Grandezze Fisiche
Osservando un oggetto o un fenomeno (naturale o sperimentale) possiamo descriverlo usando
aspetti qualitativi o quantitativi.
Tutti gli aspetti che possono essere quantificati cioè descritti con un “numero” vengono definiti
grandezze fisiche (GF).
Un vaso può essere descritto con tanti aggettivi, bello (no GF), alto (è una GF, è una lunghezza),
colorato (no GF), capiente (è una GF, è un volume).
Le GF vengono indicate con una lettera o una formula dentro a delle parentesi quadre, ad esempio
la lunghezza [ l ].
La lunghezza è una GF fondamentale, da questa è infatti possibile calcolare altre GF, dette derivate,
attraverso formule matematiche. Il volume di un parallelepipedo, ad esempio, è definito come:
Volume = Lato x Lato x Lato = lunghezza x lunghezza x lunghezza
e quindi l’equazione dimensionale del volume può essere scritta con la seguente notazione:
[ V ] = [ l x l x l ] = [ l3 ]
Misura di una Grandezza Fisica
Come faccio a quantificare un fenomeno?
Lo devo confrontare con qualcosa che “conosco” e che prendo come campione di riferimento.
Stiamo misurando il fenomeno che ci interessa.
Nota: posso confrontare solo grandezze omogenee cioè dello stesso tipo.
Si definiscono grandezze commensurabili tutte le grandezze che hanno sottomultipli comuni.
Il campione di riferimento prende il nome di unità di misura (UM).
Se voglio misurare la lunghezza di un lato del tavolo posso prendere una matita e dire quante volte
la matita sta nel tavolo. La matita è il mio campione di riferimento e quindi la mia unità di misura
mentre il numero di matite che mi servono per coprire la lunghezza del lato del tavolo è la misura
del tavolo.
Posso ad esempio dire che il mio tavolo è lungo 11 matite. Il problema è che in questo caso il
campione di riferimento non è “standard” quindi non tutti (forse nessuno) riconoscono come UM di
lunghezza la “matita”. È necessario quindi trovare dei campioni di riferimento standard che tutti
devono adottare.
Dobbiamo quindi definire un insieme di campioni di riferimento standard che costituiranno un
sistema di UM.
Non è necessario definire un’UM per ciascuna GF, fortunatamente la maggior parte delle GF sono
derivate, mi basta quindi definire solo le UM delle GF fondamentali, le altre verranno calcolate
utilizzando delle formule matematiche, da cui si può ricavare l’equazione dimensionale, come
abbiamo fatto prima per il volume.
In particolare bastano 9 grandezze fisiche fondamentali per descrivere qualunque fenomeno
naturale.
Esistono diversi Sistemi di Unità di Misura (SUM) che si possono differenziare per la scelta delle
grandezze fondamentali o per la scelta dei campioni di riferimento.
Vediamo i più usati.
Sistema MKS:
è il SUM usato in meccanica (una piccola porzione della fisica).
Appunti di Fisica – Adriano Nobile
Pagina 1
Ha bisogno di 3 sole grandezze fondamentali:
Grandezza
Lunghezza
Massa
Tempo
Simbolo GF
[l]
[m]
[t]
Nome UM
metro
chilogrammo
secondo
Simbolo UM
m
kg
s
Sistema CGS:
anche questo sistema è utilizzato in meccanica, le UM della lunghezza e della massa sono
sottomultipli di quelle dell’MKS.
Grandezza
Lunghezza
Massa
Tempo
Simbolo GF
[l]
[m]
[t]
Nome UM
centimetro
grammo
secondo
Simbolo UM
cm
g
s
Sistema Internazionale o SI:
è il sistema utilizzato in tutto il mondo in campo scientifico. Ha 9 GF fondamentali, le prime 3 sono
quelle del sistema MKS.
Grandezza
Lunghezza
Massa
Tempo
Temperatura
Intensità di corrente
Intensità luminosa
Unità di massa
Angolo
Angolo solido
Simbolo GF
[l]
[m]
[t]
[T]
[i]
[ il ]
[ Um ]
Nome UM
metro
chilogrammo
secondo
Kelvin
Ampere
Candela
Mole
radiante
steradiante
Simbolo UM
m
kg
s
K
A
Cd
Mol
Rad
Sterad
Questi sono i sistemi di riferimento che utilizzeremo più spesso durante il corso in quanto sono
quelli più generali, esistono però altri SUM ed è bene sapere alcune caratteristiche di questi.
Sistema Anglosassone o Sistema Imperiale Britannico:
ha le stesse 9 GF del SI però alcune UM sono diverse, per la massa usano la libbra, per le lunghezze
la yarda (sottomultipli piede e pollice, multiplo miglio), per la temperatura il grado Fahrenheit (°F).
Sistema Tecnico:
in questo SUM cambia una grandezza fondamentale, al posto della massa abbiamo la forza e l’unità
di misura è il kgforza (chilogrammo forza). Spesso come UM della temperatura viene usato il grado
centigrado °C.
CENTRO STUDI PALLAI
PREPARAZIONE PER TUTTI GLI ESAMI UNIVERISTARI DEL TUO CORSO DI LAUREA
LEZIONI INDIVIDUALI PERSONALIZZATE
CORSI COLLETTIVI
Via M. Poggioli, 3 – 00161 Roma – tel. 06.44.36.13.77 - www.pallai.it
Appunti di Fisica – Adriano Nobile
Pagina 2
Il Sistema Internazionale
Il SI è stato scelto dalla comunità scientifica come SUM comune in quanto la maggior parte delle
UM hanno multipli e sottomultipli in base decimale (vedi tabella). L’eccezione è il tempo, per
quanto riguarda i sottomultipli anche qui abbiamo un sistema decimale mentre per i multipli del
secondo abbiamo inizialmente un sistema esadecimale:
1 minuto (min) = 60 secondi (s)
1 ora (h) = 60 minuti (min) = 3600 secondi (s)
poi il sistema cambia andamento, non è più “logico”, questo è dovuto al fatto che l’unità di misura
del tempo è stata introdotta in tempi molto antichi ed è legata a fenomeni naturali quali la lunghezza
di un anno solare e il giorno solare.
1 giorno 24 h 1440 min 86400 s
1 anno 365,25 gg 8766 h …
Prefisso
Tera
Giga
Mega
Chilo
etto
deca
UM
deci
centi
milli
micro
nano
pico
Simbolo
T
G
M
k
h
da
-d
c
m
n
p
UM x valore
1.000.000.000.000
1.000.000.000
1.000.000
1.000
100
10
1
0,1
0,01
0,001
0,000001
0,000000001
0,000000000001
Potenze di 10 Notazione scientifica
10^12
E12
10^9
E9
10^6
E6
10^3
E3
10^2
E2
10
E1
1
1
10^-1
E-1
10^-2
E-2
10^-3
E-3
10^-6
E-6
10^-9
E-9
10^-12
E-12
THz
GW
Mm
Kg
hl
dam
Esempio
Tera Hertz
Giga Watt
Megametro
Chilogrammo
Ettolitro
decametro
dl
cm
mg
s
nm
pm
decilitro
centimetro
milligrammo
microsecondo
nanometro
picometro
Per le grandezze derivate le UM vengono calcolate l’equazione dimensionale che le lega alle GF
fondamentali, è quindi necessario tenere in conto questa anche per passare da un multiplo ad un
sottomultiplo (e viceversa).
