CAPITOLO 4
EQUAZIONI di CONSERVAZIONE
4.1 Classificazione delle Macchine
Chiamasi “macchina” la sede di una trasformazione energetica operante mediante uno o più fluidi
in azione dinamica o cinematica; detti fluidi sono i vettori energetici della trasformazione.
Tale definizione generale ricomprende le macchine a flusso continuo, dette turbomacchine, (quali
pompe, compressori, turbine), le macchine a fluido periodico, dette volumetriche (quali pompe,
compressori, espansori volumetrici) e gli scambiatori di calore (quali generatori di vapore,
condensatori, ecc.).
Pertanto per macchina si intende un sistema che converte energia primaria in una forma più
comodamente utilizzabile (energia meccanica). In una macchina a fluido in particolare tale
conversione viene realizzata utilizzando un fluido, ad esempio aria, acqua o vapore. Tale fluido
subisce una trasformazione all’interno della macchina, con un conseguente trasferimento di energia
tra gli organi mobili della macchina (rotore) ed il fluido stesso.
Il fluido a contatto con gli organi di una macchina scambia con questi delle forze. Si sottolinea
come tali forze compiono lavoro solo se gli organi sono in movimento.
Le macchine possono essere classificate in base al senso del trasferimento di energia; in particolare
si parla di macchina operatrice quando il lavoro viene compiuto dalla macchina sul fluido con un
conseguente assorbimento di potenza. Si parla di macchina motrice quando il lavoro viene
compiuto dal fluido sulla macchina, con una erogazione di potenza all’albero della macchina.
Esempi di macchine motrici sono le turbine idrauliche, le turbine a gas o a vapore, i motori a
combustione interna, Diesel e a Ciclo Otto. Esempi di macchine operatrici sono i compressori, i
ventilatori e le pompe.
Un’altra classificazione si basa sulla natura del fluido evolvente. Si chiamano macchine idrauliche
quelle che lavorano con fluidi incomprimibili; prendono invece il nome di macchine termiche
quelle che usano fluidi comprimibili. Per un fluido incomprimibile la sua storia meccanica è
separata da quella termica, che è peraltro ininfluente. Per un fluido comprimibile invece le due cose
sono intimamente legate. Se si esercita una pressione su un fluido comprimibile, cambia la sua
densità e si scalda; con un fluido incomprimibile ciò non accade. Si ha quindi energia termica che si
converte in energia meccanica, e ciò si verifica solo in macchine a fluido comprimibile.
Un’altra classificazione riguarda gli organi che scambiano energia, cioè quelli che interagiscono
con il fluido: macchina rotativa o alternativa a seconda che l’organo mobile segua un moto
rotatorio (ad es. turbine, compressori, pompe) o alternato (motori a combustione interna). Esempi di
pompe rotative sono quella ad ingranaggi, il compressore a lobi tipo Roots e quello ad alette.
Si distingue poi tra macchine dinamiche e volumetriche a seconda dell’andamento del flusso. Nelle
macchine dinamiche, il flusso attraverso la macchina è continuo; tali macchine, come già anticipato
sono dette turbomacchine.
Nelle macchine volumetriche il flusso è invece periodico: la macchina preleva ciclicamente una
certa quantità di fluido, le fa compiere la trasformazione, e quindi la scarica. Esempi di macchine
Pagina 1 di 37
volumetriche sono i compressori rotativi tipo Roots e i compressori ad alette. Le macchine
alternative possono essere solo volumetriche, mentre quelle rotative possono essere sia
volumetriche sia dinamiche.
Un’ulteriore classificazione riguarda unicamente le macchine dinamiche (turbomacchine): a
seconda della direzione del flusso all’interno della macchina si distingue tra macchine assiali, in cui
il fluido procede prevalentemente in direzione parallela all’asse di rotazione della macchina, e
macchine radiali, dove il fluido procede invece prevalentemente in direzione perpendicolare
all’asse di rotazione della macchina. Esempi di macchine assiali sono il ventilatore assiale, il
compressore assiale e le turbine a vapore. La pompa centrifuga è invece un esempio di macchina
radiale.
La Tabella 1 riassume tutte le classificazioni dette, mentre la Tabella 2 e la Tabella 3 riportano i
principali tipi rispettivamente di macchine operatrici e di quelle motrici. Di queste ultime, nella
realtà solo quelle riportate in rosso e sottolineate ed trovano applicazione.
Scambio di energia
Tipo di fluido
Moto degli organi che scambiano lavoro
Regime di flusso
Direzione del flusso
motrici
operatrici
idrauliche
termiche
alternative
rotative
volumetriche
dinamiche
assiali
radiali
Tabella 1: classificazione delle Macchine a Fluido
Fluido
motore
Movimento organo
motore
Alternativo
Liquido
Rotativo
Alternativo
Gas
Rotativo
Tipi di funzionamento
Macchine
Macchine
dinamiche
volumetriche
(turbomacchine)
Pompe alternative
Pompe a ingranaggi, a
Pompe
palette, a eccentrici ecc. (assiali, miste, radiali)
Compressori a
stantuffo e a membrana
Compressori Roost, a
Compressori
palette, a eccentrico
(assiali, misti, radiali)
Tabella 2: classificazione delle Macchine Operatrici
Fluido
Movimento organo
Pagina 2 di 37
Tipi di funzionamento
motore
motore
Alternativo
Liquido
Rotativo
Alternativo
Vapore
Macchine
volumetriche
Macchine idrauliche a
revolver, stellari ecc.
