XtrapulsCD1-a
Azionamento digitale
per
motori brushless
1
XtrapulsCD1-a
ATTENZIONE
!
Questo manuale, descrive un azionamento adatto al controllo di motori brushless servo sinusoidali.
L'immagazinamento, la movimentazione e la messa in servizio richiedono la conoscenza dei dettagli
tecnici e la lettura obbligatoria del manuale, prima di procedere con l'installazione.
Le procedure di manutenzione dovrebbero essere eseguite solo da tecnici altamente qualificati che
hanno buone conoscenze di elettronica e dei sistemi servo a velocità variabile (EN 60204-1) e dell' uso
dell' apparecchiature appropriate .
La conformità alla norma CE è valida solo se gli azionamenti sono installati secondo le procedure descritte nel
manuale déistruzione. Viene declinata ogni responsabilità nel caso l'utilizzatore non rispetti le raccomandazioni
contenute nel manuale.
Qualsiasi contatto con parti elettriche, anche dopo lo spegnimento, può essere pericoloso. Attendere
almeno 5 minuti dopo lo spegnimento prima di maneggiare gli azionamenti (una tensione redua di diverse
centinaia di Volt, può rimanere nel drive per diversi minuti)
INFORMAZIONI ESD (scariche elettrostatiche)
Gli azionamenti INFRANOR sono concepiti per essere meglio protetti contro le scariche
elettrostatiche. Tuttavia, alcuni componenti sono particolarmente sensibili e possono essere
danneggiati se gli amplificatori non sono adeguatamente stoccati e maneggiati.
STOCCAGGIO
-
Gli amplificatori devono essere conservati nella loro confezione originale.
Una volta presi dalla confezione originale, devono essere posizionati su una delle loro
superfici metalliche piane o su una piastra di dissipazione o su un supporto
elettrostaticamente neutro.
Evitare il contatto tra i connettori dell'azionamento e il materiale con potenziale elettrostatico
(film di plastica, poliestere, tappeti ...).
MANIPOLAZIONE
-
Se non sono disponibili i dispositivi di protezione (scarpe di antistatiche o braccialià, gli
azionamenti devono essere toccati solo sulla loro parte metallica.
Non entrare in contatto con i connettori dell'azionamento.
SMALTIMENTO
Al fine di rispettare la direttiva 2002/96/CE del Parlamento Europeo, e del Consiglio del 27
gennaio 2003 sui rifiuti di apparecchiature elettriche ed elettroniche (RAEE), su tutti i dispositivi
INFRANOR è presente una vignetta che simboleggia unbidone della pattumiera barrato, come
mostrato in appendice IV della direttiva 2002/96/CE.
Questo simbolo indica che i dispositivi INFRANOR devono essere smaltiti mediante smatimento
selettivo e non con i rifiuti.
INFRANOR non si assume alcuna responsabilità per danni fisici o materiali, causati da un uso improprio o da
descrizioni errate degli articoli ordinati.
Qualsiasi intervento sugli articoli, che non è specificato nel manuale, Infranor provvederà a far decadere la
garanzia.
INFRANOR si riserva il diritto di modificare le informazioni contenute in questo manuale senza preavviso.
© INFRANOR, Gennaio 2014. Tutti diritti riservati.
Edizione: 8.15
2
XtrapulsCD1-a
Contenuti
PAGINA
CONTENUTI ........................................................................................................................................... 3
CAPITOLO 1 - DESCRIZIONE GENERALE .......................................................................................... 6
1 - INTRODUZIONE ............................................................................................................................. 6
2 - DESCRIZIONE / CONFORMITA ..................................................................................................... 6
2.1 - DESCRIZIONE GENERALE .................................................................................................... 6
2.2 - CONFORMITÀ E CERTIFICAZIONE "CE" .............................................................................. 7
2.3 - REFERIMENTO ALLA MARCATURA "UL" ............................................................................ 7
3 - ALTRI DOCUMENTI ....................................................................................................................... 7
CAPITOLO 2 - SPECIFICHE .................................................................................................................. 8
1 - DATI TECNICI ................................................................................................................................. 8
1.1 - AZIONAMENTO XTRAPULS CD1-a-230/I .............................................................................. 8
1.2 - AZIONAMENTO XTRAPULS CD1-a-400/I MONOASSE ........................................................ 8
1.3 - SPECIFICHE COMUNI TRA GLI AZIONAMENTI XTRAPULS CD1-a-230/I E XTRAPULS
CD1-a-400/I ...................................................................................................................................... 9
2 - DIAGRAMMA A BLOCCHI ............................................................................................................ 12
3 - ALLARMI ....................................................................................................................................... 12
3.1 - INDICAZIONE ALLARMI ........................................................................................................ 12
4 - DIMENSIONI ................................................................................................................................. 14
4.1 - AZIONAMENTO XTRAPULS CD1-a-230/I ............................................................................ 14
4.2 - AZIONAMENTI XTRAPULS CD1-a-400/DA 1,8 A 7,2 A ....................................................... 14
4.3 - AZIONAMENTO XTRAPULS CD1-a-400/14 ......................................................................... 14
4.4 - AZIONAMENTI XTRAPULS CD1-a-400/30/45/70 E 90 A ..................................................... 14
4.5 - RESISTENZA DI FRENATURA dp 100/100, dp 200/100, dp 50/200, dp 33/280 E dp
16,5/560 .......................................................................................................................................... 15
5 - FISSAGGIO ................................................................................................................................... 16
5.1 - AZIONAMENTO XTRAPULS CD1-a-230/I ............................................................................ 16
5.2 - AZIONAMENTI XTRAPULS CD1-a-400/DA1,8 A A 7,2A ...................................................... 16
5.3 - AZIONAMENTO XTRAPULS CD1-a-400/14 ......................................................................... 16
5.4 - AZIONAMENTI XTRAPULS CD1-a-400/30/45/70 E 90 A ..................................................... 16
6 - INSTALLAZIONE MULTIASSE NELL'ARMADIO ......................................................................... 17
6.1 - AZIONAMENTO XTRAPULS CD1-a-230/I ............................................................................ 17
6.2 - AZIONAMENTI XTRAPULS CD1-a-400/DA 1,8 A 7,2 A ....................................................... 17
6.3 - AZIONAMENTO XTRAPULS CD1-a-400/14 ......................................................................... 17
6.4 - AZIONAMENTI XTRAPULS CD1-a-400/30/45/70 E 90 A ..................................................... 17
CAPITOLO 3 - INGRESSI-USCITE ...................................................................................................... 18
1 - POSIZIONE DEI CONNETTORI ................................................................................................... 18
1.1 - CONNETTORI SULL'AZIONAMENTO .................................................................................. 18
2 - X1: CONNETTORE RESOLVER (SUB D 9 PINS FEMMINA) ............................................................. 18
3 - X2: INGRESSI/USCITE LOGICHE E SEGNALI ENCODER SIMULATO (SUB D 25 PINS MASCHIO)
........................................................................................................................................................... 19
3.1 - SPECIFICHE INGRESSI ANALOGICI: CV+, CV-, limitazione corrente ................................ 20
3.2 - SPECIFICHE INGRESSI LOGICI ENABLE, FCP, FCN, RESET, CVO, CI ........................... 20
3.3 - SPECIFICHE SEGNALE USCITA RELE' "AOK" ................................................................... 20
3.4 - SPECIFICHE USCITE ENCODER ......................................................................................... 20
3.5 - SPECIFICHE USCITE ANALOGICHE ................................................................................... 21
4 - X3: INGRESSO ENCODER .......................................................................................................... 21
4.1 - X3 INGRESSO ENCODER INCREMENTALE TTL & HES (Sub D 25 pins femmina) .......... 21
4.2 - X3 CONNETTORE PER INGRESSO INCREMENTALE SIN/COS & HES (Sub D 25 pins
femmina) ......................................................................................................................................... 22
4.3 - X3 CONNETTORE PER ENCODER SIN/COS ASSOLUTO SU UN GIRO (Sub D 25 pins
femmina) ......................................................................................................................................... 23
Contenuti
3
XtrapulsCD1-a
4.4 - X3 CONNETTORE PER L'EMULAZIONE DI MOTORE PASSO-PASSO (Sub D 25 pins
femmina) ......................................................................................................................................... 24
5 - X5: CAVO SERIALE (SUB D 9 PINS MASCHIO) ................................................................................ 25
6 - X8: CONNETTORI AUSILIARI ...................................................................................................... 25
7 - X9 CONNETTORE DI POTENZA: RETE, MOTORE, RESISTENZA DI FRENATURA
(XTRAPULSCD1-A 230V E 400V) ......................................................................................................... 25
CAPITOLO 4 - CONNESSIONI............................................................................................................. 27
1 - DIAGRAMMI DI COLLEGAMENTO .............................................................................................. 27
1.1 - AZIONAMENTO XTRAPULS CD1-a-230/I............................................................................. 27
1.2 - AZIONAMENTO XTRAPULS CD1-a-400/I............................................................................. 28
1.3 - CONNESSIONE DEL COLLEGAMENTO SERIALE .............................................................. 28
1.4 - CONNESSIONE DI UNA BATTERIA DI BACKUP PER L'ALIMENTAZIONE AUSILIARIA .. 29
1.5 - CONNESSIONE PER APPLICAZIONE MULTI-ASSE ........................................................... 29
2 - CRITERI DI CONNESSIONE ........................................................................................................ 30
2.1 - COLLEGAMENTO DI TERRA E CORRENTE DI PERDITA .................................................. 30
2.2 - CONNESSIONE DI SCHERMATURA DEI CONNETTORI.................................................... 31
2.3 - CONNESSIONE DELL' XTRAPULS CD1-a-400 DA 30A A 90A .......................................... 32
2.4 - CAVI DEL MOTORE E DEL RESOLVER .............................................................................. 32
2.5 - CAVI DI COMANDO E DI COLLEGAMENTO SERIALE........................................................ 33
2.6 - CAVI DI COLLEGAMENTO DELLA RESISTENZA DI FRENATURA .................................... 33
3 - REQUISITI DI CONFORMITA' CON GLI STANDARD UL............................................................. 34
3.1 - CONNESSIONE TRAMITE CONNETTORI FASTON ............................................................ 34
3.2 - ALIMENTAZIONE A 24 V ....................................................................................................... 34
3.3 - VALORI NOMINALI DI ALIMENTAZIONE E FUSIBILE UL ................................................... 34
3.4 - AZIONAMENTO XTRAPULS CD1-a-230/I: DIAGRAMMA DI CONNESSIONE CON
PROTEZIONI .................................................................................................................................. 35
TRAMITE FUSIBILI CERTIFICATI “UL” ......................................................................................... 35
3.5 - AZIONAMENTO XTRAPULS CD1-a-400/I DIAGRAMMA DELLE CONNESSIONI CON
PROTEZIONE ................................................................................................................................. 36
