In questo catalogo:
Servomotori Brushless Serie BM
Elevata efficienza e prestazioni
Tecnologia avanzata a poli scomposti
7 taglie disponibili
Coppia nominale fino a 10 Nm
Disponibili con freno
Encoder ottico standard, a richiesta resolver o encoder assoluto multigiro
Azionamenti Serie Eco
Funzioni meccatroniche per la gestione di profili di movimenti lineari anche complessi
Completamente integrati nei Servoattuatori Lineari Linearmech
- Controllo di posizione
- Controllo di coppia
- Controllo di velocità
Servomotori
Brushless
Altri prodotti della gamma Servomech e Linearmech
dove applicare Servomotori Brushless Serie BM di produzione Linearmech
Martinetti con vite a sfere
Servomech
Servoattuatori lineari
Linearmech
Attuatori lineari meccanici
Servomech
www.linearmech.it
Linearmech S.r.l.
Via Caduti di Sabbiuno, 3 - 40011 Anzola dell’Emilia (Bologna) - ITALIA
Tel. +39.051.6504311 - Fax +39.051.6504313 - [email protected]
Catalogo 01 / 14
Altri prodotti della gamma Servomech e Linearmech
dove applicare i Servomotori Brushless Serie BM di produzione Linearmech
Attuatori lineari meccanici
Serie ATL
Azionamento lineare con vite trapezoidale
7 grandezze disponibili
Capacità di carico da 4 kN a 80 kN
Velocità lineare fino a 150 mm/s
Serie BSA
Azionamento lineare con vite a sfere
7 grandezze disponibili
Capacità di carico da 4 kN a 60 kN
Velocità lineare fino a 120 mm/s
Serie UAL
Azionamento lineare con vite trapezoidale
5 grandezze disponibili
Capacità di carico da 2 kN a 15 kN
Velocità lineare fino a 500 mm/s
Serie UBA
Azionamento lineare con vite a sfere
5 grandezze disponibili
Capacità di carico da 2 kN a 15 kN
Velocità lineare fino a 500 mm/s
Per maggiori informazioni consultate i nostri cataloghi:
© Copyright LINEARMECH 2014
I dati riportati nel presente catalogo, accuratamente controllati, sono comunque indicativi e non costituiscono impegno alcuno.
LINEARMECH si riserva, in qualsiasi momento, di apportare modifiche a propria discrezione senza preavviso.
Sommario
1. Servomotori brushless serie BM
1.1 Caratteristiche generali..........................................................................................
1.2 Caratteristiche costruttive......................................................................................
1.3 Panoramica grandezze..........................................................................................
1.4 Caratteristiche tecniche.........................................................................................
1.5 Dimensioni e prestazioni
1.5.1 BM 45 L...........................................................................................................
1.5.2 BM 63 S...........................................................................................................
1.5.3 BM 63 L...........................................................................................................
1.5.4 BM 82 S...........................................................................................................
1.5.5 BM 82 L...........................................................................................................
1.5.6 BM 102 S.........................................................................................................
1.5.7 BM 102 L6.......................................................................................................
1.5.8 BM 102 L8.......................................................................................................
1.5.9 BM 45 L IEC.....................................................................................................
1.5.10 BM 63 S IEC....................................................................................................
1.5.11 BM 63 L IEC.....................................................................................................
1.5.12 BM 82 S IEC....................................................................................................
1.5.13 BM 82 L IEC ....................................................................................................
1.5.14 BM 102 S IEC..................................................................................................
1.5.15 BM 102 L6 IEC - BM 102 L8 IEC.....................................................................
1.6 Feedback motore..................................................................................................
1.7 Protettori termici....................................................................................................
1.8 Connessioni motore..............................................................................................
1.8.1 BM 45 / 63 CN - Connettori M17.....................................................................
1.8.2 BM 45 / 63 CV - Cavo non terminato...............................................................
1.8.3 BM 82 / 102 CN - Connettori M23...................................................................
pag. 2
pag. 3
pag. 4
pag. 6
pag. 10
pag. 12
pag. 14
pag. 16
pag. 17
pag. 18
pag. 19
pag. 20
pag. 21
pag. 22
pag. 23
pag. 24
pag. 24
pag. 25
pag. 25
pag. 26
pag. 27
pag. 28
pag. 28
pag. 29
pag. 30
2.Azionamenti
2.1 Caratteristiche generali..........................................................................................
2.2 SAP (Stand Alone Positioning)...............................................................................
2.3 MSQ (Motion Sequencer)......................................................................................
2.4 Asse elettrico........................................................................................................
2.5 Reti di campo........................................................................................................
2.6 Modelli e funzionalità.............................................................................................
2.7 Trasduttori utilizzabili..............................................................................................
2.8 Abbinamenti consigliati: servomotori e azionamenti...............................................
2.9Dimensioni............................................................................................................
pag. 31
pag. 32
pag. 33
pag. 34
pag. 34
pag. 35
pag. 35
pag. 36
pag. 38
3. Cavi di connessione
3.1 Cavo di potenza.................................................................................................... pag. 39
3.2 Cavo di segnale.................................................................................................... pag. 39
4. Designazione e codifica
4.1 Codifica servomotore............................................................................................
4.2 Codifica azionamento............................................................................................
4.3 Codifica cavi di connessione.................................................................................
4.3.1 Cavi di segnale.................................................................................................
4.3.2 Cavi di potenza................................................................................................
pag. 40
pag. 41
pag. 42
pag. 42
pag. 42
Appendice
A.Definizioni ............................................................................................................. pag. 43
B. Condizioni di prova ............................................................................................... pag. 44
1.
Servomotori brushless Serie BM
LINEARMECH ha deciso di utilizzare le migliori tecnologie messe a punto negli ultimi anni per proporre
una gamma di Servomotori in cui viene privilegiata l’elevata coppia specifica e la linearità con cui questa
viene erogata. I servomotori brushless serie BM sono ad altissima efficienza, costruiti con materiali di ultima
generazione e con tecnologia a settori scomposti. Questa tecnologia consente di realizzare avvolgimenti di
statore con il massimo riempimento delle cave, ottenendo così un rapporto potenza/volume estremamente
elevato.
Questi servomotori sono stati progettati per un funzionamento continuo con raffreddamento naturale
per convezione, senza dispositivi esterni di raffreddamento. Il calore che viene generato, principalmente
negli avvolgimenti di statore, viene dissipato attraverso il corpo esterno del motore per effetto dell’ottimo
accoppiamento meccanico e termico fra queste due parti.
1.1
Caratteristiche generali
Tipo di motore:
Raffreddamento:
Montaggio:
Materiale dei magneti:
Classe di isolamento:
brushless a FEM sinusoidale (sincrono a magneti permanenti)
convezione naturale
IM B5
NeFeB
F (sovratemperatura sugli avvolgimenti 100 K
con temperatura ambiente 40°C e margine di sicurezza 15°C)
Grado di protezione:
corpo motore IP 54
albero motore IP 44 standard, IP 54 con paraolio
Temperatura di funzionamento: (0 ... + 40)°C
Temperatura di stoccaggio:
(- 10 ... + 60)°C
Umidità:
max. 85 % senza condensazione
Altitudine di funzionamento:
< 1000 m s.l.m.
(un declassamento deve essere applicato per altitudini superiori)
Protezione termica:
opzionali: PTC, PTO o KTY
Feedback motore:
encoder ottico, LINE-DRIVER, 2000 ppr (standard)
resolver, 1 coppia polare 7 V rms, 10 kHz (optional)
encoder assoluto multigiro BISS (optional)
Freno di stazionamento:
opzionale, alimentazione 24 V dc
Grado di qualità di equilibratura: G 2.5 (standard) secondo IEC 1940-1
Normative di riferimento:
IEC 60034-1, IEC 60034-5, IEC 60034-6, IEC 60034-7, IEC 60034-11,
ISO 1940-1
Marcatura:
CE
2
Servomotori Brushless Linearmech
1.
1.2
Servomotori brushless Serie BM
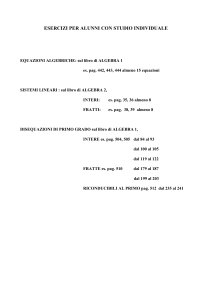
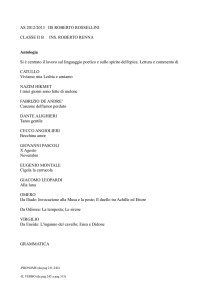
Caratteristiche costruttive
Per la costruzione dello STATORE si è adottato la tecnologia dell’avvolgimento a “settori scomposti“ che
comporta un’ottimizzazione dell’utilizzo del rame. Più in particolare questa tecnologia costruttiva porta ai
seguenti vantaggi:
•
Maggiore riempimento della cava: avendo la possibilità di avvolgere singolarmente ogni “dente” di
statore si possono disporre in maniera più ordinata i fili di rame e quindi sfruttare al meglio lo spazio
disponibile. Se con gli avvolgimenti tradizionali si riesce a sfruttare circa il 30% dello spazio disponibile
per l’alloggiamento del rame, con la tecnologia a “settori scomposti“ si può arrivare al 40% ed oltre.
•
Minore lunghezza delle testate di rame: le testate non hanno un ruolo attivo nella produzione della
coppia del motore ma hanno solo lo scopo di collegare elettricamente tra loro i conduttori “ attivi “
posizionati in cave distanti. Essendo naturalmente percorsi da corrente sono sedi di perdite ed è evidente
quindi che riducendo al minimo questi elementi, aumenta l’efficienza del motore.
Questi elementi propri della tecnologia a “settori scomposti“ determinano un considerevole aumento
delle prestazioni dei servomotori. E’ possibile produrre motori che, a parità di dimensioni rispetto a motori
costruiti con tecnologie tradizionali, hanno prestazioni, sia in termini di coppia che di efficienza energetica,
notevolmente superiori.