Macchine idrauliche a
ingranaggi, a palette, a
eccentrici ecc.
Macchine alternative a
vapore
Turbine idrauliche
(Pelton, Francis,
Kaplan e eliche)
-
Turbine a vapore
(assiali, radiali)
Rotativo
Alternativo
Gas
Rotativo
Macchine
dinamiche
(turbomacchine)
Motori alternativi a
combustione interna,
a combustione esterna,
ad accensione
comandata, Diesel
Motori rotativi a
combustione interna
ecc.
-
-
-
Turbine a gas
(assiali, radiali)
Tabella 3: classificazione delle Macchine Motrici
Le macchine operano quindi con fluidi che subiscono, durante il loro moto tra le pareti delle
macchine, trasformazioni termodinamiche; indipendentemente dal tipo di macchina e di fluido
considerato, tali processi energetici sono governati dalla leggi della fisica.
Elementi fondamentali nella trattazione teorica delle macchine sono quindi:
1. la conoscenza delle proprietà termodinamiche e fisiche dei fluidi;
2. la conoscenza delle equazioni della termo e fluidodinamica.
Nei prossimi paragrafi e capitoli saranno trattati questi argomenti.
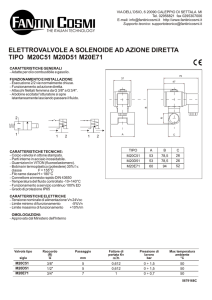
Figura 1: sezione dei rotori di un motore-pompa idraulico rotativo, con vista esplosa.
Pagina 3 di 37
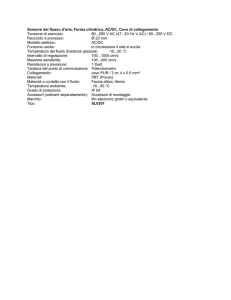
Figura 2: sezione trasversale di a) un compressore tipo Roots; b) un compressore rotativo a palette.
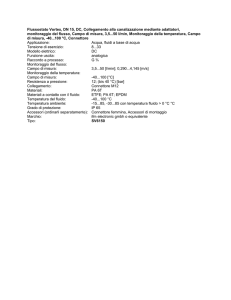
Figura 3: sezione longitudinale di una pompa centrifuga (1. cassa, 4. girante, 14, albero).
Pagina 4 di 37
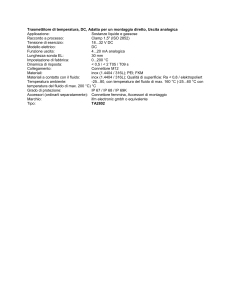
Figura 4: ruota Pelton dell’impianto di S. Massenza e sezione trasversale dell’impianto idroelettrico (Franco
Tosi) - caduta 590 m; portata 14.8 m3/s; potenza 75 MW, velocità di rotazione 428 giri/min).
Figura 5: sezione trasversale di una turbina Francis dell’impianto di Ilha Solteira (Brasile) (Consorzio Voith,
Neyrpic, Sfac, Escherwiss, Riva, Ansaldo, Tosi) - caduta 48 m; portata 450 m3/s; potenza 194 MW, velocità di
rotazione 85.7 giri/min.
Pagina 5 di 37
Figura 6: sezione trasversale di una turbina Kaplan dell’impianto di Jupià.
Pagina 6 di 37
Figura 7: ventilatore assiale.
Figura 8: compressore assiale.
Pagina 7 di 37
Figura 9: turbina a vapore a unico corpo.
Figura 10: turbina a vapore a doppio corpo con cross over.
Pagina 8 di 37
Figura 11: rotore di una turbina a vapore
Figura 12: turbogas bialbero aeroderivativo GE LM 1600.
Pagina 9 di 37
4.2. Sistema aperto
Si definisce sistema aperto un sistema il cui contorno può essere attraversato da:
- materia;
- calore;
- lavoro.
Per quanto concerne le tematiche oggetto del presente capitolo un sistema aperto può essere visto
come una scatola nera attraversata da un fluido di lavoro (Figura 13).
1
Q
v1
2
v2
L
Figura 13: sistema aperto.
Tutte le considerazioni sviluppate nel presente capitolo si baseranno sulle ipotesi semplificative
di:
- modello monodimensionale del sistema;
- moto stazionario del fluido di lavoro.
L’ipotesi di moto stazionario del fluido di lavoro implica:
- composizione chimica costante in un dato punto;
- proprietà termodinamiche costanti in un dato punto;
- velocità costante in un dato punto.
Pagina 10 di 37
4.3. Principio di conservazione della massa
Si consideri il sistema in Figura 13, per il principio di conservazione della massa le portate
massiche (kg/s) all’ingresso (1) e all’uscita del sistema (2), in assenza di accumulo, sono uguali tra
loro.
m1 = m2
Quindi per un fluido, sia esso comprimibile che incomprimibile, si avrà che
m1 = ρ1 A1v1
m2 = ρ 2 A2 v2 ⇒ ρ1 A1v1 = ρ 2 A2 v2
m = m
2
1
ρ1 A1v1 = ρ 2 A2 v2
(fluidi comprimibili e incomprimibili)
Dove:
- ρi è la densità del fluido al punto i-esimo;
- A1 è l’area di passaggio del fluido al punto i-esimo;
- vi è il vettore velocità del fluido in ingresso alla sezione di passaggio Ai e normale ad essa
(ricordiamo che siamo nell’ipotesi di modello monodimensionale). Indichiamo per
semplicità con vi il modulo del vettore velocità;
Fluido incomprimibile
Dato un fluido incomprimibile che attraversa il volume di controllo si ha che:
ρ1 = ρ2
quindi
ρ1 A1v1 = ρ 2 A2 v2
⇒ A1v1 = A2 v2
ρ1 = ρ 2
A1v1 = A2v2
(fluidi incomprimibili)
Dove il prodotto dell’area di passaggio per il vettore velocità in direzione normale all’area stessa
non è altro che la portata volumetrica (V) del fluido.
m2 * m/s = m3/s
Per un fluido incomprimibile si ha la conservazione della portata volumica (m3/sec).