TRAMITE FUSIBILE UL .................................................................................................................. 36
3.6 - ESEMPIO DI CONNESSIONE PER UN'APPLICAZIONE MULTIASSE IN ACCORDO CON
LE NORME UL ................................................................................................................................ 37
CAPITOLO 5 - PARAMETRIZZAZIONE .............................................................................................. 38
CAPITOLO 6 - MESSA IN FUNZIONE ................................................................................................. 39
1 - CONFIGURAZIONE DELL'AZIONAMENTO ................................................................................. 39
2 - PRIMA ACCENSIONE DELL'AZIONAMENTO XTRAPULS CD1-A .............................................. 39
2.1 - MOLTO IMPORTANTE .......................................................................................................... 39
2.2 - ALIMENTAZIONE 24 V.......................................................................................................... 39
2.3 - ALIMENTAZIONE 230 o 400 VAC (a seconda del tipo di amplificatore). .............................. 39
3 - MESSA IN FUNZIONE E REGOLAZIONE DELL'AZIONAMENTO ............................................... 40
3.1 - COMUNICAZIONE TRAMITE CAVO SERIALE ..................................................................... 40
3.2 – CONFIGURAZIONE DEL SENSORE DI FEEDBACK........................................................... 40
3.3 - REGOLAZIONE DELL'AZIONAMENTO................................................................................. 40
3.4 - PARAMETRI DI REGOLAZIONE DI UN MOTORE LINEARE ............................................... 41
3.5 - AGGIUSTAMENTO VELOCITA' CON CARICO VERTICALE ............................................... 42
3.6 - SALVATAGGIO PARAMETRI AZIONAMENTO ..................................................................... 42
3.7 - MOTOR PHASING ALL'ACCENSIONE ................................................................................. 42
3.8 - EMULAZIONE DEL MOTORE PASSO-PASSO .................................................................... 43
3.9 - SOFTWARE GEARING APPLICATION ................................................................................. 43
CAPITOLO 7 - RISOLUZIONE DEI PROBLEMI .................................................................................. 45
1 - DIFETTI ......................................................................................................................................... 45
1.1 - DIFETTI DEL SISTEMA.......................................................................................................... 45
1.2 - "BUSY" FAULT.................................................................................................................... 45
1.3 - " GUASTO DELLA "EEPROM" ............................................................................................... 45
1.4 - GUASTO "TEMPERATURA MOTORE" ................................................................................. 46
1.5 - "ERRORE DI BASSA TENSIONE” (non memorizzata) .......................................................... 46
4
Contenuti
XtrapulsCD1-a
1.6 - "POWER STAGE" GUASTO .................................................................................................. 46
1.7 - ERRORE NELLA CONFIGURAZIONE DEL FEEDBACK ..................................................... 46
1.8 - ALLARME "RDC " IN CONFIGURAZIONE DI FEEDBACK RESOLVER .............................. 47
1.9 - ALLARME DI "FEEDBACK" ENCODER ................................................................................ 47
1.10 - ERRORE DI CONTEGGIO ENCODER ............................................................................... 47
1.11 - ALLARME "HES" .................................................................................................................. 50
1.12
- ALLARME "I2T" ................................................................................................................ 50
1.13 - ERRORI DI INSEGUIMENTO .............................................................................................. 50
2 - PROBLEMI OPERATIVI ................................................................................................................ 50
2.1 - IL MOTORE NON SI MUOVE ................................................................................................ 50
2.2 - MOTORE ACCESO MA NON IN COPPIA ............................................................................. 51
2.3 - ALBERO BLOCCATO, OSCILLAZIONI IRREGOLARI O MOTORE ALLA MASSIMA
VELOCITA'...................................................................................................................................... 51
2.4 - DISCONTINUA ROTAZIONE DEL MOTORE IN POSIZIONE A COPPIA A ZERO .............. 51
2.5 - MOVIMENTO DEL MOTORE CON INGRESSO ANALOGICO CON VELOCITA' ZERO ..... 51
2.6 - MOTORE RUMOROSO DA FERMO ..................................................................................... 51
2.7 - MOTORE RUMOROSO DA FERMO E IN ROTAZIONE ....................................................... 51
2.8 - CONTROLLO DI POSIZIONE NON POSSIBILE CON NC.................................................... 51
3 - ASSISTENZA E MANUTENZIONE ............................................................................................... 52
CAPITOLO 8 - APPENDICE................................................................................................................. 53
1 - AGGIUSTAMENTO HARDWARE ................................................................................................. 53
2 - ADATTAMENTO A VARI TIPI DI RESOLVER .............................................................................. 54
3 - ADATTAMENTO A VARI TIPI DI MOTORE .................................................................................. 54
3.1 - SENSORE TERMICO DEL MOTORE ................................................................................... 54
3.2 - PROTEZIONE I2t .................................................................................................................... 55
3.3 - PROTEZIONE DA ERRORE DI CONTEGGIO ENCODER ................................................... 56
3.4 - PROTEZIONE DA ERRORE DI INSEGUIMENTO ................................................................ 57
4 - USO DEGLI INGRESSI “FINECORSA” ........................................................................................ 57
5 - USO DELL'INGRESSO "CV0"....................................................................................................... 58
6 - USO DELLA USCITA “AOK” ......................................................................................................... 58
7 - USO DELL'INGRESSO "RESET".................................................................................................. 58
8 - USO DELL'INGRESSO "ENABLE" ............................................................................................... 58
9 - USO DEL SEGNALE DI USCITA "BRAKE" ................................................................................... 58
10 - USCITE ENCODER INCREMENTALE ....................................................................................... 59
11 - USEO DELL'INGRESSO "LIMITE DI CORRENTE" .................................................................... 59
12 - STRUTTURA DEL SERVOCONTROLLO................................................................................... 60
13 - INDIRIZZAMENTO DELL'AZIONAMENTO VIA RS-232 ............................................................. 61
14 - INDIRIZZAMENTO DELL'AZIONAMENTO VIA RS-422 ............................................................. 62
15 - COMPENSAZIONE DEL COGGING TORQUE .......................................................................... 62
16 - SISTEMA DI FRENATURA ......................................................................................................... 63
17 - CODICI PER ORDINARE GLI AZIONAMENTI ........................................................................... 64
Contenuti
5
XtrapulsCD1-a
Capitolo 1 - Descrizione generale
1 - INTRODUZIONE
Gli azionamenti della serie XtrapulsCD1-a sono azionamenti PWM adatti a regolare la velocità in un motore
sincrono sinusoidale dotato di un sensore di posizione.
Il XtrapulsCD1-a è disponibile come modulo autonomo che include i filtri di rete, disponibile nelle versioni
VAC o 400/480 VAC.
230
2 - DESCRIZIONE / CONFORMITA
2.1 - DESCRIZIONE GENERALE
Il XtrapulsCD1-a è un azionamento che controlla direttamente la coppia e la velocità del motore per mezzo di
informazioni fornite da un sensore di posizione ad alta risoluzione (resolver o encoder). La commutazione
sinusoidale basata su questo sensore di posizione ad alta risoluzione, fornisce una coppia motore molto regolare
ed accurata.
Il XtrapulsCD1-a può essere configurato per vari tipi sensore di posizione. La configurazione appropriata del
sensore di posizione è selezionabile via software ed è salvabile nell'azionamento.
Con il feedback da resolver, è disponibile la posizione angolare assoluta, così che il motore è
immediatamente controllato dopo la messa in funzione del drive.
Con il sensore "SinCos tracks", che fornisce segnali compatibili coi segnali SinCos encoder, il cui periodo è
uguale al passo polare, il servomotore è immediatamente controllato dopo la messa in funzione del drive.
Con un encoder SinCos assoluto su un giro (Heidenhain ERN 1085 o compatibile), il servomotore è
immediatamente controllato dopo la messa in funzione dell'azionamento.
Con il solo encoder incrementale, occorre effettuare la procedura di allineamento delle fasi del motore.
Con un encoder incrementale fornito di captatori ad effetto Hall (HES), la procedura di allineamento del
motore non è più necessaria.
Con un encoder assoluto a singolo giro, multigiri o lineare che utilizza il protocollo di comunicazione
ENDAT® o il protocollo di comunicazione HIPERFACE®, il servomotore è immediatamente controllato
dopo la messa in funzione dell'azionamento.
Il comando di coppia o di velocità è un segnale analogico (± 10 V). Il segnale di posizione del rotore è disponibile
in due canali A e B in quadratura, e un impulso marcatore per ogni giro.
La risoluzione è programmabile. Tutti i valori tra i 64 impulsi / giro e 16384 impulsi / giro (PPR) possono essere
programmati in base alla limitazione di velocità del motore. Gli errori principali sono visualizzati sul pannello
frontale dell'amplificatore.
Tutti i parametri di controllo e di configurazione sono programmabili via RS-232 (o RS-422 optional) e salvati in
una EEPROM. La fasatura automatica e l'autotaratura dei guadagni consentono una facile e rapida messa in
funzione dell'azionamento.
Gli azionamenti XtrapulsCD1-a hanno un convertitore DC/DC per la corretta alimentazione dei vari circuiti.
L'alimentazione ausiliaria consente di mantenere la logica attiva, in modo da mantenere I dati di posizione anche
in caso di mancanza di potenza. Per mantenere la posizione anche in caso di mancanza della tensione ausiliaria
è possibile fornire la stessa tramite batteria a 24 V. Questo cablaggio può essere utilizzato per il funzionamento in
"assoluto" con l'azionamento XtrapulsCD1-a (vedi capitolo 4: Connessioni).
6
Capitolo 1 – Descrizione generale
XtrapulsCD1-a
Condizioni di alimentazione:
XtrapulsCD1-a 230 / I: 230 VAC monofase o trifase con un trasformatore o auto-trasformatore (vedi capitolo
2, punto 1.1)
XtrapulsCD1-a-400/I: da 400 a 480 VAC alimentazione trifase.
Un sistema di soft start della tensione di alimentazione limita la corrente di spunto all'accensione.
Le dimensioni estremamente ridotte del XtrapulsCD1-a consentono un'integrazione ottimale in armadi con
profondità 300 millimetri (connettori compresi).
Il VISUAL DRIVE SET UP software di configurazione che è PC compatibile con il sistema operativo Windows ®,
consente la visualizzazione e la facile modifica di tutti i parametri dell'azionamento. La messa in servizio del drive
è semplice e veloce grazie alla funzione di "oscilloscopio" inclusa in questo software.
2.2 - CONFORMITÀ E CERTIFICAZIONE "CE"
Gli azionamenti XtrapulsCD1-a sono stati approvati per la loro conformità con gli standard EMC contenuti nella
norma EN 61800-3:2004 riguardanti i "Servosistemi elettrici a velocità variabile":
EN 55011, Group 1, C3 relativo ai disturbi radioelettrci irradiati,
EN 61000.4-2-3-4-5 relativo all'immunità.
Le norme da applicare alle apparecchiature elettriche dei macchinari industriali sono le EN 60204.1.
