Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
LEZIONE # 16
Le misure di velocità possono essere eseguite con modalità molto diverse, a seconda del tipo di
elemento o di situazione per i quali siamo interessati a conoscere la velocità.
Le velocità lineari v sono importanti soprattutto con riferimento agli spostamenti dei veicoli
terrestri: autoveicoli, veicoli ferroviari, carri di qualunque tipo, movimentati per mezzo di ruote su
strada, su rotaie, su funi e altro …
Le velocità angolari ω sono importanti quando si è interessati a misurare la potenza erogata dai
motori attraverso un albero rotante (di qualunque tipo) oppure la potenza assorbita da una
qualunque machina operatrice.
Ma le velocità lineari v sono importanti anche quando si vuole conoscere l’entità dello spostamento
di una massa di fluido, sia nei casi in cui si è interessati alla misura della velocità o della portata di
un fluido oppure quando si desidera misurare la velocità relativa di un mezzo (navale o aereo)
immerso nel fluido (acqua o aria).
Si rifletta subito sul fatto che la misura della velocità per veicoli è una tra le operazioni di misura
più diffuse e frequenti che si possano trovare nell’ingegneria. Basti pensare all’enorme numero di
veicoli di ogni tipo in circolazione nel mondo. La “quasi totalità” di essi è equipaggiata a bordo con
almeno un dispositivo per la misura della velocità. Poiché la quasi totalità dei veicoli terrestri (salvo
rarissime eccezioni) è movimentata attraverso ruote, si riconosce subito che la quasi totalità delle
misure di velocità per i veicoli può essere effettuata attraverso la misura della velocità angolare
dell’albero o del mozzo che collega una delle ruote al veicolo. La velocità di avanzamento del
veicolo, in condizioni di non strisciamento delle ruote, deriva immediatamente dalla semplicissima
relazione v = ω ⋅ r dove r è il raggio (nominale) della ruota strumentata. La dipendenza diretta tra v
ed ω, attraverso il raggio r di una ruota, è illustrata anche nella figura 16.1, dove sono schematizzati
contemporaneamente alcuni metodi di taratura per strumenti dedicati alla misura di velocità.
Figura 16.1
A.A. 2009/10
LEZ #16 – pag. 1
Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
Per questo motivo, si illustreranno qui i principi di funzionamento solamente di alcuni misuratori di
velocità angolari ω, molto diffusi nell’ingegneria meccanica.
Lo strumento più semplice che si può immaginare è il contagiri meccanico ovvero, un congegno
che, in qualche modo, conta le rotazioni (i giri) dell’albero φ effettuate in un intervallo di tempo Δt
prefissato. La velocità angolare risulta immediatamente dalla ω = ϕ Δt . Qualunque sia la tecnica
utilizzata per registrare i giri compiuti dall’albero (metodo meccanico, elettrico o ottico), in uscita
dallo strumento si ottiene solamente una misura della velocità media nell’intervallo di tempo Δt.
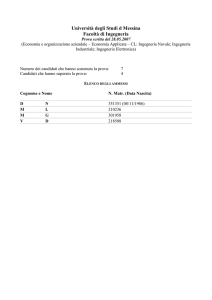
Lo schema di uno strumento meccanico capace di rilevare velocità angolari ω che abbiano anche
una “certa dinamica” è riportato sotto nella figura 16.2.
Lo strumento è basato sulla forza centrifuga Fc = mrω 2
che agisce sulle due sfere laterali di massa m, distanti r
dall’asse di rotazione, quando lo strumento è posto in
rotazione alla medesima velocità angolare incognita
dell’albero ω.
L’effetto della forza centrifuga è di allontanare le sfere
dall’asse di rotazione dell’albero in modo proporzionale
alla velocità angolare e, conseguentemente, di elevare
l’indicatore x ad una quota che rappresenta la misura di ω.
