SISTEMI DI AVVIAMENTO - REGOLAZIONE DELLA VELOCITÀ - RIFASAMENTO DEI
MOTORI ASINCRONI
Motori per avviamento a inserzione diretta.
Si dicono a inserzione diretta quei motori nei quali la manovra di avviamento consiste nella
semplice chiusura dell'interruttore di linea, mentre la eventuale riduzione, ed il rifasamento
della corrente di spunto sono affidati a dispositivi a funzionamento spontaneo.
Questi motori vengono applicati essenzialmente nei casi in cui la manovra di avviamento deve
ripetersi a brevi intervalli (ad esempio motori per gru, montacarichi, ascensori) oppure quando
il motore deve essere comandato da un interruttore a distanza.
Per i motori di piccolo potenza destinati ad avviarsi a vuoto, o con carico assai ridotto, si può
eseguire senz'altro l'avviamento per inserzione diretta senza alcun dispositivo speciale,
attuando come si dice l'avviamento in corto circuito. Questo metodo di avviamento è tollerato
per potenze fino ad alcuni kW : i motori di questo tipo vengono sempre costruiti con un
normale rotore a gabbia, adeguandone peraltro la resistenza elettrica alle diverse condizioni di
impiego. La corrente di spunto può essere così contenuta entro limiti da 4 a 8 volte la corrente
nominale; data però la piccolo potenza del motore, questa corrente può essere egualmente
sopportata dalla rete di distribuzione senza che essa risenta cadute di tensione tali da recare,
disturbo agli altri utenti. Per il motore d'altra parte, questa punta di corrente non porta alcun
pregiudizio perché dura solo per un tempo assai breve.
Per le potenze maggiori invece è indispensabile in ogni caso limitare in qualche modo la
corrente di avviamento ed aumentare la coppia : volendo in tal caso realizzare ancora
l'avviamento per inserzione diretta è necessario sostituire il reostato di avviamento con
1
manovra a mano, con altri equivalenti, a funzionamento spontaneo.
Questo problema ha avuto varie soluzioni basate su diversi principi ; alcune utilizzano ancora il
rotore avvolto, altre invece utilizzano il rotore gabbia.
2
Il motore con il rotore doppia gabbia è stato ideato dal Boucherot nel 1894.
Questo rotore porta una gabbia di elevata resistenza con le sbarre molto vicine alla periferia del
pacco lamellare e una seconda gabbia di resistenza piccolissima con le sbarre profondamente
immerse nel ferro come e indicato in fig. 1
Fig. 1 - Rotore a doppia gabbia
All'atto dell'avviamento, quando la frequenza delle correnti rotoriche coincide con la
frequenza di linea, la gabbia interna presenta una impedenza assai elevata e le correnti che la
percorrono sono perciò fortemente ridotte : la gabbia esterna invece essendo assai poco immersa
nel ferro ha, una reattanza piccola e perciò, malgrado la sua maggior resistenza, presenta una
impedenza minore. Accade in tal modo che all'alto dell'avviamento prevalente l'azione della
gabbia esterna la quale, data la forte resistenza fornisce la sua massimia coppia allo spunto con
3
corrente relativamente piccola.
Fig. 2 a)
Particolare della
doppia gabbia.
Le due gabbie, per essere diversamente affondate nel ferro, presentano
valori tra loro molto diversi della reattanza di dispersione; essa
reattanza è minima per la gabbia esterna posta vicina al traferro, (in
quanto le linee di forza di cui si contornano le correnti che in essa
circolano si svolgono prevalentemente nell'aria), massima per la
gabbia interna racchiusa nel ferro ove le linee di forza si svolgono,
prevalentemente, nel ferro.
Riassumendo: la gabbia esterna presenta maggior resistenza e minor
induttanza, viceversa l'interna.
