Professionali, Ausiliari Socio-­‐‑Sanitari (ASS) e Fisici Medici. I sistemi RM-­‐‑Imaging presenti nel sito dell’Ospedale Maggiore Policlinico nel reparto di Neuroradiologia e illustrati in Figura 8 sono un Philips ACHIEVA da 1,5 Tesla (15.000 Gauss) Nova dual e un Philips ACHIEVA a 3,0 Tesla X-­‐‑series. Tutti e due i sistemi hanno il magnete superconduttivo ed è pertanto presente un sistema di refrigeramento ad elio liquido. Analizzando le linee isomagnetiche, in aria libera, relative ai campi magnetici statici dispersi, nelle zone circostanti l’installazione si hanno le situazioni di seguito descritte. Sul piano orizzontale: la curva isomagnetica di 0,5 mT, in aria libera, è completamente contenuta nella Zona ad accesso controllato. La zona esterna con cui confina longitudinalmente la sala magnete è da considerarsi di terrapieno. Sul piano verticale: non sussistono problemi per la zona sottostante poiché la sala magnete giace su terrapieno. L’area sovrastante è attualmente occupata da depositi. Poiché, in aria libera, tali locali risulterebbero interessati da campi magnetici dispersi dell’ordine di 0,1 mT, è stata provvista la messa in opera di una schermatura passiva in corrispondenza del soffitto della sala magnete. 5.5. Misurazione all’operatore Nel nostro lavoro con l’ausilio del prototipo costruito è stato possibile misurare i valori di intensità di campo ai quali sono sottoposti gli operatori sanitari che svolgono il loro turno lavorativo in risonanza magnetica durante l’esecuzione di diverse tipologie di esami, nello specifico encefalo e 52 rachide lombo-­‐‑sacrale. Prima di tutto, al fine di validare i risultati del monitoraggio sugli operatori, si sono effettuate misure ripetute di campo magnetico in posizioni fisse e si è valutata la stabilità e l’uniformità della risposta del prototipo. È importante che l’apparecchio risponda in modo coerente ad un fissato valore di campo magnetico: se ciò non si dovesse verificare questo sarebbe indice di un malfunzionamento del sensore ad effetto Hall. Per l’analisi della stabilità e dell’uniformità della risposta del sistema, si sono inizialmente effettuate misure ripetute del campo magnetico statico in 4 posizioni fisse nella sala magnete da 1,5 T. Ci siamo limitati alla sala magnete da 1,5T in quanto al momento delle misure sperimentali sulla macchina da 3T veniva effettuata la manutenzione in seguito al quench. Unità di rilevazione una volta posta in posizione, ha monitorato il campo magnetico per un tempo pari a 30 secondi, sufficiente a registrare 30 valori: di questi si è considerato il valore medio. Questa procedura è stata ripetuta per cinque volte ottenendo quindi cinque valori medi di campo magnetico in ogni posizione. Da questi si è calcolato il campo magnetico medio Bm sui cinque set di misure. Nella Tabella V sono riportati i risultati ottenuti: A150, B120, C100 e D55 sono rispettivamente le posizioni a 150 cm, 120 cm, 100 cm e 55 cm dal gantry sul lettino della Philips ACHIEVA da 1,5 Tesla. A150 B120 C100 D55 [mT] [mT] [mT] [mT] 1 7,5 19,5 37,47 174,71 2 7,5 19,87 38,99 175,02 3 7,88 20,62 39,59 177,28 53 4 7,84 19,87 38,32 179,09 5 7,88 20,22 38,63 178,02 Tabella V -­‐‑ Misure di campo magnetico 1,5 T
