- Dipartimento di Fisica")
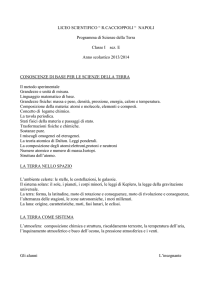
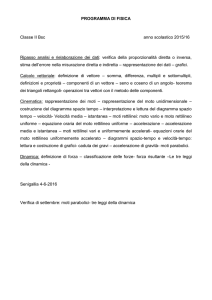
Consideriamo ancora l’accelerazione scomposta in comp.tang e radiale
e vediamo di ricavare analiticamente le relazioni già incontrate.
Δu
u(t+Δt)
Δθ
u(t)
Ricordiamo che la derivata di un vettore
w=(x,y,z) in forma cartesiana è^
dw/dt=(dx/dt î + dy/dt ĵ + dz/dt k)
Consideriamo un vettore u di modulo costante
e quindi anche un versore (|u |=1)
i) u•u=cost quindi d/dt (u•u)=0, dalla definizione di prodotto scalare
du/dt•u+ u•du/dt =2 u•du/dt=0 poiché è commutativo ma questo vuol
dire che la derivata du/dt è perpendicolare al vettore stesso.
^ |/Δt = ( Δθ |u
^ |)/Δt = Δθ /Δt
ii) Per un versore (Δθ è piccolo) d |Δu
nel limite per Δt →0, d θ /dt = ω (velocità angolare).
^ versore di du/dt
^
^
normale a u)
Mettendo insieme i) e ii) d ^u /dt = ω n^ (n
Consideriamo ora la velocità v=v ^τ (τ^ vettore tangente al posto di u)
G. Bracco - Appunti di Fisica
Generale
1
I versori ^τ e n^ definiscono un piano in 3D (piano osculatore). Definiamo
^ ^ ^
detto vettore binormale.
il vettore normale a tale piano b=τ×n,
Dal punto di vista cinematico,
conoscendo velocità ed acceleraz.
τ=v/v (versore tangente),
b=v ×a /(| v ×a |) e
n=b×τ (versore radiale centripeto).
L’accelerazione è scomponibile in
a=atτ+arn.
G. Bracco - Appunti di Fisica
Generale
2
Il vettore velocità angolare ω è perpendicolare al piano osculatore (la
direzione è quella dell’asse di rotazione istantaneo che determina la
rotazione di v e quindi ω è parallelo a b) con direzione definita dalla
regola della mano destra → (v n ω) formano una terna destra.
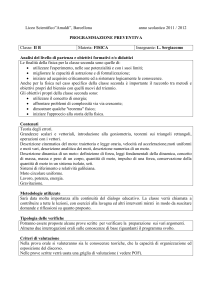
Consideriamo una traiettoria curvilinea la
velocità è v= v τ con τ tangente che varia da
^
n
punto a punto, da cui
^ l’accelerazione
^
^
a=dv/dt=dv/dt τ + v d τ /dt =
τ
=dv/dt τ + v ω × τ
ω
ω
v
×
Circ. osculatrice
Il modulo di ω è |ω|= v/r con r=raggio
circ. osculatrice, infatti istantaneamente il
corpo si muove di moto circolare e quindi
la seconda componente v ω × τ è diretta
verso il centro della circ. osculatrice
e di modulo v v/r =v2/r → acc. centripeta
G. Bracco - Appunti di Fisica
Generale
3
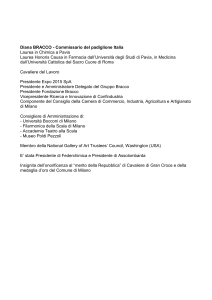
Questo modo di procedere deriva dalla rappresentazione intrinseca
della traiettoria:
definiamo una coordinata curvilinea s che misura la distanza
(rettificata) da un punto origine O (→ somma dei tratti tangenti
infinitesimi che misurano i cammini percorsi con segno + se nella
direzione positiva) e quindi la rappresentazione parametrica della
curva diviene
r= r(s) ovvero x=x(s) y=y(s) z=z(s)
s
O
precedentemente con la rappresentazione
cartesiana t era un parametro particolare,
il tempo, ora s è una distanza.
Alla rappresentazione intrinseca r= r(s) ovvero x=x(s) y=y(s) z=z(s)
aggiungiamo come varia s nel tempo s=s(t) (legge oraria)
in tal modo si è separata la dipendenza geometrica da quella temporale.
G. Bracco - Appunti di Fisica
Generale
4
s
→
Rettificazione della curva
O
O
s
^
Il vettore tangente alla curva sarà dr/ds=(dx/ds, dy/ds, dz/ds)= u (= τ)
e si può dimostrare che questo è il versore (nel limite la corda dr
diviene uguale all’arco ds) tangente alla traiettoria.