La feritoia che congiunge le cave delle due gabbie serve a limitare i
flussi dispersi delle correnti (fig. 2 a), che nel normale funzionamento
del rotore, circolano nella gabbia interna: infatti, se questa mancasse
aumenterebbe in modo eccessivo il flusso disperso (flusso svolgentesi
intorno alle sole barre della gabbia interna); in tutti i casi queste fughe
assorbono potenza reattiva, ciò comporta una diminuzione del fattore
di potenza del motore a doppia gabbia.
La larghezza della, fenditura, oltre the limitare la reattanza di
dispersione della gabbia interna, ha anche lo scopo d'obbligare il flusso
principale a percorrere due volte il traferro perchè, come sappiamo,
quanto maggiore è la riluttanza del circuito magnetico del flusso
disperso, tanto maggiore è l'aliquota del flusso che segue il circuito
magnetico. Vedremo in seguito come le diverse impedenze delle
gabbie influiscano sulle caratteristiche del motore.
4
Rotore a barre alte.
Il rotore di questo motore è provvisto di barre di forma allungata (fig.
2 b) sistemate in cave alte e strette; in esse si determina,
all'avviamento, uno spostamento di corrente entro le barre in modo
analogo quello che si verifica, come vedremo, nel rotore a doppia
gabbia, per cui le barre presentano, ma solamente durante
l'avviamento, una resistenza maggiore alle correnti rotoriche rispetto
all'effettiva loro resistenza.
Fig. 2b -- Rotore a gabbia a barre
alte.
Fig. 2c
Ciò è dovuto al fatto che un conduttore di forte sezione annegato in
una cava, presenta, se percorso da corrente alternata, una resistenza
maggiore di quella determinata dal calcolo (cioè supposto il conduttore
non annegato nel ferro ma immerso nell'aria).
Infatti (fig. 2 c), immaginiamo il conduttore diviso in più porzioni:
la porzione posta in fondo alla cava è contornata da più linee di flusso
disperso (ha maggior reattanza) di quella posta vicino al traferro.
Conseguentemente, la corrente si concentra nella zona di minor
reattanza (zona più fortemente tratteggiata del conduttore, vicina al
traferro); ciò equivale ad una riduzione della sezione utile al passaggio
della corrente, dunque ad un forte accrescimento della resistenza del
conduttore (nella fase dell'avviamento).
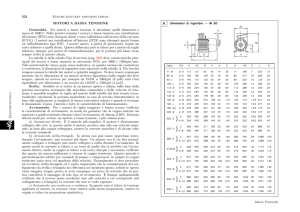
5
Fig. 2 - Caratteristica meccanica del
motore a doppia gabbia.
Man mano che il motore accelera e la frequenza
rotorica diminuisce, le reattanze diventano sempre
pin piccole, finché a regime raggiunto risultano,
quasi trascurabili : in tali condizioni diventa allora
prevalente l'azione della gabbia interna, la quale
data la minima resistenza conferisce al motore un
buon rendimento e uno scorrimento limitato.
La caratteristica meccanica di questi motori
assume così una forma der tipo indicato in fig. 2.
Essa risulta dalla somma delle ordinate delle curve relative alle due gabbie, determinate ciascuna
dai valori della rispettiva, resistenza e reattanza.
I risultati che si ottengono dipendono in modo essenziale dal numero, e dalla forma dei fori delle
due gabbie e dalle dimensioni della fenditura che li unisce: questa fenditura ha lo scopo di
diminuire la dispersione di flusso attorno alla gabbia interna, affinché non presenti una reattanza
eccessiva. Solo proporzionando convenientemente il numero e la forma dei canali il motore a
doppia gabbia può rispondere in modo adeguato agli scopi prefissi (limitazione della corrente di
spunto e aumento della coppia) e ciò spiega l'insuccesso dei primi tentativi.
La corrente di inserzione di questi motori rimane contenuta entro limiti da 3 a 6 volte la corrente
normale di pieno carico, ma la coppia di spunto raggiunge valori da 2 a 3 volte la coppia
nominale.
