Università degli Studi di Cassino e
del Lazio Meridionale
SISTEMI DI INTEGRAZIONE
ELETTRONICA
I sensori
Docente: Luigi Ferrigno
[email protected]
Sensori e Trasduttori
Il sensore è il primo elemento della catena di misura.
Ha il compito di convertire la grandezza fisica da misurare
(misurando) in un’altra più facilmente trattabile.
Il trasduttore è un dispositivo sensibile che fornisce un
segnale elettrico misurabile in risposta ad uno specifico
misurando.
Un trasduttore è un sensore ma un sensore non è
necessariamente un trasduttore
2
Sensori e Trasduttori
Se il sensore non è un trasduttore può essere chiamato corpo
di prova e richiedere in cascata un trasduttore
misurando
Sensore
misurando
primario
(corpo di prova)
secondario
Trasduttore
segnale
elettrico
3
Trasduttori attivi e passivi
Un trasduttore può essere attivo o passivo:
•
Attivo se l’effetto fisico su cui è basato assicura la trasformazione in
energia elettrica dell’energia propria del misurando (termica,
meccanica, d’irraggiamento, …).
Esempi: Termoelettrico (termocoppia), Piroelettrico (cristalli la cui
polarizzazione dipende dalla temperatura), …
•
Passivo se l’effetto del misurando si traduce in una
variazione d’impedenza dell’elemento sensibile.
Esempi: estensimetri, magnetici, …
4
Classificazione dei trasduttori
• Attivi / passivi
• In base alla grandezza misurata: sensori di temperatura,
umidità, illuminamento, velocità, …
• In base alla grandezza che forniscono in uscita: trasduttori
resistivi, induttivi, capacitivi, in tensione, in corrente, …
• Analogici / digitali
5
Circuiti di condizionamento
Un trasduttore è
condizionamento.
completato
dal
circuito
di
Trasduttore passivo: il circuito di condizionamento è
indispensabile per la generazione del segnale elettrico
(montaggio).
Trasduttore attivo: il circuito di condizionamento ha il
compito di adattare i parametri dell’energia elettrica,
generata dal trasduttore, alle caratteristiche d’ingresso del
sistema di misura (condizionamento del segnale).
6
Varietà dei sensori
Physical principle
Resistive
The variation if the sensing element electric
resistance depends on the measurand.
Typical application
Measurand
Output
Thermistor or resistance thermometer
Potentiometer
Hot-wire anemometer
Resistive hygrometer
Chemioresistor
Temperature
Displacement, force, pressure
Flow
Humidity
Presence of gas
Parallel-plate capacitor sensor
Rotary-plate capacitor sensor
Differential capacitor
Capacitance manometer
Humidity sensor
Capacitive diaphragm
Displacement, force, liquid level, pressure
Displacement, force, angular position, torque
Small displacement
Very low pressure
Moisture
Pressure
Inductive
The sensing element inductance depends on the
measurand.
Linear variable differential transformer
Self inductance sensor
Eddy current sensor
Displacement, torque
Displacement, torque, liquid level
Position, conductivity, thickness, cracks in materials
Inductance or change in
inductance
Reluctive
The variation in the reluctance path between two
or more coil depends on the measurand.
Linear variable differential transformer
Rotary variable differential transformer
Microsyn
Resolver
Syncro
Reluctive diaphragm
Linear displacement
Angular rotation
Angular displacement
Position
Position, torque
Pressure
Voltage
Voltage
Voltage
Voltage
Voltage
Change in reluctance
Electromagnetic
In any circuit capturing a magnetic flux,
whenever the flux changes an electromotive force
is inducted. (Faraday law)
Linear velocity sensor
Flowmeter
Tachometer generator
Torque sensor
Linear velocity
Flow
Angular speed
Torque
Piezoresistive effect
Resistance of the sensing element depends on the
strain.
Strain gauge
Stress, strain, Fluid pressure, displacement, force
Change in resistance
Hall effect
If the sensing element, carrying current, is put in a
magnetic field a differential in electric potential
among its sides is generated.
Gaussmeter
Wattmeter
Magnetic field, displacement
Power
Voltage
Capacitive
The sensing element capacitance depends on the
measurand.
Change in resistance
Capacitance or change in
capacitance
Voltage
7
Varietà dei sensori
Magnetoresistive effect
Resistance of the sensing element depends on the
strain.