Pagina 11 di 37
4.4. Principio di conservazione dell’energia
Si ricorda che tutte le trattazioni fatte in questo corso si basano sull’ipotesi di sistemi semplificati,
cioè sistemi termodinamici:
a) macroscopicamente in quiete, non sottoposti a campi gravitazionali ed esenti da effetti di
superficie;
b) elettricamente e magneticamente neutri;
c) chimicamente inerti.
4.4.1. Primo principio della termodinamica per sistemi chiusi
Dato un sistema chiuso, quindi un sistema che non può scambiare massa con l’esterno, per il I
P.T.D. avremo che:
qe + le = ∆e = ∆u
dove:
-
qe è il calore massico scambiato con l’esterno;
le è il lavoro massico scambiato con l’esterno;
∆e è la variazione di energia del sistema per unità di massa;
∆u è la variazione di energia interna del sistema per unità di massa.
4.4.2. Primo principio della termodinamica per sistemi aperti
Dato un sistema aperto, in grado quindi di scambiare massa con l’esterno, per il I P.T.D. avremo
che
qe + l = ∆e
a sua volta la variazione di energia del sistema è pari a
∆e = ∆u + ∆ec + ∆ep
Mettendo a sistema si ha
qe + l = ∆u + ∆ec + ∆ep
dove
-
l è il lavoro scambiato per unità di massa;
∆ec è la variazione di energia cinetica del sistema per unità di massa;
∆ep è la variazione di energia potenziale del sistema per unità di massa.
Il lavoro scambiato per unità di massa (l) è la somma del lavoro utile specifico massico (le) e del
lavoro di pulsione specifico massico (lpulsione).
l = le + lpulsione
Il lavoro utile specifico massico (le) è il lavoro scambiato per unità di massa tra il fluido che
attraversa il sistema aperto e gli organi mobili che costituiscono la macchina (Figura 13 – pagina
10).
Pagina 12 di 37
Il lavoro di pulsione specifico massico (lpulsione) o anche detto lavoro di spostamento specifico
massico è pari all’energia necessaria a muovere il fluido attraverso le sezioni (1) e (2) di ingresso e
di uscita dal volume di controllo (Figura 13 – pagina 10).
lpulsione = p1v1 – p2v2
Dove
- pi è la pressione del fluido in corrispondenza della sezione di passaggio i-esima;
- vi è il volume specifico massico del fluido in corrispondenza della sezione di passaggio iesima.
Dall’analisi dimensionale si vede come il prodotto tra la pressione e il volume specifico massico dia
luogo ad una grandezza che ha l’unità di misura di un lavoro specifico massico.
U.d.m. (p) = Pa = N/m2
U.d.m (v) = m3/kg
Quindi
(P)(v) = N/m2 * m3/kg = N * m/kg = J/kg
Dove J/kg non è altro che l’unità di misura del lavoro specifico massico.
Pertanto dato un sistema aperto per il I P.T.D. abbiamo
q e + l = ∆u + ∆ec + ∆e p
⇒ q e + l e + l pulsione = ∆u + ∆ec + ∆e p
l = l e + l pulsione
Esplicitando tutti i termini
lpulsione = p1v1 – p2v2
∆ec = ½(v22-v12)
qe + le = (u2 – u1) + ½(v22-v12) + g (z2 – z1) + (p2v2 – p1v1)
∆ep = g (z2 – z1)
Considerando che la densità (ρ) non è altro che il reciproco del volume specifico (v) si ha che il I
P.T.D. per sistemi aperti assume la seguente espressione
qe + le = (u2 – u1) + ½(v22-v12) + g (z2 – z1) + (p2/ρ2 - p1/ρ1)
che espressa in funzione dell’entalpia (h)
h = u + pv
diventa
qe + le = (h2 – h1) + ½(v22-v12) + g (z2 – z1)
Pagina 13 di 37
tale equazione è valida sia per processi reversibili che reali (cioè irreversibili), sarà direttamente
l’entalpia all’uscita del sistema a tenere implicitamente conto della presenza o meno di
irreversibilità.
4.4.3. Lavoro perso
Dato un sistema chiuso abbiamo visto che il I P.T.D. assume la seguente forma
δq + δl = du
E a sua volta il lavoro scambiato specifico massico è pari a
δl = pdv
ponendo a sistema si ottiene
δq = du + pdv
dalla definizione di entalpia, differenziano si ottiene
h = u + pv
dh = du + pdv + vdp
ponendo a sistema
δq = du + pdv
⇒ δq = dh − pdv − vdp + pdv
dh = du + pdv + vdp
Semplificando i termini si ottiene
δq = dh - vdp
Per un processo reversibile si ha
ds =
δq
T
⇒ δq = Tds
Ponendo a sistema avremo
δq = dh − vdp
⇒ Tds = dh − vdp
δq = Tds
Quindi per un processo reversibile
dh = Tds + vdp
Questa espressione sebbene ricavata per un processo reversibile è valida anche per processi
irreversibili essendo l’entalpia una grandezza di stato e quindi la variazione di entalpia è
indipendente dal tipo di trasformazione (reversibile o meno) ma dipende solo dallo stato iniziale e
finale del sistema.