6
Su principio analogo sono basati i motori con gabbia a sbarre alte. In essi si ha un'unica gabbia
le cui sbarre penetrano profondamente a guisa di coltello nella massa del ferro. La parte più
interna di tali sbarre presenta allora una induttanza maggiore che non la parte più vicina al
traferro: per tale motivo il comportamento di questi motori si presenta in certo senso analogo a
quello dei motori a gabbia doppia. L'avviamento per inserzione diretta può essere realizzato
anche con i motori ad anelli provvisti di un reostato di avviamento esterno al motore.
L'operazione manuale di esclusione del reostato viene in tal caso sostituita dall'azione di
opportuni contattori che mettono via via in corto circuito le varie sezioni del reostato (raramente
più di due), secondo una successione temporale prestabilita regolando convenientemente i
rispettivi relè a tempo.
7
Avviamento con tensione ridotta dei motori in corto circuito.
I sistemi d'avviamento con tensione ridotta si applicano essenzialmente per poter estendere
l'impiego dei motori con il rotore a gabbia anche alle potenze elevate: ciò in considerazione del
fatto che questo tipo di rotore presenta dei vantaggi di semplicità, robustezza e rendimento che
non si riscontrano in nessun altro motore. Il rotore a gabbia ha inoltre il pregio di adeguarsi al
funzionamento sotto un numero di poli qualunque, mentre il rotore avvolto non può funzionare se
non è accoppiato ad uno statore avvolto per lo stesso numero di poli: questa considerazione
acquista la massima importanza quando si vuol eseguire la commutazione del numero dei poli,
per ottenere un cambio di velocità. Si può dire quindi che il motore a gabbia rappresenterebbe
sotto molti aspetti il motore ideale, se non avesse il grave inconveniente di un cattivo
comportamento all’atto dell'avviamento.
Il sistema d'avviamento con tensione ridotta risolve facilmente il problema di limitare la
corrente assorbita, ma la limitazione ottenuta in questo modo va tutta a scapito della coppia di
spunto che diminuisce in proporzione al quadrato della tensione. Questo sistema può essere
perciò applicato solo impiegando motori a doppia gabbia i quali, essendo in grado di fornire la
loro massima coppia allo spunto, consentono di conseguire una coppia di avviamento
sufficientemente elevata anche eseguendone l’inserzione a tensione ridotta. Per gli azionamenti di
potenze rilevanti (fino a qualche centinaio di kW) la tensione ridotta viene generalmente ottenuta
mediante un autotrasformatore a prese multiple.
All'atto dell'avviamento si applica al motore la tensione minore, e man, mano che il motore
accelera si passa alle prese successive fino ad applicare piena tensione, dopo di che
l'autotrasformatore d'avviamento viene escluso.
8
Fig. 4 - Avviamento con
autotrasformatore
Questi autotrasformatori essendo destinati ad un servizio di durata
assai breve vengono sempre costruiti, per ragioni di economia, con
induzioni nel ferro particolarmente elevate e con densità di corrente
negli avvolgimenti assai rilevanti (fino a 20 A/mm2). Essi vengono
costruiti generalmente sul tipo dei normali autotrasformatori trifasi a
stella; il numero delle prese viene limitato in genere a non più di
due, con tensioni ridotte rispettivamente dell'ordine del 55 e 80%
della tensione normale. Il passaggio da una presa all'altra viene
eseguito mediante commutatori manovrabili sotto carico.
Talvolta si ritiene sufficiente per l’avviamento una sola presa
intermedia e in tal caso si può applicare lo schema di fig. 4.
All'avviamento si tiene aperto l’interruttore M e chiuso invece
l’interruttore A: il motore si avvia, così con la tensione ridotta ;
raggiunto il pieno regime si apre l’interruttore A, che scioglie il
centro stella dell'autotrasformatore e poi si chiude l’interruttore M
che allaccia il motore direttamente alla linea.
Questo schema ha il vantaggio di eseguire la commutazione della tensione senza interrompere
il circuito del motore. Quando si apre l'interruttore A infatti, e prima di chiudere M, i1 motore
rimane alimentato dalla linea attraverso alla frazione superiore degli avvolgimenti
dell'autotrasformatore, i quali funzionano, come tre reattanze in serie allo statore: chiudendo
l'interruttore M queste tre reattanze vengono chiuse in corto circuito.
