Manuale di progettazione 08/2008
SINAMICS S120 Motori asincroni 1PH4
Motori asincroni 1PH4
SINAMICS S120
sinamics
s
Prefazione
SINAMICS S120
Motori asincroni 1PH4
Descrizione dei motori
1
Progettazione
2
Caratteristiche meccaniche
dei motori
3
Dati tecnici e curve
caratteristiche
4
Componenti del motore
5
Tecnica di collegamento
6
Avvertenze sull'uso dei
motori
7
Appendice
A
Manuale di progettazione
(APH4S), 08/2008
6SN1197-0AD64-0CP1
Avvertenze di legge
Concetto di segnaletica di avvertimento
Questo manuale contiene delle norme di sicurezza che devono essere rispettate per salvaguardare l'incolumità
personale e per evitare danni materiali. Le indicazioni da rispettare per garantire la sicurezza personale sono
evidenziate da un simbolo a forma di triangolo mentre quelle per evitare danni materiali non sono precedute dal
triangolo. Gli avvisi di pericolo sono rappresentati come segue e segnalano in ordine descrescente i diversi livelli
di rischio.
PERICOLO
questo simbolo indica che la mancata osservanza delle opportune misure di sicurezza provoca la morte o gravi
lesioni fisiche.
AVVERTENZA
il simbolo indica che la mancata osservanza delle relative misure di sicurezza può causare la morte o gravi
lesioni fisiche.
CAUTELA
con il triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare
lesioni fisiche non gravi.
CAUTELA
senza triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare
danni materiali.
ATTENZIONE
indica che, se non vengono rispettate le relative misure di sicurezza, possono subentrare condizioni o
conseguenze indesiderate.
Nel caso in cui ci siano più livelli di rischio l'avviso di pericolo segnala sempre quello più elevato. Se in un avviso
di pericolo si richiama l'attenzione con il triangolo sul rischio di lesioni alle persone, può anche essere
contemporaneamente segnalato il rischio di possibili danni materiali.
Personale qualificato
L'apparecchio/sistema in questione deve essere installato e messo in servizio solo rispettando le indicazioni
contenute in questa documentazione. La messa in servizio e l'esercizio di un apparecchio/sistema devono essere
eseguiti solo da personale qualificato. Con riferimento alle indicazioni contenute in questa documentazione in
merito alla sicurezza, come personale qualificato si intende quello autorizzato a mettere in servizio, eseguire la
relativa messa a terra e contrassegnare le apparecchiature, i sistemi e i circuiti elettrici rispettando gli standard
della tecnica di sicurezza.
Uso conforme alle prescrizioni di prodotti Siemens
Si prega di tener presente quanto segue:
AVVERTENZA
I prodotti Siemens devono essere utilizzati solo per i casi d’impiego previsti nel catalogo e nella rispettiva
documentazione tecnica. Qualora vengano impiegati prodotti o componenti di terzi, questi devono essere
consigliati oppure approvati da Siemens. Il funzionamento corretto e sicuro dei prodotti presuppone un trasporto,
un magazzinaggio, un’installazione, un montaggio, una messa in servizio, un utilizzo e una manutenzione
appropriati e a regola d’arte. Devono essere rispettate le condizioni ambientali consentite. Devono essere
osservate le avvertenze contenute nella rispettiva documentazione.
Marchio di prodotto
Tutti i nomi di prodotto contrassegnati con ® sono marchi registrati della Siemens AG. Gli altri nomi di prodotto
citati in questo manuale possono essere dei marchi il cui utilizzo da parte di terzi per i propri scopi può violare i
diritti dei proprietari.
Esclusione di responsabilità
Abbiamo controllato che il contenuto di questa documentazione corrisponda all'hardware e al software descritti.
Non potendo comunque escludere eventuali differenze, non possiamo garantire una concordanza perfetta. Il
contenuto di questa documentazione viene tuttavia verificato periodicamente e le eventuali correzioni o modifiche
vengono inserite nelle successive edizioni.
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANIA
N. di ordinazione documentazione: 6SN1197-0AD64-0CP1
Ⓟ 09/2008
Copyright © Siemens AG 2008.
Con riserva di eventuali modifiche tecniche
Prefazione
Informazioni sulla documentazione
Un elenco delle pubblicazioni, con le rispettive lingue disponibili, viene aggiornato
mensilmente e si trova in Internet all'indirizzo: http://www.siemens.com/motioncontrol
Seguire le voci di menu "Support" → "Documentazione tecnica" → "Ordinazione della
documentazione"→ "Documentazione stampata".
La versione Internet di DOConCD, la cosiddetta DOConWEB, si trova al sito:
http://www.automation.siemens.com/doconweb
Informazioni sull’offerta di corsi di formazione e sulle FAQ (frequently asked questions) sono
reperibili in Internet all’indirizzo:
http://www.siemens.com/motioncontrol - menu "Support"
Destinatari
Pianificatori e progettisti
Uso
Il Manuale di progettazione è di supporto nella scelta dei motori, nel calcolo dei componenti
dell'azionamento, nella scelta degli accessori necessari e delle opzioni di potenza della rete
e del motore.
Configurazione standard
L'insieme delle funzionalità descritte nella presente documentazione può discostarsi dalle
funzionalità presenti nel sistema di azionamento fornito. Il sistema di azionamento può
contenere altre funzioni oltre a quelle descritte in questo manuale. Ciò non costituisce però
obbligo di implementazione di tali funzioni in caso di nuove forniture o di assistenza tecnica.
Eventuali integrazioni o le modifiche apportate dal costruttore della macchina vengono
documentate dello stesso.
Inoltre, per motivi di chiarezza, questa documentazione non riporta tutte le informazioni
dettagliate relative alle varie esecuzioni del prodotto e non può nemmeno prendere in
considerazione e trattare ogni possibile caso di montaggio, funzionamento e manutenzione.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
5
Prefazione
Supporto tecnico
Per chiarimenti tecnici rivolgersi alla seguente hotline:
Europa/Africa
Asia/Australia
America
Telefono
+49 (0) 180 5050 – 222
+86 1064 719 990
+1 423 262 2522
Fax
+49 (0) 180 5050 – 223
+86 1064 747 474
+1 423 262 2289
Internet
http://www.siemens.com/automation/support-request
E-mail
mailto:[email protected]
Nota
Per i numeri telefonici dell'assistenza tecnica specifica dei vari paesi, vedere in Internet:
http://www.siemens.com/automation/service&support
Le chiamate sono a carico del mittente (ad es. 0,14€/min da rete fissa in Germania). Le
tariffe per reti di altri operatori possono variare.
Domande sulla documentazione
Per chiarimenti relativi alla documentazione (suggerimenti, correzioni) inviare un fax o una email al seguente indirizzo:
Fax
+49 (0) 9131 / 98-2176
E-mail
mailto: [email protected]
In appendice al presente documento è disponibile un modello fax.
Indirizzo Internet di SINAMICS
http://www.siemens.com/sinamics
Dichiarazioni di conformità CE
La dichiarazione di conformità CE alla direttiva EMC si trova:
● in Internet:
http://support.automation.siemens.com
con il numero di ordinazione 15257461 oppure
● presso la filiale di competenza del settore commerciale A&D MC della Siemens AG.
La dichiarazione di conformità CE relativa alle direttive sulla bassa tensione è
disponibile/reperibile
● in Internet:
http://support.automation.siemens.com
con il numero di ordinazione 22383669 oppure
● presso la filiale di competenza del settore commerciale A&D MC della Siemens AG
6
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Prefazione
Smaltimento
Lo smaltimento dei motori deve avvenire nel rispetto delle prescrizioni nazionali e locali
relative al normale processo di materiali oppure restituendoli al costruttore.
Durante lo smaltimento occorre osservare quanto segue:
● Trattare l'olio secondo la normativa sugli olii esausti (ad es. olio per trasmissione per
accoppiamento riduttori)
● Non miscelare con solvente, detergenti a freddo o residui di vernice
● Separare i componenti per il riciclaggio in base a:
– rottami elettronici (ad es. elettronica del trasduttore, moduli sensori)
– rottame ferroso
– alluminio
– metalli verniciati (ruote di ingranaggi, avvolgimenti di motori)
Avvertenze di pericolo
PERICOLO
La messa in servizio non è consentita fino a quando non è stato accertato che la macchina
sulla quale devono essere installati i componenti descritti nel presente manuale è conforme
alle disposizioni della direttiva macchine CE.
La messa in servizio delle apparecchiature SINAMICS e dei motori può essere eseguita
solo da personale adeguatamente qualificato.
Questo personale deve osservare la documentazione tecnica relativa al prodotto, nonché
conoscere a fondo e rispettare le relative indicazioni di pericolo e di avvertimento.
Quando un'apparecchiatura elettrica o un motore sono in funzione, i circuiti elettrici sono
sottoposti a tensioni pericolose.
Durante il funzionamento dell'impianto sono possibili movimenti pericolosi degli assi.
Tutti i lavori sull'impianto elettrico devono avvenire in assenza di tensione.
I motori sono omologati congiuntamente al sistema di azionamento per operare su reti TN e
TT con centro stella messo a terra, nonché su reti IT.
Nel funzionamento su reti IT la comparsa di un primo errore tra una parte attiva e la terra
deve essere segnalata da un dispositivo di monitoraggio. La norma IEC 60364-4-41
raccomanda di fare il possibile per eliminare al più presto il primo errore.
Nelle reti con conduttore esterno messo a terra occorre inserire un trasformatore di
isolamento con centro stella messo a terra (lato secondario) tra rete e sistema di
azionamento, in modo da evitare sollecitazioni non ammesse dell'isolamento del motore.
Dal momento che prevalgono le reti TT con conduttore esterno messo a terra, non è
necessario impiegare un trasformatore di separazione.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
7
Prefazione
AVVERTENZA
Per un funzionamento ottimale e sicuro di queste apparecchiature e dei motori è essenziale
che il trasporto sia corretto e che l'immagazzinaggio, l'installazione e il montaggio siano
stati eseguiti con la cura necessaria.
Per l'esecuzione di varianti speciali per le apparecchiature e i motori è necessario fare
riferimento alle indicazioni riportate nei cataloghi e nelle offerte.
Oltre alle segnalazioni di rischio e agli avvisi di pericolo contenuti nella documentazione
tecnica fornita, vanno tenute presenti anche le normative nazionali, locali e le prescrizioni
relative all'impianto.
CAUTELA
La temperatura sulla superficie esterna dei motori può superare 100 °C.
Per questo motivo non devono trovarsi nelle immediate vicinanze del motore, o essere
fissati allo stesso, componenti termosensibili quali p. es. cavi o componenti elettronici.
Si deve fare assolutamente evitare che in fase di montaggio i cavi di collegamento
– vengano danneggiati
– siano tirati
– si possano impigliare in parti in rotazione.
CAUTELA
Il collegamento dei motori va eseguito sulla base delle istruzioni operative fornite. Non è
consentito il collegamento diretto dei motori alla rete in corrente alternata perchè questo
potrebbe distruggere i motori.
Le apparecchiature SINAMICS con motori, durante la prova individuale, vengono
sottoposte ad una prova dielettrica. Non è consentito effettuare sul motore un test
aggiuntivo ad alta tensione; questo test potrebbe infatti distruggere componenti elettronici
come i sensori di temperatura o i trasduttori.
CAUTELA
L'interfaccia DRIVE-CLiQ contiene dati specifici sul motore e sul trasduttore, oltre ad una
targhetta elettronica relativa al tipo, quindi questo Sensor Module (modulo sensore) può
essere utilizzato solo per un motore originale e non per altri motori e non può essere
sostituito con Sensor Module di altri motori.
L'interfaccia DRIVE-CLiQ è a diretto contatto con componenti sensibili alle cariche
elettrostatiche (ESD). I collegamenti non devono venire a contatto con le mani o con
utensili che siano caricati elettrostaticamente.
Nota
Le apparecchiature SINAMICS con motori in condizioni adeguate di esercizio e in ambienti
operativi asciutti soddisfano la Direttiva Bassa Tensione.
Le apparecchiature SINAMICS con motori soddisfano la Direttiva EMC per le configurazioni
indicate nella relativa dichiarazione di conformità CE.
8
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Prefazione
Avvertenze ESD e campi elettromagnetici
CAUTELA
Elecrostatic Sensitive Devices (ESD) sono componenti singoli, circuiti integrati o schede
che possono essere danneggiati da campi o scariche elettrostatiche.
Manipolazione - prescrizioni per i componenti ESD:
Lavorando con componenti elettronici è indispensabile provvedere ad una buona messa a
terra della persona, della stazione di lavoro e dell'imballaggio!
I componenti elettronici devono essere manipolati solo in aree ESD con pavimentazione
dotata di ottima conducibilità se il personale
– indossa l'apposito bracciale ESD messo a terra e
– porta scarpe ESD o gli appositi nastri ESD per la messa a terra delle scarpe.
Il contatto con componenti elettronici va comunque evitato se non strettamente
indispensabile.
I componenti elettronici non devono venire a contatto con elementi in plastica e indumenti
con parti in plastica.
Le schede elettroniche possono essere depositate solo su ripiani dotati di ottima
conducibilità (tavoli con rivestimento ESD, gommapiuma ESD con ottima conducibilità,
buste ESD per l'imballo, contenitori ESD per il trasporto).
Le schede elettroniche non devono essere collocate nelle vicinanze di videoterminali,
monitor o televisori. Distanza dallo schermo > 10 cm).
Sulle schede elettroniche si possono eseguire misure se
– l'apparecchio di misura è messo a terra (p. es. tramite apposito conduttore di terra)
oppure
– prima della misura, nel caso di apparecchi di misura non messi a terra, il puntale di
misura viene messo per breve tempo a terra (p. es. toccando una parte non verniciata della
custodia dell'apparecchiatura di comando).
Avvertenza sui prodotti di terze parti
ATTENZIONE
Questo stampato contiene raccomandazioni su prodotti di terze parti. Si tratta di prodotti di
altri fornitori, di cui conosciamo l'idoneità di massima. Naturalmente si possono utilizzare
prodotti di ulteriori fornitori con caratteristiche analoghe. Le nostre indicazioni devono
essere intese come informazione e non come prescrizione. Siemens non si assume alcuna
responsabilità per la qualità dei prodotti di terze parti.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
9
Prefazione
Rischi residui di Power Drive System
Nell'ambito della valutazione dei rischi della macchina, da eseguire conformemente alla
direttiva macchine CE, il costruttore della macchina deve considerare i seguenti rischi residui
derivanti dai componenti per il controllo e l'azionamento di un Power Drive System (PDS).
1. Movimenti indesiderati di parti della macchina motorizzate durante la messa in servizio, il
funzionamento, la manutenzione e la riparazione, dovuti ad esempio a
– Errori hardware e/o software nei sensori, nel controllo, negli attuatori e nella tecnica di
collegamento
– Tempi di reazione del controllo e dell'azionamento
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Errori durante la parametrizzazione, la programmazione, il cablaggio e il montaggio
– Utilizzo di apparecchiature radio / telefoni cellulari nelle immediate vicinanze del
controllo
– Influenze esterne / danneggiamenti.
2. Temperature eccezionali nonché emissioni di luce, rumori, particelle e gas, dovuti ad
esempio a
– Guasto a componenti
– Errore software
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Influenze esterne / danneggiamenti.
3. Tensioni di contatto pericolose, ad esempio dovute a
– Guasto a componenti
– Influenza in caso di cariche elettrostatiche
– Induzione di tensioni con motori in movimento
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Condensa / imbrattamenti conduttivi
– Influenze esterne / danneggiamenti
4. Campi elettrici, magnetici ed elettromagnetici in condizioni di esercizio che ad es.
possono essere pericolosi per portatori di pacemaker, impianti od oggetti metallici in caso
di distanza insufficiente.
5. Rilascio di sostanze ed emissioni dannose per l'ambiente in caso di utilizzo non
appropriato e/o smaltimento non corretto dei componenti.
Per ulteriori informazioni sui rischi residui derivanti dai componenti del PDS, consultare la
Documentazione tecnica per l'utente ai capitoli relativi.
10
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Indice del contenuto
Prefazione ................................................................................................................................................. 5
1
2
3
4
Descrizione dei motori ............................................................................................................................. 13
1.1
Proprietà.......................................................................................................................................13
1.2
Caratteristiche tecniche ...............................................................................................................15
1.3
Dati tecnici....................................................................................................................................17
1.4
1.4.1
1.4.2
Dati per la scelta e l'ordinazione ..................................................................................................18
Dati per la scelta e l'ordinazione di macchine di produzione .......................................................18
Dati per la scelta e l'ordinazione di macchine utensili .................................................................24
1.5
Targhetta dei dati tecnici (targhetta identificativa) .......................................................................26
Progettazione .......................................................................................................................................... 29
2.1
2.1.1
2.1.2
2.1.3
Software di progettazione ............................................................................................................29
Tool di progettazione SIZER........................................................................................................29
Software di azionamento/di messa in servizio STARTER...........................................................31
Tool di messa in servizio SinuCom..............................................................................................31
2.2
Procedura di progettazione..........................................................................................................32
2.3
2.3.1
2.3.2
2.3.3
2.3.4
2.3.5
2.3.6
Selezione e definizione dei motori asincroni................................................................................33
Chiarimenti sul tipo di azionamento.............................................................................................33
Definizione delle condizioni al contorno e integrazione nell'automazione...................................33
Selezione dei motori asincroni .....................................................................................................34
Il motore ha un funzionamento continuo......................................................................................34
Il motore funziona in un ciclo di carico periodico .........................................................................35
Necessario maggiore settore ad indebolimento del campo.........................................................37
Caratteristiche meccaniche dei motori ..................................................................................................... 39
3.1
Raffreddamento ...........................................................................................................................39
3.2
Grado di protezione .....................................................................................................................43
3.3
Esecuzione dei cuscinetti e durata utile.......................................................................................43
3.4
Forza radiale (forza trasversale) ..................................................................................................46
3.5
Forza assiale................................................................................................................................56
3.6
Estremità dell'albero e equilibratura.............................................................................................57
3.7
Concentricità, coassialità e planarità ...........................................................................................58
3.8
Grado di vibrazione......................................................................................................................59
3.9
Verniciatura ..................................................................................................................................59
Dati tecnici e curve caratteristiche ........................................................................................................... 61
4.1
Funzionamento e caratteristiche..................................................................................................61
4.2
Traslazione della curva caratteristica del limite di tensione.........................................................63
4.3
Curve caratteristiche P/n e M/n....................................................................................................64
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
11
Indice del contenuto
5
6
7
A
4.3.1
4.3.2
Curve caratteristiche per macchine di produzione...................................................................... 65
Curve caratteristiche per macchine utensili ................................................................................ 74
4.4
Disegni quotati ............................................................................................................................ 84
Componenti del motore ........................................................................................................................... 89
5.1
Protezione termica del motore .................................................................................................... 89
5.2
5.2.1
5.2.2
5.2.3
5.2.4
5.2.5
Encoder ....................................................................................................................................... 91
Collegamento trasduttore per motori con interfaccia DRIVE-CLiQ ............................................ 92
Collegamento encoder per motori senza interfaccia DRIVE-CLiQ ............................................. 92
Encoder incrementale HTL ......................................................................................................... 93
Encoder incrementale sen/cos 1 Vpp ......................................................................................... 95
Encoder assoluto (EnDat) ........................................................................................................... 97
5.3
Freno di stazionamento............................................................................................................... 99
5.4
5.4.1
5.4.2
5.4.3
5.4.4
5.4.5
5.4.6
5.4.7
5.4.8
5.4.9
5.4.10
Riduttore.................................................................................................................................... 102
Struttura del riduttore ................................................................................................................ 104
Dati tecnici................................................................................................................................. 105
Collegamento elettrico .............................................................................................................. 106
Commutazione della gamma di velocità ................................................................................... 107
Lubrificazione ............................................................................................................................ 109
Connessioni lubrificazione a circolazione, altezza d'asse 100 ................................................. 110
Collegamenti per lubrificazione a circolazione, altezze d'asse 132 e 160................................ 111
Dimensioni della flangia ............................................................................................................ 112
Dimensioni del riduttore ............................................................................................................ 113
Scostamenti di misura ammessi ............................................................................................... 115
Tecnica di collegamento ........................................................................................................................ 117
6.1
Periferia di azionamento SINAMICS......................................................................................... 117
6.2
Collegamento della potenza...................................................................................................... 118
6.3
Collegamento del segnale......................................................................................................... 121
Avvertenze sull'uso dei motori ............................................................................................................... 125
7.1
Trasporto / immagazzinaggio nel periodo precedente all'utilizzo ............................................. 125
7.2
Condizioni ambientali ................................................................................................................ 125
7.3
Posa dei cavi in ambienti umidi................................................................................................. 125
7.4
Posizione di montaggio/forme costruttive ................................................................................. 126
7.5
Montaggio.................................................................................................................................. 127
Appendice.............................................................................................................................................. 131
A.1
Definizione dei concetti ............................................................................................................. 131
A.2
Bibliografia ................................................................................................................................ 134
A.3
Proposte/correzioni ................................................................................................................... 135
Indice analitico ....................................................................................................................................... 137
12
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Descrizione dei motori
1.1
1
Proprietà
Panoramica
I motori in corrente alternata della serie costruttiva 1PH4 sono motori asincroni compatti
raffreddati ad acqua, con rotore a gabbia e grado di protezione elevato.
Questi motori sono stati progettati principalmente per il funzionamento con il sistema di
azionamento SINAMICS S120. Si possono così ridurre le perdite di potenza e la rumorosità
a valori minimi. In base alle esigenze di regolazione, per questi motori sono disponibili
opportuni sistemi di misura per il rilevamento dei giri del motore e della posizione indiretta.
Nelle macchine utensili l'encoder può essere utilizzato di default anche per la gestione
dell'asse C, risparmiando così l'applicazione di un ulteriore encoder.
Figura 1-1
Motore in corrente alternata 1PH4
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
13
Descrizione dei motori
1.1 Proprietà
Vantaggi
● Elevata densità di potenza con ingombri ridotti
● Elevato grado di protezione (IP65, uscita dell'albero IP55)
● Velocità fino a zero giri senza riduzione della coppia
● Nessuna sollecitazione termica dovuta alla meccanica accoppiata grazie al
raffreddamento della flangia
● Basso livello di rumorosità
● Carico forza radiale elevato
● Robustezza
● Manutenzione minima
● Elevata regolarità di rotazione
● Sistema encoder integrato per il rilevamento dei giri motore, collegamento tramite
connettore
● Morsettiera per il collegamento del cavo di potenza
● Sorveglianza della temperatura motore con KTY 84
● Pressione dell'acqua max. ammessa 6 bar
Campo d'impiego
● In tutti i casi in cui le condizioni ambientali estreme (polvere, sporcizia o atmosfera
aggressiva) non consentono il raffreddamento ad aria.
● Nei processi dove l'ambiente non deve essere influenzato termicamente
● Su macchine speciali dove è presente acqua di raffreddamento dovuta al processo
● Fresatrici completamente incapsulate
● Mandrini di fresatura con sollecitazioni elevate
● Contromandrini o utensili motorizzati per torni
ATTENZIONE
Impiego non ammesso negli ambienti a rischio di esplosione.
14
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Descrizione dei motori
1.2 Caratteristiche tecniche
1.2
Caratteristiche tecniche
Tabella 1- 1
Caratteristiche tecniche dell'esecuzione standard
Caratteristica tecnica
Esecuzione
Isolamento dell'avvolgimento
statorico secondo EN 60034-1
(IEC 60034-1)
Classe termica 155 (F) per una temperatura del ingresso del refrigerante
di +30 °C max.