Change in resistance
Magnetoresistor
Magnetic field, linear and angular displacement,
proximity, position
Piezoelectric effect
Subjecting the sensing element to stress there is a
generation of electric charge.
Vibration cables
Active and passive force sensor
Piezoelectric microphone
Piezoelectric temperature sensor
Vibration
Force
Ultrasonic waves
Temperature
Voltage or charge
Pyroelectric effect
The sensing element generates an electric charge
in response to a heat flow.
Heat flowmeter
Pyroelectric sensor
Change in the temperature
Voltage
Thermoelectric effect
When there is a difference in temperature
between two junctions of different metals, a
difference of electric potential is generated.
Thermocouples, thermopiles, infrared
pyrometer
Difference of temperature
Voltage
Ionization effect
The sensing element when exposed to the
measurand becomes ionized.
Electrolytic sensor
Vacuum gages
Chemical ionizer
Electrical conductivity, pH
Pressure
Atomic radiation
Current
Photoresistive
The electric resistance of the sensing element is
caused by the incidence of optical radiation.
Photoresistor, photodiode, phototransistor,
photofet
Light, position, motion, sound flow, force
Change in resistance
Photovoltaic effect
When the sensing element is subject to a radiation
it generates an electric potential
Flame photometer
Light detector
Pyrometers
Light intensity
Light, position, motion, sound flow, force
Temperature
Voltage
Acoustooptic effect
The interaction of an optical wave with an
acoustic wave produces a new optical wave
Acoustic optic deflection, Bragg cell
Physical vibration
Phase modulated voltage
signal
Doppler effect
The apparent frequency of a wave train changes
in dependence of the relative motion between the
source of the train and the observer.
Remote sensor of linear velocity, Doppler
radar, laser Doppler velocimeter
Relative velocity
Thermal radiation
An object emanes thermal radiation, which
intensity is related to its temperature
Pyrometer
Temperature
Frequency
Voltage
8
Sensori Resistivi
• La variazione della grandezza in ingresso è
legata alla variazione della resistenza esibita
dal sensore ai suoi capi.
• Molto comuni, perché sono numerose le
grandezze fisiche in grado di alterare la
resistenza elettrica di un materiale. Sensori per
la misura di temperature si usano anche per
compensare facilmente sistemi che misurano
altre grandezze.
9
Sensori Resistivi
• Sensori a grande variazione di resistenza:
– Potenziometri
• Sensori a piccola variazione di resistenza:
– estensimetri (piezoresistenze)
– Termoresistenze (RTD) e termistori
10
Potenziometro per misure di posizione
(displacement)
R
L
x
A
L x
R
Il più semplice sensore di posizione e il potenziometro: esso converte una
variazione di distanza (lineare od angolare) in una variazione di resistenza. Tale
variazione non è di per se direttamente misurabile, ma impone l’uso di un
circuito di condizionamento.
I dispositivi potenziometrici soffrono di problemi legati all’attrito meccanico,
limitata risoluzione, e grande rumore termico.
11
Estensimetri
• Presentano una variazione di resistenza
legata alla deformazione meccanica cui sono
sottoposti.
• La grandezza
dl
l
rappresenta la variazione percentuale della
deformazione
ed
è
detta
strain
(deformazione).
• Sebbene sia adimensionale spesso si
estprime in με (“microstrain”, μm/m).
12
Estensimetri
Vantaggi:
Svantaggi:
• Dimensioni ridotte
• Ancoraggio meccanico: la forza deve essere
trasmessa tutta all’estensimetro.
• Elevata linearità
• Bassa impedenza
• Dipendenza dalla temperatura (~50 με /〬C).
Si risolve con montaggi differenziali.
• Forza termoelettrica che appare ai capi di
giunzioni bimetalliche. Si risolve con una doppia
misura a polarità invertita.
13
Resistive Temperature Detector (RTD)
• Se sono realizzati in platino sono
chiamati anche PRT, Platinum
Resistence Thermometer.
• Nei metalli, un aumento di temperatura
fa diminuire la velocità media degli
elettroni, ed aumenta R.
=> Coefficiente di temperatura positivo.