Pagina 14 di 37
Per un processo irreversibile la variazione di entropia del sistema è maggiore del rapporto tra il
calore scambiato con l’esterno e la temperatura del sistema
dstot >
δq e
T
Si ha invece che
dstot =
δqe
T
+
δqirr
T
Quindi
Tdstot = δqe + δqirr
Come precedentemente detto l’equazione
dh = Tds + vdp
valida per processi reversibili lo è anche per processi irreversibili quindi
dh = Tdstot + vdp
Ponendo a sistema si ha
dh = Tdstot + vdp
⇒ dh = δq e + δq irr + vdp
Tdstot = δq e + δqirr
Il calore generato da processi irreversibili non è altro che il lavoro perso per le irreversibilità
dovute agli attriti, quindi
δqirr = δlirr
sostituendo si ha
dh = δqe + δlirr + vdp
integrando
2
∫
h2 − h1 = q e + l irr + vdp
1
Ponendo a sistema con l’eq. di conservazione dell’energia per sistemi aperti
Pagina 15 di 37
(
)
1 2
(
)
q
l
h
h
v 2 − v12 + g ( z 2 − z1 )
+
=
−
+
e
e
2
1
2
2
1
⇒ q e + l e = q e + l irr + vdp + v 22 − v12 + g ( z 2 − z1 ) ⇒
2
2
h2 − h1 = q e + l irr + vdp
1
1
∫
∫
2
∫
l e − l irr = vdp +
1
(
(
)
)
1 2
v 2 − v12 + g ( z 2 − z1 )
2
Per un processo reversibili (lirr = 0)
2
∫
l e = vdp +
1
(
)
1 2
v 2 − v12 + g ( z 2 − z1 )
2
Per un sistema in quiete
2
∫
l e − l irr = vdp
1
Dove
2
∫ vdp
1
è il lavoro utile, cioè il lavoro realmente scambiato tra la macchina e il fluido.
Ciò significa che data una macchina:
- operatrice (ad esempio una pompa o un compressore), detto le il lavoro meccanico all’albero
della macchina, quindi l’energia meccanica spesa per comprimere il fluido, una parte di
questo lavoro si perde per attriti e viene convertito in calore (lirr) mentre la restante parte (le
– lirr) pari all’integrale di vdp è il lavoro realmente ricevuto dal fluido e che ne che ne
determina l’innalzamento di pressione;
- motrice (ad esempio una turbina), detto le il lavoro ceduto dal fluido, una parte di questo
lavoro si perde per attriti e viene convertito in calore (lirr) mentre la restante parte (le – lirr)
pari all’integrale di vdp è il lavoro realmente disponibile all’albero della turbina.
Nel caso di processi reversibile il lavoro scambiato con l’esterno ed il lavoro utile coincidono.
2
∫
l e = vdp
1
Esercizio: data una turbina a vapore che elabora una portata (m) di vapor d’acqua di 2 kg/s
scambiando con l’esterno una potenza termica (Q) di 11 kW, calcolare la potenza meccanica (P)
all’albero della turbina.
Pagina 16 di 37
p (MPa) T (°C) Titolo di vapore (x) v (m/s) z (m)
Ingresso
3
400
60
5
Uscita
0,125 105,99
1
180
2
Tabella 4: condizioni del vapore all’ingresso e all’uscita della turbina.
1
P
Q
2
P = m*l
Note: per il calcolo delle entalpie utilizzare le tabelle del vapore surriscaldato e del vapor saturo.
Riultato:
- P = 1.057 kW.
4.4.4. Fluidi incomprimibili e teorema di Bernulli
Abbiamo visto come l’equazione di conservazione dell’energia
qe + le = (h2 – h1) + ½(v22-v12) + g (z2 – z1)
sia valida sia per processi reversibili che irreversibili o anche detti reali.
Si è anche visto come il lavoro effettivamente scambiato tra fluido e macchina, ceduto o assorbito,
sia pari alla differenza tra il lavoro utile e il lavoro convertito in calore per irreversibilità.
2
∫
l e − l irr = vdp +
1
(
)
1 2
v 2 − v12 + g ( z 2 − z1 )
2
Per poter però calcolare il lavoro con queste espressione è necessario risolvere l’integrale in essa
contenuto, è quindi necessario conoscere il tipo di trasformazione. Almeno di non essere nel caso di
un fluido incomprimibile.
Per un fluido incomprimibile
ρ = cost
v = cost
quindi integrando sia
Pagina 17 di 37
l e − l irr =
( p − p1 )
1 2
v 2 − v12 + g ( z 2 − z1 ) + 2
2
ρ
(
)
Consideriamo ora un sistema:
- ideale (lirr = 0)
- costituito da un condotto attraversato da un fluido incomprimibile (ρ = cost);
- in assenza di organi mobili che permettano lo scambio di lavoro tra il fluido e l’esterno (le =
0);
l’equazione
l e − l irr =
( p − p1 )
1 2
v 2 − v12 + g ( z 2 − z1 ) + 2
2
ρ
(
)
assumerà la forma
p1
ρ1
+
v12
p
v2
+ gz1 = 2 + 2 + gz 2
2
ρ2
2
meglio nota come teorema di Bernulli.