Prendiamo ad esempio l’area di un parallelepipedo:
[ A ] = [ l x l ] = [ l2 ]
L’unità di misura dell’area è quindi il m2.
Se voglio passare da m2 a cm2?
1 m2 = 1 m x 1 m = 100 cm x 100 cm = 10000 cm2 = 104 cm2
Altro esempio più complicato, lo vedremo meglio in seguito, è l’energia. L’UM dell’energia è il
Joule (J) nel sistema SI ( e nell’MKS) mentre nel sistema CGS è l’erg.
Appunti di Fisica – Adriano Nobile
Pagina 3
[ E ] = [ m l2 t-2 ]
1 J = 1 kg x 1 m2 x 1 s-2 = 1000 g x 10000 cm2 x 1 s-2 = 10000000 erg = 107 erg.
Meccanica
La meccanica “classica” può essere suddivisa in tre parti:
Cinematica: studia il moto, si occupa solo di “come” si muove un oggetto.
Dinamica: studia le cause del moto, si occupa del “perché” si muove un oggetto.
Statica: studia le condizioni di equilibrio dei corpi.
Cinematica
Un corpo è in moto quando la sua posizione rispetto ad un altro, preso come riferimento e
considerato fermo, varia nel tempo.
Il concetto di moto è “relativo”. Se vedo passare una macchina quella è in moto rispetto a me che
sono affacciato alla finestra e rispetto ad un albero per strada, ma è ferma rispetto al guidatore che si
muove solidalmente con lei.
La linea descritta dall’insieme delle posizioni assunte dal punto nel tempo è detta traiettoria. Di
nuovo torniamo ad un esempio, prendiamo una moto su una strada e osserviamo come si muove la
valvola per gonfiare la ruota. La traiettoria
rispetto al mozzo (il punto in cui la ruota è
fissata alla forcella) è una circonferenza, la
traiettoria rispetto a noi che siamo fermi per
strada è una curva detta cicloide mentre rispetto
Cicloide
ad uno dei raggi della ruota è ferma.
Ora iniziamo a familiarizzare con il concetto di velocità. Abbiamo visto che un punto è in moto se
la sua posizione varia nel tempo rispetto ad un riferimento, allora definiamo la velocità media come
il rapporto tra lo spazio percorso (s), e il tempo impiegato a percorrerlo (t).
s
v= t
è una grandezza derivata quindi dobbiamo calcolare la sua unità di misura usando l’equazione
dimensionale:
[ v ] = [ l x t-1 ] = [ l t-1 ]
e quindi l’UM della velocità nel SI e nel MKS sarà m/s mentre nel CGS cm/s.
Un’altra unità di misura della velocità molto usata è il km/h, è molto utile sapere come passare da
m/s a km/h:
1 m/s = 1
m
s
=
10 −3 km
1
h
3600
=
3600 km
1000
h
= 3,6 km/h
1 km/h = 1/3,6 m/s = 0,27778 m/s
Appunti di Fisica – Adriano Nobile
Pagina 4
Ora vediamo qualche tipo di moto particolare.
Moto Rettilineo Uniforme: è il moto di un punto materiale lungo una traiettoria rettilinea, la
velocità del punto, rispetto ad un riferimento fisso, resta costante nel tempo.
Si dice rettilineo uniforme se il corpo percorre spazi uguali in tempi uguali.
Prendiamo come esempio un’auto su un rettilineo di 10 km, dividiamo questo spazio in cinque parti
(2 km ciascuna). Se l’auto percorre ogni intervallo in 1 minuto allora la sua velocità sarà di 120
km/h:
2 km
2 Km
Km
=
= 120
1
1min
h
60 h
Ma vale anche:
4 km
4 Km
Km
=
= 120
2
2min
h
60 h
E anche:
10 km
10 Km
Km
=
= 120
5
5min
h
60 h
In ogni intervallo la velocità è uguale.
In questo caso la velocità media corrisponde alla velocità effettiva che ha il punto materiale in ogni
istante del moto.
Scriviamo l’equazione del moto rettilineo uniforme, cioè esprimiamo come varia la posizione del
punto nel tempo:
s = vt + so
dove s è la posizione sulla la retta al tempo t, v è la velocità del punto, so è la posizione iniziale del
punto (quella che aveva per t=0).
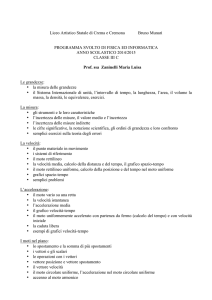
Il diagramma orario (il grafico con lo spostamento sull’asse delle ordinate e tempo sull’asse delle
ascisse) è una retta, se so era nullo passa per l’origine degli assi. La velocità, per il moto rettilineo
uniforme, rappresenta la pendenza della retta del diagramma orario.
Diagramma orario del moto rettilineo uniforme e diagramma della velocità.
Appunti di Fisica – Adriano Nobile
Pagina 5
Moto rettilineo uniformemente accelerato: Anche in questo caso il punto materiale si muove su
una traiettoria rettilinea ma la velocità aumenta nel tempo in modo uniforme (se la velocità
diminuisce si può parlare di moto decelerato). Introduciamo il concetto di accelerazione che
rappresenta appunto come varia la velocità in funzione del tempo. L’accelerazione media per un
qualunque moto viene calcolata come il rapporto tra la variazione della velocità in un intervallo di
tempo e l’intervallo di tempo stesso:
a=
v 2 −v 1
t 2 −t 1
=
v
t
L’UM dell’accelerazione nel SI è il m/s2. Scriviamo l’equazione dimensionale:
[ a ] = [ v t -1 ] = [ l t-1 t-1] = [ l t-2 ]
Per il moto rettilineo uniformemente accelerato abbiamo che l’accelerazione media è costante e
quindi possiamo parlare semplicemente di accelerazione.
Consideriamo un’automobile che accelera su un rettilineo per un breve periodo di tempo.
Dividiamo il periodo in tanti piccoli intervalli t, tutti con la stessa durata. Se in ogni intervallo di
tempo t la velocità aumenterà della stessa quantità v allora l’automobile si muove di moto
rettilineo uniformante accelerato.
In formule:
v − vo = at
dove v è la velocità all’istante t, vo è la velocità all’istante t=0 e a è l’accelerazione.
Adesso dobbiamo ricavare l’equazione del moto rettilineo uniformante accelerato. Sappiamo che lo
spostamento (s = s – so) è legato alla velocità media (vm) dalla relazione s = vm t. Per il moto
uniformemente accelerato (e solo per questo tipo di moto) la velocità media è uguale alla media
delle velocità, pertanto:
vm =
vo + (vo + at)
= vo + 1 2 at
2
e quindi lo possiamo esprimere lo spostamento in funzione del tempo con la:
s = vo t + 1 2 at 2
IL CENTRO STUDI PALLAI
PREPARAZIONE AGLI ESAMI UNIVERSITARI
CHIMICA E PROPEDEUTICA BIOCHIMICA- FISICA MEDICA- BIOLOGIA- ISTOLOGIA- BIOCHIMICA… et al.