• Relazione generale:
R R0 1 1T 2T 2 ... N T N
• A seconda del metallo, esiste un range
di linearità, in cui:
R R0 1 T
14
Resistive Temperature Detector (RTD)
Tipicamente si usano:
• Platino (-200°C, +850 ° C)
• Rame (-200 °C,+260 °C)
• Nichel (-80 °C,+320 °C)
Disponibili con diversi output range (100 Ω – 2000 Ω).
Grazie a valori di resistenza elevati:
Minore influenza delle resistenze dei collegamenti
Cavi più lunghi.
15
Resistive Temperature Detector (RTD)
Vantaggi:
• Elevata sensibilità (10 volte maggiore rispetto alle
termocoppie)
• Elevate prestazioni in termini di incertezza
• Ripetitività
• Basso costo (Rame e Nichel)
Svantaggi:
• Autoriscaldamento
Altre applicazioni:
• Misura della velocità di fluidi (hot wire anemometer)
16
Termistori (Thermally Sensistive Resistor)
Realizzati con semiconduttori.
• NTC: coefficiente di temperatura negativo.
• PTC : coefficiente di temperatura positivo.
-t°
Principio di funzionamento:
• Aumento del numero di portatori con T (coeff. negativo);
• Con opportuni droganti si ottiene un coefficiente positivo.
17
Condizionamento di trasduttori passivi
(in particolare resistivi)
• Il metodo voltamperometrico è inadeguato per piccole resistenze
• Il metodo della caduta di potenziale richiede 2 misurazioni ed un
resistore campione: difficilmente applicabile a sensori.
Si impiegano:
Metodi potenziometrici.
Metodi di ponte.
Oscillatori.
18
Sensori induttivi e capacitivi
• Rispetto ai sensori resistivi, spesso introducono minori
effetti di consumo
• Intrinsecamente
differenziali
non
lineari,
richiedono
montaggi
• Richiedono alimentazione ac
• Limite in frequenza (fmisurando < falimentazione )
• Diffusi come sensori di posizione, spostamento, prossimità,
livello, …
19
Sensori di livello
Misura della variazione di impedenza tra
due elettrodi immersi in un liquido.
Misura del livello di liquidi
elettroconduttivi attraverso una
variazione di induttanza.
20
La capacità come sensore
A
C 0
d
Variazione di induttanza
A
L 0 n 2
21
Sensori capacitivi di spostamento lineare
A
C
d
Principio fisico: variazione di C rispetto
ad una delle tre grandezze ε, A, d.
22
Induzione elettromagnetica (Faraday 1791-1867)
- E’ possibile risalire a spostamenti, deformazioni, forze,
pressioni, velocità (v)
e nBv
e MN B v
eMN proporzionale a vm
eu k v
Condotta non metallica
Fluido conduttore
e AB k
23
Condizionamento per sensori induttivi e capacitivi
Montaggi potenziometrici.
Montaggi galvanometrici.
Metodi di ponte.
Oscillatori.
24
Sensori attivi
• Effetto termoelettrico
Una f.e.m. funzione della temperatura appare ai capi di giunzioni tra metalli diversi.
• Effetto piezoelettrico
Una polarizzazione elettrica proporzionale ad una sollecitazione meccanica appare in particolari
materiali.
• Effetto piroelettrico
Una polarizzazione elettrica proporzionale alla temperatura appare in particolari materiali.
• Effetto fotovoltaico
Insorgere di una tensione proporzionale alla radiazione e.m. incidente
• …
25
Effetti termoelettrici (Seebeck 1826, Peltier 1834)
• Un conduttore, con una estremità posta ad una
temperatura T1 e con l’ altra ad una temperatura T2,
diventa sede di un passaggio di energia dalla parte calda
alla parte fredda
• il gradiente termico genera un campo elettrico che si
manifesta con un incremento di tensione
dVa a dT
26
Usando due materiali differenti A e B si
ha
AB = A - B
dVAB= AB dT
Per ottenere la migliore sensibilità
si scelgono materiali con coefficienti di segno opposto
• Effetto Peltier: Consiste nel manifestarsi di una
certa quantità di calore, assorbita o ceduta da una
termocoppia quando questa è attraversata da
corrente elettrica
• esempio: frigoriferi termoelettrici di piccole
dimensioni e limitato assorbimento di potenza
27
Termocoppie
Tipo
Materiale bimetallo
Campo T°C
Vu [mV]
Caratteristiche
J
Ferro-Costantana
-200…780
30 con
T=500°C
Economica
T
Rame-Costantana
-200…400
15 con
T=320°C
Sens.:45V/°C
Piccole
dimensioni
E
Cromel-Costantana
-200…1250
>70 con
T=1000°C
Elevata f.e.m.
