UNIVERSITÀ DEGLI STUDI DI TRIESTE
FACOLTÀ DI SCIENZE MATEMATICHE, FISICHE E NATURALI
TESI DI LAUREA
IN
FISICA
Studio “in vivo” dei fasci neuronali
con imaging NMR in diffusione
Laureando:
Relatore:
Alberto BATTAIA
Prof.ssa Renata LONGO
Anno Accademico 2010/2011
Indice
Introduzione
1
1 Risonanza Magnetica Nucleare
2
2 Diffusion Tensor Imaging
5
2.1
Principi fisici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.2
Tensore di diffusione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.3
Fiber Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
2.3.1
Approccio deterministico . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
2.3.2
Approccio probabilistico . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
3 Risultati e Conclusioni
14
3.1
Apparato sperimentale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
3.2
Risultati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
3.2.1
DTI Studio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
3.2.2
FSL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
3.3
Bibliografia
31
Acronimi
33
i
ii
Introduzione
L’Imaging di Risonanza Magnetica Nucleare o Magnetic Resonance Imaging (MRI) è una
tecnica di acquisizione e ricostruzione delle immagini tomografiche usata per scopi medici. Le forti
potenzialità, le vaste aree di ricerca possibili oltre alla mancanza di controindicazioni cliniche ne
hanno determinato un rapido e determinante sviluppo negli ultimi anni. L’assenza di radiazioni
ionizzanti nell’utilizzo di questa, infatti, permette esami ripetuti e frequenti anche per scopi di
ricerca. In questa tesi mi propongo di esporre le principali caratteristiche dell’ MRI per arrivare
a discutere uno degli ambiti di ricerca più attuali: il Diffusion Tensor Imaging (DTI). Studiando
la diffusione dell’acqua nell’encefalo si può arrivare a “ricostruire” i fasci neuronali della materia
bianca . Le virgolette sulla parola ricostruire sono d’obbligo poichè non è possibile vedere la
distribuzione spaziale dei singoli neuroni date le dimensioni di questi (ø ' 25 µm) rispetto a
quelle visualizzabili nei pixel fisici (chiamati voxel) della MRI di volume ' (2 × 2 × 2) mm3 .
Quello che si ricostruisce sarà quindi una fibra virtuale che rappresenta la direzione principale di
diffusione del gruppo di fibre reali passanti per quel determinato voxel.
La tecnica DTI può essere utilizzata per la trattografia dell’encefalo di pazienti malati in modo
da capire cosa la malattia provochi al livello della materia bianca e per poter trattare chirurgicamente la persona triducendo al minimo i danni funzionale. Un esempio è quello del cancro al
cervello: è utile capire se la zona tumorale inglobi i principali fasci neuronali oppure se questi
fasci sono solamente stati spostati dal tumore rendendo così possibile un’operazione chirurgica.
Una futura possibile frontiera della DTI è quella di poter comprendere come agiscano alcune malattie, ad esempio la Sindrome di Alzheimer o la Sclerosi multipla, per pensare successivamente
di trovare anche una cura. Uno dei primi e immediati successi del DTI è stata la possibilita di
valutare il sospetto di un ictus ischemico acuto.
Partendo dai principi fisici della Nuclear Magnetic Resonance (NMR) si passa per la descrizione
del DTI fino ad arrivare alla presentazione di due diversi approcci alla trattografia dell’encefalo
nella teoria del tensore di diffusione: deterministico e probabilistico. Questi diversi approcci sono
stati studiati con l’uso di due differenti programmi: DTI Studio per l’approccio deterministico e
FSL per quello probabilistico. Studiando i risultati dei due programmi si discute sulla convenienza
nell’uso di uno dei due in ambito clinico o in ambito di ricerca tenendo anche conto delle differenze
in tempo di computazione per i due diversi metodo. Si valutano inoltre i vantaggi dell’aumento del
numero di direzioni di diffusione dei gradienti rispetto ad un aumento del tempo di acquisizione
delle immagini.
Tutte le immagini sono state acquisite su volontari sani ai quali è stato chiesto di compilare
il modulo di verifica della compatibilità del soggetto con l’esame e del consenso informato. Il
tomografo per l’acquisizione MRI si trova presso l’Ospedale Universitario di Cattinara a Trieste
ed è stato utilizzato nel periodo di chiusura estiva pomeridiana del mese di agosto.
1
1 Risonanza Magnetica Nucleare
La Risonanza Magnetica Nucleare (RMN), o più comunemente chiamata NMR dall’inglese, si
basa sull’interazione tra i momenti magnetici dei nuclei con campi magnetici. Con questa tecnica
si possono quindi studiare solamente nuclei con momento magnetico intrinseco, cioè quelli con
numero dispari di protroni e/o di neutroni.
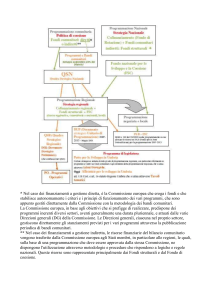
~ 0 , i momenti magnetici dei nuclei si dispongono
In presenza di un campo magnetico statico H
~ 0 [3]. Se prendiamo per esempio un sistema di
su due angoli ben precisi rispetto al verso di H
protoni di spin 1/2, questi si posizioneranno su due differenti livelli energetici corrispondenti
alle due diverse proiezioni di spin m = ±1/2 (il livello con m = −1/2 ha energia maggiore).
~ 0 e dal momento
La differenza tra le due energie dipenderà dal campo magnetico costante H
magnetico del protone µ
~:
∆E = 2µH0 ,
(1.1)
~ 0 = γH0 m ,
µ
~ ·H
(1.2)
dove:
con γ rapporto giromagnetico tipico del nucleo studiato. Nel caso dell’imaging diagnostico si
utilizza quasi esclusivamente il nucleo di idrogeno, quindi il protone isolato.
I momenti magnetici inizieranno inoltre a precedere attorno alla direzione del campo magnetico
con pulsazione detta di Larmor ωL tale da essere ~ωL = ∆E = ~γH0 .
