Trasduttori:
E' un dispositivo in grado di trasformare le
variazioni di una grandezza fisica ,
normalmente non elettrica , in un'altra
grandezza , normalmente di natura elettrica
(tensione , frequenza o corrente).
E’ composto da due parti:
Sensore: un dispositivo che rileva le
variazioni di una grandezza modificando una
delle proprie caratteristiche fisiche,
Convertitore:E’ un circuito elettronico che
trasforma le variazioni di un parametro del
sensore in una variazione di una grandezza
elettrica.
Il sensore spesso è sensibile a variabili che
alterano il risultato della misura primaria,quindi
per ottenere un buon funzionamento bisogna
attenersi al data-sheet in cui sono descritti:
• I parametri caratteristici del sensore ;
•Gli schemi dettagliati piu comuni di utilizzo;
• I circuiti di prova per verificare le
caratteristiche;
Tipi di trasduttori:
Analogico: quando il suo segnale di
uscita è una grandezza elettrica che varia in
modo continuo mantenendo una doppia
corrispondenza con il valore della grandezza
misurata
Digitale:quando il suo segnale di uscita è
composto da uno o più segnali digitali che
possono assumere ciascuno solo due livelli di
tensione identificati come 0 e 1.
1
Attivi: Quando forniscono in uscita un
segnale direttamente utilizzabile da circuiti di
elaborazione senza nessun consumo di
energia elettrica.é il caso delle celle
fotovoltaiche e delle termocoppie.
Passivi: Sono quei trasduttori ai quali
bisogna fornire energia elettrica perché la
grandezza fisica d’uscita possa essere
trasformata in una grandezza elettrica.Ad
esempio il Potenziometro che fornisce in uscita
valori di resistenza diversi, a seconda della
posizione.
Caratteristica dei Trasduttori;
La Linearita’.
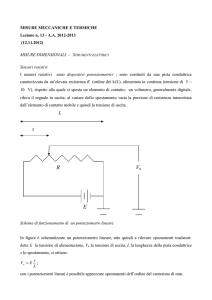
U
U=KI
Caratteristiche di trasferimento:
E' il legame che intercorre tra la variabile da
misurare (ingresso) e il segnale elettrico di
uscita del trasduttore.
I trasduttori la cui caratteristica è una retta
sono detti lineari.
Quando la retta non passa per l'origine la
variabile
d'uscita è diversa da zero in
corrispondenza del valore nullo della variabile
di ingresso. L'equazione è:
U=KI+offset
tgα=K
α
U=KI
Parametri caratteristici dei
sensori:
I
U: La grandezza di uscita del sensore
I: La grandezza da misurare
K: Coefficiente angolare
2
Si definisce offset il valore non nullo della
variabile di uscita corrispondente al valore
nullo della variabile d' ingresso.
U=Grandezza di uscita
U=KI+offset
offset
I=grandezza d' ingresso
Grandezza D’uscita
Linearità:
Il funzionamento ottimale di un trasduttore è
quello definito da una caratteristica lineare.
La linearità è il parametro che evidenzia la
deviazione tra la retta (caratteristica teorica)
e la curva reale.
La non linearità è il valore massimo della
deviazione rispetto alla curva teorica in
valore assoluto riferito al valore massimo del
segnale di uscita.
Un sensore è buono quando la sua non
linearità non è superiore allo 0.1%.
Range di funzionamento:
E' l'intervallo dei valori che può assumere la
grandezza che deve essere trasdotta.
U=Grandezza di uscita
Caratteristica reale
Range di
Funzionamento
Saturazione
Caratteristica Ideale
Deviazione
Zona lineare
I=Grandezza d' ingresso
Min
Max
3
Isteresi:
E' l' area racchiusa tra le due curve e
rappresenta una imprecisione di misura.
Sensibilità:
Più il coefficiente angolare della retta è elevato
più il trasduttore è sensibile e minore sarà il
range di funzionamento.