La forza centrifuga è equilibrata dalla forza elastica di
compressione della molla Fe = kx . Un cuscinetto
reggispinta disaccoppia la parte (bassa) rotante dello
strumento da quella (alta) fissa. La curva di graduazione
ha origine dall’equilibrio delle forze Fc = Fe che vale:
mr 2
mrω 2 = kx ovvero: x =
⋅ω
k
Lo strumento non è lineare e, tra l’altro, la distanza delle
masse m dall’asse di rotazione r = r (ω ) non è neppure
costante, ma dipende dalla velocità angolare. Questa
limitazione si supera con una operazione di taratura del
trasduttore. Compatibilmente con l’inerzia delle masse in
gioco, è comunque uno strumento in grado di effettuare
misure di velocità angolari istantanee.
Figura 16.2
Per la misura delle velocità angolari esistono tutta una serie di strumenti elettrici basati su principi
fisici assai diversi tra loro. Si desidera qui solamente richiamare le dinamo tachimetriche in quanto,
questi strumenti sono largamente diffusi nel settore industriale per la misura ed il controllo delle
velocità angolari dei motori e delle macchine operatrici.
Un generatore tachimetrico in corrente continua (DC), equipaggiato con un magnete permanete o
con un elettromagnete, produce in uscita un segnale in tensione eo proporzionale alla velocità
angolare ωi . La legge fisica di base sulla quale si fonda il funzionamento delle dinamo
tachimetriche è eo = Blvi , dove B indica l’intensità del campo magnetico, l la lunghezza nominale
delle bobine e v la velocità relativa delle bobina rispetto al campo magnetico. Le dinamo
tachimetriche sono strumenti la cui progettazione meccanica è mirata all’ottenimento di un segnale
A.A. 2009/10
LEZ #16 – pag. 2
Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
eo quanto più alto possibile (alta sensibilità) anche per ω basse. La relazione operativa della curva
n p ncφ
⋅ N dove np indica il numero di poli, nc
di graduazione generalmente assume la forma: eo =
60n pp
il numero di conduttori in armatura, Φ il flusso magnetico per polo o linea, N la velocità angolare in
giri al minuto, npp il numero di percorsi paralleli tra spazzole positive e negative. Come tutte le
dinamo, sono strumenti che, alle basse velocità, soffrono di un’ondulazione residua sovrapposta al
segnale di uscita che risulta difficile da filtrare.
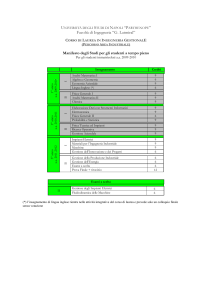
Un generatore tachimetrico in
corrente alternata (AC) è uno
strumento ad induzione, dove la
tensione alternata generata dagli
avvolgimenti primari viene
trasferita agli avvolgimenti del
secondario per mezzo di un
rotore a gabbia di scoiattolo. Il
segnale in uscita (eo) è una
tensione alternata che possiede
la stessa frequenza della
alimentazione primaria (eex) ed
ha un’intensità proporzionale
alla velocità angolare del rotore.
Anche qui la legge fisica alla
base del funzionamento è
eo = Blv p dove con vp si è
indicata la velocità periferica
delle barre della gabbia di
scoiattolo v p = ω ⋅ r . Si tratta
in sostanza di uno strumento
carrier modulatore in ampiezza.
Figura 16.3
L’uscita in alternata dello strumento manifesta un salto di fase di 180° quando la velocità angolare
dell’albero si inverte. Sono strumenti semplici e intrinsecamente robusti, che non prevedono contatti
striscianti soggetti ad usura. Le dinamo tachimetriche AC sono strumenti che però, come tutti gli
strumenti carrier a modulazione, hanno una banda passante limitata dalla frequenza della portante.
Per ovviare a tale limite si trovano in commercio strumenti con avvolgimento primario alimentato a
400Hz, che per le variazioni usuali sulle velocità angolari in ingresso ωi è più che soddisfacente. Gli
schemi di principio con i diagrammi degli ingressi e delle uscite di due dinamo tachimetriche sono
riportati nella figura 16.3.