Per garantire la ripetibilità del posizionamento, è stato utilizzato un semplice metro da sarto. Il prototipo è stato posizionato in piano, sul lettino del sistema RM, utilizzando come riferimento la bobina head ed il laser per la centratura presente sul tomografo. Fig. 12 -­‐ Posizionamento rilevatore Con il termine uniformità della risposta si indica la capacità di un sistema di dare la medesima risposta per una serie di stimoli equivalenti. Per verificare questa caratteristica si è calcolata la media dei valori di campo magnetico registrati reiteratamente alla stessa distanza Bm e si è ricavato lo scarto percentuale dalla media del valore minimo misurato e di quello massimo (Tabella VI). 54 W min =
(Bm-Bmin )•100
Bm
( 6 ) W max =
(B max− Bm)•100
Bm
( 7 ) Bm [mT] Bmin [mT] Wmin [%] Bmax [mT] Wmax [%] ERσ [%] A150 7,72 7,1 2,84 7,88 2,07 0,18 B120 20,01 19 2,57 19,87 3,01 0,37 C100 38,60 37 3,88 39,75 2,97 0,74 D55 178,73 166,5 7,40 186,75 3,85 2,36 Tabella VI Dalla Tabella VI risulta che l’uniformità della risposta del dispositivo è verificata entro il 8% del campo magnetico misurato. Lo scarto percentuale aumenta molto nella posizione D55, in quanto il campo magnetico statico è decisamente più alto, il dispositivo viene maggiormente attirato dal magnete e pertanto ogni minimo movimento del dispositivo equivale a un importante scostamento di misura. Per valutare la stabilità, e quindi quantificare la variazione nel tempo della risposta di un sistema al medesimo stimolo, si è considerata la deviazione standard σ e il relativo valore medio Bm, e si è ricavato l’errore relativo ERσ percentuale corrispondente ad ogni valore di campo magnetico. Esso risulta sempre minore al 3% della misura. Dopo queste valutazioni preliminari si è proceduto con l’analisi dell’esposizione al campo magnetico statico degli operatori durante la pratica clinica. I tipi di esami che si è scelto di monitorare sono: RM encefalo e RM rachide 55 lombo-­‐‑sacrale. Per comodità dell’operatore, tutto il modulo è stato racchiuso dentro una scatola di plastica di spessore di 0,2 cm circa, in modo da evitare di impigliarsi dentro la tasca della divisa e di danneggiare il circuito. Per verificare se la scatola alteri la rilevazione del campo magnetico da parte del sensore sono state effettuate delle misure nelle modalità simili a quelle descritte nella verifica di stabilità e dell’uniformità, ma con il modulo chiuso. Le misure hanno dimostrato un decremento del campo di induzione del 3,5% rispetto alle letture effettuate a circuito aperto. In ogni caso secondo la formula n°5 descritta nel paragrafo 5.2. si evince che il valore massimo ottenibile dal sensore ad effetto Hall A1302 è di 1911,39 Gauss, valore che corrisponde a 191,13 mT. Valore decisamente basso per un campo magnetico di 1,5 T. Tuttavia osservando la tabella VI si nota che neppure alla distanza di 55 cm dal gantry, distanza verosimilmente attribuibile alla posizione del operatore durante la centratura del paziente, si arriva al valore di saturazione. Pertanto si è deciso, cautelativamente, di attribuire il valore massimo del campo magnetico statico (1500 mT) nel caso dovesse capitare di ottenere il valore di 191,13 mT. Perché ciò significherebbe che il sensore si è avvicinato al gantry fino a saturazione ed è pertanto giusto considerare che l’operatore in quel caso sia stato esposto all’intensità di campo magnetico superiore a 200 mT. 56 CAPITOLO 6 Risultati