9
Fig. 5 - Avviamento con
autotrasformatore a V.
Qualche volta gli autotrasformatori di avviamento sono composti con un nucleo trifase sul quale
sono avvolte però due sole fasi, mentre la terza colonna rimane libera: in tal caso le due fasi
vengono collegate a V a costituire cioè un triangolo mancante di un lato, secondo lo schema di
fig. 5. Le manovre procedono come nel caso precedente: i due interruttori A e M possono
eventualmente essere combinati in un commutatore a due posizioni di « avviamento »
e « marcia ».
10
Per quanto riguarda le correnti in gioco all'atto dell'avviamento, basta osservare che se la
tensione iniziale di avviamento viene ridotta a metà, il motore assorbe una corrente di spunto pari
alla meta della corrente di corto circuito corrispondente alla tensione normale; la corrente
primaria dell'autotrasformatore è a sua volta metà della corrente al secondario e perciò in
definitiva, impiegando un autotrasformatore che riduca la tensione a metà, la corrente di spunto
sulla linea viene ridotta a un quarto della corrente di corto circuito del motore.
In generale, se K e il rapporto di trasformazione dell'autotrasformatore, la corrente di spunto
assume il valore :
I cc
Ia = 2
K
Per i motori a doppia gabbia con potenze fino a qualche decina di kW, in luogo
dell'autotrasformatore si usa spesso i1 sistema di avviamento stella-triangolo; il motore viene
costruito cioè per funzionare normalmente con le fasi statoriche collegate a triangolo, per modo
che la tensione normale di ogni fase è rappresentata dall'intera tensione di linea ; all'avviamento
invece si collegano le fasi dello statore a stella e così, restando invariata la tensione di linea, ogni
fase viene a funzionare con una tensione ridotta pari alla tensione normale divisa per √3. La
corrente in linea viene in tal modo ridotta a un terzo del valore che si avrebbe eseguendo
l'avviamento con la tensione normale.
Con il collegamento a stella infatti si ha in linea una corrente pari a quella di fase, e questa è √3
volte minore della corrente di fase relativa al collegamento a triangolo, essendo in tale rapporto
ridotta in tensione ; d'altra parte la corrente di fase del triangolo è √3 volte minore di quella di
linea.
11
Fig. 6 - Avviamento stella-triangolo
Lo scambio delle connessioni viene eseguito con la
manovra di un commutatore che può essere costruito ad
esempio in base allo schema di fig. 6. Sulla morsettiera
del motore P1, P2, P3 rappresentano i principi delle tre
fasi dello statore ed F1, F2, F3 le fini corrispondenti. Per
eseguire l'avviamento si chiude prima il commutatore C
verso il basso realizzando il collegamento a stella sulle
tre fini col centro in 0. Dopo che il motore è avviato si
chiude il commutatore C verso l'alto realizzando così il
collegamento a triangolo. Durante la commutazione
l'alimentazione del motore viene interrotta: la manovra
deve essere quindi sufficientemente rapida, affinché il
motore non perda velocità. Qualche volta la riduzione
della tensione di avviamento viene ottenuta
semplicemente con l'inserzione di un reostato in serie
allo statore alto a provocare una caduta di tensione
conveniente (lo stesso risultato può, essere ottenuto
anche sostituendo alle resistenze opportune reattanze a
nucleo di ferro che risultano più economiche). Con questo sistema di avviamento però, la
corrente in linea coincide necessariamente con la corrente assorbita dal motore, mentre con
l'impiego degli autotrasformatori la corrente in linea è quella assorbita dal motore divisa per il
rapporto di trasformazione; inversamente, se si fa il confronto a pari corrente di linea,
l'avviamento mediante reostato sullo statore determina una minore corrente nel motore, 12
e perciò una minor coppia, che non l'avviamento con autotrasformatore.