Figura 1.1 Protoni in campo magnetico costante di intensità B0
2
A livello macroscopico ci saranno N1 momenti magnetici nel verso di H0 e N2 nel verso opposto dove, a causa della differenza energetica (1.1), N1 N2 . La somma di tutti i momenti
~ diretta nello stesso verso del
magnetici genererà quindi una magnetizzazione macroscopica M
campo magnetico statico. A questo punto punto utilizzando un impulso a Radio Frequenza (RF)
con ω = ωL eccito i protoni a energia più bassa facendoli saltare nel livello energetico più alto
con m = −1/2. Agendo in questo modo i protoni aquisiscono coerenza di fase dando come effetto
~ rispetto ad H
~ 0 (inizierà anche M
~ a precedere attorl’aumento della componente trasversale di M
~ 0 con pulsazione ωL ). La componente parallela invece diminuisce fino a poter diventare
no ad H
nulla o negativa in funzione del tempo di applicazione dell’impulso eccitazione a RF. Se applico
un impulso a 90° annullo Mk e rendo M⊥ massima, mentre si inverto completamente il verso
~ annullando nuovamente M⊥ ho applicato un impulso detto a 180° . Finita l’eccitazione
di M
a RF i protoni tenderanno nuovamente alla situazione di equilibrio diseccitandosi e generando
quindi onde elettromagnetiche che verranno acquisite attraverso l’uso di una bobina che fungerà
da antenna per il segnale di rilassamento.
Agendo con diversi gradienti di campo magnetico (variazioni lineari del campo magnetico in
una direzione fissata) riesco ad avere per ogni voxel presente diversi valori di fase e frequenza
tali da poter selezionare i segnali presenti dalle singole porzioni.
– Selezione della fetta: si applica un gradiente nella direzione ẑ nel periodo di applicazione
dell’impulso a RF in modo da stimolare solamente gli elettroni di una determinata fetta.
Figura 1.2 Selezione della fetta
– Codifica di fase: dopo l’impulso RF, ma prima dell’acquisizione dei dati, applico un
gradiente di campo magnetico nella direzione ŷ in un tempo ∆t necessario a provocare una
differenza di fase tra gli spin dei nuclei in funzione della coordinata y.
– Codifica in frequenza: dopo l’impulso RF e durante l’acquisizione del segnale emesso
dai protoni si applica un gradiente nella direzione x̂ in modo da avere diverse frequenze di
rilassamento in funzione della posizione; attraverso la trasformata di Fourier si passa poi
dallo spazio delle frequenze e delle fasi a quello delle coordinate.
3
Figura 1.3 Codifica in frequenza
4
2 Diffusion Tensor Imaging
Nel 1827 Robert Brown, un botanico scozzese, mentre studiava al microscopio ottico il polline di
un fiore in un vetrino, si accorse come queste particelle si muovessero continuamente. Studiando
altri campioni di materia si accorse che anche questi si comportavano come il polline. Adesso
sappiamo come questo moto, chiamato browniano appunto, sia dovuto all’agitazione termica
dell’acqua. Nel 1905 Einstein arrivò a caratterizzare lo spostamento medio delle molecole r
in funzione del tempo di attesa t e di una costante D detta costante di diffusione tipica del
materiale in cui le particelle erano immerse a temperatura costante [8]. L’equazione di Einstein
è la seguente:
hr2 i = 6Dt ,
(2.1)
dove la distribuzione degli r2 ha una forma gaussiana.
Nella Risonanza Magnetica in Diffusione, la Diffusion Weighted (DW) MRI, si utilizza come
sonda il moto browniano delle molecole d’acqua per studiare le caratteristiche delle strutture dei
tessuti. Quando ci sono degli impedimenti nel moto delle molecole di acqua allora la dispersione
media delle stesse sarà minore rispetto ad una condizione senza impedimenti.
2.1 Principi fisici
Per studiare la diffusione delle molecole d’acqua (contenenti nuclei di idrogeno e quindi studiate
con MRI) attraverso la NMR si usa una sequenza di gradienti e impulsi RF denominata sequenza
di Stejskal-Tanner [13, 3] . Questa è una sequenza di tipo Spin-Echo (SE) alla quale viene
aggiunta l’applicazione di due gradienti di campo magnetico detti gradienti di diffusione, uno
prima e uno dopo l’impulso a 180° e distanziati da un tempo ∆ . Inizialmente si applica un
impulso a 90° per eccitare i protoni, in seguito si genera un gradiente di campo magnetico G in
direzione dˆ fissata, di durata δ, in modo da far variare le fasi degli spin lungo quella direzione
(la frequenza di precessione è funzione del campo magnetico). Dopo l’applicazione dell’impulso
a 180° che ha la funzione di invertire le posizioni di precessione degli spin, viene acceso lo stesso
gradiente di campo magnetico G di durata δ uguale alla precedente.
Se le molecole d’acqua non si sono spostate lungo la direzione del gradiente allora il segnale
di eco misurato sarà uguale al segnale d’eco di una sequenza SE non sensibile alla diffusione e
dipendente quindi dal tempo di rilassamento spin-spin T2 . Se invece c’è stato uno spostamento
lungo dˆ si avrà una diminuzione del segnale d’eco dovuta al non ritorno alla coerenza di fase di
precessione degli spin al momento della formazione del segnale di eco e della raccolta del segnale.
Questo contrasto nel segnale generato della applicazione di gradienti di diffusione e chiamato
5
Figura 2.1 Sequenza di Stejskal-Tanner
contrasto pesato in diffusione (DW) e può essere descritto con un modello esponenziale [9] :
Si = S0 · e−b·ADCi ,
(2.2)
dove Si è il segnale DW in un voxel con gradiente di diffusione nella i-esima direzione, S0 è
l’intensità dello stesso segnale senza gradienti applicati (normale sequenza SE), ADCi è il coefficiente apparente di diffusione nella i-esima direzione, b, chiamato b-value, è un fattore dipendente dall’ampiezza G , durata δ e distanza temporale ∆ dei gradienti di diffusione. Supponendo
l’applicazione dei gradienti come rettangolare, allora il b-value sarà:
δ
b=γ G δ ∆−
,
3
2
2 2
(2.3)
dove γ è il rapporto giromagnetico del nucleo (nel nostro caso 1 H ).
Come si può notare dall’equazione (2.2) le immagini DW dipendono dal segnale S0 . Per
togliere questa dipendenza si è soliti utilizzare immagini con contrasto in Apparent Diffusion
Coefficient (ADC) oppure in Attenuation Coefficient (AC) calcolati come segue:
ln
ADCi = −
SACi =
Si
S0
b
,
Si
= e−b·ADC .
S0
(2.4)
(2.5)
Queste immagini, per come sono effettuate le misure, sono dipendenti dalla direzione in cui si
applica il gradiente di campo magnetico. Per poter avere immagini non dipendenti dalla direzione
si effettuano le misure su un serie di 3 immagini con gradienti perpendicolari e si prende come
ADC totale la media dei 3 ADC. Si ha per l’immagine in diffusione:
6
SDW I = S0 e−b·ADC = S0 e−b·
ADC1 +ADC2 +ADC3
3
=
p
3
S1 · S2 · S3 .
(2.6)
2.2 Tensore di diffusione
La diffusione anisotropica in 3D, come quella presente nei fasci neuronali della materia bianca,
non viene pienamente descritta con l’utilizzo di un coefficiente scalare come l’ADC. Per questo
motivo si è introdotto il formalismo del tensore di diffusione D per caratterizzare diffusioni
Gaussiane in cui gli spostamenti medi non sono uguali in tutte le direzioni; questo ha portato
subito a risultati molto soddisfacenti. Il tensore di diffusione è una matrice 3 × 3 simmetrica
rispetto alla diagonale e rappresenta dal punto di vista geometrico un ellissoide di diffusione;
bisogna così acquisire almeno 6 immagini con direzioni di gradiente differenti.
Dxx Dxy Dxz
D = Dyx Dyy
Dzx
Dzy
Dyz .
Dzz
(2.7)
La simmetria della matrice D è una conseguenza immediata della sequenza di Stejskal-Tanner
dove non possono essere distinte le immagini prese in direzioni polari opposte; questa proprietà
deve essere presa in considerazione per non prendere immagini collineari che non danno risultati
indipendenti.
Figura 2.2 Interpretazione geometrica del tensore di diffusione [9]
A questo punto applichiamo una matrice di rotazione R in modo da rendere D della forma:
7
λ1
0
0
Λ= 0
λ2
0
0
0 = R · D · RT ,
λ3
(2.8)
dove λ1 è l’autovalore associato all’autovettore ~v1 di modulo massimo.
L’autovettore ~v1 , chiamato autovettore primario, insieme all’autovalore λ1 rappresentano rispettivamente la direzione e il valore di diffusione massimo. Al contrario λ2 e λ3 ci daranno
informazioni sulla diffusione nel piano trasverso a ~v1 . La diffusione media Dav sarà data dalla
media dei tre autovalori:
Dav = λ =
λ1 + λ2 + λ3
=
3
tr D
3
(2.9)
,
dove con tr(D) indico la traccia del tensore di diffusione.
Il sistema di autovettori/autovalori non cambia con la rotazione del tensore di diffusione rendendo così ogni funzione degli autovalori indipendente dalla direzione delle immagini prese. Possiamo così definire due quantità che ci danno informazioni sull’anisotropia di un voxel: la Relative
Anisotropy (RA) e la Fractional Anisotropy (FA).
r
RA =
r
FA =
q
1
3
2
+ λ2 − λ
2
+ λ3 − λ
2
,
(2.10)
2
2
2
λ1 − λ + λ2 − λ + λ3 − λ
q
.
λ21 + λ22 + λ23
(2.11)
λ
q
3
2
λ1 − λ
Figura 2.3 Esempio di immagini FA dell’encefalo in sezioni coronali
In ambito clinico si utilizza maggiormente l’indice FA i cui valori variano tra 0 e 1 dove
0 rappresenta una diffusione isotropica (ellissoide di diffusione uguale ad una sfera) mentre 1
rappresenta una diffusione completamente anisotropica (λ1 6= 0 ∧ λ2 = λ3 = 0) . Naturalmente 0
e 1 sono due casi limite non raggiungibili sperimentalmente. Per diminuire l’effetto del rumore
8
sulle misure non ci limitiamo a prenderle solamente con 6 direzioni di gradiente (più l’immagine
b0 senza applicazione di gradienti), ma anche con 15, 32, 64 e 128. In questo modo possiamo
fare una stima dei miglioramenti nel calcolo di D tenendo anche conto dell’aumento del tempo
totale necessario ad effettuare le misure.
Utilizzando le informazioni contenute nel tensore di diffusione si possono ottenere delle mappe
codificate a colori di orientazione delle fibre nella materia bianca come nello studio effettuato
nel 1997 da Jones et. al. [7] e Pierpaoli [11]. L’idea di base è quella di utilizzare diversi colori
per diverse orientazioni delle fibre: il rosso per la direzione sagittale (destra-sinistra), verde per
quella coronale (avanti-indietro) e blu per quella assiale (alto-basso).
Figura 2.4 Esempio di immagine a colori codificati con alcuni fasci di fibre evidenziati [10]
Con l’ultilizzo delle immagini con codifica a colori si riuscirono a ricostruire i principali fasci
neuronali e confrontarli con le conoscenze anatomiche dando risultati che sottolinearono le potenzialità del DTI per l’analisi morfologica “in vivo” della materia bianca. La limitazione di questa
tecnica consiste però nella difficolta di visualizzazione dei fasci in immagini bidimensionali.
9
2.3 Fiber Tracking
Verso la fine degli anni ’90 si introdusse il concetto della ricostruzione di traiettorie 3D nella
materia bianca, chiamata trattografia o Fiber Tracking (FT). In ogni voxel si può prendere
come direzione predominante dei tratti di assoni quella dell’autovettore primario v1 del tensore
di diffusione. Bisogna però sempre tenere presente che le dimensioni di un voxel sono dell’ordine
dei 10 mm3 mentre quelle di un neurone dell’ordine dei µm: l’autovettore primario ci dà quindi
informazioni sulla direzione principale di propagazione in un fascio di neuroni. Un problema
che deriva da queste proprietà del tensore di diffusione è quello di riconoscere sdoppiamenti
e ancor di più incroci di fasci dove una singola direzione nel voxel non basta. Nuove teorie
che si basano sull’utilizzo di diversi tensori per ogni voxel (High Angular Resolution Diffusion
Imaging (HARDI)) o che abbandonano la teoria del tensore (Q-ball Imaging e Diffusion Spectrum
Imaging (DSI)) sono state sviluppate negli ultimi anni per risolvere questi problemi aumentando
però notevolmente il tempo necessario ad effettuare le misure e il tempo di calcolo degli algoritmi
di FT. Gli algoritmi di FT possono essere a grandi linee suddivisi in due diversi approcci:
deterministico e probabilistico.
2.3.1 Approccio deterministico
I lavori iniziali nel campo del DTI vengono focalizzati sullo sviluppo di algoritmi deterministi
nella ricostruzione di fasci neuronali. Uno degli algoritmi principalmente utilizzati è il Fiber Assignment by Continuous Tracking (FACT) in cui si fanno partire le traiettorie da una zona definita
dall’utente. L’algoritmo inizia seguendo la direzione dell’autovettore primario fino ad arrivare al
bordo del voxel dove inizia a seguire la direzione dell’autovettore primario del voxel succesivo.
Solitamente si impongono due limiti per fermare l’algoritmo in modo da evitare l’ingresso in zone
con alta indeterminazione su ~v1 (come nella materia grigia) e il ritorno di una fibra su se stessa.
Vi è quindi un limite inferiore per la FA e un limite superiore per l’angolo che si forma tra le
direzioni di due voxel successivi. Queste soglie ci assicurano di non visualizzare numerose fibre
che anatomicamente non esistono (falsi positivi) e possono essere decise dall’utente in funzione
delle sue conoscenze anatomiche e della zona che stiamo studiando. I risultati di questo approccio vengono visualizzati tramite immagini tridimensionali delle fibre calcolate così da permettere
una facile comprensione della posizione di queste ultime nell’anatomia dell’encefalo.
Ci sono due problemi principali sugli algoritmi di FT con approccio deterministico. Innanzitutto con questo approccio vi è una sola traiettoria ricostruita per ogni punto d’origine (o
tuttalpiù si possono far partire più traiettorie per ogni voxel come in figura 2.5) scelto dall’utente: le ramificazioni dei fasci non vengono computato. Come seconda cosa non vi è un livello di
confidenza da poter associare alle traiettorie ricostruite poichè non si tiene conto dell’incertezza
sulla determinazione della direzione principale di propagazione. Questo problema rende difficile
l’individuazione di casi falsi positivi e presenta inoltre casi di falsi negativi cioè non viene fatta
la ricostruzione di fibre realmente esistenti).
10
Figura 2.5 Esempio che mostra l’algoritmo FACT. Le frecce rappresentano gli autovettori primari
per ogni voxel mentre le linee rosse sono le traiettorie descritte dall’algoritmo
2.3.2 Approccio probabilistico
Nell’approccio probabilistico invece di ricostruire una singola traiettoria per ogni voxel di
partenza si fanno partire un gran numero di percorsi possibili. Ad ogni step del percorso la
direzione verso la quale si orienta la fibra viene presa da una distribuzione di possibili orientazioni.
La distribuzione di densità di probabilità viene stimata attraverso una funzione empirica basata
su vari parametri dei quali il principale è la FA. I criteri per terminare la trattografia della
fibra si basano sull’angolo massimo tra le direzioni prese in due voxel (lo si pone solitamente
di poco inferiore ai 90° ) consecutivi e il controllo del non ritorno con la stessa fibra in un
voxel già ispezionato (loop-check). Questo metodo permette di portare con sè informazioni
sull’indeterminazione nel calcolo della direzione dell’autovettore principale ed è per questo che
non c’è bisogno di avere un limite inferiore sulla FA. Questa proprietà permette di espandere la
trattografia anche a zone in cui la FA è bassa dove il metodo deterministico si ferma (per esempio
materia grigia o porzioni in cui è presente il liquor).
Il risultato finale di questo algoritmo è la costruzione di mappe in proiezioni ortogonali pesate in
funzione di quanti percorsi sono passati per un determinato voxel. Queste mappe rappresentano
quindi un criterio di likelihood di connessione tra le varie parti dell’encefalo. I risultati sono
fortemente dipendenti dal numero di direzioni di diffusione applicate durante l’acquisizione e
necessarie per la determinazione della funzione di densità di probabilità empirica. La forza di
questo metodo sta nel riuscire a limitare i casi di falsi positivi infatti con l’utilizzo di una soglia
minima sul contrasto dell’immagine si possono togliere tutte quelle zone in cui sono arrivati pochi
percorsi e quindi con ogni probabilità dovute a rumore e non a strutture anatomiche. Questa
soglia deve però essere decisa dall’utente sulla base di conoscenze anatomiche e stimata in modo
da togliere le zone di falsi positivi, ma non quelle lontane dalla Region Of Interest (ROI) da noi
selezionata. Con l’allontanarsi dal seed point infatti si ha una diminuzione dei percorsi passanti
per i voxel, questo effetto è una conseguenza immediata del tipo di algoritmo che si basa su
un modello Bayesiano. Bisogna quindi sempre tenere presente che, nonostante il DTI sia l’unico
modo per ispezionare “in vivo” la struttura dell’encefalo, è necessario avere una buona conoscenza
11
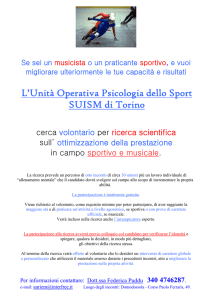
anatomica per raggiungere buoni risultati nella trattografia. In figura 2.6 si nota come con un
piccolo aumento della soglia minima si cancellino subito grandi zone affette da rumore, mentre con
valori superiori a 10 la zona visualizzata diminuisce di poco. Questo risultato ci fa comprendere
come l’algoritmo riesca ad essere molto efficace sulla trattazione del rumore: i fasci che prendono
strade errate (falsi positivi) si estinguono subito. Le problematiche dell’approccio deterministico
con i falsi positivi, i falsi negativi e le difficoltà nell’impostare i livelli di soglia rimangono però
anche in quello probabilistico nonostante le conclusioni risultino migliori. Allontanandosi dalla
ROI l’errore in ogni singolo passaggio di computazione si accumula generando scostamenti sempre
maggiori sulla ricostruzione dei fasci. Le considerazioni fatte fino a qui ci portano alla conclusione
che le mappe di probabilità, risultato dell’approccio probabilistico, vanno trattate con estrema
cautela.
12
(a) Soglia = 0
(b) Soglia = 1
(c) Soglia = 2
(d) Soglia = 4
(e) Soglia = 10
(f) Soglia = 20
(g) Soglia = 50
(h) Soglia = 100
(i) Soglia = 250
(j) Soglia = 500
Figura 2.6 Volontario A.B. : Trattografia corpo calloso con imaging a 64 direzioni di diffusione e
diversi livelli di soglia minima nel contrasto dell’immagine (il valore massimo è pari a
21681)
13
3 Risultati e Conclusioni
3.1 Apparato sperimentale
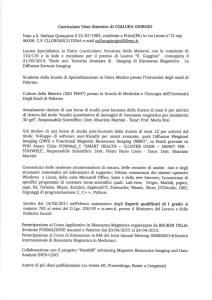
Tutte le immagini di RMN sono state acquisite presso l’Ospedale di Cattinara di Trieste. Il tomografo per MRI è un Philips Gyroscan Achieva che genera un campo magnetico B0 da 1.5 Tesla.
Il campo B0 viene prodotto tramite un magnete superconduttore costituito da spire immerse in
un bagno di elio liquido. Il paziente o volontario viene fatto sdraiare in posizione supina sul
lettino e successivamente inserito nella struttura cilindrica di diametro ø = 60 cm. L’inserimento
viene effettuato utilizzando un sistema laser in modo da posizionare la zona d’interesse (l’encefalo nel nostro caso) nel punto centrale del magnete in cui il campo magnetico è maggiormente
uniforme.
Figura 3.1 Tomografo Philips Achieva da 1.5 Tesla
Per produrre i gradienti di diffusione viene usato un sistema di bobine situate all’interno del
magnete principale. Con il sistema da noi utilizzato si possono generare gradienti lineari di
intensità fino a 33 mT/m e velocità di accensione (slew rate) oltre i 150 T sec/m. Per generare gli
impulsi a RF è stata utilizzata una Body Coil che, grazie alla sua geometria, ha la particolarità
di eccitare in maniera omogenea ampie zone del corpo. Per ricevere i segnali di rilassamento dei
14
nuclei si utilizza invece una Head Coil a 16 canali; questa si presenta come una maschera che
avvolge la testa e garantisce un’ottima omogeneità spaziale nella sensibilità di ricezione.
Tutta l’elettronica dei gradienti viene gestita in una sala attigua al tomografo, climatizzata
con sistema di raffreddamento ad acqua e sotto costante controllo della temperatura. Se nella
“sala gradienti” la temperatura sale oltre ad una determinata soglia, allora scatta un sistema di
sicurezza che blocca le scansioni di acquisizione delle immagini. Essendo state prese le misure
per questa tesi nella seconda metà del mese di agosto, abbiamo dovuto spesso ridurre il numero
di sequenze acquisite rispetto a quelle precedentemente previste a causa del surriscaldamento del
sistema, per sottodimensionamento del raffreddamento vista l’esposizione al sole della stanza. A
parziale spiegazione di questo problema c’e da dire che le sequenze del tipo utilizzato in questo
studio sono state introdotte in tempi recenti, ben dopo l’installazione iniziale.
(a) Head Coil
(b) Body Coil
Figura 3.2 Bobine di ricezione e trasmissione
3.2 Risultati
In questo lavoro di tesi mi propongo di studiare le differenze nel calcolo del tensore di diffusione
delle immagini acquisite con diverso numero di direzioni di gradiente. A questo scopo sono state
eseguite diverse sequenze per ogni volontario come riportato in tabella:
15
no di direzioni
Nome
6
32
64
A.B.
X
X
A.G.
X
X
X
X
X
X
X
X
X
X
D.Z.
E.B.
X
15
F.A.
I.S.
X
M.S.
X
X
X
R.B.
X
X
X
S.C.G.
X
X
X
128
X
X
In totale sono state effettuate 25 differenti sequenze in diffusione in aggiunta a quelle necessarie
alla determinazione del Field Of View (FOV), della giusta orientazione dello stesso e per le
immagini strutturali con contrasto determinato dal tempo di rilassamento T1 (T1-Weighted).
Tutti i volontari esaminati sono persone sane alle quali è stato fatto compilare il modulo di verifica
della compatibilità del soggetto con l’esame stesso e del consenso informato. Ogni sequenza DTI
ha diversi tempi di acquisizione in funzione della grandezza del FOV, della dimensione dei voxel,
ma soprattutto del numero di direzioni dei gradienti di diffusione applicati: nel conto dei benefici
dell’acquisizione a più gradienti bisogna quindi anche tenere conto di questo problema. Il numero
totale di immagini prodotte per ogni sequenza è pari al numero di fette studiate nell’encefalo
moltiplicato per il numero dei gradienti di diffusione più uno.
Una acquisizione a 6 direzioni di gradiente dura ' 2 min, quella a 15 direzioni ' 4 min, a 32
' 8 min, a 64 ' 16 min, mentre per 128 direzioni si sale fino a ' 25 min. Per scopi medici è
naturale quindi che, a meno di grosse migliorie nei risultati, non è possibile effettuare sui pazienti
acquisizioni che durano in totale più di un’ora tenendo conto della necessità di dover posizionare
il soggetto e di acquisire altre sequenze con fini clinici.
Una prima visualizzazione delle differenze che si hanno nell’utilizzo di un maggior numero di
direzioni di gradiente la si può avere osservando le immagini codificate a colori (vedi figura 2.4)
nei vari casi. Riporto di seguito le immagini relative alla stessa porzione di encefalo del volontario
E.B. con 6, 15 e 32 diverse direzioni di gradiente.
16
(a) Vista assiale
(b) Vista coronale
Figura 3.3 Volontario E.B. : immagine codificata a colori con 6 direzioni di gradiente. Rosso =
destra-sinistra, Verde = avanti-indietro, blu = alto-basso
(a) Vista assiale
(b) Vista coronale
Figura 3.4 Volontario E.B. : immagine codificata a colori con 15 direzioni di gradiente
17
(a) Vista assiale
(b) Vista coronale
Figura 3.5 Volontario E.B. : immagine codificata a colori con 32 direzioni di gradiente
Si può notare come ci sia un netto miglioramento nel passaggio da 6 a 15 direzioni di gradiente:
nella prima c’è una forte componente di rumore riconoscibile per le regioni colorate ad Arlecchino che non permette una buona visualizzazione dei principali fasci della materia bianca. A
questo punto è utile chiedersi il perchè del miglioramento nel calcolo del tensore di diffusione con
l’aumento del numero di direzioni. Il problema della ricerca di D lo si può paragonare al calcolo
del fit a retta per una serie di punti effetti da errori: risulta naturale che la retta si possa già
stimare con la misura di soli 2 punti, ma è altrettanto noto che l’errore sulla stima sarà maggiore
rispetto a quella di una retta stimata sulla base di più punti.
Riporto di seguito l’esempio del volontario D.Z. al quale sono state effettuate le misure con
15, 32, 64 e 128 direzioni.
18
(a) Vista assiale
(b) Vista coronale
Figura 3.6 Volontario D.Z. : immagine codificata a colori con 15 direzioni di gradiente
(a) Vista assiale
(b) Vista coronale
Figura 3.7 Volontario D.Z. : immagine codificata a colori con 32 direzioni di gradiente
19
(a) Vista assiale
(b) Vista coronale
Figura 3.8 Volontario D.Z. : immagine codificata a colori con 64 direzioni di gradiente
(a) Vista assiale
(b) Vista coronale
Figura 3.9 Volontario D.Z. : immagine codificata a colori con 128 direzioni di gradiente
Nell’immagine a 128 direzioni si possono notare molti più particolari rispetto all’immagine
della stessa zona dell’encefalo presa con 15 e 32 direzioni.
3.2.1 DTI Studio
DTI Studio [6] è un programma gratuito di image processing che lavora in ambiente Windows.
Può essere utilizzato per calcolare il tensore di diffusione, creare immagini codificate a colori,
20
FT con metodo deterministico FACT e visualizzazione 3D delle fibre. Il programma è stato
sviluppato dal Laboratory of Brain Anatomical MRI and Center for Imaging Science presso
la John Hopkins University a Baltimora nello stato del Maryland (USA). In questo lavoro di
tesi il programma è stato usato per studiare le caratteristiche dell’approccio deterministico al
FT. DTI Studio è molto semplice e intuitivo da utilizzare e simile al programma proprietario
della Philips presente presso l’Ospedale di Cattinara. Il formato delle immagini utilizzato dal
programma per l’analisi è lo stesso di quello prodotto dal programma Philips: Digital Imaging and
COmmunications in Medicine (DICOM). Lo standard DICOM [5] oltre a racchiudere l’immagine,
presenta anche un Header che contiene informazioni necessarie per lo studio della stessa.
Per caricare una serie di immagini in diffusione bisogna innanzitutto caricare una tabella detta
“tabella dei gradienti” che contiene le coordinate cartesiane dei versori paralleli alle direzioni dei
gradienti nel sistema di riferimento del tomografo. Questa tabella è stata ricavata dalle informazioni contenute negli header delle immagini, visti utilizzando il programma Osirix che lavora
in ambiente Apple. Altri parametri necessari come i b-value, le dimensioni del voxel e il numero
di slice assiali da analizzare vengono dichiarati in partenza dall’utente. Per il calcolo tensoriale
si definisce prima una soglia di background del rumore attraverso verifica visiva della qualità
dell’immagine in modo da rendere ottimale la prosecuzione dell’algoritmo. Il tempo necessario
per la valutazione del tensore voxel per voxel è di pochi secondi e permette la ricostruzione di
immagini pesate secondo la FA, la RA, i tre autovalori, mappe codificate a colori e altri indici ancora. La visualizzazione dell’encefalo in DTI Studio avviene attraverso tre immagini in proiezione
ortogonale ed una immagine tridimensionale triplanare. Dalle Color Maps si può innanzitutto
capire se la tabella dei gradienti è stata scritta in maniera corretta attraverso il confronto delle
immagini con le conoscenze anatomiche: la zona del corpo calloso deve risultare rossa (direzione
destra-sinistra), mentre quella del cortico spinale blu (alto-basso).
Dopo queste verifiche iniziali si può far partire l’algoritmo di Fiber Tracking deterministico
FACT a “forza bruta” tipico di DTI Studio. Il concetto di “forza bruta” [6] sta ad indicare il
fatto che il programma, invece di definire inizialmente una ROI da cui far partire l’algoritmo di
ricostruzione delle fibre, calcoli le fibre che passano per ogni voxel dell’immagine. Solo successivamente a questo calcolo si può definire una ROI che va ad identificare e di conseguenza visualizzare
tutte le fibre passanti per essa. Con questo metodo si riesce a computare anche fibre che nella
regione di interesse passano per lo stesso voxel, ma che una volta uscite da essa si dividono in più
fasci. Le soglie utilizzate per limitare la trattografia alla zona di interesse (materia bianca) e per
evitare il computo di casi falsi positivi (fibre che anatomicamente non esistono) sono state decise
utilizzando criteri standard per i metodi deterministici: F A < 0.25 ∧ ϑ < 70° . Il limite di 0.25
per la FA è paragonabile alla differenza di tale valore tra la materia grigia e la materia bianca,
inoltre il tensore D in questa zona è una quantità ben definita e l’indeterminazione sull’autovettore principale rimane accettabile. La soglia sull’angolo massimo tra le direzioni preferenziali in
due voxel attigui mi permette di non avere fibre che tornano su se stesse dopo piccoli tragitti e
di evitare i falsi positivi. In questo lavoro di tesi mi sono limitato a ricostruire solamente le fibre
passanti per il corpo calloso e per il cortico spinale con l’utilizzo di una singolaROI (quindi senza
operazioni logiche AND, OR e NOT necessarie per evitare falsi positivi) confrontando i risultati
con diversi numeri di gradienti.
21
Di seguito riporto una serie di figure tridimensionali di trattografia tramite DTI Studio per lo
stesso volontario con 6, 15 e 32 direzioni di diffusione.
Figura 3.10 Volontario E.B. : Trattografia corpo calloso con imaging a 6 direzioni di diffusione
Figura 3.11 Volontario E.B. : Trattografia cortico spinale con imaging a 6 direzioni di diffusione
22
Figura 3.12 Volontario E.B. : Trattografia corpo calloso con imaging a 15 direzioni di diffusione
Figura 3.13 Volontario E.B. : Trattografia cortico spinale con imaging a 15 direzioni di diffusione
23
Figura 3.14 Volontario E.B. : Trattografia corpo calloso con imaging a 32 direzioni di diffusione
Figura 3.15 Volontario E.B. : Trattografia cortico spinale con imaging a 32 direzioni di diffusione
24
Si può notare come nella ricostruzione delle fibre del corpo calloso solamente quella realizzata
avendo 32 direzioni di diffusioni di gradiente sia accettabile, mentre per la ricostruzione del
cortico spinale anche le immagini a 15 direzioni di diffusione riescono a dare un buon risultato,
che migliora notevolmente con il passaggio a 32 direzioni. Questo dato lo si può spiegare pensando
al fatto che il corpo calloso abbia una complessità dei fasci molto maggiore rispetto a quella del
cortico spinale dove, fino a pochi centimetri dalla materia grigia, continua senza cambiare la
direzione principale.
Di seguito riporto i risultati ottenuti per il volontario D.Z. con 15, 32 e 64 direzioni di diffusione.
Figura 3.16 Volontario D.Z. : Trattografia corpo calloso con imaging a 15 direzioni di diffusione
Figura 3.17 Volontario D.Z. : Trattografia cortico spinale con imaging a 15 direzioni di diffusione
25
Figura 3.18 Volontario D.Z. : Trattografia corpo calloso con imaging a 32 direzioni di diffusione
Figura 3.19 Volontario D.Z. : Trattografia cortico spinale con imaging a 32 direzioni di diffusione
Figura 3.20 Volontario D.Z. : Trattografia corpo calloso con imaging a 64 direzioni di diffusione
26
Figura 3.21 Volontario D.Z. : Trattografia cortico spinale con imaging a 64 direzioni di diffusione
3.2.2 FSL
FSL è un programma gratuito che contiene diversi strumenti di analisi di dati functionalMRI (fMRI), MRI e DTI e lavora in ambiente Apple o Linux. Questo programma è stato
sviluppato dall’FMRIB Analysis Group del Nuffield Department of Clinical Neurosciences presso
l’Università di Oxford. In questo lavoro di tesi il programma è stato utilizzato per studiare le
proprietà dell’approccio probabilistico [12] al FT e per determinare le mappe codificate a colori
utilizzate all’inizio di questo capitolo. Il formato delle immagini utilizzato dal programma per
l’analisi è il Neuroimaging Informatics Technology Initiative (NIfTI) [4], mentre come scritto
nel paragrafo precedente quello generato dall’apparecchio Philips è il formato DICOM. Per
risolvere questo problema è stato utilizzato il programma di conversione da file DICOM a NIfTI
“dcm2nii” [1]. Questo programma oltre a convertire il formato delle immagini genera anche due
file di tipo testo che FSL utilizza per caricare la tabella con i valori delle ampiezze e le direzioni dei
gradienti di diffusione che, diversamente dal programma DTI Studio, vengono prese nel sistema
di riferimento dell’encefalo del volontario.
L’algoritmo probabilistico [2] richiede un maggior numero di direzioni di diffusione per avere
una buona stima della distribuzione di probabilità ed è inoltre necessario che i dati raccolti presentino un buon rapporto segnale-rumore. Questo problema l’abbiamo riscontrato nelle immagini
prese con 6 direzioni di diffusione ed alcune con 15 direzioni dove l’algoritmo non è andato a
convergenza ad ha dato quindi errore. In un’altra sequenza a 32 direzioni di diffusione il programma ha dato errore: questo era dovuto ad errori nell’acquisizione delle immagini oppure dal
movimento della testa del volontario durante la presa dati. Si ha inoltre che per l’analisi dei
dati l’algoritmo richiede una grande quantità di calcoli che si traducono in una maggiore tempo
necessario per la computazione. Con un processore di 2 MHz per le immagini a 15 direzioni di
diffusione sono necessarie mediamente 6 h di calcolo, per le quelle a 32 direzioni 8 h, a 64 direzioni
13 h fino a passare a circa 20 h nelle immagini a 128 direzioni di diffusione. Questo può risultare
un problema se si utilizza questo metodo in ambito clinico dove ogni giorno ci sono numerosi
pazienti da trattare e se non si possiede un centro di calcolo per avere risultati in tempi brevi
sarebbe impossibile impiegare FSL per il FT. Riporto di seguito i risultati ottenuti sul volonta-
27
rio D.Z. con 15, 32, 64 e 128 direzioni di diffusione e livello di soglia minimo nel contrasto delle
immagini pari a 10.
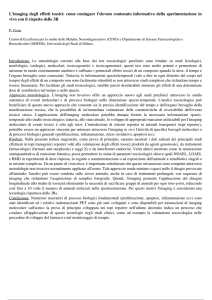
(a) Proiezioni ortogonali
(b) Ricostruzione tridimensionale
Figura 3.22 Volontario D.Z. : Trattografia corpo calloso con imaging a 15 direzioni di diffusione
(a) Proiezioni ortogonali
(b) Ricostruzione tridimensionale
Figura 3.23 Volontario D.Z. : Trattografia corpo calloso con imaging a 32 direzioni di diffusione
Si può notare come con l’aumentare del numero di direzioni dei gradienti di diffusione vi sia
un continuo miglioramento nei risultati finali. Per avere una migliore visualizzazione dei risultati
bisognerebbe avere la possibilità di muovere il cursore nelle immagini in proiezioni così da avere
un quadro complessivo delle fibre ricostrite. Per ovviare a questo problema ho inserito a fianco
delle immagini le ricostruzioni tridimensionali delle zone in cui sono presenti delle fibre, bisogna
però stare attenti che in queste immagini non vi è presente alcun fattore di contrasto e non è
quindi possibile discriminare le probabilità di esistenza dei fasci nelle varie zone.
28
(a) Proiezioni ortogonali
(b) Ricostruzione tridimensionale
Figura 3.24 Volontario D.Z. : Trattografia corpo calloso con imaging a 64 direzioni di diffusione
(a) Proiezioni ortogonali
(b) Ricostruzione tridimensionale
Figura 3.25 Volontario D.Z. : Trattografia corpo calloso con imaging a 128 direzioni di diffusione
29
3.3 Conclusioni
In questo lavoro di tesi sono stati utilizzati dati DTI, acquisiti su volontari sani, per studiare la
distribuzione dei fasci neuronali dell’encefalo con differenti. Tutto questo è stato fatto utilizzando
due programmi basati su diversi approcci alla teoria del tensore di diffusione: deterministico e
probabilistico.
L’approccio deterministico è caratterizzato dalla possibilità di dare buoni risultati anche in
studi DTI con basso rapporto segnale-rumore poichè acquisiti con con un numero minimo di
immagini sensibili agli effetti di diffusione. Il tempo di calcolo necessario alla ricostruzione dei
fibre è dell’ordine di qualche minuto, compatibile quindi con la routine clinica. La visualizzazione tridimensionale permette inoltre di comprendere facilmente le posizioni delle traiettorie
ricostruite. D’altro canto non è possibile dare un livello di confidenza alle fibre virtuali computate che a volte risultano prive di fondamento anatomico e per la natura dell’algoritmo le zone
a cui giungono le fibre si fermano ben prima della materia grigia. Il programma necessità così
conoscenze anatomiche indispensabili per un’attenta verifica dei risultati ed una bona riuscita di
questi ultimi.
L’approccio probabilistico richiede invece dati acquisiti con un elavato numero di immagini di
diffusione in modo da ottenere stime accurate del tensore di diffusione in ciascun punto e quindi
un calcolo accurato della distribuzione di probabilità di orientazione spaziale delle fibre presenti
nella regione. Nelle ricostruzioni dei fasci neuronali virtuali così ottenute i falsi positivi vengono
filtrati dalla soglia statistica applicata e non dipende in modo importante dalle conoscenze di
anatomia dell’operatore come nel caso del metodo deterministico. I tempi di presa dati e quelli di
calcolo sono però lunghi (fino a 20 h) e poco compatibili con la pratica clinica. La visualizzazione
dei risultati avviene attraverso mappe in proiezioni ortogonali con contrasto il numero di percorsi
passanti per ogni voxel. Le diverse modalità di rappresentazione dei risultati rendono poco
intuitivo il confronto delle ricostruzioni ottenute nei due casi. Da questa analisi però emerge che
per applicazioni cliniche di routine la tecniche probabilistica risulta di difficile applicazione (tempi
di acquisizione e di calcolo lunghi) anche se con tale approccio si “seguono” i fasci neuronali anche
in regioni prossime alla materia grigia sottocorticale dove la tecnica deterministica non riesce ad
arrivare.
30
Bibliografia
[1]
Center for Advanced Brain Imaging. Programma “dcm2nii”. url: http://www.cabiatl.
com/mricro/mricron/dcm2nii.html (cit. a p. 27).
[2]
T.E.J. Behrens et al. Characterization and Propegation of Uncertainty in Diffusion
Weighted MR images. 2004. url: http://www.fmrib.ox.ac.uk/analysis/techrep/
tr03tb1/tr03tb1/tr03tb1.html (cit. a p. 27).
[3]
Dundara D. “Immagini di Risonanza Magnetica Nucleare per Neuroimaging: ottimizzazione
ed integrazione di dati fMRI e DTI”. Tesi di Laurea Specialistica in Fisica. Università degli
Studi di Trieste, 2009 (cit. alle pp. 2, 5).
[4]
Data Format Working Group. Standard NIfTI. url: http://nifti.nimh.nih.gov/nifti1 (cit. a p. 27).
[5]
Medical Imaging e Technology Alliance. Standard Dicom. NEMA (cit. a p. 21).
[6]
H. Jiang et al. “DTIStudio: Resource program for diffusion tensor computation and fibre
bundle tracking”. In: Computer Methods and Programs in Biomedicine 81 (2006). A cura
di Elsevier, pp. 106–116 (cit. alle pp. 20, 21).
[7]
D.K. Jones, S. Williams e M.A. Horsfield. “Full representation of white-matter fibre direction on one map via diffusion tensor analysis”. In: Book of Abstracts: Fifth Annual Meeting
of the International Society of Magnetic Resonance in Medicine. A cura di ISMRM. 1997
(cit. a p. 9).
[8]
Jones D. K. “Studying connections in the living human brain with diffusion MRI”. In:
Cortex 44 (2008). A cura di Elsevier, pp. 936–952 (cit. a p. 5).
[9]
P. Mukherjee et al. “Diffusion Tension MR Imaging and Fiber Tractography: Theoretic
Underpinnings”. In: Am. J. Neuroradiol. 29 (2008). A cura di AJNR, p. 632 (cit. alle pp. 6,
7).
[10]
S. Pajevic e C. Pierpaoli. “Colour schemes to represent the orientation of anisotropic tissues
from diffusion tensor data: applications to white matter fiber tract mapping in th ehuman
brain”. In: Magnetic Resonance in Medicine 43 (1999), pp. 526–540 (cit. a p. 9).
[11]
C. Pierpaoli. “Oh no! One more method for colour mapping of fiber tract direction using diffusion MR imaging data”. In: Book of Abstracts: Fifth Annual Meeting of the International
Society of Magnetic Resonance in Medicine. A cura di ISMRM. 1997 (cit. a p. 9).
[12]
A.C. Riggall, K. Doron e M.S. Steven. Diffusion Tensor Imaging Analysis Guide. Dartmouth College, Gazzaniga Laboratory. 2006. url: http://dbic.dartmouth.edu/dti/
DTIGuide.pdf (cit. a p. 27).
31
[13]
Santarelli X. “Misure “in vivo” del Tensore di Diffusione con tomografia di Risonanza Magnetica Nucleare”. Tesi di Laurea Specialistica in Fisica. Università degli Studi di Trieste,
2007 (cit. a p. 5).
32
Acronimi
AC
Attenuation Coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
ADC
Apparent Diffusion Coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
DICOM
Digital Imaging and COmmunications in Medicine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
DSI
Diffusion Spectrum Imaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
DTI
Diffusion Tensor Imaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
DW
Diffusion Weighted . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
FA
Fractional Anisotropy. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
FACT
Fiber Assignment by Continuous Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
fMRI
functional-MRI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
FOV
Field Of View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
FT
Fiber Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
HARDI
High Angular Resolution Diffusion Imaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
MRI
Magnetic Resonance Imaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
NIfTI
Neuroimaging Informatics Technology Initiative. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
NMR
Nuclear Magnetic Resonance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1
RA
Relative Anisotropy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
RF
Radio Frequenza. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3
RMN
Risonanza Magnetica Nucleare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
ROI
Region Of Interest . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
SE
Spin-Echo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
33