Nella tabella VII sono riportate le misure dei tempi medi di permanenza (s) degli operatori per varie tipologie di attività, ricavati dai dati delle misurazioni effettuate nei 5 giorni lavorativi. Tipo di attività Encefalo Rachide LS Posizionamento 90 s 60 s Centratura 6 s 15 s Dimissione 45 s 30 s Totale 141 s 105 s Tabella VII -­‐ Tempi medi di permanenza nella sala RM Si nota chiaramente come siano variabili i valori dei tempi di esposizione durante l’esecuzione degli esami. Considerando i limiti di legge già citati sopra, la durata massima dell’esposizione ad un campo magnetico >200 mT è di 1 ora al giorno. Ipotizziamo un numero di esami pari a 20 esami al dì otteniamo un tempo di esposizione di 3 minuti/esame, tempi effettivamente prossimi a quelli reali necessari al posizionamento del paziente. Nelle Figure 13, 14, 15 e 16 Sono illustrati i grafici dell’andamento del campo magnetico in funzione del tempo per ciascuna attività monitorata. Confrontando i due grafici di posizionamento paziente per esame RM Encefalo e Rachide LS si evince che il tempo necessario per l’esame Encefalo è maggiore, questo è dovuto al cambio bobina head e il posizionamento del 57 paziente. I picchi massimi però sono inferiori, nei primi 40 secondi caratterizzano i movimenti dell’operatore nella sala RM durante il cambio bobina, dal cinquantesimo secondo circa l’operatore si avvicina notevolmente al gantry per posizionare il paziente e centrare la bobina con il laser luminoso. Fig. 13 -­‐ Esposizione durante posizionamento del paziente per esame di encefalo Fig. 14 -­‐ Esposizione durante posizionamento del paziente per esame di rachide LS 58 Fig. 15 -­‐ Esposizione durante dimissione del paziente dopo un esame encefalo Fig. 16 -­‐ Esposizione durante dimissione del paziente dopo un esame rachide LS Come mostrano i grafici durante l’esecuzione degli esami il TSRM è sottoposto a forze di campo variabili e dipendenti da fattori poco costanti. La distanza e la posizione che l’operatore occupa all’interno della sala magnete, e il tempo di permanenza in essa, dipendono dal tipo di paziente (collaborante, deambulante, claustrofobico, ansioso ecc.), dal tipo 59 di esame da eseguire e dalle conoscenze del paziente inerenti all’esame. Per questi motivi le misure sopra indicate sono riferite ad esami effettuati su pazienti “ideali”, pertanto i tempi e l’esposizione al campo magnetico statico possono variare se effettuate in altre condizioni. 60 CAPITOLO 7 Conclusioni Dal mio punto di vista il prototipo del dosimetro personale così sviluppato non è un punto di arrivo ma fornisce una base efficace per sviluppare e progettare un apparecchio ulteriormente perfezionato. È infatti ancora possibile migliorare il progetto partendo innanzitutto dalla sostituzione del sensore A1302 con uno più sensibile a campi magnetici statici elevati. Risolto il problema del fondo scala si può implementare nuove funzionalità al framework, come ad esempio la connessione Wi-­‐‑Fi, introducendo così l’oggetto nell’ambiente di Internet Of Things. Un ulteriore possibile sviluppo potrebbe prevedere di aggiungere altri due sensori ad effetto Hall a 90° nelle direzioni cartesiane ed associare eventualmente un giroscopio per semplificare la misura, ricavando l’esatta posizione dell’operatore nella sala magnete. L’assemblaggio fisico ha