Perciò la velocità v=dr/dt=(dr/ds) (ds/dt) si separa nel versore tangente
e nel modulo v=v ^u = ds/dt ^u (rappresentazione intrinseca della
velocità)
^
^
l’accelerazione da quanto visto prima è a=dv/dt=dv/dt u + v du/dt =
=at u^ + v ω × u^ = d2s/dt2 u^ + (ds/dt)2/r ^n dove il versore n è stato
definito prima ed r è il raggio della circ. osculatrice nel piano
definito dai due versori (r definisce il raggio di curvatura della
traiettoria, 1/r è detta curvatura)
G. Bracco - Appunti di Fisica
Generale
5
Queste relazioni permettono di classificare i moti
v= ds/dt ^u
a=d2s/dt2 u^ + (ds/dt)2/r n^
basandoci sull’equazione oraria
moti con ds/dt=costante
moti uniformi
moti con d2s/dt2=costante moti uniformemente accelerati
basandoci sulla geometria della traiettoria
moti rettilinei
moti circolari
r → ∞ (curvatura=0)
r=cost
La trattazione cartesiana e quella intrinseca sono equivalenti, inoltre si possono
usare altre rappresentazioni basate su differenti tipi di coordinate le più usate, oltre a
quella cartesiana, sono: polare in 2D, sferica e cilindrica in 3D
G. Bracco - Appunti di Fisica
Generale
6
Esempio: nella descrizione del moto circolare uniforme (moto in 2D)
si introducono implicitamente le coordinate polari (r, θ)
x= r cos( θ )
y= r sin ( θ ) ciò era particolarmente comodo perché r=cost. e il
moto viene descritto solo da θ (legato all’ascissa curvilinea s=r θ
ma r=cost e si tien conto automaticamente di questo vincolo)
questo premette di introdurre variabili angolari per descrivere il moto
anziché variabili lineari
posizione
x→θ
posizione angolare
velocità
dx/dt = v → dθ/dt = ω velocità angolare
accel.tangenziale dv/dt = a → dω/dt = α accelerazione angolare
ovviamente le quantità sono collegate dalle seguenti relazioni
x= r θ
v= r ω at= r α
G. Bracco - Appunti di Fisica
Generale
7
Prendiamo in considerazione un moto rettilineo uniformemente
accelerato in rappresentazione cartesiana: Supponiamo il moto lungo x
ed integriamo nel tempo la velocità che a sua volta è l’integrale dell’accel.
.
⌠f
xf= xi +⎟ v(t)
⌡i
⌠f
dt= xi +⎟ (vi + a (t - ti)) dt=
⌡i
= xi + vi (tf - ti)+½ a (tf - ti)2
Sono possibili delle ovvie semplificazioni :
•se scelgo l’origine nel punto iniziale xi =0
•se scelgo l’origine dei tempi nell’istante iniziale ti =0
Quindi xf =v tf +½ a tf2 e facendo cadere il pedice f x =v t +½ a t2
(però bisogna ricordarsi che sono state fatte queste assunzioni)
vediamo delle utili formule che derivano da questo risultato
G. Bracco - Appunti di Fisica
Generale
8
1D: a=cost
moto rettilineo uniformemente accelerato
(v0 velocità iniziale, v velocità al tempo t)
1) v = v0+at
2) x-x0 = v0t+½at2 (x0 posizione iniziale, x posizione al tempo t)
ricaviamo il tempo t dalla seconda equazione t=(v-v0)/a
e messo nella terza (x-x0 )= v0 (v-v0)/a +½a((v-v0)/a)2
a(x-x0 )= v0 (v-v0) +½(v-v0) 2 = v0 v-v0 2 +½(v 2 +v0 2-2v0 v)=½(v 2 -v0 2)
3) v 2 =v0 2+2 a(x-x0 )
x-x0 = ½ v0t+½ (v0+at)t = ½ v0t+½ vt = ½ (v0+v)t
dove ½ (v0+v) = vel. media
4) x-x0 == ½ (v0+v)t
v0 = v - at , x-x0 = (v - at )t+½at2 = vt- ½at2 in funzione della vel. Finale
5) x-x0 = vt- ½at2
G. Bracco - Appunti di Fisica
Generale
9
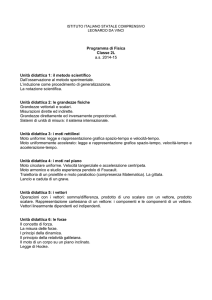
In 2D: per avere un moto in 2D occorre che a e v0 non siano paralleli
In particolare per la caduta dei gravi l’accelerazione è verticale e se
il moto ha una componente della velocità orizzontale esso avviene in
due dimensioni. Dal punto di vista cinematico abbiamo visto che esso
può essere trattato in modo indipendente lungo le due direzioni.
Nota: dal punto di vista dinamico questo potrebbe non essere vero:
ad es. se le accelerazioni (legate alle forze come vedremo in seguito)
dipendono dal modulo della velocità, la componente del moto x (o y)
sarà legata alla componente y (o x).
In generale il moto è di tipo parabolico essendo l’accelerazione costante
Esercizio: ricavare le seguenti quantità legate al moto di un proiettile
Gittata R= (v0 2 /g) sin (2 θ0) e massima quota h= (v0 sin (θ0)) 2 /(2g)
(g acc. di gravità, v0= vel. Iniziale, θ0 angolo di tiro)
G. Bracco - Appunti di Fisica
Generale
10
 - Dipartimento di Fisica")