Pagina 18 di 37
4.5. Moto sub sonico e super sonico
Si definisce Numero di Mach il rapporto tra la velocità del fluido e la velocità del suono
M=
v
a
Dove:
- v è la velocità del fluido;
- a è la velocità del suono.
Si definisce moto subsonico il moto di un fluido avente
M<1→v<a
Il fluido si muove a velocità inferiore a quella del suono.
Si definisce moto supersonico il moto di un fluido avente
M>1→v>a
Il fluido si muove a velocità superiore a quella del suono.
Il quadrato della velocità del suono rappresenta la variazione di pressione in un fluido al variare
della sua densità a entropia costante. La velocità del suono varia in funzione del fluido e delle
condizioni del fluido.
a2 =
dp
dρ S
Per un gas perfetto la velocità del suono è pari a:
a = γRT
Dove R è la costante universale dei gas.
Nel caso di un fluido a densità costante:
ρ = cos t ⇒ dρ = 0 ⇒ a = ∞
La velocità del suono è infinita, di conseguenza il moto è sempre subsonico.
Si consideri un fluido che attraversa un condotto:
- adiabatico, quindi no scambio di calore con l’esterno;
- senza scambiare lavoro con l’esterno, quindi lavoro utile pari a zero;
- in regime stazionario.
Per l’equazione di conservazione della massa avremo
Pagina 19 di 37
ρAv = cos t
Con
-
ρ, densità del fluido;
A, sezione di passaggio;
v, velocità del fluido nel condotto.
Calcolando il differenziale dell’equazione di conservazione della massa si ottiene
ρAv = cos t ⇒ d (ρAv ) = 0 ⇒ ρvdA + Avdρ + ρAdv = 0
Dividendo per ρAv si ottiene
ρvdA + Avdρ + ρAdv
dA dρ dv
=0⇒
+
+
=0
ρAv
A
ρ
v
Quindi
dA dρ dv
+
+
=0
A
ρ
v
Per l’equazione di conservazione dell’energia per un sistema adiabatico e che non scambia lavoro,
considerando trascurabile la variazione di quota del fluido nel condotto, si ha:
h+
v2
= cos t
2
Differenziando si ottiene
v2
1
d h + = 0 ⇒ dh + 2v dv = 0 ⇒ dh + vdv = 0
2
2
Quindi
dh = −vdv
Si è visto in precedenza che per un processo come per un processo irreversibile vale la seguente
equazione
dh = Tds + vdp
da cui, data una trasformazione reversibile (ds = 0) si ha che
dh = vdp
Pagina 20 di 37
ponendo a sistema le due equazioni
dh = vdp
dh=-vdv
si ha
vdp = -vdv →
dp
ρ
= −vdv →
dp
v2ρ
=−
dv
v
Ponendo a sistema quanto ricavato dall’equazione di conservazione della massa
dA dρ dv
+
+
=0
ρ
A
v
con quanto ottenuto dall’equazione di conservazione dell’energia
dp
v ρ
2
=−
dv
v
si ottiene
dA dρ dv
A + ρ + v =0
dp
dA dρ
⇒
+
−
=0
ρ v2ρ
A
dp = − dv
v 2 ρ
v
Pertanto
dA dp dρ 1 dp
dp 1 dρ
= 2 −
= 2 − dρ =
−
ρ ρ v
A v ρ
ρ v 2 dp
Quindi
dA dp 1 dρ
=
−
ρ v 2 dp
A
Dalla definizione di velocità del suono, tenuto conto che siamo nell’ipotesi di processo reversibile
(dS = 0)
a2 =
dp
dρ S
Sostituendo
Pagina 21 di 37
dA dp 1 dρ
=
−
ρ v 2 dp dA dp 1
1 dp a 2 − v 2 dp v 2
A
⇒
=
−
=
=
1 −
ρ v 2 a 2 ρ v 2 a 2 v 2 ρ a 2
A
a 2 = dp
dρ S
Quindi
dA dp v 2
=
1 −
A v 2 ρ a 2
A sua volta si è definito il Numero di Mach come
v
a
M=
Sostituendo si ha
[
dA dp
= 2 1− M 2
A v ρ
]
Dai passaggi precedenti si è visto essere
dp
v ρ
2
=−
dv
v
quindi
[
]
[
]
dA dp
dv
= 2 1− M 2 = −
1− M 2 =
A v ρ
v
4.5.1. Moto subsonico di un fluido in un condotto
In presenza di moto subsonico avremo
[
]
M <1⇒ 1− M 2 > 0
Pertanto
dA dp
α
A v2ρ
dA
dv
α−
A
v
Dato un condotto convergente
dp
dA
< 0 ⇒ 2 < 0 ⇒ dp < 0
A
v ρ
Pagina 22 di 37
dA
dv
<0⇒−
< 0 ⇒ dv > 0
A
v
In modo del tutto analogo, dato un condotto divergente
dp
dA
> 0 ⇒ 2 > 0 ⇒ dp > 0
A
v ρ
dA
dv
>0⇒−
> 0 ⇒ dv < 0
A
v
Pertanto in presenza di un flusso subsonico che attraversa un condotto adiabatico e in assenza di
scambio di lavoro con l’esterno:
- riducendo la sezione di passaggio si ha conversione di energia di pressione in energia
cinetica, la pressione scende e la velocità sale;
- aumentando la sezione di passaggio si ha conversione di energia cinetica in energia di
pressione, il fluido rallenta e la pressione sale.