richiesto una notevole quantità di tempo, per diverse ragioni: prima fra tutte, l’affacciarsi a un nuovo mondo di elettronica immerso in quello di elettromagnetismo. Nonostante numerosi imprevisti, una volta entrati nell’ottica corretta e avendo un’adeguata visione d’insieme si riesce a gestire tutti i dettagli. Questo progetto ha permesso di monitorare l’esposizione degli operatori al campo magnetico statico, mediante un controllo continuo durante la giornata lavorativa. Il primo passo è stato studiare la stabilità e l’uniformità della risposta del sensore. Il dispositivo ha una stabilità superiore al 98% nel range tra 100 mT – 1500 mT e l’uniformità risulta migliore del 92%. I risultati delle prove condotte sugli operatori durante l’esecuzione degli 61 esami clinici hanno evidenziato che gli operatori, quando si trovano all’interno della sala magnete, trascorrono la maggior parte del tempo in punti della sala caratterizzati da bassi valori di campo magnetico, rispettando di conseguenza i limiti di esposizione al campo magnetico statico contenuti negli allegati 1 e 4 del D.M. 02/08/91. Nonostante ciò è importante adottare delle manovre che possono ridurre ulteriormente l’esposizione del personale tecnico al campo magnetico statico. La prima strategia da attuare è quella di permanere all’interno della sala magnete minor tempo possibile svolgendo fuori dalla sala magnete tutte le operazioni che non necessitano della presenza del paziente all’interno della sala, e quindi anche dell’operatore. All’interno della sala magnete il tecnico dovrebbe mantenere la maggiore distanza possibile dal magnete, compatibilmente con le attività da svolgere. Ultimo accorgimento, ma non meno importante, tutte le operazioni di centratura del paziente e di posizionamento delle bobine possono essere effettuate distendendo al massimo le braccia in modo da allontanare la testa e il tronco dal centro del magnete, risparmiando l’esposizione di quest’ultime a scapito degli arti. Osservando questi piccoli accorgimenti, che dovrebbero far parte delle abitudini quotidiane di tutti i tecnici di radiologia che svolgono la loro attività nella diagnostica di risonanza magnetica, si otterrebbe un importante risparmio di esposizione. 62 Ringraziamenti Nel concludere il mio percorso di formazione accademica il mio pensiero va a tutti coloro che – in modi e misure diverse – lo hanno reso possibile, sostenendomi in ogni momento. È doveroso da parte mia ringraziare il Prof. Biffi, per avermi dato la possibilità di affrontare un progetto stimolante e per avermi indicato sempre la giusta soluzione ai problemi che si sono presentati. Ringrazio tutti i tecnici di radiologia, infermieri e dottori, per la loro preziosa collaborazione e la costante pazienza durante tutto il periodo di tesi. Un grazie speciale è destinato a mio marito Massimo, perché mi è sempre stato vicino, aiutandomi e confortandomi nei momenti difficili. Infine ringrazio tutta la mia famiglia, per il sostegno morale durante questi tre anni. 63 Bibliografia (sitografia) [1] Cei, L. (2011). Tecniche di Tomografia Computerizzata e di Risonanza Magnetica. Roma: Società Editrice Universo. [2] http://www.cis.rit.edu/htbooks/mri/inside.htm [3] Gruppo di lavoro in Risonanza Magnetica. (2004). Raccomandazioni per l’assicurazione della qualità in risonanza magnetica. Report AIFM N°2. [4] http://www.chrisruckman.com/ancfaq2.htm [5] http://www.ispesl.it/linee_guida/comparto_o_settore/2009LG-­‐‑RdS-­‐‑
