Azionamenti
Elettrici
Parte 2
Tipologie dei motori
e relativi azionamenti:
Motori a collettore
e Sincroni
Prof. Alberto Tonielli
DEIS - Università di Bologna
Tel. 051-6443024
E-mail: [email protected]
Indice generale del corso
■
Parte 1
Introduzione, richiami di Controlli Automatici ed Elettrotecnica
➨ Generazione elettromagnetica di coppia
➨
■
Parte 2
➨
■
Parte 3
➨
■
Tipologie dei motori elettrici e dei relativi azionamenti
● Motori ed azionamenti C.C.
● Motori ed azionamenti Brushless (sincroni a magneti
permanenti)
● Motori ed azionamenti Asincroni ad Induzione
● Motori passo-passo e coppia
Introduzione al controllo assi
Parte 4
Scelta dell'azionamento
➨ Dimensionamento del motore e dell'amplificatore
➨ Esempi di dimensionamento
➨
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici
2- 2
Indice della Seconda Parte
■
■
Cenni sugli amplificatori di potenza
Motori a collettore (C.C.)
principio di funzionamento
➨ controllo di coppia
➨
■
Motori Brushless a campo trapezoidale
principio di funzionamento
➨ controllo di coppia
➨
■
Motori Brushless a campo sinusoidale
principio di funzionamento
➨ controllo vettoriale di coppia
➨
■
Motori asincroni ad induzione
principio di funzionamento
➨ controllo di velocità in catena aperta e vettoriale di coppia
➨
■
Motori a riluttanza variabile
➨
passo-passo e motori coppia
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici
2- 3
Componenti di un Azionamento
Convertitore di potenza
tensione
di
uscita
convertitore
tensione
di
almentazione
ingresso di
controllo
Prof. Alberto Tonielli - DEIS Università di Bologna
alimentazione
uscita
ingresso di controllo
Azionamenti Elettrici
2- 4
Componenti di un Azionamento
Convertitore di potenza
E
E
A
1
B
3
1
A
B
3
C
5
a
b
2
A
c
4
B
2
A
a)
monofase
Prof. Alberto Tonielli - DEIS Università di Bologna
4
B
6
C
b)
3-fase
Azionamenti Elettrici
2- 5
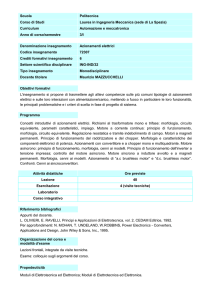
Componenti di un Azionamento
Modulazione a larghezza di impulso (PWM)
Vout = 0
Vout = +20%
A
A
B
B
T
a)
Vout = -20%
A
B
T
b)
Prof. Alberto Tonielli - DEIS Università di Bologna
T
c)
Azionamenti Elettrici
2- 6
Convertitore di Potenza
I
E
Vac
Corrente non sinusoidale
E
distorsione armonica
sulla rete
Problemi:
• rendimento energetico
• malfunzionamenti
• condens. di rifasamento
• trasform. media tensione
A
1
B
2
A
AC/DC
Prof. Alberto Tonielli - DEIS Università di Bologna
3
4
B
DC/AC
Azionamenti Elettrici
2- 7
Componenti di un Azionamento
Power transistors
Tipo
Bipolare
MOS-FET
IGBT
Potenza
< 400KW
< 10KW
< 600 KW
Frequenza
5-8KHz
20-30 KHz
12-20KHz
Corrente
< 500A
< 100A
< 800A
Tensione
< 1400V
< 800V
< 1800V
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici
2- 8
Componenti di un Azionamento
Motori a riluttanza fissa
■
Motore a collettore a magneti permanenti
➨
■
in corrente continua
Motore sincrono a magneti permanenti