M<1
A↓ v↑ p↓
A↑ v↓ p↑
4.5.2. Moto supersonico di un fluido in un condotto
In presenza di moto subsonico avremo
[
]
M >1⇒ 1− M 2 < 0
Pertanto
dp
dA
α− 2
A
v ρ
dA dv
α
A
v
Dato un condotto convergente
dp
dA
< 0 ⇒ − 2 < 0 ⇒ dp > 0
A
v ρ
dA
dv
<0⇒
< 0 ⇒ dv < 0
A
v
In modo del tutto analogo, dato un condotto divergente
Pagina 23 di 37
dp
dA
> 0 ⇒ − 2 > 0 ⇒ dp < 0
A
v ρ
dA
dv
>0⇒
> 0 ⇒ dv > 0
A
v
Pertanto in presenza di un flusso supersonico che attraversa un condotto adiabatico e in assenza di
scambio di lavoro con l’esterno:
- riducendo la sezione di passaggio si ha conversione di energia cinetica in energia di
pressione, il fluido rallenta e la pressione sale;
- aumentando la sezione di passaggio si ha conversione di energia di pressione in energia
cinetica, la pressione scende e la velocità sale.
M>1
A↓ v↓ p↑
A↑ v↑ p↓
4.6. Entalpia totale, temperatura totale e pressione totale
Si consideri un condotto attraversato da un fluido, nelle ipotesi di:
- condotto adiabatico (qe = 0);
- assenza di organi mobili (le = 0).
1
MISURA DELLA
PRESSIONE TOTALE
2
MISURA DELLA
PRESSIONE STATICA
Figura 14:condotto adiabatico in assenza di organi
mobili.
Sino a qui si sono considerate sempre e solo le proprietà statiche del fluido, quali la temperatura
statica e la pressione statica, cioè le proprietà del fluido misurate da strumenti che non risentono
della velocità della corrente.
Nel condotto rappresentato in Figura 14 sono presenti due misuratori di pressione, uno normale alla
direzione del flusso, e che quindi non vede la velocità del flusso, che legge la pressione statica e
l’altro avente l’ingresso rivolto contro la corrente, la cui misura di pressione sarà quindi influenzata
dalla velocità del flusso.
Si definiscono condizioni totali del fluido (entalpia totale, pressione totale, temperatura totale, ecc.)
le condizioni del fluido a seguito di un arresto senza attriti, cioè reversibile, e adiabatico e quindi
isoentropico. La pressione risultante dall’arresto del flusso è detta pressione totale, che è la
pressione letta dal sensore posto sulla traiettoria del fluido in Figura 14.
Pagina 24 di 37
Applicando, ai capi del condotto, l’equazione di conservazione dell’energia per fluidi comprimibili
si ha:
qe + le = (h2 – h1) + ½(v22-v12) + g (z2 – z1)
nelle ipotesi di
- flusso adiabatico (qe = 0);
- assenza di organi mobili (le = 0);
- variazione di quota trascurabile (z = cost);
si ha
h1 + ½v12 = h2 + ½v22
si definisce entalpia totale (ht)
ht = h + ½v2
h
pt
ht
v2/2
p
h
s
Si consideri ora l’ipotesi che il fluido in moto nel condotto sia un gas perfetto, ne consegue che
dh = cp dT
-----------------------------------------------------------------------------------------------------------------------Dimostrazione
Dal primo principio della termodinamica
δq – δl = dep + dec + du
nelle ipotesi di flusso a velocità costante, quindi variazione di energia cinetica nulla (dEc = 0), e in
assenza di variazioni significative di quota, quindi variazione di energia potenziale gravitazionale
nulla (dep = 0), si ha:
δq – δl = du
Pagina 25 di 37
dove
δl = pdv
quindi
δq = du + pdv
Dalla definizione di entalpia si ha
h = u + vp dh = du + pdv + vdp
ponendo a sistema si ottiene
δq = du + pdv
⇒ δq = dh + pdv − pdv − vdp
du = dh - pdv - vdp
semplificando si ha
δq = dh - vdp
Dalla definizione di calore specifico si ha
δq
cp =
dT p
Quindi sostituendo si ottiene
dh − vdp
cp =
dT p
Ma essendo per definizione cp il calore specifico per una trasformazione a pressione costante allora
P = cost dp = 0
Ne consegue che
dh
cp =
⇒ dh = c p dT
dT p
----------------------------------------------------------------------------------------------------------------------Procediamo ora alla definizione di temperatura totale (Tt)
ht = h + ½v2 ht – h = ½v2
dh = cp dT ht – h = cp (Tt – T)
quindi ponendo a sistema si ha
Pagina 26 di 37
cp (Tt – T) = ½v2
da cui
v2
Tt = T +
2c p
T
pt
Tt
v2/2cp
p
T
h
s
Infine definiamo la pressione totale (pt)
Per una trasformazione adiabatica sappiano essere (vedasi appendice al capitolo)
T2
T1
p2
=
p1
Tt
T
pt
=
p
γ −1
γ
Ne consegue che
γ −1
γ
4.6.1. Temperatura e pressione totale in funzione del Numero di Mach
La temperatura totale (Tt) e la pressione totale (pt) possono essere espressi in funzione del Numero
di Mach.