RM.pdf [6] Decreto Ministeriale 02/08/91, Autorizzazione all’installazione e all’uso di apparecchiature diagnostiche a risonanza magnetica (http://www.gazzettaufficiale.it/) [7] Mazzucato, F. (2009). ANATOMIA RADIOLOGICA Tecniche e metodologie in radiodiagnostica (Terza edizione ed., Vol. 3). Padova: PICCIN. [8] Campurra, G. (2008). Il rischio da campi elettromagnetici negli ambienti di lavoro. (Testo unico sicurezza del lavoro). [9] Vanzulli, A., & Torricelli , P. (2013). Manuale di RM per TSRM. Vermezzo, Milano: POLETTO EDITORE srl. [10] Michele Menniti (2014) Arduino e le tecniche di programmazione dei microcontrollori ATMEL. Progettazione e realizzazione di circuiti in stand-­‐‑
alone. Futura Group srl. [11] Mazzoldi, P., Nigro, M., Voci, C. (2005). Elementi di Fisica – Elettromagnetismo – II edizione. Napoli: Edises s.r.l. [12] http://www.icnirp.org/en/publications/index.html [13] Farrag, S.I.: “A Numerical Computational Method of MRI Static Magnetic Field for an Ergonomic Facility Design Guidelines” (Biomed. Eng. Dept., Modern Univ. for Technol. & Inf., Cairo, Egypt) [14] Philip Chadwick: “Assessment of electromagnetic fields around magnetic resonance imaging (MRI) equipment.” (2007, London)
64 Appendice /* *** versione 0.8 Ardu1 con LCD *** *** by rickysax e mvictoria *** ** 6 luglio 2015 ** ***** Test e configurazione della Real Time Clock **** */ // Date and time functions using a DS1307 RTC connected via I2C and Wire lib #include <Wire.h> #include "ʺRTClib.h"ʺ RTC_DS1307 RTC; void setup () { Serial.begin(9600); Wire.begin(); RTC.begin(); if (! RTC.isrunning()) { Serial.println("ʺRTC is NOT running!"ʺ); // following line sets the RTC to the date & time this sketch was compiled // uncomment it & upload to set the time, date and start run the RTC! //RTC.adjust(DateTime(__DATE__, __TIME__)); } } void loop () { DateTime now = RTC.now(); Serial.print(now.year(), DEC); Serial.print('ʹ/'ʹ); Serial.print(now.month(), DEC); Serial.print('ʹ/'ʹ); Serial.print(now.day(), DEC); Serial.print('ʹ 'ʹ); Serial.print(now.hour(), DEC); Serial.print('ʹ:'ʹ); Serial.print(now.minute(), DEC); Serial.print('ʹ:'ʹ); Serial.print(now.second(), DEC); Serial.println(); Serial.print("ʺ since 1970 = "ʺ); Serial.print(now.unixtime()); Serial.print("ʺs = "ʺ); Serial.print(now.unixtime() / 86400L); 65 Serial.println("ʺd"ʺ); // calculate a date which is 7 days and 30 seconds into the future DateTime future (now.unixtime() + 7 * 86400L + 30); Serial.print("ʺ now + 7d + 30s: "ʺ); Serial.print(future.year(), DEC); Serial.print('ʹ/'ʹ); Serial.print(future.month(), DEC); Serial.print('ʹ/'ʹ); Serial.print(future.day(), DEC); Serial.print('ʹ 'ʹ); Serial.print(future.hour(), DEC); Serial.print('ʹ:'ʹ); Serial.print(future.minute(), DEC); Serial.print('ʹ:'ʹ); Serial.print(future.second(), DEC); Serial.println(); Serial.println(); delay(3000); } Listing 1 /* *** versione 0.8 Ardu1 con LCD *** *** by rickysax e mvictoria *** ** 7 luglio 2015 ** **** test SD card Adafruit SD shield **** */ #include <SD.h> #include <SPI.h> // set up variables using the SD utility library functions: Sd2Card card; SdVolume volume; SdFile root; // Adafruit SD shields and modules: pin 10 const int chipSelect = 10; void setup() { // Open serial communications and wait for port to open: Serial.begin(9600); while (!Serial) { ; // wait for serial port to connect. Needed for Leonardo only } 66 Serial.print("ʺ\nInitializing SD card..."