U
Maggiore pendenza⇒Trasduttore più sensibile.
E' il rapporto tra la variazione della grandezza
di uscita e la variazione della grandezza d'
ingresso che la provoca.
S=
Valore massimo di uscita
∆U1
∆U
∆I
Tempo di risposta:
E' il tempo che il trasduttore impiega per
raggiungere in uscita il valore di regime
corrispondente al valore d' ingresso.
∆U2
∆l
Tempo risposta
Risoluzione:
E' il rapporto percentuale tra la minima
variazione della grandezza di uscita in grado
di essere rilevata e il valore massimo del
fondo scala.
Ripetibilità:
E' la capacità di un sensore di fornire sempre
gli stessi valori di uscita in corrispondenza
dell' ingresso.
4
Classificazione in base a caratteristiche fisiche
resistivi:
resistivi: sfruttano la variazione della resistenza
(fotoresistori,
termoresistori,
sensori
di
posizione);
capacitivi: sfruttano la variazione della capacita'
di un condensatore (sensori di umidità);
elettroacustici: convertono segnali sonori in
grandezze elettriche (microfoni);
elettrodinamici: si basano sul principio della
forza elettromotrice per misurare velocita'
(dinamo tachimetrica);
Sensori di posizione a
potenziometro
elettromagnetici: utilizzano il principio
dell'induttanza elettrica per rilevare angoli
di rotazione;
magnetostritivi: si fondano sul principio
della permeabilita';
piezoelettrici: sfruttano l'originarsi di una
polarizzazione elettrica su facce opposte di
cristalli sottoposti a sollecitazioni (stress)
fisiche;
A
semiconduttore:
sfruttano
le
caratteristiche
della
giunzione
dei
semiconduttori (fotodiodi, fototransistor).
Sensori di posizione a
potenziometro
E’
possibile utilizzare come sensori
di posizione un reostato in modo da
convertire la posizione in una
variazione di resistenza infatti: R = ρ l
S
se avviene un allungamento
la
misura della resistenza consente di
misurare
indirettamente
lo
spostamento.
R + ∆R = ρ
l + ∆l
S
5
ENCODER INCREMENTALI
Un encoder in cui sia presente solo una serie di feritoie non
consente di individuare il verso in cui il disco ruota. Viene
ricavata una seconda serie di feritoie, sfalsata rispetto alla
prima di un quarto di passo, essendo il passo la distanza
tra due zone trasparenti successive. E' ovviamente
necessaria la presenza di una seconda sorgente luminosa
e di un secondo sensore.
Un codice binario puro non è tuttavia
adatto ad essere utilizzato in un
encoder. Si ha che in alcune
posizioni, passando da un numero
binario al successivo, varia più di una
cifra. Ad esempio passando dal n. 3
(011) al n. 4 (100) si ha una
variazione contemporanea di tutte e
tre le cifre.
L'elemento fotosensibile ( un
fotodiodo o un fototransistor)
genera un treno di impulsi ed il
loro numero è pari al numero
delle zone trasparenti, alternate
alle scure, intercettate dal
blocco emettitore-ricevitore .
Il conteggio di questi impulsi
consente di individuare la
rotazione compiuta dal disco
Encoder assoluti
In questi encoder non si ha una
semplice successione di zone chiare
e di zone scure, ma le zone chiare e
quelle scure, rappresentano, lette su
una linea perpendicolare alle piste o
su un raggio una parola in un certo
codice binario.