Gli strumenti visti fin qui, e molti altri in commercio, hanno tutti l’inconveniente di dover essere
connessi meccanicamente con l’albero che ruota alla velocità angolare incognita ω. Ciò significa
che la coppia che pone in rotazione lo strumento viene prelevata dall’albero in esame. Questa
circostanza influisce sulla finezza dello strumento e potrebbe essere non tollerata.
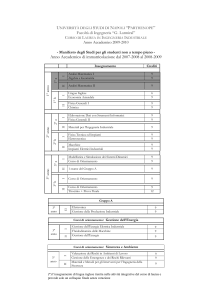
Un metodo per misurare la ω che non richiede il contatto con l’albero è il seguente: sulla testa
dell’albero rotante viene applicato un piccolo disco bianco con una tacca nera incisa sulla periferia,
come indicato in figura 16.4.
A.A. 2009/10
LEZ #16 – pag. 3
Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
Ad una certa distanza, perpendicolarmente al disco, viene posta una
lampada capace di scaricare ad intermittenza, che produce dei lampi
di luce con una durata dell’ordine dei 10 μs (10-5 s). Si ottiene così
una illuminazione del disco intermittente a “flash”.
L’operatore è in grado di variare la frequenza delle scariche della
lampada per mezzo di un apposito dispositivo (vedi oltre).
La lampada si accende quindi con frequenza fg variabile, mentre il
Figura 16.4
disco ruota alla frequenza f =
ω
incognita.
2π
Quando l’operatore riesce a regolare la frequenza della lampada in modo da avere f g = f , si ottiene
un effetto ottico che fa “apparire la tacca ferma” sempre nella stessa posizione. Di fatto, la lampada
emette un lampo di luce da 10 μs sempre e solo quando la tacca scura ripassa, nel suo moto
rotatorio, esattamente per la medesima posizione. L’effetto ottico è “aiutato” dal tempo di
persistenza delle immagini sulla retina dell’occhio umano, che è dell’ordine di 1/25 di secondo,
molto superiore al tempo di accensione della lampada.
Se l’operatore dovesse impostare una frequenza di accensione della lampada fg leggermente
inferiore alla frequenza di rotazione f del disco, l’effetto ottico sarebbe di osservare la tacca
muoversi lentamente in avanti, ovvero nel verso concorde con la rotazione del disco. Questo perché
in ogni periodo 1/fg impiegato dalla lampada per emettere un altro flash, la tacca sul disco avrà
avuto il tempo di compiere un giro completo, più un piccolo angolo supplementare, la cui ampiezza
dipende proprio dalla differenza dei due periodi 1 / f g − 1 / f .
Se l’operatore dovesse impostare una frequenza di accensione della lampada fg leggermente
superiore alla frequenza di rotazione f del disco, l’effetto ottico sarebbe di osservare la tacca
muoversi lentamente all’indietro, ovvero nel verso opposto a quello della rotazione del disco.
Questo effetto, apparentemente sorprendente, dipende dal fatto che nel periodo 1/fg tra due
accensioni successive della lampada, la tacca non fa a tempo a riportarsi esattamente sulla posizione
di partenza e, rispetto all’accensione del flash, ad ogni giro “rimane indietro” di un piccolo angolo,
la cui ampiezza dipende ancora dalla differenza dei due periodi 1 / f − 1 / f g .
L’effetto ottico appena descritto è l’effetto stroboscopio che può essere utilizzato per la misura
senza contatto della velocità angolare ω = 2πf di un albero.
Si faccia attenzione al fatto che, se le frequenze in gioco sono elevate, è possibile osservare la tacca
1
ferma anche con una frequenza della lampada f g = f . Infatti, in questa condizione la tacca ha il
2
tempo di compiere esattamente due giri. Per f g = 2 ⋅ f invece, si osservano due tacche ferme,
diametralmente opposte; in questa condizione la tacca ha il tempo di compiere solamente mezzo
giro. Per evitare errori di giudizio grossolani, è buona norma iniziare a variare la frequenza della
lampada a partire da frequenze alte e scendere mano mano, fino ad osservare un’unica tacca ferma.