Via M. Poggioli, 2 – 00161 Roma – tel. 06.44.36.13.77
Appunti di Fisica – Adriano Nobile
Pagina 6
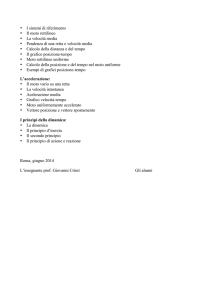
Diagrammi orari del moto rettilineo uniformemente accelerato. Per lo spostamento un ramo di una parabola, per la
velocità una retta con pendenza a passante per vo (se vo=0 passa per l’origine degli assi) e per l’accelerazione una retta
parallela all’asse delle ascisse.
Graficando l’equazione del moto, l’espressione della velocità in funzione del tempo e
l’accelerazione costante ottenendo i diagrammi orari del moto uniformante accelerato.
Caduta di un grave: In natura esiste un esempio di moto rettilineo uniformemente accelerato, la
caduta di un grave.
Tutti i corpi, vicino alla terra, cadono nel vuoto allo stesso modo, cioè con la stessa legge del moto,
indipendentemente dalla loro massa, forma e composizione.
Il valore dell’accelerazione di gravità viene indicata con g e vale 9,81 m/s2.
Per la caduta libera valgono le seguenti formule:
v = gt
h=
e
1
2
gt 2 + ho
Dove v è la velocità all’istante t, h è l’altezza a cui si trova il grave all’istante t e ho è l’altezza a cui
si trovava il grave al tempo t=0.
Se invece lanciamo in aria un grave, questo è soggetto ad un moto uniformante decelerato,
l’accelerazione g è diretta in verso opposto alla direzione del moto. Avremo quindi le seguenti
formule:
v = vo − gt
e
h = vo t −
1
2
gt 2
Moto rettilineo vario: Si parla di moto rettilineo vario quando l’accelerazione non è costante nel
tempo, la velocità varia in ogni istante. Possiamo usare ancora il concetto di velocità media e
trattare il moto come un moto rettilineo uniforme oppure possiamo introdurre il concetto di velocità
istantanea. Se il moto dura un certo periodo di tempo, possiamo dividerlo in tanti piccoli intervalli
t e calcolare la velocità media in ciascun intervallo. Se immaginiamo di poter misurare lo
spostamento (s) avvenuto in un intervallo di tempo (t) talmente piccolo da poter essere
considerato nullo allora avremo la velocità istantanea (vi). Ci siamo imbattuti nei concetti di limite e
di derivata:
s
ds
=
t0 t
dt
vi = lim
La velocità istantanea è definita come il limite per t che tende a zero del rapporto tra lo
spostamento s avvenuto nell’intervallo di tempo t e l’intervallo di tempo stesso o più
semplicemente è la derivata dello spostamento rispetto al tempo.
Appunti di Fisica – Adriano Nobile
Pagina 7
Graficamente, se consideriamo il diagramma orario del moto vario, la velocità istantanea
rappresenta il valore della pendenza della retta tangente alla curva all’istante t.
Allo stesso tempo possiamo definire l’accelerazione istantanea (ai) come il limite per t che tende a
zero del rapporto tra la variazione di velocità v avvenuta nell’intervallo di tempo t e l’intervallo
di tempo stesso o più semplicemente è la derivata della velocità rispetto al tempo.
v
dv
=
t0 t
dt
ai = lim
Se consideriamo il grafico della velocità in funzione del tempo l’accelerazione istantanea
rappresenta la pendenza della retta tangente alla curva nell’istante t.
VETTORI
Le GF possono essere anche classificate come grandezze scalari o grandezze vettoriali.
Esempi di grandezze scalari sono il tempo, la massa e la temperatura e l’energia, per essere definite
hanno bisogno di un numero e dell’UM associata.
Esempi di grandezze vettoriali sono lo spostamento, la velocità, la forza e l’accelerazione.
Definiamo un vettore come un segmento orientato (una freccia) per caratterizzarlo abbiamo sempre
bisogno di un numero, che in questo caso viene chiamato modulo del vettore, e a cui associamo
l’UM della grandezza, e poi dobbiamo definire altre due proprietà del vettore, la direzione, cioè la
retta su cui giace il segmento e il verso, cioè, chiamati O e P gli estremi del vettore, con O origine
del vettore allora la freccia andrà da O a P.
Vediamo ora alcune proprietà dei vettori.
La somma di due vettori A e B è il vettore A+B, per definirlo bisogna usare una costruzione
geometrica. Si dispongono i due vettori in modo che abbiamo l’origine in comune, si costruisce il
parallelogramma associato e il vettore somma avrà modulo uguale alla lunghezza della diagonale
maggiore del parallelogramma, direzione parallela a quella della diagonale maggiore del
parallelogramma e verso dall’origine comune ai 2 vettore al vertice opposto (vedi figura).
Un altro modo per ottenere il vettore somma è quella di sovrapporre l’origine del vettore B con
l’estremo del vettore A, il vettore A + B è il vettore che congiunge l’origine di A con l’estremo di
B.
Appunti di Fisica – Adriano Nobile
Pagina 8
Definiamo il prodotto di un vettore A per uno scalare c come il vettore B con modulo pari al
modulo di A moltiplicato per il modulo dello scalare c, la direzione è la stessa del vettore A e il
verso è lo stesso di A se lo scalare c è positivo, opposto ad A se c è negativo.
Da questo possiamo considerare il vettore A – B come il vettore somma del vettore A e del vettore
-B.
Il prodotto scalare di due vettori A e B è una grandezza scalare c (non devo definire direzione e
verso).
c = 𝐀 ∙ 𝐁 = 𝐀 𝐁 cos φ
ma b=|B|cos è la proiezione del vettore B sulla direzione del vettore A, e pertanto il prodotto
scalare di due vettori si ottiene moltiplicando il modulo del primo vettore per la proiezione del
secondo sulla direzione del primo. È importante notare che se =90° = /2 allora b=0 e quindi il
prodotto scalare è nullo, se invece i due vettori sono paralleli allora il prodotto scalare è uguale al
prodotto dei moduli dei vettori e il segno è + se i due vettori hanno stesso verso (=0°), è – se i due
vettori hanno verso opposto (=180°).
Il prodotto vettoriale di due vettori A e B è un vettore C il cui modulo è dato dalla:
|𝐂| = 𝐀𝐁 = 𝐀 𝐁 sin φ
ed equivale all’area del parallelogramma costruito con i due vettori. La direzione è quella di una
retta perpendicolare al piano su cui giacciono i due vettori e il verso è quella piedi testa di un
osservatore che vede ruotare in senso antiorario il primo vettore per farlo sovrapporre al secondo
percorrendo l’angolo più piccolo di 180° (in alternativa, mettete la mano destra sul primo vettore in
modo che chiudendola il primo vettore ruoti e vada a sovrapporsi al secondo percorrendo l’angolo
minore di 180°, allora il verso del vettore C è quello del pollice).