Brushless a campo trapezoidale
➨ Brushless a campo sinusoidale
➨
■
Motore asincrono ad induzione
➨
con rotore a gabbia di scoiattolo
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici
2- 9
Motore a collettore
Pro
■
■
■
■
■
Nella versione a MP è un
sistema lineare
Sistema autostabilizzante
Alimentazione singola in
continua
Semplicità di controllo
Molto usato in
automazione
Contro
■
■
■
■
Prof. Alberto Tonielli - DEIS Università di Bologna
Collettore e contatti
striscianti
Genera calore sul rotore
Non idoneo in ambienti
saturi di gas infiammabili
(verniciatura)
velocità massima fissa e
limitata dalla tensione
Azionamenti Elettrici 2- 10
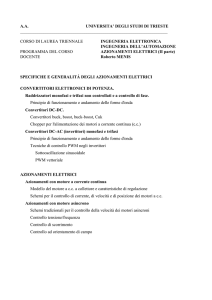
Motore a collettore
Statore
Rotore
N
ia
ia
Rotore:
avvolgimenti in serie
cortocircuitati
ϕe
A
B
S
sezione trasversale
Isolante
Prof. Alberto Tonielli - DEIS Università di Bologna
Conduttore
Azionamenti Elettrici 2- 11
Motore a collettore
Collegamenti degli avvolgimenti di rotore
Azione delle spazzole e del collettore
1’
1
I
2’
2
A
B
+
-
1’
3
1
3’
4
6’
4’
6
5’
5
0°
2
I
6’
A
+
6
5’
2’
B
-
I
4
5
4’
+30°
Prof. Alberto Tonielli - DEIS Università di Bologna
1
1’
2
6’
3
6
3’
I
5’
A
B
+
-
2’
3
3’
5
4’
4
+60°
Azionamenti Elettrici 2- 12
Motore a collettore
N
Caratteristiche strutturali
derivanti dalla
costruzione
■
direzione di Ia costante
➨
ia
ia
■
ϕe
direzione di Ie costante
➨
■
■
S
Prof. Alberto Tonielli - DEIS Università di Bologna
collettore/spazzole
per costruzione
valore di Ia ⇒ variabile
valore di ϕe
ecc. separ. ⇒ variabile
➨ magn. perm. ⇒ costante
➨
Azionamenti Elettrici 2- 13
Motore a collettore - modello
Due circuiti elettrici
Eccitazione
Armatura
N
1 2 d ϕ cj
c m =− ∑ i j
2 j =1 d ϑ
i j = cos t .
ia
ia
d ϕ ce
=0
dϑ
d ϕ ca
dϑ
S
= ϕe
ϑ =0
ϕe
Coppia
F.e.m.
Prof. Alberto Tonielli - DEIS Università di Bologna
c m = − K ϕ e ia
e = − K ϕ eω
Azionamenti Elettrici 2- 14
Motore a collettore - modello matematico
Armatura
Eccitazione
Coppia
motore con
magneti
permanenti
di a
+ K ϕ eω
dt
dϕ e
v e = re i e +
dt
v a = ra i a + L a
c m = − K ϕ e ia
di a
v a = ra i a + L a
+ K mω
dt
cm = −K
Prof. Alberto Tonielli - DEIS Università di Bologna
m
ia
Azionamenti Elettrici 2- 15
Motore a collettore a MP - schema a blocchi
v a − K m ω = ra i a + L a
v i = ra i a + L a
di a
dt
di a
dt
dw
J
= (c m − c r )
dt
v i (s )= ra i a (s )+ sL a i a (s )
va
+
vi
-
1
R+Ls
Jws = (c m − c r
c m = − K m ia
ia
Cm
Km
+
Cr
-
1
Js
)
ω
Km
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 16
Motore a collettore - Velocità massima di rotazione
ϕe
di
v a − K ϕ e ω = ra ia + L a a
dt
va
=
= ω max
ω
se
Kϕ e
Cm = 0
vi = 0
v
+
vi
-
1
R+Ls
ω < ωmax
ia
ω può essere > ωmax
Cm
Km
ω
ωmax
deflussaggio
non con MP
+
Cr
-
1
Js
ω
Km
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 17
Azionamenti per motore c.c. a M.P.