Forma costruttiva secondo
EN 60034-7 (IEC 60034-7)
IM B35 (IM V15, IM V36)
Grado di protezione secondo
EN 60034-5 (IEC 60034-5)
IP65 (all'uscita dell'albero IP55)
Raffreddamento secondo
EN 60034-6 (IEC 60034-6)
Raffreddamento ad acqua
Sorveglianza temperatura secondo
EN 60034-11 (IEC 60034-11)
Sensore di temperatura KTY 84 nell'avvolgimento statorico
Estremità dell'albero lato DE secondo
DIN 748-3 (IEC 60072-1)
Cilindrica con cava per chiavetta e chiavetta, equilibratura con chiavetta intera;
Regolarità di rotazione, coassialità e
planarità secondo DIN 42955
(IEC 60072-1)
Classe di tolleranza N (stato a temperatura di esercizio)
Gradi di vibrazione secondo
EN 60034-14 (IEC 60034-14)
Il livello A viene mantenuto fino alla velocità nominale
Rumorosità del motore secondo
DIN EN ISO 1680, tolleranza +3 dB(A)
1PH410❑: 69 dB(A)
1PH413❑: 69 dB(A)
1PH416❑: 71 dB(A)
Esecuzioni dei cuscinetti
Cuscinetto doppio 1) sul lato DE per l'azionamento a cinghia (forza radiale
minima necessaria)
Sistema di encoder, integrato per motori •
senza interfaccia DRIVE-CLiQ
•
•
•
•
Sistema di encoder, integrato per motori •
con interfaccia DRIVE-CLiQ
•
•
Encoder assoluto 2048 S/R Singleturn, 4096 rotazioni Multiturn, con
interfaccia EnDat (encoder AM2048S/R)
Encoder incrementale HTL 1024 S/R (encoder HTL1024S/R)
Encoder incrementale HTL 2048 S/R (encoder HTL2048S/R)
Encoder incrementale sen/cos 1 Vpp, 2048 S/R con le tracce C e D
(encoder IC2048S/R)
Encoder incrementale sen/cos 1 Vpp, 2048 S/R senza tracce C e D
(encoder IN2048S/R)
Encoder assoluto 22 bit Singleturn (risoluzione 4194304, internamente
all'encoder 2048 S/R) + 12 bit Multiturn (campo di movimento 4096 giri)
(encoder AM22DQ)
Encoder incrementale 22 bit (risoluzione 4194304, internamente all'encoder
2048 S/R), con posizione di commutazione 11 bit (encoder IC22DQ)
Encoder incrementale 22 bit (risoluzione 4194304, internamente all'encoder
2048 S/R), senza posizione di commutazione (encoder IN19DQ)
Collegamento
Connettore per segnali (il controconnettore non è compreso nella fornitura)
morsettiera per cavi;
morsettiera in alto (ruotabile di 4 x90°)
Verniciatura
Antracite (RAL 7016)
Opzioni
Vedere le opzioni e i dati di scelta e di ordinazione
S/R = Signals pro Revolution
1) non adatto per trasmissione con giunto
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
15
Descrizione dei motori
1.2 Caratteristiche tecniche
Tabella 1- 2
Opzioni
Opzione
Codice
Descrizione
Esecuzione cuscinetti (vista su DE)
K00
Cuscinetto semplice
• per giunto 1)
• per riduttori epicicloidali, per es. riduttori ZF tipo
2LG43❑❑❑, forme costruttive IM B35, IM V15 1) 2)
• per carichi radiali medio-bassi
Ampiezza vibrazioni
secondo EN 60034-14 (IEC 60034-14)
K05
K02
K03
•
•
•
Concentricità, coassialità e planarità
secondo DIN 42955 (IEC 60072-1)
K04
Tolleranza R 4)
Estremità d'albero (DE)
K42
L69
•
•
Guarnizione dell'albero (DE) 5)
K18
Guarnizione albero radiale, a tenuta d'olio, IP65
Freno di stazionamento 1)
G46
G95
•
•
Con freno di stazionamento montato sul lato DE
il motore è predisposto per il montaggio di un freno di
stazionamento
Disposizione della morsettiera (vista su DE) K09
K10
•
•
di lato a destra
di lato a sinistra
Rotazione della morsettiera
K83
K84
K85
•
•
•
di 90°, ingresso cavi dal lato DE
di 90°, ingresso cavi dal lato NDE
di 180°
N. di giri6)
L37
Velocità max. aumentata ed equilibratura con mezza
chiavetta
Targhetta dei dati tecnici (targhetta
identificativa)
K31
Seconda targhetta dei dati tecnica (targhetta identificativa)
fornita sciolta
Sistema encoder
H30
senza encoder
1)
2)
3)
4)
5)
6)
Livello S con cuscinetti doppi3)
Livello S con cuscinetto semplice3)
Livello SR con cuscinetto semplice3)
Albero liscio
Equilibratura con mezza chiavetta
Le opzioni si escludono a vicenda.
Con il riduttore integrato non sono possibili i gradi di vibrazione S/SR. Per i riduttori 2LG42❑❑❑ si deve utilizzare la
sigla abbreviata K00 + G97 (per la scelta del riduttore vedere il capitolo "Riduttore").
Comprende automaticamente l'esecuzione K04.
Precisione dell'albero più elevata.
Consigliabile solo se la guarnizione ad anello viene lubrificata saltuariamente con olio nebulizzato o spruzzi di olio.
L'esecuzione per il numero di giri max. maggiorato include il grado di vibrazione SR e l'equilibratura con mezza
chiavetta. Le seguenti opzioni non sono possibili:
● predisposizione al montaggio del riduttore ZF
● guarnizione dell'albero
16
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Descrizione dei motori
1.3 Dati tecnici
1.3
Dati tecnici
Tabella 1- 3
Dati tecnici della serie costruttiva 1PH4
Tipo di motore
PN
[kW]
nN [1/min]
nmax1)
con
cuscinett
o doppio
[1/min]
nmax1) con
K00
con
cuscinett
o
semplice
[1/min]
MN[Nm
]
nmax1)
con L37
[1/min]
J [kgm2]
IN [A]
I0 [A]
UN [V]
Altezza asse 100 mm
1PH4103-4❑F26
7,5
1500
7500
9000
12000
48
0,017
26
12
265
1PH4103-4❑F56
7,5
1500
7500
9000
-
48
0,017
20,5
11
350
1PH4105-4❑F26
11
1500
7500
9000
12000
70
0,024
38
16
263
1PH4105-4❑F56
11
1500
7500
9000
-
70
0,024
28
13
350
1PH4107-4❑F26
14
1500
7500
9000
12000
90
0,031
46
19
265
1PH4107-4❑F56
14
1500
7500
9000
-
89
0,031
35,5
17
350
1PH4133-4❑F26
15
1500
6700
8000
11000
95
0,046
55
17
229
1PH4133-4❑F56
15
1500
6700
8000
-
95
0,046
35
11
350
1PH4135-4❑F26
22
1500
6700
8000
10000
140
0,071
73
26
251
1PH4135-4❑F56
22
1500
6700
8000
-
140
0,071
52
21
350
1PH4137-4❑F26
27
1500
6700
8000
10000
170
0,085
85
31
265
1PH4137-4❑F56
27
1500
6700
8000
-
172
0,085
62
21
350
1PH4138-4❑F26
30
1500
6700
8000
10000
190
0,104
102
34
244
1PH4163–4❑F26
37
1500
5300
6500
8000
235
0,17
107
44
286
1PH4163-4❑F56
37
1500
5300
6500
-
236
0,17
89
43
350
1PH4167–4❑F26
46
1500
5300
6500
8000
293
0,206
120
49
315
Altezza asse 132 mm
Altezza asse 160 mm
1PH4167-4❑F56
46
1500
5300
6500
-
293
0,206
107
46
350
1PH4168–4❑F26
52
1500
5300
6500
8000
331
0,22
148
59
284
1PH4168-4❑F56
52
1500
5300
6500
-
331
0,22
117
44
350
1)
Per la velocità massima con la potenza S1 e S6 vedere il diagramma P-n; per la velocità massima in
funzionamento continuativo vedere la tabella "Intervallo per la sostituzione dei cuscinetti".
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
17
Descrizione dei motori
1.4 Dati per la scelta e l'ordinazione
1.4
Dati per la scelta e l'ordinazione
1.4.1
Dati per la scelta e l'ordinazione di macchine di produzione
1PH4 - Tensione di rete 3 AC 400 V, Servo Control
Rated
speed
Shaft
height
SH
Rated
power
Rated
torque
Rated
current
Rated
voltage
Speed during
field
weakening 1)
Max. permissi- Max.
ble continuous speed
3)
speed 2)
nrated
Prated
Mrated
Irated
Vrated
n2
nS1
nmax
rpm
kW/HP
Nm/lbf-ft
A
V
rpm
rpm
rpm
1PH4 asynchronous motor
4)
Order No.
400 V 3 AC line voltage, Servo Control
1500
100
132
160
Encoder systems
for motors without
DRIVE-CLiQ interface:
Encoder systems
for motors with
DRIVE-CLiQ interface:
18
7.5/10.1
48/35.4
20.5
350
3200
5600
7500 6) 1PH4103- 4 7 F 5 6
11/14.8
70/51.6
28
350
2900
5600
7500 6)
1PH4105- 4 7 F 5 6
14/18.8
89/65.6
35.5
350
3150
5600
7500 6)
1PH4107- 4 7 F 5 6
15/20.1
95/70
35
350
2200
5200
6700
1PH4133- 4 7 F 5 6
22/29.5
140/103.2
52
350
2600
5200
6700
1PH4135- 4 7 F 5 6
27/36.2
172/126.8
62
350
2450
5200
6700
1PH4137- 4 7 F 5 6
37/49.6
236/173.9
89
350
3000
4000
5300
1PH4163- 4 7 F 5 6
46/61.7
293/215.9
107
350
2850
4000
5300
1PH4167- 4 7 F 5 6
52/69.7
331/243.9
117
350
2700
4000
5300
1PH4168- 4 7 F 5 6
Absolute encoder EnDat 2048 pulses/revolution (Encoder AM2048S/R)
Incremental encoder HTL 1024 pulses/revolution (Encoder HTL1024S/R)
Incremental encoder HTL 2048 pulses/revolution (Encoder HTL2048S/R)
Incremental encoder sin/cos 1 Vpp with C and D tracks (Encoder IC2048S/R)
Incremental encoder sin/cos 1 Vpp without C and D tracks (Encoder IN2048S/R)
E
H
J
M
N
Absolute encoder EnDat 2048 pulses/revolution (Encoder AM22DQ)
Incremental encoder sin/cos 1 Vpp with C and D tracks (Encoder IC22DQ)
Incremental encoder sin/cos 1 Vpp without C and D tracks (Encoder IN22DQ)
F
D
Q
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Descrizione dei motori
1.4 Dati per la scelta e l'ordinazione
1PH4 - Tensione di rete 3 AC 400 V, Servo Control
Power
factor
cos ϕ
Magnetizing
current
Efficiency
Rated
frequency
Moment of
inertia of
Iμ
η rated
frated
J
Hz
kgm2/
lbf-in-s2
A
Weight,
approx.
1PH4 asynchronous motor 4)
kg/lb
Order No.
SINAMICS S120 Motor Module
Rated output current
Irated
A
Order No.
400 V 3 AC line voltage, Servo Control
0.74
12
0.820
52.8
0.017/0.15
52/114.66
1PH4103- 4 . F 5 6
18 5)
6SL3120- 7 T E21-8AA 7
0.78
13.5
0.836
52.9
0.024/0.212
67/147.74
1PH4105- 4 . F 5 6
30
6SL3120- 1 T E23-0AA 1
0.77
18.5
0.851
52.5
0.031/0.274
80/176.4
1PH4107- 4 . F 5 6
45
6SL3120- 1 T E24-5AA 1
0.81
13
0.877
51.8
0.046/0.407
90/198.45
1PH4133- 4 . F 5 6
45
6SL3120- 1 T E24-5AA 1
0.79
24
0.890
51.4
0.071/0.628
112/246.96 1PH4135- 4 . F 5 6
60
6SL3120- 1 T E26-0AA 1
0.81
24
0.895
51.5
0.085/0.752
130/286.65 1PH4137- 4 . F 5 6
60 5)
6SL3120- 1 T E26-0AA 1
0.77
45
0.905
50.9
0.10/1.505
175/385.88 1PH4163- 4 . F 5 6
85 5)
6SL3120- 1 T E28-5AA 1
0.79
48
0.910
51.0
0.206/1.823
210/463.05 1PH4167- 4 . F 5 6
132
6SL3120- 1 T E31-3AA 0
0.81
48
0.913
51.0
0.220/1.947
240/529.2
132
6SL3120- 1 T E31-3AA 0
1PH4168- 4 . F 5 6
Special versions:
Specify supplementary order code and plain text if applicable
(see Options).
Motor Module:
Single Motor Module
Double Motor Module
1)
2)
3)
n2: Max. permissible thermal speed at constant output or speed,
which is at the voltage limit when P = Prated.
nS1: Max. permissible speed that is continuously permitted without
speed duty cycles.
nmax: Maximum speed which must not be exceeded.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
–Z
1
2
4)
5)
6)
1
0
Standard design with duplex bearing.
The rated output current of the Motor Module is lower than the motor
rated current.
Speed is limited to lower values in some cases. The following restriction applies: Max. output frequency < 5 × motor rated frequency.
19
Descrizione dei motori
1.4 Dati per la scelta e l'ordinazione
1PH4 - Tensione di rete 3 AC 400 V, Vector Control
Rated
speed
Shaft
height
SH
Rated
power
Rated
torque
Rated
current
Rated
voltage
Speed during
field
weakening 1)
Max. permissi- Max.
ble continuous speed
3)
speed 2)
nrated
Prated
Mrated
Irated
Vrated
n2
nS1
nmax
rpm
kW/HP
Nm/lbf-ft
A
V
rpm
rpm
rpm
Order No.
1PH4 asynchronous motor
4)
400 V 3 AC line voltage, Vector Control
1750
100
132
160
Encoder systems
for motors without
DRIVE-CLiQ interface:
Encoder systems
for motors with
DRIVE-CLiQ interface:
20
8.8/11.8
48/35.4
20.5
400
3750
5600
7500 6)
1PH4103- 4 7 F 5 6
12.8/17.2
70/51.6
28
400
3450
5600
7500 6)
1PH4105- 4 7 F 5 6
16.3/21.9
89/65.6
35.5
400
3700
5600
7500 6)
1PH4107- 4 7 F 5 6
17.5/23.5
96/70.8
35.5
400
2550
5200
6700
1PH4133- 4 7 F 5 6
25.5/34.2
139/102.4
52
400
3000
5200
6700
1PH4135- 4 7 F 5 6
31.5/42.2
172/126.8
63
400
2800
5200
6700
1PH4137- 4 7 F 5 6
43/57.7
235/173.2
88
400
3400
4000
5300
1PH4163- 4 7 F 5 6
54/72.4
295/217.4
107
400
3200
4000
5300
1PH4167- 4 7 F 5 6
61/81.8
333/245.4
117
400
3050
4000
5300
1PH4168- 4 7 F 5 6
Absolute encoder EnDat 2048 pulses/revolution (Encoder AM2048S/R)
Incremental encoder HTL 1024 pulses/revolution (Encoder HTL1024S/R)
Incremental encoder HTL 2048 pulses/revolution (Encoder HTL2048S/R)
Incremental encoder sin/cos 1 Vpp with C and D tracks (Encoder IC2048S/R)
Incremental encoder sin/cos 1 Vpp without C and D tracks (Encoder IN2048S/R)
E
H
J
M
N
Absolute encoder EnDat 2048 pulses/revolution (Encoder AM22DQ)
Incremental encoder sin/cos 1 Vpp with C and D tracks (Encoder IC22DQ)
Incremental encoder sin/cos 1 Vpp without C and D tracks (Encoder IN22DQ)
F
D
Q
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Descrizione dei motori
1.4 Dati per la scelta e l'ordinazione
1PH4 - Tensione di rete 3 AC 400 V, Vector Control
Power
factor
cos ϕ
Magnetizing current
Efficiency
Rated
frequency
Moment of
inertia of
Iμ
η rated
frated
J
Hz
A
Weight,
approx.
1PH4 asynchronous
motor 1PH4 4)
kgm2/
lbf-in-s2
kg/lb
Order No.
SINAMICS S120 Motor Module
Rated output current
Irated
A
Order No.
400 V 3 AC line voltage, Vector Control
0.75
11.5
0.841
61.2
0.017/0.15
52/114.66
1PH4103- 4 . F 5 6
18 5)
6SL3120- 7 T E21-8AA 7
0.78
13.5
0.854
61.3
0.024/0.212
67/147.74
1PH4105- 4 . F 5 6
30
6SL3120- 1 T E23-0AA 1
0.78
18
0.867
61.0
0.031/0.274
80/176.4
1PH4107- 4 . F 5 6
45
6SL3120- 1 T E24-5AA 1
0.82
12
0.887
60.2
0.046/0.407
90/198.45
1PH4133- 4 . F 5 6
45
6SL3120- 1 T E24-5AA 1
0.79
22
0.901
59.8
0.071/0.628
112/246.96
1PH4135- 4 . F 5 6
60
6SL3120- 1 T E26-0AA 1
0.81
23
0.905
59.9
0.085/0.752
130/286.65
1PH4137- 4 . F 5 6
60 5)
6SL3120- 1 T E26-0AA 1
0.78
42
0.914
59.3
0.170/1.505
175/385.88
1PH4163- 4 . F 5 6
85 5)
6SL3120- 1 T E28-5AA 1
0.80
44
0.920
59.4
0.206/1.823
210/463.05
1PH4167- 4 . F 5 6
132
6SL3120- 1 T E31-3AA 0
0.82
43
0.921
59.4
0.220/1.947
240/529.2
1PH4168- 4 . F 5 6
132
6SL3120- 1 T E31-3AA 0
Special versions:
Specify supplementary order code and plain text if applicable
(see Options).
Motor Module:
Single Motor Module
Double Motor Module
1)
n2: Max. permissible thermal speed at constant output or speed,
which is at the voltage limit when P = Prated.
2) n : Max. permissible speed that is continuously permitted without
S1
speed duty cycles.
3) n
max: Maximum speed which must not be exceeded.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
–Z
1
2
1
0
4)
Standard design with duplex bearing.
The rated output current of the Motor Module is lower than the motor
rated current.
6) Speed is limited to lower values in some cases. The following restriction
applies: Max. output frequency < 5 × motor rated frequency.
5)
21
Descrizione dei motori
1.4 Dati per la scelta e l'ordinazione
1PH4 - Tensione di rete 3 AC 480 V, Servo/Vector Control
Rated
speed
Shaft
height
SH
Rated
power
Rated
torque
Rated
current
Rated
voltage
Speed during
field
weakening 1)
Max. permissi- Max.
1PH4 asynchronous motor
ble continuous speed 3)
speed 2)
nrated
Prated
Mrated
Irated
Vrated
n2
nS1
nmax
rpm
kW/HP
Nm/lbf-ft
A
V
rpm
rpm
rpm
4)
Order No.
480 V 3 AC line voltage, Servo/Vector Control
2000
100
132
160
Encoder systems
for motors without
DRIVE-CLiQ interface:
Encoder systems
for motors with
DRIVE-CLiQ interface:
22
9.5/12.7
45/33.2
19.5
450
4850
5600
7500 6) 1PH4103- 4 7 F 5 6
14/18.8
67/49.4
26.5
450
4450
5600
7500 6) 1PH4105- 4 7 F 5 6
18/24.1
86/63.4
34.5
450
4700
5600
7500 6) 1PH4107- 4 7 F 5 6
19/25.5
91/67.1
33.5
450
3300
5200
6700
1PH4133- 4 7 F 5 6
28/37.6
134/98.8
50
450
3720
5200
6700
1PH4135- 4 7 F 5 6
34/45.6
162/119.4
59
450
3600
5200
6700
1PH4137- 4 7 F 5 6
47/63.0
224/165.1
84
450
4300
4000
5300
1PH4163- 4 7 F 5 6
58/77.8
277/204.1
101
450
3980
4000
5300
1PH4167- 4 7 F 5 6
65/87.2
310/228.5
110
450
3750
4000
5300
1PH4168- 4 7 F 5 6
Absolute encoder EnDat 2048 pulses/revolution (Encoder AM2048S/R)
Incremental encoder HTL 1024 pulses/revolution (Encoder HTL1024S/R)
Incremental encoder HTL 2048 pulses/revolution (Encoder HTL2048S/R)
Incremental encoder sin/cos 1 Vpp with C and D tracks (Encoder IC2048S/R)
Incremental encoder sin/cos 1 Vpp without C and D tracks (Encoder IN2048S/R)
E
H
J
M
N
Absolute encoder EnDat 2048 pulses/revolution (Encoder AM22DQ)
Incremental encoder sin/cos 1 Vpp with C and D tracks (Encoder IC22DQ)
Incremental encoder sin/cos 1 Vpp without C and D tracks (Encoder IN22DQ)
F
D
Q
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Descrizione dei motori
1.4 Dati per la scelta e l'ordinazione
1PH4 - Tensione di rete 3 AC 480 V, Servo/Vector Control
Power
factor
cos ϕ
Magnetizing current
Efficiency
Rated
frequency
Moment of
inertia of
Iμ
η rated
frated
J
Hz
kgm2/lbf-in-s2 kg/lb
Order No.
A
Weight,
approx.
1PH4 asynchronous
motor 1PH4 4)
SINAMICS S120 Motor Module
Rated output current
Irated
A
Order No.
480 V 3 AC line voltage, Servo/Vector Control
0.74
11.2
0.856
69.3
0.017/0.15
52/114.66
1PH4 103- 4 . F 5 6
18 5)
6SL3120- 7 T E21-8AA 7
0.79
12.9
0.870
69.4
0.024/0.212
67/147.74
1PH4 105- 4 . F 5 6
30
6SL3120- 1 T E23-0AA 1
0.78
17.1
0.879
69.1
0.031/0.274
80/176.4
1PH4 107- 4 . F 5 6
45
6SL3120- 1 T E24-5AA 1
0.83
11.9
0.899
68.4
0.046/0.407
90/198.45
1PH4 133- 4 . F 5 6
45
6SL3120- 1 T E24-5AA 1
0.80
21.5
0.909
68.1
0.071/0.628
112/246.96 1PH4 135- 4 . F 5 6
60
6SL3120- 1 T E26-0AA 1
0.83
22.1
0.914
68.1
0.085/0.752
130/286.65 1PH4 137- 4 . F 5 6
60
6SL3120- 1 T E26-0AA 1
0.79
39.7
0.923
67.6
0.170/1.505
175/385.88 1PH4 163- 4 . F 5 6
85
6SL3120- 1 T E28-5AA 1
0.81
42.6
0.926
67.6
0.206/1.823
210/463.05 1PH4 167- 4 . F 5 6
132
6SL3120- 1 T E31-3AA 0
0.83
41
0.928
67.6
0.220/1.947
240/529.2
132
6SL3120- 1 T E31-3AA 0
1PH4 168- 4 . F 5 6
Special versions:
Specify supplementary order code and plain text if applicable (see Options). –Z
Motor Module:
Single Motor Module
Double Motor Module
1)
n2: Max. permissible thermal speed at constant output or speed,
which is at the voltage limit when P = Prated.
2)
nS1: Max. permissible speed that is continuously permitted without
speed duty cycles.
3)
nmax: Maximum speed which must not be exceeded.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
1
2
1
0
4)
Standard design with duplex bearing.
The rated output current of the Motor Module is lower than the motor
rated current.
6) Speed is limited to lower values in some cases. The following restriction applies: Max. output frequency < 5 × motor rated frequency.
5)
23
Descrizione dei motori
1.4 Dati per la scelta e l'ordinazione
1.4.2
Dati per la scelta e l'ordinazione di macchine utensili
Speed, max.1)
Shaft
height
Rated
speed
Continuous speed,
max.