0
7
1
6
2
5
4
Codice Gray
3
6
ENCODER INCREMENTALI ED ASSOLUTI
ENCODER
INCREMENTALE:
contando gli impulsi permette
di valutare lo spostamento
rispetto ad una posizione
iniziale
ENCODER ASSOLUTO:
fornisce la posizione assoluta
I RESOLVER
fotorivelatori
LED
fotorivelatore
tracce
ogni livello ha una risoluzione doppia rispetto a quello inferiore; con 10 tracce
10
vengo ad avere una risoluzione di 2 =1024 impulsi per giro (nota: i segnali
provenienti dai fotorivelatori possono essere interpretati direttamente come
una codifica binaria della posizione)
Il resolver è un trasduttore per la
misura di spostamenti angolari
molto utilizzato sia nel campo delle
macchine utensili che della
robotica I due solenoidi, di cui uno
fisso e l’altro rotante, sono disposti
intorno ad uno stesso nucleo di
ferro, fatto di lamierini isolati: in
base alle loro posizioni reciproche
tutto il flusso dovuto al primo
avvolgimento risulta concatenato
totalmente o solo parzialmente con
il secondo. Si avrà perciò una
tensione indotta avente
caratteristiche che dipendono dalla
loro posizione reciproca.
RESOLVER – senza spazzole
I resolver
Negli avvolgimenti di statore si generano quindi f.e.m. sinusoidali di
ampiezza proporzionale
rispettivamente a sen(q) e cos(q).
Le tensioni prodotte negli avvolgimenti di statore vengono elaborate da
un circuito elettronico (spesso
contenuto in un ASIC) che ne rivela le ampiezze relative, ricavandone
la posizione angolare q. Lo stesso
circuito calcola anche la velocità angolare ω
avvolgimenti di statore
primario del trasformatore
rotante (f=8 kHz)
albero per
l’accoppiamento
al motore
avvolgimenti di rotore secondario del
trasformatore rotante
statore
Ve=10 V
8 kHz
rotore
statore
VR
V2
V1
statore
7
inductosyn
SENSORI DI VELOCITA’
L’inductosyn può esser considerato la versione lineare del
resolver.
In esso lo statore viene sostituito da una scala o regolo in
materiale isolante su cui è presente un circuito stampato a
greca avente passo p e la lunghezza necessaria.
La greca sostituisce il solenoide nello statore.
I tachimetri elettronici basano il loro funzionamento su un encoder
che fornisce una sequenza di impulsi grazie a una coppia ledfotodiodo in genere integrati nell’encoder.
I tachimetri digitali possiedono un generatore di clock il cui
compito è di fornire una finestra temporale di durata costante che
abilita il conteggio di un contatore.
Un’altra
grandezza fisica di notevole
importanza nelle applicazioni e negli
automatismi è la velocità. Per realizzare
trasduttori di velocità lineare o angolare
possono essere utilizzati dispositivi
elettromeccanici come la dinamo
tachimetrica oppure dei tachimetri
elettronici.
8
Accanto alla versione digitale che consente
comunque un immediato interfacciamento con
microcontrollori è possibile realizzare un analogo
circuito analogico.
Gli impulsi provenienti dall’encoder sono squadrati da
un circuito a trigger di Smidth, poi, tramite un
convertitore frequenza tensione, gli impulsi sono
trasformati in una tensione proporzionale alla
frequenza e quindi alla velocità dell’encoder.
E’
La dinamo tachimetrica
La
dinamo tachimetrica è un piccolo
generatore di corrente continua. Nello
statore è presente un magnete
permanente. Il rotore racchiude
l’avvolgimento indotto. Rispetto le
tradizionali dinamo si pone molta cura
nella costruzione per evitare attriti e
eccentricità che falserebbero la lettura.
importante nell’utilizzo di far lavorare
la dinamo tachimetrica a vuoto per
evitare che la misura sia falsata dalle
cadute di tensione sulla resistenza degli
avvolgimenti del rotore.
N
+
+
+
+
+
++ + +
S
9
Si ricorda che una spira conduttrice
interessata da un flusso variabile nel tempo
produce ai suoi capi una f.e.m.
l’andamento di tale forza elettromotrice è
sinusoidale.