Controllo di coppia = controllo di corrente
Tsp
1
Km
Isp
+
-
PID
V
amplif.
motore
I
ingresso opzionale in coppia
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 18
Sincrono a Magneti Permanenti - Brushless
Pro
■
elevati:
➨
➨
➨
➨
■
■
assenza di spazzole
bassa inerzia
➨
■
■
■
rapporto potenza/peso
affidabilità
capacità di sovraccarico
velocità massima
Contro
■
■
costo relativamente elevato
problemi
➨
➨
■
elevate accelerazioni
calore solo sullo statore
la potenza fornita genera solo
coppia e non campo
funzionamento in ambiente
ostile
Prof. Alberto Tonielli - DEIS Università di Bologna
alle alte temperature
(smagnetizzazione)
in ambienti con presenza di
polveri ferromagnetiche.
velocità massima limitata dalla
tensione
➨
limitata extravelocità con
azionamento vettoriale
Azionamenti Elettrici 2- 19
Sincrono a Magneti Permanenti (Brushless)
■
F1
F2
F2
F1
Prof. Alberto Tonielli - DEIS Università di Bologna
Sezione dello statore di
un motore bifase a due
poli
F1 ⇒ fase #1
F2 ⇒ fase #2
Tutto quanto ricavato nel
seguito vale anche per
motori trifase con neutro
inaccessibile
Azionamenti Elettrici 2- 20
Sincrono a Magneti Permanenti (Brushless)
F1
F2
Se:
Is1 = IM sinωt
Is2 = IM cosωt
⇒ Is =1.41IM cos(ωt-π/4)
1
Is2
Is
Diagramma vettoriale delle
correnti di fase (Is1, Is2) e della
loro risultante Is
2
Is1
F2
F1
assi delle spire equivalenti
ai due avvolgimenti di
statore
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 21
Sincrono a Magneti Permanenti (Brushless)
F1
F2
Sezione del motore
completo
■
N
Is
Struttura opposta al
motore a collettore
magneti permanenti sul
rotore
➨ avvolgimenti sullo statore
ϕr
➨
■
brushless
➨
S
F2
F1
Prof. Alberto Tonielli - DEIS Università di Bologna
senza spazzole
● tutti i motori AC sono
Brushless
Azionamenti Elettrici 2- 22
Brushless a campo trapezoidale
Realizzazione a campo trapezoidale ⇒ almeno tre fasi
0°
60°
120°
180°
240°
300°
360°
ϕca(ϑ)
lineare
con ϑ
ϕcb(ϑ)
non lineare
con ϑ
ϕcc(ϑ)
andamento del flusso concatenato (ϕc)
a corrente costante
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 23
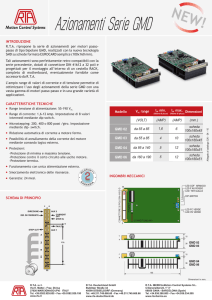
Brushless a campo trapezoidale
0°
60° 120° 180° 240°
300° 360°
ϕca
ϕcb
ϕcc
dϕca
dϑ
dϕcb
dϑ
dϕcc
dϑ
Prof. Alberto Tonielli - DEIS Università di Bologna
n
c m =∑ i j
j =1
d ϕ cj
dϑ
i j = cos t .
Per ogni fase ci sono due
regioni
nelle quali,
con corrente costante, la
coppia è costante.
Alternando le fasi ed i
segni delle correnti si può
ottenere coppia costante
sul giro.