SH
nrated
nS1 cont.2) nS1 cont.3) nS1 cont.4) nmax2)
nmax3)
nmax4)
Rated power
for duty type
in accordance with IEC 60034-1
1PH4 asynchronous
motor
with solid shaft
Water cooling
Prated
Order No.
Standard type
S1
S6-60%
S6-40%
kW
(HP)
rpm
rpm
rpm
rpm
rpm
rpm
rpm
kW
(HP)
kW
(HP)
100
1500
5600
6500
10000
7500
9000
12000
7.5 (10.1)
11 (14.8)
14 (18.8)
8.75 (11.7) 10 (13.4)
1PH4103 - 4 F26
12.75 (17.1) 14.75 (19.8) 1PH4105 - 4 F26
16.25 (21.8) 18.75 (25.1) 1PH4107 - 4 F26
132
1500
5200
6000
9250
6700
8000
10000
15 (20.1)
22 (29.5)
27 (36.2)
30 (40.2)
18 (24.1)
26.5 (35.5)
32.5 (43.6)
36 (48.3)
21 (28.2)
31 (41.6)
38 (51.0)
42 (56.3)
1PH4133 - 4
1PH4135 - 4
1PH4137 - 4
1PH4138 - 4
160
1500
4000
4500
7000
5300
6500
8000
37 (49.6)
46 (61.7)
52 (69.7)
45 (60.3)
55 (73.8)
62.5 (83.8)
52.5 (70.4)
65 (87.2)
73 (97.9)
1PH4163 - 4 F26
1PH4167 - 4 F26
1PH4168 - 4 F26
F26
F26
F26
F26
Encoder systems for Absolute encoder EnDat, 2048 S/R (Encoder AM2048S/R)
Incremental encoder sin/cos 1 Vpp 2048 S/R with C and D track (Encoder IC2048S/R)
motors without
Incremental encoder sin/cos 1 Vpp 2048 S/R without C and D track (Encoder IN2048S/R)
DRIVE-CLiQ
interface:
E
M
N
Encoder systems for Absolute encoder 22 bit single-turn + 12 bit multi-turn (Encoder AM22DQ)
Incremental encoder 22 bit with 11 bit commutation position (Encoder IC22DQ)
motors with
DRIVE-CLiQ
Incremental encoder 22 bit (Encoder IN22DQ)
interface:
F
D
Q
1)
For continuous duty (with 30% nmax, 60% 2/3 nmax, 10% standstill)
for a duty cycle time of 10 min.
2)
Bearing version for duplex bearing.
Bearing version for single bearing.
4) Bearing version for increased speed using option L37.
3)
24
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Descrizione dei motori
1.4 Dati per la scelta e l'ordinazione
Motor type
(continued)
Rated torque Moment of
inertia
Mrated
Weight,
approx.
J
m
Rated current for duty type
in accordance with IEC 60034-1
Irated
S1
S6-60%
S6-40%
A
A
A
SINAMICS S120 Motor Module
Required
rated output
current
Booksize format
Irated
Order No.
S1
Nm
(lbƒ -ft)
kgm2
(lbƒ -in-s2)
kg
(lb)
1PH4103 - ...
1PH4105 - ...
1PH4107 - ...
48 (35.4)
70 (51.6)
90 (66.4)
0.017 (0.15)
0.024 (0.21)
0.031 (0.27)
52 (115)
67 (148)
80 (176)
26
38
46
29
42
52
32
47
58
30
45
60
6SL312
6SL312
6SL312
- 1TE23-0AA3
- 1TE24-5AA3
- 1TE26-0AA3
1PH4133 - ...
1PH4135 - ...
1PH4137 - ...
1PH4138 - ...
95 (70.1)
140 (103)
170 (125)
190 (140)
0.046 (0.41)
0.071 (0.63)
0.085 (0.75)
0.097 (0.86)
90 (198)
112 (247)
130 (287)
150 (331)
55
73
85
102
65
86
100
119
74
99
114
136
60
85
85
132
6SL312
6SL312
6SL312
6SL312
- 1TE26-0AA3
- 1TE28-5AA3
- 1TE28-5AA3
- 1TE31-3AA3
1PH4163 - ...
1PH4167 - ...
1PH4168 - ...
235 (173)
293 (216)
331 (244)
0.17 (1.50)
0.206 (1.82)
0.22 (1.95)
175 (386)
210 (463)
240 (529)
107
120
148
125
138
173
142
158
197
132
132
200
6SL312
6SL312
6SL312
- 1TE31-3AA3
- 1TE31-3AA3
- 1TE32-0AA3
Cooling:
Internal air cooling
External air cooling
0
1
Motor Module:
Single Motor Module
1
Notes on water cooling
Motor
type
Coolant flow rate
(water)
Connecting thread on
non-drive end (NDE)
1PH410
6 l/min
G 1/4
1PH413
8 l/min
G 3/8
1PH416
10 l/min
G 1/2
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
25
Descrizione dei motori
1.5 Targhetta dei dati tecnici (targhetta identificativa)
1.5
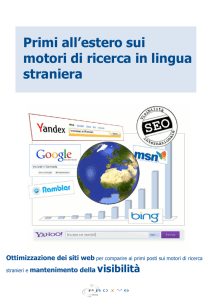
Targhetta dei dati tecnici (targhetta identificativa)
La targhetta dei dati tecnici (targhetta identificativa) riporta i dati tecnici validi per il motore
fornito.
6,(0(16
a0RW
,0
1R<)
0/)% /
,3
8 19
&OLVRODP
3 1N: , 1$
1GLVHULH 7HVWR=RQD([79
7HVWR=RQD([
I 1+] Q 1JLULPLQ
&2'(
&RSSLDPD[
&RUUHQWHPD[ 6HQVRUHWHPS
7LSRGLUDIIUHGGDPHQWR 2S]LRQL
3UHVVLRQHGLVLVWHPD 6SHFLILFDGHOFOLHQWH Q PD[JLULPLQ
&(
)UHQR
(1
7DFKLPHWURbUHVROYHU 3RUWDWD
%DUFRGH
0/)%GHO
PRWRUH
.7PD[ 5LVFDOGDPHQWRDQWLFRQGHQVD P
NJ
6LHPHQV$*$XWRPDWLRQ'ULYHV
0DGHLQ*HUPDQ\
8 ,1 >9@SHUPRWRULVLQFURQL
FRV ϕ SHUPRWRULDVLQFURQL
Figura 1-2
26
,FDPSLSRVVRQRDQFKHHVVHUHYXRWLRS]LRQL
Schema di principio della targhetta dei dati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Descrizione dei motori
1.5 Targhetta dei dati tecnici (targhetta identificativa)
Tabella 1- 4
Elementi sulla targhetta dati
N.
Descrizione
N.
Descrizione
010
Sigla di ordinazione (MLFB)
170
Velocità nominale nN (2)
012
Numero progressivo, parte del numero di serie
180
Modo operativo (2)
020
Numero di serie
185
Codice punto operativo 2
025
Marchio UL
190
Tensione nominale UN (3)
026
Simbolo della zona 2
191
Tipo di circuito 3
030
Forma costruttiva
200
Corrente nominale IN (3)
035
Marchio della zona 2
210
Potenza nominale PN (3)
036
Protezione antideflagrante
220
cos φ (3)
040
Grado di protezione
230
Frequenza nominale fN (3)
045
Tipo di equilibratura
240
Velocità nominale nN (3)
per motori asincroni: cos φ
250
Modo operativo (3)
per motori sincroni: tensione indotta UIN
255
Codice punto operativo 3
049
050
Tensione nominale UN (1)
Corrente massima Imax
051
Tipo di circuito 1
270
Coppia massima Mmax
060
Corrente nominale IN (1)
275
Velocità massima nmax
070
Potenza nominale PN (1)
280
Sensore di temperatura
080
cos φ (1)
285
Tachimetro o resolver
090
Frequenza nominale fN (1)
290
Tipo di raffreddamento
100
Velocità nominale nN (1)
295
Portata l/min (m3/s)
110
Modo operativo (1)
296
Pressione di sistema
115
Codice punto operativo 1
297
Temperatura massima del mezzo refrigerante
120
Tensione nominale UN (2)
298
Opzioni (I)
121
Tipo di circuito 2
315
Opzioni (II)
130
Corrente nominale IN (2)
320
Indicazione opzionale del cliente
140
Potenza nominale PN (2)
325
Riscaldamento anticondensa
150
cos φ (2)
330
Peso
160
Frequenza nominale fN (2)
335
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
27
Descrizione dei motori
1.5 Targhetta dei dati tecnici (targhetta identificativa)
28
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
2
Progettazione
2.1
Software di progettazione
2.1.1
Tool di progettazione SIZER
Panoramica
Figura 2-1
SIZER
La progettazione confortevole delle famiglie di azionamenti SINAMICS e MICROMASTER 4
nonché quella dei controllori numerici CNC SINUMERIK solution line e dei controlli numerici
Motion Control SIMOTION si esegue con il tool di progettazione SIZER. Questo tool fornisce
un supporto per il dimensionamento tecnico dei componenti hardware e firmware necessari
per un compito di azionamento. SIZER comprende la progettazione del sistema di
azionamento completo e consente la gestione non solo di semplici azionamenti singoli ma
anche di quelli complessi multiasse.
SIZER supporta tutte le fasi della progettazione in un workflow:
● Progettazione dell'alimentazione da rete
● Dimensionamento dei motori e dei riduttori, compreso il calcolo degli elementi meccanici
di trasmissione
● Progettazione dei componenti dell'azionamento
● Elencazione degli accessori necessari
● Scelta delle opzioni di performance lato rete e lato motore
Nella realizzazione di SIZER è stata data particolare rilevanza alla semplicità di utilizzo e alla
funzionalità complessiva orientata ai compiti relativi agli azionamenti. Una guida utente
completa facilita l'approccio al tool. Informazioni di stato visualizzano in ogni momento lo
stato d'avanzamento della progettazione.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
29
Progettazione
2.1 Software di progettazione
La superficie operativa di SIZER è realizzata in lingua tedesca e inglese. La configurazione
dell'azionamento viene memorizzata in un progetto. Le funzioni ed i componenti utilizzati
sono rappresentati in una struttura ad albero in base alla loro correlazione. La
rappresentazione d'insieme del progetto consente la progettazione di sistemi d'azionamento
nonché la copiatura/l'immissione/la modifica di azionamenti già progettati.
Risultati della progettazione sono:
● Lista dei componenti necessari (Export in Excel)
● Dati tecnici del sistema
● Caratteristica
● Descrizione delle ripercussioni in rete
● Rappresentazione dei componenti dell'azionamento e del controllo e disegni quotati dei
motori
Questi risultati sono visualizzati in un albero dei risultati e possono essere utilizzati anche a
scopo di documentazione. Quale supporto per l'utente è disponibile un online-help
tecnologico, che fornisce le seguenti informazioni:
● dati tecnici dettagliati
● informazioni sui sistemi d'azionamento e sui relativi componenti
● criteri decisionali per la scelta dei componenti.
Requisiti minimi del sistema
● PG oppure PC con Pentium™ II 400 MHz (Windows™ 2000), Pentium™ III 500 MHz
(Windows™ XP)
● RAM da 256 Mbyte (consigliata RAM da 512 Mbyte)
● Almeno 1,7 Gbyte di memoria libera su disco rigido
● 100 Mbyte di memoria libera aggiuntiva sull'unità di sistema di Windows
● risoluzione del monitor 1024 x 768 pixel
● Windows™ 2000 SP2, XP Professional SP1, XP Home Edition SP1
● Microsoft Internet Explorer 5.5 SP2
Numeri di ordinazione per SIZER
Tool di progettazione
Numero di ordinazione (MLFB)
SINAMICS MICROMASTER SIZER
6SL3070-0AA00-0AG0
tedesco/inglese
30
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Progettazione
2.1 Software di progettazione
2.1.2
Software di azionamento/di messa in servizio STARTER
Il software di azionamento e messa in servizio, di semplice utilizzo, STARTER offre
● la messa in servizio,
● l'ottimizzazione e
● la diagnosi
È possibile trovare una descrizione al seguente indirizzo Intranet:
http://mall.automation.siemens.com
Selezionare il Paese e quindi la voce "Products" dal menu.
Nel Navigator scegliere "Drive Technology" → "Engineering software" → "STARTER
drive/commissioning software"
Eseguire il download dall'indirizzo http://support.automation.siemens.com
2.1.3
Tool di messa in servizio SinuCom
Il software di messa in servizio, di facile utilizzo, per PC/PG è utile per la messa in servizio
ottimale degli azionamenti con SINAMICS S120/SIMODRIVE 611 digital. È possibile trovare
una descrizione al seguente indirizzo Intranet:
https://mall.automation.siemens.com
Selezionare il Paese desiderato e quindi la voce "Prodotti" nella barra dei menu.
Nel Navigatore selezionare "Sistemi di automazione" → "Sistemi di automazione CNC
SINUMERIK" → "Software HMI per controlli CNC" → "Tools" → "SinuCom".
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
31
Progettazione
2.2 Procedura di progettazione
2.2
Procedura di progettazione
Motion Control
I servoazionamenti sono ottimizzati per svolgere compiti di movimentazione. Essi eseguono
movimenti lineari o rotanti nell'ambito di un ciclo di lavoro predefinito. Tutte le
movimentazioni devono essere eseguite in modo ottimale dal punto di vista temporale.
I servoazionamenti devono pertanto soddisfare le seguenti esigenze:
● elevata dinamica, cioè tempi di risposta brevi
● sovraccaricabilità, cioè elevata riserva di accelerazione
● ampio campo di regolazione, cioè elevata risoluzione per posizionamenti precisi.
La seguente tabella "Procedura di progettazione" vale per motori sincroni e asincroni.
Procedura generale per la realizzazione di un progetto
La base della progettazione è costituita dalla descrizione funzionale della macchina. La
definizione dei componenti è legata alle performance richieste e viene di solito eseguita nelle
seguenti fasi:
32
Passo
Descrizione delle attività di progettazione
1.
Chiarimenti sul tipo di azionamento
2.
Definizione delle condizioni al contorno e integrazione nell'automazione
3.
Definizione del carico, calcolo della coppia max. di carico e definizione del
motore
4.
Definizione del SINAMICS Motor Module
5.
Ripetizione delle fasi 3 e 4 per altri assi
6.
Calcolo della potenza del circuito intermedio necessaria e definizione del
SINAMICS Line Module
7.
Definizione delle opzioni di potenza lato rete (interruttore principale, fusibili,
filtri di rete ecc.)
8.
Definizione delle performance di regolazione necessarie e scelta della
Control Unit, definizione del cablaggio dei componenti
9.
Definizione di ulteriori componenti del sistema (ad es. resistenze di
frenatura)
10.
Calcolo del fabbisogno di corrente per l'alimentazione a 24 V DC dei
componenti e definizione degli alimentatori (apparecchi SITOP, Control
Supply Module)
11.
Definizione dei componenti per la tecnica di collegamento
12.
Struttura dei componenti del gruppo di azionamento
13.
Calcolo delle sezioni necessarie dei cavi per il collegamento della rete e dei
motori
14.
Osservare gli spazi liberi da rispettare nel montaggio del sistema
Vedere il
capitolo
successivo.
Vedere il
catalogo
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Progettazione
2.3 Selezione e definizione dei motori asincroni
2.3
Selezione e definizione dei motori asincroni
2.3.1
Chiarimenti sul tipo di azionamento
La scelta del motore avviene sulla base della coppia necessaria che è definita dal tipo di
impiego come p.es. azionamenti di nastri trasportatori, di piattaforme di sollevamento, per
banchi prova, per centrifughe, per acciaierie e cartiere, di avanzamento o per mandrini. Si
devono inoltre tenere in considerazione i riduttori per la trasmissione del movimento o per
adattare la velocità del motore e la sua coppia alle caratteristiche del carico.
Per il calcolo della coppia che il motore deve fornire devono essere noti, oltre alla coppia di
carico che è definita dal tipo di applicazione, anche i seguenti dati meccanici:
● Masse movimentate
● Diametro della ruota motrice
● passo della vite, rapporto di trasmissione
● Indicazioni sulle resistenze d'attrito
● Rendimento meccanico
● Corse di movimentazione
● Velocità massima
● Accelerazione e decelerazione massima
● Tempo di clock.
2.3.2
Definizione delle condizioni al contorno e integrazione nell'automazione
Fondamentalmente occorre decidere se si devono utilizzare motori sincroni o asincroni.
I motori sincroni sono da preferirsi in caso di spazi di installazione ridotti e momento d'inerzia
del rotore contenuto e quindi dinamica elevata (tipo di regolazione "Servo").
Con i motori asincroni si raggiungono elevate velocità massime nell'area di deflussaggio del
campo. I motori asincroni sono disponibili anche per potenza più elevata.
Nella progettazione occorre tener presente tra l'altro:
● Il tipo di rete per l'impiego di determinati tipi di motore e/o i filtri di rete per reti IT (reti non
messe a terra).
● L'utilizzo del motore secondo i valori nominali per la sovratemperatura degli avvolgimenti
di 60 K o 100 K.
● Le temperature ambiente e l'altitudine di installazione dei motori e dei componenti
dell'azionamento.
● Deflusso del calore dei motori tramite raffreddamento naturale, ventilazione forzata o
raffreddamento ad acqua.
Ulteriori condizioni al contorno dipendono dall'integrazione dell'azionamento in un ambiente
di automazione come SIMATIC o SIMOTION.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
33
Progettazione
2.3 Selezione e definizione dei motori asincroni
Per funzioni Motion Control e tecnologiche (ad es. posizionamento) e per quelle di
sincronismo si utilizza il relativo sistema di automazione ad es. SIMOTION D.
L'integrazione dell'azionamento nel sistema di automazione sovraordinato avviene tramite
PROFIBUS.
2.3.3
Selezione dei motori asincroni
Durante la scelta del motore asincrono adeguato è necessario distinguere essenzialmente 3
casi di applicazione:
Caso 1:
Il motore ha un funzionamento prevalentemente continuo.
Caso 2:
Un ciclo di carico periodico determina il dimensionamento dell'azionamento.
Caso 3:
È necessario un settore ad indebolimento del campo elevato.
Lo scopo è quello di trovare punti di lavoro caratteristici per la coppia e la velocità sulla base
dei quali si possa definire il motore in base al caso di applicazione.
Dopo aver definito il caso di applicazione e le relative specifiche, si calcola la coppia
massima del motore stesso. In generale questa si ricava durante la fase di accelerazione.
Qui si sommano la coppia di carico e la coppia necessaria per accelerare il motore.
Al termine avviene una verifica della coppia massima del motore con le curve caratteristiche
limite del motore.
Nella definizione del motore si devono considerare i seguenti criteri:
● Mantenimento dei limiti dinamici cioè tutti i punti coppia-velocità del carico devono
trovarsi al di sotto delle curve caratteristiche limite rilevanti.
● I limiti termici devono essere rispettati, ossia la coppia motore effettiva alla velocità media
del motore calcolata sulla base del ciclo di carico deve trovarsi al di sotto della curva
caratteristica S1 (funzionamento continuo). Il valore effettivo della corrente del motore in
un ciclo di carico deve essere inferiore alla corrente nominale.
● Nel campo di deflussaggio la coppia motore ammessa è limitata dalla curva caratteristica
del limite di tensione (limite di inversione di coppia). In questo caso si deve rispettare una
distanza del 30 %.
2.3.4
Il motore ha un funzionamento continuo
Deve essere selezionato il seguente motore: PN, motore ≥ Pnecessario
La definizione del sovraccarico (ad es. all'avviamento) avviene sulla base di periodi molto
brevi. La coppia di picco deve essere inferiore al limite di inversione di coppia.
Inoltre occorre verificare che la potenza sia disponibile nel campo del numero di giri
desiderato. In caso contrario si deve scegliere un motore più grosso o un'altra esecuzione
dell'avvolgimento.
34
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Progettazione
2.3 Selezione e definizione dei motori asincroni
2.3.5
Il motore funziona in un ciclo di carico periodico
Il ciclo di carico determina il dimensionamento dell'azionamento. È indispensabile che
durante il ciclo di carico le velocità siano inferiori alla velocità nominale.
Se si conosce il valore della potenza ma non quello delle coppie durante il ciclo di carico, la
potenza può essere convertita in una coppia mediante la seguente relazione:
M = P ∙ 9550 / n
M in [Nm], P in [kW], n in [1/min]
La coppia che il motore applica è costituita dalla coppia di frizione Mfrizione, dalla coppia
sottocarico della macchina di produzione Mcarico e dalla coppia di accelerazione MB:
M = Mfrizione + Mcarico + MB
La coppia di accelerazione MB si calcola con la seguente formula:
0
%
ෙQ
˭
ವ-ವ
PRWRUHFDULFR
W%
-ವෙQ
PRWRUHFDULFR
ವW
MB
La coppia di accelerazione in Nm si riferisce all'albero motore (dal lato
motore)
Jmotore+carico
Coppia di inerzia totale in kgm2 (dal lato motore)
Δn
Modifica della velocità in 1/min
tB
Tempo di accelerazione in s
0
0
0 PD[FLFOR
0
0
0
W
0
W
W
W
W
W
7
Figura 2-2
Ciclo di carico periodico (esempio)
La coppia effettiva Meff deve essere calcolata a partire dal ciclo di carico:
0
HII
0t෬W0t෬W
7
In base al periodo T e alla costante di tempo termica dipendente dall'altezza dell'asse Tth del
motore è necessario distinguere:
● T/Tth ≤ 0,1 (per periodi di durata compresa tra 2 e 4 min)
● 0,1 ≤ T/Tth ≤ 0,1 (per periodi di durata compresa tra 3 e 20 min)
● T/Tth > 0,5 (per periodi di durata di circa 15 min)
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
35
Progettazione
2.3 Selezione e definizione dei motori asincroni
Scelta del motore
Tabella 2- 1
Scelta del motore in funzione della durata del periodo e della costante termica di tempo
Durata periodo
Scelta del motore
T/Tth ≤ 0,1 (periodi di durata compresa tra 2 e 4 min)
Deve essere scelto un motore con la seguente coppia
nominale MN:
MN > Meff e Mmax (ciclo) < 2 MN
0,1 ≤ T/Tth ≤ 0,5 (periodi di durata compresa tra 3 e 20 min)
Deve essere scelto un motore con la seguente coppia
nominale MN:
0!
1
T/Tth > 0,5 (per periodi di durata di circa 15 min)
0HII
ຘ 7
7WK
H0PD[FLFOR
01
Se durante il ciclo di carico si verificano coppie MN più
lunghe di 0,5 Tth deve essere scelto un motore con la
seguente coppia nominale: MN > Mmax (ciclo).
Selezione Motor Module
Nelle curve caratteristiche velocità-potenza sono indicate le correnti richieste in caso di
sovraccarico (potenze per S6-25%, S6-40%, S6-60%). È possibile interpolare i valori
intermedi.
36
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Progettazione
2.3 Selezione e definizione dei motori asincroni
2.3.6
Necessario maggiore settore ad indebolimento del campo
Per le applicazioni con un settore ad indebolimento del campo maggiore di quello dei motori
asincroni standard, è necessario procedere come indicato di seguito:
A partire dalla velocità massima nmax e dalla potenza richiesta Pmax deve essere scelto un
motore in grado di portare la potenza richiesta Pmax in questo punto di esercizio (nmax, Pmax).
Infine si deve controllare se il motore è in grado di generare la coppia o la potenza nella
velocità di riferimento richiesta dall'applicazione (nN, PN).