S
Pt-Pt90%, Rd10%
0…1760
10 con
T=1000°C
Robusta,
affidabile,
costosa, poco
sensibile
C
TungstenoTungsteno,Iridio
0…2400
Dipende dalla %
della lega
Alta
temperatura
28
Termocoppie: l’effetto Seebeck
Ai capi di una giunzione tra due metalli diversi A e B appare
una f.e.m. che dipende dalla natura dei metalli e dalla
temperatura TX
V
B
Tx
A
29
Termocoppie: effetto Peltier ed effetto Thomson
Si può dimostrare che l’effetto Seebeck è una conseguenza
dei seguenti:
• Effetto Peltier: una giunzione di due metalli diversi si
riscalda o raffredda se è attraversata da una corrente.
• Effetto
Thomson:
un
conduttore
di
composizione
omogenea, ma con temperatura non omogenea, cede o
assorbe calore se attraversato da corrente.
30
Tipi di termocoppie
Codice ANSI
Composizione
Range ºC
mV @ full range
B
Pt / Rhodium
38 – 1800
3.6
C
W / rhenium
0 – 2300
37.0
E
Chromel / Constantan
0 – 982
75.0
J
Iron / Constantan
0 – 760
43.0
K
Chromel / Alumel
-184 – 1260
56.0
N
Nicrosil (Ni/Cr/Si) / Nisil (Ni/Si/Mg)
-270 – 1300
51.8
R
Pt / Rhodium
0 – 1593
18.7
S
Pt / Rhodium
0 – 1538
16.0
T
Cu / Constantan
-184 – 400
26.0
31
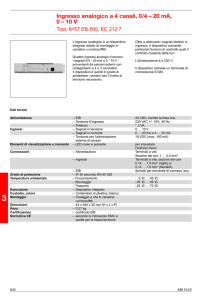
Sistema di acquisizione dati per termocoppie
• Un termistore,
più canali T/C
• La CPU opera
la linearizzazione
OHMs
Conv.
Isolators
HI
uP
LO
Integrating
A/D
Floating Circuitry
uP
I/O
(HP-IB,
RS-232)
ROM
Lookup
To
Computer
Grounded Circuitry
32
Effetto piezoelettrico (Curie, 1880)
• Esiste in cristalli naturali (quarzo) e in ceramiche e
polimeri artificiali opportunamente polarizzati (anisotropia
del quarzo)
• Consiste nella generazione di carica elettrica da parte di
un materiale cristallino sottoposto ad una sollecitazione
meccanica
• E’ un effetto reversibile:
energia meccanica
energia elettrica
e u kF
e u f .e.m. ai morsetti A e B
F Forza applicata
33
Effetto piroelettrico
• Tra i cristalli piezoelettrici ve ne sono alcuni (in 10 delle
32 classi cristalline) che presentano un’unica direzione
privilegiata per l’orientamento dei momenti elettrici.
• Consiste nella generazione di carica elettrica per effetto di
un flusso di calore (cariche indotte termicamente).
• Il materiale non necessita di eccitazione esterna
• contrariamente ai termoelettrici (es. termocoppie), le
cariche vengono generate in risposta ad una variazione di
temperatura
34
Effetto piezoresistivo (Strain-gauge, Strain-gage)
E’ l’effetto di variazione della resistività di un opportuno
materiale quando è soggetto ad una deformazione dovuta ad
uno sforzo ad esso applicato (ridotto nei materiali metallici, più
consistente nei semiconduttori).
F
d
E
a
•
Sforzo:
•
•
•
dove E = modulo di Young del materiale
F = forza applicata
a = sezione interessata
d
È chiamato tensione (deformazione normalizzata)
35
Effetto piezoresistivo (2)
• Il conduttore cilindrico che subisce una elongazione d
(supponendo che il volume V rimanga costante) possiede
una resistenza pari a:
2
R
V
da cui si ricava la sensibilità:
dR
2
d
V
che è tanto migliore quanto più lungo e stretto è il
cilindro e quanto maggiore è la resistività del materiale.
Si puo’ esprimere come:
dR
Se
R
Se = Sensibilità (gauge factor) [2-6 per metalli, 40200 per semiconduttori]
• applicazioni: accelerometri, microfoni.