Ora ciascun avvolgimento contribuisce alla
tensione complessivo con una propria
tensione ed ogni f.e.m. sarà sfasata rispetto
la precedente
La somma di queste sinusoidi sfasate
fornisce una tensione pressoché continua ma
che presenta una certa ondulazione, la
tensione, pertanto, deve essere filtrata per
evitare problemi nei sistemi di controllo
La tensione continua in uscita è legata alla
velocità di rotazione dalla relazione
dove KD è la costante della dinamo mentre
ω è la velocità angolare in giri /min.
Per le dinamo tachimetriche commerciali la
KD vale 60÷90 V per 1000 giri/min
TACHIMETRI A CORRENTE CONTINUA
strutturalmente sono dei piccoli generatori in corrente continua
eccitati con magneti permanenti (AlNiCo: stabilità termica)
V = k Φn
Sensori di temperatura
n: n° di giri/min
scostamenti dalla proporzionalità:
• dissimmetrie costruttive (squilibrio del rotore, irregolarità del
traferro, ecc.)
• caduta di tensione alle spazzole (la corrente assorbita deve essere
piccola per evitare l’effetto della reazione di indotto): si usano
quindi spazzole con basse cadute (contenenti polvere di Ag)
errore di linearità ε=δV/ VM : massimo
scostamento δV dalla retta ideale,
riferito al valore di fondo scala VM
scostamenti tra la caratteristica reale e
ideale di un tachimetro in c.c.
10
materiale A
La termocoppia
T0
dispositivo costruttivamente è
una giunzione metallurgica di due
metalli diversi che genera una d.d.p.
quando è sottoposto ad una differenza
di temperatura (effetto Seebeck e
Thomson).
T1
Questo
I
costruttori per ciascuna termocoppia
metallica forniscono la tabella dei valori
di tensione per ciascun valore di
temperatura
materiale B
Se i conduttori sono
lasciati
aperti
misureremo
una
d.d.p..
TERMORESISTORI
tipo J
tipo K
tipo N
tipo T
tipo R
-60
-200
-230
-200
-50
+850
+1100
+1330
+400
+1350
conduttor
e1
Fe
Ni-Cr
Nicrosil
Cu
Platino-rodio
conduttor
e2
Ni-Al
Ni-Al
Nisil
Costantana(
CuNi)
platino
Tmin
[°C]
Tmax[°C]
. Se i conduttori sono
chiusi ad anello si
determina
una
corrente che circola
nel circuito.
La resistività dei metalli varia con la
temperatura. Oltre i -200°C, la resistività
varia quasi linearmente con la temperatura.
In questa
regione approssimativamente
lineare, la variazione di resistività (ρ) con la
temperatura (T) può essere adeguatamente
descritta da un’equazione quadratica:
11
I
PTC (Positive Temperature Coefficient
Resistors) sono realizzati con
ceramiche semiconduttrici di elevata
purezza. Basate su composti di Titanio
(BaTiO3, SrTiO3, ecc.), il loro specifico
comportamento è ottenuto dall’aggiunta
di drogante in un unico processo, che
include elevate pressioni necessarie per
la sinterizzazione dei materiali.
Gli NTC manifestano una diminuzione della
resistenza elettrica con l’aumento della
temperatura.
Sono usati in un intervallo di temperatura di 50°C fino 150°C, e anche oltre fino a 300°C
per alcuni dispositivi incapsulati nel vetro.
Il valore di riferimento di un termistore è
tipicamente riferito a 25°C (abbreviato come
R25). Per molte applicazioni, i valori R25
sono compresi tra 100Ω e 100kΩ. Altri valori
R25 possono essere prodotti e hanno come
valore basso 10Ω e come alto 40 MΩ .
I PTC hanno un’unica
caratteristica
ResistenzaTemperatura.
Essi
manifestano
una
bassa
resistenza per un ampio
range i temperatura, ma
appena raggiungono una
specifica
temperatura,
subiscono una
crescita
repentina della resistenza
(diversi ordini di ampiezza)
Questa temperatura è detta
di "Curie" o "Switching
Point".