3>N:@
6
6
&XUYDFDUDWWHULVWLFDGHOOLPLWHGLWHQVLRQH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6
6
31
Q>USP@
Q PD[
Q1
0>1P@
6
6
6
01
6
&XUYDFDUDWWHULVWLFDGHOOLPLWHGLWHQVLRQH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
Q>USP@
Q1
Figura 2-3
Q PD[
Scelta del motore in base al diagramma potenza-numero di giri e coppia-numero di giri
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
37
Progettazione
2.3 Selezione e definizione dei motori asincroni
Esempio per il calcolo di nN
È richiesta una potenza definita Pmax = 8 kW con nmax = 5250 1/min.
Il settore a indebolimento del campo deve essere pari a 1 : 3,5.
Calcolo della velocità nominale richiesta nN: 5250 / 3,5 = 1500 1/min.
38
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
3
Caratteristiche meccaniche dei motori
3.1
Raffreddamento
Per i motori raffreddati ad acqua viene raggiunta un'elevata densità di potenza.
La geometria del canale di raffreddamento è realizzata il modo da smaltire in modo ottimale
il calore dissipato dello statore e una parte delle perdite del rotore.
Per il funzionamento è necessario un raffreddamento ad acqua con gruppo di
raffreddamento.
Liquidi di raffreddamento
Come liquidi di raffreddamento si possono utilizzare acqua oppure olii a bassa viscosità
(attenzione al derating).
Il liquido di raffreddamento deve soddisfare il seguente requisito: acqua con reazione
chimica neutrale, priva di residui solidi (acque chiare). Per ulteriori requisiti si rimanda alla
seguente tabella.
Tabella 3- 1
Requisiti chimici del liquido di raffreddamento
Contenuto e composizione chimica
Valore
Valore pH
6,0 ... 8,0
Ioni cloruro
< 40 ppm
Ioni solfato
< 50 ppm
Ioni nitrato
< 50 ppm
Sostanze in soluzione
< 340 ppm
Durezza totale
< 170 ppm
Conducibilità elettrica
< 500 μS/cm
Dimensione delle particelle eventualmente presenti
max. 100 μm
Al liquido devono essere aggiunta una quantità sufficiente di additivi per la protezione contro
la corrosione e per rallentare la formazione di alghe. Per il tipo e la quantità di additivo fare
riferimento alle rispettive raccomandazioni dei produttori di questi additivi (vedere la tabella)
e alle condizioni ambientali.
Se si utilizza ad esempio il liquido Tyfocor (ditta Tyforop Chemie GmbH), si deve procedere
a una diluizione nel rapporto di 75% di acqua e 25% di liquido anticorrosivo.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
39
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
Tabella 3- 2
Produttori di additivi chimici
Ditta
Tel. / telefax
Internet / e-mail
Tyforop Chemie GmbH
Tel.: +49 (0)40 / 20 94 97-0
www.tyfo.de
Anton-Rée-Weg 7, D-20537 Hamburg
Fax: +49 (0)40 / 61 52 99
[email protected]
Clariant Produkte Deutschland GmbH
Tel.: +49 (0)8679 / 7-2272
Fax: +49 (0)8679 / 7-5085
www.antifrogen.de
Cimcool Industrial Products
Tel.: +31 10 / 460 06 60
www.cimcool.net
Schiedamsedijek 20, 3134 KK Vlaardingen
Fax: +31 10 / 460 32 40
[email protected]
FUCHS PETROLUB AG
Tel.: +49 (0)621 / 38 02-0
www.fuchs–oil.com
Friesenheimer Straße 17, D-68169 Mannheim
Fax: +49 (0)621 / 3802 - 190
[email protected]
hebro chemie GmbH
Tel.: +49 (0)2166 / 6009–0
www.hebro–chemie.de
Rostocker Straße 40, D-41199 Mönchengladbach
Fax: +49 (0)621 / 3802
[email protected]
HOUGHTON Deutschland GmbH
Tel.: +49 (0)2408 / 1406 - 0
www.houghton.de
Werkstraße 26, D-52076 Aachen-Oberforstbach
Fax: +49 (0)2408 / 1406 - 20
Nalco Deutschland GmbH
Tel.: +49 (0)7141 / 70 30
Steinbeisstraße. 20-22, D-71691 Freiberg
Fax: +49 (0)7141 / 178
Werk Gendorf, Hr. Dr. Michael Waidelich,
R&D, Bau 300, D-84504 Burgkirchen
www.nalco.com
Nota
I prodotti sopra consigliati sono prodotti di altre Case di cui conosciamo l'idoneità di
massima. Naturalmente si possono utilizzare prodotti di ulteriori fornitori con caratteristiche
analoghe. Consigliando questi prodotti intendiamo essere di aiuto e non imporne la scelta.
Siemens non si assume alcuna responsabilità per la qualità dei prodotti di terze parti.
Se si utilizzano altri liquidi di raffreddamento (ad es. olio), si devono tenere presenti i
seguenti dati e richieder alla più vicina rappresentanza Siemens la riduzione della potenza
del motore:
Densità
ρ
[kg/m3]
Capacità calorifica specifica
cρ
[J/(kg•K)]
Viscosità cinematica
ν
[m2/s]
Portata
ν
[l/min]
Nota
In caso di miscela acqua-olio con una percentuale di olio inferiore al 10% non è ancora
necessario ridurre la potenza del motore. Il liquido di raffreddamento deve essere pulito o
filtrato per evitare l'ostruzione del circuito di raffreddamento.
40
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
Temperatura in ingresso del liquido di raffreddamento
Per evitare la condensa, la temperatura del liquido refrigerante in ingresso deve essere più
elevata della temperatura ambiente.
Temperatura in ingresso del liquido refrigerante (consigliata): Traff ≥ Tamb – 2 K
Temperatura minima in ingresso del liquido refrigerante: Traff > Tamb – 5 K
I motori sono dimensionati secondo EN 60034-1 per il funzionamento con una temperatura
massima del liquido di raffreddamento di 30 °C nel rispetto di tutti i dati del motore. Se i
motori funzionano con temperature del liquido refrigerante maggiori, rispettare il fattore di
derating riportati nella tabella che segue:
Tabella 3- 3
Fattori di derating per la potenza nominale
Temperatura in ingresso del liquido di
raffreddamento
Fattore di derating
≤ 30 °C
40 °C
50 °C
60 °C
1,0
0,95
0,90
0,85
Pressione del liquido di raffreddamento
Pressione statica massima del liquido di raffreddamento
0,6 MPa (6,0 bar)
Caduta di pressione (si verifica automaticamente)
max. ca. 0,01 MPa (0,1 bar)
Potenza di raffreddamento da dissipare e flusso volumetrico del refrigerante
Tabella 3- 4
Potenza di raffreddamento da dissipare e flusso volumetrico del refrigerante
Motore
Flusso volumetrico di
raffreddamento
[l/min] ± 0,75
Potenza di
raffreddamento da
dissipare [W]
Collegamento
Pressione max.
Pressione [MPa]
1PH4103
6
1900
G 1/4"
0,6
1PH4105
6
2600
G 1/4"
0,6
1PH4107
6
3000
G 1/4"
0,6
1PH4133
8
2750
G 3/8"
0,6
1PH4135
8
3500
G 3/8"
0,6
1PH4137
8
4100
G 3/8"
0,6
1PH4138
8
4500
G 3/8"
0,6
1PH4163
10
4600
G 1/2"
0,6
1PH4167
10
5400
G 1/2"
0,6
1PH4168
10
6200
G 1/2"
0,6
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
41
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
Materiali nel circuito di raffreddamento
Nel circuito di raffreddamento vengono utilizzati EN-GJL-200 e una lega in alluminio.
Non impiegare metalli non ferrosi nel circuito di raffreddamento.
CAUTELA
Il materiale del dissipatore di calore non è resistente all'acqua di mare. Pertanto non deve
essere raffreddato direttamente con acqua di mare.
Se esiste il pericolo di congelamento, è necessario adottare misure specifiche per
l'esercizio, l'immagazzinaggio e il trasporto, ad es. spurgo e pulizia con aria compressa,
riscaldamento supplementare per i canali di raffreddamento.
Dispositivi di raffreddamento
Per garantire una temperatura in ingresso del liquido refrigerante di +30 °C occorre utilizzare
un gruppo di raffreddamento. Il funzionamento di più motori collegati ad un unico gruppo di
raffreddamento è ammesso.
I gruppi di raffreddamento non sono compresi nella fornitura dei motori. Nel relativo catalogo
è possibile reperire gli indirizzi di una serie di produttori di gruppi di raffreddamento.
*UXSSRGLUDIIUHGGDPHQWR
0RWRUH
)LOWUR
,QGLFDWRUHGLSRUWDWD
9DOYRODGLUHJROD]LRQH
GHOODSRUWDWD
3RPSD
6HUEDWRLRGHOO
DFTXDGL
UDIIUHGGDPHQWR
5LOHYDPHQWRGHOODWHPSHUDWXUD
GHOO
DFTXDGLUDIIUHGGDPHQWR
&RPSUHVVRUHb
bUHIULJHUDWRUH
4XHVWLFRPSRQHQWLQRQVRQRLQGLVSHQVDELOL
Figura 3-1
42
Circuito di raffreddamento
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Caratteristiche meccaniche dei motori
3.2 Grado di protezione
3.2
Grado di protezione
L'indicazione del grado di protezione secondo EN 60034-5 (IEC 60034-5) è riportata con le
due lettere IP seguite da due cifre (ad es. IP64).
IP = International Protection
1. Cifra = protezione contro i corpi estranei
2. Cifra = protezione contro la penetrazione di acqua
Poiché nelle macchine utensili e nelle macchine transfer vengono per lo più utilizzati
refrigeranti oleosi e/o aggressivi, la sola protezione contro l'acqua non è sufficiente. I motori
devono essere protetti con adeguate coperture.
Quando si sceglie il grado di protezione del motore occorre prestare attenzione a
un'adeguata tenuta dell'albero motore.
I motori 1PH4 sono realizzati con il grado di protezione IP65. All'estremità dell'albero i motori
presentano il grado di protezione IP55.
3.3
Esecuzione dei cuscinetti e durata utile
Impostazione predefinita
Cuscinetti doppi sul lato DE (cuscinetto a sfere scanalate e cuscinetto a rulli)
ATTENZIONE
I cuscinetti doppi non sono adatti per una trasmissione con giunto.
Varianti di cuscinetti
Tabella 3- 5
Varianti di cuscinetti
Applicazioni
Azionamento a cinghia
• Forza radiale minima necessaria
• per forze radiali elevate
Immagazzinaggio
DE
NDE
Standard:
Cuscinetti doppi
Uscita di accoppiamento o riduttore epicicloidale Opzione K00, (K02, K03):
• forze radiali ridotte ammesse
Cuscinetto semplice
Velocità massima incrementata
• Trasmissione senza forze radiali necessaria,
ad es. trasmissione con giunto
Opzione L37:
Cuscinetto semplice "cuscinetto
mandrino"
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
43
Caratteristiche meccaniche dei motori
3.3 Esecuzione dei cuscinetti e durata utile
Intervallo per la sostituzione dei cuscinetti (tLW) e per la sostituzione del grasso
I valori indicati nella tabella successiva sono validi per le seguenti condizioni:
● Cuscinetti semplici e doppi
● Temperatura dell'acqua di raffreddamento +30 °C
● Posizione di montaggio orizzontale
Tabella 3- 6
AH
Intervallo per la sostituzione dei cuscinetti
Cuscinetti doppi (standard)
Cuscinetto semplice (opzione K00)
Cuscinetti per n. di giri maggiorato
(Opzione L37)
100
nm < 2500
2500 < nm < 6000
nm < 4000
4000 < nm < 7000
nm ≤ 8000
8000 < nm < 12000
132
nm < 2000
2000 < nm < 5500
nm < 3500
3500 < nm < 6500
nm ≤ 6000
6000 < nm < 10000
160
nm < 1500
1500 < nm < 4500
nm < 3000
3000 < nm < 5000
nm ≤ 5000
5000 < nm < 8000
tLW [h]
16000
8000
20000
10000
16000
8000
nm = velocità media di funzionamento [giri/min]
tLW = intervallo per la sostituzione dei cuscinetti; intervallo per la sostituzione del grasso) = 0,8 • tLW
Velocità massima nmax e velocità massima in funzionamento continuativo ns1
La velocità massima nmax non deve essere superata. nmax non deve essere superata in modo
continuativo. Il numero di giri deve essere ridotto in base al ciclo seguente:
Ciclo di carico per un ciclo di 10 min
3 min
nmax
6 min
2/3 nmax
1 min
Condizione di fermo
CAUTELA
Se il numero di giri nmax viene superato possono verificarsi danni a cuscinetti, anelli di corto
circuito, accoppiamenti stabili, ecc. Pertanto occorre accertarsi che il numero di giri
impostato non superi il limite massimo, utilizzando un comando adeguato o attivando la
sorveglianza del numero di giri nel sistema di azionamento.
La velocità di esercizio in funzionamento continuativo nS1 è ammessa in modo continuativo
senza gioco di velocità. Questa velocità dipende dal tipo di cuscinetto e dall'altezza
dell'asse.
Tabella 3- 7
AH
44
Velocità massima e velocità massima in funzionamento continuativo ammesse
Cuscinetti doppi
[giri/min]
Cuscinetto semplice (opzione
K00)
[giri/min]
Cuscinetti per num. di giri aumentato (opzione L37)
[giri/min]
nmax
ns1
nmax
ns1
nmax
ns1
100
7500
5600
9000
6500
12000
10000
132
6700
5200
8000
6000
10000
9250
160
5300
4000
6500
4500
8000
7000
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Caratteristiche meccaniche dei motori
3.3 Esecuzione dei cuscinetti e durata utile
Nota
Se il motore viene fatto funzionare a velocità compresa tra ns1 e nmax, si presuppone un
gioco di velocità con velocità basse e fermi motore per garantire con sicurezza la
distribuzione del grasso nel cuscinetto.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
45
Caratteristiche meccaniche dei motori
3.4 Forza radiale (forza trasversale)
3.4
Forza radiale (forza trasversale)
Per garantire una marcia ottimale, non deve mai essere superata la forza radiale. Ad altezze
d'asse diverse è necessario non utilizzare forze inferiori alla forza minima. Questa può
essere desunta dai diagrammi delle forze radiali.
I diagrammi delle forze radiali indicano la forza radiale FR
● per diverse velocità di esercizio
● a seconda della durata dei cuscinetti
I diagrammi e le tabelle relativi alle forze sono validi solo per estremità DE standard
dell'albero. Per diametri di albero inferiori è possibile trasmettere solo forze radiali ridotte o
nulle. Per valori delle forze diverse da quelle riportate nei diagrammi, contattare la più vicina
rappresentanza Siemens.
ATTENZIONE
Se si utilizza l'opzione L37 (velocità aumentata), i motori sono adatti solo per il
funzionamento senza forze radiali.
Durante l'utilizzo di elementi di rinforzo della forza/coppia (ad esempio riduttori, freni) è
necessario garantire che le forze maggiori non siano caricate sul motore.
Quando si utilizzano elementi di trasmissione della forza che hanno come conseguenza
una sollecitazione radiale sull'estremità dell'albero, occorre fare attenzione a non superare i
valori limite massimi indicati nei diagrammi delle forze radiali.
Nelle applicazioni in cui i carichi radiali sono molto contenuti, l'albero del motore dovrà
essere caricato almeno con il valore minimo di forza radiale indicato nei diagrammi. Forze
radiali ridotte possono provocare un rotolamento non definito del cuscinetto a rulli cilindrici
e di conseguenza una durata utile più limitata. In questi casi sarà opportuno optare per il
cuscinetto semplice.
DImensionamento e calcolo della forza radiale FR per la trasmissione a cinghia
Nota
È necessario eseguire un dimensionamento accurato delle forze radiali dell'estremità
dell'albero secondo le direttive fornite dal produttore delle cinghie. La tensione delle cinghie
viene impostata con appositi apparecchi di misura.
Se il produttore delle cinghie non specifica il dimensionamento delle forze radiali, lo si può
determinare in base alla seguente formula:
FR = c • F U
46
FU = 2 • 107 • P / (n • D)
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Caratteristiche meccaniche dei motori
3.4 Forza radiale (forza trasversale)
Tabella 3- 8
Spiegazione dei simboli della formula
Simbolo della
formula
Unità
c
Descrizione
---
Fattore di pretensionamento; il fattore di pretensionamento è un valore
ricavato dall'esperienza dichiarato dal costruttore della cinghia. Per
approssimazione si possono considerare i seguenti valori:
per le cinghie trapezoidali: c = 1,5 ... 2,5
per cinghie speciali in materiale sintetico (cinghie piane) in funzione del
tipo di carico e di cinghia: c = 2,0 ... 2,5
FR
N
Forza radiale
FU
N
Forza periferica
P
kW
Prestazioni di emissione del motore
n
giri/min
Velocità motore
D
mm
Diametro della puleggia
1PH410⃞, cuscinetti doppi (standard)
Num. di giri max. per servizio continuativo
ns1 = 5600 1/min
Num. di giri max.
nmax = 7500 1/min
)5 >1@
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ Q PLQ )RU]DUDGLDOHPLQLPD
Figura 3-2
1)
[>PP@
Forza radiale ammessa FR alla distanza x dallo spallamento dell'albero con durata
nominale del cuscinetto di 20 000 h.
Ammessa per servizio continuativo, tuttavia durata di vita del cuscinetto ridotta
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
47
Caratteristiche meccaniche dei motori
3.4 Forza radiale (forza trasversale)
1PH410⃞, cuscinetto semplice (opzione K00)
Num. di giri max. per servizio continuativo
ns1 = 6500 1/min
Num. di giri max.
nmax = 9000 1/min
)5 >1@
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ Q PLQ
Figura 3-3
[ >PP@
Forza radiale ammessa FR alla distanza x dallo spallamento dell'albero con durata
nominale del cuscinetto di 20 000 h. 1)
)5 >1@
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ Figura 3-4
1)
48
)$ >1@
Forza radiale ammessa FR in funzione della forza assiale FA per una durata nominale del
cuscinetto di 20 000 h.
Ammessa per servizio continuativo, tuttavia durata di vita del cuscinetto ridotta
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Caratteristiche meccaniche dei motori
3.4 Forza radiale (forza trasversale)
1PH410⃞, cuscinetto semplice (opzione K00 con L37)
Num. di giri max. per servizio continuativo
ns1max = 10000 1/min
Num. di giri max.
nmax = 12000 1/min
) 5>1@
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ
Figura 3-5
1)
[ >PP@
Forza radiale ammessa FR alla distanza x dallo spallamento dell'albero con durata
nominale del cuscinetto di 10 000 h. 1)
Ammessa per servizio continuativo, tuttavia durata di vita del cuscinetto ridotta
)5 >1@
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ
Figura 3-6
)$ >1@
Forza radiale ammessa FR in funzione della forza assiale FA per una durata nominale del
cuscinetto di 10 000 h.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
49
Caratteristiche meccaniche dei motori
3.4 Forza radiale (forza trasversale)
1PH413⃞, cuscinetti doppi (standard)
Num. di giri max. per servizio continuativo
ns1 = 5200 1/min
Num. di giri max.
nmax = 6700 1/min
)5 >1@
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
)RU]DUDGLDOHPLQLPD
Figura 3-7
1)
50
[>PP@
Forza radiale ammessa FR alla distanza x dallo spallamento dell'albero con durata
nominale del cuscinetto di 20 000 h. 1)
Ammessa per servizio continuativo, tuttavia durata di vita del cuscinetto ridotta
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Caratteristiche meccaniche dei motori
3.4 Forza radiale (forza trasversale)
1PH413⃞, cuscinetto semplice (opzione K00)
Num. di giri max. per servizio continuativo
ns1 = 6000 1/min
Num. di giri max.
nmax = 8000 1/min
)5 >1@
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ Figura 3-8
[>PP@
Forza radiale ammessa FR alla distanza x dallo spallamento dell'albero con durata
nominale del cuscinetto di 20 000 h. 1)
)5 >1@
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ Figura 3-9
1)
)$ >1@
Forza radiale ammessa FR in funzione della forza assiale FA per una durata nominale del
cuscinetto di 20 000 h.
Ammessa per servizio continuativo, tuttavia durata di vita del cuscinetto ridotta
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
51
Caratteristiche meccaniche dei motori
3.4 Forza radiale (forza trasversale)
1PH413⃞, cuscinetto semplice (opzione K00 con L37)
Num. di giri max. per servizio continuativo
ns1 = 9250 1/min
Num. di giri max.
nmax = 10000 1/min
)5 >1@
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ
Figura 3-10
1)
[>PP@
Forza radiale ammessa FR alla distanza x dallo spallamento dell'albero con durata
nominale del cuscinetto di 10 000 h. 1)
Ammessa per servizio continuativo, tuttavia durata di vita del cuscinetto ridotta
)5 >1@
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ
Figura 3-11
52
)$ >1@
Forza radiale ammessa FR in funzione della forza assiale FA per una durata nominale del
cuscinetto di 10 000 h.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Caratteristiche meccaniche dei motori
3.4 Forza radiale (forza trasversale)
1PH416⃞, cuscinetti doppi (standard)
Num. di giri max. per servizio continuativo
ns1 = 4000 1/min
Num. di giri max.
nmax = 5300 1/min
)5 >1@
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ )RU]DUDGLDOHPLQLPD
Figura 3-12
1)
[>PP@
Forza radiale ammessa FR alla distanza x dallo spallamento dell'albero con durata
nominale del cuscinetto di 20 000 h.
Ammessa per servizio continuativo, tuttavia durata di vita del cuscinetto ridotta
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
53
Caratteristiche meccaniche dei motori
3.4 Forza radiale (forza trasversale)
1PH416⃞, cuscinetto semplice (opzione K00)
Num. di giri max. per servizio continuativo
ns1 = 4500 1/min
Num. di giri max.
nmax = 6500 1/min
)5 >1@
Q PLQ
Q PLQ
Q PLQ
Q PLQ
Q PLQ [ >PP@
Figura 3-13
Forza radiale ammessa FR alla distanza x dallo spallamento dell'albero con durata
nominale del cuscinetto di 20 000 h. 1)
)5 >1@
PLQ
PLQ
PLQ
PLQ
PLQ Figura 3-14
1)
54
)$ >1@
Forza radiale ammessa FR in funzione della forza assiale FA per una durata nominale del
cuscinetto di 20 000 h.
Ammessa per servizio continuativo, tuttavia durata di vita del cuscinetto ridotta
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Caratteristiche meccaniche dei motori
3.4 Forza radiale (forza trasversale)
1PH416⃞, cuscinetto semplice (opzione K00 con L37)
Num. di giri max. per servizio continuativo
ns1 = 7000 1/min
Num. di giri max.
nmax = 8000 1/min
)5 >1@
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ
Figura 3-15
1)
[>PP@
Forza radiale ammessa FR alla distanza x dallo spallamento dell'albero con durata
nominale del cuscinetto di 10 000 h. 1)
Ammessa per servizio continuativo, tuttavia durata di vita del cuscinetto ridotta
)5 >1@
PLQ
PLQ
PLQ
PLQ
PLQ
PLQ
Figura 3-16
)$ >1@
Forza radiale ammessa FR in funzione della forza assiale FA per una durata nominale del
cuscinetto di 10 000 h.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
55
Caratteristiche meccaniche dei motori
3.5 Forza assiale
3.5
Forza assiale
La forza assiale che agisce sul cuscinetto fisso è costituita dalla forza assiale esterna (ad
esempio riduttore con dentatura elicoidale, forze di lavorazione attraverso l'utensile), da una
forza di incidenza del cuscinetto e da un'eventuale forza peso del rotore per il montaggio
verticale del motore. Pertanto si ottiene una forza assiale massima in funzione della
direzione.