La geometria dei magneti e le loro protezioni meccaniche determinano una struttura del rotore solida
che minimizza l’effetto cogging (dentellamento). Di seguito si propone un approfondimento di questi aspetti:
•
Geometria dei magneti: al fine di minimizzare la coppia di cogging, mediante l’utilizzo dei software
di simulazione, si è determinato la forma del magnete che rendesse minima questa caratteristica e
che contemporaneamente rendesse minima anche la distorsione della tensione generata del motore.
Il risultato che si è ottenuto è un motore che presenta una bassissima coppia d’impuntamento e un
bassissimo ripple di coppia.
•
Protezione dei magneti in acciaio inox: i magneti permanenti utilizzati nei servomotori brushless,
sono magneti basati sulle terre rare (NdFeB) che hanno ottime proprietà magnetiche in termini di
“densità di energia“ ma essendo materiali sinterizzati possono essere soggetti a corrosione se esposti
ad ambienti di lavoro particolarmente aggressivi. Oltre a questo i magneti fissati sull’albero motore sono
soggetti, durante la rotazione, sia a forze centrifughe che a forze di attrazione reciproca. Per assicurare
il perfetto bloccaggio meccanico dei magneti ed il loro isolamento nei confronti dell’ambiente esterno si
è adottato un sistema di contenimento basato su boccole di acciaio inox che vengono inserite in ogni
rotore della serie BM.
Connettore motore
e freno
Bandaggio dei
magneti in acciaio inox
Molla di precarico assiale cuscinetti
Connettore encoder/resolver e
termoprotettore (opzionale)
Magneti
Cuscinetto
posteriore
Albero motore
Lamierini di statore
Parapolvere
www.linearmech.it
Cuscinetto anteriore
Avvolgimenti di statore
Freno di stazionamento
Encoder / resolver
3
1.
1.3
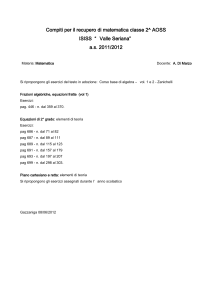
Servomotori brushless Serie BM
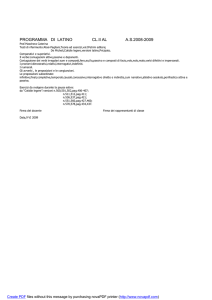
Panoramica grandezze
Flangia QUADRA
O D h7
O d j6
I servomotori Linearmech sono
disponibili in esecuzione standard con
interfaccia di collegamento con flangia
quadra e albero cilindrico.
O F u 0.1
qQ
L1
Coppia
nominale
[Nm]
Coppia a rotore
bloccato
[Nm]
Coppia
massima
[Nm]
BM 45 L
0.32
0.35
1.05
9
40
50
45
122
BM 63 S
0.6
0.7
2.1
14
50
75
63
123
BM 63 L
1.3
1.35
4.2
14
50
75
63
148
BM 82 S
1.3
1.5
4.5
19
70
100
82
134
BM 82 L
2.5
2.9
9
19
70
100
82
159
BM 102 S
4.1
5.2
15
24
90
115
102
176
BM 102 L6
6.4
7.3
22
24
90
115
102
226
BM 102 L8
6.7
9
30
24
90
115
102
226
Servomotore
Ød ØD ØF oQ
L1
[mm] [mm] [mm] [mm] [mm]
NOTA: per le dimensioni di ingombro e interfaccia complete consultare il par. 1.5 “Dimensioni e prestazioni”.
BM 45 L
4
BM 63 S
BM 63 L
BM 82 S
Servomotori Brushless Linearmech
1.
1.3
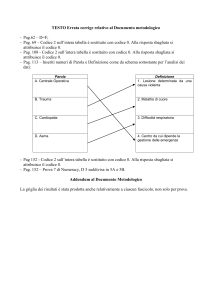
Servomotori brushless Serie BM
Panoramica grandezze
Interfacce IEC
O d j6
O D H7
I servomotori Linearmech sono disponibili anche con
interfaccia di collegamento secondo normative IEC 34-7,
UNEL 05513 (flangia tonda IEC B14 e albero con linguetta).
O F u 0.1
OG
Servomotore
Interfaccia IEC
Ød
[mm]
ØD
[mm]
ØF
[mm]
ØG
[mm]
BM 45 L IEC
56 B14
9
50
65
80
BM 63 S IEC
63 B14
11
60
75
90
BM 63 L IEC
71 B14
14
70
85
105
BM 82 S IEC
80 B14
19
80
100
120
BM 82 L IEC
80 B14
19
80
100
120
BM 102 S IEC
90 B14
24
95
115
140
BM 102 L6 IEC
90 B14
24
95
115
140
BM 102 L8 IEC
90 B14
24
95
115
140
NOTA: per le dimensioni di ingombro e interfaccia complete consultare il par. 1.5 “Dimensioni e prestazioni”.
BM 82 L
www.linearmech.it
BM 102 S
BM 102 L6
BM 102 L8
5
1.
1.4
Servomotori brushless Serie BM
Caratteristiche tecniche
Grandezza servomotore
BM 45 L - 30
Tensione nominale drive
Unom
[V]
24 V dc
Coppia a rotore bloccato (stallo)
T0, 100K
[Nm]
0.35
Coppia nominale continuativa
Tnom, 100K
[Nm]
0.32
Coppia massima (picco)
Tp
[Nm]
1.05
Velocità nominale
nnom
[g/min]
3000
Velocità massima
nmax
[g/min]
4000
Corrente a rotore bloccato (stallo)
I0, 100K
[A]
7.4 ( )
3.8 (1)
1.25
Corrente massima (picco)
Ip
[A]
24.4 ( )
1
12.5 ( )
3.95
Costante di tensione
kE
[V/1000 g/min]
5 (1)
8.9 (1)
17.2
Costante di coppia
kT
[Nm/A]
0.047 (1)
0.09 (1)
0.28
Costante di tempo termica
tth
[min]
Resistenza di avvolgimento
Rph
[Ω]
0.38
1.4
9.7
Induttanza di avvolgimento
LD
[mH]
0.69
2.4
16.7
Costante di tempo elettrica
tel
[ms]
1.8
1.7
Momento d’inerzia (senza freno)
Jmotore
[kg × m ]
0.091 × 10
Momento d’inerzia (con freno)
Jmotore BR
[kg × m2]
0.092 × 10-4
Coppia nominale del freno
TBR
[Nm]
Tensione di alimentazione freno
UBR
[V]
Potenza assorbita bobina
PBR
[W]
12.8
Ritardo all’inserzione del freno
tBR
[ms]
40
Ritardo al rilascio del freno
t-BR
[ms]
7
Carico radiale ammissibile sull‘albero
FR
[N]
150
Carico assiale ammissibile sull‘albero
FN
[N]
50
Massa senza freno / massa con freno
m
[kg]
0.9 / 1.2
Numero di poli
48 V dc
230 V dc
8
1
1
12
2
1.7
-4
0.8
+ 5%
24 V dc - 10 %
(1) - valori DC riferiti a commutazione trapezia
NOTA: a richiesta sono disponibili avvolgimenti per velocità nominali superiori, fino a 6000 giri/min.
Contattate il nostro ufficio tecnico per maggiorni informazioni.
6
Servomotori Brushless Linearmech
1.
1.4
Servomotori brushless Serie BM
Caratteristiche tecniche
BM 63 S - 30
24 V dc
48 V dc
Grandezza servomotore
BM 63 L - 30
230 V ac
24 V dc ( )
2
48 V dc
230 V ac
[V]
Unom
Tensione nominale drive
0.7
1.35
[Nm]
T0, 100K
Coppia a rotore bloccato (stallo)
0.6
1.3
[Nm]
Tnom, 100K
Coppia nominale continuativa
2.1
4.2
[Nm]
Tp
Coppia massima (picco)
3000
3000
[g/min]
nnom
Velocità nominale
4000
4000
[g/min]
nmax
Velocità massima
8
8
Numero di poli
15.9 ( )
7.7 ( )
0.98
35 ( )
15.7 ( )
2.1
[A]
I0, 100K
Corrente a rotore bloccato (stallo)
50.8 ( )
1
25.8 ( )
3.7
1
115 ( )
53 ( )
7.1
[A]
Ip
Corrente massima (picco)
4.7 (1)
9.7 (1)
41
4.3 (1)
9.4 (1)
43
[V/1000 g/min]
kE
Costante di tensione
0.044 (1)
0.09 (1)
0.67
0.04 (1)
0.089 (1)
0.71
[Nm/A]
kT
Costante di coppia
[min]
tth
Costante di tempo termica
1
1
1
1
15
1
1
15
0.13
0.5
17.4
0.09
0.2
7.1
[Ω]
Rph
Resistenza di avvolgimento
0.39
1.5
53
0.17
0.8
30
[mH]
LD
Induttanza di avvolgimento
3
3
3
1.9
4.2
4.2
[ms]
tel
Costante di tempo elettrica
-4
0.272 × 10
[kg × m ]
Jmotore
Momento d’inerzia (senza freno)
0.174 × 10-4
0.290 × 10-4
[kg × m2]
Jmotore BR
Momento d’inerzia (con freno)
2.5
2.5
[Nm]
TBR
Coppia nominale del freno
[V]
UBR
Tensione di alimentazione freno
0.156 × 10
24 V dc
-4
+ 5%
- 10 %
24 V dc
+ 5%
- 10 %
2
13.3
13.3
[W]
PBR
Potenza assorbita bobina
40
40
[ms]
tBR
Ritardo all’inserzione del freno
7
7
[ms]
t-BR
Ritardo al rilascio del freno
230
230
[N]
FR
Carico radiale ammissibile sull‘albero
70
70
[N]
FN
Carico assiale ammissibile sull‘albero
1.25 / 1.90
1.85 / 2.50
[kg]
m
Massa senza freno / massa con freno
(1) - valori DC riferiti a commutazione trapezia
( ) - solo servizio intermittente S3 25% - 10min
2
www.linearmech.it
7
1.