Per l’albero viene quindi misurata la velocità ω = 2πf g . Più che uno strumento vero e proprio, lo
stroboscopio è un metodo di misura che richiede l’intervento e il giudizio dell’operatore. Esso viene
utilizzato tutt’oggi soprattutto per il monitoraggio continuo di quelle velocità angolari che devono
rimanere rigorosamente costanti. La parte strumentale è costituita unicamente dal dispositivo di
alimentazione e controllo della frequenza della lampada. Uno schema semplice di come è realizzata
la catena di controllo della lampada e riportato sotto nella figura 16.5.
A.A. 2009/10
LEZ #16 – pag. 4
Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
Figura 16.5
Lo stroboscopio è un metodo preciso e molto sensibile, perché consente letteralmente di “vedere” il
comportamento della ω (osservazione delle fluttuazioni: wow and flutter). E’ capace di misurare
velocità ω molto elevate, ben oltre i valori consueti delle applicazioni industriali, ha quindi un
campo di misura molto esteso. E’ però un metodo che “non ha banda passante” ovvero, è un metodo
per la misura di ω praticamente costanti. Si faccia bene attenzione a non confondere il “valore
numerico” della frequenza di rotazione f = ω / 2π con la “variazione della velocità” ω(t) che è la
grandezza in ingresso.
Figura 16.6
A.A. 2009/10
Uno degli strumenti più diffusi per la misura
della velocità angolare ω, soprattutto in virtù del
suo impiego nel settore dell’autotrazione, è
certamente il tachimetro o contagiri magnetico.
Gli elementi fondamentali dello strumento,
illustrati nella figura 16.6 di lato, sono due
alberini folli tra loro. Ad uno degli alberini è
collegata una cappa a forma di bicchierino
cilindrico, con la parte cilindrica esterna fatta di
materiale conduttore. Questo è l’alberino al
quale è collegato l’indice (in figura), ed esso è
fermato al telaio per mezzo di una molla elastica
di richiamo. L’altro alberino, ad un estremo è
collegato meccanicamente all’albero che ruota
con la velocità incognita ω mentre, all’altro
estremo viene fissato un magnetino permanente
che gira dentro la cappa cilindrica.
Il magnetico e la cappa non hanno alcun
contatto meccanico. Quando il magnetino è
posto in rotazione alla velocità ω dentro alla
cappa, induce nel circuito elettrico che questa
costituisce le correnti parassite i. Le correnti
indotte nella cappa si oppongono al moto del
LEZ #16 – pag. 5
Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
magnetino con la forza F = Bli . In realtà, le forze agiscono in prossimità delle espansioni polari del
magnetico per cui viene a crearsi una coppia di forze C = F ⋅ b = Bil ⋅ b che si oppone al moto
relativo, con b braccio della coppia. Le correnti parassite i non sono di agevole determinazione. Ma
per esprimere la f.e.m. indotta nella cappa vale sempre la relazione e = Blv con v = ω ⋅ b / 2 ,
e Blv Blb ⋅ ω
velocità periferica della rotazione. E’ quindi possibile esprimere la corrente i = =
=
R
R
2R
Sostituendo quest’ultima relazione in quella della coppia scritta poco sopra, si ottiene:
2
Blb ⋅ ω (Blb ) ⋅ ω
C = Blb ⋅
=
. La coppia frenante tenderebbe a trascinare nella rotazione la cappa,
2R
2R
ma questa è richiamata dalla coppia elastica Ce = kθ .
L’equazione di equilibrio dinamico, per ogni valore della velocità angolare ω, è quindi C = Ce
ovvero:
(Blb )2 ⋅ ω
2R
= k ⋅θ
lo strumento indica in uscita un angolo θ proporzionale alla velocità
angolare ω. La curva di graduazione è lineare: θ =
(Blb )2 ⋅ ω , ed è riportata anche in figura 16.6.