ʺ); pinMode(10, OUTPUT); // change this to 53 on a mega // we'ʹll use the initialization code from the utility libraries // since we'ʹre just testing if the card is working! if (!card.init(SPI_HALF_SPEED, chipSelect)) { Serial.println("ʺinitialization failed. Things to check:"ʺ); Serial.println("ʺ* is a card is inserted?"ʺ); Serial.println("ʺ* Is your wiring correct?"ʺ); Serial.println("ʺ* did you change the chipSelect pin to match your shield or module?"ʺ); return; } else { Serial.println("ʺWiring is correct and a card is present."ʺ); } // print the type of card Serial.print("ʺ\nCard type: "ʺ); switch (card.type()) { case SD_CARD_TYPE_SD1: Serial.println("ʺSD1"ʺ); break; case SD_CARD_TYPE_SD2: Serial.println("ʺSD2"ʺ); break; case SD_CARD_TYPE_SDHC: Serial.println("ʺSDHC"ʺ); break; default: Serial.println("ʺUnknown"ʺ); } // Now we will try to open the 'ʹvolume'ʹ/'ʹpartition'ʹ -­‐‑ it should be FAT16 or FAT32 if (!volume.init(card)) { Serial.println("ʺCould not find FAT16/FAT32 partition.\nMake sure you'ʹve formatted the card"ʺ); return; } // print the type and size of the first FAT-­‐‑type volume uint32_t volumesize; Serial.print("ʺ\nVolume type is FAT"ʺ); Serial.println(volume.fatType(), DEC); Serial.println(); volumesize = volume.blocksPerCluster(); // clusters are collections of blocks volumesize *= volume.clusterCount(); // we'ʹll have a lot of clusters volumesize *= 512; // SD card blocks are always 512 bytes Serial.print("ʺVolume size (bytes): "ʺ); 67 Serial.println(volumesize); Serial.print("ʺVolume size (Kbytes): "ʺ); volumesize /= 1024; Serial.println(volumesize); Serial.print("ʺVolume size (Mbytes): "ʺ); volumesize /= 1024; Serial.println(volumesize); Serial.println("ʺ\nFiles found on the card (name, date and size in bytes): "ʺ); root.openRoot(volume); // list all files in the card with date and size root.ls(LS_R | LS_DATE | LS_SIZE); } void loop(void) { } Listing 2 /* *** versione 0.8 Ardu1 con LCD *** *** by rickysax e mvictoria *** * 6 luglio 2015 * * test +2 sensori +condensatore sensore * * +resistenza di pulldown sensore 2 * */ void setup() { //Init Seriale Serial.begin(9600); } void loop() { delay(500); int val_ADC = analogRead(1); //invio il dato acquisito al pc Serial.print("ʺSensore 1: "ʺ); Serial.println(val_ADC); int val_ADC2 = analogRead(2); //invio il dato acquisito al pc Serial.print("ʺSensore 2: "ʺ); Serial.println(val_ADC2); } Listing 3 /* *** versione 1.4 Ardu1 compatibile con LCD *** *** by rickysax e mvictoria *** * 2 ottobre 2015 * * salvataggio automatico in continuo su SD * * +2led +2 sensori +condensatore sensore * * +resistenza di pulldown sensore 2 * * +pulsanti configurati tipo press any key * 68 * per cambiare su display le letture dei 2sensori * */ #include <LiquidCrystal.h> #include <Wire.h> #include "ʺRTClib.h"ʺ #include <SPI.h> #include <SD.h> LiquidCrystal lcd(7, 6, 5, 4, 3, 2); //def. la RTC e imposto il nome file RTC_DS1307 RTC; File myfile; // #define NOFIELD 505L // Analog output with no applied field, calibrate this // Uncomment one of the lines below according to device in use A1301 or A1302 // This is used