Azionamenti Elettrici 2- 24
Brushless a campo trapezoidale
Caratteristiche principali
■
Progettato per fornire f.c.e.m. trapezoidale
➨
■
La presenza della induttanza di statore impedisce alla
corrente di commutare in tempo nullo
➨
■
■
■
■
sottoutilizzo in termini di inerzia, rendimento e peso
ondulazione di coppia
Dispositivo per la misura della posizione semplice ed
economico
Primo tipo di Brushless in commercio (SIEMENS)
Applicazioni fino a qualche centinaia di Watt
periferiche per calcolatori
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 25
Azionamenti per motore sincrono a M.P
controllo di coppia ⇒ controllo di corrente
schema per pilotaggio di fase singola
Problemi nelle commutazioni di settore
la corrente di fase evolve con dinamica ≠ 0
Tsp
1
km
Isp PID
CUR
V
switch
logic
sgn
PWM
ϑ sector
Inverter ϑ
+
Motor
Hall
sensors
I
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 26
Azionamenti per motore sincrono a M.P
+
di 1
≈ (v − e )
dt L
di
E
≈+
dt
L
i
bassa
velocità
ω≈0
e≈0
+
t
i
media
velocità
ω ≈ ωmax/2
e ≈ E/2
t
i
−
di
E
≈−
dt
L
di
E
≈+
dt
2L
−
di
3E
≈−
dt
2L
+
alta
velocità
t
Prof. Alberto Tonielli - DEIS Università di Bologna
ω ≈ ωmax
e≈E
di
E
⟨⟨+
dt
L
−
di
2E
≈−
dt
L
Azionamenti Elettrici 2- 27
Azionamenti per motore sincrono a M.P
Effetti dinamici della correnti sulle commutazioni
A bassa velocità
Ad alta velocità
i
i
a
a
ϑ=120°
ϑ=120°
t
t
ripple di coppia
i
i
b
b
ϑ=120°
t
ϑ=120°
t
controllo di corrente per ogni fase
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 28
Brushless a campo sinusoidale - modello
Due circuiti elettrici
d ϕ cα
vα = Ri α +
dt
d ϕ cβ
v β = Ri β +
dt
fase 1
fase 2
β
ϕ c α = ϕ α + ϕ r cos ϑ
ϕ c β = ϕ β + ϕ r sin ϑ
dϕ α
− ω ∗ ϕ r sin ϑ
dt
dϕ β
+ ω ∗ ϕ r cos ϑ
v β = Ri β +
dt
α
ϕr
ϑ
vα = Riα +
assi magnetici delle fasi
Per ricavare la coppia si calcola la potenza assorbita dal motore come
v α ∗ iα + v β ∗ i β = P A = PDiss + PIm m + PMecc
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 29
Brushless a campo sinusoidale - modello
Due circuiti elettrici
v α ∗ iα + v β ∗ i β = P A = PDiss + PIm m + PMecc
PDiss = Ri + Ri
2
α
2
β
fase 1
fase 2
β
α
ϕr
ϑ
dϕ β
dϕα
PIm m =
iα +
iβ
dt
dt
PMecc = ω ∗ ϕ r (− iα ∗ sinϑ + iβ ∗ cosϑ )
assi magnetici delle fasi
Cm = k c (− iα ∗ sinϑ + iβ ∗ cos ϑ )
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 30
Brushless a campo sinusoidale - modello
Due circuiti elettrici
Cm = k c (− iα ∗ sinϑ + iβ ∗ cos ϑ )
se I1 = Imcosα
fase 1
β
I2 = Imsinα
c m = k c ∗ I m ( − cos α sin ϑ + sin α cos ϑ )
γ
ϕr
fase 2
α
ϑ
α
I
c m = k c ∗ I m sin (α − ϑ )
se α = ϑ + γ
c m = k c ∗ I m sin γ
cm costante solo se α e ϑ ruotano sincroni
cm = cmmax per una data Im se γ = ±π/2
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 31
Brushless bifase a campo sinusoidale - modello
Equazioni del motore
ϕr
diα
R
vα
= − iα + ( sin ϑ )ω +
dt
L
L
L
diβ
vβ
ϕr
R
= − iβ − ( cos ϑ )ω +
dt
L
L
L
cm = k c ( −i1 sin ϑ + i2 cos ϑ )
riferimento fisso di statore
grandezze sinusoidali
Riferimento rotante sincrono
2
q
grandezze continue
x
ϑ
d
1