Gli azionamenti sono stati certificati "CE" dall'anno 2000.
2.3 - REFERIMENTO ALLA MARCATURA "UL"
La serie XtrapulsCD1-a è marcata "cULus" conformemente a UL508C e UL840 per quanto riguarda l'isolamento.
Questo prodotto è stato valutato da:
-
la terza edizione di UL508C,lo standard UL per le apparecchiature di conversione della potenza, datato
Maggio 2002 per l'elenco UL (USL),
-
lo standard CSA per le apparecchiature destinate al controllo industriale, C22.2 N°14-95, datato agosto 1995
per l'elenco UL Canadese (CNL).
Il manuale specifica che l'utente finale deve fornire un'alimentazione isolata per l'ingresso ausiliario a 24 VDC
protetto da un fusibile a 4 A marcato UL; la scheda di alimentazione è considerata pertanto un circuito bassa
potenza limitato in base alla sezione 31.4 dello standard UL508C. Perciò, non è necessario che le distanze tra le
piste ed I conduttori sulla scheda di alimentazione siano valutati in base alla sezione 31.2 dello standard UL508C,
ma sianoi valutati in base a Ul 840. In base ai requisiti dello standard Ul 840 (seconda edizione, datata 20 Maggio
1993) descrivono delle distanze di 2,5 mm per un ambiente con grado di inquinamento 2.
Il collegamento a terra è fissato al telaio del dispositivo tramite un rivetto. Avibulb masse, BN10-5168. Il
connettore è conforme alle dimensioni standard indicate nella tabella 6.2 di UL 310, lo standard per I terminali di
connessione elettrica rapida.
3 - ALTRI DOCUMENTI
-
"CD1-a/CD1-k SinCos track feedback": note dell'applicazione relativa all'utilizzo di motori forniti di encoder di
posizione di tipo “SinCos Tracks” ;
-
"CD1-a/CD1-k absolute encoders feedback": note dell'applicazione relativa all'utilizzo di encoder assoluti a
semplice giro, multigiro o lineari che utilizzano il protocollo di comunicazione ENDAT® o il protocollo di
comunicazione HIPERFACE®.
Capitolo 1 – Descrizione generale
7
XtrapulsCD1-a
Capitolo 2 - Specifiche
1 - DATI TECNICI
1.1 - AZIONAMENTO XTRAPULS CD1-a-230/I
Tensione di alimentazione di rete
230 VAC +10 % / -15 %, 1~ o 3~, 50 - 60 Hz
Logica ausiliaria isolata
24 VDC +/- 15 % - 320 mA
Tensione di uscita fase-fase motore
200 Vrms
Sistema di frenatura integrato
Resistenza esterna 100 Ohm / 100 W (dp 100/100)
Resistenza minima: 50 Ohm (dp 50/200)
Induttanza minima tra le fasi
1 mH
CORRENTE NOMINALE DI USCITA
TIPODI
AZIONAMENTO
Max corrente
di uscita per 1
sec. (Arms)
+/- 5 %
(230 VAC)
Corrente
nominale
di uscita
(Arms)
(230 VAC)
Potenza
persa
(W)
Corrente
nominale in
ingresso
(Arms)
(230 VAC,
60 Hz)
Fusibili di
protezione di
linea
RK5 listed
(Bussman /
Littelfuse)
Corrente
di corto
circuito
sulla rete
Conformità
UL
CD1-a-230/2,25
CD1-a-230/4,5
CD1-a-230/75
CD1-a-230/10,5
CD1-a-230/16,5
2.25
4.5
7.5
10.5
16.5
1.1
2.25
3.75.
5.25
8.25
25
30
44
55
66
1.1
2.25
3.75
5.25
8.25
6A
6A
6A
6A
9A
5 kA
5 kA
5 kA
5 kA
5 kA
si
si
si
si
si
Massima temperatura ambiente = 40° C.
LIMITAZIONE DI POTENZA IN FUNZIONAMENTO MONOFASE
!
Potenza RMS continua che può garantire una vita del condensatore
di 20 000 ore
650 W per CD1-a-230/2,25 a 10,5
1000 W per CD1-a-230/16,5
1.2 - AZIONAMENTO XTRAPULS CD1-a-400/I MONOASSE
Tensione di alimentazione di rete
Da 400 a 480 VAC + 10 % /- 15 % 3~, sistema TN o TT con
punto neutro collegato a massa 50 - 60 Hz
(la tensione fase-terra deve essere bilanciata)
Logica ausiliaria isolata
24 VDC +/- 15 % - 320 mA
Tensione di uscita fase-fase motore
Da 380 a 460 Vrms a seconda della rete di alimentazione
Sistema di frenatura integrato
XtrapulsCD1-a-400/da 1.8 a 7.2 A:
Resistenza esterna 200 Ω / 100 W (dp 200/100)
Resistenza minima: 150 / 100 W
XtrapulsCD1-a-400/14:
Resistenza esterna 50 Ω / 200 W (dp 50/200)
XtrapulsCD1-a-400/30 e 45:
Resistenza esterna 33 Ω / 280 W (dp 33/280)
XtrapulsCD1-a-400/70 e 90:
Resistenza esterna 16,5 / 560 W (dp 16,5/560)
Induttanza minima tra le fasi
2 mH
8
Capitolo 2 – Specifiche
XtrapulsCD1-a
GAMMA TAGLIE DI CORRENTE
Gamme di tensioni in uscita per le reti trifase 400-480 VAC (rms)
Gamme di correnti in uscita: 1.8 A, 2.7 A, 5.1 A, 7.2 A, 14 A, 30 A, 45 A, 70 A, 90 A (rms)
TIPO DI
AZIONAMENTO
Corrente in
uscita
massima per
1 sec. (Arms)
+/- 5 % (480
VAC)
Corrente
nominale
in uscita
(Arms)
(480 VAC)
Potenza
persa
(W)
Corrente
nominale in
ingresso
(Arms)
(480 VAC,
60 Hz)
1.8
2.7
5.1
7.2
14
30
45
70
90
0.9
1.35
2.55
3.6
7
15
20
35
35
35
43
71
93
200
400
560
650
650
0.9
1.35
2.55
3.6
7
15
20
35
35
CD1-a-400/1.8
CD1-a-400/2.7
CD1-a-400/5.1
CD1-a-400/7.2
CD1-a-400/14
CD1-a-400/30
CD1-a-400/45
CD1-a-400/70
CD1-a-400/90
Fusibile di
protezione max
circuito di linea
elencato
RK5 o A60Q40
Resistenza
nominale
al corto
circuito
Conformità
UL
per 400/70 e 90
2A
2A
4A
4A
8A
20 A
20 A
40 A
40 A
5 kA
5 kA
5 kA
5 kA
5 kA
5 kA
5 kA
5 kA
5 kA
si
si
si
si
si
si
si
si
si
Massima temperatura ambiente = 40° C.
1.3 - SPECIFICHE COMUNI TRA GLI AZIONAMENTI XTRAPULS CD1-a-230/I E XTRAPULS CD1-a-400/I
Anelli di regolazione: corrente, velocità e
posizione
Digitali
Filtro rete sull'alimentazione
Integrati nell'azionamento
Ad eccezione del XtrapulsCD1-400/90:
- condensatori EMC integrati
- induttanze di filtro di modo comune non integrati
- filtro consigliato: F-400-70-90
Filtro sull'alimentazione
Integrato nell'azionamento
Sensore di posizione
Resolver
Encoder assoluto (ERN1085 o compatibile)
Encoder incrementale (TTL o SinCos)
Encoder incrementale + sensori ad effetto Hall
Protezione stadio alimentazione
Vedere la sezione 3 "Protezioni principali"
Frequenza di commutazione PWM
8 kHz
Limitazione di corrente interna
Imax: da 20 % a 100 % e I nominale da 20 % a 50 %
Durata Imax = 1 secondo
Limitazione di corrente esterna
Da 0 a 10 V (risoluzione = 13 bits)
da 100 a 0 % per la limitazione Imax interna
Limitazione della polarità, selezionabile tramite software:
* da 0 V a 10 V (non c'è limitazione a 0 Volt)
* da 10 V a 0 V (non c'è limitazione a 10 Volt)
Ingresso analogico velocità CV
±10 V, risoluzione = 14 bits
Rampa accel/decel motore
Tra 0 e 30 S, da zero alla massima velocità
Regolazione velocità e posizione
Periodo di campionamento = 0,5 ms
Antisaturazione dell'integratore
Filtro antirisonanza
Regolazione guadagno
Larghezza di banda dell'anello di velocità
Frequenza di taglio per o spostamento di fase di 45°
selezionabile: 50 Hz, 75 Hz o 100 Hz
Capitolo 2 – Specifiche
9
XtrapulsCD1-a
Larghezza di banda dell'anello di corrente
Frequenza di taglio per lo spostamento di fase di 45°: 1000
Hz
Massima velocità del motore
Regolazione da 100 rpm a 25000 rpm
Range di velocità
1 : 8192 con 14 bits di risoluzione in ingresso
Uscita di posizione encoder
Due vie in quadrature A e B + 1 segnale di zero per giro.
Linea RS422.
Risoluzione programmabile da 64 ppr a 16384 ppr (in
funzione della velocità massima del motore)
Precisione in arco minuti = (8 + 5400/Risoluzione)
Nota: la precisione di posizione totale deve tenere conto
della precisione del resolver utilizzato
Ingresso resolver
Risoluzione: 65536 ppr (16 bit)
Frequenza di eccitazione: 8 kHz
Rapporto di trasformazione: 0,3 to 0,5 (mesa a punto in
fabbrica per gli altri valori)
Ingresso encoder
Selezionabile tramite software:
Due vie in quadrature A e B + 1 segnale di zero per giro.
linea RS 422
Frequenza impulsi massima: 1 MHz
Risoluzione: da 500 a 106 ppr
Encoder incrementale Sin/Cos
Heidenhain 1Vcc Sin/Cos o compatibile
Massima frequenza segnali: 200 kHz
Risoluzione: da 500 a 106 ppr
Fattore di interpolazione: 1024
Encoder SinCos assoluto su un giro
Heidenhain ERN 1085 o compatibile
Massima frequenza segnali: 200 kHz
Risoluzione: 2048 o 512 ppr
Fattore di interpolazione: 1024
INGRESSO IMPULSI E DIREZIONE
Riconfigurazione dell'entrata encoder per emulazione motore
passo per passo: linea RS-422
Frequenza massima di impulsi: 1 MHz
Risoluzione: da 200 a 106 pitch/revolution
Ingresso sensori ad effetto Hall
Selezionabile tramite software: tipo HES 120° o 60°
Tensione di alimentazione 5 V o 12 V
Individuazione dell'errore sequenza HES
Ingressi logici
Abilitazione: ENABLE
Fine corsa +: FC+
Fine corsa -: FCComando di corrente: CI
Ingresso comando di velocità zero: CV0
RESET errori
Uscite logiche
"AOK" contatto relè
Umax = 50 V, Imax = 100 mA, Pmax = 10 W
"AOK": chiuso se l'azionamento è OK, aperto se è in errore
Controllo freno motore, massimo a 1.5 A con 24 VDC.