Ad esempio, in caso di impiego di ingranaggi a denti obliqui come elemento di azionamento,
oltre alla forza radiale sul cuscinetto del motore agisce anche una forza assiale. In presenza
di forze assiali può essere superata la taratura della molla del cuscinetto. Questa circostanza
deve essere evitata perché in tal caso la taratura del cuscinetto verrebbe aumentata e la sua
durata ridotta.
Calcolo della forza assiale FAZ ammessa
La forza assiale consentita in condizioni adeguate di esercizio FAZ viene determinata in base
alla posizione di montaggio del motore.
Tabella 3- 9
Calcolo della forza assiale ammessa:
Disposizione orizzontale
Estremità d'albero verso il basso
Estremità d'albero verso l'alto
)$=
)$=
)$=
)$= )$ )&
)$=
)$=
)$= )$ )&
)$= )$ ) / ) &
)$=
)$= ) / )&
FAZ
Forza assiale consentita in condizioni di esercizio adeguate
FA
Forza assiale consentita in funzione del numero di giri medi disponibile
FC
Forza elastica
FL
Forza-peso del rotore
56
)$= )$ ) / )&
)$= )& )/
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Caratteristiche meccaniche dei motori
3.6 Estremità dell'albero e equilibratura
Forze del peso del rotore
Tabella 3- 10 Forza-peso e forza di regolazione della molla del rotore
Tipo di motore
FL in [N]
FC in [N]
1PH4103
1PH4105
1PH4107
125
155
205
320
320
320
1PH4133
1PH4135
1PH4137
1PH4138
215
305
365
445
360
360
360
360
1PH4163
1PH4167
1PH4168
500
590
665
520
520
520
I valori indicati valgono solo per estremità d'albero lato DE standard; in caso di dimensioni
dell'estremità d'albero lato DE non standard, i carichi di forza ammessi saranno stabiliti caso
per caso. Per valori delle forze diverse da quelle riportate nei diagrammi, contattare la più
vicina rappresentanza Siemens.
Tabella 3- 11 Forze assiali nei cuscinetti doppi (standard)
Tipo di motore
Forza assiale max. ammessa in funzione del numero di giri
1PH410⃞-4
1PH413⃞-4
1PH416⃞-4
3.6
Num. di giri n [giri/min]
1500
2000
3000
4000
5000
6000
7500
Forza assiale FA [N]
1440
1270
1050
920
830
760
690
Num. di giri n [giri/min]
1500
2000
3000
4000
5000
6700
–
Forza assiale FA [N]
1520
1330
1090
950
850
730
–
Num. di giri n [giri/min]
1500
2000
3000
4000
5300
–
–
Forza assiale FA [N]
2080
1830
1520
1340
1180
–
–
Estremità dell'albero e equilibratura
L'estremità dell'albero sul lato DE è realizzata in modo cilindrico secondo DIN 748 parte 3,
IEC 60072-1. Per rapidi processi di accelerazione e funzionamento reversibile è preferibile
optare per un accoppiamento dinamico albero-mozzo.
Standard:
Con scanalatura per chiavetta e chiavetta (equilibratura con chiavetta
intera)
Albero pieno AH 100
Opzioni:
Campo di tolleranza k6
Albero pieno AH 132
Campo di tolleranza k6
Albero pieno AH 160
Campo di tolleranza m6
K42 = albero liscio
L69 = equilibratura con mezza chiavetta
L'equilibratura dei motori è certificata secondo DIN ISO 8821.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
57
Caratteristiche meccaniche dei motori
3.7 Concentricità, coassialità e planarità
3.7
Concentricità, coassialità e planarità
Tolleranza di concentricità, precisione dell'albero e della flangia (coassialità ed eccentricità
assiale) secondo IEC 60072.
Tabella 3- 12 Tolleranza di concentricità dell'albero all'asse della custodia (riferita alle estremità
d'albero cilindriche)
Altezza asse [mm]
Classe di tolleranza N
Classe di tolleranza R
100
0,05 mm
0,025 mm
132
0,05 mm
0,025 mm
160
0,06 mm
0,03 mm
&RPSDUDWRUH
$OEHURPRWRUH
/
/
0RWRUH
Figura 3-17
Controllo concentricità
Tabella 3- 13 Tolleranza della coassialità e della planarità della flangia rispetto all'asse d'albero (riferita
al diametro di centraggio della flangia di fissaggio)
Altezza asse [mm]
Classe di tolleranza N
Classe di tolleranza R
100
0,1 mm
0,05 mm
132
0,125 mm
0,063 mm
160
0,125 mm
0,063 mm
9HULILFD&RDVVLDOLW¢
$OEHURPRWRUH
&RPSDUDWRUH
PP
0RWRUH
$OEHURPRWRUH
9HULILFD3ODQDULW¢
&RPSDUDWRUH
PP
0RWRUH
Figura 3-18
58
Controllo coassialità ed planarità
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Caratteristiche meccaniche dei motori
3.8 Grado di vibrazione
3.8
Grado di vibrazione
I motori 1PH4 soddisfano un grado di vibrazione di livello A secondo EN 60034-14 (IEC
60034-14).
I valori di vibrazione indicati si riferiscono al solo motore. Le vibrazioni del sistema dovute
all'installazione possono causare un aumento di questi valori per il motore.
I motori mantengono la grandezza di oscillazione fino alla velocità nominale nN.
3HUPLVVLEOHYLEUDWLRQUDWH
9HII >PPV@
JUDGH1
JUDGH5
JUDGH6
Figura 3-19
JUDGH65
*B'B(1B
>USP@
Gradi di vibrazione per altezze d'asse da 100 a 132
Permissible vibration rate
9HII >PPV@
JUDGH5
JUDGH6
JUDGH65
Figura 3-20
3.9
>USP@
Gradi di vibrazione per altezza d'asse 160
Verniciatura
I motori sono forniti con verniciatura standard antracite (RAL 7016).
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
59
Caratteristiche meccaniche dei motori
3.9 Verniciatura
60
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
4
Dati tecnici e curve caratteristiche
4.1
Funzionamento e caratteristiche
È disponibile una coppia costante MN dalla condizione di motore fermo al raggiungimento di
un punto di riferimento (punto nominale). Dal punto nominale inizia il campo di potenza
costante (vedere la curva caratteristica P/n). I motori asincroni dispongono di una notevole
capacità di sovraccarico nel campo della potenza costante. Per alcuni motori asincroni la
capacità di sovraccarico viene ridotta nel campo del numero di giri massimo.
All'aumentare del numero di giri, quindi nel campo della potenza costante, per il calcolo della
coppia massima disponibile Mmax per un determinato numero di giri n con l'approssimazione
più precisa possibile viene applicata la formula:
0>1P@
PD[
3>N:@෬
PD[
Q>JLULPLQ@
3>N:@
෬31
PD[
Se si utilizza il mandrino, il campo di potenza costante è particolarmente significativo per le
lavorazioni con capacità di truciolatura costante. Lo sfruttamento ottimale consente di ridurre
la potenza necessaria per il convertitore.
I valori limite e le curve caratteristiche seguenti valgono in linea di principio per tutti i motori
asincroni alimentati tramite convertitore.
30
3XQWR
QRPLQDOH
&XUYDFDUDWWHULVWLFDGHOOLPLWHGLWHQVLRQH
6
/LPLWHQGLJLUL
PHFFDQ
6
6
6
Q>PLQ@
Q1
Figura 4-1
QV
QPD[
Caratteristica di potenza, limite e curve caratteristiche; andamento della coppia del
motore
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
61
Dati tecnici e curve caratteristiche
4.1 Funzionamento e caratteristiche
Dati di potenza per i tipi di funzionamento S1 e S6
Tutti i dati tecnici dei motori asincroni si riferiscono al funzionamento continuo e
corrispondono al tipo di funzionamento S1.
In molte applicazioni tuttavia il tipo di funzionamento S1 non è indicato, ad es. con diversi
carichi elevati in funzione del tempo. In questo caso è possibile indicare una sequenza
sostitutiva, che rappresenti almeno una sollecitazione per il motore di tipo analogo.
Per tempi di accelerazione ridotti, momenti di urto o azionamenti con condizioni di
sovraccarico, nel ciclo da 60 secondi sono disponibili correnti istantanee o correnti di punta.
L'intensità e la progettazione precisa di tali correnti sono riportate nella documentazione dei
relativi moduli di potenza del convertitore o del Motor Module.
Le curve caratteristiche per funzionamento continuo S1 e funzionamento intermittente S6-60
%, S6-40 % e S6-25 % descrivono i valori di potenza consentiti per una temperatura
ambiente fino a 40 °C. In questo caso si può manifestare una sovratemperatura di
avvolgimento di circa 105 K.
Limite del numero di giri
Il numero di giri massimo ammesso nmax è determinato meccanicamente. La velocità
meccanica massima nmax non deve essere superata e utilizzata in modo continuativo.
CAUTELA
Se il numero di giri nmax viene superato possono verificarsi danni a cuscinetti, anelli di corto
circuito, accoppiamenti stabili, ecc. Pertanto occorre accertarsi che il numero di giri
impostato non superi il limite massimo, utilizzando un comando adeguato o attivando la
sorveglianza del numero di giri nell'azionamento.
Tensioni di uscita
Le tensioni di uscita del convertitore sono diverse a seconda del tipo di convertitore e della
tensione di rete.
Tipo di
convertitore
SINAMICS S120
3AC 380 - 480 V
62
Tensione di rete
Tensione del
circuito intermedio
Tensione di
uscita
Urete
UZK
Umot
Active Line Module
400 V
600 V
425 V
Smart Line Module
400 V
528 V
380 V
Smart Line Module
480 V
634 V
460 V
Modulo di
alimentazione
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.2 Traslazione della curva caratteristica del limite di tensione
4.2
Traslazione della curva caratteristica del limite di tensione
Le curve caratteristiche descritte nel capitolo "Curve caratteristiche P/n e M/n" si riferiscono
all'Active Line Module, Urete = 400 V. La tensione di uscita UMot è pari a 425 V.
Per conoscere i limiti del motore con una tensione di uscita diversa da 425 V, è necessario
spostare la curva caratteristica del limite di tensione tracciata per adeguarla alla nuova
tensione di uscita.
ATTENZIONE
Lo spostamento della curva caratteristica del limite di tensione vale solo per le curve
caratteristiche lineari.
Calcolo della nuova curva caratteristica del limite di tensione
&DOFROR3
&DOFRORQ
1XRYR 3&XUYDFDUDWWHULVWLFD
1XRYR
Q &XUYDFDUDWWHULVWLFD
8 0RWQXRYR
8 0RW WHQVLRQHG
XVFLWD
8 0RW
8 0RWQXRYR QXRYDWHQVLRQHG
XVFLWD
8 0RWQXRYR
8 0RW
Esempio: calcolo della nuova curva caratteristica del limite di tensione nel funzionamento con SLM,
Urete = 400 V, tensione di uscita Umot = 380 V
&XUYDFDUDWWHULVWLFDGHOOLPLWHGLWHQVLRQHD9
3
&XUYDFDUDWWHULVWLFD
FRQQ PLQ N:
1XRYDFXUYDFDUDWWHULVWLFDGHOOLPLWHGLWHQVLRQHD9
31XRYR
N:
3
FRQQ PLQ N:
31XRYR
N:
3
FRQQ PLQ N:
31XRYR
N:
&XUYDFDUDWWHULVWLFD
&XUYDFDUDWWHULVWLFD
9
N:
9
9
N:
9
9
9
N:
,OULVXOWDWRVRQRLSXQWLGLWDJOLRGHOODQXRYDFXUYDFDUDWWHULVWLFDGHOOLPLWHGLWHQVLRQHSHU9
/DQXRYDYHORFLWÑILQRDOODTXDOHOD
SRWHQ]DÙFRVWDQWHVLFDOFRODQHO Q
1XRYR PLQ
VHJXHQWHPRGR
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
9
9
PLQ
63
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
6SDQQXQJVJUHQ]NHQQOLQLHI¾U6/09
YROWDJHOLPLWLQJFKDUDFWHULVWLFVIRU6/09
3>N:@
6SDQQXQJVJUHQ]NHQQOLQLHI¾U$/09
YROWDJHOLPLWLQJFKDUDFWHULVWLFVIRU$/09
Q>USP@
Figura 4-2
Esempio di spostamento della curva caratteristica del limite di tensione
4.3
Curve caratteristiche P/n e M/n
I motori, indipendentemente dal tipo di funzionamento, hanno bisogno di una ventilazione
costante.
Tabella 4- 1
La seguente tabella fornisce una spiegazione delle abbreviazioni
Sigla
64
Unità
Descrizione
nN
1/min o giri/min
Velocità nominale
PN
kW
Potenza nominale
MN
Nm
Coppia nominale
IN
A
Corrente nominale
UN
V
Tensione nominale
fN
Hz
Frequenza nominale
n2
1/min o giri/min
Giri per indebolimento di campo con potenza costante
nmax
1/min o giri/min
Velocità massima
Tth
min
Costante di tempo termica
Iμ
A
Corrente a vuoto
Imax
A
Corrente massima
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
4.3.1
Curve caratteristiche per macchine di produzione
Tabella 4- 2
1PH4103-❑❑F5
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
7,5
48,0
20,5
350
52,8
5400
9000
6
12,0
26,0
GRXEOH'(EHDULQJ
6N:$
USP
USP
FRQWLQXRXV
VKRUWWHUP
3>N:@
6N:$
6N:$
VLQJOH'(EHDULQJ
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
61P$
0>1P@
GRXEOH'(EHDULQJ
61P$
61P$
USP
USP
FRQWLQXRXV
VKRUWWHUP
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
65
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 3
1PH4105-❑❑F5
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
11,0
70,0
28,0
350
52,9
5000
9000
6
13,5
37,0
GRXEOH'(EHDULQJ
6N:$
6N:$
3>N:@
USP
USP
FRQWLQXRXV
VKRUWWHUP
6N:$
VLQJOH'(EHDULQJ
6SDQQXQJVJUHQ]NHQQOLQLH
USP
USP
FRQWLQXRXV
VKRUWWHUP
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
Q>USP@
6SDQQXQJVJUHQ]NHQQOLQLH
61P$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
GRXEOH'(EHDULQJ
61P$
61P$
USP
USP
FRQWLQXRXV
VKRUWWHUP
0>1P@
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
66
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 4
1PH4107-❑❑F5
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
1500
14,0
89,0
35,5
350
52,2
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
5300
9000
6
18,5
46,5
GRXEOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
6N:$
6N:$
6N:$
3>N:@
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
Q>USP@
6SDQQXQJVJUHQ]NHQQOLQLH
61P$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
GRXEOH'(EHDULQJ
61P$
0>1P@
USP
USP
FRQWLQXRXV
VKRUWWHUP
61P$
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
67
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 5
1PH4133-❑❑F5
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
15,0
95,0
35,0
350
51,8
3600
8000
11
13,0
49,0
GRXEOH'(EHDULQJ
6N:$
6N:$
6N:$
USP
USP
FRQWLQXRXV
VKRUWWHUP
3>N:@
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
61P$
61P$
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
GRXEOH'(EHDULQJ
61P$
0>1P@
USP
USP
FRQWLQXRXV
VKRUWWHUP
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
68
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 6
1PH4135-❑❑F5
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
22,0
140,0
52,0
350
51,4
4150
8000
11
24,0
71,0
GRXEOH'(EHDULQJ
6N:$
USP
USP
FRQWLQXRXV
VKRUWWHUP
6N:$
3>N:@
6N:$
6SDQQXQJVJUHQ]NHQQOLQLH
VLQJOH'(EHDULQJ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
6SDQQXQJVJUHQ]NHQQOLQLH
61P$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
61P$
GRXEOH'(EHDULQJ
61P$
USP
USP
FRQWLQXRXV
VKRUWWHUP
0>1P@
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
69
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 7
1PH4137-❑❑F5
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
1500
27,0
172,0
62,0
350
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
51,5
3900
8000
11
24,0
89,0
6SDQQXQJVJUHQ]NHQQOLQLH
6N:$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
GRXEOH'(EHDULQJ
USP
USP
6N:$
6N:$
FRQWLQXRXV
3>N:@
VKRUWWHUP
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
61P$
61P$
GRXEOH'(EHDULQJ
61P$
USP
USP
FRQWLQXRXV
VKRUWWHUP
0>1P@
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
70
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 8
1PH4163-❑❑F5
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
37,0
236
89,0
350
50,9
4700
6500
14
45,0
120,0
6SDQQXQJVJUHQ]NHQQOLQLH
6N:$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6N:$
6N:$
3>N:@
GRXEOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
61P$
61P$
61P$
0>1P@
GRXEOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
71
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 9
1PH4167-❑❑F5
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
1500
46,0
293
107,0
350
51,0
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
4350
6500
14
48,0
146,0
GRXEOH'(EHDULQJ
6N:$
USP
FRQWLQXRXV
VKRUWWHUP
6N:$
3>N:@
USP
6N:$
VLQJOH'(EHDULQJ
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
61P$
GRXEOH'(EHDULQJ
61P$
USP
FRQWLQXRXV
VKRUWWHUP
61P$
0>1P@
USP
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
72
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 10 1PH4168-❑❑F5
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
1500
52,0
331
117,0
350
51,0
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
4300
6500
14
46,0
164,0
GRXEOH'(EHDULQJ
USP
USP
6N:$
FRQWLQXRXV
VKRUWWHUP
6N:$
6N:$
3>N:@
6SDQQXQJVJUHQ]NHQQOLQLH
VLQJOH'(EHDULQJ
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
6SDQQXQJVJUHQ]NHQQOLQLH
61P$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
61P$
GRXEOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
61P$
0>1P@
VLQJOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
73
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
4.3.2
Curve caratteristiche per macchine utensili
Tabella 4- 11 1PH4103-❑❑F2
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
7,5
48,0
26,0
265
53,3
8664
12000
6
11,7
37,0
6SDQQXQJVJUHQ]NHQQOLQLH
6N:$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6N:$
3>N:@
6N:$
6N:$
GRXEOH'(EHDULQJ
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
61P$
6SDQQXQJVJUHQ]NHQQOLQLH
0>1P@
61P$
61P$
61P$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
GRXEOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
74
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 12 1PH4105-❑❑F2
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
11,0
70,0
38,0
263
53,2
8799
12000
6
16,6
54,0
3>N:@
6N:$
6N:$
6N:$
6N:$
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
ZLWKRSWLRQ/
GRXEOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
61P$
61P$
6SDQQXQJVJUHQ]NHQQOLQLH
61P$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
0>1P@
GRXEOH'(EHDULQJ
61P$
USP
USP
FRQWLQXRXV
VKRUWWHUP
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
75
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 13 1PH4107-❑❑F2
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
14,0
89,0
46,0
265
53,1
8585
12000
6
19,1
68,0
6N:$
6SDQQXQJVJUHQ]NHQQOLQLH
6N:$
6N:$
3>N:@
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6N:$
ZLWKRSWLRQ/
GRXEOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
61P$
61P$
6SDQQXQJVJUHQ]NHQQOLQLH
61P$
GRXEOH'(EHDULQJ
0>1P@
61P$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
USP
USP
FRQWLQXRXV
VKRUWWHUP
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
76
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 14 1PH4133-❑❑F2
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
15,0
95,0
55,0
229
51,9
8290
11000
11
18,8
92,0
6SDQQXQJVJUHQ]NHQQOLQLH
3>N:@
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6N:$
6N:$
6N:$
6N:$
GRXEOH'(EHDULQJ
ZLWKRSWLRQ/
USP
USP
USP
USP
FRQWLQXRXV
VKRUWWHUP
FRQWLQXRXV
VKRUWWHUP
0>1P@
Q>USP@
61P$
6SDQQXQJVJUHQ]NHQQOLQLH
61P$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
GRXEOH'(EHDULQJ
61P$
USP
USP
FRQWLQXRXV
VKRUWWHUP
61P$
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
77
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 15 1PH4135-❑❑F2
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
22,0
140,0
73,0
251
51,7
7433
10000
11
27,5
118
6N:$
6SDQQXQJVJUHQ]NHQQOLQLH
6N:$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6N:$
3>N:@
6N:$
ZLWKRSWLRQ/
GRXEOH'(EHDULQJ
USP
USP
USP
USP
FRQWLQXRXV
VKRUWWHUP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
61P$
61P$
61P$
6SDQQXQJVJUHQ]NHQQOLQLH
GRXEOH'(EHDULQJ
61P$
0>1P@
USP
USP
FRQWLQXRXV
VKRUWWHUP
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
78
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 16 1PH4137-❑❑F2
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
27,0
172,0
85,0
265
51,6
6853
10000
11
32,7
137
6N:$
6SDQQXQJVJUHQ]NHQQOLQLH
3>N:@
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6N:$
6N:$
6N:$
GRXEOH'(EHDULQJ
ZLWKRSWLRQ/
USP
USP
USP
USP
FRQWLQXRXV
VKRUWWHUP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
61P$
61P$
6SDQQXQJVJUHQ]NHQQOLQLH
GRXEOH'(EHDULQJ
0>1P@
61P$
61P$
USP
USP
FRQWLQXRXV
VKRUWWHUP
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
79
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 17 1PH4138-❑❑F2
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
30,0
191,0
102,0
244
51,6
7861
10000
11
35,8
164
6SDQQXQJVJUHQ]NHQQOLQLH
6N:$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6N:$
3>N:@
6N:$
6N:$
GRXEOH'(EHDULQJ
USP
USP
USP
FRQWLQXRXV
VKRUWWHUP
FRQWLQXRXV
VKRUWWHUP
ZLWKRSWLRQ/
USP
Q>USP@
61P$
61P$
0>1P@
GRXEOH'(EHDULQJ
61P$
USP
USP
FRQWLQXRXV
VKRUWWHUP
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
61P$
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
80
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 18 1PH4163-❑❑F2
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
37,0
236
107,0
286
51,0
6307
8000
14
43,9
169
6N:$
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6N:$
6N:$
3>N:@
6N:$
ZLWKRSWLRQ/
GRXEOH'(EHDULQJ
USP
USP
USP
FRQWLQXRXV
VKRUWWHUP
FRQWLQXRXV
USP
VKRUWWHUP
Q>USP@
61P$
0>1P@
61P$
61P$
61P$
GRXEOH'(EHDULQJ
USP
USP
FRQWLQXRXV
VKRUWWHUP
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
81
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 19 1PH4167-❑❑F2
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
46,0
293
120,0
315
51,0
5198
8000
14
49,1
185
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
3>N:@
6SDQQXQJVJUHQ]NHQQOLQLH
6N:$
6N:$
6N:$
6N:$
GRXEOH'(EHDULQJ
ZLWKRSWLRQ/
USP
USP
USP
USP
FRQWLQXRXV
VKRUWWHUP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
61P$
61P$
GRXEOH'(EHDULQJ
61P$
USP
USP
0>1P@
61P$
VKRUWWHUP
FRQWLQXRXV
6SDQQXQJVJUHQ]NHQQOLQLH
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
82
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.3 Curve caratteristiche P/n e M/n
Tabella 4- 20 1PH4168-❑❑F2
nN
[giri/min]
PN
[kW]
MN
[Nm]
IN
[A]
UN
[V]
fN
[Hz]
n2
[giri/min]
nmax
[giri/min]
Tth
[min]
Iμ
[A]
Imax
[A]
1500
52,0
331
148,0
284
51,0
6351
8000
14
58,4
235
6SDQQXQJVJUHQ]NHQQOLQLH
6N:$
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
6N:$
6N:$
3>N:@
6N:$
GRXEOH'(EHDULQJ
ZLWKRSWLRQ/
USP
USP
USP
USP
FRQWLQXRXV
VKRUWWHUP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
61P$
GRXEOH'(EHDULQJ
61P$
USP
FRQWLQXRXV
VKRUWWHUP
6SDQQXQJVJUHQ]NHQQOLQLH
61P$
0>1P@
USP
YROWDJHOLPLWLQJFKDUDFWHULVWLFV
61P$
ZLWKRSWLRQ/
USP
USP
FRQWLQXRXV
VKRUWWHUP
Q>USP@
SINAMICS S120 Active Line Module, Urete eff = 400 V
Le curve caratteristiche sono valide per parametri dell'azionamento ottimizzati
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
83
Dati tecnici e curve caratteristiche
4.4 Disegni quotati
4.4
Disegni quotati
CAD CREATOR
Il CAD CREATOR, mediante un'interfaccia di configurazione facilmente comprensibile,
consente di creare rapidamente
● dati tecnici
● disegni quotati
● dati CAD 2D/3D
e offre un supporto per realizzare la documentazione degli impianti a livello di informazioni
specifiche di progettazione e liste di componenti.