Regolazione della velocità dei motori asincroni.
La velocità di rotazione di un motore asincrono è legata alla velocità di sincronismo n1, ed allo
scorrimento s dalla nota relazione: n2 = (1-s) • n1
Ne risulta che la regolazione di questa velocità può essere ottenuta o provocando una opportuna
variazione dello scorrimento, oppure variando la velocità di rotazione del campo rotante n1.
Fig. 7 - Regolazione della velocità con resistenze in
serie al rotore.
a)REGOLAZIONE MEDIANTE REOSTATO
IN SERIE AL ROTORE
Si è visto che il valore dello scorrimento che il
motore deve assumere per sviluppare una data
coppia motrice dipende dalla resistenza dei
circuiti rotorici. Il mezzo più semplice per
provocare un aumento dello scorrimento, e perciò
una diminuzione della velocità del motore,
consiste nell'aggiungere una resistenza opportuna
in serie al rotore.
Come è noto si viene a modificare in tal modo la forma della caratteristica meccanica del motore,
la quale passa dalla forma (a) indicata in figura 7 alle forme (b), (c) e simili, a seconda del valore,
della resistenza aggiunta al rotore; col rotore in corto circuito (curva a) il motore sviluppa la
coppia C girando alla velocità n2, mentre sulle caratteristiche (b) e (c) ottenute con l'aggiunta
delle resistenze, il motore sviluppa la stessa coppia girando alle velocità ridotte n’2 e n’’2. 13
Si deve subito osservare che la riduzione di velocità che si ottiene con l'aggiunta di una
determinata resistenza dipende dal valore della coppia resistente applicata all'albero: essa è
notevole ai carichi più elevati, diventa invece pressoché nulla in corrispondenza dei carichi
ridotti.
Oltre a ciò si ha il grande inconveniente che qualunque riduzione di velocità ottenuta con
l'aggiunta di resistenze in serie al rotore si traduce in una perdita proporzionale di potenza che
viene dissipata in calore nelle resistenze stesse: così ad esempio se la velocità deve essere
ridotta del 20 %, vuol dire che il 20% della potenza che il campo rotante trasmette al rotore
deve dissiparsi in calore nel reostato.
Si può dire quindi che la regolazione con resistenze in serie al rotore è praticamente consigliabile
solo nei casi in cui si richiede un campo di regolazione assai limitato contenuto ad esempio entro
i limiti dal 10 al 20%, oppure nei casi in cui il funzionamento a velocità ridotta sia richiesto solo
per pochi minuti a intervalli assai rari.
All’atto pratico i motori destinati a questi servizi vengono costruiti a spazzole fisse (non
sollevabili) e come reostato di regolazione utilizzano lo stesso reostato di avviamento,
opportunamente studiato.
[Nei motori destinati a subire del violenti sovraccarichi a breve durata (come sono ad esempio i
motori da laminatoi) si ricorre spesso ad una tempestiva inserzione di resistenze in serie al rotore,
allo scopo di provocare un brusco rallentamento che consente al volano di intervenire
efficacemente a spuntare i sovraccarichi ; si evita in tal modo che questi si traducano in violente
punte di potenza sulla linea].
14
b) REGOLAZIONE DELLA VELOCITÀ MEDIANTE VARIAZIONE DELLA
FREQUENZA O PER VARIAZIONE DEL NUMERO DEI POLI
Dal punto di vista del rendimento il sistema più conveniente di regolazione della velocità dei
motori asincroni è quello di variare direttamente il numero di giri del campo rotante e cioé la
velocità di sincronismo n1. Siccome questa è espressa dalla rota relazione n1 = 60f /p, è chiaro che
essa può essere variata solo variando la frequenza di alimentazione del motore, o variando il
numero dei poli.
La regolazione per variazione di frequenza può essere applicata quando il motore è
comandato direttamente da un proprio alternatore, oppure mediante un apposito gruppo
convertitore di frequenza che può essere oggi realizzato in forma di un alimentatore statico a
diodi controllati.