Open collector protetto contro i cortocircuiti.
Il freno viene controllato quando il motore è abilitato e nessun
errore è segnalato.
10
Capitolo 2 – Specifiche
XtrapulsCD1-a
Uscita analogica
+/- 10 V, risoluzione: 8 bit, carico: 10 mA, linearità: 2 %, filtro
passa basso: 170 Hz, uscite segnali programmabili: Canale 1
dell'oscilloscopio digitale (corrente, velocità o posizione) o
uscita "Phasing OK" (per gli encoder incrementali senza HES)
Visualizzazione errori
LED sul pannello frontale, diagnostica tramite cavo seriale
Settaggio parametri
Standard tramite RS-232 (RS-422 optional)
Funzioni automatiche
Funzione AUTO-PHASING
Funzione AUTO-TUNING (calcolo guadagni anelli di
regolazione)
Compensazione offset su ingresso analogico
Conformità con gli standard: Ceritificazione CE
Connessione di schermatura a 360°
equipotenzialità secondo le normative di
cablaggio
XtrapulsCD1-a-400/70 e 90 A con F-400-70/90
filtro di rete
Standard EMC
- immunità: EN 61000.4-2-3-4-5
- disturbi condotti e irradiabili: EN 55011,Gruppo 1, categoria
C3
Standard elettrici per I macchinari industriali:
- EN 60204.1: - Isolatore: 1500 VAC/1 min.
- Corrente di dispersione > 30 mA (filtri EMI)
Conformità con gli standard: Elenco UL
schermatura a 360°, equipotenziale secondo le
norme di cablaggio
La serie XtrapulsCD1-a è elencate “cULus” secondo gli
standard UL508C e UL840.
Questo prodotto è stato valutato in base alla:
terza edizione di UL508C, lo standard UL per le
apparecchiature di conversione della potenza datata
Maggio 2002 per l'elenco UL (USL),
standard CSA per le apparecchiature di controllo
industriale, C22.2 N° 14-95, datato Agosto 1995 per
l'elenco Canadese UL (CNL)
Temperatura
- conservazione da - 20°C a + 70°C
- funzionamento da 5°C a +40°C
Da 40°C la corrente nominale deve essere diminuita del 3 %
per ogni grado centigrado aggiunto
Temperatura massima: 50°C
Altitudine
1000 m
Umidità
< 50 % a 40°C e < 90 % a 20°C: (EN 60204.1 standard)
Condensa non ammessa (stoccaggio e funzionamento)
Raffreddamento
Ventilazione forzata (ventola integrata nel XtrapulsCD1-a)
Controllare che la ventilazione non sia ostacolata e che gli
ingressi dell'aria non siano ostruiti nè in alto, nè in basso.
Ambiente
Lo chassis aperto deve essere montato in una custodia che
protegga l'azionamento da polvere e condensa (ambiente con
grado di inquinamento 2)
Posizione di montaggio
Verticale
Luogo di montaggio
Armadio chiuso privo di elementi conduttivi o agenti corrosivi
e conforme ai requisiti delle condizioni ambientali
Nessuna condensa
Peso
XtrapulsCD1-a-230/I: circa 1 kg
XtrapulsCD1-a-400/ da 1.8 a 7.2 A: circa 1.5 kg
XtrapulsCD1-a-400/14 : circa. 3 kg
XtrapulsCD1-a-400/30 e 45: circa 4.8 kg
XtrapulsCD1-a-400/70 e 90: circa 5.3 kg
Capitolo 2 – Specifiche
11
XtrapulsCD1-a
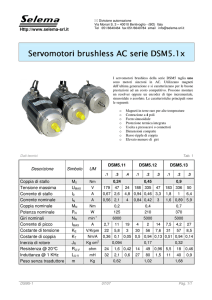
2 - DIAGRAMMA A BLOCCHI
Encoder
supply
Encoder
sensor
conversion
X3
Enable
Fault
Resolver
sensor
conversion
X1
Pulse
counter
Sinusoidal
oscillator
Position
Vector
control
Current
input
command
Speed
PWM
Power
stage
Current
loops
Up
Rectifying
+
filtering
L1
L2
L3
U motor X
Current
monitors
V motor
A
W motor
Encoder
outputs
B
Z
Current
limitation
Speed
loop
I2t
function
RB
Up
Fault
X2
CV
Ramp
Energy
recuperation
RB
Input command
FC/CVO
Protections
processing
AOK
Display
Ilim
AOK
Reset
Enable
Reset
+5V
+12V
-12V
X5
Serial
link
+24V
DC/DC
converter
0V X
Parameters
saving
3 - ALLARMI
3.1 - INDICAZIONE ALLARMI
ERRORE
VISUALIZZATO
ALLARMI
Sovraccarico corrente nominale (vedi capitolo 8, punto 3.2)
Interruzione dei cavi di posizione (resolver o encoder)
Cavo interotto sensori ad effetto Hall / Errore di commutazione
segnali encoder assoluto
Stadio di potenza guasto
Tensione di alimentazione insufficiente
Sovratemperatura del motore
HES
Counting / RDC
Undervolt.
°C motor
Errore di posizione o velocità
Following err.
Errore salvataggio dati in memoria
EEPROM
- Errore procedura di esecuzione
- Errore fase di inizializzazione
24 VDC tensione ausiliaria fuori tolleranza
19 V < 24 VDC < 29 V
12
Feedback
Power stage
Errore conteggio impulsi dell'encoder / errore di conversione
posizione Resolver
: LED spento
I2t
Busy
24 V
LED
: LED acceso
Capitolo 2 – Specifiche
XtrapulsCD1-a
NOTA
L'allarme di power stage include I seguenti errori:
- alimentazione sovratensione
- interruttore di protezione interno
- corto circuito tra le fasi del motore o tra fase e terra
- sovratemperatura (solo su XtrapulsCD1-a-400/I)
- errato funzionamento ventola
- errore PWM
- anomalia alimentazione
- anomalia nel sistema di frenatura
L'errore di “Power stage” può essere visualizzato sul software Visual drive Setup
Tutti questi allarmi vengono memorizzati nell'azionamento ad eccezione del allarme di tensione insufficente.
Il ripristino del guasto può essere fatto:
- mediante la funzione di RESET del software Visual Drive Setup
- attraverso l'ingresso RESET (pin 13 del connettore X2)
- disattivando l'alimentazione dell'amplificatore.
Tutti gli allarmi rendono l'azionamento non funzionante. Tutti gli allarmi, ad eccezione di quello di bassa tensione,
attivano l'apertura del contatto del relè AOK. L'allarme di bassa tensione deve essere configurato dal software
per attivare l'apertura del contatto del relè AOK.
Capitolo 2 – Specifiche
13
XtrapulsCD1-a
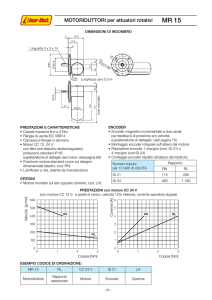
4 - DIMENSIONI
4.1 - AZIONAMENTO XTRAPULS CD1-a230/I
4.2 - AZIONAMENTI XTRAPULS CD1-a-400/DA 1,8 A
7,2 A
260
293
234
228
200
203
199
230
4.3 - AZIONAMENTO XTRAPULS CD1-a400/14
4.4 - AZIONAMENTI XTRAPULS CD1-a-400/30/45/70
E 90 A
293
234
V
W
258
288
U
230
230
14
Capitolo 2 – Specifiche
XtrapulsCD1-a
4.5 - RESISTENZA DI FRENATURA dp 100/100, dp 200/100, dp 50/200, dp 33/280 E dp 16,5/560
A
D
C
40
7
7
B
dp 16.5/560
7
7
150
1 2 3
40
7
Connessione della resistenza di frenatura dp 16.5 /560 W sui pins 1 e 3
277.5
290
DIMENSIONI
A
B
C
D
Capitolo 2 – Specifiche
dp 50/200, dp 100/100 e
dp 200/100
157 mm
145 mm
83 mm
52 mm
53.31
dp 33/280
dp 16,5/560
290 mm
278 mm
83 mm
57 mm
290 mm
278 mm
57 mm
145 mm
15
XtrapulsCD1-a
5 - FISSAGGIO
MONTAGGIO VERTICALE OBBLIGATORIO
5.1 - AZIONAMENTO XTRAPULS CD1-a230/I
5.2 - AZIONAMENTI XTRAPULS CD1-a-400/DA1,8 A
A 7,2A
2 M4 screws +
2 Ø 4 waschers
220
=
=
5.3 - AZIONAMENTO XTRAPULS CD1-a400/14
=
82,80
16
5.4 - AZIONAMENTI XTRAPULS CD1-a-400/30/45/70
E 90 A
4,15
4 M4 screws +
4 Ø 4 waschers
278, 5
258
250
3,15
2 M4 screws +
2 Ø 4 waschers
=
=
64,8
64,8
288
=
228
200
192
3
3
2 M4 screws +
2 Ø 4 waschers
25,00
60,00
110,00
Capitolo 2 – Specifiche
XtrapulsCD1-a
6 - INSTALLAZIONE MULTIASSE NELL'ARMADIO
6.1 - AZIONAMENTO XTRAPULS CD1-a230/I
X9
Ground
X8
6.2 - AZIONAMENTI XTRAPULS CD1-a-400/DA 1,8 A
7,2 A
X9
64,8
X5
RS 232
80
80
X5
RS 232
X5
X5
RS 232
RS 232
6.3 - AZIONAMENTO XTRAPULS CD1-a400/14
X8
Ground
X9
X8
Ground
X9
RB
X9
RB
L1
DC-
L2
L3
DC+
V
U
W
X8
0V
24V
Br+
Br-
0V
24V
Br+
Br-
110
X8
X5
RS 232
RB
X9
RB
RB
L2
X9
L3
L1
DC+
DC-
L2
DC-
L3
L1
DC+
V
W
RB
V
U
RS 232
X9
L1
RB
L2
DC-
L3
V
DC+
U
W
X8
0V
24V
Br+
Br-
W
X5
98
82,8
6.4 - AZIONAMENTI XTRAPULS CD1-a-400/30/45/70
E 90 A
125
64,8
X8 Ground
X5
RS 232
X8
0V
24V
Br+
Br-
RB
U
X5
RS 232
234,5
*CD1-a-400/70 and 90 A
Br-
Br+
24V
0V
X8
Capitolo 2 – Specifiche
17
Xtrapuls CD1-a
Capitolo 3 - Ingressi-Uscite
1 - POSIZIONE DEI CONNETTORI
1.1 - CONNETTORI SULL'AZIONAMENTO
Command
Input/output
CD1-a
X2
I: 10.5
U: 400
N°Serie: 200000
Date: IY
X2
Command
Input/output
X9
Ground
X8
1
A B C D E F GH I J
K L MN O P Q R S T
Resolver
X1
X1
1
Resolver
WARNING !