to convert the analog voltage reading to milliGauss #define MILLIGAUSS 1953L // For A1301: 2.5mV = 1Gauss, and 1024 analog steps = 5V, so 1 step = 1953mG #define MILLIGAUSS2 3756L // For A1302: 1.3mV = 1Gauss, and 1024 analog steps = 5V, so 1 step = 3756mG int corrcms = 505; int corrcms2 = 516; int inputPin = A0; // buttons array analog input uint16_t inputValue = 0; // value read from buttons array void setup() { pinMode(13, OUTPUT); //13 Led rosso errore scrittura SD pinMode (1, OUTPUT); //1 Led verde SD funziona Serial.begin(9600); lcd.begin(16, 2); lcd.setCursor(0,0); Wire.begin(); RTC.begin(); if (! RTC.isrunning()) { Serial.println("ʺRTC is NOT running!"ʺ); } if (!SD.begin(10)) { Serial.println("ʺerrore init SD card ;-­‐‑x "ʺ); digitalWrite(13, HIGH); return; } Serial.println("ʺinit SD card pronta :-­‐‑) "ʺ); if (!RTC.isrunning()) { Serial.println("ʺRTC non funziona!"ʺ); RTC.adjust(DateTime(__DATE__, __TIME__)); } } 69 void loop() { // check buttons status inputValue = analogRead(inputPin); if (inputValue < 100 && inputValue >= 0) inputValue = 1; else if (inputValue < 250 && inputValue > 150) inputValue = 2; else if (inputValue < 470 && inputValue > 370) inputValue = 3; else if (inputValue < 670 && inputValue > 570) inputValue = 4; else if (inputValue < 870 && inputValue > 770) inputValue = 5; else if (inputValue <= 1023 && inputValue > 950) inputValue = 0; // set the RTC timestamp DateTime now = RTC.now(); lcd.setCursor(0, 1); if (now.hour() < 10) { lcd.print("ʺ0"ʺ); } lcd.print(now.hour(), DEC); // HOUR lcd.print("ʺ:"ʺ); if (now.minute() < 10) { lcd.print("ʺ0"ʺ); } lcd.print(now.minute(), DEC); // MINUTES lcd.setCursor(6, 1); if (now.day() < 10) { lcd.print("ʺ0"ʺ); } lcd.print(now.day(), DEC); // DAY lcd.print('ʹ-­‐‑'ʹ); if (now.month () < 10) { lcd.print("ʺ0"ʺ); } lcd.print(now.month(), DEC);//MONTH lcd.print('ʹ-­‐‑'ʹ); lcd.print(now.year(), DEC); //YEAR int raw = analogRead(A1); // range 0.. 1023 long compensated = raw -­‐‑ corrcms; // adj misura per CMS non applicato long gauss = compensated * MILLIGAUSS / 1000; // adj scala a Gauss float mTesla = gauss / 10; int raw2 = analogRead(A2); // range 0.. 1024 long compensated2 = raw2 -­‐‑ corrcms2; // adj misura per CMS non applicato long gauss2 = compensated2 * MILLIGAUSS2 / 1000; // adj scala a Gauss float mTesla2 = gauss2 / 10; // update display text set to press any key if (inputValue == 1 || inputValue == 2 || inputValue == 3 || inputValue == 4 || inputValue == 5) { 70 lcd.setCursor(0, 0); lcd.print ("ʺS1: "ʺ); lcd.print(raw); lcd.print("ʺ,"ʺ); lcd.print(gauss); lcd.print("ʺG,"ʺ); lcd.print(mTesla, 0); lcd.print("ʺ mT "ʺ); delay(200); } else { lcd.setCursor(0, 0); lcd.print ("ʺS2: "ʺ); lcd.print(raw2); lcd.print("ʺ,"ʺ); lcd.print(gauss2); lcd.print("ʺG,"ʺ); lcd.print(mTesla2, 0); lcd.print("ʺ mT "ʺ); delay(200); } // CMS output // SD write RTC and CMS values myfile = SD.open("ʺcms.txt"ʺ, FILE_WRITE); if (myfile) { digitalWrite(1, HIGH); myfile.print(now.day()); myfile.print("ʺ/"ʺ); myfile.print(now.month()); myfile.print("ʺ/"ʺ); myfile.print(now.year()); myfile.print("ʺ,"ʺ); myfile.print(now.hour()); myfile.print("ʺ:"ʺ); myfile.print(now.minute()); myfile.print("ʺ:"ʺ); myfile.print(now.second()); myfile.print("ʺ,"ʺ); myfile.print(raw); myfile.print("ʺ,"ʺ); myfile.print(gauss, 4); myfile.print("ʺ,"ʺ); myfile.print(mTesla, 