Tt
(γ − 1) M 2
= 1+
T
2
γ
pt (γ − 1) 2 γ −1
= 1+
M
p
2
Dimostrazione
Al paragrafo 4.5 si è introdotto il Numero di Mach, rapporto tra la velocità del fluido e la velocità
del suono
Pagina 27 di 37
M =
v
⇒ v = Ma
a
Dove:
- v è la velocità del fluido;
- a è la velocità del suono.
La velocità del suono varia in funzione del fluido e delle condizioni del fluido e per un gas perfetto
la velocità del suono è pari a:
a = γRT
Dove R è la costante universale dei gas.
Ponendo a sistema si ha
v = Ma
⇒ v = M γRT ⇒
a = γRT
⇒ v 2 = M 2 γRT
Dalla definizione di temperature totale si ha
Tt = T +
v2
2c p
Ponendo il tutto a sistema
v2
T
=
T
+
M 2 γRT
t
2c
⇒
p ⇒ Tt = T +
2c p
2
2
v = M γRT
M 2 γRT
cp
T
=
T
+
M 2 RT
M2
RT
t
2
c
T
=
T
+
cv
t
p
2c v ⇒
⇒
⇒ Tt = T +
⇒
2c p
γ = c p
R = c − c
p
v
cv
(c p − cv )
2
Tt = T + M T
2c v
(γ − 1) ⇒
⇒
⇒ Tt = T + M 2T
2
γ = c p
cv
Pagina 28 di 37
(γ − 1) 2
⇒ Tt = T 1 +
M ⇒
2
⇒
Tt
(γ − 1) M 2
= 1+
T
2
Q.E.D.
A partire dall’equazione appena dimostrata si ricava anche la pressione totale in funzione del
Numero di Mach.
(γ − 1) 2
Tt
γ −1
T = 1+ 2 M
pt γ
(γ − 1) M 2 ⇒
γ −1
⇒ = 1 +
2
p
Tt p t γ
=
T p
γ
p
(γ − 1) 2 γ −1
⇒ t = 1 +
M
p
2
Q.E.D.
4.6.2. Temperatura e pressione totale per un fluido incomprimibile
Per un fluido incomprimibile si ha
M0
Quindi la temperatura totale (Tt) e la temperatura statica (T) coincidono.
(γ − 1) M 2
Tt
= 1+
⇒ Tt ≡ T
2
T
M → 0
Si è visto come per un fluido incomprimibile valga la seguente equazione di conservazione
dell’energia
le − lirr =
( p − p1 )
1 2
v2 − v12 + g (z 2 − z1 ) + 2
2
ρ
(
)
Nel caso di arresto (v2 = 0) senza attriti, cioè reversibile, e adiabatico e quindi isoentropico (lirr =
0) in un condotto senza parti mobili (le = 0) si ha
( p − p1 ) = 0
1
− v12 + g ( z 2 − z1 ) + 2
ρ
2
Pagina 29 di 37
Se poi consideriamo in condotto piano o comunque il salto geodetico trascurabile (z2 = z1) avremo
che tra le condizioni iniziali (p,T,v) e quelle successive all’arresto (pt,Tt,vt) varrà la relazione:
( p − p)
1
− v2 + t
=0
2
ρ
Quindi
pt = p +
1 2
ρv
2
Pagina 30 di 37
4.7. Appendice
4.7.1. Variazione di entropia per un gas perfetto
Dal Primo Principio della Termodinamica per un sistema chiuso
du = δq - δl
dove
δq = Tds
δl = pdv
sostituendo si ha
du = δq − δl
du
p
⇒ du = Tds − pdv ⇒
= ds − dv
δq = Tds
T
T
δl = pdv
Si rammenta che per un gas perfetto:
- l’energia interna è funzione solo della temperatura;
- il calore specifico è costante (cx = cost);
- vale la legge dei gas perfetti.
du = cvdT
pv = RT ⇒
p R
=
T v
con
-
R = costante del gas = R*/PM,
R* = costante universale dei gas perfetti = 8.314 J/(kmolK)
PM = massa molare
Ponendo il tutto a sistema
p
du
T = ds − T dv
dT
R
⇒ cv
= ds − dv ⇒
du = c v dT
T
v
p R
=
T v
⇒ ds = cv
dT
dv
+R
T
v
Posto che per un gas perfetto cv è costante, integrando si ottiene:
Pagina 31 di 37
T
v
∆s = cv ln 2 + R ln 2
T1
v1
Quindi
s = f(T;v)
Analogamente si può ricavare l’entropia in funzione di T e p.
δq = dh – vdp
con
δq = Tds
sostituendo si ha
Tds = dh − vdp ⇒ ds =
dh v
− dp
T T
Per un gas perfetto si ha che
dh = cpdT
pv = RT ⇒
v R
=
T p
con
-
R = costante del gas = R*/PM,
R* = costante universale dei gas perfetti = 8.314 J/(kmolK)
PM = massa molare
Ponendo il tutto a sistema
dh v
− dp
ds =
T T
dT
dp
⇒ ds = c p
−R
dh = c p dT
T
p
v
R
=
T p
Posto che per un gas perfetto cp è costante, integrando si ottiene:
T
p
∆s = c p ln 2 − R ln 2
T1
p1
Quindi
s = f(T;p)
Pagina 32 di 37
4.7.2. Trasformazione adiabatica per un gas perfetto
Per un gas perfetto oggetto di una trasformazione adiabatica (δq = 0) si ha
pvγ = cost
p1v1γ = p2v2γ
e vale anche la relazione
T2
T1
p2
=
p1
γ −1
γ
T
T2
2
T1
1
s
s2 ≡ s1
Figura 15: trasformazione adiabatica e quasi statica (irreversibile).