Residual voltage
Wait 1 minute after
power OFF
X5
RS 232
Encoder
X3
X8
X9
1
X3
Error display
Encoder
24 Vdc connector
Power connector
2
I t
Feedback
HES
Power stage
Counting/RDC
Undervolt.
°C motor
Following err.
EEPROM
Busy
"24 V"
SYS ON
Offset
2 - X1: CONNETTORE RESOLVER (Sub D 9 pins femmina)
Stesso connettore sia per gamma 230 V che per la gamma 400 V.
PIN
1
6
DESCRIZIONE
TC (sensore di temperatura)
Schermo
2
7
3
8
4
9
5
TC (sensore di temperatura
S1 (coseno-)
S3 (coseno+)
S4 (seno-)
S2 (seno+)
R2 (riferimento-)
R1 (riferimento+)
COMMENTO
Se l'interruttote termico è collegato alla X1
Lo schermo deve essere connesso a 360°
all'involucro metallico. La connessione va
completata con un collegamento al pin 1.
Se l'interruttote termico è collegato alla X1
Connetore resolver
Connetore resolver
Connetore resolver
Connetore resolver
Connetore resolver
Connetore resolver
Per la connessione ad altri tipi di resolver vedere capitolo 8 (Appendice), sezione 2.
18
Capitolo 3 – Ingressi-Uscite
Xtrapuls CD1-a
3 - X2: INGRESSI/USCITE LOGICHE E SEGNALI ENCODER SIMULATO (Sub D 25 pins maschio)
Stesso connectore sia per la gamma a 230 V che per la gamma a 400 V.
Pin
1
14
24
20
23
2
10
25
13
Segnale
FC+: Fine corsa +
FC-: fine corsa Rif. ingresso
ABILITAZIONE
Rif. ingresso
Comando di corrente CI
CV0 velocità zero /
Fasatura ingresso motore
GND
RESET
12
Rif. ingresso (0 Volt)
I
GND riferimento a terra
Ingresso logica positiva – Isolamento galvanico
Reset allarmi dell'azionamento
Riferimento ingressi logici isolati galvanicamente
17
16
15
CV+ ingresso comando CV+
CV- ingresso comando CV GND
I
I
I
± 10 V comando velocità per la gestione della velocità massima
or ± 10 V comando corrente per Imax con ingresso "CI" attivo
GND collegamento a terra dell'azionamento
3
Limitazione di corrente
I
Ingresso analogico per comando di corrente esterno
Da 0 a 10 V per il 100 % da 0 % di Imax
11
Uscita analogica
U
+/-10 V, risoluzione: 8 bit, 10 mA, linearità: 2 %, filtro passa
basso: 170 Hz, uscita canale programmabile: Canale 1
dell'oscilloscopio digitale (corrente, velocità o posizione) o uscita
fase OK (da 0 V a 10 V quando la fasatura motore è OK con
encoder incrementale senza HES)
AOK: azionamento pronto
U
Contatto relè chiuso se l'azionamento è OK, aperto se è in
allarme. Protezione sovratensione bidirezionale TRANSIL
Pmax = 10 W con Umax = 50 V o Imax = 100 mA
21
+ 12 Volts
U
22
- 12 Volts
U
Impedenza: 9 Ohms. Max. 150 mA disponibile
Impedenza: 47 Ohms. Max. 50 mA disponibile
4
5
6
7
8
9
Z/
Z
A/
A
B/
B
U
U
U
U
U
U
Uscita differenziale impulsi encoder Z/ (max. 5 V, 20 mA)
Uscita differenziale impulsi encoder Z (max. 5 V, 20 mA)
Uscita differenziale encoder canale A/ (max. 5 V, 20 mA)
Uscita differenziale encoder canale A (max. 5 V, 20 mA)
Uscita differenziale encoder canale B/ (max. 5 V, 20 mA)
Uscita differenziale encoder canale B (max. 5 V, 20 mA)
18, 19
I/U
I
I
I
I
I
I
I
Descrizione
Logica positiva – Isolamento galvanico
Logica positiva – Isolamento galvanico
Riferimento ingressi logici isolati galvanicamente
Ingresso logica positiva – Isolamento galvanico
Riferimento ingressi logici isolati galvanicamente
Ingresso logica positiva – Isolamento galvanico
Ingresso logica positiva – Isolamento galvanico
I
I
(1)
(1): La somma delle correnti utilizzata nei connettori X2 pin 21 et X3 pin 10 non deve superare i 150 mA.
Capitolo 3 – Ingressi-Uscite
19
Xtrapuls CD1-a
3.1 - SPECIFICHE INGRESSI ANALOGICI: CV+, CV-, limitazione corrente
16K
X2-17 (CV+)
20K
100K
100K
100K
100K
X2-16 (CV-)
1nF
X2-15 (GND)
16K
1nF
2.2nF
X2-3 (ILIM)
100K
10K
X2-25 (GND)
18K
10K
3.2 - SPECIFICHE INGRESSI LOGICI ENABLE, FCP, FCN, RESET, CVO, CI
5V
8.2 K
Logic input
10 KΩ
100 nF
100 KΩ
0V
La tensione di ingresso corrispondente al livello 1 è tra i 18 V e 30V.
3.3 - SPECIFICHE SEGNALE USCITA RELE' "AOK"
X2/18
AOK
+12 V
Bidirectional
53 V
TRANSIL
X2/19
AOK/
Il contatto del relè si apre per eventuali guasti sull'azionamento, tranne per il segnale di "tensione insufficente".
Pmax = 10 W con Umax = 50 V e Imax = 100 mA.
3.4 - SPECIFICHE USCITE ENCODER
+5V
X2 - 5-7-9
CI
26LS31
X2 - 4-6-8
Ricevitore consigliato: 26LS32
20
Capitolo 3 – Ingressi-Uscite
Xtrapuls CD1-a
3.5 - SPECIFICHE USCITE ANALOGICHE
4.7nF
200K
X2/11
33K
X2/25
4 - X3: INGRESSO ENCODER
Stesso connettore sia per la gamma a 230 V che per la gamma a 400 V.
4.1 - X3 INGRESSO ENCODER INCREMENTALE TTL & HES (Sub D 25 pins femmina)
La configurazione “Encoder incrementale Ttl & HES” è selezionabile tramite software e salvata nella EEPROM
dell'azionamento.
Funzioni dei pin del connettore X3.
PIN
18
5
19
6
20
7
8
21
11
24
12
10
FUNCTION
Canale Z/
Canale Z
Canale A/
Canale A
Canale B/
Canale B
+5 V
GND
HALL U
HALL V
HALL W
+12 V
23
9
22
Altri
AGND
TC+
TCriserva
REMARKS
Ingresso differenziale zero encoder Z/
Ingresso differenziale zero encoder Z
Ingresso differenziale encoder canale A/
Ingresso differenziale encoder canale A
Ingresso differenziale encoder canale B/
Ingresso differenziale encoder canale B
Tensione di alimentazione encoder (corrente massima :300 mA)
GND
Segnale d'ingresso sensore Hall fase U
Segnale d'ingresso sensore Hall fase V
Segnale d'ingresso sensore Hall fase W
Tensione d'alimentazione sensore Hall: impedenza d'uscita = 9 Ω, max 150 mA
(1)
disponibile
GND sensore di Hall
Ingresso sonda di temperatura motore
Ingresso sonda di temperatura motore
(1): La somma delle correnti utilizzata nei connettori X2 pin 21 et X3 pin 10 non deve superare i 150 mA.
SPECIFICHE INGRESSO ENCODER
+5V
+5V
+5V
3.3K
X3- 6,7
200R
200R
Receiver
75-176
X3- 5
X3- 18
X3- 19,20
Receiver
75-176
470R*
(*) La resistenza da 470 è cablata come indicato:
XtrapulsCD1-a
230
N
Capitolo 3 – Ingressi-Uscite
400/1.8 to 7.2 A
Q
400/14 A
I
400/30 to 45 A
X
400/70 to 90 A
XD
21
Xtrapuls CD1-a
Non c'è resistenza di carico sulle versioni precedenti.
SPECIFICHE DELLE LINEE D'INGRESSO SENSORI HALL
+3.3V
X3-11,12,24
10K
1K
74HC14
1nF
X3-23
4.2 - X3 CONNETTORE PER INGRESSO INCREMENTALE SIN/COS & HES (Sub D 25 pins femmina)
La configurazione dell'encoder incrementale “SinCos & HES” è selezionabile tramite software e salvata nella
EEPROM dell'azionamento.
Le funzioni dei pin relativi al connettore X3 sono descritte qui sotto.
PIN
25
13
14
1
15
2
8
21
11
24
12
10
FUNZIONE
Segnale R/
Segnale R
Canale A/
Canale A
Canale B/
CanaleB
+5V
GND
HALL U
HALL V
HALL W
+12V
23
9
22
altri
AGND
TC+
TCriserva
NOTE
Ingresso differenziale negativo di riferimento R/ dell'encoder Sin/Cos
Ingresso differenziale dell'impulso di riferimento R dell'encoder Sin/Cos
Ingresso differenziale negativo A/ dell'encoder Sin/Cos
Ingresso differenziale A dell'encoder Sin/Cos
Ingresso differenziale negativo B/ dell'encoder Sin/Cos
Ingresso differenziale B dell'encoder Sin/Cos
Tensione di alimentazione encoder (corrente max3 00 mA)
GND
Segnale d'ingresso sensore Hall fase U
Segnale d'ingresso sensore Hall fase V
Segnale d'ingresso sensore Hall fase W
Tensione di alimentazione sensore di Hall: impedenza d'uscita = 9 Ω, max 150 mA
(1)
disponibile
GND sensore di Hall
Ingresso sonda di temperatura motore
Ingresso sonda di temperatura motore
(1): La somma delle correnti utilizzata nei connetori X2 pin 21 et X3 pin 10 non deve superare i 150 mA.
SPECIFICHE SEGNALI ENCODER SIN/COS
20K
X3-1,2,13
20K
120R
20K
X3-14,15,25
20K
Uref
22
Capitolo 3 – Ingressi-Uscite
Xtrapuls CD1-a
SPECIFICHE DELLE LINEE DI INGRESSSO DEI SENSORI HALL
+3.3V
X3-11,12,24
10K
1K
1nF
74HC14
X3-23
4.3 - X3 CONNETTORE PER ENCODER SIN/COS ASSOLUTO SU UN GIRO (Sub D 25 pins femmina)
La configurazione dell'encoder incrementale “Sin/Cos assoluto su un giro” (Heidenhain ERN 1085 o compatibile)
è selezionabile tramite software e salvato nella EEPROM dell'azionamento.