4); myfile.print("ʺ,"ʺ); myfile.print(raw2); myfile.print("ʺ,"ʺ); myfile.print(gauss2, 4); myfile.print("ʺ,"ʺ); myfile.print(mTesla2, 4); 71 myfile.println("ʺ"ʺ); myfile.close(); digitalWrite(1, LOW); //cambio stato al led verde } //visualizzazione sul monitor seriale Serial.print(now.day()); Serial.print("ʺ/"ʺ); Serial.print(now.month()); Serial.print("ʺ/"ʺ); Serial.print(now.year()); Serial.print("ʺ,"ʺ); Serial.print(now.hour()); Serial.print("ʺ:"ʺ); Serial.print(now.minute()); Serial.print("ʺ:"ʺ); Serial.print(now.second()); Serial.print("ʺ,"ʺ); Serial.print(raw); Serial.print("ʺ,"ʺ); Serial.print(gauss, 4); Serial.print("ʺ,"ʺ); Serial.print(mTesla, 4); Serial.print("ʺ,"ʺ); Serial.print(raw2); Serial.print("ʺ,"ʺ); Serial.print(gauss2, 4); Serial.print("ʺ,"ʺ); Serial.print(mTesla2, 4); Serial.println("ʺ"ʺ); delay(1000); } // loop Listing 4 72 Indice delle figure Fig. 1 – Tabella riassuntiva dei vettori di mm e MM. ________________________________________________ 9 Fig. 2 -­‐‑ Precessione libera (A) e in coerenza di fase (B) ______________________________________________ 10 Fig. 3 -­‐‑ Invio dell'ʹimpulso RF e creazione della MMT ______________________________________________ 11 Fig. 4 -­‐‑ Struttura della sala magnete e della gabbia di Faraday _____________________________________ 17 Fig. 5 -­‐‑ Scheda Arduino UNO _______________________________________________________________________ 37 Fig. 6 -­‐‑ Interfaccia con cui sviluppare il software per Arduino ______________________________________ 39 Fig. 7 -­‐‑ Schema a blocchi ______________________________________________________________________________ 40 Fig. 8 – Sensore ad effetto Hall A1302 _______________________________________________________________ 43 Fig. 9 -­‐ Datalogging shield di Adafruit ______________________________________________________________ 44 Fig. 10 – Menu principale dell’ambiente di sviluppo Arduino 1.6.3 ________________________________ 46 Fig. 11-­‐‑ Sito di RM dell'ʹOspedale Maggiore Policlinico di Milano. Padiglione Monteggia. _______ 51 Fig. 12 -­‐ Posizionamento rilevatore _________________________________________________________________ 54 Fig. 13 -­‐ Esposizione durante posizionamento del paziente per esame di encefalo _______________ 58 Fig. 14 -­‐ Esposizione durante posizionamento del paziente per esame di rachide LS ____________ 58 Fig. 15 -­‐ Esposizione durante dimissione del paziente dopo un esame encefalo __________________ 59 Fig. 16 -­‐ Esposizione durante dimissione del paziente dopo un esame rachide LS ________________ 59 Indice delle tabelle Tabella I – Grandezze fisiche relative ai campi magnetici __________________________________________ 20 Tabella II -­‐ Riferimenti normativi italiani ___________________________________________________________ 28 Tabella III -­‐ Limiti di esposizione _____________________________________________________________________ 31 Tabella IV – Caratteristiche tecniche DS1307 _______________________________________________________ 48 Tabella V -­‐‑ Misure di campo magnetico 1,5 T ________________________________________________________ 54 Tabella VI -­‐ Analisi uniformità e stabilità ___________________________________________________________ 55 Tabella VII -­‐ Tempi medi di permanenza nella sala RM ____________________________________________ 57 73