Nella versione online sono attualmente disponibili i dati per i motori, gli azionamenti e i
controllori CNC. Nella intranet all'indirizzo http://www.siemens.com/cad-creator
Motori
● Motori sincroni 1FK7, 1FT6, 1FT7, 1FE1
● Motori Torque completi 1FW3
● Motoriduttori 1FK7, 1FK7 DYA, 1FT6, 1FT7
● Motori asincroni 1PH7, 1PH4, 1PL6, 1PH8 AH 355
● Motori asincroni 1PM4, 1PM6
● Elettromandrini 2SP1
SINAMICS S120
● Control Unit
● Line Module (Booksize)
● Componenti lato rete
● Motor Module (Booksize)
● Componenti del circuito intermedio
● Componenti di sistema aggiuntivi
● Collegamento del sistema encoder
● Tecnica di collegamento MOTION-CONNECT
SIMOTION D
● SIMOTION D410 DP, D410 PN, D425. D435, D445
SINUMERIK solution line
● Controllori
● Componenti operativi per controlli CNC
84
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.4 Disegni quotati
Aggiornamento dei disegni quotati
Nota
La Siemens AG si riserva la facoltà di apportare, senza alcun preavviso, modifiche alle
dimensioni della macchina, al fine di migliorare il prodotto. Quindi è possibile che i disegni
quotati non siano aggiornati. I disegni quotati aggiornati possono essere richiesti
gratuitamente al reparto di vendita della sede Siemens competente.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
85
Dati tecnici e curve caratteristiche
4.4 Disegni quotati
1PH4 - Raffreddamento ad acqua IM B35
For motor
Dimensions in mm (in)
Shaft Type
height
DIN
IEC
a
B
a1
P
b
A
b1
N
c
LA
c1
–
e1
–
f
AB
f1
T
h
H
i2
–
k
LB
m
BA
m1
–
m2
–
n
AA
250
(9.84)
160
(6.30)
180
(7.09)
11
(0.43)
12
(0.47)
215
(8.46)
190
(7.48)
4
(0.16)
100
(3.94)
80
(3.15)
35
(1.38)
60
(2.36)
24
(0.94)
40
(1.57)
350
216
(13.78) (8.50)
250
(9.84)
14
(0.55)
16
(0.63)
300
245
(11.81) (9.65)
5
(0.20)
132
(5.20)
110
(4.33)
416
(16.38)
476
(18.74)
541
(21.30)
458
(18.03)
528
(20.79)
578
(22.76)
36
(1.42)
85
(3.35)
24
(0.94)
43
(1.69)
1PH4, type IM B35, water cooling
100
349
(13.74)
409
(16.10)
474
(18.66)
377
(14.84)
447
(17.60)
497
(19.57)
1PH4103
1PH4105
1PH4107
132
1PH4133
1PH4135
1PH4137
DE shaft extension
Shaft Type
height
100
DIN
IEC
1PH4103
1PH4105
1PH4107
132
1PH4133
1PH4135
1PH4137
o
–
p
HD
244
(9.61)
304
(11.97)
369
(14.53)
264
(10.39)
334
(13.15)
384
(15.12)
s
K
s2
K
s3
–
w1
C
d
D
d6
–
I
E
t
GA
u
F
259
12
(10.20) (0.47)
14
(0.55)
Pg 29
44
(1.73)
38
(1.50)
M12
80
(3.15)
41
(1.61)
10
(0.39)
334.5 12
(13.17) (0.47)
18
(0.71)
Pg 36
53
(2.09)
42
(1.77)
M16
110
(4.33)
45
(1.77)
12
(0.47)
1PH410 .
1PH413 .
Water connection
G 1/4 for 1PH410.
G 3/8 for 1PH413.
k
o
i2
c1
Water connection
G 1/4 for 1PH410.
G 3/8 for 1PH413.
s3
s2
e1
A
d6
Øs
f1
w1
m1
a
m
c
h
u
b1
d
p
l
t
n
a1
b
f
G_DA65_EN_00164b
A
m2
86
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Dati tecnici e curve caratteristiche
4.4 Disegni quotati
For motor
Dimensions in mm (in)
Shaft Type
height
DIN
IEC
a
B
a1
P
b
A
b1
N
c
LA
c1
–
e1
–
f
AB
f1
T
18
(0.71)
350
294
5
(13.78) (11.57) (0.20)
h
H
i2
–
k
LB
m
BA
160
(6.30)
110
(4.33)
591
44
(23.27) (1.73)
646
(25.43)
691
(27.20)
m1
–
m2
–
n
AA
77
(3.03)
29
(1.14)
49
(1.93)
1PH4, type IM B35, water cooling
160
508
400
254
300
15
(20.00) (15.75) (10.00) (11.81) (0.59)
563
(22.17)
608
(23.94)
1PH4163
1PH4167
1PH4168
DE shaft extension
Shaft Type
height
160
o
–
DIN
IEC
p
HD
s
K
407
388
14
(16.02) (15.28) (0.55)
462
(18.19)
507
(19.96)
1PH4163
1PH4167
1PH4168
s2
K
s3
–
w1
C
d
D
d6
–
I
E
t
GA
u
F
18
(0.71)
Pg 36
56
(2.20)
55
(2.17)
M20
110
(4.33)
59
(2.32)
16
(0.63)
1PH416 .
k
o
i2
Water connection G 1/2
Water connection G 1/2
s3
c1
s2
e1
A
d6
?
f1
s
w1
m1
a
t
c
h
u
G_DA65_EN_00165
b1
d
p
l
n
a1
A
b
f
m
m2
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
87
Dati tecnici e curve caratteristiche
4.4 Disegni quotati
88
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
5
Componenti del motore
5.1
Protezione termica del motore
Per sorvegliare la temperatura del motore, come sensore di temperatura è stata integrata
una resistenza termica nell'avvolgimento dello statore.
Tabella 5- 1
Caratteristiche e dati tecnici
Definizione
Descrizione
Tipo
KTY 84 (termistore)
Resistenza al freddo (20 °C)
ca. 580 Ω
Resistenza al caldo (100 °C)
ca. 1000 Ω
Temperatura di intervento
Preavviso a 120 °C ± 5 °C
Disinserzione a 155 °C ± 5 °C
Collegamento
tramite il cavo di segnale
ATTENZIONE
La polarità deve essere rispettata.
La variazione della resistenza di KTY 84 è proporzionale alla variazione della temperatura
dell'avvolgimento (vedere la figura seguente).
5>N˖@
,
' P$
Figura 5-1
˽>r&@
X
Andamento del sensore di temperatura KTY 84 in funzione della temperatura
La valutazione di KTY 84 ha luogo nel convertitore, la cui regolazione tiene conto
dell'andamento della temperatura dell'avvolgimento del motore. In caso di anomalie, il
convertitore emette il relativo messaggio di errore. Se la temperatura aumenta, viene
emesso un messaggio di "Preavviso sovratemperatura motore", che può essere elaborato
esternamente. Se il messaggio viene ignorato, una volta trascorso il tempo impostato oppure
in caso di superamento della temperatura limite del motore o della temperatura di
disinserzione, il convertitore viene disinserito e viene emesso il messaggio di errore
corrispondente.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
89
Componenti del motore
5.1 Protezione termica del motore
AVVERTENZA
Il sensore di temperatura integrato KTY protegge i motori dai sovraccarichi fino a Imax.
Per i casi di carico termicamente critici, ad es. elevato sovraccarico a motore fermo, non è
più disponibile una protezione sufficiente. Sarà quindi opportuno prevedere un'ulteriore
protezione, ad es. un relè per sovraccarico termico.
Il sensore di temperatura è realizzato secondo i requisiti DIN/EN relativi alla "separazione
galvanica sicura".
AVVERTENZA
Se l'operatore intende eseguire un'ulteriore prova ad alta tensione, le estremità dei cavi dei
sensori di temperatura vanno cortocircuitate prima della prova! L'applicazione della
tensione di prova su un solo morsetto di collegamento del sensore di temperatura provoca
la distruzione del sensore.
90
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.2 Encoder
5.2
Encoder
ATTENZIONE
In caso di sostituzione dell'encoder è necessario regolarne la posizione rispetto alla FEM
motore. La sostituzione può essere eseguita solo da personale qualificato. Una regolazione
errata dell'encoder rispetto alla FEM motore può provocare movimenti incontrollati.
La scelta dell'encoder viene definita nel codice di ordinazione (MLFB) del motore alla
9.posizione indicando le lettere corrispondenti. La lettera da indicare alla 9.posizione del
codice di ordinazione (MLFB) è diversa per i motori con o senza DRIVE-CLiQ.
Tabella 5- 2
Lettera di identificazione dell'encoder nel numero di ordinazione (MLFB)
Tipo di encoder
Carattere nella 9ª
posizione nel codice di
ordinazione (MLFB)
Motori senza interfaccia DRIVE-CLiQ
Encoder assoluto 2048 S/R Singleturn, 4096 rotazioni Multiturn, con
interfaccia EnDat (encoder AM2048S/R)
E
Encoder incrementale HTL 1024 S/R (Encoder 1024S/R)
H
Encoder incrementale HTL 2048 S/R (Encoder 2048S/R)
J
Encoder incrementale sen/cos 1 Vpp 2048 S/R con le tracce C e D
(encoder IC2048S/R)
M
Encoder incrementale sen/cos 1 Vpp 2048 S/R senza tracce C e D
(encoder IN2048S/R)
N
Motori con interfaccia DRIVE-CLiQ
Encoder assoluto 22 bit Singleturn (risoluzione 4194304, internamente
V
all'encoder (2048 S/R) + 12 bit Multiturn (campo di movimento 4096 giri)
(encoder AM22DQ)
Encoder incrementale 22 bit (risoluzione 4194304, internamente
all'encoder 2048 S/R), con posizione di commutazione 11 bit
(encoder IC22DQ)
D
Encoder incrementale 22 bit (risoluzione 4194304, internamente
all'encoder 2048 S/R), senza posizione di commutazione
(encoder IN19DQ)
Q
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
91
Componenti del motore
5.2 Encoder
5.2.1
Collegamento trasduttore per motori con interfaccia DRIVE-CLiQ
I motori con DRIVE-CLiQ hanno un Sensor Module che contiene la valorizzazione del
trasduttore, il rilevamento della temperatura del motore ed una targhetta elettronica del tipo.
Questo Sensor Module è montato in sostituzione del connettore segnali ed ha un connettore
femmina RJ45-plus a 10 poli.
AVVERTENZA
Il Sensore Module contiene dati specifici sul motore e sul trasduttore oltre ad una targhetta
elettronica relativa al tipo, quindi può essere utilizzato solo per un motore originale e non
per altri motori e non può essere sostituito con Sensor Module di altri motori.
Il Sensor Module è a diretto contatto con componenti sensibili alle cariche elettrostatiche
(ESD). I collegamenti non devono venire a contatto con le mani o con utensili che possono
essere caricati elettrostaticamente.
5.2.2
Collegamento encoder per motori senza interfaccia DRIVE-CLiQ
I motori senza interfaccia DRIVE-CLiQ vengono collegati tramite il connettore femmina
flangiato a 17 poli.
92
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.2 Encoder
5.2.3
Encoder incrementale HTL
Funzione:
● Sistema di misura angolare per commutazione
● Rilevamento del valore reale di velocità
● Sistema di misura incrementale indiretto per anello di regolazione della posizione
● Un impulso di zero (tacca di riferimento) al giro
Tabella 5- 3
Caratteristiche e dati tecnici
Caratteristiche
Encoder incrementale HTL 1024
S/R (encoder HTL1024S/R)
Encoder incrementale HTL 2048
S/R (encoder HTL2048S/R)
Accoppiamento
su NDE
su NDE
Tensione di esercizio
+10 ... +30 V
+10 ... +30 V
Corrente assorbita
max. 150 mA
max. 150 mA
Risoluzione incrementale (periodi per rotazione)
1024
2048
Segnali incrementali
HTL
Traccia A, traccia B, impulso di
zero e segnali invertiti
HTL
Traccia A, traccia B, impulso di
zero e segnali invertiti
Errore angolare
±1'
±1'
Collegamento
Tabella 5- 4
Assegnazione dei pin del connettore flangiato a 12 poli
N. PIN
Segnale
1
B*
2
+1R1
3
R
4
R*
5
A
6
A*
7
CTRL TACHO
8
B
9
not connected
10
M-Encoder
11
-1R2
12
P-Encoder
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Vista lato connettore (pin)
93
Componenti del motore
5.2 Encoder
Cavi
Controconnettore: 6FX2003-0SU12
Tabella 5- 5
Cavo confezionato per SINAMICS:
6FX ☐ 002
- 2AH00
- ☐☐☐
0
↓
↓↓↓
↓
Lunghezza
5 MOTIONCONNECTⓇ500
Lunghezza del cavo max.:
senza trasferimento del segnale invertito 150 m
con trasferimento del segnale invertito 300 m
8 MOTIONCONNECTⓇ800
Per ulteriori dati tecnici e per i codici relativi alle varie lunghezze consultare il catalogo al
capitolo "Tecnica di collegamento MOTION-CONNECT"
94
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.2 Encoder
5.2.4
Encoder incrementale sen/cos 1 Vpp
Funzione:
● Sistema di misura angolare per commutazione
● Rilevamento del valore reale di velocità
● Sistema di misura incrementale indiretto per anello di regolazione della posizione
● Un impulso di zero (tacca di riferimento) al giro
Tabella 5- 6
Caratteristiche e dati tecnici
Caratteristiche
Encoder incrementale sen/cos 1 Vpp
2048 S/R con tracce C e D (encoder
IC2048S/R)
Encoder incrementale sen/cos 1
Vpp 2048 S/R senza tracce C e D
(encoder IN2048S/R)
Accoppiamento
su NDE
su NDE
Tensione di esercizio
+5 V ±5 %
+5 V ±5 %
Corrente assorbita
max. 150 mA
max. 150 mA
Tracce A/B: Risoluzione incrementale
(periodi sen/cos per rotazione)
2048 S/R (1 Vpp)
2048 S/R (1 Vpp)
Traccia C/D: Posizione del rotore (periodi
sen/cos per rotazione)
1 S/R (1 Vpp)
---
Segnale di riferimento
1 per rotazione
1 per rotazione
Errore angolare
±40''
±40''
8>9@
rHO
$
%
5
rPHFF
rHO
Ǿ
rHO
Ǿ
Ǿ
rHOsrHO
8>9@
&
'
5
Ǿ
Ǿ
Ǿ
rHO rPHFF
Figura 5-2
Sequenza dei segnali e abbinamento con rotazione positiva (rotazione
destrorsa vista dal lato DE)
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
95
Componenti del motore
5.2 Encoder
Collegamento
Tabella 5- 7
Assegnazione dei pin del connettore flangiato a 17 poli
N. PIN
Segnale
1
A
2
A*
3
R
4
D*
5
C
6
C*
7
M-Encoder
8
+1R1
9
-1R2
10
P-Encoder
11
B
12
B*
13
R*
14
D
15
0 V Sense
16
5 V Sense
17
not connected
Vista lato connettore (pin)
Cavi
Controconnettore: 6FX2003-0SU17
Tabella 5- 8
Cavo confezionato per SINAMICS
6FX ☐ 002
- 2CA31
- ☐☐☐
0
↓
↓↓↓
↓
Lunghezza
5 MOTIONCONNECTⓇ500
max. lunghezza del cavo 100 m
8 MOTIONCONNECTⓇ800
Per ulteriori dati tecnici e per i codici relativi alle varie lunghezze consultare il catalogo al
capitolo "Tecnica di collegamento MOTION-CONNECT"
96
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.2 Encoder
5.2.5
Encoder assoluto (EnDat)
Funzione:
● Sistema di misura angolare per commutazione
● Rilevamento del valore reale di velocità
● Sistema di misura indiretto per la definizione assoluta della posizione nell'ambito di una
rotazione
● Sistema di misura indiretto per la definizione assoluta della posizione nell'ambito di un
campo di lavoro di 4096 rotazioni
● Sistema di misura incrementale indiretto per anello di regolazione della posizione
Tabella 5- 9
Caratteristiche e dati tecnici
Caratteristiche
Encoder assoluto EnDat 2048 S/R (encoder
AM2048S/R)
Accoppiamento
su NDE
Tensione di esercizio
+5 V ±5 %
Corrente assorbita
max. 300 mA
Risoluzione assoluta (Singleturn)
8192
Campo di posizionamento (Multiturn)
4096 rotazioni
Tracce A/B: risoluzione incrementale (periodi sen/cos per rotazione)
2048 S/R (1 Vpp)
Errore angolare
±40''
Interfaccia seriale per posizione assoluta
EnDat 2.1
Collegamento
Tabella 5- 10 Assegnazione dei pin del connettore flangiato a 17 poli
N. PIN
Segnale
1
A
2
A*
3
data
4
not connected
5
clock
6
not connected
7
M-Encoder
8
+1R1
9
-1R2
10
P-Encoder
11
B
12
B*
13
data*
14
clock*
15
0 V Sense
16
5 V Sense
17
not connected
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Vista lato connettore (pin)
97
Componenti del motore
5.2 Encoder
Cavi
Controconnettore: 6FX2003-0SU17
Tabella 5- 11 Cavo confezionato per SINAMICS
6FX ☐ 002
- 2EQ10 - ☐☐☐
0
↓
↓↓↓
↓
Lunghezza
5 MOTIONCONNECTⓇ500
max. lunghezza di cavo 100 m
8 MOTIONCONNECTⓇ800
Per ulteriori dati tecnici e per i codici relativi alle varie lunghezze consultare il catalogo al
capitolo "Tecnica di collegamento MOTION-CONNECT"
98
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.3 Freno di stazionamento
5.3
Freno di stazionamento
Affinché l'albero motore sia privo di gioco in condizione di fermo, è possibile ordinare un
motore dotato sul lato DE di freno di stazionamento a una faccia.
Nota
Il freno di stazionamento non può essere montato in un secondo tempo.
I freni di stazionamento non possono essere utilizzati unitamente al riduttore a due gamme.
Tabella 5- 12 Codice per l'ordinazione del freno di stazionamento
Freno di stazionamento per motori AH 100 ... AH 160
Codice
Il motore è predisposto per il montaggio di un freno di stazionamento;
il freno va montato a cura del cliente
G95
Motore con freno di stazionamento ZF montato
G46
Struttura
Lo scudo lato DE è fornito con un copricuscinetto esterno in esecuzione speciale come
accessorio di fissaggio per il corpo magnete (corpo frenante). Il corpo del magnete può
essere avvitato dal cliente. Il disco del freno va avvitato all'elemento di trasmissione
(puleggia o simili). I freni sono senza anello collettore ed esenti da manutenzione. Entrambe
le superfici di attrito sono di metallo.
Tabella 5- 13 Grado di protezione e tensione di allacciamento
Grado di protezione
IP00
Tensione di allacciamento
DC 24 V ± 10 %
Funzionamento
Il freno lavora secondo il principio della corrente di carico, ossia in assenza di corrente il
freno è aperto.
CAUTELA
Inserire il freno solo a motore fermo.
Il freno di stazionamento deve essere rilasciato durante il cambio gamma e durante la
corsa del motore (in assenza di corrente). Dopo il rilascio non è presente coppia residua.
Il freno di stazionamento è dimensionato solo per un numero limitato di frenature
d'emergenza. L'utilizzo come freno di lavoro non è ammesso.
Dopo il montaggio del motore, controllare che il freno funzioni perfettamente.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
99
Componenti del motore
5.3 Freno di stazionamento
Dati tecnici del freno di stazionamento
Tabella 5- 14 Dati tecnici del freno di stazionamento
Altezza asse
[mm]
Tipo ZF
N. di
ordinazione
Coppia da
fermo
[Nm]
Potenza
assorbita1)
[W]
Tempo di
chiusura
[ms]
100
EB 3M
2LX2 146–0
30
20
100
132
EB 8M
2LX2 145–0
100
34
130
160
EB 8M
2LX2 145–0
100
34
130
1) Temperatura della bobina 20 °C
100
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.3 Freno di stazionamento
Quote del freno di stazionamento a una faccia per motori di altezza d'asse da 100 a 160
)UHQRHOHWWURPDJQHWLFRDXQDIDFFLD
'LVFRGHOIUHQR
YLWLFLOLQGULFKHFRQWHVWDFDYDHVDJRQDOH',1R',1
&RSULFXVFLQHWWRHVWHUQR'(LQHVHFX]LRQHVSHFLDOH
5RQGHOODRDQHOORGLUHJROD]LRQHSHUWUDIHUURRFRPHULVFRQWURSHUHOHPHQWLGLVHUUDJJLRYDULDELOHSHUFRPSHQVDUHODWROOHUDQ]D
6SD]LRSHUHOHPHQWRGLVHUUDJJLR
YLWLFLOLQGULFKHFRQWHVWDFDYDHVDJRQDOH0[R0[VHFRQGR',1
&ROOHJDPHQWRHOHWWULFRFRQQHWWRUHSLDWWR',1$
7UDIHUURV PPWUDFRUSRIUHQDQWHHGLVFR
0LVXUDSHUWHUPLQDOHIDVWRQJUDQGH]]D
Figura 5-3
Montaggio di un freno di stazionamento sul lato DE dei motori da 1PH410⃞ a 1PH416⃞ come esempio:
Fissaggio del disco su una puleggia per cinghia trapezoidale con chiavetta (metà superiore) o su una puleggia
per cinghia dentata, per elementi di serraggio (metà inferiore)
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
101
Componenti del motore
5.4 Riduttore
Tabella 5- 15 Dimensioni per il montaggio del freno di stazionamento a una faccia
Altezza d'asse
[mm]
Estremità d'albero DE, dimensione in [mm]
d
D
I
h
y
d1
d2
d3
H8
5.4
d4
3 x spostato di 120°
100
38
118
80
77
15
45
94 ± 0,1
M6
42
132
42
167
110
100
11
70
118 ± 0,1
M8
60
160
55
167
110
100
7
70
118 ± 0,1
M8
63
Riduttore
Il montaggio di un riduttore è necessario se
● la coppia di azionamento a basse velocità non è sufficiente
● il campo di potenza costante non è sufficiente per sfruttare la potenza del taglio in tutto il
range di velocità.
Per informazioni riguardanti i riduttori si prega di contattare direttamente la ditta costruttrice:
Ditta
ZF Friedrichshafen AG, Antriebstechnik Maschinenbau
D-88038 Friedrichshafen
Telefono: 07541/77-0
Telefax: 07541/77-3470
Internet: http://www.ZF-Group.de
Per poter montare un riduttore devono essere soddisfatti i seguenti requisiti:
Tabella 5- 16 Premesse per l'accoppiamento riduttore
Presupposti per il montaggio di riduttori con altezze d'asse da 100 a 160
Forma costruttiva IM B5, IM B35 oppure IM V15
Albero con chiavetta ed equilibratura con chiavetta intera
Caratteristiche del riduttore
● Esecuzione come riduttore epicicloidale
● Efficienza del riduttore superiore al 95 %
● Riduttore fornibile per motori con altezze asse da 100 a 160
● Cambio di velocità fornibile per potenze di azionamento fino a 100 kW
● Forme costruttive dei motori disponibili: IM B35 (IM V15) e IM B5 (IM V1)
102
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.4 Riduttore
Nota
La serie di motori 1PH4 è dimensionata per le sollecitazioni indicate nelle specifiche
(vedere diagramma delle forze radiali e delle coppie max.).