In tal caso si può conseguire una variazione lineare della velocità entro limiti abbastanza
estesi c la velocità rimane praticamente indipendente dal carico del motore. Occorre solo
ricordare che tutte le variazioni di frequenza devono essere accompagnate da variazioni
proporzionali della tensione, se si vuole che il flusso resti costante.
Di applicazione più semplice e più comune è il sistema di regolazione the consiste nel variare
il numero di poli del motore ; questo sistema tuttavia consente di realizzare solo poche velocità
diverse: in genere si ha una marcia a velocità normale e una o due marce a velocità ridotta.
In questi casi è particolarmente indicato l'impiego del rotore a gabbia di scoiattolo il quale
potendo funzionare sotto qualunque numero di poli, non richiede nessuna costruzione speciale.
Se il motore deve essere provvisto invece di un rotore avvolto, la costruzione si complica
notevolmente perché ogni commutazione del numero di poli che viene eseguita sullo statore deve
essere accompagnata da una commutazione analoga sul rotore.
15
La commutazione del numero dei poli viene realizzata costruendo l’avvolgimento in modo da
ottenere il cambio del numero dei poli con la semplice variazione di poche connessioni che sono
riportate all'esterno del motore.
Nella fig. 8 è rappresentata ad esempio una fase d'avvolgimento che consente la commutazione
da 4 a 8 poli : la fase è divisa in due parti identiche a matasse alternate (una parte comprende la
prima c la terza matassa, l'altra invece comprende la seconda e la quarta). Collegando queste due
parti in serie fra loro e alimentando i due estremi P1 ed F2 come in figura a) l'avvolgimento
produce 8 poli. Collegando invece le due parti in parallelo fra loro in modo che la corrente in una
di esse risulti rovesciata rispetto al verso precedente come in figura b) il numero dei poli si riduce
a 4. L'avvolgimento completo del motore comprende naturalmente tre fasi identiche le quali
vengono collegate fra loro a triangolo nella connessione per 8 poli, mentre vengono collegate a
stella quando si eseguisce la commutazione per 4 poli; in tal modo, restando invariata la tensione
di linea, l'induzione nel ferro non subisce che una variazione assai limitata.
Fig. 8 - Schema d'avvolgimento commutabile da otto a quattro poli: a) connessioni per otto poli ; b) connessione per
quattro poli.
Lo schema d'avvolgimento considerato può essere esteso a qualunque numero di poli con due
mezze fasi in parallelo per ottenere un numero di poli doppio con le mezze fasi in serie: lo
schema consente quindi in ogni caso una variazione della velocità nel rapporto da 1 a 2. 16
C) CALLEGAMENTO IN CASCATA DI DUE MOTORI.
Il collegamento in cascata fra due motori asincroni si realizza calettando i due motori sullo
stesso asse e alimentando lo statore del secondo col rotore del primo: lo statore di questo riceve
l'alimentazione dalla rete mentre il rotore del secondo motore fa capo al reostato di avviamento
del gruppo come è indicato nella fig. 9.
Con questa disposizione il motore allacciato alla rete funziona in parte come motore ed in parte
come trasformatore di alimentazione del secondo motore.
Indicando con p1, il numero delle coppie di poli del motore principale e con f1 la frequenza di
linea, la velocità del campo rotante è pari a n1= 60 f1 / p1; d'altra parte se s1 è lo scorrimento di
questo motore, la frequenza delle sue correnti rotoriche è data da f2 = s1 • f1
Siccome questa è anche la frequenza di alimentazione del secondo motore, la velocità del
campo rotante di quest'ultimo sarà n2 = 60f2 / p2 essendo p2 il numero delle coppie di poli del
motore stesso.
Fig. 9 - Schema del collegamento in cascata.