2 Rk
Per la misura della velocità di un fluido, occorre considerare in principio fluidi incompressibili
ovvero, liquidi o gas in movimento con velocità v << vs molto inferiori a quella del suono.
Per misurare la velocità di un fluido, una prima idea potrebbe essere quella di immettere nella
corrente fluida dei corpuscoli solidi che, una volta immersi, vengono trascinati dal flusso e svolgono
la funzione di “indicatori” della velocità del fluido. Per quanto elementare possa sembrare questa
tecnica, si invita a riflettere che su di essa sono basate alcune delle misure di velocità per fluidi
tecnologicamente più avanzate come, ad esempio, la fluoroangiografia per la misura della velocità
del sangue nelle arterie e nelle vene, eseguita con l’ausilio di traccianti radio-opachi immessi nel
flusso sanguigno, oppure la PIV (Particle Image Velocimetry), con la quale è possibile effettuare la
ricostruzione dinamica dell’intero campo delle velocità o delle vorticosità in una regione d’interesse
del fluido. Queste tecniche di misura sono troppo complesse per esser trattate in un corso di base ma
invitano a non sottovalutare mai le potenzialità di un metodo di misura, anche quando, a priori,
potrebbe apparire troppo elementare.
Uno degli strumenti più utilizzati nelle applicazioni comuni è il tubo di Pitot. Per semplicità, si farà
riferimento inizialmente ad un liquido che scorre in una canalina a cielo aperto, come schematizzato
nella figura 16.7.
Figura 16.7
A.A. 2009/10
In corrispondenza della sezione (1) il fluido
avanza indisturbato con velocità v. Quando
l’elemento di fluido, in condizioni di
regime, giunge in prossimità della sezione
(2) risente degli effetti di un ostacolo,
l’imbocco del tubo, e rallenta fino a
fermarsi completamente, proprio davanti
alla presa del tubo. L’energia cinetica
dell’elemento di fluido si è trasformata in
energia potenziale ed ha prodotto un
innalzamento h del menisco fluido nella
parte di tubo che emerge dal pelo libero.
Indicando con ρ la densità del fluido,
valgono le relazioni energetiche seguenti:
LEZ #16 – pag. 6
Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
sez. (1)
sez. (2)
1
E = p st + ρv 2
2
E = pTOT
energia di pressione + energia cinetica
energia totale di pressione (detta di ristagno)
L’energia del fluido per unità di volume nelle sezioni (1) e (2) può essere considerata in prima
approssimazione la medesima quindi, si può scrivere il bilancio energetico nella forma
1
p st + ρv 2 = pTOT che rappresenta la ben nota equazione di Bernoulli.
2
1
Nella relazione ρv 2 = pTOT − p st è possibile sostituire pTOT − p st = ρgh che è la legge di Stevino
2
1
1 2
v
per le pressioni idrostatiche e si ottiene la curva di graduazione: ρv 2 = ρgh → h =
2g
2
La quota h del menisco è un indice diretto della velocità v2 e lo strumento non è lineare !
Con una piccola modifica costruttiva è possibili impiegare un simile dispositivo anche per la misura
della velocità di fluidi dentro tubi in pressione. Uno schema di principio è riportato sotto nella
figura 16.8.
Figura 16.8
Si vede dalla figura che, in questo caso, rimangono individuate due prese Ps e Pd che prendono il
nome di presa statica e presa dinamica. Si faccia attenzione al fatto che, in questo caso, la densità
del fluido che scorre nella tubazione ρ ≠ ρ * è diversa dalla densità del fluido manometrico. Per la
curva di graduazione si ha quindi: v =
2 ⋅ ΔP
ρ
=
2 ⋅ ρ * gh
ρ
La difficoltà operativa principale nell’utilizzo di tale dispositivo risiede soprattutto nella
realizzazione accurata della presa statica. Quando la differenza di densità dei due fluidi non è
marcata, occorre sostituire il manometro a liquido con un manometro a membrana.