PIN
25
13
14
1
15
2
16
3
17
4
8
21
9
22
altri
FUNCTION
Segnale R/
Segnale R
Canale A/
Canale A
Canale B/
Canale B
Canalel C/
Canale C
Canale D/
Canale D
+5V
GND
TC+
TCriserva
REMARKS
Ingresso differenziale dell'impulso di riferimento R/ dell'encoder Sin/Cos
Ingresso differenziale dell'impulso di riferimento R dell'encoder Sin/Cos
Ingresso differenziale A/ dell'encoder Sin/Cos
Ingresso differenziale A dell'encoder Sin/Cos
Ingresso differenziale B/ dell'encoder Sin/Cos
Ingresso differenziale B dell'encoder Sin/Cos
Ingresso differenziale C/ dell'encoder Sin/Cos
Ingresso differenziale C dell'encoder Sin/Cos
Ingresso differenziale D/ dell'encoder Sin/Cos
Ingresso differenziale D dell'encoder Sin/Cos
Tensione di alimentazione dell'encoder (corrente max. 300 mA)
GND
Ingresso sonda di temperatura motore
Ingresso sonda di temperatura motore
Capitolo 3 – Ingressi-Uscite
23
Xtrapuls CD1-a
SPECIFICHE DEI SEGNALI ENCODER SIN/COS
20K
X3-1,2,13
20K
120R
20K
X3-14,15,25
20K
Uref
SPECIFICHE DEI SEGNALI DI COMMUTAZIONE SIN/COS
75K
X3-3,4
20K
1K
20K
X3-16,17
75K
Uref
4.4 - X3 CONNETTORE PER L'EMULAZIONE DI MOTORE PASSO-PASSO (Sub D 25 pins femmina)
La configurazione "Emulazione di motore passo-passo" è selezionabile tramite software e salvata nella EEPROM
dell'azionamento.
Le funzioni dei pin relativi per il connettore X3 sono decritte qui sotto.
PIN
19
6
20
7
Altri
FUNZIONE
IMPULSO/
IMPULSO
DIR A/
DIR
riserva
NOTE
Ingresso differenziale impulso /
Ingresso differenziale impulso
Ingresso differenziale DIR/
Ingresso differenziale DIR
SPECIFICHE SEGNALI IMPULSO E DIREZIONE
+5V
CD1a
3.3K
200R
200R
+5V
X3-6,7
X3-19,20
24
75-176
receiver
Capitolo 3 – Ingressi-Uscite
Xtrapuls CD1-a
5 - X5: CAVO SERIALE (Sub D 9 pins maschio)
Stesso connettore per la gamma a 230 V e la gamma a 400 V
PIN
FUNZIONE
5
0 Volt
3
2
6
7
8
9
TXD
RXD
TXH
TXL
RXL
RXH
DESCRIZIONE
GND (connessione di schermatura se non è presente la connessione a "360°"
sul connettore)
Trasmissione dati RS-232
Ricezione dati RS-232
Trasmissione dati RS-422
Trasmissione dati RS-422
Receizione dati RS-422
Receizione dati RS-422
6 - X8: CONNETTORI AUSILIARI
Identici per la gamma 230 V e 400 V.
Connettore maschio a 4 pin con passo 5.08 mm (connettore femmina fornito).
Coppia di serraggio delle viti del connettore: 0.5 Nm.
PIN
SIGNALE
I/U
1
GND
I
2
+24 VDC
I
3
4
Freno+
24 V
Freno-
U
O
FUNZIONE
Riferimento di potenziale
dell'alimentazione a 24 VDC
DESCRIZIONE
Riferimento di potenziale con messa a terra
Alimentazione ausiliaria a 24 VDC
isolata dalla rete.
Alimentazione del freno motore a
24 VDC
Controllo del freno motore
Imax = 1.5 A
24 VDC +/-15 % - 0.320 A
senza freno. Regolazione
del carico 3 %
UL: protezione tramite
fusibile 4 A UL.
Freno senza alimentazione: 24 VDC / 1,5 A
Uscita carico lato massa protetta dai cortocircuiti
7 - X9 CONNETTORE DI POTENZA: RETE, MOTORE, RESISTENZA DI FRENATURA
(XtrapulsCD1-a 230V E 400V)
XtrapulsCD1-a-230/I: connettore maschio a 10 pin con passo 5.08mm (connettore femmina fornito).
XtrapulsCD1-a-400/I: connettore maschio a 10 pin con passo 7.62mm (connettore femmina fornito).
XtrapulsCD1-a-400/70 e 90 A: connettore 10 poli maschio in 2 parti: 7 poli femmina pin da 1 a 7 e 3 poli femmina
pin da 8 a 10 per il motore.
Coppia di serraggio delle viti del connettore: 0.5 Nm
PIN
1
2
SEGNALE
RB
RB
I/U
U
U
FUNZIONE
Dissipazione di energia
durante la frenatura con
velocità e inerzia elevate
3
4
5
6
7
8
9
10
DCL1
L2
L3
DC+
W
V
U
I/U
I
I
I
I/U
U
U
U
Connessione DC bus
Ingresso di rete
DESCRIZIONE
CD1-a-230/I: 100 Ohms / 100 W (dp 100/100)
CD1-a-400/da 1,8 a 7,2: 200 Ohms / 100 W (dp 200/100)
CD1-a-400/14: 50 Ohms / 200 W (dp 50/200)
CD1-a-400/30 and 45: 33 Ohms / 280 W (dp 33/280)
CD1-a-400/70 and 90: 16.5 Ohms / 560 W (dp 16,5/560)
(Le resistenze di frenatura devono essere ordinate
separatamente).
CD1-a-230/I 230 VAC
CD1-a-400/I da 400 a 480 VAC
Connessione DC bus
Fase motore W
Fase motore V
Fase motore U
Capitolo 3 – Ingressi-Uscite
Cavo del motore con connessione a terra mediante
connettore Faston e connessione di schermatura a “360°”
su collare con messa a terra
25
Xtrapuls CD1-a
IMPORTANTE:
I cavi del motore e del freno devono essere schermati e connessi a “360°” sui collari montati a questo scopo nella
custodia.
Il filo di terra del cavo del motore deve essere collegato ai connettore Faston contrassegnato dal marchio “GND”.
Anche il cavo di terra deve essere collegato alla rete di alimentazione sul secondo terminale FASTON.
L'installatore degli azionamenti deve utilizzare una connessione rapida certificata UL per il collegamento di
terra (larghezza nominale 6.35 mm).
Coppia di serraggio: valore conforme alle specifiche.
Per le terminazioni dei cablaggi, usare esclusivamente conduttori in rame.
26
Capitolo 3 – Ingressi-Uscite
Xtrapuls CD1-a
Capitolo 4 - Connessioni
1 - DIAGRAMMI DI COLLEGAMENTO
1.1 - AZIONAMENTO XTRAPULS CD1-a-230/I
(Per le connessioni in accordo con le norme UL, vedi capitolo 4, sezione 3.4).
Power relay
remote control
24V
CD1-a-230/I
24V
Power
relay
18
19
20
1
14
24
23
2
10
13
X1
1
2
Motor temp.
Motor temp.
AOK(1)
AOK/
ENABLE
FC+
FCREF INPUTS
REF INPUTS
CI
CV0
RESET
3
Resolver
signal
7
S3
S1
4
8
S2
S4
Resolver
reference
5
9
R1
R2
6
GND
X8
Position
counting
+24 Vdc
17
CV+
16
CV-
15
GND
4
5
6
7
8
9
-
1
GND
NC
Analog
speed
input
command
RESOLVER
TC
TC
3A
2
+
3
4
+
-
GND
X9
DC+
OR
3
25
ILIMIT
GND
GND
M
O
T
O
R
*
3
2
1
6
5
4
Mains
3x400V
Power
relay
100Ω/100W
X9
230 Vac R
230 Vac
single-phase 230 Vac S
Motor brake
24 Vdc / 1,5 A
7
6
230 Vac 230 Vac L3
three-phase 230 Vac L2 5
230 Vac L1 4
DCBraking resistor
Braking resistor
230 Vac
AC
GND
Phase 1
Phase 2
Phase 3
Motor U phase 10
Motor V phase 9
Motor W phase 8
/Z
Z
/A
A
/B
B
24 Vdc
+/-15%
isolated
400V
Power
OFF
X2
230V
Power
ON
ENABLE
relay
(1)
AOK
*
Braking
resistor
Mains
230 Vac
Power
relay
*
Circuit breaker curve D
I1s = 10 x In
In = 10 A
(1) CAUTION ! Imax = 100 mA (see AOK output specifications)
Nota: Le protezioni del 24 V e dell'alimetazione di potenza, sul lato sorgente, devono essere eseguite
dall'utente.
Capitolo 4 – Connessioni
27
Xtrapuls CD1-a
1.2 - AZIONAMENTO XTRAPULS CD1-a-400/I
(Per la connessione conforme a UL, consultare il capitolo 4, sezione 3.5).
Power relay
remote control
CD1-a-400/I
24V
X2
Power
ON
ENABLE
relay
AOK(1)
Power
OFF
24V
Power
relay
NC
Analog
speed input
command
18
19
20
1
14
24
23
2
10
13
Position
counting
AOK(1)
AOK/
CV+
16
CV-
15
GND
/Z
Z
/A
A
/B
B
3 ILIMIT
25 GND
X1
1
2
RESOLVER
TC
TC
3
ENABLE
FC+
FCREF INPUTS
REF INPUTS
CI
CV0
RESET
17
4
5
6
7
8
9
Motor temp.
Motor temp.
Resolver
signal
7
S3
S1
4
8
S2
S4
Resolver
reference
5
9
R1
R2
GND
6
X8
-
GND
1
+24 Vdc
2
+
3
4
+
-
3A
24 Vdc
+/-15%
isolated
GND
X9
400 Vac L3
400 Vac L2
400 Vac L1
6
5
4
DCBraking resistor
Braking resistor
3
2
1
Motor brake
24 Vdc / 1,5 A
GND
Phase 1
Phase 2
Phase 3
Motor U phase 10
Motor V phase
9
Motor W phase 8
DC+ 7
400 Vac
three-phase
230 Vac
AC
M
O
T
O
R
**
Mains
3x400V/480V
Power
relay
Braking
resistor
dp*
GND
* CD1-a-400/1.8 to 7.2:
!
dp 200/100
CD1-a-400/14:
dp 50/200
CD1-a-400/30 and 45: dp 33/280
CD1-a-400/70 and 90: dp 16.5/560
(1) CAUTION ! Imax = 100 mA (see AOK output specifications)
** 10 A for I < or = 14 A
20 A for I = 30 and 45 A
40 A for I = 70 and 90 A
Circuit breaker curve D
I1s = 10 x In
Note: La protezione del 24 V e dell'alimentazione di potenza sul lato sorgente, devono essere eseguite
dall'utente.