1.4
Servomotori brushless Serie BM
Caratteristiche tecniche
Grandezza servomotore
BM 82 S - 30
230 V ac
Tensione nominale drive
Unom
[V]
Coppia a rotore bloccato (stallo)
T0, 100K
[Nm]
1.5
2.9
Coppia nominale continuativa
Tnom, 100K
[Nm]
1.3
2.5
Coppia massima (picco)
Tp
[Nm]
4.5
9.0
Velocità nominale
nnom
[g/min]
3000
3000
Velocità massima
nmax
[g/min]
4000
4000
8
8
Numero di poli
400 V ac
BM 82 L - 30
230 V ac
400 V ac
Corrente a rotore bloccato (stallo)
I0, 100K
[A]
2.6
1.2
4.6
2.3
Corrente massima (picco)
Ip
[A]
7.2
3.7
14.7
7.4
Costante di tensione
kE
[V/1000 g/min]
39.0
76.5
39.5
78.0
Costante di coppia
kT
[Nm/A]
0.64
1.26
0.64
1.28
Costante di tempo termica
tth
[min]
Resistenza di avvolgimento
Rph
[Ω]
3.9
14.8
1.5
6.2
Induttanza di avvolgimento
LD
[mH]
28
105
13.8
56
Costante di tempo elettrica
tel
[ms]
7.1
8.9
Momento d’inerzia (senza freno)
Jmotore
[kg × m ]
0.638 × 10
1.030 × 10
Momento d’inerzia (con freno)
Jmotore BR
[kg × m2]
0.768 × 10-4
1.160 × 10-4
Coppia nominale del freno
TBR
[Nm]
6.5
6.5
16
16
7.1
2
-4
+ 5%
9
-4
Tensione di alimentazione freno
UBR
[V]
Potenza assorbita bobina
PBR
[W]
23.8
23.8
Ritardo all’inserzione del freno
tBR
[ms]
45
45
Ritardo al rilascio del freno
t-BR
[ms]
10
10
Carico radiale ammissibile sull‘albero
FR
[N]
400
400
Carico assiale ammissibile sull‘albero
FN
[N]
130
130
Massa senza freno / massa con freno
m
[kg]
2.0 (3.7)
3.3 / 5.0
8
24 V dc - 10 %
24 V dc
+ 5%
- 10 %
Servomotori Brushless Linearmech
1.
1.4
Servomotori brushless Serie BM
Caratteristiche tecniche
Grandezza servomotore
BM 102 S - 30 BM 102 L6 - 30 BM 102 L8 - 30
230 V ac
400 V ac
230 V ac
400 V ac
230 V ac
400 V ac
[V]
Unom
Tensione nominale drive
5.2
7.3
9.0
[Nm]
T0, 100K
Coppia a rotore bloccato (stallo)
4.1
6.4
6.7
[Nm]
Tnom, 100K
Coppia nominale continuativa
15.0
22.0
30.0
[Nm]
Tp
Coppia massima (picco)
3000
3000
3000
[g/min]
nnom
Velocità nominale
4000
4000
4000
[g/min]
nmax
Velocità massima
8
6
8
Numero di poli
6.5
3.5
9.8
6.1
11.5
5.8
[A]
I0, 100K
Corrente a rotore bloccato (stallo)
26.0
14.0
35.5
22.0
47.0
25.5
[A]
Ip
Corrente massima (picco)
48.6
90.0
47.7
77.0
47.7
94.0
[V/1000 g/min]
kE
Costante di tensione
0.8
1.48
0.8
1.2
0.8
1.55
[Nm/A]
kT
Costante di coppia
[min]
tth
Costante di tempo termica
35
45
45
0.9
3.5
0.56
1.6
0.4
1.6
[Ω]
Rph
Resistenza di avvolgimento
14.0
54.0
8.2
23.0
6.0
27.6
[mH]
LD
Induttanza di avvolgimento
15.5
15.4
14.6
14.3
15.0
17.2
[ms]
tel
Costante di tempo elettrica
-4
2.88 × 10
4.950 × 10
4.950 × 10
[kg × m ]
Jmotore
Momento d’inerzia (senza freno)
3.34 × 10-4
5.410 × 10-4
5.410 × 10-4
[kg × m2]
Jmotore BR
Momento d’inerzia (con freno)
14
14
14
[Nm]
TBR
Coppia nominale del freno
[V]
UBR
Tensione di alimentazione freno
-4
-4
+ 5%
+ 5%
24 V dc - 10 %
24 V dc - 10 %
24 V dc
+ 5%
- 10 %
2
35.2
35.2
35.2
[W]
PBR
Potenza assorbita bobina
50
50
50
[ms]
tBR
Ritardo all’inserzione del freno
15
15
15
[ms]
t-BR
Ritardo al rilascio del freno
500
500
500
[N]
FR
Carico radiale ammissibile sull‘albero
150
150
150
[N]
FN
Carico assiale ammissibile sull‘albero
5.2 / 7.4
7.8 / 10.0
7.8 / 10.0
[kg]
m
Massa senza freno / massa con freno
www.linearmech.it
9
Servomotori brushless Serie BM
Dimensioni e prestazioni
1.5.1
BM 45 L
57.5
L2
O 4.5
(n.2 fori a 180°)
Albero
cilindrico
C
O 40 h7
O 9 j6
1.5
66
1.
O 50 ±0.1
2.5
7
22.5
L1
BM 45 L CN - Servomotore con connettori
BM 45 L CN
BM 45 L B CN
(con freno)
L1
122
156
L2
45
78
Grandezza
Linguetta 3×3×15
L2
O 4.5
(n.2 fori a 180°)
Albero
cilindrico
C
O 40 h7
O 9 j6
57.5
Lunghezza
cavi motore
0.3 m
63
O 9 j6
Albero con
linguetta
L
22.5
q 45
O 50 ±0.1
2.5
7
22.5
L1
Albero con
linguetta
L
q 45
BM 45 L CV - Servomotore con cavi
BM 45 L CV
BM 45 L B CV
(con freno)
L1
122
156
L2
45
78
O 9 j6
Grandezza
10
22.5
Linguetta 3×3×15
Servomotori Brushless Linearmech
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.1
BM 45 L
Si riporta di seguito le curva caratteristica di funzionamento del servomotorie dove:
•
Tnom [Nm] = coppia nominale continuativa
•
Tp [Nm] = coppia massima (di picco)
Per ulteriori chiarimenti sul significato delle diciture precedenti, consultare l’appendice A “Definizioni” a
pag. 43.
Per conoscere le condizioni di prova con cui sono state ricavate queste curve, consultare l’appendice B
“Condizioni di prova” a pag. 44.
T [Nm]
1.25
1.00
0.75
T [Nm]
Tp
p [[Nm]]
0.50
0.25
0.00
0
www.linearmech.it
1000
2000
3000
n [rpm]
11
1.
Servomotori brushless Serie BM
Dimensioni e prestazioni
1.5.2
BM 63 S
57.5
L2
O 5.5
(n.4 fori a 90°)
73
Albero
cilindrico
C
O 50 h7
O 14 j6
1.5
O 75 ±0.1
2.5
8
30
L1
q 63
BM 63 S CN - Servomotore con connettori
Albero con
linguetta
L
BM 63 S CN
BM 63 S B CN
(con freno)
L1
123
164
L2
44
85
O 14 j6
Grandezza
Linguetta 5×5×25
30
L2
Lunghezza
cavi motore
0.3 m
O 5.5
(n.4 fori a 90°)
70.5
Albero
cilindrico
C
O 50 h7
O 14 j6
57.5
O 75 ±0.1
2.5
8
30
L1
BM 63 S CV - Servomotore con cavi
Albero con
linguetta
L
12
BM 63 S CV
BM 63 S B CV
(con freno)
L1
123
164
L2
44
85
Grandezza
O 14 j6
30
q 63
Linguetta 5×5×25
Servomotori Brushless Linearmech
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.2
BM 63 S
Si riporta di seguito le curva caratteristica di funzionamento del servomotore dove:
•
Tnom [Nm] = coppia nominale continuativa
•
Tp [Nm] = coppia massima (di picco)
Per ulteriori chiarimenti sul significato delle diciture precedenti, consultare l’appendice A “Definizioni” a
pag. 43.
Per conoscere le condizioni di prova con cui sono state ricavate queste curve, consultare l’appendice B
“Condizioni di prova” a pag. 44.
T [Nm]
2.50
2.00
1.50
T [Nm]
Tp
p [Nm]
[
]
1.00
0.50
0.00
0
www.linearmech.it
1000
2000
3000
n [rpm]
13
1.
Servomotori brushless Serie BM
Dimensioni e prestazioni
1.5.3
BM 63 L
82.5
L2
O 5.5
(n.4 fori a 90°)
73
Albero
cilindrico
C
O 50 h7
O 14 j6
1.5
O 75 ±0.1
2.5
8
30
q 63
L1
BM 63 L CN - Servomotore con connettori
Albero con
linguetta
L
BM 63 L CN
BM 63 L B CN
(con freno)
L1
148
189
L2
44
85
O 14 j6
Grandezza
Linguetta 5×5×25
30
Lunghezza
cavi motore
0.3 m
L2
O 5.5
(n.4 fori a 90°)
70.5
Albero
cilindrico
C
O 50 h7
O 14 j6
82.5
O 75 ±0.1
2.5
8
30
L1
BM 63 L CV - Servomotore con cavi
Albero con
linguetta
L
14
BM 63 L CV
BM 63 L B CV
(con freno)
L1
148
189
L2
44
85
Grandezza
O 14 j6
30
q 63
Linguetta 5×5×25
Servomotori Brushless Linearmech
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.3
BM 63 L
Si riporta di seguito la curva caratteristica di funzionamento del servomotore, dove:
•
Tnom [Nm] = coppia nominale continuativa
•
Tp [Nm] = coppia massima (di picco)
Per ulteriori chiarimenti sul significato delle diciture precedenti, consultare l’appendice A “Definizioni” a
pag. 43.
Per conoscere le condizioni di prova con cui sono state ricavate queste curve, consultare l’appendice B
“Condizioni di prova” a pag. 44.