Il problema del reperimento di una presa dinamica e di una presa statica nelle posizioni corrette, è
un problema fondamentale per la progettazione della sonda di uno strumento autonomo.
Con riferimento allo schema della figura 16.9, si consideri un sondino di “forma aerodinamica”,
perfettamente liscio, che non induca turbolenze nel flusso. Esso è sostenuto dallo stelo b e viene
investito da una corrente fluida alla velocità v. Lo stesso identico schema è valido anche se è il
sondino che si muove alla velocità v in un fluido fermo.
A.A. 2009/10
LEZ #16 – pag. 7
Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
Si consideri l’elemento del filetto fluido (A) indicato in figura 16.9 in moto laminare. Nella sezione
G
S1 , prima di incontrare il sondino, esso possiede la velocità indisturbata v . Nella sezione generica
S2 , quando l’elemento fluido è stato costretto a deviare la propria traiettoria ed è in contatto con la
G G G
superficie del sondino, esso possiede la velocità w = v + v f . Il fluido è incompressibile e, nella
G G
generica sezione S2 , la velocità dell’elemento fluido w < v è minore della velocità indisturbata a
G
causa della “componente di frenamento” v f , che è sempre ortogonale alla superficie del sondino.
Figura 16.9
Si applichi ora il teorema di Bernoulli che esprime la conservazione dell’energia nelle due sezioni
generiche considerate in figura 16.9:
1
S1)
ETot = p st + ρv 2
2
1
S2)
ETot = p + ρw 2
con
p ≠ p st
p = pressione generica
2
1
1
p st + ρv 2 = p + ρw 2
Risulta:
2
2
1
p − p st = ρ v 2 − w 2
2
⎛ w2 ⎞
1
p − p st = ρv 2 ⎜⎜1 − 2 ⎟⎟
2
⎝ v ⎠
(
)
w 2 2( p − p st )
prende il nome di coefficiente di pressione ed è
Il termine tra parentesi K p = 1 − 2 =
ρv 2
v
importante per la determinazione delle posizioni corrette delle prese statica e dinamica sul sondino.
A.A. 2009/10
LEZ #16 – pag. 8
Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
Kp è massimo (=1) quando w = 0 , ovvero v = - vf e tutta la velocità dell’elemento fluido viene
frenata. Questa situazione accade solamente sulla punta del sondino, in corrispondenza dell’asse. In
tale punto la pressione generica p = pTot è massima. E’ il sito giusto per posizionare la presa
dinamica Pd.
Kp è nullo (=0) quando w = v , ovvero vf = 0 la dove la superficie del sondino non provoca alcun
“frenamento” all’elemento fluido. In tale punto la pressione generica p = pst è la pressione statica.
E’ il sito giusto per posizionare la presa statica Ps.
Si osservi che il Kp può assumere valori negativi nelle zone di coda del sondino, quando w > v e p
< pst , ovvero nelle zone di depressione dove il fluido accelera per riformare la configurazione
indisturbata del campo fluidodinamico.
Identificate così le posizioni corrette delle prese statica e dinamica, il sondino può immediatamente
essere utilizzato, in accoppiamento con un manometro differenziale, per misure di velocità del
1
fluido. La curva di graduazione di tale strumento (il sondino) è: pTOT − p st = ρv 2
2
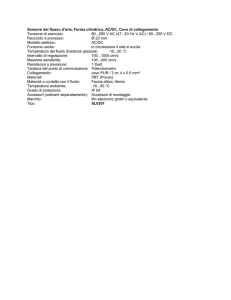
Il sondino appena studiato è un prototipo del tubo di Pitot commerciale. Lo schema costruttivo di
un tubo di Pitot reale è riportato nella figura 16.10 della pagina seguente. La forma è decisamente
affusolata ed anche lo stelo di sostegno è sempre conformato ad ala, in modo da perturbare il meno
possibile il flusso. Si riconosce facilmente la posizione delle prese statica e dinamica. Sulla punta
dello strumento è tracciato il diagramma polare delle pressioni e, subito sotto, il diagramma
cartesiano del Kp in funzione dello sviluppo assiale del tubo. Per evitare di allungare troppo lo
strumento sarebbe anche possibile posizionare le prese statiche vicino alla punta, in corrispondenza
dell’angolo indicato di 48° ma, in tal caso, basterebbe un minimo disassamento dello strumento per
far uscire la presa statica dalla posizione corretta (Kp = 0). Le prese statiche sono perciò posizionate
ad una distanza di 5-6 diametri dalla punta, dove gli effetti sul Kp dovuti alla punta ed allo stelo si
compensano.