Utilizzando elementi di potenziamento della forza/coppia, ad es. un riduttore, l'aumentata
sollecitazione meccanica (ad es. per effetto delle forze di pretensione della cinghia) deve
essere compensata da un corrispondente elemento di rafforzamento. Questo aspetto va
considerato dal responsabile della pianificazione dell'impianto. Per un riduttore ciò implica
che, ad esempio, le aumentate forze di pretensione della cinghia vengono sopportate dal
riduttore e trasferite alla macchina.
Nelle unità di azionamento che sono fissate ad es. alla flangia o alla scatola del riduttore,
il motore di forma costruttiva IM B35 non deve essere sottoposto a sollecitazioni sul lato
NDE.
3>N:@
3 FRVWDQWH
FRQULGXWWRUH
3 FRVWDQWH
VHQ]DULGXWWRUH
3
1
Q>JLULPLQ@
Q1ಬ
0 FRVWDQWH
Q1
0 FRVWDQWH
Q1
Q1ಬ
QPD[
31
Figura 5-4
QPD[
'LYLVLRQHORJDULWPLFD
9HORFLW¢
QRPLQDOH
9HORFLW¢
QRPLQDOH
GLYHORFLW¢DGXHJDPPH
FRQ
FDPELR
9HORFLW¢
PD[
FRQVHQWLWD
3RWHQ]D
QRPLQDOH
Q]DFRVWDQWHGHOPRWRUH
H
DQFKH
SRWH
1HOODJDPPDGLYHORFLW¢GDQDQRSSXUHGDQDQ
PD[
1ಬ
PD[
1
Diagramma velocità-potenza con cambio a due gamme di velocità per l'espansione della
gamma di velocità a potenza costante nei motori per azionamento mandrino
Esempio:Motore senza cambio di velocità
Con P = costante di nN = 1500 giri/min fino a nmax = 6300 giri/min è possibile un campo di
regolazione per potenza costante superiore a 1:4.
Stesso motore con cambio di velocità:
Con gamma i1 = 4 e i2 = 1 è possibile un campo di regolazione a potenza costante superiore
a 1:16 (nN = 375 giri/min fino a nmax = 6300 giri/min).
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
103
Componenti del motore
5.4 Riduttore
Riduttori all'esterno della custodia mandrino
Evitando di montare il riduttore nella testa del mandrino si hanno questi vantaggi:
● Nessuna trasmissione di vibrazioni del riduttore.
● Sistemi di lubrificazione separati per il mandrino principale (grasso) e per il riduttore (olio).
● Assenza di rumorosità e stabilità di temperatura per l'assenza degli ingranaggi del
riduttore nella testa del mandrino.
● La potenza di azionamento, anziché tramite cinghie può essere trasmessa (su richiesta)
anche tramite un pignone dentato o in modo coassiale tramite un giunto di
compensazione dalla presa di forza del riduttore.
Grado di vibrazione
Motore + riduttore: Livello di tolleranza R (secondo DIN ISO 2373)
Valido anche per motori con livello di tolleranza S.
Chiusura stagna tra flangia motore e flangia riduttore
Per AH 132 e AH 160 la chiusura stagna deve essere effettuata, a causa della presenza
dell'anello di centraggio interrotto, con mastice (ad es. Terostat 93, ditta Teroson).
5.4.1
Struttura del riduttore
Figura 5-5
104
0R]]RGHOO
D]LRQDPHQWR
3LDVWUDGLDGDWWDPHQWR
$QHOORGLWHQXWDUDGLDOH
GHOO
DOEHUR
6XSSRUWRGHOPR]]R
6FDWRODGHOULGXWWRUH
5XRWDSODQHWDULD
&RURQDGHQWDWD
6XSSRUWRGHOODFRURQD
GHQWDWD
&XVWRGLDGHOFXVFLQHWWR
6XSSRUWRDOEHURGLXVFLWD
6XSSRUWRDOEHURGLXVFLWD
$OEHUR
$QHOORGLWHQXWDUDGLDOH
GHOO
DOEHUR
6XSSRUWRLQJUDQDJJL
HSLFLFORLGDOL
&XVFLQHWWRDVVLDOHFRQ
PROOHDWD]]D
0DQLFRWWRVLQFURQL]]DWRUH
)RUFHOODGLFRPDQGR
'LVFRGHOIUHQR
(OHWWURPDJQHWHGL
VROOHYDPHQWR
$OEHURGLFRPDQGR
3LDVWUDGLFRQQHVVLRQH
Struttura del riduttore
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.4 Riduttore
Per il cambio di velocità vale: Posizione dell'interruttore I:
i1 = 4
Posizione dell'interruttore II: i2 = 1
Entrambi i rapporti di riduzione sono comandati in modo elettrico e ogni cambio gamma è
sorvegliato da sensori.
La presa di forza del riduttore è disposta in modo coassiale rispetto all'albero del motore.
Gioco torsionale (misurato sulla presa di forza del riduttore): 30'
Per lavorazioni di fresatura e lavorazioni con taglio interrotto sono disponibili su richiesta le
seguenti esecuzioni speciali:
● gioco limitato: max. 20’
● gioco limitato per esigenze maggiori: max. 15’
Puleggia
● La puleggia deve essere eseguita come puleggia a tazza.
● L'albero di trasmissione del riduttore ha una flangia con centratura esterna e fori filettati
per il fissaggio della puleggia.
● L'intero azionamento grazie all'utilizzo di pulegge di grossa sezione dovrebbe avere una
sufficiente rigidità. Questo ha un effetto positivo sulla silenziosità di rotazione
dell'azionamento.
5.4.2
Dati tecnici
Tabella 5- 17 Dati tecnici del riduttore
Tipo
AH
N. di
ordinazione
Sigla ZF
Velocità
Coppia nominale
Coppia massima
massima
(funzionamento S1)
(funzionamento S6,
nmax
Peso
Scatola di
trasmissione
10 min ciclo,
max. 60% durata d'inserzione)
Azioname
nto
Trasmissione
Azioname
nto
Trasmissione
[giri/min]
[Nm]
i=1
[Nm]
i=4
[Nm]
[Nm]
i=1
[Nm]
i=4
[Nm]
[kg]
[mm]
2K120
100
2LG4312-...
8000 1)
9000 2)
120
120
480
140
140
560
30
100
2K250
132
2LG4315-...
6300
8000 2)
250
250
1000
400
400
1600
62
116
2K300
160
2LG4320-...
6300
8000 2)
300
300
1200
400
400
1600
70
140
1)
Num. di giri massimo 8000 ... 9000 giri/min con oltre il 20% di durata di inserzione possibile
solo con lubrificazione ad iniezione
2)
Ammesso con raffreddamento a olio del riduttore per cambio di velocità i = 1
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
105
Componenti del motore
5.4 Riduttore
ATTENZIONE
Per il dimensionamento dell'intera unità di azionamento (motore con riduttore) sono
determinanti i dati del riduttore.
Con il motore 1PH4168 occorre, ad es., ridurre la coppia a 300 Nm.
Nei motori con altezze d'asse 100 e 132 la velocità max. del motore dovrà essere limitata
alla velocità consentita per il riduttore 2K120 / 2K250.
Per ulteriori dati tecnici e indicazioni per la progettazione (ad es. lubrificazione,
riscaldamento, forze radiali ammesse ed esempi) consultare il catalogo Riduttori 2K della
ditta ZF (Zahnradfabrik Friedrichshafen).
5.4.3
Collegamento elettrico
Alimentazione per l'unità di commutazione: DC 24 V ±10%
L'unità di commutazione meccanica richiede un'alimentazione a parte
Connettore (compreso nella fornitura): Prodotto Harting; a 7 poli + PE tipo HAN 7D
0
Figura 5-6
6
3(
6
Schema circuitale
Tabella 5- 18 Spiegazione della connessione
N. contatto
del connettore
Numero e
denominazione
Ingresso
Uscita
Tensione
Corrente
2e3
1 unità di
commutazione
0
–
DC 24 V
Imax = 5 A (corrente di
spunto)
4e6
2 finecorsa
0
0
DC 24 V, Umax = DC 42 V
Imax = 5 A
106
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.4 Riduttore
5.4.4
Commutazione della gamma di velocità
Nella commutazione della gamma di velocità occorre far attenzione alle seguenti avvertenze:
● Eseguire la commutazione della gamma di velocità solo in condizioni di fermo, ad es.
durante un cambio utensile.
● Durante la commutazione eseguire circa 5 cambi del senso di rotazione al secondo. Le
dentature per la commutazione di solito intervengono già al primo cambio di direzione e
quindi si può ottenere un tempo di commutazione da 300 a 400 ms.
● È opportuno evitare la commutazione senza pendolamento.
● Il motore può essere avviato solo dopo 200 ms dalla fine della commutazione.
● La commutazione deve essere sorvegliata con un relè a tempo.
Se non è stato possibile eseguire il comando di commutazione, dopo 2 s si deve
annullare la procedura di commutazione. Per altri 4 o 5 tentativi prevedere un tempo
limite di 10 s.
$WWLYDUHFRPPXWD]LRQHGHOODJDPPDGLYHORFLWÑ
'HFHOHUDUHLOPRWRUHLQFRUUHQWHWULIDVHGDYHORFLWÑGLHVHUFL]LRD
YHORFLWÑ0DQWHQHUHO
DELOLWD]LRQHUHJRODWRUHVXOFRQYHUWLWRUH
$WWLYDUHODIXQ]LRQH3HQGRODPHQWRPRUVHWWR
8QLWÑGLFRPPXWD]LRQHSHUFRPPXWD]LRQH
JDPPDGLYHORFLWÑ21
/DFRPPXWD]LRQH
GHLUDSSRUWLGLULGX]LRQHÙ
WHUPLQDWDHQWURV"&RQIHUPDGHO
ILQHFRUVD6R6GHO
JUXSSRULGXWWRUH
6Ý
'LVDWWLYIXQ]3HQGRODPHQWR
8QLWÑGLFRPPXWD]LRQHLQGLHWURVXOOD
SRVL]LRQHGLSDUWHQ]D
1R
1R
5LSHWHUH
LOFDPELR
JDPPD
'RSRPVXQLWÑGLFRPPXWD]LRQH2))
(VHJXLWLGD
DWHQWDWLYLGL
FDPELRJDPPD"
GXUDWDFLUFDV
6Ý
&RPPXWD]LRQHGHOODJDPPDGLYHORFLWÑ
QRQDYYHQXWD'LVLQVHULUHLOPRWRUHWULIDVH
&RQWUROODUHO
LPSLDQWR
&RPPXWJDPPDGLYHORFLWÑWHUPLQDWD
Figura 5-7
Sequenza funzionale per una commutazione della gamma di velocità
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
107
Componenti del motore
5.4 Riduttore
Tabella 5- 19 Sequenza di comando nel caso di commutazione di velocità
Commutazione della gamma di velocità
N. contatto del connettore
2
3
4/5 (S1)
5/6 (S2)
DC +24 V
0V
0
0
L
L
0
0
0V
DC +24 V
L
0
0
0
0
L
Nel cambio di rapporto da i2 a i1
a Posizione iniziale (f)
b Processo di commutazione
c Commutazione meccanica eseguita fino alla battuta1)
Nel cambio di rapporto da i1 a i2
d Posizione iniziale (c)
e Processo di commutazione
f Commutazione meccanica eseguita fino alla battuta 1)
L
Contatto chiuso
0
Contatto aperto
1)
Dopo la commutazione, un finecorsa (S1 o S2) invia al controllo un segnale per disattivare l'unità di commutazione
108
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.4 Riduttore
5.4.5
Lubrificazione
Lubrificazione a sbattimento
Controllo del livello olio:
a vista dal vetro spia
Il livello dell'olio dipende dalla posizione di montaggio:
Orizzontale e verticale:
metà del vetro spia1)
Nel caso di posizioni inclinate: contrassegnare sull'indicatore di livello (da prevedere in
aggiunta)
Lubrificanti utilizzabili:
HLP 32 secondo ISO-VG 68
Viti di scarico del lubrificante:
disposte su entrambi i lati
1)
La capacità di olio indicata sulla targhetta è solo un valore indicativo.
Lubrificazione a circolazione
Nei seguenti casi applicativi è necessaria una lubrificazione a circolazione:
● nel funzionamento continuativo
● nel funzionamento in una gamma di velocità per un lungo intervallo di tempo
● nel funzionamento intermittente con brevi intervalli di fermo
Il tipo di lubrificazione a circolazione in questo caso dipende dal livello della temperatura di
esercizio richiesta. Alcune applicazioni richiedono un basso livello della temperatura di
esercizio. Per questo si consiglia una lubrificazione a circolazione. La quantità di olio
lubrificante va da 1 a 1,5 l/min con una pressione dell'olio pari a circa 1,5 bar. Le immagini
del cambio di velocità (vedere sotto) indicano le posizioni di massima per il
riempimento/deflusso dell'olio. I disegni di montaggio riportano le posizioni precise.
Per i seguenti riduttori è necessaria la lubrificazione a circolazione nel caso di montaggio
verticale V1 o V3:
● Riduttore 2K120
● Riduttore 2K121
● Riduttore 2K250
● Riduttore 2K300
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
109
Componenti del motore
5.4 Riduttore
5.4.6
Connessioni lubrificazione a circolazione, altezza d'asse 100
0
/
.
Figura 5-8
(
'
*
)
Connessioni per cambio di velocità con unità di commutazione per grandezza motore
100
Tabella 5- 20 Collegamenti per lubrificazione a circolazione
Pressione max.
Collegamento
recupero olio
M (0,5 dm3/min)
K/L (1,0 dm3/min)
0,2 bar
1,5 bar
1,5 bar
1,5 bar
Collegamento
alimentazione olio
D
senso di rotazione
principale
destrorso 1)
E
senso di rotazione
principale
sinistrorso 1)
Posizione di montaggio
V1
(variante chiusa)
G (1,5 dm3/min)
B5
senso di rotazione principale V1
destrorso
F (1,5 dm3/min)
senso di rotazione principale
sinistrorso
Nota: per determinati riduttori e per le posizioni verticali di installazione V1 o V3 è necessaria una
lubrificazione a circolazione
1)
110
Vista dal motore verso l'azionamento riduttore
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.4 Riduttore
5.4.7
Collegamenti per lubrificazione a circolazione, altezze d'asse 132 e 160
0
2
/
.
(
3
'
1
*
)
+
Figura 5-9
Cambio di velocità con unità di commutazione per grandezze motore 132 e 160
Tabella 5- 21 Collegamenti per lubrificazione a circolazione
Pressione max.
2 bar
Collegamento
recupero olio
H
1,5 bar
P (1,5 dm3/min)
dm3/min)
0,5 bar
1,5 bar
1,5 bar
Collegamento
alimentazione olio
D
senso di rotazione
principale
destrorso 1)
E
senso di rotazione
principale
sinistrorso 1)
Posizione di montaggio
V3
M (0,5
N (1,5 dm3/min)
V1
(variante chiusa)
G (1,5 dm3/min)
senso di rotazione
principale
destrorso
F (1,5 dm3/min)
senso di rotazione
principale
sinistrorso
B5
V1
Nota: per determinati riduttori e per le posizioni verticali di installazione V1 o V3 è necessaria una
lubrificazione a circolazione
Possibile collegamento O addizionale (0,5 dm3/min)
1)
Vista dal motore verso il riduttore
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
111
Componenti del motore
5.4 Riduttore
5.4.8
Dimensioni della flangia
s2
b
e2
d
h
l
Figura 5-10
Dimensioni della flangia
Tabella 5- 22 Dimensioni della flangia
Cambio a
Altezza d'asse
due velocità
112
Dimensioni di connessione standard
h
d
l
b1
e1
a1
2K120
100
100–0,5
38 k6
80
180 j6
215 ± 0,5
–
14 ± 0,2
2K250
132
132–0,5
42 k6
110
250 h6
300 ± 0,5
–
18 ± 0,2
2K300
160
160–0,5
55 k6
110
300 h6
350 ± 0,5
–
18 ± 0,2
s1
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.4 Riduttore
5.4.9
Dimensioni del riduttore
DFHQWUDWXUD
'LPHQVLRQLGHOULGXWWRUH
&ROOHJDPHQWLSHUDOLPHQWD]LRQHGHOO
ROLR
1HLULGXWWRULSHUJUDQGH]]HPRWRUHGDD
8QLW¢GLFRPPXWD]LRQHHOHWWURPDJQHWHGLVROOHYDPHQWR9'&$
9DOYRODGLVILDWR
7DSSRSHULQJUHVVRROLR
$9HWURVSLDSHULOFRQWUROORGHOOLYHOORGHOO
ROLRHUHFXSHURROLRFRQVHQVRGLURWD]LRQHSULQFLSDOHVLQLVWURUVDH
OXEULILFD]LRQHDFLUFROD]LRQH
%9HWURVSLDSHULOFRQWUROORGHOOLYHOORGHOO
ROLRHUHFXSHURROLRFRQVHQVRGLURWD]LRQHSULQFLSDOHGHVWURUVDH
OXEULILFD]LRQHDFLUFROD]LRQH
7DSSRGLVILDWRGHOO
ROLRFRQIRUPDFRVWUXWWLYD,0%
$$OLPHQWD]LRQHROLRFRQVHQVRGLURWD]LRQHSULQFLSDOHGHVWURUVDHOXEULILFD]LRQHDFLUFROD]LRQH
%$OLPHQWD]LRQHROLRFRQVHQVRGLURWD]LRQHSULQFLSDOHVLQLVWURUVDHOXEULILFD]LRQHDFLUFROD]LRQH
$OLPHQWD]LRQHROLRFRQIRUPDFRVWUXWWLYD,09FROOHJDPHQWRLQGLVSHQVDELOH
$OLPHQWD]LRQHROLRFRQIRUPDFRVWUXWWLYD,09
&RQQHWWRUHSURGRWWR+DUWLQJ7LSR+$18
Figura 5-11
Motori e dimensioni del riduttore
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
113
Componenti del motore
5.4 Riduttore
5LGXWWRUHDGXHYHORFLW¢SURVSHWWRGHOOHGLPHQVLRQL
0RWRUH
'LPHQVLRQL LQPP
*UDQ 7LSR
GH]]D
FRVWUXW
WLYD
D
D
D
6FDWRODGL
N
WUDVPLVVLRQH
3+
D
H
J
H
I
I
I
I
I
P
P
P
P
P
ದ
3+
3+
3+
3+
3+
3+
3+
3+
5LGXWWRUHDGXHYHORFLW¢SURVSHWWRGHOOHGLPHQVLRQL
0RWRUH
'LPHQVLRQL LQPP
*UDQ
7LSR
GH]]D
FRVWUXWWLYD
3+
Q
Q
Q
S
S
S
S
T
T
T
T
T
T
T
T
T
ದ
ದ
ದ
ದ
ದ
3+
3+
3+
3+
3+
3+
3+
3+
3+
5LGXWWRUHDGXHYHORFLW¢SURVSHWWRGHOOHGLPHQVLRQL
0RWRUH
'LPHQVLRQL LQPP
*UDQ
GH]]DW
FRVWUXW
WLYD
7LSR
3+
T
T
T
T
T
T
T
T
V
V
V
]
)LOHWWD
WXUD
0
GL
1XPHURGL
ILOHWWDWXUH
[r
3+
3+
0
[r
3+
3+
0
[r
3+
3+
Figura 5-12
114
3+
3+
3+
0RWRUHFRQ
FRQ
ULGXWWRUH
/XQJKH]]D
WRWDOH
N
Riduttori a due gamme
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Componenti del motore
5.4 Riduttore
5.4.10
Scostamenti di misura ammessi
Tabella 5- 23 Scostamenti di misura ammessi
Dimensione
a, b
b1
d, d1
Scostamenti ammessi
fino a 250 mm,
da 250 mm a 500 mm,
da 500 mm a 750 mm
±0,75 mm
±1,0 mm
±1,5 mm
fino a 230 mm,
oltre 230 mm
DIN 7160
j6
h6
fino a 11 mm,
da 11 mm a 50 mm,
oltre 50 mm
DIN 7160
j6
k6
m6
e1
fino a 200 mm,
da 200 mm a 500 mm
±0,25 mm
±0,5 mm
h
da 50 mm a 250 mm DIN 747,
da 250 mm a 500 mm
–0,5 mm
–1,0 mm
fino a 85 mm,
da 85 mm a 130 mm,
da 130 mm a 240 mm
±0,75 mm
±1,0 mm
±1,5 mm
i, i1, i2
u, t, u1, t1
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
secondo DIN 6885 foglio 1
115
Componenti del motore
5.4 Riduttore
116
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
6
Tecnica di collegamento
6.1
Periferia di azionamento SINAMICS
'5,9(&/L4
)URPOHIWWRULJKW
2SWLRQ%RDUGV
0RWRUVZLWK
'5,9(&/L4
LQWHUIDFH
027,21&211(&7SRZHUFDEOH
027,21&211(&7VLJQDOFDEOH
'5,9(&/L4
'5,9(&/L4027,21&211(&7
Figura 6-1
&RQWURO8QLW
6PDUW/LQHRGHU$FWLYH/LQH0RGXOH
'RXEOH0RWRU0RGXOH
6LQJOH0RWRU0RGXOH
6HQVRU
0RGXOH
0RWRUVZLWKRXW
'5,9(&/L4
LQWHUIDFH
*B30B(1BD
7HUPLQDO0RGXOHV
Periferia di azionamento SINAMICS
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
117
Tecnica di collegamento
6.2 Collegamento della potenza
6.2
Collegamento della potenza
Collegamento dei motori
Nota
I motori possono essere alimentati da una tensione del circuito intermedio di fino a
DC 700 V.
Tabella 6- 1
Sommario della tecnica di collegamento per i motori 1PH4
AH
Numero
di morsetti
principali
Sezione max. conduttori
Morsettiera per
sensore di
temperatura
Grandezza collegamento PE/
Larghezza del capocorda
100
3 x M5
16 mm2
3 morsetti
M4/9 mm
132
3 x M5
35 mm2 con capocorda
3 morsetti
M5/15 mm
3 morsetti
M6/15 mm
160
3 x M10
70
mm2 con
capocorda
CAUTELA
Fare attenzione al fabbisogno di corrente del motore per la vostra applicazione! Misurare i
cavi di collegamento in modo adeguato, in conformità con IEC 60204-1.
Cavo di potenza
0RWRUH
Figura 6-2
118
&DSLFRUGDVHFRQGR',1
8
/
9
/
:
/
Cavo di potenza
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Tecnica di collegamento
6.2 Collegamento della potenza
Nota
I cavi sono disponibili in esecuzione UL o per esigenze meccaniche più severe.
Per i dati tecnici vedere il catalogo.
Avvertenze per il collegamento
Nota
La compatibilità elettromagnetica del sistema è assicurata solo utilizzando cavi di potenza
schermati.
Occorre considerare le schermature nel progetto di messa a terra di protezione. I conduttori
non collegati o i cavi a rischio di contatto devono essere collegati a terra. Se i cavi per il
collegamento del freno compresi negli accessori SIEMENS non vengono utilizzati, i relativi
conduttori e gli schermi dovranno essere collegati alla massa dell'armadio. (I cavi non
collegati generano carichi capacitativi!)