T [Nm]
4.80
4.20
3.60
3.00
T [Nm]
2.40
Tp
p [[Nm]]
1.80
1.20
0.60
0.00
0
www.linearmech.it
1000
2000
3000
n [rpm]
15
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.4
BM 82 S CN - Servomotore con connettori
68.5
L2
O 5.5
(n.4 fori a 90°)
O 70 h7
O 19 j6
84
Albero
cilindrico
C
O 100 ±0.1
3
10
40
q 82
Albero con
linguetta
L
BM 82 S CN
BM 82 S B CN
(con freno)
L1
134
192
L2
44
102
O 19 j6
Grandezza
Linguetta 6×6×20
40
Si riporta di seguito la curva caratteristica di funzionamento del servomotore, dove:
•
Tnom [Nm] = coppia nominale continuativa
•
Tp [Nm] = coppia massima (di picco)
Per ulteriori chiarimenti sul significato delle diciture precedenti, consultare l’appendice A “Definizioni” a
pag. 43.
Per conoscere le condizioni di prova con cui sono state ricavate queste curve, consultare l’appendice B
“Condizioni di prova” a pag. 44.
T [Nm]
4.80
4.20
3.60
3.00
T [Nm]
2.40
Tp
p [[Nm]]
1.80
1.20
0.60
0.00
0
16
1000
2000
3000
n [rpm]
Servomotori Brushless Linearmech
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.5
BM 82 L CN - Servomotore con connettori
93.5
L2
O 5.5
(n.4 fori a 90°)
O 70 h7
O 19 j6
84
Albero
cilindrico
C
O 100 ±0.1
3
10
40
q 82
L1
Albero con
linguetta
L
BM 82 L CN
BM 82 L B CN
(con freno)
L1
159
217
L2
44
102
O 19 j6
Grandezza
40
Linguetta 6×6×20
Si riporta di seguito la curva caratteristica di funzionamento dei servomotori, dove:
•
Tnom [Nm] = coppia nominale continuativa
•
Tp [Nm] = coppia massima (di picco)
Per ulteriori chiarimenti sul significato delle diciture precedenti, consultare l’appendice A “Definizioni” a
pag. 43.
Per conoscere le condizioni di prova con cui sono state ricavate queste curve, consultare l’appendice B
“Condizioni di prova” a pag. 44.
T [Nm]
10.00
9.00
8.00
7.00
6.00
T [Nm]
5.00
Tp
p [[Nm]]
4.00
3.00
2.00
1.00
0.00
0
www.linearmech.it
1000
2000
3000
n [rpm]
17
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.6
BM 102 S CN - Servomotore con connettori
104.5
L2
16
O 24 j6
O 90 h7
3.5
94
O9
(n.4 fori a 90°)
Albero
cilindrico
C
O 115 ±0.1
50
q 102
L1
Albero con
linguetta
L
BM 102 S CN
BM 102 S B CN
(con freno)
L1
176
230
L2
50
104
O 24 j6
Grandezza
50
Linguetta 8×7×40
Si riporta di seguito la curva caratteristica di funzionamento del servomotore, dove:
•
Tnom [Nm] = coppia nominale continuativa
•
Tp [Nm] = coppia massima (di picco)
Per ulteriori chiarimenti sul significato delle diciture precedenti, consultare l’appendice A “Definizioni” a
pag. 43.
Per conoscere le condizioni di prova con cui sono state ricavate queste curve, consultare l’appendice B
“Condizioni di prova” a pag. 44.
T [Nm]
18.00
16.50
15.00
13.50
12.00
10.50
T [Nm]
9.00
Tp
p [[Nm]]
7.50
6.00
4.50
3.00
1.50
0.00
0
18
1000
2000
3000
n [rpm]
Servomotori Brushless Linearmech
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.7
BM 102 L6 CN - Servomotore con connettori
154.5
L2
16
O9
(n.4 fori a 90°)
94
Albero
cilindrico
C
90
O 24 j6
3.5
O 115 ±0.1
q 102
Albero con
linguetta
L
BM 102 L6 CN
BM 102 L6 B CN
(con freno)
L1
226
280
L2
50
104
O 24 j6
Grandezza
50
Linguetta 8×7×40
Si riporta di seguito la curva caratteristica di funzionamento del servomotore, dove:
•
Tnom [Nm] = coppia nominale continuativa
•
Tp [Nm] = coppia massima (di picco)
Per ulteriori chiarimenti sul significato delle diciture precedenti, consultare l’appendice A “Definizioni” a
pag. 43.
Per conoscere le condizioni di prova con cui sono state ricavate queste curve, consultare l’appendice B
“Condizioni di prova” a pag. 44.
T [Nm]
24.00
22.00
20.00
18.00
16.00
14.00
T [Nm]
12.00
Tp
p [[Nm]]
10.00
8.00
6.00
4.00
2.00
0.00
0
www.linearmech.it
1000
2000
3000
n [rpm]
19
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.8
BM 102 L8 CN - Servomotore con connettori
154.5
L2
16
O9
(n.4 fori a 90°)
94
Albero
cilindrico
C
90
O 24 j6
3.5
O 115 ±0.1
q 102
Albero con
linguetta
L
BM 102 L8 CN
BM 102 L8 B CN
(con freno)
L1
226
280
L2
50
104
O 24 j6
Grandezza
50
Linguetta 8×7×40
Si riporta di seguito la curva caratteristica di funzionamento del servomotore, dove:
•
Tnom [Nm] = coppia nominale continuativa
•
Tp [Nm] = coppia massima (di picco)
Per ulteriori chiarimenti sul significato delle diciture precedenti, consultare l’appendice A “Definizioni” a
pag. 43.
Per conoscere le condizioni di prova con cui sono state ricavate queste curve, consultare l’appendice B
“Condizioni di prova” a pag. 44.
T [Nm]
33.00
30.00
27.00
24.00
21.00
T [Nm]
18.00
Tp
p [[Nm]]
15 00
15.00
12.00
9.00
6.00
3.00
0.00
0
20
1000
2000
3000
n [rpm]
Servomotori Brushless Linearmech
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.9
BM 45 L IEC
57.5
L2
O 65 ±0.1
Linguetta 3×3×15
O 50 h7
O 9 j6
66
M5
(n.4 fori a 90°)
2.5
7
22.5
L1
O 80
BM 45 L IEC CN - Servomotore con connettori
NOTA: per la curva caratteristica
di funzionamento vedere par. 1.5.1
a pag. 11
BM 45 L IEC CN
BM 45 L IEC B CN
(con freno)
L1
122
156
L2
45
78
Grandezza
57.5
Lunghezza
cavi motore
0.3 m
L2
O 65 ±0.1
O 50 h7
O 9 j6
63
M5
(n.4 fori a 90°)
Linguetta 3×3×15
2.5
7
22.5
NOTA: per la curva caratteristica
di funzionamento vedere par. 1.5.1
a pag. 11
www.linearmech.it
L1
O 80
BM 45 L IEC CV - Servomotore con cavi
BM 45 L IEC CV
BM 45 L IEC B CV
(con freno)
L1
122
156
L2
45
78
Grandezza
21
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.10
BM 63 S IEC
57.5
L2
O 75 ±0.1
O 60 h7
O 11 j6
73
M5
(n.4 fori a 90°)
Linguetta 4×4×18
2.5
8
23
L1
O 90
BM 63 S IEC CN - Servomotore con connettori
NOTA: per la curva caratteristica
di funzionamento vedere par. 1.5.2
a pag. 13
57.5
BM 63 S IEC CN
BM 63 S IEC B CN
(con freno)
L1
123
164
L2
44
85
Grandezza
L2
Lunghezza
cavi motore
0.3 m
O 75 ±0.1
Linguetta 5×5×25
O 60 h7
O 11 j6
70.5
M5
(n.4 fori a 90°)
2.5
8
23
L1
O 90
BM 63 S IEC CV - Servomotore con cavi
NOTA: per la curva caratteristica
di funzionamento vedere par. 1.5.2
a pag. 13
22
BM 63 S IEC CV
BM 63 S IEC B CV
(con freno)
L1
123
164
L2
44
85
Grandezza
Servomotori Brushless Linearmech
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.11
BM 63 L IEC
82.5
L2
O 85 ±0.1
M6
(n.4 fori a 90°)
O 70 h7
O 14 j6
73
Linguetta 5×5×25
2.5
8
30
L1
O 105
BM 63 L IEC CN - Servomotore con connettori
NOTA: per la curva caratteristica
di funzionamento vedere par. 1.5.3
a pag. 15
BM 63 L IEC CN
BM 63 L IEC B CN
(con freno)
L1
148
189
L2
44
85
Grandezza
L2
82.5
Lunghezza
cavi motore
0.3 m
O 85 ±0.1
M6
(n.4 fori a 90°)
O 61.45 h7
O 14 j6
70.5
Linguetta 5×5×25
2.5
8
30
L1
O 105
BM 63 L IEC CV - Servomotore con cavi
NOTA: per la curva caratteristica
di funzionamento vedere par. 1.5.3
a pag. 15
www.linearmech.it
BM 63 L IEC CV
BM 63 L IEC B CV
(con freno)
L1
148
189
L2
44
85
Grandezza
23
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.12
BM 82 S IEC CN
68.5
L2
O 100 ±0.1
O6
O 80 h7
O 19 j6
84
Linguetta 6×6×20
3
10
40
L1
O 120
1.5.13
BM 82 S IEC CN
BM 82 S IEC B CN
(con freno)
L1
134
192
L2
44
102
Grandezza
NOTA: per la curva caratteristica
di funzionamento vedere par 1.5.4
a pag. 16
BM 82 L IEC CN
93.5
L2
O 100 ±0.1
O6
O 80 h7
O 19 j6
84
Linguetta 6×6×20
3
10
40
NOTA: per la curva caratteristica
di funzionamento vedere par. 1.5.5
a pag. 17
24
L1
O 120
BM 82 L IEC CN
BM 82 L IEC B CN
(con freno)
L1
159
217
L2
44
102
Grandezza
Servomotori Brushless Linearmech
1.