36
Effetto piezoresistivo (3)
• E’ formato da un resistore saldato su un substrato
portante elastico, che viene fissato sull’ oggetto che si
deforma
• il resistore è in tal modo isolato elettricamente dall’
oggetto
• il coefficiente di espansione termica del substrato deve
essere coincidente con quello del materiale di cui è fatto il
resistore
• la resistenza varia in genere da 100 a migliaia di ohm.
• Per avere una buona sensibilità il sensore deve avere
lunghi segmenti longitudinali e corti segmenti trasversali,
così la sensibilità trasversale è solo di pochi percento di
quella longitudinale
37
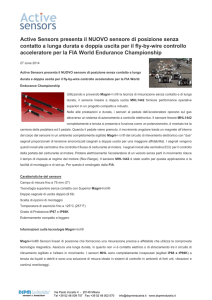
Effetto Hall
(E.Hall 1879)
• In un materiale conduttore sottoposto ad un campo di
induzione magnetica Bz normale al flusso di una corrente
elettrica di intensità Ix, si manifesta una d.d.p. Vy in
direzione perpendicolare alle direzioni sia di Bz sia di Ix.
• Il fenomeno è dovuto al fatto che le cariche elettriche, in
movimento per la presenza della corrente, si accumulano
su di una faccia del materiale per effetto del campo
magnetico, finchè non si determina un campo elettrico
agente sugli elettroni tale da opporsi e compensare la
forza dovuta al campo magnetico.
• Sensori Hall sono usati per rilevare campi magnetici,
posizione e spostamento di oggetti
38
•
•
•
•
La tensione di Hall può essere
prelevata con opportuni elettrodi.
(Bassa nei conduttori e negli isolanti,
buona nei semiconduttori)
non sono molto lineari rispetto all’
intensità del campo B e quindi
richiedono una calibrazione per
misure di precisione
per misure di posizione e di
spostamento devono essere forniti
con una sorgente di campo
magnetico ed una interfaccia
elettronica
Un dispositivo commerciale che
utilizza arseniuro di indio ha una
corrente di controllo di 0.1 A e
presenta una tensione di Hall pari a
0.15 V per un campo di induzione
magnetica di 1 Wb/m2 (T)
39
Effetto fotoconduttivo
(Sensori passivi)
• Determina un passaggio di corrente elettrica in materiali
investiti da radiazioni di varia lunghezza d’onda.
• Dovuto alla variazione della conduttività di materiali isolanti e
semiconduttori.
• La radiazione incidente consente il passaggio di elettroni da
uno stato di legame ad uno libero, questi non hanno energia
sufficiente per uscire dal materiale (fotoemissione) ma
contibuiscono alla conduzione facendo diminuire la resistività.
• E’ necessario collegare il sensore ad un generatore di tensione
per avere un flusso di corrente elettrica variabile con la
radiazione incidente.
40
Effetto fotovoltaico
(Sensori attivi)
• Conseguente alla conversione dell’energia radiante in energia
elettrica che consente la realizzazione di celle solari.
• Si presenta nelle giunzioni p-n dei semiconduttori, sottoposte a
radiazioni che danno luogo alla comparsa di una f.e.m.
• Illuminando la giunzione si producono coppie elettroni-buche.
• Materiali tipici sono selenio-ferro e rame-(ossido di rame)
• Fotodiodi o fototransitor sono elementi fotovoltaici usati come
interruttori nei quali piccole quantità di luce sono in grado di
produrre la commutazione del circuito dalla condizione di
minima corrente a quella di corrente elevata
41
Sistemi ad ultrasuoni (Effetto Doppler, 1842)
• Consiste nella variazione di frequenza delle onde acustiche,
ottiche , radio dovuta al moto relativo tra sorgente e ricevitore
delle onde.
f1 f 2 k v
f1 = Frequenza dell’onda incidente
f2 = Frequenza dell’onda riflessa
v = Velocità media del fluido
42
Sistemi ad ultrasuoni (tempo di volo)
• Misura della velocità di un fluido all’interno di un
condotto
• Controlli non distruttivi: misura delle inclusioni in pezzi
metallici
• Trasmettitore e ricevitore sono sensori piezoelettrici che
funzionano ad impulso o ad onda continua.
d
t
;
cv
2fd
cv
43
Sensori digitali: gli encoder incrementali
• Misure di posizione lineare ed angolare.