Caratteristica
di un
ntc
12
L’effetto Hall
PT100
Molto diffuse sono le cosiddette Pt100 e
Pt1000, ovvero termoresistenze in platino
(Pt), in cui la resistenza alla temperatura di 0
°C è pari rispettivamente a 100 Ω e 1000 Ω.
Secondo la norma IEC 751 (1995) le Pt100 sono
classificate a seconda della tolleranza nella
misura fornita:
Pt100 Classe A ±0,15 °C [0 °C] ±0,06 Ω [0 °C]
Pt100 Classe B ±0,30 °C [0 °C] ±0,12 Ω [0 °C]
B
Nel
19° secolo Edwin Hall collegò un
filo su entrambi i lati di un pezzo
rettangolare di oro. Facendo passare in
presenza di un flusso magnetico una
corrente elettrica attraverso la
lunghezza del foglio misurò una
tensione collegando un voltmetro tra
due punti dei lati opposti della lamina
d’oro
l’arseniuro di gallio(GaAs) e l’arseniuro di indio (InAs)
producono tensioni di Hall relativamente alte e
consentono la realizzazione di sensori per la ricerca
scientifica e l’industria.
Come sensori i generatori ad effetto Hall trovano impiego per
rilevare le correnti, i campi magnetici o come interruttori
controllati da un campo magnetico si possono rilevare per
esempio la velocità di rotazione di alberi meccanici.
L
--
-
VH
v∆
t
--
v
-
--
-
h
-
-
-
-
-
I
ciascuna carica sente una forza :
F=qvB
Nel nostro caso le cariche sono negative
(forza negativa rispetto la convenzione) per
cui la forza tende a spostare le cariche verso
sinistra in figura.
13
STRAIN GAUGES* ( misuratori
di sforzo)
Ci
sono diversi metodi per misurare gli
sforzi, molti dei quali sono basati su
misure di spostamento.
Gli strain gauge di tipo elettrico
realizzano una misura di tipo mono o
bidimensionale,.
Sensori piezoelettrici
si
basano sulla misura della carica
elettrica che compare sulla superficie di
cristalli speciali (quarzi, topazi, sale di
Rochelle) quando sono sottoposti a
stress meccanici.
14
Sensori ottici
Normalmente
I = − I L + I 0 (e
qV
kT
fotodiodo
+
+
+
----------
n
++++++++++
i diodi sono contenuti in
contenitori oscuri per cui l’unico
contributo per tale passaggio di banda è
legato al calore, se la giunzione è resa
trasparente o meglio si concentra la
luce tramite una lente sulla giunzione si
aumenta l’intensità di tali portatori
all’aumentare dell’illuminamento.
La relazione che esprime la corrente
I principali sensori ottici sono il fotodiodo, i
fototransistor e le fotoresistenze.
simbolo del fotodiodo e del fototransistor.
I fotodiodi basano il loro funzionamento sul
fatto che in polarizzazione inversa la corrente
inversa aumenta se si illumina la giunzione.
Infatti, i portatori minoritari, elettroni nella
zona p e lacune in n, si liberano dal legame
chimico passando dalla banda di valenza a
quella di conduzione in misura maggiore se
colpiti da un quanto energetico sufficiente a
fargli compiere il balzo.
p
-
− 1)
+ -
E
15
Le caratteristiche del fotodiodo V-I sono rappresentate in
figura ed esprimono la relazione V-I in funzione
dell’illuminamento incidente espresso in lux o in W/cm2.
Gli estensimetri a resistenza sfruttano la variazione
della resistenza dovute alle deformazioni elastiche
dei conduttori che sono disposti a serpentina per uno
sviluppo complessivo in lunghezza considerevole
(vedi figure). Quando il materiale è allungato i
conduttori diventano lunghi e stretti, ciò aumenta la
resistenza. Questo cambio di resistenza è convertito
in una tensione tramite un ponte di Wheatstone. Il
valore di tensione così ottenuto è linearmente
dipendente dallo sforzo tramite una costante
chiamata “ gauge factor”.
16