Servomotori brushless Serie BM
1.5
Dimensioni e prestazioni
1.5.14
BM 102 S IEC CN
104.5
L2
O 115 ±0.1
16
3.5
M8
O 95 h7
O 24 j6
94
Linguetta 8×7×40
50
L1
O 140
NOTA: per la curva caratteristica
di funzionamento vedere par. 1.5.6
a pag. 18
1.5.15
BM 102 L6 IEC CN
BM 102 L8 IEC CN
BM 102 S IEC CN
BM 102 S IEC B CN
(con freno)
L1
176
230
L2
50
104
Grandezza
154.5
L2
16
O 115 ±0.1
3.5
M8
O 95 h7
O 24 j6
94
Linguetta 8×7×40
50
L1
NOTA: per le curve caratteristiche Grandezza
di funzionamento vedere i par. 1.5.7
a pag. 19 e 1.5.8 a pag. 20
www.linearmech.it
O 140
BM 102 L6 IEC CN
BM 102 L8 IEC CN
BM 102 L6 IEC B CN
BM 102 L8 IEC B CN
(con freno)
L1
226
280
L2
50
104
25
1.
1.6
Servomotori brushless Serie BM
Feedback motore
E01: encoder incrementale ottico
Tensione alimentazione
[V dc]
5V ± 5%
Corrente di alimentazione max
[mA]
200
Risoluzione standard
[impulsi / giro]
2000
Tipo elettronica
[-]
Line Driver
Frequenza massima
[kHz]
200
Segnali incrementali ( 3 differenziali )
[-]
A,A/ - B,B/ - Z,Z/
Segnali commutazione ( 3 differenziali )
[-]
HU,HU/ - HV,HV/ - HW,HW/
Temperatura di lavoro
[°C]
-20 ... +85
Velocità massima
[g/min]
6000
R01: resolver
Tensione alimentazione
[V rms]
7 @ 10KHz
Rapporto di trasformazione
[-]
0.5 ± 5%
Numero coppie polari
[-]
1
Errore elettrico
[-]
± 10' max
Temperatura di lavoro
[°C]
-55 ... +155
Massima velocità
[g/min]
10000
A01: encoder assoluto multigiro BISS
26
+ 10 %
Tensione alimentazione
[V dc]
5V
Assorbimento corrente
[mA]
150
Risoluzione sul singolo giro
[-]
12-19 bit
Risoluzione multigiro
[-]
12 bit
Interfaccia seriale
[-]
BISS
Connessione
[-]
Clock and Data RS422
Segnali incrementali
[-]
Sin Cos 1Vpp
Risoluzione
[impulsi / giro]
2048
Temperatura di lavoro
[°C]
-40 ... +120
Massima velocità
[g/min]
10000
-5%
Servomotori Brushless Linearmech
1.
1.7
Servomotori brushless Serie BM
Protettori termici
01: termistore PTC
Idoneo per sovraccarichi rapidi, non misura la temperatura
Tipo di segnale
[-]
Resistenza non lineare
Tensione nominale
[V dc]
7,5
Massima tensione
[V dc]
30
Tensione d'isolamento
[kV]
2,5
Temperatura d‘intervento (standard)
[°C]
140
Resistenza @ 135°C
[Ω]
≤ 550
Resistenza @ 145°C
[Ω]
≥1330
Resistenza @ 155°C
[Ω]
≥4000
02: protettore termico bimetallico PTO
Idoneo per sovraccarichi prolungati nel tempo, non misura la temperatura
Tipo di segnale
[-]
Contatto normalmente chiuso
Temperatura intervento
[°C]
140
Temperatura di ripristino
[°C]
110 ± 15
Tensione alimentazione
[V]
250
Corrente nominale
[A]
2,5
Tensione isolamento
[kV]
2
03: KTY84-130
Monitoraggio della temperatura
Misura della temperatura
SI
Tipo di segnale
[-]
Resistenza lineare
Corrente continuativa
[mA]
2
Temperatura operativa
[°C]
-40 ... +300
Resistenza @100°C, 2mA
[Ω]
min 970 max 1030
Rapporto resistenze R100°C/R25°C
[-]
min 0.595 max 0.611
Rapporto resistenze R250°C/R100°C
min 2.111 max 2.221
NOTA: gli azionamenti della linea ECO che Linearmech fornisce insieme ai suoi servomotori supportano
solamente la protezione termica 02 (PTO).
PTC
PTO
R[Ω]
R[Ω]
I [A]
T [°C]
www.linearmech.it
KTY
T [°C]
T [°C]
27
1.
Servomotori brushless Serie BM
1.8
Connessioni motore
1.8.1
BM 45 / 63 CN - Connettori M17
POTENZA M17 7 POLI
Pin
Funzione
1
Fase U
2
Fase V
3
-
PE
4
Freno +
5
Freno -
6
Fase W
5
4
6 E
3
Pin
E01: Encoder
Incrementale
R01: Resolver
A01: Encoder
assoluto BISS
1
CHB
Sin+
DATA
2
CHB/
Sin-
DATA/
3
Z
-
A+
4
HU
-
B+
5
HW
-
DC 5V
6
-
-
-
7
OV enc
R2
0V sensor
8
PT (opzionale)
PT (opzionale)
PT (opzionale)
9
PT (opzionale)
PT (opzionale)
PT (opzionale)
10
5 V enc
R1
5V sensor
11
CHA/
Cos-
CLOCK/
12
CHA
Cos+
CLOCK
13
Z/
-
A-
14
HU/
-
B-
15
HV/
-
-
16
HV
-
-
17
HW/
-
0V Un
Orientamento connettori
1
2
12 1 2
11 13 3
10 17 E 14 4
9 16 15 5
8 7 6
28
SEGNALE M17 17 POLI
POTENZA
I connettori hanno la possiblità di ruotare per essere
orientati opportunamente. In figura è rappresentato il
range angolare di orientamento.
SEGNALE
Servomotori Brushless Linearmech
1.
Servomotori brushless Serie BM
1.8
Connessioni motore
1.8.2
BM 45 / 63 CV - Cavi non terminati
POTENZA
Colore filo
Bianco
Nero
SEGNALE
Funzione
Fase U
Fase V
Giallo - Verde
Rosso 0,5 mm2
Nero 0,5 mm2
Rosso
Freno +
Freno -
Fase W
E01: Encoder Incrementale
R01: Resolver
Colore filo
Funzione
Colore filo
Funzione
Verde
CHB
Giallo
Sin+
Verde / Nero
CHB/
Blu
Sin-
Giallo
Z
-
-
Marrone
HU
-
-
Bianco
HW
-
-
-
-
-
-
Nero
0V ENC
Giallo/Bianco o Nero/Bianco
R2
-
-
-
-
-
-
-
-
Rosso
+5V ENC
Bianco/Rosso
R1
Blu
CHA/
Nero
Cos-
Blu / Nero
CHA
Rosso
Cos+
Giallo / Nero
Z/
-
-
Marrone / Nero
HU/
-
-
Grigio / Nero
HV/
-
-
Grigio
HV
-
-
Bianco / Nero
HW/
-
-
NOTA: Connessioni con cavi non terminati disponibili solo con alimentazione in DC 24/48 V dc.
www.linearmech.it
29
1.
Servomotori brushless Serie BM
1.8
Connessioni motore
1.8.3
BM 82 / 102 CN - Connettori M23
SEGNALE M23 17 POLI
POTENZA M23 6 POLI
Pin
Funzione
1
Fase U
2
Fase V
PE
4
Freno +
5
Freno -
6
Fase W
6
Fase W
6
5
4
11 1
10 12 2
9 16 17 E 13 3
8 15 14 4
7 6 5
30
E01: Encoder
Incrementale
R01: Resolver
A01: Encoder
assoluto BISS
1
CHB
Sin+
DATA
2
CHB/
Sin-
DATA/
3
Z
-
A+
4
HU
-
B+
5
HW
-
DC5V / 7-30V
6
-
-
-
7
OV enc
R2
0V sensor
8
PT (opzionale)
PT (opzionale)
PT (opzionale)
9
PT (opzionale)
PT (opzionale)
PT (opzionale)
10
5 V enc
R1
5V sensor
11
CHA/
Cos-
CLOCK/
12
CHA
Cos+
CLOCK
13
Z/
-
A-
14
HU/
-
B-
15
HV/
-
-
16
HV
-
-
17
HW/
-
0V Un
Orientamento connettori
2
1
Pin
POTENZA
I connettori hanno la possiblità di ruotare per essere
orientati opportunamente. In figura è rappresentato il range
angolare di orientamento.
SEGNALE
Servomotori Brushless Linearmech
2.
Azionamenti
Oltre ai servomotori brushless sono previsti anche gli azionamenti dedicati. In questo modo Linearmech è in
grado di fornire il pacchetto completo, con l’evidente vantaggio per il cliente di avere un unico referente dal
momento della selezione fino all’avviamento degli assi. Questa è una garanzia di successo dell’applicazione.
2.1
Caratteristiche generali
I drives della Serie ECO abbinati ai servomotori Linearmech sono prodotti interamente digitali (Full Digital)
ottimizzati per il controllo di motori a caratteristica sinusoidale.
Il controllo implementato (denominato Field Oriented Control), permette di ottenere elevate precisioni
di movimento e la possibilità di regolare tutte le grandezze che caratterizzano un movimento quali
Coppia, Velocità e Posizione.
Le funzioni MECCATRONICHE implementate all’interno del drive permettono di gestire profili di movimento
anche complessi con semplici comandi digitali / seriali.
Le modalità di gestione del drive e i suoi modi operativi sono i seguenti:
CONTROLLO DI COPPIA
•
riferimento analogico 0 ÷ 10V
•
gestione tramite accesso ai registri interni del drive (reti di campo)
CONTROLLO DI VELOCITA’
•
riferimento analogico ± 10V
•
gestione tramite accesso ai registri interni del drive (reti di campo)
CONTROLLO POSIZIONE
•
SAP (Stand Alone Positioning)
•
MSQ (Motion Sequencer)
•
Asse Elettrico
•
Reti di campo Ethercat (CoE)
Canopen (DS402)
RS422/485 (SNET @19200 Baud)
Modbus RTU (@19200 Baud)
Di serie è disponibile la porta seriale RS 422 che consente di connettere tutti i drive ad un PC attraverso una
linea seriale.