• Il rilevamento dei settori può essere magnetico, elettrico
oppure ottico.
• La misura è incrementale (problemi).
44
Encoder assoluti
10011111
Le regioni sono univocamente contraddistinte da
una proprietà: ad es. un codice binario.
45
ENCODER INCREMENTALI
• L'elemento fotosensibile ( un
fotodiodo o un fototransistor)
genera un treno di impulsi ed il
loro numero è pari al numero delle
zone trasparenti, alternate alle
scure, intercettate dal blocco
emettitore-ricevitore .
• Il conteggio di questi impulsi
consente di individuare la rotazione
compiuta dal disco
• Un encoder in cui sia presente solo una serie di feritoie non
consente di individuare il verso in cui il disco ruota. Viene
ricavata una seconda serie di feritoie, sfalsata rispetto alla prima
di un quarto di passo, essendo il passo la distanza tra due zone
trasparenti successive. E' ovviamente necessaria la presenza di
una seconda sorgente luminosa e di un secondo sensore.
Encoder assoluti
In questi encoder non si ha una
semplice successione di zone
chiare e di zone scure, ma le
zone chiare e quelle scure,
rappresentano, lette su una
linea perpendicolare alle piste
o su un raggio una parola in
un certo codice binario.
0
7
6
5
4
3
• Un codice binario puro non è tuttavia
adatto ad essere utilizzato in un encoder.
Si ha che in alcune posizioni, passando da
un numero binario al successivo, varia più
di una cifra. Ad esempio passando dal n. 3
(011) al n. 4 (100) si ha una variazione
contemporanea di tutte e tre le cifre.
Co d ice G ray
ENCODER INCREMENTALI ED
ENCODER
ASSOLUTI
ENCODER ASSOLUTO:
INCREMENTALE:
contando gli impulsi permette
di valutare lo spostamento
rispetto ad una posizione
iniziale
fornisce la posizione assoluta
fotorivelatori
LED
fotorivelatore
tracce
ogni livello ha una risoluzione doppia rispetto a quello inferiore; con 10 tracce
vengo ad avere una risoluzione di 210=1024 impulsi per giro (nota: i segnali
provenienti dai fotorivelatori possono essere interpretati direttamente come
una codifica binaria della posizione)
SENSORI DI VELOCITA’
• Un’altra grandezza fisica di notevole
importanza nelle applicazioni e negli
automatismi è la velocità. Per realizzare
trasduttori di velocità lineare o angolare
possono essere utilizzati dispositivi
elettromeccanici come la dinamo
tachimetrica oppure dei tachimetri
elettronici.
•
•
I tachimetri elettronici basano il loro funzionamento su un encoder che
fornisce una sequenza di impulsi grazie a una coppia led-fotodiodo in
genere integrati nell’encoder.
I tachimetri digitali possiedono un generatore di clock il cui compito è di
fornire una finestra temporale di durata costante che abilita il conteggio
di un contatore.
• Accanto alla versione digitale che consente comunque un
immediato interfacciamento con microcontrollori è
possibile realizzare un analogo circuito analogico.
• Gli impulsi provenienti dall’encoder sono squadrati da un
circuito a trigger di Smidth, poi, tramite un convertitore
frequenza tensione, gli impulsi sono trasformati in una
tensione proporzionale alla frequenza e quindi alla velocità
dell’encoder.
La dinamo tachimetrica
• La dinamo tachimetrica è un piccolo
generatore di corrente continua. Nello
statore è presente un magnete permanente.
Il rotore racchiude l’avvolgimento indotto.
Rispetto le tradizionali dinamo si pone
molta cura nella costruzione per evitare
attriti e eccentricità che falserebbero la
lettura.
• E’ importante nell’utilizzo di far lavorare la
dinamo tachimetrica a vuoto per evitare che
la misura sia falsata dalle cadute di tensione
sulla resistenza degli avvolgimenti del
rotore.
N
+
+
+
+
+ + + +
S
+
• Si ricorda che una spira conduttrice interessata da
un flusso variabile nel tempo produce ai suoi capi
una f.e.m.
• l’andamento di tale forza elettromotrice è
sinusoidale.