1.3 - CONNESSIONE DEL COLLEGAMENTO SERIALE
connessione di schermatura a 360°
PC
Serial port
RxD 2
3 TxD
TxD 3
2 RxD
GND 5
5 GND
Sub D 9 pins femmina
28
CD1-a
X5
Sub D 9 pins femmina
Capitolo 4 – Connessioni
Xtrapuls CD1-a
1.4 - CONNESSIONE DI UNA BATTERIA DI BACKUP PER L'ALIMENTAZIONE AUSILIARIA
D
X8
AC
230 VAC
2
D
Isolated
24 VDC supply
Battery
30A/h
24 Vdc
R
-+
1
GND
Il consumo dell'azionamento XtrapulsCD1-a è di 320 mA a 24 VDC. Pertanto, una batteria a 24 V / 30 A/h può
mantenere la tensione dell'azionamento, per almeno tre giorni. Questo metodo di backup è molto interessante per
salvare l'inizializzazione della macchina e la posizione dell'asse anche se si opera senza l'alimentazione di rete.
X8
24 V
0V
0V
0V
X9
L1
*** Mains
X9
L1
CD1-a
10 A
X8
24 V
CD1-a
24 VDC
X8
24 V
X9
L1
L2
L2
L2
L3
L3
L3
DC-
DC-
DC-
DC+
DC+
DC+
RB
RB
RB
RB
RB
RB
dp
CD1-a
1.5 - CONNESSIONE PER APPLICAZIONE MULTI-ASSE
dp
*** CD1-a-230/I : 3 x 230 V
CD1-a-400/I : 3 x 400 V
Circuit breaker curve D
I1s = 10 x In
The maximum rating of the circuit breaker is the sum of the rated currents of all drives.
However, in typical servo applications, a service ratio (Ks ≥ 0.3) can be defined for each drive.
The rating of the circuit breaker becomes: I = ∑ N Ks x Irated.axis.n
1
But, the ratings below must not be exceeded:
- 20 A on 230 V drives,
- 20 A on 400 V / 1,8 to 14 A drives,
- 40 A on 400 V / 30 A and 45 A drives,
- 60 A on 400 V / 70 A and 90 A drives.
Capitolo 4 – Connessioni
29
Xtrapuls CD1-a
2 - CRITERI DI CONNESSIONE
(secondo le norme EN61000.4-2-3-4-5 e EN55011 - vedere il diagramma “Connessione di schermatura sui
connettori” capitolo 4, sezione 2.2).
2.1 - COLLEGAMENTO DI TERRA E CORRENTE DI PERDITA
ATTENZIONE !
Tutti gli elementi conduttori di potenziale devono essere schermati e alcuni di essi anche twistati.
La schermatura non è efficace se non è collegata:
-
a un potenziale di riferimento,
tramite una connessione più corta possibile (pochi centimentri; obbligatoriamente meno di 10 centimentri),
tramite una connessione di schermatura a “360°”. Ciò significa che l'intera circonferenza della canalina di
schermatura deve essere connessa al conduttore di riferimento tramite un collare metallico.
I connettori utilizzati per la conformità EN61000.4 devono essere costituiti o ricoperti di metallo e devono
consentire le connessioni di schermatura a “360°”.
I circuiti ad anello (specialmente con la terra del potenziale di riferimento) sono consigliati solo se tali connessioni
presentano bassa impedenza (< 0,1 ). Le schermature utilizzate sui connettori devono essere collegate a “360°”
a entrambe le estremità purchè si utilizzi un collegamento metallico per garantire la continuità della schermatura.
Il potenziale di riferimento deve essere a terra.
I cavi con basso potenziale non devono mai trovarsi vicino alle linee di alimentazione.
Se è presentee un riferimento di potenziale, ad esempio uno chassis o un armadio elettrico con bassa impedenza
tra I relativi componenti, deve essere utilizzato per la connessione a tutti I riferimenti per il collegamento a terra.
CORRENTE DI PERDITA VERSO MASSA
Gli apparati di potenza che includono: controllio, drive, motore, ed i relativi sensori, generano
correnti di perdita verso massa superiori a 30 mA e di frequenza elevata, pertanto i conduttori
destinati a scaricare queste correnti e realizzare una buona condizione di equipotenzialità,
devono essere di almeno di 10 mm² di sez.
Se viene utilizzato un dispositivo di protezione differenziale, deve essere:
- di tipo A per le applicazioni monofase
- di tipo B per le applicazioni trifase.
E' racommandato un livello di intervento di 300 mA.
30
Capitolo 4 – Connessioni
Xtrapuls CD1-a
2.2 - CONNESSIONE DI SCHERMATURA DEI CONNETTORI
REGOLA
La schermatura non dovrebbe mai essere interrotta o alternata per tutta la lunghezza del cavo.
Self-sticking copper ribbon if necessary,
for increasing the shield diameter in order
to get it correctly tightened
under the clamp
Motor connector for
resolver and motor
24V
0V
Metallic or metal plated plastic
SUB-D pin package
X
X8
360° shield ensured by
the tightening clamp
X
The fastening screws must
be tightened in order to ensure
the shield continuity on the
amplifier housing
INFRANOR
amplifier
SUB-D connector
U
V
W
NC
L3
L2
L1
NC
RB
RB
NOTE
In order to improve the contact and to avoid the cable shield
corruption, use the self-sticking copper ribbon of 3 M "Electrical
Specialities Division", ref. 1739-7.
X9
NOTA
Quando la connessione di schermatura a “360°” viene realizzata tramite un collare, non è necessario collegare un
cavo sul pin appropriato del connettore SUB-D.
Capitolo 4 – Connessioni
31
Xtrapuls CD1-a
2.3 - CONNESSIONE DELL' XTRAPULS CD1-a-400 DA 30A A 90A
Br +
Br U V W
Massima coppia di seraggio della connessione di terra: 3,6 Nm.
2.4 - CAVI DEL MOTORE E DEL RESOLVER
I motori, i resolver e gli encoder sono collegati a terra tramite il loro relativo involucro.
Gli ingressi dei cavi devono essere creati tramite connettori metallici che consentono la connessione di
schermatura a “360°”.
Il cavo del resolver deve essere un doppino intrecciato e schermato (sin, cos, rif,). Anche I cavi del motore devono
essere schermati e connessi a “360°” a entrambe le estremità come indicato nel diagramma delle connessioni di
schermatura.
I cavi degli ingressi encoder A, B, C, D, Z e R devono essere attorcigliati per coppie e schermati. La protezione
alle due estremità deve essere garantita da fascette metalliche. Se la protezione è realizzata da un guidafilo,
questo dovrà essere raccordato ad un'estremità allo spinotto di terra del connettore lato azionamento, con un
collegamento più corto possibile.
Verificare che la caduta di tensione sui fili dell'azionamento del cavo encoder sia compatibile con le specifiche
tecniche dell'encoder. Il valore della caduta di tensione per un dato cavo è calcolato come segue:
U[V]40.106.
con
U:
Lc:
I:
S:
LC[m].I[mA]
S[mm²]
caduta di tensione in volt
lunghezza del cavo in metri
corrente dell'encoder in milliampére (vedi specifiche tecniche)
sezione in millimetri quadri
Questa caduta di tensione implica le seguenti condizioni:
32
la scelta di un encoder con range di tensione d'alimentazione ampio
se l'encoder possiede dei fili di misura d'alimentazione (segnale SENSE), questi possono essere collegati ai
fili di alimentazione per poter ridurre della metà la caduta di tensione (segnale SENSE non è utilizzato nella
gamma degli azionamenti XtrapulsCD1)
se nessuna delle due soluzioni precedenti può essere utilizzata, l'utente deve alimentare l'encoder tramite
un'alimentazione esterna.
Capitolo 4 – Connessioni
Xtrapuls CD1-a
Esempio:
L'applicazione richiede un encoder Heidenhain alimentato a 5 V ± 5 % / 300 mA con una lunghezza del cavo di 25
m.
Tensione di alimentazione minima: 5 V ± 5 % Umax = 0,25 V sezione minima: S = 1,2 mm².
Dal momento che è difficile utillizare una sezione così importante, l'utente può:
collegare I fili del segnale SENSE ai fili dell'alimentazione di potenza, la sezione del filo richiesta rappresenta
allora la metà (0,6 mm²).
Utilizzare lo stesso tipo di encoder ma con una versione che permetta una tensione di alimentazione da 3,6
V a 5,25 V / 300 mA.
Tensione di alimentazione minina: 3,6 V Umax = 1,4 V . sezione minima : S = 0,21 mm².
I motori dotati di freno devono presentare cavi di frenatura schermati.
Lunghezza cavi:
- resolver: 100 m
- encoder: 25 m
- motore: ≤ 25 m
Per la lunghezza del cavo motore di > 25 m si consiglia:
- utilizzare la sezione massima del cavo prevista dai connettori,
- disinserire una reattanza di valore compreso tra 1 e 3 % del valore specifico del motore.
Il valore della reattanza deve essere preso in considerazione nel calcolo degli anelli di corrente. Il valore di
corrente della reattanza deve essere uguale o superiore alla taglia dell'azionamento.
La reattanza deve essere posta all'uscita dell'azionamento. L'utilizzo di una reattanza non rende necessario l'uso
del cavo schermato.
Al posto delle reattanza può essere inserito un filtro sinusoidale più complesso di tipo B84143V x R127 di Epcos.
EFFETI INDESIDERATI DEI CAVI MOTORE CON LUNGHEZZA MAGGIORE A 25 m:
- riscaldamento del modulo di potenza, del motore e del cavo;
- forti sovratensioni sull'avvolgimento motore che causano una diminuzione della loro durata.
La reattanza riduce gli effetti indesiderati sull'azionamento e sul motore, ma la stessa può subire un
surriscaldamento non trascurabile. Provvedere ad una adeguata ventilazione.
2.5 - CAVI DI COMANDO E DI COLLEGAMENTO SERIALE
Il comando del segnale analogico in ingresso CV richiede un doppino schermato. Lo schermo deve avere una
connessione "a 360°“ tramite i connettori metallici ad entrambe le estremità del cavo.
Nel comando di ingresso (CV), il cablaggio deve essere effettuato secondo la polarità tra il controller e
l'azionamento (CV + su "diff alta" del controller). La logica 0 Volt è direttamente collegata alla scocca
dell'amplificatore. La continuità del collegamento a terra è garantita dalle viti di fissaggio dei connettori sul
pannello frontale sub-D. Lo 0 Volt dell'azionamento e lo 0 Volt del controller devono essere collegati assieme per
mezzo di un filo. Lo schermo non deve essere utilizzato come filo per lo 0 Volt.
Per quanto riguarda la schermatura, il cavo di collegamento seriale va protetto in base a quanto sopracitato.
ATTENZIONE !
I cavi di comando (comando di ingresso, collegamento seriale, posizione, resolver, encoder), così come i
cavi di alimentazione deve essere collegati e scollegati con l'azionamento spento.
RICORDA: la tensione di alimentazione può rimanere diversi minuti sui terminali dei condensatori.
Il contatto può comportare danni fisici.