Mediante l’ausilio del software applicativo “DRIVE WATCHER“ è possibile gestire le fasi di impostazioni e
debug. Il programma consente inoltre di effettuare un’analisi approfondita non solo delle grandezze del drive
ma anche di tutto il sistema dinamico, compreso attuatore e carico.
Tramite l’utility del programma è possibile monitorare sotto forma grafica e memorizzare le grandezze rilevate
durante il ciclo quali corrente, velocità, tensioni ecc. , consentendo una perfetta analisi della coppia richiesta
dal sistema al fine di ottenere una ottimizzazione del dimensionamento.
Di seguito vengono riportate le informazioni generali di ogni singola modalità di funzionamento. Per le
caratteristiche complete si faccia riferimento ai manuali specifici.
www.linearmech.it
31
2.
2.2
Azionamenti
SAP (Stand Alone Positioning)
Questa funzionalità permette di ottenere un sistema di posizionamento completamente indipendente.
Attraverso la selezione d’ingressi digitali è possibile richiamare quote TARGET precedentemente impostate
all’interno del drive mediante l’apposito tool software “DRIVE WATCHER“.
Con questo sistema è possibile eseguire i seguenti movimenti indicizzati:
•
movimento con registrazione posizione rispetto all’ingresso di un sensore (AZZERAMENTO)
•
movimento con posizione ASSOLUTA rispetto posizione riferimento
•
movimento con posizione RELATIVA rispetto alla posizione corrente
Modalità di funzionamento SAP
Posizione 1
Ingressi
digitali
Posizione 2
Posizione n
Interfaccia applicativa per configurare asse nella modalità di funzionamento SAP
32
Servomotori Brushless Linearmech
2.
2.3
Azionamenti
MSQ (Motion Sequencer - Sequenziatore di movimenti)
La funzione MSQ permette di collegare tra loro una sequenza di movimenti autonomi per gestire, anche
senza l’ausilio del PLC, applicazioni complesse.
Con questo sistema è possibile eseguire i seguenti movimenti indicizzati:
•
movimento con registrazione posizione rispetto all’ingresso di un sensore (AZZERAMENTO)
•
movimento con posizione ASSOLUTA rispetto posizione riferimento
•
movimento con posizione RELATIVA rispetto alla posizione corrente
•
indicizzazione movimento
•
attivazione movimento dopo conteggio
•
attivazione movimento da segnale esterno
Modalità di funzionamento MSQ
Posizione 1
Posizione 2
Posizione n
Interfaccia applicativa per configurare asse nella modalità di funzionamento MSQ
www.linearmech.it
33
2.
2.4
Azionamenti
Asse elettrico
Questa funzione permette di vincolare il movimento del servomotore (SLAVE) al movimento di un motore
(encoder Master) esterno con la possibilità di impostare un determinato rapporto di trasmissione attraverso
un parametro.
Modalità di funzionamento ASSE ELETTRICO
2.5
Reti di campo
Le reti di campo permettono di gestire le funzioni dell’azionamento attraverso uno scambio d’informazioni
in modalità seriale con un sistema MASTER.
La flessibilità è ottenuta dalla possibilità di modificare i parametri, inviare un setpoint di velocità o di spazio o
di agganciare funzioni meccatroniche specifiche.
La ridotta necessità di cablaggio si realizza collegando più drive alla stessa connessione seriale. La differenza
tra una rete di campo ed un’altra è data dalla velocità di comunicazione, dal numero di funzioni gestibili e
dagli standard.
ETHERCAT
Per adattarsi al nuovo standard delle applicazioni industriali è stato reso disponibile il bus di campo Ethercat.
Questo bus permette un’altissima velocità di comunicazione tale da rendere real-time la caratteristica degli
azionamenti; con questa modalità operativa è possibile soddisfare tutte quelle applicazioni che richiedono
la gestione di un alto numero di assi e particolari esigenze dinamico/prestazionali .
Ethercat è un protocollo di comunicazione industriale ad alte prestazioni che amplia lo standard IEEE 802.3
Ethernet, consentendo il trasferimento dei dati con una temporizzazione prevedibile ed una sincronizzazione
estremamente precisa. Tutti i dati vengono trasportati all’interno del frame standard Ethernet senza che sia
modificata la sua struttura di base.
Per questo motivo il collegamento in una rete Ethercat dell’azionamento avviene tramite un connettore RJ45
il cui cablaggio rispetta gli standard Ethernet / IEEE 802.3 10Base-T, 100Base-TX e1000Base.
Nel caso degli azionamenti della Serie ECO il protocollo Ethercat implementato è Ethercat (CoE) cioè
CANopen over EtherCAT.
CAN OPEN
CANopen è un’applicazione standardizzata per i sistemi di automazione distribuita basate su CAN (Controller
Area Network) che offre le seguenti caratteristiche prestazionali:
•
Trasmissione di dati critici di processo secondo il principio produttore – consumatore
•
Descrizione standardizzata del dispositivo (dati, parametri, funzioni, programmi) nella forma del cosiddetto
“dizionario degli oggetti”
•
Servizi standardizzati per il monitoraggio del dispositivo, segnalazione di errore (messaggi di emergenza)
e coordinamento della rete (“network management”)
Il protocollo implementato fa riferimento allo standard CiA CANopen- Device Profile Drives and Motion
Control – DSP 402 v1.1.
RS422/485 - MODBUS RTU
Queste reti hanno la caratteristica di essere flessibili ma non veloci e pertanto si prestano ad essere utilizzate
per cambio parametri, cambio registri di posizionamento e lancio di funzioni meccatroniche integrate.
34
Servomotori Brushless Linearmech
2.
2.6
Azionamenti
Modelli e funzionalità
CARATTERISTICHE ELETTRICHE
Modello
Corrente
Corrente di
Tensione di
nominale
[A]
picco [A]
alimentazione
[V]
(valore RMS) (valore RMS)
FUNZIONI MECCATRONICHE
SAP
MSQ
Analogica
Reti di
campo
Asse elettrico
MICROECO
•
24 ... 48 V dc
10
20
•
•
(NO Ethercat)
10-20
MINIECO
3
6
3-6
•
230 V ac
•
(NO Ethercat)
MINIECO PLUS
4
8
4-8
ECO 2D
4
10
•
4-10
230 V ac
•
•
•
(Ethercat
ECO 2D
opzionale)
6
15
6-15
ECO 4D
4
10
4-10
•
ECO 4D
400 V ac
5
13
•
•
•
(Ethercat
5-13
opzionale)
ECO 4D
10
20
10-20
NOTA: la scheda opzionale per il collegamento del drive in una rete su base Ethernet con protocollo
Ethercat (CoE) è disponibile sulla serie ECO2D ed ECO4D.
2.7
Trasduttori utilizzabili
CARATTERISTICHE ELETTRICHE
Modello
FEEDBACK SUPPORTATI
Encoder
Corrente
Corrente di incrementale 5V
Tensione di
picco [A] LD con sensori di
alimentazione nominale [A]
[V]
(valore RMS) (valore RMS) commutazione
E01
MICROECO
24 ... 48 V dc
10-20
MINIECO
3-6
230 V ac
MINIECO PLUS
4-8
ECO 2D
4-10
230 V ac
ECO 2D
6-15
ECO 4D
4-10
ECO 4D
400 V ac
5-13
ECO 4D
10-20
10
20
3
6
4
8
4
10
6
15
4
10
5
13
10
20
Resolver
R01
Encoder assoluto
multigiro con
protocollo BISS
A01
•
-
-
•
-
opzionale
•
opzionale
opzionale
•
opzionale
opzionale
NOTA: l’utilizzo del RESOLVER o dell’ENCODER ASSOLUTO comporta l’implementazione di una scheda
aggiuntiva all’interno del drive quindi il loro utilizzo deve essere specificato.
www.linearmech.it
35
2.
2.8
Azionamenti
Abbinamenti consigliati: servomotori e azionamenti
Si riportano di seguito gli accoppiamenti idonei servomotori - azionamenti e le prestazioni ottenibili, con
avvolgimenti standard per i motori e con una velocità di rotazione nominale di 3000 g/min.
ATTENZIONE: i diagrammi di prestazioni al cap. 1.5 sono riferiti alle prestazioni massime erogabili dal
servomotore. Bisogna tenere in considerazione gli eventuali declassamenti di prestazioni legati alla scelta
dell’azionamento, come specificato in tabella.
BM 45 L
BM 63 S
BM 63 L
[Nm]
0.35
0.44
0.38
24 V dc Tnom, 100K [Nm]
0.32
0.34
0.35
Tp
[Nm]
0.86
0.82
0.76
T0, 100K
[Nm]
0.35
0.70
0.89
48 V dc Tnom, 100K [Nm]
0.32
0.60
0.84
Tp
[Nm]
1.05
1.65
1.67
T0, 100K
[Nm]
0.35
0.70
1.35
1.50
Tnom, 100K [Nm]
0.32
0.60
1.30
1.30
Tp
[Nm]
1.05
2.10
3.80
3.10
T0, 100K
[Nm]
0.35
0.70
1.35
1.50
Tnom, 100K [Nm]
0.32
0.60
1.30
1.30
Tp
[Nm]
1.05
2.10
4.20
4.10
T0, 100K
[Nm]
0.35
0.70
1.35
1.50
Tnom, 100K [Nm]
0.32
0.60
1.30
1.30
Tp
[Nm]
1.05
2.10
4.20
4.50
T0, 100K
[Nm]
T0, 100K
MINIECO
10-20
MINIECO
3-6
230 V ac
MINIECO
PLUS
4-8
ECO 2D
4-10
230 V ac
ECO 2D
6-15
ECO 4D
4-10
ECO 4D
5-13
ECO 4D
10-20
36
BM 82 S
Tnom, 100K [Nm]
Tp
[Nm]
T0, 100K
[Nm]
1.50
Tnom, 100K [Nm]
1.30
Tp
[Nm]
4.50
T0, 100K
[Nm]
400 V ac Tnom, 100K [Nm]
Tp
[Nm]
T0, 100K
[Nm]
Tnom, 100K [Nm]
Tp
[Nm]
Servomotori Brushless Linearmech
2.