Dimostrazione
Si è visto come per un gas perfetto valga la relazione
T
v
∆s = cv ln 2 + R ln 2
T1
v1
Nel caso di trasformazione adiabatica si avrà
∆q = 0 ∆s = 0
Quindi
T
0 = cv ln 2
T1
v
T
v
+ R ln 2 ⇒ cv ln 2 = − R ln 2
v1
T1
v1
T
⇒ ln 2
T1
R v
= − ln 2
cv v1
Per la relazione di Mayer si ha
R = cp - cv
Pagina 33 di 37
⇒
sostituendo
T
ln 2
T1
c − cv
= − p
cv
v2
ln
v1
T
⇒ ln 2
T1
v
c
= − p − 1 ln 2
cv
v1
Ponendo a sistema con la definizione di γ:
T2
cp
v2
ln = − − 1 ln
T1
cv
v1
cp
γ = c
v
T
⇒ 2
T1
v2
=
v1
− (γ −1)
T
v
⇒ ln 2 = −(γ − 1) ln 2
T1
v1
T
⇒ ln 2
T1
v
= ln 2
v1
p2 v 2
T v (γ −1)
2
1
=
R v1
⇒ T1 v 2
⇒
=
v
p
v
1
1
2
pv = RT
R
v v
p
⇒ 2 = 1 1
p1 v 2 v 2
v
p
⇒ 2 = 1
p1 v 2
(γ −1)
γ
⇒
⇒ p1 v1γ = p 2 v γ2
Quindi
pvγ = cost
Q.E.D.
Pagina 34 di 37
⇒
(γ −1)
⇒
− (γ −1)
⇒
Dimostriamo ora che
T2
T1
p2
=
p1
γ −1
γ
Nei passaggi della dimostrazione precedente si è visto che
T2 v 2
=
T1 v1
− (γ −1)
Da cui si ha
T2
T1
v1
=
v2
(γ −1)
v
= 1
v2
γ
v1
v2
−1
Ponendo a sistema con
1
γ
v
p γ
v
v
p
p1 v1γ = p 2 v γ2 ⇒ 1 = 2 ⇒ 1 = 2 ⇒ 1
v 2 p1
p1
v2
v2
−1
p
= 2
p1
si ha
γ −1
T2 = v1 v1
T1 v 2 v 2
1
1
γ
−
1−
v1
T2 p 2 p 2 γ p 2 γ
p2
= ⇒
⇒ =
=
v
p
T
p
2
1
1
1
p1
p1
1
−1
−
γ
v1
p2
=
p1
v 2
T
⇒ 2
T1
p2
=
p1
γ −1
γ
Q.E.D.
Pagina 35 di 37
−
1
γ
4.7.2.1. Lavoro specifico massico per una trasformazione adiabatica di
un gas perfetto
Per un sistema chiuso
δl = pdv
ma
pv γ = cost ⇒ p =
cost
vγ
Ponendo a sistema si ha
2
δl = pdv
2
1 (−γ +1)
dv
dv
v
cos t ⇒ δl = cost γ ⇒ l12 = cost ∫ γ ⇒ l12 = cost
⇒
v
- γ + 1
1
1 v
p = v γ
⇒ l12 =
[
]
cost −γ 2
v v1
- γ +1
A sua volta
pv γ = cost ⇒
p
p
= cost ⇒ v −γ =
−γ
cost
v
Ponendo a sistema si ha
[
]
cost −γ 2
2
l12 = - γ + 1 v v 1
cost p
1
[ pv]12 ⇒
⇒ l12 =
v ⇒ l12 =
γ
+
1
cost
1
γ
1
v −γ = p
cost
⇒ l12 =
1
[ p 2 v 2 − p1 v1 ]
1-γ
Raccogliendo p1v1 si ottiene
l12 =
p v
p v
1
1
p1 v1 2 2 − 1 =
p1 v1 1 − 2 2
1- γ
p1 v1
p1 v1
γ −1
Ma per una trasformazione adiabatica si ha
Pagina 36 di 37
γ
v
v
p
p1 v1 = p 2 v 2 ⇒ 2 = 1 = 2
p1 v 2
v1
γ
−γ
γ
Ponendo a sistema con la precedente
p v
1
p1 v1 1 − 2 2
l12 =
v
p1 v1
γ −1
1
2
⇒
l
=
p
v
12
1 1 1 −
−γ
γ −1
v1
p2 v 2
=
p
1 v1
−γ
v2
v1
v
1
=
p1 v1 1 − 2
v1
γ − 1
1−γ
⇒
v γ −1
1
l12 =
p1 v1 1 − 1
γ −1
v 2
γ −1
γ −1
γ
p
1
(γ −1)
2
v
l
=
p
v
1
−
T2
RT1 p 2 γ
12
1 1
1
⇒
=
⇒
γ −1
p1 ⇒ l12 = γ − 1 1 − p
T1
v 2
1
γ −1
pv = RT
T2 p 2 γ
=
T1 p1
Si definisce rapporto di espansione (β)
β = (p2/p1)
sostituendo si ha
γ −1
1
l12 =
RT1 1 − β γ
γ −1
Pagina 37 di 37