17
Ora è chiaro che essendo i due motori accoppiati sullo stesso asse, la massima velocità che può
raggiungere il gruppo quando esso funziona a vuoto rappresentata dalla velocità di sincronismo
del secondo motore, la quale rappresenta perciò la velocità di sincronismo del gruppo: questa
velocità rimane così determinata dalla relazione
60 ⋅ s 1 ⋅ f 1
n2 =
quando al posto di s1 si ponga l’espressione
Risulta allora :
n2 =
s1 =
n1 − n 2
n1
p2
60 ⋅ f 1 n 1 − n 2
⋅
p2
dalla quale si ricava n 2 =
n1
60 ⋅ f 1 ⋅ n 1
n 1 ⋅ p 2 + 60 ⋅ f 1
Dividendo numeratore e denominatore per n1, risulterà così:
60 ⋅ f 1
=
E poiché 60 • f1 / n1 = p1, si ha infine: n 2
p 2 + p1
n2 =
60 ⋅ f 1
60 ⋅ f 1
p2 +
n1
Si ottiene così il risultato che la velocità di sincronismo del gruppo costituito da due motori
accoppiati in cascata coincide con quella di un unico motore avente un numero di poli pari
alla somma del numero di poli dei due motori.
18
Così ad esempio se i due motori hanno lo stesso numero di poli la velocità di sincronismo del
gruppo, e cioè la velocità a vuoto, sarà la metà di quella di ciascun motore funzionante da solo.
In generale si può dire quindi che disponendo di due motori asincroni aventi un numero di coppie
di poli pl e p2, disposti in modo da poter realizzare indifferentemente l’accoppiamento in cascata
oppure il funzionamento singolo, si possono ottenere a vuoto le tre velocità espresse da
60 ⋅ f 1
p1
,
60 ⋅ f 1
p2
,
60 ⋅ f 1
p1 + p 2
Quando il gruppo in cascata funziona a vuoto, alla velocità di sincronismo n2 = 60 • f1 / (p1 + p2),
nel rotore del motore secondario non circola nessuna corrente; lo statore assorbe invece dal rotore
del motore principale la sola corrente magnetizzante che, a parte le perdite, e totalmente swattata:
lo statore del primo motore viene quindi ad assorbire in definitiva dalla linea sia la corrente
magnetizzante propria che in corrente magnetizzante relativa al secondo motore.
[Quest'ultima è fornita in realtà dal rotore del motore principale, il quale però funziona a questo
riguardo come il secondario di un trasformatore e perciò richiama sul primario per reazione una
corrente corrispondente].
19
Caricando il gruppo esso rallenta, e in conseguenza dello scorrimento che ne risulta vengono a
circolare nei due motori le correnti attive che sviluppano la complessiva coppia motrice. Se si fa
astrazione dalle perdite, la potenza meccanica totale sviluppata dal gruppo è fornita dai due
motori in parti proporzionali al rispettivo numero di poli.
Il primo motore assorbe infatti dalla linea l'intera potenza sviluppata dal gruppo, ma questa
potenza si divide in due parti : una parte è proporzionale alla velocità di rotazione del motore e
questa si trasforma direttamente in lavoro meccanico, mentre l'altra invece che risulta
proporzionale allo scorrimento del motore stesso viene trasferita al secondo motore che la
trasforma a sua volta in lavoro meccanico sull'asse : essendo n2 la velocità di sincronismo del
gruppo e n1 la velocità del campo rotante del primo motore, le due parti stanno così fra loro nel
p
n2
rapporto
il quale coincide in base alle formule precedenti col rapporto 1
n1 − n 2
p2
Così se il primo motore ha 8 poli mentre il secondo ne ha 4, il primo svilupperà i 2/3 della
potenza totale mentre l'altro ne svilupperà 1/3 soltanto.
In ogni caso però l'intera potenza deve passare attraverso alla prima macchina la quale
funziona in parte come motore e in parte come trasformatore di alimentazione del secondo
motore; questo fatto abbassa notevolmente il rendimento del gruppo e ne peggiora il fattore di
potenza.
L'accoppiamento in cascata di due motori asincroni ha trovato le applicazioni più importanti
nella trazione elettrica trifase.
20