2.8
Azionamenti
Abbinamenti consigliati: servomotori e azionamenti
Si riportano di seguito gli accoppiamenti idonei servomotori - azionamenti e le prestazioni ottenibili, con
avvolgimenti standard per i motori e con una velocità di rotazione nominale di 3000 g/min.
ATTENZIONE: i diagrammi di prestazioni ai cap. 1.5 sono riferiti alle prestazioni massime erogabili dal motore.
Bisogna tenere in considerazione gli eventuali declassamenti di prestazioni legati alla scelta dell’azionamento,
come specificato in tabella.
BM 82 L
BM 102 S
BM 102 L6
BM 102 L8
[Nm]
T0, 100K
[Nm] Tnom, 100K 24 V dc
[Nm]
Tp
[Nm]
T0, 100K
MINIECO
10-20
[Nm] Tnom, 100K 48 V dc
[Nm]
Tp
1.90
[Nm]
T0, 100K
1.52
[Nm] Tnom, 100K
3.65
[Nm]
Tp
2.50
[Nm]
T0, 100K
2.16
[Nm] Tnom, 100K
4.80
[Nm]
Tp
T0, 100K
MINIECO
3-6
230 V ac
MINIECO
PLUS
4-8
2.50
3.22
[Nm]
2.16
2.10
[Nm] Tnom, 100K
6.10
6.72
[Nm]
Tp
2.90
4.82
4.50
4.70
[Nm]
T0, 100K
2.50
3.70
3.90
2.50
[Nm] Tnom, 100K
9.00
10.10
9.30
11.80
[Nm]
Tp
2.90
5.20
4.80
6.20
[Nm]
T0, 100K
2.50
4.10
3.90
3.90
[Nm] Tnom, 100K
9.00
10.70
10.00
13.80
[Nm]
Tp
5.20
6.00
7.70
[Nm]
T0, 100K
4.10
5.10
5.45
[Nm] Tnom, 100K 400 V ac
13.90
13.00
17.50
[Nm]
Tp
5.20
7.30
9.00
[Nm]
T0, 100K
4.10
6.40
6.70
[Nm] Tnom, 100K
15.00
20.00
24.30
[Nm]
www.linearmech.it
Tp
ECO 2D
4-10
230 V ac
ECO 2D
6-15
ECO 4D
4-10
ECO 4D
5-13
ECO 4D
10-20
37
2.
Azionamenti
2.9Dimensioni
MICROECO
MINIECO, MINIECO Plus
ECO2D 4-10 A 230 V, ECO2D 6-15 A 230 V, ECO4D 4-10 A 400 V, ECO4D 5-13 A 400 V
AZIONAMENTO B1
ECO2D
4-10 A 230 V
ECO2D
6-15 A 230 V
ECO4D
4-10 A 400 V
ECO4D
5-13 A 400 V
B2 ∅ F F1
F2
H1
H2
P
68
62
4.5 37.5 179 168 186 150
67
4.5 42.5 220 210 227 190
82
73
87
ECO4D 10-20 A 400 V
38
Servomotori Brushless Linearmech
3.
Cavi di connessione
A richiesta possono essere forniti cablaggi già forniti dei connettori necessari per il collegamento di potenza
e di segnale dal servomotore all’azionamento. Questi cavi hanno lunghezza standard 5m.
3.1
Cavo di potenza
Materiale guaina esterna:
PVC - Classe 43 per UL 1581 e CSA 22.2 n°210
Colore arancio
Temperatura di esercizio:
in posa fissa senza sollecitazioni meccaniche esterne (- 40 ... + 80)°C
in posa mobile (- 10 ... + 80)°C
Raggio minimo di curvatura:
in posa fissa: 4 × diametro cavo
in posa mobile: 7.5 × diametro cavo
Velocità massima di spostamento
in posa mobile:
Accelerazione/decelerazione
massima:
Vita a fatica in posa mobile:
3 m/s
10 m/s2
Da 3 a 6 milioni di movimenti
Tensione di esercizio:
STYLE 2464: 300 V (UL) - U0/U 450/750 V
STYLE 2570: 1000 V (UL)
Normative di riferimento:
CSA 22.2 n°210, UL 1581
Omologazioni:
UL recognized / CSA (
o
)
AWM STYLE 2464 80°C 300 V - CSA
AWM STYLE 2570 80°C 1000 V - CSA
Comportamento al fuoco:
Autoestinguente VW-1 (UL); FT1 (CSA); IEC 60332-1, CEI 20-35 (EU)
Resistenza agli olii industriali:
ASTM n°2, IRM 902, IEC 60811-2-1
3.2
Cavo di segnale
Materiale guaina esterna:
PVC - Classe 43 per UL 1581 e CSA 22.2 n°210
Colore verde
Temperatura di esercizio:
in posa fissa senza sollecitazioni meccaniche esterne (- 40 ... + 80)°C
in posa mobile (- 10 ... + 80)°C
Raggio minimo di curvatura:
in posa fissa 4 × diametro cavo
in posa mobile 7.5 × diametro cavo
Velocità massima di spostamento
in posa mobile:
Accelerazione/decelerazione
massime:
Vita a fatica in posa mobile:
3 m/s
10 m/s2
Da 3 a 6 milioni di movimenti
Tensione di esercizio:
30 V - 300 V (UL)
Normative di riferimento:
CSA 22.2 n°210, UL 1581
Omologazioni:
UL recognized / CSA (
o
)
AWM STYLE 2464 80°C 300 V - CSA
AWM STYLE 2570 80°C 1000 V - CSA
Comportamento al fuoco:
Autoestinguente VW-1 (UL); FT1 (CSA); IEC 60332-1, CEI 20-35 (EU)
Resistenza agli olii industriali:
ASTM n°2, IRM 902, IEC 60811-2-1
www.linearmech.it
39
4.
4.1
Designazione e codifica
Codifica servomotore
BM 45 L
-
30
24
E01
CV
01
L
1
2
3
4
5
6
7
8
1 Grandezza del servomotore
pag. 6-9
2 Freno motore
pag. 6-9
- = senza freno
B = con freno di stazionamento alimentato 24V dc
3 Velocità nominale
30 = 3000 giri/min (standard)
40 = 4000 giri/min (1)
50 = 5000 giri/min (1)
60 = 6000 giri/min (2)
4 Tensione di alimentazione drive
pag. 35
24 = 24 V dc
48 = 48 V dc
230 = 230 V ac - mono/trifase
400 = 400 V ac - trifase
5 Feedback motore
pag. 26
E01: encoder ottico, LINE-DRIVER, 2000 ppr (standard)
R01: resolver, 1 coppia polare, 7 V rms, 10 kHz (optional)
A01: encoder assoluto multigiro BISS (optional dalla taglia BM 63)
- = nessun dispositivo
6 Collegamenti elettrici
pag. 28-30
CV = uscita cavi potenza e segnale non terminati, L=0.5m
CN = doppio connettore a 90°
7 Protezioni termiche
pag. 27
01 = PTC (3)
02 = PTO
03 = KTY 84-130 (3)
8 Versione albero di uscita
pag. 10-25
C = albero cilindrico
L = albero con linguetta
(1) - vale solo per le taglie BM 45 e BM 63 - Contattate il ns. ufficio tecnico per maggiori informazioni
(2) - vale solo per la grandezza BM 45 - Contattate il ns. ufficio tecnico per maggiori informazioni
(3) - non supportati dagli azionamenti della Serie ECO forniti da Linearmech
40
Servomotori Brushless Linearmech
4.
4.2
Designazione e codifica
Codifica azionamento
ECO 2D 4-10
230 V
SAP + MSQ
E01
-
1
2
3
4
5
1 Modello azionamento
pag. 35
2 Tensione di alimentazione
pag. 35
3 Posizionatore
pag. 35
4 Feedback motore
pag. 35
5 Bus di comunicazione Ethercat
pag. 35
Per una corretta codifica dell’azionamento, consultare la tabella seguente:
Modello
Tensione di
alimentazione
Posizionatore
Feedback
Ethercat
MICROECO
10-20
24 ... 48 V dc
SAP + MSQ
E01
-
230 V ac
SAP + MSQ
E01
-
E01
-
230 V ac
A01
-
MINIECO
3-6
MINIECO PLUS
4-8
E01
ECO 2D
4-10
230 V ac
SAP + MSQ
R01
A01
E01
ECO 2D
6-15
230 V ac
SAP + MSQ
R01
A01
E01
ECO 4D
4-10
400 V ac
SAP + MSQ
R01
A01
E01
ECO 4D
5-13
400 V ac
SAP + MSQ
R01
A01
E01
ECO 4D
10-20
400 V ac
SAP + MSQ
R01
A01
www.linearmech.it
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
Ethercat
41
4.