MOTO CURVILINEO
Consideriamo un oggetto che si muove di moto qualunque in un piano. All’istante t1 il punto si
troverà nel punto P1 che può essere rappresentato col vettore r1 e all’istante t2 si troverà nel punto P2
rappresentato dal vettore r2.
Definiamo il vettore spostamento r avvenuto
nell’intervallo di tempo t = t1 – t2 come la
differenza dei due vettori posizione:
∆𝐫 = 𝐫2 − 𝐫1
Riprendendo il concetto di velocità media
(𝐯) vista per i moti rettilinei:
𝐯=
∆𝐫
∆t
abbiamo che la velocità media è un vettore il
cui modulo è uguale al rapporto tra il modulo
del vettore spostamento r avvenuto nell’intervallo di tempo t e l’intervallo di tempo stesso, la
direzione e il verso sono le stesse del vettore spostamento.
Appunti di Fisica – Adriano Nobile
Pagina 9
Sempre riprendendo il concetto di velocità istantanea introdotta per i moti rettilinei, supponiamo di
far tendere a zero l’intervallo di tempo t, la velocità v all’istante t sarà data dalla:
𝐫
d𝐫
=
t0 t
dt
𝐯 = lim
il vettore v è quindi la derivata del vettore
spostamento rispetto al tempo. Il vettore
velocità giace sulla retta tangente alla
traiettoria e lo stesso verso del vettore
spostamento.
Allo stesso modo, se consideriamo i vettori
velocità v1 e v2 negli istanti t1 e t2
rispettivamente,
possiamo costruire il
vettore differenza v = v2 – v1 e introdurre il
concetto di accelerazione vettoriale media:
∆𝐯
∆t
come il vettore di modulo uguale al rapporto tra la differenza dei vettori v1 e v2 e l’intervallo di
tempo t = t1 – t2, direzione e verso coincidenti con quelli del vettore v.
Per t 0 avremo l’accelerazione istantanea:
𝐚=
𝐯
d𝐯
d2 𝐫
=
= 2
t0 t
dt
dt
𝐚 = lim
che può essere scritta anche come la derivata del vettore velocità rispetto al tempo o come la
derivata seconda del vettore spostamento.
Il vettore accelerazione ha direzione perpendicolare al vettore velocità.
Moto circolare uniforme: è il moto di un oggetto su traiettoria circolare e con velocità costante in
modulo. Consideriamo una circonferenza di raggio R e introduciamo il concetto di periodo (T) che
corrisponde al tempo necessario all’oggetto per compiere un
giro completo. Lo spazio percorso in T è uguale alla lunghezza
della circonferenza (2R). La velocità è costante in modulo (
|v| = |v1| = |v2| = |v3| = cost.) pertanto avremo:
|𝐯| =
2πR
T
Definiamo anche altre grandezze utili a caratterizzare il moto
circolare uniforme.
La frequenza (f o ) è l’inverso del periodo e ci dice il numero
di giri che l’oggetto compie nell’unità di tempo. L’UM della
frequenza è l’Hertz (Hz).
𝑓= 1T
e l’equazione dimensionale è
𝑓 = 1 t = t −1
La velocità angolare () è definita come la velocità con cui un raggio spazza un angolo e quindi
la possiamo scrivere come il rapporto tra l’angolo spazzato nell’intervallo di tempo t e
Appunti di Fisica – Adriano Nobile
Pagina 10
l’intervallo di tempo stesso oppure, dato che sappiamo che l’oggetto impiega T per fare un giro
completo (2) possiamo scriverla nei seguenti modi:
ω=
φ 2π
=
= 2π𝑓
∆t
T
L’unità di misura della velocità angolare nel SI è il radiante al secondo (rad/s). Per il moto circolare
uniforme è costante.
Abbiamo detto che la velocità è costante in modulo ma la sua direzione cambia in ogni istante,
pertanto esisterà un vettore v = v2 – v1 non nullo e quindi un vettore accelerazione medio:
𝐚 = 𝐯 ∆t
e un vettore accelerazione istantaneo a dato dal limite per t0 il cui modulo è costante (solo per il
moto circolare uniforme) ed è dallo dalle:
|𝐚| =
2π 𝐯
|𝐯|𝟐
= 2π𝑓|𝐯| =
= ω2 R
T
R
Per semplicità scriviamo anche le relazioni che legano la velocità alla frequenza e alla velocità
angolare:
|𝐯| = 2πR𝑓 = ωR
Moto parabolico o moto balistico: l’oggetto è animato contemporaneamente da due moti distinti e
indipendenti, moto rettilineo uniforme nella direzione orizzontale e moto uniformemente accelerato
sulla verticale (caduta di un grave).
x = vx t
h = − 1 2 gt 2 + vy t
Questo sistema di due equazioni descrive il moto di un oggetto “sparato” verso l’alto con un angolo
> 0 rispetto alla direzione orizzontale. vx è la componente orizzontale della velocità iniziale (e
resta costante), vy è la componente orizzontale della velocità iniziale. Dalla prima equazione
possiamo calcolare il tempo e sostituirlo nella seconda, ottenendo:
h= −
g 2 vy
x + x
2vx2
vx
questa è un equazione di secondo grado, che in un piano cartesiano x/h è una parabola (da qui moto
parabolico). Quando l’oggetto raggiunge nuovamente terra (h = 0) il moto ha termine, l’oggetto ha
percorso la distanza massima che viene chiamata gittata (xg):
xg =
mentre l’altezza massima (hm) è data dalla:
Appunti di Fisica – Adriano Nobile
2vx vy
g
1 vy2
hm =
2 g
Pagina 11
Se invece l’oggetto viene sparato orizzontalmente da un’altezza ho allora vy = 0 e il sistema diventa:
x = vx t
h = − 1 2 gt 2 + ho
Fig. A Moto di un oggetto sparato lungo una direzione di angolo > 0 rispetto alla direzione orizzontale Fig. B moto di un
oggetto lanciato con velocità orizzontale 0.
In questo caso la gittata può essere calcolata con la:
xg = vx
2ho
g
Moto armonico: è un moto rettilineo vario ma può essere facilmente descritto usando le grandezze
introdotte per il moto circolare uniforme.
Dato un punto P che si muove di moto circolare uniforme su una circonferenza di raggio R, il punto
Q, proiezione del punto P sul diametro AB della
circonferenza, si muove di moto armonico.
Si dice che Q oscilla tra gli estremi A e B. Il centro della
circonferenza O viene detto anche centro di oscillazione.
Come per il moto circolare uniforme, è un moto periodico,
dopo un intervallo di tempo T si ripresenta con le stesse
caratteristiche (posizione, velocità, accelerazione). T è la
durata di un’oscillazione completa (da A a B e ritorno in
A). Ma T è il tempo che P impiega a fare un giro completo
della circonferenza, pertanto possiamo scrivere:
T=
2π
ω
con velocità angolare del moto circolare uniforme.
Indicando con x la posizione del punto Q rispetto ad O (lunghezza del segmento OQ possiamo
scrivere:
x = OQ = R cos φ = R cos ωt
che rappresenta l’equazione oraria del moto armonico. Abbiamo usato una nota relazione
trigonometrica ( OQ = R cos φ ) e la relazione che lega la velocità angolare all’angolo spazzato
nell’intervallo di tempo t ( = t ) usata per definire la velocità angolare nel moto circolare
uniforme. Si può dimostrare graficamente che la velocità del punto Q può essere espressa dalla:
Appunti di Fisica – Adriano Nobile
Pagina 12
v = −ω R sin ωt
e allo stesso modo possiamo scrivere l’accelerazione come:
a = − ω2 R cos ωt = −ω2 x
Nella figura possiamo vedere il diagramma orario del moto armonico e l’andamento della velocità e
dell’accelerazione in funzione di t.
Per t = 0 e t = 2:
Q si trova in A.
|v| = 0.
|a| è massimo.
Il moto si inverte.
Per t = :
Q si trova in B.
|v| = 0.
|a| è massimo.
Il moto si inverte.
Per t = 𝜋 2 e t = 3 2 𝜋:
Q si trova in O.
|v| è massimo.
L’accelerazione nulla.
Per 0 < 𝜔𝑡 < 𝜋 2 :
Q va da A ad O.
|v| aumenta.
|a| diminuisce.
Appunti di Fisica – Adriano Nobile
Per 𝜋
2 < 𝜔𝑡 < 𝜋 :
Q va da O a B
|v| diminuisce.
|a| aumenta.
Per 𝜋
< 𝜔𝑡 < 3 2 𝜋 :
Q va da B ad O.
|v| aumenta.
|a| diminuisce.
Per 3
2 𝜋 < 𝜔𝑡 < 2𝜋 :
Q va da O ad A.
|v| diminuisce.
|a| aumenta.
Pagina 13
DINAMICA
Iniziamo a studiare le cause che fanno variare il moto degli oggetti, cioè le Forze. La forza è una
grandezza fisica vettoriale, dobbiamo definire il modulo, che viene chiamato anche intensità della
forza, direzione e verso. Se applichiamo una forza ad un oggetto questo può passare da uno stato di
quiete ad uno di moto, se ho un oggetto in moto la forza può cambiare la direzione del moto,
aumentare/diminuire la velocità, riportare l’oggetto in uno stato di quiete e, se l’oggetto è vincolato,
cioè non libero di muoversi nello spazio, la forza può produrre delle deformazioni sull’oggetto.
Se ad un oggetto applico due forze posso sommarle seguendo la regola del parallelogramma, per tre
forze, sommo le prime due poi sommo il vettore ottenuto al terzo vettore forza. Il vettore somma di
tutte le Forze applicate all’oggetto viene definito Risultante delle Forze (R).
Nota: L’intensità della risultante di due forze è maggiore della differenza e minore della somma
delle intensità delle due forze componenti.
|F2| - |F1| | F1 + F2| | F1| + |F2|
I° Principio della Dinamica: Un corpo non soggetto a forze o con R=0, resta in uno stato di quiete
o di moto rettilineo uniforme, rispetto al sistema di riferimento.
Questo principio è anche detto principio d’inerzia e tutti i sistemi di riferimento in cui è valido si
dicono Sistemi di Riferimento Inerziali. Un sistema di riferimento inerziale è quello con origine su
una stella e assi orientati verso altre stelle fisse. Tutti i sistemi di riferimento fermi o in moto
rettilineo uniforme rispetto a questo sistema sono inerziali. Un sistema di riferimento solidale con la
terra non è inerziale in quanto la terra ruota intorno al proprio asse e ruota attorno al sole, quindi ha
un moto che prevede delle accelerazioni, ma dato che le velocità angolari sono relativamente basse,
questo sistema di riferimento può essere considerato inerziale.
CENTRO STUDI PALLAI
PREPARAZIONE PER TUTTI GLI ESAMI UNIVERISTARI DEL TUO CORSO DI LAUREA
LEZIONI INDIVIDUALI PERSONALIZZATE
CORSI COLLETTIVI
Via M. Poggioli, 3 – 00161 Roma – tel. 06.44.36.13.77 - www.pallai.it
II° Principio della Dinamica: Una forza F agente su un corpo produce un’accelerazione
direttamente proporzionale alla forza stessa.
𝐅 = k𝐚
Sperimentalmente si può verificare che la costante di proporzionalità è la massa (m) dell’oggetto
pertanto possiamo scrivere la formula precedente con la:
𝐅 = m𝐚
Il secondo principio della dinamica stabilisce che, applicando una forza F ad un oggetto di massa m
questo subirà un’accelerazione in modulo proporzionale alla forza e inversamente proporzionale
alla massa dell’oggetto, con la stessa direzione e verso della forza. La massa m è una misura
dell’inerzia dei corpi, cioè esprime la “resistenza” che un oggetto oppone ad assumere una certa
accelerazione sotto l’azione di una forza e viene pertanto detta massa inerziale.
Appunti di Fisica – Adriano Nobile
Pagina 14
Note:
L’azione di una forza è indipendente dallo stato di quiete o di moto preesistente
nell’oggetto, cioè la stessa forza che agisce su un corpo in quiete o su un corpo in moto
produrrà sempre la stessa accelerazione.
L’azione di una forza non è modificata dalla contemporanea azione di un’altra forza. In altri
termini una forza risultante R di due forze F1 e F2 produce un’accelerazione a che è la
somma vettoriale delle accelerazioni a1 e a2 che le due forze produrrebbero se agissero da
sole indipendentemente l’una dall’altra.
Anche il II principio è valido solo in un sistema di riferimento inerziale.
Il II principio contiene il I in quanto, se F = 0 allora a = 0 e quindi un corpo non soggetto a
forze persevera in uno stato di quiete o moto rettilineo uniforme.
Usando la formula F = ma possiamo scrivere l’equazione dimensionale della forza e quindi ricavare
le UM in alcuni Sistemi di Unità di Misura:
F = ma = mlt −2
Nel SI e nell’ MKS l’unità di misura della forza è il Newton (simbolo N):
kg ∙ m
s2
Cioè applicando una forza di 1 N ad un oggetto di massa 1 kg otterrò un’accelerazione di 1 m/s2.
Nel sistema CGS l’UM della forza è il dine:
N=
dine =
g ∙ cm
s2
Per passare da N a dine:
1N = 1
kg ∙ m
1000 g ∙ 100 cm
g ∙ cm
g ∙ cm
=
= 100000
= 105 2 = 105 dine
2
2
2
s
s
s
s
III° Principio della Dinamica: ad ogni azione corrisponde una reazione uguale e contraria.
Se spingo un tavolo, applico una forza sul tavolo e allo stesso tempo il tavolo applica una forza su
di me, mi spinge nella direzione opposta.
È anche noto come principio di azione e reazione.
Ora andiamo a vedere alcune forze che ci possono interessare:
Forza Peso: ogni oggetto di massa m lasciato libero di muoversi in prossimità della superficie della
terra cade con accelerazione uguale a g, sarà quindi soggetto ad una forza che lo accelera verso il
basso e che chiameremo peso P:
P = mg
Pertanto dobbiamo distinguere attentamente la massa che è una grandezza scalare ed è una
“proprietà intrinseca” dell’oggetto (ovunque esso si trovi ha sempre lo stesso valore) dal peso che è
una forza, cioè una grandezza vettoriale pertanto con modulo uguale al prodotto di massa per |g|,
direzione lungo la verticale e verso dall’alto verso il basso.
Appunti di Fisica – Adriano Nobile
Pagina 15
Forza di attrazione Gravitazionale: Due particelle di massa m1 e m2 si attraggono con una forza
agente lungo la congiungente i due oggetti, l’intensità è proporzionale al prodotto delle masse e
inversamente proporzionale al quadrato della distanza (R):
𝐅G = G
m1 m2
R2
G è detta costante di gravitazione universale e vale:
G = 6.67 × 10−11
Nm2
kg2
Questa legge è valida qualunque siano gli oggetti che stiamo osservando, dato che il valore della
costante G è molto piccolo l’effetto inizia ad essere rilevante se le masse in gioco sono molto
grandi, ad esempio per i corpi celesti, o se la distanza tra gli oggetti è molto piccola.
Se ad esempio uno degli oggetti è la terra (di massa M) allora la FG rappresenta la forza con cui la
terra attira verso il suo centro (sarebbe più corretto utilizzare la parola Baricentro o centro di massa)
un qualsiasi oggetto di massa m, posto in prossimità della sua superficie, quindi possiamo scrivere:
𝐅G = G
Mm
= ma = mg
R2
Abbiamo riscritto la FG e l’abbiamo uguagliata al prodotto della massa m per l’accelerazione che
subisce l’oggetto che sappiamo essere uguale a g=9,81 m/s2. In prima approssimazione possiamo
dire che R è costante ed è uguale al raggio terrestre (6300 km) in quanto l’oggetto si trova in
prossimità della superficie (massimo qualche centinaio di metri) e questa altezza non influenza
troppo i calcoli. Semplificando per m che compare nei due termini dell’equazione otteniamo:
g=G
M
R2
Forza Elastica: Se applico una forza ad un oggetto vincolato questo si deforma.
Ad esempio se applico una forza ad una molla con un estremo fissato ad un muro questa si allunga
o si accorcia a seconda del verso di applicazione della forza. La deformazione (allungamento o
accorciamento) è proporzionale alla forza applicata. Quando smetto di applicare la forza la molla
torna alla posizione di equilibrio.
Tutti i materiali o gli oggetti che hanno lo
stesso comportamento della molla si
definiscono elastici.
Per il terzo principio della dinamica se io tiro
la molla allora la molla tirerà me con una
forza uguale e contraria a quella che ho
applicato, questa forza viene chiamata forza
elastica ed è espressa dalla legge di Hooke.
La forza elastica è direttamente proporzionale allo spostamento ed ha sempre verso opposto allo
spostamento.
F = -kx
k viene chiamata costante di elasticità della molla e x è la distanza a cui si trova l’oggetto rispetto
alla posizione di equilibrio della molla (O) nella figura x è uguale al segmento OA.
Appunti di Fisica – Adriano Nobile
Pagina 16
Se m è la massa dell’oggetto, dal II principio della dinamica:
m𝐚 = −k∆𝐱
k
introducendo :
𝐚 = − m ∆𝐱
ω=
k
m
avremo:
𝐚 = −ω2 ∆𝐱
che è l’equazione dell’accelerazione del moto armonico.
Un oggetto a cui viene applicata una fora elastica si muoverà di moto armonico con periodo T:
𝑇 = 2𝜋 𝜔 = 2𝜋 𝑚 𝑘
Reazione Vincolare: Quando appoggio un oggetto di massa m su un piano orizzontale, l’oggetto
applica una forza sul tavolo pari al suo peso P lungo la direzione verticale (perpendicolare al piano),
allo stesso tempo, per il III
principio della dinamica, il piano
esercita una forza uguale e
contraria al peso dell’oggetto che
viene chiamata reazione vincolare
R in quanto “vincola” l’oggetto, gli
impedisce di muoversi.
In generale la reazione vincolare R
ha direzione perpendicolare al
piano/vincolo, il modulo è uguale a
quello della componente lungo la
direzione perpendicolare al piano
della risultante delle forze applicate
e verso opposto.
Attrito Statico: Posto un blocco di un qualsiasi materiale su una superficie orizzontale devo
applicare una forza con un modulo
0 se voglio spostarlo, pertanto
esiste una forza che si oppone alla
messa in moto dell’oggetto, questa
forza è l’attrito statico Fas.
L’intensità dell’attrito statico è
proporzionale
alla
reazione
vincolare R:
|𝐅as = K s 𝐑|
Appunti di Fisica – Adriano Nobile
Pagina 17
La direzione della forza di attrito è la stessa della forza che applico per cercare di far muovere
l’oggetto il verso invece è opposto.
Attrito dinamico: Se il blocco si muove sulla superficie la sua velocità diminuirà a meno che io non
applichi una forza per mantenere costante la velocità.
La forza che fa diminuire la velocità è detta forza di attrito dinamico Fad.
Anche in questo caso l’intensità dell’attrito dinamico è proporzionale alla reazione vincolare R:
|𝐅ad = K d 𝐑|
La direzione della forza di attrito è
la stessa dello spostamento e il verso
è opposto.
I coefficienti Ks e Kd sono detti
coefficienti di attrito statico o
dinamico. Ks è molto maggiore di
Kd pertanto l’attrito statico è
maggiore dell’attrito dinamico,
pertanto è più facile mantenere un
oggetto in moto piuttosto che metterlo in moto.
Attrito viscoso: Un oggetto che si muove in un mezzo (aria, acqua …) è sottoposto ad una forza che
si oppone al moto, questa forza è proporzionale alla velocità dell’oggetto rispetto al mezzo (v),
dipende da un coefficiente proprio del mezzo detto di attrito viscoso () e da un coefficiente che
dipende dalla forma dell’oggetto detto lunghezza caratteristica (K).
𝐅𝐚𝐯 = − K𝐯
Forza centripeta: Abbiamo visto che un oggetto che si muove di moto circolare uniforme è
soggetto ad un’accelerazione centripeta (ac), che è la responsabile della variazione della direzione
della velocità. Utilizzando il II principio della dinamica possiamo introdurre la forza centripeta, cioè
la forza che vincola l’oggetto a muoversi lungo una circonferenza impedendogli di “partire” lungo
la direzione tangente.
|𝐯|2
𝐅𝐜 = m𝐚𝐜 = m
= mω2 R
R
CENTRO STUDI PALLAI
PREPARAZIONE PER TUTTI GLI ESAMI UNIVERISTARI DEL TUO CORSO DI LAUREA
LEZIONI INDIVIDUALI PERSONALIZZATE
CORSI COLLETTIVI
Via M. Poggioli, 3 – 00161 Roma – tel. 06.44.36.13.77 - www.pallai.it
Pendolo: Consideriamo un oggetto di massa m vincolato tramite un filo inestensibile o una sbarretta
rigida, di massa trascurabile e lunghezza l, ad un punto O detto centro di sospensione.
Sull’oggetto agiscono sempre solo due forze, il peso P = mg dell’oggetto e la tensione del filo T (la
reazione vincolare).
Quando l’oggetto si trova in A la risultante delle forze applicate è nulla, pertanto:
Appunti di Fisica – Adriano Nobile
Pagina 18
P=T
Quando sposto l’oggetto in B e poi lo lascio libero di muoversi questo si sposta fino a raggiungere
la posizione B e poi torna in B percorrendo un arco di circonferenza di raggio l. L’oggetto oscilla
intorno alla posizione di equilibrio A, in assenza di attriti il moto continuerebbe in eterno.
Nei punti B e B abbiamo, che la risultante delle forze applicate è 0 e quindi per il II principio
della dinamica:
P + T = ma
A questo punto scelgo un opportuno sistema di riferimento sul quale calcolare le componenti delle
forze applicate.
Una direzione è quella del filo, direzione radiale rispetto al moto, l’altra è quella tangente alla
traiettoria.
Nella direzione radiale abbiamo che agiscono la T e la componente radiale della forza peso Pr,
queste due forze si bilanciano e sono pertanto uguali in modulo e contrarie in verso.
Lungo la direzione tangenziale abbiamo che agisce esclusivamente la componente tangenziale della
forza peso Pr.
Geometricamente abbiamo che il triangolo OHB (ipotenusa l e un cateto d) e il triangolo con
ipotenusa P e cateti Pr e Pt sono simili e pertanto possiamo
usare la proporzione:
R:d=P:l
E da questa abbiamo:
𝐑=
dmg
l
E quindi essendo R= ma
d
𝐚= 𝐠
l
Se l’oggetto si è spostato di un angolo piccolo rispetto alla verticale possiamo approssimare d alla
lunghezza dell’arco di circonferenza AB e quindi allo spazio s percorso dall’oggetto. pertanto
eliminando i segni di vettori e quindi introducendo i segni:
a= −
g
s
l
che di nuovo è l’equazione dell’accelerazione di un moto armonico con velocità angolare :
ω=
g
l
e pertanto di periodo:
T = −2π
Appunti di Fisica – Adriano Nobile
l
g
Pagina 19
Il periodo del pendolo dipende solo dalla lunghezza del filo e dal valore dell’accelerazione di
gravità, non dipende dalla massa dell’oggetto ne dall’ampiezza dell’angolo di oscillazione.
LAVORO
Se applico una forza F ad un oggetto e questo subisce uno spostamento s dalla posizione A alla
posizione B allora posso dire che F ha prodotto un lavoro L per spostare l’oggetto da A a B. Il
lavoro è una grandezza scalare e viene definito matematicamente come il prodotto scalare della
forza per lo spostamento:
L = F · s = |F| |s| cos α
Abbiamo che:
se F e s hanno stessa direzione α = 0, cos α = 1 e quindi L = |F| |s|.
se 0 < α < 90° ( la proiezione di F su s ha lo stesso verso di s) L > 0 e si dice lavoro motore.
Se α = 90° F perpendicolare ad s e il lavoro è nullo (cos α = 0).
se 90 < α < 180° ( la proiezione di F su s ha verso opposto a s) L < 0 e si dice lavoro
resistente.
L’ equazione dimensionale del lavoro è:
L = F ∙ s = ml2 t −2
L’UM del lavoro ne SI ( e nel sistema MKS) è il Joule (J):
J=N·m
Mentre nel sistema CGS l’UM è l’erg:
erg = dine · cm
Per passare da J ad erg:
1J= 1N ∙1m= 1
kg ∙ m
1000 g ∙ 100 cm
∙m=1
∙ 100 cm = 105 dine ∙ 100 cm = 107 erg
2
s
s2
Potenza: La potenza è una grandezza scalare ed equivale al lavoro L prodotto o dissipato da un
motore in un certo intervallo di tempo Δt:
P = L/Δt
L’ equazione dimensionale della potenza è:
P =
L
= ml2 t −3
t
L’unità di misura nel SI è il Watt (W).
Appunti di Fisica – Adriano Nobile
Pagina 20
W=
J
s
Nella vita quotidiana usiamo molto i multipli di questa UM, un aspirapolvere ad esempio dissipa
circa 5 kW, cioè il motore dell’aspirapolvere ha bisogno di prendere 5 J al secondo per poter
aspirare la polvere sotto al vostro letto.
Un’altra unità di misura della potenza è il Cavallo Vapore (CV) che equivale alla potenza di un
motore che solleva una massa di 75kg all’altezza di 1m in 1s.
1 CV 735 W
Dall’UM della potenza è possibile introdurre un’altra UM del lavoro, il Wh (Watt ora).
IL CENTRO STUDI PALLAI
PREPARAZIONE AGLI ESAMI UNIVERSITARI
CHIMICA E PROPEDEUTICA BIOCHIMICA- FISICA MEDICA- BIOLOGIA- ISTOLOGIA- BIOCHIMICA… et al.
Via M. Poggioli, 2 – 00161 Roma – tel. 06.44.36.13.77
Energia Cinetica: Un corpo di massa m che in un certo istante ha velocità v possiede una certa
energia cinetica (K o Ec) che equivale al lavoro necessario ad una forza per arrestare il moto
dell’oggetto.
Vogliamo calcolare il lavoro che deve compiere una forza F, costante in modulo, per portare un
corpo di massa m da velocità nulla a velocità v. Se F e s hanno stessa direzione allora l’oggetto si
muove di moto rettilineo uniformemente accelerato:
v=a ∙t
e
s=
1
2
at 2
Dalla prima equazione calcoliamo il tempo e lo sostituiamo nella seconda:
1 v2
s=
2 a
Per definizione di lavoro:
L = F ∙ s = ma ∙ s =
1
m v2
2
Quindi il lavoro che deve compiere la forza F per portare l’oggetto da velocità nulla a velocità v è
1
uguale a 2 mv 2 e questo è anche il lavoro necessario ad una forza opposta ad F per arrestare il moto,
quindi è l’energia cinetica:
K=
1
m v2
2
Teorema dell’Energia Cinetica: Il lavoro compiuto dalla risultante delle forze applicate ad un
oggetto lungo un arco di traiettoria qualsiasi 𝐴𝐵 è uguale alla variazione dell’energia cinetica subita
dall’oggetto nel passare da A a B:
Appunti di Fisica – Adriano Nobile
Pagina 21
LAB = K B − K A
Energia Potenziale: Si dice che un oggetto che si trova in una certa posizione dello spazio ad un
certo istante possiede Energia Potenziale se su di esso stanno agendo delle forze conservative.
Una forza F si definisce conservativa se il lavoro necessario per spostare un oggetto dalla posizione
A alla posizione B non dipende dalla traiettoria seguita dall’oggetto. Analogamente F è
conservativa se il lavoro per spostare un oggetto lungo una traiettoria chiusa è nullo.
Tutte le forze che abbiamo incontrato sono conservative tranne le forze di attrito (forze dissipative).
Andiamo a calcolare l’energia potenziale per alcune delle forze di cui ci siamo occupati:
Energia Potenziale della Forza Peso:
Dimostriamo che è una forza conservativa,
calcoliamo il lavoro di P lungo due percorsi
diversi.