AVVERTENZA
Assicurarsi prima di iniziare qualsiasi lavoro sul motore che lo stesso sia disinserito e
protetto contro il riavviamento!
Rispettare i dati tecnici e lo schema di collegamento sul coperchio della morsettiera.
● I cavi motore devono essere a conduttori intrecciati o cavi a tre fili con
conduttore di terra in aggiunta. Le terminazioni dei conduttori devono essere spellate in
modo tale che l'isolamento residuo sia bastante per il capicorda o il morsetto.
● I cavi di collegamento devono essere disposti nella morsettiera in modo tale che il
conduttore di terra abbia una lunghezza adeguata e l'isolamento dei conduttori non venga
danneggiato. Provvedere allo scarico di tiro dei cavi di collegamento.
● Fare attenzione all'osservanza delle seguenti distanze minime: tensioni di collegamento
fino a 500 V: distanza minima 4,5 mm
● Terminato il collegamento occorre controllare quanto segue:
– l'interno della morsettiera deve essere pulito e privo di residui di cavi
– tutte le viti dei morsetti devono essere ben serrate
– devono essere rispettate le distanze minime per la circolazione dell'aria
– gli ingressi dei cavi devono essere protetti con guarnizioni in modo sicuro
– gli ingressi non utilizzati devono essere chiusi e gli elementi di chiusura avvitati a
fondo
– tutte le superfici di isolamento devono essere correttamente preparate.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
119
Tecnica di collegamento
6.2 Collegamento della potenza
Capacità di carico di corrente dei cavi di potenza e di segnale
La capacità di carico di corrente dei cavi in rame con isolamento in PVC/PUR è valida per i
tipi di posa B1, B2 e C alle condizioni di funzionamento continuo riportate nella tabella con
una temperatura ambiente dell'aria di 40 °C. Per altre temperature ambiente, i valori devono
essere ricavati utilizzando i fattori riportati nella tabella di "Fattori di derating".
Tabella 6- 2
Sezione dei cavi e capacità di carico di corrente
Sezione
Capacità di carico di corrente effettiva; AC 50/60 Hz o DC per tipo di posa
[mm2]
B1 [A]
B2 [A]
C [A]
4,3
4,4
Elettronica (secondo EN 60204-1)
0,20
-
0,50
-
7,5
7,5
0,75
-
9
9,5
Potenza (secondo EN 60204-1)
0,75
8,6
8,5
9,8
1,00
10,3
10,1
11,7
1,50
13,5
13,1
15,2
2,50
18,3
17,4
21
4
24
23
28
6
31
30
36
10
44
40
50
16
59
54
66
25
77
70
84
35
96
86
104
50
117
103
125
70
149
130
160
95
180
165
194
120
208
179
225
Potenza (secondo IEC 60364-5-52)
150
-
-
344
185
-
-
392
> 185
I valori si devono desumere dalla norma
Tabella 6- 3
120
Fattori di derating per i cavi di potenza e di segnale
Temperatura ambiente dell'aria [°C]
Fattore di derating secondo EN 60204-1, tabella D1
30
1,15
35
1,08
40
1,00
45
0,91
50
0,82
55
0,71
60
0,58
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Tecnica di collegamento
6.3 Collegamento del segnale
6.3
Collegamento del segnale
È preferibile collegare i sistemi trasduttore al SINAMICS tramite DRIVE-CLiQ.
A tale scopo sono disponibili i motori con interfaccia DRIVE-CLiQ. I motori con interfaccia
DRIVE-CLiQ devono essere collegati direttamente al relativo Motor Module tramite i cavi
MOTION-CONNECT DRIVE-CLiQ disponibili. Il collegamento del cavo MOTION-CONNECT
DRIVE-CLiQ viene eseguito sul motore con grado di protezione IP67. L'interfaccia DRIVECLiQ alimenta il trasduttore motore tramite l'alimentatore integrato CC 24 V e trasmette
direttamente alla Control Unit i segnali del trasduttore motore e della temperatura nonché i
dati elettronici di targa, p. es. il numero di identificazione e i dati nominali (tensione, corrente,
coppia) univoci. Per i diversi tipi di trasduttore il cablaggio viene solitamente effettuato
tramite il cavo MOTION-CONNECT DRIVE CLiQ. Questi motori semplificano la messa in
servizio e la diagnostica essendo possibile l'identificazione automatica del tipo di motore e
del trasduttore.
Collegamento dell'encoder nei motori con DRIVE-CLiQ
I motori con DRIVE-CLiQ possono essere collegati direttamente al relativo Module del
motore attraverso i cavi MOTION-CONNECT DRIVE-CLiQ disponibili. I dati vengono
trasmessi direttamente alla Control Unit.
&ROOHJDPHQWRGHOO
HQFRGHUDWWUDYHUVRO
LQWHUIDFFLD'5,9(&/L4
'5,9(&/L4
DOLPHQWDWRULGD9'&
FDYLGLVHJQDOH'5,9(&/L4
0RWRU
0RGXOH
(
0
a
˽
&DYRGLSRWHQ]D
6,1$0,&66
0RWRUH
Figura 6-3
Collegamento dell'encoder nei motori con DRIVE-CLiQ
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
121
Tecnica di collegamento
6.3 Collegamento del segnale
Cavi nei motori con DRIVE-CLiQ
Per tutti i tipi di trasduttore viene utilizzato con DRIVE-CLiQ lo stesso cavo. Si devono
utilizzare solo cavi confezionati di Siemens (MOTION-CONNECT).
Tabella 6- 4
6FX
☐
Cavo confezionato
002
- ☐DC☐☐
- ☐☐☐
0
↓
↓↓↓
↓
Lunghezza
5 MOTIONCONNECTⓇ500
Lunghezza max. del cavo 100 m
8 MOTIONCONNECTⓇ800
Lunghezza max. del cavo 50 m
Per ulteriori dati tecnici e per i codici relativi alle varie lunghezze consultare il catalogo,
capitolo "Tecnica di collegamento MOTION-CONNECT".
Collegamento dell'encoder nei motori senza DRIVE-CLiQ
I motori senza DRIVE-CLiQ se collegati al SINAMICS S120 richiedono un Sensor Module
Cabinet-mounted. I Sensor Modules interpretano i segnali dei trasduttori del motore o quelli
di trasduttori esterni collegati e li convertono su DRIVE-CLiQ. Nel collegamento ai trasduttori
del motore è possibile anche valorizzare la temperatura del motore mediante i Sensor
Modules. Altre informazioni sono disponibili nel manuale del prodotto SINAMICS.
&ROOHJDPHQWRGHOO
HQFRGHUDWWUDYHUVR6HQVRU0RGXOH&DELQHW
&DYRGLVHJQDOH
'5,9(
&/L4
0RWRU
0RGXOH
(
6HQVRU0RGXOH&DELQHW
0
a
˽
&DYRGLSRWHQ]D
6,1$0,&66
0RWRUH
Figura 6-4
122
Collegamento dell'encoder nei motori senza DRIVE-CLiQ
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Tecnica di collegamento
6.3 Collegamento del segnale
Cavi nei motori senza DRIVE-CLiQ
Si devono utilizzare solo cavi confezionati di Siemens (MOTION-CONNECT).
Tabella 6- 5
6FX
☐
Cavo confezionato
002
- 2AC31
- ☐☐☐
0
↓
↓↓↓
↓
Lunghezza
5 MOTIONCONNECTⓇ500
Lunghezza max. del cavo 100 m
8 MOTIONCONNECTⓇ800
Lunghezza max. del cavo 50 m
Per ulteriori dati tecnici e per i codici relativi alle varie lunghezze consultare il catalogo,
capitolo "Tecnica di collegamento MOTION-CONNECT".
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
123
Tecnica di collegamento
6.3 Collegamento del segnale
124
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
7
Avvertenze sull'uso dei motori
7.1
Trasporto / immagazzinaggio nel periodo precedente all'utilizzo
In caso di prolungati periodi di fermo e durante il trasporto, svuotare completamente il
circuito di raffreddamento, per evitare danni provocati dal gelo e dalla corrosione.
I motori vanno conservati in ambienti interni asciutti e a ridotta presenza di polvere e
vibrazioni (veff < 0,2 mm/s). È opportuno che l'immagazzinaggio dei motori a temperatura
ambiente (da +5 °C a +40 °C) non abbia una durata superiore a 2 anni, di modo che venga
mantenuto l'effetto dell'ingrassaggio dei cuscinetti.
Per il trasporto e l'immagazzinaggio rispettare le altre avvertenze riportate nelle istruzioni
operative.
7.2
Condizioni ambientali
I cuscinetti sono a tenuta su entrambi i lati e dimensionati per una temperatura ambiente
minima di funzionamento di -15 °C.
7.3
Posa dei cavi in ambienti umidi
ATTENZIONE
ULFKWLJ
Figura 7-1
SHUPLWWHG
6,(0(16
6,(0(16
QLFKWHUODXEW
6,(0(16
6,(0(16
6,(0(16
6,(0(16
Se il motore è installato in un ambiente umido, i cavi di potenza e di segnale devono essere
disposti come nella figura seguente.
QRWSHUPLWWHG
Schema di posa dei cavi in ambienti umidi
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
125
Avvertenze sull'uso dei motori
7.4 Posizione di montaggio/forme costruttive
7.4
Posizione di montaggio/forme costruttive
Tabella 7- 1
Definizione delle forme costruttive (secondo IEC 60034-7)
Forma
costruttiva
Rappresentazione
Descrizione
IM B35
impostazione predefinita
IM V15
Forme speciali
Per gli assi sospesi rispettare le condizioni particolari!
IM V36
Per IM V36 tenere presenti i requisiti specifici di
ermetizzazione!
CAUTELA
Devono essere evitati ristagni di liquido sulla flangia, sia in caso di montaggio verticale che
orizzontale. In caso contrario possono risultare compromessi i cuscinetti o il relativo grasso
di lubrificazione.
126
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Avvertenze sull'uso dei motori
7.5 Montaggio
7.5
Montaggio
Istruzioni per il montaggio
AVVERTENZA
Questo motore è azionato elettricamente. Durante il funzionamento dei motori elettrici
alcune parti si trovano necessariamente sotto tensione. Qualsiasi intervento improprio
nell'utilizzo dei motori può quindi causare la morte o gravi lesioni personali o danni
materiali. È perciò indispensabile osservare scrupolosamente tutti gli avvisi di pericolo
indicati in questo capitolo e sullo stesso prodotto.
La manutenzione del motore può essere eseguita solo da personale qualificato.
Prima qualsiasi intervento, il motore dovrà essere scollegato dalla rete e collegato a massa.
Si possono utilizzare solo i ricambi omologati dal costruttore.
È necessario inoltre rispettare rigorosamente gli intervalli di manutenzione e tutte le
prescrizioni indicate nonché le procedure raccomandate per riparazioni o sostituzioni.
AVVERTENZA
Per il trasporto utilizzare tutti i ganci di sollevamento appositamente predisposti!
Tutte le operazioni devono essere eseguite sempre senza tensione nell'impianto!
Il collegamento del motore deve essere conforme allo schema elettrico allegato.
Nella morsettiera occorre fare attenzione che i cavi di collegamento siano disposti
correttamente e isolati rispetto al coperchio della morsettiera.
Nel caso di un motore con freno, dopo aver eseguito il montaggio, controllare che il freno
funzioni perfettamente!
Nota
Il montaggio flangiato è possibile solo con perni filettati e dadi. Distanza M1 per l'inserimento
del dado tra la flangia e la carcassa del motore secondo DIN 42677 (vedere la tabella).
Tabella 7- 2
Montaggio flangiato con perni filettati e dadi
Altezza asse [mm]
M1 [mm]
100
44
132
50
160
65
0RWRUH
0
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
127
Avvertenze sull'uso dei motori
7.5 Montaggio
Uscita cavo su NDE
$+
0RUVHWWLHUD
$+
&ROOHJDPHQWR
GLVHJQDOH
&ROOHJDPHQWR
GLVHJQDOH
0RUVHWWLHUD
&ROOHJDPHQWR
GLSRWHQ]D
&ROOHJDPHQWRGLSRWHQ]D
,OUDFFRUGRDQJRODUHÙFRPSUHVRQHOODIRUQLWXUD
Figura 7-2
Uscita dei cavi
Indicazioni di montaggio
Si devono rispettare le seguenti istruzioni di montaggio:
● In caso di macchine con elevate velocità di rotazione, dopo il montaggio di giunti o
pulegge si raccomanda di ripetere in modo dinamico l'equilibratura dell'intera unità.
● Per il montaggio degli elementi di azionamento utilizzare solo gli strumenti adatti.
Utilizzare la filettatura sull'estremità dell'albero.
● Evitare urti o pressione assiale in corrispondenza dell'estremità dell'albero.
● Soprattutto nel caso di motori con rotazione elevata, è indispensabile assicurare la
stabilità di montaggio della flangia in modo da tenere la frequenza intrinseca della flangia
elevata e comunque al di sopra della frequenza max. di rotazione.
● Un montaggio "morbido" delle flange può influire negativamente sulla qualità
dell'oscillazione del componente dell'azionamento. Per la forma costruttiva IM B35 è
necessario un piedistallo sul lato NDE per il rispetto dei valori limite del livello di
vibrazione.
● Le lamiere di chiusura dei fori delle viti per il piedistallo vanno riapplicate, per il modello
1PH4, dopo il montaggio del motore.
CAUTELA
Devono essere evitati ristagni di liquido sulla flangia sia in caso di montaggio verticale
od orizzontale, in caso contrario si possono verificare danneggiamenti dei cuscinetti o
del relativo grasso di lubrificazione.
128
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Avvertenze sull'uso dei motori
7.5 Montaggio
Frequenze intrinseche di montaggio
Il motore costituisce un sistema soggetto a vibrazioni con una frequenza intrinseca che, per
tutti i motori 1PH, si trova al di sopra dei giri nominali indicati.
Montandolo su una macchina si realizza un nuovo sistema, anch'esso soggetto a vibrazioni
con frequenze intrinseche modificate. Esse possono trovarsi entro la gamma di velocità del
motore.
Questo può provocare oscillazioni indesiderate nella catena di azionamento.
Nota
L'installazione dei motori dovrà essere molto accurata e la base di appoggio dovrà avere
una sufficiente rigidità. Un'ulteriore elasticità dei piani di appoggio può causare delle
risonanze delle frequenze intrinseche di installazione alla velocità di esercizio e valori non
consentiti per le vibrazioni.
L'altezza della frequenza intrinseca di installazione dipende da diversi fattori e viene
influenzata dalle seguenti condizioni:
● elementi di trasmissione della forza (riduttore, cinghia, giunto, pignone ecc.)
● rigidità della macchina sulla quale è montato il motore
● rigidità del motore in corrispondenza dei piedi o della flangia del cliente
● massa del motore
● massa della macchina o massa in corrispondenza del motore
● caratteristiche di smorzamento del motore e della macchina
● Tipo di montaggio, posizione di montaggio (IM B5; IM B3; IM B35; IM V1; ecc.)
● distribuzione della massa del motore, e cioè lunghezza costruttiva, altezza d'asse.
Valori ammessi per le vibrazioni
Dal piano di appoggio del motore e/o dalla catena di azionamento vengono indotte delle
vibrazioni esterne attraverso la carcassa del motore e/o il rotore. Per un funzionamento
ottimale e una lunga durata del motore le vibrazioni non dovrebbero superare il valore limite
specifico del motore. Le vibrazioni indotte dal rotore devono essere ridotte al minimo
attraverso il processo di equilibratura.
Tabella 7- 3
Valori delle vibrazioni
Frequenza di
oscillazione
Valori di vibrazione per AH 100 ... 160
< 6,3 Hz
Direzione delle vibrazioni s
≤ 0,16 mm
6,3 ... 63 Hz
Velocità di vibrazione veff
≤ 4,5 mm/s
> 63 Hz
Accelerazione delle vibrazioni a
≤ 2,55 m/s2
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
129
Avvertenze sull'uso dei motori
7.5 Montaggio
130
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
A
Appendice
A.1
Definizione dei concetti
Coppia massima Mmax
Coppia disponibile per brevi operazioni dinamiche (ad es. accelerazione). Mmax = 2 ∙ MN
Coppia nominale MN
La coppia nominale è la coppia meccanica disponibile nell'albero, che può essere fornita nel
rispetto delle condizioni termiche previste per il modo operativo secondo IEC 60034-1.
Costante termica di tempo Tth
La costante termica di tempo descrive l'aumento di temperatura dell'avvolgimento del motore
con un innalzamento repentino del carico alla coppia S1 consentita. Trascorso l'intervallo Tth
il motore ha raggiunto il 63% della sua temperatura di esercizio finale S1.
Corrente a vuoto Iμ
Si tratta della corrente (valore di fase effettivo) necessaria per azionare il motore a vuoto,
con velocità nominale senza momento del carico. La corrente a vuoto determina la
magnetizzazione del motore nella gamma della velocità base (numero ridotto di giri per
indebolimento di campo).
Corrente massima Imax
Il livello massimo della corrente (valore di fase effettivo) che può essere raggiunto per un
breve intervallo per processi dinamici (ad es. accelerazione) senza danneggiare il motore.
Corrente nominale IN
Si tratta della corrente (valore di fase effettivo) che si manifesta con velocità nominale e
coppia nominale e che può essere fornita nel rispetto delle condizioni termiche del modo
operativo indicato secondo IEC 60034-1.
DE
Drive end = lato azionamento del motore
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
131
Appendice
A.1 Definizione dei concetti
Frequenza nominale fN
Frequenza richiesta per i dati nominali (PN, nN, ecc.).
Funzionamento S1 (funzionamento continuo)
Funzionamento con stato di carico costante, la cui durata è sufficiente per raggiungere la
stabilità termica del motore.
Funzionamento S6 (funzionamento intermittente)
Un funzionamento formato da una successione di cicli dello stesso tipo, ciascuno dei quali
comprende un intervallo con carico del motore costante e un intervallo a vuoto. Salvo
diversa indicazione, la durata dell'inserzione si riferisce a un ciclo di 10 min.
S6-40 % =
4 min sotto carico, 6 min con intervallo a vuoto
S6-60 % =
6 min sotto carico, 4 min con intervallo a vuoto
Modi operativi
I modi operativi sono definiti nella norma IEC 60034, parte 1, Per i modi operativi S1 e S6, in
mancanza di indicazioni particolari viene stabilita una durata massima del ciclo di 10 min.
NDE
Non drive end = lato opposto all'azionamento del motore
Numero di giri nominale nN
Si tratta del numero di giri in base al quale sono definiti la potenza nominale e la coppia
nominale conformemente al modo operativo indicato secondo IEC 60034-1.
Numero di giri per indebolimento di campo con potenza costante n2
Numero di giri massimo raggiungibile per la potenza nominale in funzione del modo
operativo secondo IEC 60034-1.
Potenza nominale PN
La potenza nominale è la potenza meccanica disponibile nell'albero, che può essere fornita
nel rispetto delle condizioni termiche previste per il modo operativo secondo IEC 60034-1.
Tensione nominale UN
Tensione tra due fasi del motore per le quali sono definiti i dati nominali (PN, nN, ecc.). Per
determinare la tensione nominale occorre considerare gli aspetti magnetici (saturazione del
ferro) e termici.
132
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Appendice
A.1 Definizione dei concetti
Velocità massima nmax
Il numero di giri massimo ammesso nmax è determinato meccanicamente. Il numero di giri
massimo nmax non deve essere superato.
CAUTELA
Se il numero di giri nmax viene superato possono verificarsi danni a cuscinetti, anelli di corto
circuito, accoppiamenti stabili, ecc. Pertanto occorre accertarsi che il numero di giri
impostato non superi il limite massimo, utilizzando un comando adeguato o attivando la
sorveglianza del numero di giri nel sistema di azionamento.
Il numero di giri massimo nmax non deve essere mantenuto in modo continuativo. Il numero di
giri deve essere ridotto in funzione del ciclo di carico successivo, a meno che non venga
definito un altro ciclo di carico:
Ciclo di carico per un ciclo di 10 min
3 min
nmax
6 min
2/3 nmax
1 min
Condizione di fermo
Velocità per servizio continuativo nS1
Numero di giri max. consentiti in modo continuativo senza giochi di velocità.
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
133
Appendice
A.2 Bibliografia
A.2
Bibliografia
Elenco delle pubblicazioni del manuale di progettazione
Un elenco aggiornato delle pubblicazioni, con le rispettive lingue disponibili, si trova in
Internet all'indirizzo: www.siemens.com/motioncontrol
Seguire le voci di menu "Support" → "Documentazione tecnica" → "Ordinazione della
documentazione"→ "Documentazione stampata".
Cataloghi
Sigla
Nome del catalogo
NC 61
SINUMERIK & SINAMICS
NC 60
SINUMERIK & SIMODRIVE
PM 21
SIMOTION & SINAMICS
DA 65.3
Servomotori
DA 65.4
SIMODRIVE 611 universal e POSMO
DA 65.10
SIMOVERT MASTERDRIVES VC
DA 65.11
SIMOVERT MASTERDRIVES MC
Documentazione elettronica
134
Sigla
DOC ON CD
CD1
Il sistema SINUMERIK
(con tutti i controlli SINUMERIK 840D/810D e SIMODRIVE 611D)
CD2
Il sistema SINAMICS
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Appendice
A.3 Proposte/correzioni
A.3
Proposte/correzioni
Se durante la lettura del manuale doveste trovare qualche errore di stampa, Vi preghiamo
di volercelo comunicare con questo modulo. Vi siamo altresì grati per eventuali
suggerimenti e proposte di miglioramento.
$
6,(0(16$*
,'70&06
3RVWIDFK
'(UODQJHQ
0LWWHQWH
1RPH
,QGLUL]]RGHOODGLWWDGHOO
XIILFLR
9LD &$3
)D[GRFXPHQWD]LRQH
PDLOWRGRFXPRWLRQFRQWURO#VLHPHQVFRP
KWWSZZZVLHPHQVFRPDXWRPDWLRQVHUYLFHVXSSRUW
/RFDOLW¢
7HOHIRQR
)D[
3URSRVWHHRFRUUH]LRQL
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
135
Appendice
A.3 Proposte/correzioni
136
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
Indice analitico
A
P
Avvertenze ESD, 9
Avvertenze per il collegamento, 119
Posizione di montaggio, 126
Prodotti di terze parti, 9
Progettazione, 29
C
R
Cavo di potenza, 118
Raffreddamento, 39
Collegamento, 118
Collegamento elettrico, 118
Riduttore, 102
Connessioni, 117
Dati tecnici, 105
Curve caratteristiche di potenza e del numero di giri, 64
Lubrificazione, 109
Rischi residui, 10
D
Dimensioni del riduttore, 113
E
Encoder assoluto, 97
Encoder incrementale HTL, 93
Encoder incrementale sen/cos 1 Vpp, 95
Esecuzione dei cuscinetti, 43
F
Forme costruttive, 126
Forze del peso del rotore, 57
H
Hotline, 6
I
Intervallo per la sostituzione dei cuscinetti, 44
S
Segnali di pericolo e di avvertimento, 7
Service & Support, 6
SinuCom, 31
SIZER, 29
Smaltimento, 7
STARTER, 31
Struttura del riduttore, 104
Supporto tecnico, 6
T
Targhetta dei dati tecnici, 26
Tolleranza della coassialità, 58
Tolleranza della planarità, 58
Trasporto, 125
V
Velocità di esercizio in funzionamento continuativo, 44
Vibrazioni provenienti da sorgenti esterne, 129
M
Montaggio, 127
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
137
Motori asincroni 1PH4
Manuale di progettazione, (APH4S), 08/2008, 6SN1197-0AD64-0CP1
138
Siemens AG
Industry Sector
Motion Control Systems
Postfach 3180
91050 ERLANGEN
GERMANY
www.siemens.com/motioncontrol