Designazione e codifica
4.3
Codifica cavi di connessione
4.3.1
Cavi di segnale
CS
R01
M17
05
1
1
2
3
4
5
1 Tipo di cavo
pag. 39
CS = cavo di segnale
CP = cavo di potenza
2 Trasduttore
pag. 26
E01: encoder ottico, LINE-DRIVER, 2000 ppr
R01: resolver, 1 coppia polare, 7 V rms, 10 kHz
A01: encoder assoluto multigiro BISS
3 Terminazione lato motore
pag. 28-30
M17 = connettore M17 17 poli
M23 = connettore M23 17 poli
4 Lunghezza
05 = 5 metri
10 = 10 metri
15 = 15 metri
5 Terminazione lato Azionamento
1 = Connettore a vaschetta 26poli HD (per azionamento MINIECO-ECO2DECO4D)
2 = Fili liberi non terminati (per azionamento MICROECO)
4.3.2
Cavi di potenza
CP
M17
10
1
2
3
1 Tipo di cavo
pag. 39
CS = cavo di segnale
CP = cavo di potenza
2 Terminazione lato motore
pag. 28-30
M17 = connettore M17 7 poli
M23 = connettore M23 6 poli
3 Lunghezza
05 = 5 metri
10 = 10 metri
15 = 15 metri
42
Servomotori Brushless Linearmech
Appendice
A.Definizioni
Grandezza
Simbolo
Unità
di misura
Definizione
MOTORE
Coppia nominale continuativa
Tnom, 100K
Nm
T0, 100K
Nm
Tp
Nm
Velocità nominale
nnom
g/min
Velocità massima
nmax
g/min
I0, 100K
A
Coppia a rotore bloccato
(stallo)
Coppia massima (picco)
Corrente a rotore bloccato
(stallo)
Coppia che il motore può erogare per un tempo indefinito alla velocità nominale (in
condizioni di equilibrio termico), senza che vengano superati i limiti di temperatura
relativi alla classe di isolamento. Questo valore è definito al banco di prova secondo
le condizioni riportate all’appendice B.
Coppia che il motore può erogare per un tempo indefinito a rotore bloccato (in
condizioni di equilibrio termico), senza che vengano superati i limiti di temperatura
relativi alla classe di isolamento. Questo valore è definito al banco di prova ad un
regime di rotazione prossimo a 0 rpm, secondo le condizioni riportate all’appendice
B.
Coppia generata alla corrente massima (picco). La coppia massima è disponibile
per tempi brevi per ottenere un comportamento dinamico del sistema (brusche
variazioni delle condizioni di funzionamento). Il superamento questo valore comporta
la demagnetizzazione irreversibile del gruppo magnetico sul rotore.
Velocità che il motore può mantenere per un tempo indefinito, nei limiti termici
relativi alla classe di isolamento, con coppia ricavabile dalla curva caratteristica
coppia - velocità rappresentata sul diagramma specifico del motore.
E’ la velocità di rotazione massima meccanicamente ammissibile. Dipende dalle
forze centrifughe sulle masse rotanti, dal grado di equilibratura del rotore, dai
cuscinetti.
Corrente (valore RMS) fase - fase fornita al motore per generare la coppia a rotore
bloccato (stallo).
Corrente (valore RMS) fase - fase fornita al motore per generare la coppia massima
(picco). Questa corrente è limitata dal circuito magnetico del motore: anche se
superata per brevi istanti, dà una demagnetizzazione irreversibile dei magneti.
Tensione (valore RMS) fase - fase prodotta dal motore in funzionamento a
V/1000 g/min 1 000 rpm, ad una temperatura ambiente di 20°C, per un incremento medio di
temperatura negli avvolgimenti pari a 20 K.
Rapporto fra la coppia a rotore bloccato e la corrente a rotore bloccato
Nm/A
(T0, 100K / I0, 100K), con incremento di temperatura sugli avvolgimenti pari a 100 K
(classe isolamento F).
Indica il tempo necessario per il riscaldamento del motore freddo fino al
min
raggiungimento di una sovratemperatura 0.63 × 100 K, con un carico I0, 100K .
Resistenza elettrica fase-fase alla temperatura ambiente di 20°C. Gli avvolgimenti
Ω
hanno un collegamento a stella.
Induttanza degli avvolgimenti fase - fase. Gli avvolgimenti hanno un collegamento
mH
a stella.
A
Corrente massima (picco)
Ip
Costante di tensione
kE
Costante di coppia
kT
Costante di tempo termica
tth
Resistenza di avvolgimento
Rph
Induttanza di avvolgimento
LD
Costante di tempo elettrica
tel
ms
Jmotore
kg × m2
Momento d’inerzia degli elementi rotanti del motore.
Jmotore BR
kg × m2
Momento d’inerzia degli elementi rotanti del motore e del freno.
FR
N
Carico costante che applicato radialmente all’albero motore nella sua mezzeria, a
3000 rpm comporta una durata nominale dei cuscinetti di 10000 h.
FN
N
Carico costante che applicato assialmente all’albero motore, a 3000 rpm comporta
una durata nominale dei cuscinetti di 10000 h.
Tensione di alimentazione
UBR
V
Potenza assorbita bobina
PBR
W
Coppia nominale
TBR
Nm
Tempo di sgancio
t–BR
ms
Tempo di aggancio
tBR
ms
Momento d’inerzia
(senza freno)
Momento d’inerzia
(con freno)
Carico radiale ammissibile
sull’albero
Carico assiale ammissibile
sull’albero
Rapporto fra l’induttanza e la resistenza di avvolgimento (LD / Rph).
FRENO
www.linearmech.it
Tensione di alimentazione in corrente continua da fornire alla bobina d’eccitazione
del freno per ottenere lo sbloccaggio.
Potenza assorbita dalla bobina d’eccitazione del freno.
Coppia di frenatura di stazionamento (non può essere impiegato per arrestare il
motore in movimento).
Tempo di reazione misurato dall’istante in cui viene applicata la tensione nominale
di alimentazione del freno, fino alla sua completa apertura.
Tempo di reazione misurato dall’istante in cui viene tolta alimentazione al freno, fino
al raggiungimento della coppia nominale di frenatura TBR.
43
Appendice
B.
Condizioni di prova
Tutte le prestazioni elettriche e meccaniche dei servomotori brushless serie BM sono state ricavate da test
su banco prova. Durante i test il motore è stato montato orizzontalmente, supportato da una piastra di
alluminio isolata termicamente dal basamento del banco, e accoppiato tramite dinamometro al freno. Le
dimensioni delle piastre di alluminio utilizzate sono le seguenti, in funzione della grandezza di motore testata:
•
BM 45, BM 63, BM 82: 250×250×6 mm
•
BM 102: 350×350×20 mm
Durante le prove termiche per la definizione della coppia a rotore bloccato ( T0, 100K ) e della coppia nominale
continuativa ( Tnom, 100K ) il motore è stato portato, in condizioni di equilibrio termico, ad un incremento di
temperatura sugli avvolgimenti pari a 100 K, senza superare i limiti di temperatura relativi alla classe di
isolamento F.
Sistema di supporto del
motore, termicamente isolato
Motore in TEST
Isolante termico
44
Piastra di alluminio per la dissipazione termica
Giunto torsionalmente rigido
Torsiometro per
rilievo della coppia
Freno
il
Servomotori Brushless Linearmech
Note
www.linearmech.it
45
Note
46
Servomotori Brushless Linearmech
Note
www.linearmech.it
47
Altri prodotti della gamma Servomech e Linearmech
dove applicare i Servomotori Brushless Serie BM di produzione Linearmech
Servoattuatori lineari
Azionamento lineare con vite a sfere
7 grandezze disponibili
Fissaggi secondo normativa ISO 15552
Velocità lineare fino a 1500 mm/s
Capacità di carico da 0.5 kN a 40 kN
Serie SA IL
Design In Linea
Serie SA PD
Design Parallelo
Martinetti con vite a sfere
Serie MA BS
Riduttore a vite-ruota elicoidale
Capacità di carico da 5 kN a 350 kN
8 grandezze disponibili
Diametro vite a sfere da 16 mm a 100 mm
Velocità lineare fino a 285 mm/s
Vite a sfere rotante
Vite a sfere traslante
Martinetti con vite a sfere
Serie HS
Riduttore a coppia conica Gleason
Capacità di carico da 10 kN a 200 kN
6 grandezze disponibili
Diametro vite da 25 mm a 80 mm
Velocità lineare fino a 2000 mm/s
Altri prodotti della gamma Servomech e Linearmech
dove applicare i Servomotori Brushless Serie BM di produzione Linearmech
Attuatori lineari meccanici
Serie ATL
Azionamento lineare con vite trapezoidale
7 grandezze disponibili
Capacità di carico da 4 kN a 80 kN
Velocità lineare fino a 150 mm/s
Serie BSA
Azionamento lineare con vite a sfere
7 grandezze disponibili
Capacità di carico da 4 kN a 60 kN
Velocità lineare fino a 120 mm/s
Serie UAL
Azionamento lineare con vite trapezoidale
5 grandezze disponibili
Capacità di carico da 2 kN a 15 kN
Velocità lineare fino a 500 mm/s
Serie UBA
Azionamento lineare con vite a sfere
5 grandezze disponibili
Capacità di carico da 2 kN a 15 kN
Velocità lineare fino a 500 mm/s
Per maggiori informazioni consultate i nostri cataloghi:
© Copyright LINEARMECH 2014
I dati riportati nel presente catalogo, accuratamente controllati, sono comunque indicativi e non costituiscono impegno alcuno.
LINEARMECH si riserva, in qualsiasi momento, di apportare modifiche a propria discrezione senza preavviso.
In questo catalogo:
Servomotori Brushless Serie BM
Elevata efficienza e prestazioni
Tecnologia avanzata a poli scomposti
7 taglie disponibili
Coppia nominale fino a 10 Nm
Disponibili con freno
Encoder ottico standard, a richiesta resolver o encoder assoluto multigiro
Azionamenti Serie Eco
Funzioni meccatroniche per la gestione di profili di movimenti lineari anche complessi
Completamente integrati nei Servoattuatori Lineari Linearmech
- Controllo di posizione
- Controllo di coppia
- Controllo di velocità
Servomotori
Brushless
Altri prodotti della gamma Servomech e Linearmech
dove applicare Servomotori Brushless Serie BM di produzione Linearmech
Martinetti con vite a sfere
Servomech
Servoattuatori lineari
Linearmech
Attuatori lineari meccanici
Servomech
www.linearmech.it
Linearmech S.r.l.
Via Caduti di Sabbiuno, 3 - 40011 Anzola dell’Emilia (Bologna) - ITALIA
Tel. +39.051.6504311 - Fax +39.051.6504313 - [email protected]
Catalogo 01 / 14