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 32
Brushless bifase a campo sinusoidale - modello
Equazioni del motore
ϕr
diα
R
vα
= − iα + ( sin ϑ )ω +
dt
L
L
L
diβ
vβ
ϕr
R
= − iβ − ( cos ϑ )ω +
dt
L
L
L
cm = k c ( −i1 sin ϑ + i2 cos ϑ )
riferimento fisso di statore
grandezze sinusoidali
Riferimento rotante sincrono
2
grandezze continue
q
d
x
ϑ
1
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 33
Brushless bifase a campo sinusoidale - modello
Equazioni del motore
ϕr
diα
R
vα
= − iα + ( sin ϑ )ω +
dt
L
L
L
diβ
vβ
ϕr
R
= − iβ − ( cos ϑ )ω +
dt
L
L
L
cm = k c ( −i1 sin ϑ + i2 cos ϑ )
riferimento fisso di statore
grandezze sinusoidali
Riferimento rotante sincrono
2
q
grandezze continue
d
x
ϑ
1
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 34
Brushless bifase a campo sinusoidale - modello
Equazioni del motore
ϕr
diα
R
vα
= − iα + ( sin ϑ )ω +
dt
L
L
L
diβ
vβ
ϕr
R
= − iβ − ( cos ϑ )ω +
dt
L
L
L
cm = k c ( −i1 sin ϑ + i2 cos ϑ )
di d
R
1
= − id + ω iq + v d
dt
L
L
di q
k eω 1
R
= − iq − ω id −
+ vq
dt
L
L
L
c m = k c ∗ iq
non linearità
Prof. Alberto Tonielli - DEIS Università di Bologna
modello nel
riferimento fisso di statore
grandezze sinusoidali
modello nel
riferimento rotante di flusso
grandezze continue
f.e.m.
Azionamenti Elettrici 2- 35
Brushless a campo sinusoidale - modello
I motori industriali sono tutti trifase
■
le equazioni del motore trifase (a,b,c) si trasformano
nelle stesse equazioni già viste per il motore bifase (1,2)
sostituendo alle induttanze di fase L le induttanze
equivalenti (L-M)
➨
■
M è la mutua induttanza tra due fasi
La deduzione successiva delle equazioni nel riferimento
(d-q) è la medesima
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 36
Brushless sinusoidale
Schema a blocchi
vd
+
+
1
R+Ls
id
Lω iq
se
id=0
di d
R
1
= − id + ω iq + v d
dt
L
L
kω 1
R
iq − ω id − e + v q
dt
L
L
L
C m = k c ∗ iq
di q
iq
ω
Lω id
id
=−
cr
vq
+
-
1
R+Ls
iq
f.e.m.
Motore a collettore
kc
cm
1
J
ω
ϑ
ke
Prof. Alberto Tonielli - DEIS Università di Bologna
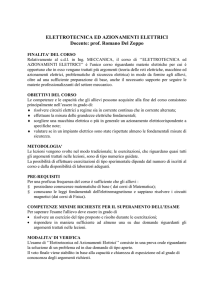
Azionamenti Elettrici 2- 37
Azionamenti per motore sincrono a M.P.
AC Brushless - campo sinusoidale
Controllo ad orientamento di campo (Vettoriale)
Tsp
1
km
Iqsp PID
ρ
Vq
V Inverter
+
Motor
PWM
CUR
Tinv
Idsp=0
PID
I
Vd
CUR
ϑ
RTD
Resolver
A/D
I/O
interface
Id
Iq
ϑ
Tdir
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 38
Azionamenti per motore sincrono a M.P.
AC Brushless - campo sinusoidale
Controllo Vettoriale
■
Occorre un sensore continuo di posizione
➨
■
■
■
■
■
■
Resolver
elevata complessita' computazionale
linearizzazione dei loop di corrente
massime prestazioni dinamiche
velocita' un poco superiore a quella nominale
ottime prestazioni a tutte le velocità (coppia da fermo)
possibilità di cogging a bassa velocità
Prof. Alberto Tonielli - DEIS Università di Bologna
Azionamenti Elettrici 2- 39
Azionamenti
Elettrici
Parte 2
Tipologie dei motori
e relativi azionamenti:
Motori a collettore
e Sincroni
FINE
Prof. Alberto Tonielli
DEIS - Università di Bologna
Tel. 051-6443024
E-mail: [email protected]