• Ora ciascun avvolgimento contribuisce alla
tensione complessivo con una propria tensione ed
ogni f.e.m. sarà sfasata rispetto la precedente
• La somma di queste sinusoidi sfasate fornisce una
tensione pressoché continua ma che presenta una
certa ondulazione, la tensione, pertanto, deve
essere filtrata per evitare problemi nei sistemi di
controllo
• La tensione continua in uscita è legata alla velocità
di rotazione dalla relazione
• dove KD è la costante della dinamo mentre è la
velocità angolare in giri /min.
• Per le dinamo tachimetriche commerciali la KD
vale 6090 V per 1000 giri/min
TACHIMETRI A CORRENTE CONTINUA
strutturalmente sono dei piccoli generatori in corrente continua
eccitati con magneti permanenti (AlNiCo: stabilità termica)
V kΦn
n: n° di giri/min
scostamenti dalla proporzionalità:
• dissimmetrie costruttive (squilibrio del rotore, irregolarità del
traferro, ecc.)
• caduta di tensione alle spazzole (la corrente assorbita deve essere
piccola per evitare l’effetto della reazione di indotto): si usano
quindi spazzole con basse cadute (contenenti polvere di Ag)
errore di linearità =V/ VM : massimo
scostamento V dalla retta ideale,
riferito al valore di fondo scala VM
scostamenti tra la caratteristica reale e
ideale di un tachimetro in c.c.
• Ci sono diversi metodi per misurare gli
sforzi, molti dei quali sono basati su misure
di spostamento.
• Gli strain gauge di tipo elettrico realizzano
una misura di tipo mono o bidimensionale,.
•
Sensori piezoelettrici
• si basano sulla misura della carica elettrica
che compare sulla superficie di cristalli
speciali (quarzi, topazi, sale di Rochelle)
quando sono sottoposti a stress meccanici.
Sensori ottici
• I principali sensori ottici sono il fotodiodo, i
fototransistor e le fotoresistenze.
• simbolo del fotodiodo e del fototransistor.
• I fotodiodi basano il loro funzionamento sul fatto
che in polarizzazione inversa la corrente inversa
aumenta se si illumina la giunzione.
• Infatti, i portatori minoritari, elettroni nella zona p
e lacune in n, si liberano dal legame chimico
passando dalla banda di valenza a quella di
conduzione in misura maggiore se colpiti da un
quanto energetico sufficiente a fargli compiere il
balzo.
• Normalmente i diodi sono contenuti in
contenitori oscuri per cui l’unico contributo
per tale passaggio di banda è legato al
calore, se la giunzione è resa trasparente o
meglio si concentra la luce tramite una lente
sulla giunzione si aumenta l’intensità di tali
portatori all’aumentare dell’illuminamento.
• La relazione che esprime la corrente
I I L I 0 (e
qV
kT
1)
+
+
+
++++++++++
n
-- - - -- - -- -
fotodiodo
p
-
La misura di distanza con sensori ottivci
Verranno trattati due metodologie differenti per effettuare misure di
distanza utilizzando un laser:
• Misura basata sulla triangolazione
• Misura basata sul tempo di volo
Queste sono per certi versi duali e presentano, quindi, campi applicativi
molto differenti.
Diodo laser
In entrambi i casi, l’elemento alla base di questi sensori è il diodo laser. Il
diodo converte un segnale elettrico in un segnale luminoso.
Riflessione nei diversi materiali
Riflessione diffusa in accordo
con la legge di Lambert.
Riflessione totale
Riflessione catottrica
Sensori basati sulla triangolazione
Il principio di funzionamento è il seguente:
1.
Un raggio laser colpisce il bersaglio e
viene riflesso (in modo diffuso).
2.
Il punto colpito viene messo a fuoco
da lenti su un vettore CCD.
3.
In base alla posizione del punto sul
vettore si può determinare la distanza
del bersaglio.
D1 è la distanza di riferimento (lo zero).
D2 è il range delle misure.
Determinazione della distanza
Dobbiamo calcolare d conoscendo
h:
a b tg
tg
a d tg d b
tg
h r tg ( )
Nel caso si utilizzasse il sensore
con un PC sarebbe sufficiente
mandare attraverso l’RS232 i
valori di h e lasciare che si occupi
calcolatore di ricavare il valore
della misura.
il
Dati tecnici
Sensori di questo tipo presentano le seguenti caratteristiche:
•
Misura senza contatto
•
Lunghezza d’onda del laser di 670nm (rosso)
•
Ampie distanze fra sensore e target (50-250mm) (D1)
•
Range di misura da ±2 a ±100mm (D2)
•
Precisione: 0,005% f.s.