Calcoliamo il lavoro di un oggeto che cade da
altezza h. La forza preso ha la stessa direzione e
lo stesso dello spostamento, pertanto il lavoro è
uguale a:
L = F ∙ s = P ∙ h = mgh
Calcoliamo ora il lavoro della forza peso per un oggetto che si muove da A a C passando per il
punto B. Il segmento AB è lungo l mentre l’altezza AC è uguale ad h (la sessa di prima).
Abbiamo che lungo il tratto A-B l’oggetto si muove lungo un piano inclinato di un angolo il
lavoro della forza peso è:
h
L = P ∙ l = mgl cos π 2 − α = mgl sin α = mgl = mgh
l
Lungo il tratto BC la forza peso e lo spostamento sono perpendicolari pertanto il lavoro della forza
peso è nullo in quel tratto.
Allora il lavoro della forza peso per andare da A a C è uguale a mgh qualunque sia la traiettoria
seguita.
Si dice che un oggetto che si trovi ad un’altezza h (anche su
un piano inclinato) possiede energia potenziale U = mgh,
che rappresenta l’energia che in potenza l’oggetto può
trasformare in energia cinetica.
Il lavoro della forza peso per spostare un oggetto da un
punto ad altezza hA ad un punto ad altezza hb (minore) è:
L = mg hA − hB = mghA − mghB = UA − UB = −∆U
Questa relazione si può vedere graficando la forza peso in funzione dello spostamento (è una
costante), il lavoro non è altro che l’area del rettangolo.
Energia potenziale della forza elastica:
Allo stesso modo graficando la forza elastica –F (era F=-Kx e quindi una retta passante per l’origine
degli assi) in funzione dello spostamento possiamo calcolare l’energia potenziale per un oggetto che
si trova a distanza x1 dalla posizione di equilibrio con la:
Appunti di Fisica – Adriano Nobile
Pagina 22
1
U1 = − Kx12
2
E il lavoro L per andare dalla posizione x1 alla posizione x2:
L=
1
1
1
1
−Kx1 − Kx2 x1 − x2 = − K x1 + x2 x1 − x2 = − Kx12 + Kx22 = U1 − U2 = −∆U
2
2
2
2
CENTRO STUDI PALLAI
PREPARAZIONE PER TUTTI GLI ESAMI UNIVERISTARI DEL TUO CORSO DI LAUREA
LEZIONI INDIVIDUALI PERSONALIZZATE
CORSI COLLETTIVI
Via M. Poggioli, 3 – 00161 Roma – tel. 06.44.36.13.77 - www.pallai.it
Conservazione dell’energia meccanica: Se un oggetto sottoposto all’azione di forze conservative si
muove tra i punti A e B variando la sua velocità allora possiamo calcolare il lavoro prodotto dalle
forze agenti in due diversi modi:
L = K B − K A = ∆K
e
L = UA − UB = −∆U
Uguagliando le due espressioni:
KB – KA = UA- UB
E da questa:
KA + UA = KB + UB
Quindi nel punto A, la somma dell’energia cinetica e dell’energia potenziale posseduta dall’oggetto
è uguale alla somma dell’energia cinetica e dell’energia potenziale nel punto B.
Chiamando energia meccanica la somma dell’energia cinetica e dell’energia potenziale posseduta
da un oggetto in una certa posizione dello spazio possiamo introdurre il principio di conservazione
dell’energia meccanica:
EM = K + U = cost
Appunti di Fisica – Adriano Nobile
Pagina 23
Se un oggetto è sottoposto all’azione di sole forze conservative allora l’energia meccanica
posseduta dall’oggetto all’inizio del moto è uguale all’energia meccanica in un qualunque istante
del moto.
Se agiscono anche forze dissipative allora non vale più il principio di conservazione dell’energia
meccanica.
Avremo che il lavoro compiuto dalle forze è uguale alla somma del lavoro delle forze conservative
(LFC = - U) più quello delle forze dissipative (LFD) e quindi usando il teorema dell’energia cinetica
avremo:
L = LFC + LFD = −∆U + LFD = ∆K
E quindi:
LFD = ∆K + ∆U = K B − K A + UB − UA = EMB − EMA = ∆EM
Il lavoro dissipato dalle forze di attrito è uguale alla variazione di energia meccanica.
EQUILIBRIO
Fin’ora abbiamo trattato i moti di oggetti piccoli, paragonabili a punti materiali e per questi dal
primo principio della dinamica, sappiamo che se non sono soggetti a forze o se la risultante delle
forze applicate all’oggetto è nulla questo resta nel suo stato di equilibrio (fermo o in moto rettilineo
uniforme).
Esistono 3 diversi tipi di equilibrio (vedi figura sotto):
Equilibrio Stabile: Se sposto l’oggetto dalla posizione di equilibrio le forze agenti su di esso
tendono a riportarlo verso la posizione iniziale.
Equilibrio instabile: Se sposto l’oggetto dalla posizione di equilibrio le forze agenti su di
esso tendono ad allontanarlo sempre di più dalla posizione iniziale.
Equilibrio indifferente: Tutti i punti vicino alla posizione di equilibrio sono comunque
posizioni di equilibrio.
Se anziché di oggetti puntiformi ci occupiamo del moto di corpi rigidi le cose si complicano un po’.
Innanzitutto definiamo cos’è un corpo rigido, immaginiamo una sbarra metallica, la dividiamo in
tanti piccoli cubetti ognuno dei quali può essere considerato un punto. Tutti questi punti hanno però
la caratteristica di dover mantenere la loro distanza relativa fissa.
Ora immaginiamo di applicare due forze con la stessa intensità, la stessa direzione e verso opposto
ai due estremi della sbarretta (vedi figura). La risultante delle forze è nulla ma la sbarretta inizia a
ruotare, non è in equilibrio, (moto circolare, c’è un’accelerazione).
Per caratterizzare l’equilibrio dei corpi rigidi devo definire una nuova GF vettoriale, il momento di
una forza rispetto ad un punto O.
Appunti di Fisica – Adriano Nobile
Pagina 24
Ho una forza F applicata in un punto P, considero un punto O che viene chiamato polo (può essere
un punto qualunque nello spazio, in genere vengono scelti punti particolari che sono necessari a
descrivere il moto). Chiamo r il vettore OP e definisco M il momento della forza F rispetto al polo
O il prodotto vettoriale:
𝐌=𝐫 ×𝐅
La direzione del vettore M è quella perpendicolare al piano definito da F e r e il verso e quello piedi
testa dell’osservatore che vede ruotare il vettore r in senso antiorario percorrendo l’angolo minore
di 180° per sovrapporsi al vettore F.
Il modulo di M è dato dalla:
𝐌 = 𝐅 𝐫 sin α = F ∙ b
Dove è l’angolo compreso tra F e r e b = r sen viene chiamato braccio della forza e rappresenta
la distanza dal punto O alla retta su cui giace la forza F.
Un corpo rigido si trova in una posizione di equilibrio se la risultante delle forze applicate R è nulla
e se il momento risultante MR (la somma di tutti i momenti delle singole forze) delle forze applicate
è nullo:
R=0
Appunti di Fisica – Adriano Nobile
e
MR = 0
Pagina 25