esempio:
se si utilizza il Pitot in accoppiamento con un manometro differenziale ad acqua per
2 ⋅ Δp
misurare la velocità dell’aria, nella curva di graduazione v =
è possibile
ρ
effettuare la misura delle pressioni direttamente in mmH2O .
Infatti 1mmH 2 O ≅ 1kg f / m 2 e basta esprimere la densità dell’aria nel sistema tecnico
kg f s 2 1 kg f s 2
1.29 M p
0
.
13
=
≅
9.81 m 3
m4
8 m4
2
e si ottiene: v =
⋅1 = 16 = 4m / s
1/ 8
ρ aria = 1.29kg / m 3 =
Dall’esempio appena svolto, si osservi che una velocità dell’aria di 4m/s produce un innalzamento
del menisco d’acqua di 1 solo millimetro (circa 10Pa). Il tubo di Pitot non è uno strumento lineare
ed è poco sensibile per valori bassi della velocità. Non è perciò uno strumento idoneo per misure di
velocità basse. Esso è invece uno strumento fondamentale nel settore aeronautico, dove grazie alle
elevate velocità in gioco, i limiti di sensibilità alle basse velocità non incidono minimamente
nell’utilizzo. Se mai, si dovrà prestare attenzione a che l’ipotesi di fluido incompressibile sia ancora
verificata (vedi oltre).
A.A. 2009/10
LEZ #16 – pag. 9
Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
Figura 16.10
A.A. 2009/10
LEZ #16 – pag. 10
Appunti di Misure Meccaniche & Termiche (canale A-L)
corso di Laurea Magistrale in Ingegneria Meccanica (ordinamento ex270/04)
Facoltà di Ingegneria - Università degli studi di Roma “La Sapienza”
________________________________________________________________________________
Si tenga presente infine che Kp è un parametro che dipende anche dal numero di Reynolds, questa
circostanza permette di tarare il Tubo di Pitot con fluidi differenti da quelli per i quali sono destinati
all’uso.
In conclusione si vuole solamente accennare al fatto che per fluidi compressibili (Ma ≥ 1) occorre
v
eseguire una correzione della curva di graduazione con il numero di Mach Ma = , dove v è la
c
velocità del fluido e c è la velocità del suono.
1
Al punto di ristagno vale po = p + ρv 2 [1 + f ( Ma)] e di questa equazione di Bernoulli “estesa”
2
risente anche il coefficiente di pressione Kp . In altri termini, per velocità con valori del numero di
Mach intorno a 0.8, con le relazioni per fluidi incompressibili si commette già un errore di circa il
20%.
Per Ma = 1 si è in condizione di onda d’urto normale, le equazioni scritte non valgono più ma la
trattazione rigorosa di questo caso importante esula dai limiti di un corso elementare. Ciò non di
meno, si tenga presente che, con i dovuti accorgimenti, il tubo di Pitot funziona egregiamente con
flussi supersonici.
Note:
Figure 16.4, 16.5, 16.7, 16.8, 16.9, 16.10 courtesy of:
Branca F.P. – Misure Meccaniche – ed. ESA
Figure 16.1, 16.2, 16.3, 16.6 courtesy of:
Doebelin E.O. – Measurement systems, application and design – McGraw Hill
A.A. 2009/10
LEZ #16 – pag. 11