•
Data-rate circa di 10KHz
•
Linearità dello 0.03% f.s.
•
Piccolo punto di misura (100m)
•
Temperatura di funzionamento da 0° a 40°C
Cose da ricordare per l’impiego
•
L'area della trasmissione e riflessione del raggio deve essere pulita
•
Il sensore ha dimensioni relativamente grandi (120x120x30mm)
•
Il laser deve essere orientato
in modo da evitare che gli
spigoli non oscurino il laser
(shadowing effect)
•
La misura è affetta da errori
dovuti ad un “disallineamento”
Possibili applicazioni
Con questo sensore, nei processi industriali, è possibili misurare:
1.
vibrazioni, gioco,…
2.
distanza, posizione,…
3.
flessione, deformazione,…
4.
dimensioni, rispetto di tolleranze,…
5.
deformazioni,…
6.
controllo di qualità,…
Esempio: misura del livello idrostatico
Vogliamo utilizzare un sensore basato sul laser per misurare l’altezza di un
liquido (acqua) contenuto in un recipiente.
Il sensore è tale per cui il riferimento
è a distanza b=40mm con un angolo
28°. Possiamo calcolare la distanza:
a = b tg
Se nel recipiente mettiamo un liquido
il laser viene rifratto. A seconda del livello
del liquido il laser compie una traiettoria
più o meno lunga ed in questo modo si
riesce a misurare il livello del liquido senza
che vari la distanza fra il sensore ed il fondo
che è la superficie di riflessione.
Per prima cosa dobbiamo tarare il sensore ovvero trovare un livello del
liquido di riferimento. Sappiamo che il laser ha una lunghezza d’onda
l=670nm per cui n=1,33. Calcoliamo :
sin = n sin , = 20,67°
Quindi:
f tg d tg
f b d T d
tg
tg
tg
T d 1
b
tg
T 0,29 d 40mm
È stato scelto d =15mm e T=44.4mm. Il sensore restituisce 1V per mm in
aria ed in questo caso 0.3V per mm.
Un esempio di misura fatto con questo sensore. Supponiamo di avere due
serbatoi a due livelli differenti. Supponiamo di aprire il rubinetto fra questi
serbatoi in un certo istante. Queste sono le misure che otterremmo:
Sensori basati sul tempo di volo
Un diodo laser trasforma un treno d’impulsi in un segnale luminoso. Parte
dell’eco del segnale colpisce un foto diodo che lo trasforma in un segnale
elettrico. L’intervallo di tempo fra l’impulso trasmesso e quello ricevuto
viene “contato” da un clock la cui frequenza stabilisce la precisione
minima apprezzabile dallo strumento.
In genere questi sensori danno una misura non solo della distanza ma
anche dell’intensità con cui è “tornato” il laser.
Principio di funzionamento
In generale quella che viene misurata è la distanza del sensore dall’ultimo
bersaglio incontrato dal laser. Consideriamo i seguenti diagrammi
temporali:
Specifiche tecniche
Sensori di questo tipo sono caratterizzati da:
• Numero massimo di bersagli illimitato
• Minima distanza fra due bersagli dipende dell’ampiezza dell’eco (2-5m)
• Distanza massima dai 100 m a circa 1Km
• Distanza minima di circa 2m
• Precisione di ±2,5cm, nel caso dell’ultimo bersaglio di 10cm
In particolare notiamo che dalla distanza massima e dalla precisione
possiamo avere un’idea del periodo del segnale che pilota il diodo laser
del clock:
8
c
3 10
fl
1MHz
2
300m 3 10
c
3 108
f ck
10GHz
2
3cm 3 10
Esempio di misura
Consideriamo un bersaglio posto a circa 35m. Facciamo delle misure in
caso neve fra il sensore e il bersaglio. Quello che otteniamo con sensori di
questo tipo è:
Questi sensori restituiscono anche la distanza dell’ultimo bersaglio dal
precedente.
Variazioni di distanza massima misurabile
La portata del sensore è funzione sia del materiale del bersaglio (del suo
coefficiente di riflessione ) che delle condizioni atmosferiche: