ATTUATORI ELETTRICI
0.1
Sommario
1
ATTUATORI ELETTRICI............................................................................2
1.1
Gli attuatori.......................................................................................2
1.2
Motore in corrente continua ............................................................2
1.3
Azionamento dei motori in corrente continua.................................3
1.3.1
Azionamento lineare....................................................................4
1.3.2
Azionamento impulsivo (PWM) ..................................................5
1.3.3
Ponti .............................................................................................6
1.4
Motore passo-passo........................................................................7
1.4.1
Principio di funzionamento ..........................................................8
1.4.2
Pilotaggio del motore passo-passo ..........................................10
1.4.3
Parametri fondamentali dei motori passo-passo .....................12
1.5
Motore asincrono...........................................................................12
1.5.1
Cenni preliminari........................................................................12
1.5.2
I convertitori di frequenza ..........................................................12
1.6
Motore brushless ...........................................................................13
1.7
Dispositivi elettronici commerciali per gli azionamenti elettrici ....14
1.7.1
Il dual full-bridge driver L298 .....................................................14
1.7.2
Il stepper motor controller L297 ................................................14
1.8
Domande .......................................................................................16
1.9
Esercizi...........................................................................................16
1.10
Laboratorio.....................................................................................17
1.10.1
Rilievo delle caratteristiche statiche di un motore in c.c. a magneti permanenti 17
1.10.2
Comando lineare di velocità di un motore in c.c. a magneti permanenti 18
1.10.3
Comando PWM di velocità di un motore in c.c. a magneti permanenti 19
1.10.4
Azionamento di un motore passo-passo mediante controller L297 e driver L298
20
0.1
ATTUATORI ELETTRICI
0.1
Prerequisiti
Conoscere i dispositivi elettronici fondamentali. Conoscere i principi dell'elettromagnetismo.
Obiettivi specifici
Saper classificare gli attuatori. Conoscere i principali tipi di attuatori elettrici ed i loro campi applicativi.
Con il termine attuatore si intendono quel dispositivo in grado di convertire il segnale elettrico emesso da un controllore in un
movimento meccanico. Si possono distinguere diverse categorie di attuatori, in particolare essi possono essere di tipo:
-
elettrico
-
pneumatico
-
oleodinamico
Esempi di attuatori elettrici sono gli elettromagneti ed i servo-motori.
Gli elettromagneti, attraverso l’eccitazione di una bobina provocano lo spostamento di un nucleo e , conseguentemente
delle parti meccaniche ad esso connesse. Il loro impiego è molto diffuso: vengono usati nelle serrature elettriche e nelle
elettrovalvole, azionano i martelletti delle stampanti, ecc.
I servo-motori sono impegati nei servosistemi. Il loro campo di impiego è vastissimo, dall’avanzamento dei carrelli nelle
macchine utensili al posizionamento di diverse parti nelle autovetture (finsetrini, tergicristalli, ecc.), dal trascinamento del
nastro e della carta nelle stampanti alla movimentazione dei computer. I motori usati nei servosistemi sono normalmente:
-
motori in corrente continua
-
motori brushless
-
motori passo-passo
-
motori ad induzione controllati elettronicamente mediante appositi azionamenti (inverter).
I sistemi di comando e regolazione dei servomotori sono denominati azionamenti.
I motori in corrente continua, ed in particolare quelli a magneti permanenti, trovano applicazione come attuatori nei servo
sistemi grazie alla loro caratteristica di poter essere regolati in velocità in modo relativamente semplice ed economico.
I motori a corrente continua utilzzati nel campo dei controlli sono quelli ad eccitazione indipendente, sovente del tipo a
magnete permanente, di potenza inferiore al kW.
0.1
ATTUATORI ELETTRICI
0.1
• Figura 1 - Motori in c.c. a magneti permanenti per sviluppo e didattica
Un motore in corrente continua ad eccitazione indipendente è schematizzato nella figura seguente:
• Figura 2 - Modello elettromeccanico di un motore in c.c. ad eccitazione indipendente
Nella figura precedente si possono distinguere il circuito di armatura a cui è applicata la tensione di armatura Va, il circuito di
eccitazione, responsabile della generazione del campo magnetico, a cui è applicata la tensione di eccitazione Ve e la parte
meccanica, nella quale entrano in gioco la coppia motrice Cm, prodotta dal motore che deve vincere la coppia resistente Cr
ed il momento di inerzia Jc.
I motori in corrente continua ad eccitazione indipendente vengono pilotati agendo sulla tensione del circuito d'armatura.
Il modo più semplice di comandare elettronicamente un motore in corrente continua consiste nell’impiegare un transistore
funzionante come interruttore e di metterlo in serie al circuito di armatura del motore stesso, come è illustrato nella seguente
immagine.
0.1
ATTUATORI ELETTRICI
0.1
• Figura 3 - Comando ON-OFF di un motore in c.c.
Quando il BJT si trova nello stato ON sul motore è applicata una tensione di armatura pari a Va = VCC − VCEsat che ne
provoca la rotazione, mentre nello stato OFF la corrente non scorre più attraverso il transistor ed il motore cessa di essere
alimentato.
Il diodo D1 di circolazione, posto in antiparallelo al motore, riduce le sovratensioni ai capi del transistor, provocate nella
commutazione ON→OFF dalla componente induttiva del motore.
In questo modo non è però possibile regolare la velocità di rotazione del motore. Per fare ciò sono possibili essenzialmente
due tecniche di azionamento: lineare ed impulsiva.
Nella figura seguente è rappresentato un semplice schema adatto a regolare linearmente la velocità di rotazione mediante
una configurazione ad inseguitore di emettitore
• Figura 4 - Comando lineare di un motore c.c.
La tensione di ingresso Vi, regolata tramite il potenziometro, viene trasferita sull’armatura del motore, a meno della VBE del
transistor, controllandone così la velocità di rotazione.
Per ridurre la corrente di base, spesso si sostituisce al semplice BJT uno in configurazione Darlington, come si può vedere
in figura.
Esempio.
Un piccolo motore in c.c. assorbe sotto carico la corrente Ia = 700mA. Usando lo schema di controllo lineare riportato nella
figura precedente, con VCC = 12V, si determinino la potenza PA assorbita dal motore e la potenza PD dissipata dal transistor
quando il cursore del potenziometro si trova a metà corsa, ossia quando VB = 0,5⋅VCC. Si ricavi inoltre la corrente richiesta
dalla base, sapendo che hFE = 50.
0.1
ATTUATORI ELETTRICI
0.1
! " #$%
&
Un inconveniente del controllo di velocità lineare consiste nel fatto che il transistor che pilota il motore è chiamato a dissipare
una notevole potenza (PT), soprattutto alle basse velocità. In questo modo il rendimento ρ dell’azionamento, dato dal
rapporto tra la potenza elettrica PA assorbita dal motore e la potenza PCC assorbita dall’alimentazione, è piuttosto basso.
ρ=
PA
PA
=
PCC PA + PT
Questo inconveniente viene superato facendo lavorare il transistore in regime impulsivo, ovvero in commutazione. In questo
caso la dissipazione di potenza dovuta al transistor avviene solo quando il transistor è in saturazione o quando il transistor è
in commutazione.
Nel primo caso la potenza è bassa perché la differenza di potenziale ai capi del transistor è molto piccola (VCEsat ≅
0,1÷0,2V). Nel secondo caso la potenza dissipata è bassa perché il fenomeno dura molto poco temporalmente.
Per questo motivo nel controllo dei motori si tende ad utilizzare la tecnica della modulazione a larghezza di impulso
(PWM: pulse width modulation). Il motore in corrente continua viene alimentato con una tensione di armatura di andamento
rettangolare con ampiezza VaM e periodo T costanti ma con ciclo utile δ variabile.
Si rammenta che il ciclo utile δ di una forma d’onda rettangolare è definito con il seguente rapporto:
δ =
TH
⋅ 100
T
Esso è un valore adimensionale ed è espresso in valore percentuale.
TH
TH
VaM
Vam
Vam
T
T
• Figura 5 - Modulazione a larghezza di impulso
La frequenza della tensione di armatura viene scelta da qualche kHz in su, preferibilmente intorno ai 20 kHz, in modo da
evitare la generazione e diffusione di rumore nella gamma delle frequenze udibili.
In realtà il motore, sia per la coppia resa che per la velocità, sente sostanzialmente il valore medio Vam della tensione di
armatura, che a sua volta dipende dal duty cicle
Vam =
TH
⋅ VaM = δ ⋅ VaM
T
Da un punto di vista sistemico ciò si giustifica con il fatto che , dal punto di vista della velocità, il polo dominante, e quindi la
frequenza di taglio, della funzione di trasferimento del motore dipendono sostanzialmente dalla costante tempo meccanica
del motore ( p =
1
τ Mecc
); mentre , dal punto di vista della coppia resa, e quindi della corrente di armatura, il polo dominante
della funzione di trasferimento dipende dalla costante tempo elettrica del motore ( p =
1
τ El
) che è meno elevata della
costante meccanica; Poiché in entrambi i casi le costanti tempo sono piuttosto elevate rispetto al periodo T del tensione di
armatura ciò che “passa” della tensione di armatura è solo il valore medio.
La seguente figura rappresenta un esempio di azionamento PWM.
0.1
ATTUATORI ELETTRICI
0.1
• Figura 6 - Azionamento PWM
Il circuito di controllo mediante il classico 555 è un generatore di onda quadra a frequenza fissa e duty cicle variabile. In
questo caso il BJT viene fatto funzionare come interruttore. Regolando il potenziometro P1 si varia il duty cicle della
tensione Va, e quindi il suo valore medio.
Il periodo vale:
T = 0.69 ⋅ C ⋅ (2 R + RP ) dove R = R1 = R 2
$
Finora non ci si è preoccupati di invertire il senso di rotazione del motore. Nel caso di un motore in corrente continua a
magneti permanenti occorre invertire la polarità della tensione di armatura. Per fare ciò si utilizzano le configurazioni a
semiponte e ponte intero.
Semiponte
Uno schema frequentemente utilizzato è quello riportato in figura. Esso è denominato a semiponte o a T e necessita di
doppia alimentazione.
• Figura 7 - Ponte a T
Con T1 ON e T2 OFF la corrente scorre attraverso T1 nel verso indicato a tratto pieno ed il motore gira in un verso. Con T1
OFF e T2 ON la corrente scorre nel verso indicato con tratto tratteggiato passando per T2 ed il motore gira nel verso
opposto.
'
0.1
ATTUATORI ELETTRICI
0.1
I diodi D1 e D2 proteggono i transistori dalle sovratensioni dovute alla componente induttiva del motore, durante la
commutazione ON → OFF dei BJT.
Ponte intero
Nella seguente figura è riportata la configurazione a ponte intero, detta anche ad “H” per la sua caratteristica forma.
• Figura 8 – Ponte ad H
Essa, rispetto alla precedente configurazione, presenta il vantaggio di utilizzare una alimentazione singola. Quando T2 e T3
sono interdetti e T1 e T4 sono saturi la corrente scorre nel verso indicato dalla linea con tratto pieno. Mentre quando T2 e
T3 sono saturi e T1 e T4 sono interdetti la corrente scorre nel verso indicato dalla linea tratteggiata.
I diodi sono disposti sempre allo scopo di proteggere i transistor da sovratensioni quando essi commutano da ON ad OFF.
!! )
!!
Il motore passo-passo (stepper motor) è un attuatore che ruota di un angolo fisso γ , chiamato passo, ad ogni
commutazione dei segnali di comando digitali.
La posizione angolare dell’albero dipende esattamente dal numero di passi effettuati. A causa di questa caratteristica
peculiare il motore passo-passo viene utilizzato nei posizionamenti di precisione e nei sistemi di controllo ad anello aperto,
ovvero senza anello di reazione.
• Figura 9 - Motore passo-passo a magneti permanenti
Un altro vantaggio di questo tipo di motori risiede nella maggiore robustezza non avendo parti soggette ad usura, come le
spazzole nel caso dei motori in c.c.. Inoltre, se necessario, possono essere realizzati in in esecuzione completamente
stagna.
Gli svantaggi risiedono in una maggiore complessità dei circuiti di azionamento e da un rapporto potenza/volume più
sfavorevole.
I motori passo-passo si ritrovano spesso negli apparati elettronici medio-piccoli (stampanti, plotter, unità disco) e
nell’azionamento di robot.
(
0.1
ATTUATORI ELETTRICI
$
0.1
+
I motori passo-passo, a differenza di tutti gli altri , hannola caratteristica fondamentale di mantenere fermo l'albero in una
ben precisa posizione quando sono alimentati. La rotazione viene ottenuta indirettamente inviando al motore una serie di
impulsi di corrente, secondo una opportuna sequenza, in modo da far spostare a scatti la posizione di equilibrio.
I motori passo-passo si suddividono da un punto di vista costruttivo in :
-
motori a magnete permanente (PM)
-
motori a riluttanza variabile (VR)
-
motori ibridi (HY)
La gran parte dei motori passo-passo oggi reperibili appartiene all'ultima categoria.
Un motore ibrido, come la quasi totalità dei motori, è costituito da un rotore e da uno statore, come si può vedere nella
seguente figura.
Il rotore appare come una coppia di ruote dentate affiancate e solidali all'albero (I "denti" sono denominati anche coppette)
costituite da un nucleo magnetico e dai denti in materiale ferromagnetico. Pertanto esse sono permanentemente
magnetizzate e presentano un nord ed un sud. Il numero di denti è variabile ma il valore più frequente è 50. Tra le due ruote
è presente uno sfasamento di pari a mezzo passo di dente.
Lo statore appare come il classico insieme di avvolgimenti. Sono presenti quattro o più frequentemente otto espansioni
polari. Sulle espansioni polari sono ricavati piccoli denti che si affacciano a quelli presenti nel rotore. Avvolti attorno ai poli ci
sono i fili che opportunamente percorsi da corrente generano il campo magnetico.
• Figura 10 - Statore e rotore di un motore ibrido.
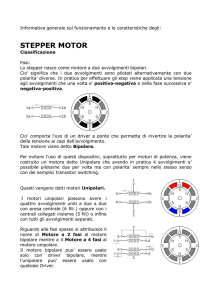
Questa tipologia di motori passo-passo può essere bipolare od unipolare a seconda del tipo di alimentazione degli
avvolgimenti.
Motori bipolari
Nello statore sono presenti due avvolgimenti, facenti capo rispettivamente alle coppie di terminali A-B e C-D. Questi
avvolgimenti possono essere percorsi dalla corrente nei due sensi. Il rotore è costituito come abbiamo visto da un magnete
permanente.
*
0.1
ATTUATORI ELETTRICI
0.1
.
-
• Figura 11 - Motore bipolare
Motori unipolari
Rispetto ai motori bipolari gli avvolgimenti vengono percorsi dalla corrente in un solo verso. Lo statore quindi contiene
quattro avvolgimenti, e non due come nel caso degli unipolari, avvolti in coppia sulle espansioni polari dello statore; per
questo motivo devono essere realizzati con filo più sottile.
Motori bipolari-unipolari
Una tipologia particolare di motore passo-passo è utilizzabile sia in configurazione unipolare che bipolare: si tratta di quelli a
6 fili. Nella figura seguente questo tipo di motore è schematizzato con i quattro induttori racchiusi nel rettangolo tratteggiato,
senza indicare esplicitamente anche la resistenza equivalente, comunque presente
• Figura 12 - Avvolgimentidel motore bipolare-unipolare.
I due avvolgimenti Ph1 e Ph2 sono avvolti sullo stesso nucleo in modo tale che la corrente entrante dal terminale 1 crea due
campi magnetici opposti a seconda che il terminale di uscita sia A oppure B. In questo caso abbiamo uno schema
equivalente ad un motore unipolare.
Se invece la corrente entra da A ed esce da B si crea un campo magnetico opposto al caso in cui la corrente entra da B ed
esce da A; in questo caso, dal terminale 1 non passa corrente ed abbiamo un funzionamento come motore bipolare (ed
infatti sono usati solo 4 fili: i terminali 1 e 2 non devono essere connessi).
La stessa cosa succede per Ph3 e Ph4. Analoghe considerazioni possono essere fatte per i rari motori a 8 fili.
Per distinguere i due tipi di motore, per i quali sono richieste tecniche di pilotaggio molto diverse, basta ovviamente contare i
fili uscenti: se sono 4 abbiamo un motore bipolare, se sono 5 un unipolare, se sono 6 o 8 possiamo scegliere il tipo di
pilotaggio più opportuno.
,
0.1
ATTUATORI ELETTRICI
$
00
0.1
!! )
!!
Per il funzionamento del motore passo-passo è necessario applicare degli impulsi di corrente ai vari avvolgimenti
rispettando una opportuna sequenza e verso. Questo può essere fatto mediante degli interruttori elettronici come i
transistor. Per ciascun tipo di motore, unipolare o bipolare, esiste uno specifico schema di funzionamento.
Pilotaggio dei motori unipolari
I motori unipolari sono i più facili da pilotare. Infatti è sufficiente usare quattro interruttori, uno per per fase. Il fatto di avere
quattro avvolgimenti lo rende però un motore con scarso rapporto peso/potenza e quindi adatto alle applicazioni più
semplici. Come già accennato, le fasi sono in parte internamente collegate. Nello schema seguente è rappresentato il
collegamento elettrico di un motore unipolare a sei fili.
• Figura 13 - Pilotaggio di un motore unipolare mediante quattro interruttori.
Senza alimentazione il motore ruota liberamente , anche se provando a far girare l'albero a mano, si sente un certo
funzionamento a scatti.
Facendo passare corrente in una sola delle fasi il motore rimane bloccato in una posizione di equilibrio. La rotazione è
ottenuta cambiando mediante una opportuna sequenza la fase a cui la corrente è applicata. La squenza con cui la corrente
è applicata può essere di vari tipi.
-
One phase on
-
Two phase on
-
Half step senza controllo di coppia
Pilotaggio dei motori bipolari
I motori bipolari hanno solo quattro fili di connessione e due sole fasi. Per questi motori il pilotaggio è più complesso che per
quelli unipolari; infatti la corrente deve attraversare gli avvolgimenti nei due versi e questo rende più complesso il circuito di
pilotaggio. Il vantaggio risiede nel fatto che essendoci due soli avvolgimenti a parità di peso e dimensioni la potenza del
motore è maggiore.
/
0.1
ATTUATORI ELETTRICI
0.1
• Figura 14 - Pilotaggio di un motore bipolare mediante due circuiti a ponte H.
Anche nel pilotaggio bipolare sono possibili diverse modalità.
-
One phase on
-
Two phase on
-
Half step senza controllo di coppia
-
Half step con controllo di coppia
-
Microstepping
La regolazione PWM della corrente
Il metodo più semplice per pilotare un motore passo-passo consiste nell’applicare la tensione di alimentazione nominale Va
alle varie fasi, secondo una sequenza desiderata. Con questo metodo, denominato pilotaggio in tensione, la corrente (e
pertanto anche la coppia) arriva ad ogni fase dopo un transitorio dipendente dall’induttanza L e dalla resistenza R della fase.
Se si pone di avere R=10Ω ed L=4mH si ha che la corrente arriva al suo valore nominale dopo un tempo 5⋅τ=L/R=2 ms.
Pertanto le fasi dovranno commutare con frequenza sicuramente inferiore ai 500 Hz.
Per ovviare a questo inconveniente si utilizzano diverse tecniche anche molto sofisticate. Una delle tecniche più utilizzate è
denominata pilotaggio chopper o switching , a seconda della frequenza di pilotaggio. La fase viene sovraeccitata con una
tensione Va molto elevata; quando la corrente arriva, rapidamente, al suo valore nominale, l’alimentazione della fase viene
interrotta. L’induttanza tende allora a scaricarsi attraverso il diodo di ricircolo e la corrente così diminuisce. Quando la
corrente raggiunge un prefissato valore di soglia, la fase viene di nuovo alimentata. La corrente rimane così pressochè
costante pur mantenendo un caratteristico andamento a dente di sega, illustrato in figura.
0.1
ATTUATORI ELETTRICI
0.1
Inom
t
• Figura 15 - Pilotaggio switching
$
+
!! )
!!
La scelta di un motore passo-passo avviene sulla base delle prestazioni che deve garantire all'interno di un sistema di
controllo. A questo scopo si fa riferimento ad alcuni parametri fondamentali che vengono forniti dal costruttore:
-
La coppia motrice nominale; essa indica il massimo carico, espresso normalmente in N·cm, che il motore è in grado
di sopportare senza perdere passi.
-
La rotazione angolare per passo; essa è il più piccolo spostamento angolare dell'albero, espresso in gradi, quando il
motore avanza di un passo. I valori più comuni sono 1,8°, 3,75°, 7,5°, 9°, 15°.
-
La frequenza di passo; essa indica il numero massimo di passi che il motore può effettuare in un secondo. Essa è un
indice della massima velocità di rotazione raggiungibile dal motore e può arrivare fino ad oltre 800 passi al secondo.
!
In questa sede non è possibile offrire una visione approfondita di tutte le problematiche attinenti a questo tipo di motori
estremamente diffuso, ma si focalizzerà l’attenzione su quegli aspetti più direttamente legati alla regolazione di velocità degli
stessi.
Il motore asincrono è di gran lunga il motore più diffuso a livello di applicazioni industriali convenzionali a causa della sua
semplicità costruttiva, l’intrinseca robustezza, la scarsa manutenzione e l’economicità.
D’altro canto, mentre i motori in corrente continua sono facilmente regolabili in velocità, quelli asincroni non lo sono
altrettanto. Il motore asincrono è un motore a velocità sostanzialmente costante, prossima a quella del campo rotante n0, il
cui valore è determinato solo dal rapporto tra la frequenza di alimentazione f e il numero delle coppie di poli p presenti
nell’avvolgimento di statore.
n 0 = 60 ⋅
f
p
(rpm)
Ciò comporta che per variare la velocità con continuità occorre variare corrispondentemente la frequenza di alimentazione.
La sola variazione della frequenza porterebbe però ad una alterazione del punto di lavoro del circuito magnetico del motore
e con esso delle caratteristiche del motore stesso. Pertanto se si riduce la frequenza occorre ridurre proporzionalmente la
tensione di alimentazione per non incorrere nella saturazione magnetica, mentre se si aumenta la frequenza bisogna
aumentare corrispondentemente la tensione di alimentazione. Non addentrandoci troppo nei particolari si può affermare che
la regolazione di velocità di un motore asincrono va effettuata con una caratteristica V/f costante.
"
+ 1
I dispositivi adibiti alla alimentazione e regolazione della velocità dei motori asincroni prendono il nome di convertitori di
frequenza. L’uscita di un convertitore deve essere regolabile in frequenza e tensione. Lo schema di principio prevede
sostamzialmente due stadi in cascata: il primo converte la tensione alternata di rete (monofase o trifase) in tensione
continua (conversione AC/DC) ed il secondo effettua la riconversione da tensione da continua ad alternata (conversione
DC/AC) a tensione e frequenza variabile.
0.1
ATTUATORI ELETTRICI
CONV. AC/DC
0.1
FILTRO
CONV. DC/AC
Optoisolatori
Opto
Isol.
Controllore
UNITA’ DI
CONTROLLO
• Figura 16 - SChema di principio di un converitore di frequenza
Tra i due blocchi vi è un filtro. Il convertitore di frequenza viene spesso denominato inverter anche se tale dicitura in realtà si
riferirebbe al solo convertitore DC/AC.
Il convertitore AC/DC, nel caso della figura, è realizzato mediante un ponte totalmente controllato che utilizza sei tiristori,
mentre per la conversione DC/AC si utilizza una configurazione a ponte mediante transistori.
'
2 !3 !!
I motori brushless sono sostanzialmente dei motori in corrente continua senza spazzole. Il rotore è costituito da un magnete
permanente e nello statore sono insediati gli avvolgimenti. Questi motori eliminano gli inconvenienti a cui sono soggetti i
servomotori tradizionali in corrente continua a collettore. Infatti questi motori non sono soggetti all'usura delle spazzole e del
collettore e non producono radiodisturbi a causa delle scintille.
In un certo senso, il commutatore meccanico viene sostituito da un commutatore elettronico, più complesso e costoso ma
più affidabile.
• Figura 17 - Motori brushless.
I motori brushless vengono comandati secondo la tecnica trapezoidale (brushless dc motor) o quella sinusoidale (brushless
ac synchronous motor).
0.1
ATTUATORI ELETTRICI
(
0.1
.! ! "
(
+ )2
0
0
"
,*
La ST-Microelettronics, una delle più grandi ditte produttrici di componenti elettronici, già da diversi anni ha introdotto sul
mercato alcuni circuiti integrati dedicati al pilotaggio di motori elettrici. Tra i vari integrati a disposizione uno dei più conosciuti
è l’integrato L298.
L’integrato L298, come si può desumere dal diagramma a blocchi, è un circuito monolitico che implementa due ponti
completi da 2 A, ciascuno, che supportano una tensione massima VSS = 48V. Essi sono in grado di pilotare (driver) carichi
induttivi come relé , solenoidi, motori in corrente continua e motori passo-passo (OUT1, OUT2, OUT3, OUT4). Il driver L298
accetta in ingresso segnali TTL compatibili (In1, In2, In3, In4, EnA, EnB).
• Figura 18 - Diagramma a blocchi del L298
L’ntegrato dispone di due alimentazioni separate, +Vs per i ponti e +Vss per le porte logiche interne. Gli emettitori dei
transistori “bassi” di ciascun ponte sono connessi insieme e disponibili all’esterno mediante i piedini SENSE A e SENSE B;
ad essi vanno connessi due resistori che svolgono la funzione di “current sensing”,ovvero ai loro capi si genera una
tensione proporzionale alla corrente assorbita dai ponti. Questa tensione è utilizzata dal controllore a monte del L298 per
interrompere il ponte quando la corrente supera una soglia predeterminata (pilotaggio chopper o switching).
L’integrato si presenta in contenitori (package) tipo Multiwatt15, per il montaggio tradizionale, e PowerSO20, per il
montaggio superficiale SMT. Nel caso del contenitore Multiwatt15 si può applicare alla parte metallica del contenitore delle
alette di raffreddamento per favorire la dissipazione del calore prodotto durante il funzionamento.
• Figura 19 - Packages Multiwatt15 e PowerSO20
(
!
,(
L’integrato L297, prodotto dalla ST-Microelectronics, è un controllore per motori passo-passo in grado di generare quattro
segnali di fase per motori passo-passo bipolari ed unipolari. Con esso si possono implementare sia il pilotaggio a passo
intero che quello a mezzo passo.
0.1
ATTUATORI ELETTRICI
0.1
• Figura 20 – Pinout e diagramma a blocchi del L297
0.1
ATTUATORI ELETTRICI
*
0.1
.
1.
Dare una definizione di attuatore (max. tre righe).
2.
Nel comando di velocità lineare, a parità di coppia motrice sviluppata dal motore, la potenza dissipata dall’elemento
attivo di regolazione:
3.
[a]
Diminuisce al crescere dellla velocità.
[b]
Cresce al crescere della velocità
[c]
Non dipende dalla velocità
[d]
Dipende unicamente dal tipo di elemento attivo
Nel comando di velocità PWM la velocità del motore c.c. è direttamente proporzionale:
[a]
Alla frequenza di commutazione del segnale di comando
[b]
Al periodo del segnale di comando
[c]
Al duty cicle del segnale di comando
[d]
Alla frequenza della alimentazione.
4.
Qual è la funzione svolta dal diodo che viene normalmente posto in parallelo al motore in c.c.? (max. tre righe).
5.
Che cosa è un inverter?
6.
[a]
Un sistema di comando e regolazione di un motore a.c..
[b]
Un sistema di comando e regolazione di un motore c.c.
[c]
Un sistema di inversione del verso di rotazione di un motore c.c.
[d]
Un sistema di alimentazione duale per motori a.c.
La velocità di rotazione di un motore in c.c. a magneti permanenti , a parità di coppia, viene variata agendo su:
7.
[a]
La corrente del circuito di eccitazione.
[b]
La corrente del circuito di armatura
[c]
La tensione del circuito di eccitazione
[d]
Sul periodo della tensione del circuito di armatura
Per quale ragione può essere preferibile il pilotaggio di un motore passo-passo a due fasi alla volta anziché a una fase
alla volta?
,
!
1.
Disegnare il circuito di comando ON-OFF di un motore c.c. a magneti permanenti mediante BJT.
2.
Disegnare il circuito di comando lineare di un motore in c.c. a magneti permanenti mediante BJT.
3.
Disegnare l’andamento temporale della tensione di alimentazione di un carico induttivo comandato in PWM alla
frequenza di 20kHz e con duty cicle pari al 60%.
4.
Disegnare il circuito di comando a ponte di un motore in c.c. a magneti permanenti mediante BJT.
5.
Disegnare i due circuiti base di pilotaggio dei motori passo-passo unipolare e bipolare, riportando per ognuno un
esempio di sequenza di pilotaggio.
'
0.1
ATTUATORI ELETTRICI
/
0.1
2
/
"
!
3 !
3
0
Schema elettrico
+
A
+
A
B
Z
V
E
Obiettivo della prova
-
Essere in grado di determinare la velocità angolare di un motore elettrico mediante l'analisi dei segnali prodotti da un
encoder incrementale.
-
Conoscere e saper commentare le caratteristiche tensione di armatura - velocità angolare e tensione di armatura corrente di armatura di un motore in corrente continua.
Strumenti ed attrezzature
•
Alimentazione in c.c. variabile 0÷50V
•
Alimentazione c.c. 12÷15V
•
Oscilloscopio digitale
•
Motore elettrico in corrente continua.
•
Encoder incrementale
Procedimento
•
Si monta il circuito come in figura.
•
Si applichi in modo graduale una tensione crescente al circuito di armatura del motore in corrente continua.
•
Per ogni valore della tensione di armatura si rilevi la corrente di armatura assorbita dal motore e la velocità angolare
del motore mediante l'interpretazione dei segnali A, B e Z in uscita dall'encoder incrementale.
•
Si riporti quanto rilevato in due grafici separati.
•
Redigere una relazione della prova secondo lo schema di principio ordinario. Nelle conclusioni si abbia cura di
dimostrare di aver raggiunto l'obiettivo della prova e di aver ottenuto risposta alle seguenti domande.
Domande
-
Cosa succede se si inverte la polarità della tensione di armatura ?
(
0.1
ATTUATORI ELETTRICI
0.1
/
"
4
0
Schema elettrico
Vi
n
IE
VE
VEN
U1
U2
Uz
Strumentazione ed attrezzatura
-
Voltmetro
-
Amperometro
-
Encoder incrementale
-
Oscilloscopio
-
Frequenziometro/counter
Componenti
-
Motore elettrico in c.c. 3-30W
-
Transistor Darlington BDX53
-
Potenziometro 10÷47kΩ
-
Resistenza 100Ω
Procedimento
1.
Realizzare il regolatore di velocità lineare riportato in figura
2.
Collegare l’uscita U1 dell’encoder ad un frequenzimetro o all’oscilloscopio
3.
Per diversi valori di Vi misurare VE, IE ed n compilando una apposita tabella
Osservazioni
Il transistor quando opera in zona attiva dissipa una parte consistente della potenza in gioco, pertanto deve essere dotato di
apposito dissipatore.
*
0.1
ATTUATORI ELETTRICI
/
0.1
$%
"
4
0
Schema elettrico
IA
vA
Strumentazione ed attrezzatura
-
Oscilloscopio digitale
-
Alimentatore 0 ÷ 15V DC
Componenti
-
Motore elettrico in c.c. 3-30W
-
Transistor Darlington BDX53 o equivalente
-
Timer 555
-
Ecc.
Procedimento
1.
Realizzare il regolatore di velocità lineare riportato in figura
2.
Collegare l’uscita U1 dell’encoder ad un frequenzimetro o all’oscilloscopio
3.
Per diversi valori di δ effettuare le misure della tensione media VAM , della corrente media IAM e della velocità angolare
n (rpm).
4.
Rilevare mediante l'oscilloscopio digitale la forma d'onda in uscita dal timer per un duty cicle del 75%.
Osservazioni
In questo caso il transistor si trova in zona attiva solo durante le transizione del segnale rettangolare.
Regolando il potenziometro si varia il duty cicle δ della tensione vA e quindi il suo valore medio VAM . Il periodo si determina
con la seguente relazione: T = 0.69 ⋅ C ⋅ (2 R + R P ) dove R = R1 = R 2
Domande
-
Quale funzione svolge il diodo D3.
-
Che differenze si rilevano tra i diodi D1, D2 ed il diodo D3 ?
,
0.1
ATTUATORI ELETTRICI
/
0.1
!! )
!!
,(
"
,*
Schema elettrico
/
0.1