2.6 - CAVI DI COLLEGAMENTO DELLA RESISTENZA DI FRENATURA
Il cavo di collegamento tra l'azionamento e la resistenza di frenatura deve essere un cavo che sopporta una
tensione di 600 V e una temperatura elevata pari a 105°C.
Cavo raccomandato = UL 1015 AWG 14.
Coppia di serraggio: dp = 0,9 Nm.
Capitolo 4 – Connessioni
33
Xtrapuls CD1-a
3 - REQUISITI DI CONFORMITA' CON GLI STANDARD UL
La conformità UL richiede che l'installatore dell'azionamento rispetti alcune delle seguenti condizioni.
3.1 - CONNESSIONE TRAMITE CONNETTORI FASTON
Per l'installazione dell'azionamento, è necessario utilizzare una presa a connessione rapida certificata UL per la
messa a terra (larghezza nominale 6,35 mm) per gli apparecchi muniti di capicorda tipo FASTON.
Per gli apparechi con la presa a terra con vit, la connessione dovrà invece essere realizzata tramite capicorda a
norma UL.
3.2 - ALIMENTAZIONE A 24 V
L'utente finale devo fornire un'alimentazione a 24 VDC (ad esempio con trasformatore di isolamento) per
l'ingresso di alimentazione ausiliaria, protetta da un fusibile a 4 A elencato nelle UL.
3.3 - VALORI NOMINALI DI ALIMENTAZIONE E FUSIBILE UL
Il tipo di fusibile consigliato per applicazioni a motore è la classe RK5. La potenza massima di corto
circuito della rete non deve superare i 5000 Arms ad una tensione di 480 V, se protetto da un fusibile UL RK5
tipo A60Q40 400/70 e 400/90 per il rating.
Sull'azionamento XtrapulsCD1a-400/I, le taglie dei fusibili devono avere le seguenti caratteristiche:
CD1-a
BUSSMANN
Classe RK5
Tipo FRS-R
LITTELFUSE
Classe RK5
Tipo FLSR-ID
400/da 1,8 a 7,2
400/14
400/30 e 45
400/70 e 90
Multi-asse
FRS-R-4
FRS-R-8
FRS-R-20
FERRAZ
A60Q40
0,3 × ∑
I
1 rated amplifier
FLSR2ID
FLSR8ID
FLSR20ID
FERRAZ
A60Q40
0,3 × ∑
I
1 rated amplifier
N
N
Sull'azionamento XtrapulsCD1a-230/I la taglia del fusibile dovrà essere come indicato in tabella:
CD1-a
BUSSMANN
Classe RK5
Tipo FRN-R
LITTELFUSE
Classe RK5
Tipo FLNR-ID
34
230/da 2,25 a 10,5
230/16,5
Multi-asse
FRN-R-6
FRN-R-9
0,3 × ∑
I
1 rated amplifier
FLNR6ID
FLNR9ID
0,3 × ∑
I
1 rated amplifier
N
N
Capitolo 4 – Connessioni
Xtrapuls CD1-a
3.4 - AZIONAMENTO XTRAPULS CD1-a-230/I: DIAGRAMMA DI CONNESSIONE CON PROTEZIONI
TRAMITE FUSIBILI CERTIFICATI “UL”
(secondo quanto indicato nella sezione 3.3 di questo capitolo)
Power relay
remote control
24V
CD1-a-230/I UL
Power
OFF
24V
Power
relay
X2
18
19
20
1
14
24
23
2
10
13
X1
1
2
Motor temp.
Motor temp.
AOK(1)
AOK/
ENABLE
FC+
FCREF INPUTS
REF INPUTS
CI
CV0
RESET
RESOLVER
TC
TC
3
Resolver
signal
7
S3
S1
4
8
S2
S4
Resolver
reference
5
9
R1
R2
6
GND
X8
-
1
GND
4 A UL listed
Position
counting
+24 Vdc
17
CV+
16
CV-
15
GND
4
5
6
7
8
9
+
3
4
+ Motor brake
- 24 Vdc / 1,5 A
GND
X9
DC+
7
230 Vac 230 Vac L3
three-phase 230 Vac L2
230 Vac L1
6
5
4
DC-
3
Braking resistor
Braking resistor
2
1
AC
GND
Phase 1
Phase 2
Phase 3
Motor U phase 10
Motor V phase 9
Motor W phase 8
/Z
Z
/A
A
/B
B
230 Vac
2
M
O
T
O
R
10A
OR
3 ILIMIT
25 GND
230V
NC
Analog
speed
input
command
24 Vdc
+/-15%
isolated
6
5
4
Mains
3x400V
Power
See UL fuses table relay
100Ω/100W
X9
230 Vac R
230 Vac
single-phase 230 Vac S
400V
Power
ON
ENABLE
relay
AOK(1)
Braking
resistor
10A
Mains
230 Vac
See UL fuses table
GND
Power
relay
(1) CAUTION ! Imax = 100 mA (see AOK output specifications)
IMPORTANTE
L'installatore degli azionamenti deve usare connetori UL per il collegamento a terra (0,250 pollici o 6,35 mm
nominali).
Tutte le connessioni devono essere esclusivamente in rame.
Valore di coppia per i terminali dei collegamenti elettrici: in base alla morsettiera utilizzata.
Capitolo 4 – Connessioni
35
Xtrapuls CD1-a
3.5 - AZIONAMENTO XTRAPULS CD1-a-400/I DIAGRAMMA DELLE CONNESSIONI CON PROTEZIONE
TRAMITE FUSIBILE UL
(secondo quanto indicato nella sezione 3.3 di questo capitolo)
Power relay
remote control
CD1-a-400/I UL
24V
X2
Power
ON
AOK(1)
ENABLE
relay
Power
OFF
24V
Power
relay
18
19
20
1
14
24
23
2
10
13
X1
1
2
Motor temp.
Motor temp.
AOK(1)
AOK/
RESOLVER
TC
TC
3
ENABLE
FC+
FCREF INPUTS
REF INPUTS
CI
CV0
RESET
Resolver
signal
7
S3
S1
4
8
S2
S4
Resolver
reference
5
9
R1
R2
6
GND
X8
-
1
GND
4 A UL listed
NC
Analog
speed input
command
Position
counting
2
+24 Vdc
17
CV+
16
CV-
15
GND
4
5
6
7
8
9
/Z
Z
/A
A
/B
B
3 ILIMIT
25 GND
3
4
+
-
GND
X9
Motor U phase
Motor V phase
Motor W phase
10
9
8
DC+
7
400 Vac L3
400 Vac L2
400 Vac L1
6
5
4
DCBraking resistor
Braking resistor
3
2
1
400 Vac
three-phase
24 Vdc
+/-15%
+
230 Vac
AC
24 Vdc isolated
Motor brake
24 Vdc / 1,5 A
GND
Phase 1
Phase 2
Phase 3
M
O
T
O
R
**
Mains
3x400V
See UL fuses table
dp*
GND
!
Braking
resistor
Power
relay
* CD1-a-400/1,8 to 7,2:
dp 200/100
CD1-a-400/14:
dp 50/200
CD1-a-400/30 and 45: dp 33/280
CD1-a-400/70 and 90: dp 16.5/560
(1) CAUTION ! Imax = 100 mA (see AOK output specifications)
** 10 A for I < or = 14 A
20 A for I = 30 and 45 A
40 A for I = 70 and 90 A
IMPORTANTE
L'installatore degli azionamenti deve usare connettori UL per il collegamento di terra (0,250 pollici oppure
6,35 mm nominali).
Tutte le connessioni devono essere esclusivamente in rame.
Valore di coppia per i terminali dei collegamenti elettrici: in base alla morsettiera utilizzata.
36
Capitolo 4 – Connessioni
Xtrapuls CD1-a
X8
24 V
0V
0V
0V
X9
L1
X9
L1
***Mains
UL mounting
For the choice of the fuses,
see chapter 4, section 3.3
CD1-a
X8
24 V
CD1-a
24 VDC
X8
24 V
X9
L1
L2
L2
L2
L3
L3
L3
DC-
DC-
DC-
DC+
DC+
DC+
RB
RB
RB
RB
RB
RB
dp
CD1-a
3.6 - ESEMPIO DI CONNESSIONE PER UN'APPLICAZIONE MULTIASSE IN ACCORDO CON LE NORME UL
dp
*** CD1-a-230/I : 3 x 230 V
CD1-a-400/I : 3 x 400 V
Capitolo 4 – Connessioni
37
Xtrapuls CD1-a
Capitolo 5 - Parametrizzazione
L'impostazione dei parametri dell'azionamento avviene tramite il software Visual Drive Setup, utilizzabile con un
PC compatibile con il sistema operativo Windows ®.
Vedere il sito Web www.infranor.com per scaricare il software VISUAL DRIVE SETUP.
!
38
ATTENZIONE
La procedura di auto-tuning dovrebbe essere eseguita dal PC in modalità di controllo e di fermo.
Se la procedura di auto-tuning deve essere eseguita con l'unità controllate dal comando di
ingresso analogico CV, il valore del comando di ingresso deve essere 0 Volt. È responsabilità
dell'utente prendere tutte le misure necessarie al fine di ridurre il rischio dovuto a movimenti
incontrollati asse durante la procedura di auto-tuning.
Capitolo 5 – Parametrizzazione
Xtrapuls CD1-a
Capitolo 6 - Messa in funzione
1 - CONFIGURAZIONE DELL'AZIONAMENTO
L'azionamento XtrapulsCD1 ha una configurazione hardware per i motori MAVILOR.
Rapporto del resolver: 0,5.
Vedere il Capitolo 8, paragrafo 2, 3 e 4 per il settaggio dell'azionamento al motore o altri tipi di resolver.
2 - PRIMA ACCENSIONE DELL'AZIONAMENTO XTRAPULS CD1-a
2.1 - MOLTO IMPORTANTE
Controllare i collegamenti, in particolare del 24 VDC e l'alimentazione. Ci sono due diverse versioni di tensione
dell'amplificatore: 230 VAC e 400 VAC. Controllare l'etichetta sull'azionamento. Il collegamento 400 VAC di un
azionamento da 230 V lo distruggerà.
Controllare il dimensionamento della resistenza di frenatura:
- dp 100/100 per 230 VAC
- dp 200/100 per 400 VAC da 1,8 a 7,2.
- dp 50/200 per 14 A
- dp 33/280 per 30 e 45
- dp 16,5/560 per 70 e 90 A
Il segnale ENABLE (connettore X2, pin 20) deve essere disattivato e il comando di ingresso analogico CV
(connettore X2, perni 16/17) va in cortocircuito.
Controllare la corretta connessione a 360 ° dei cavi schermati.
!
ATTENZIONE
Durante le regolazioni della macchina, alcuni errori di connessione o di impostazione dei
parametri possono comportare pericolosi movimenti degli assi. È responsabilità dell'utente
prendere tutte le misure necessarie al fine di ridurre il rischio dovuto algli assi incontrollati o
alla presenza degli operatori 'nella zona interessata.
2.2 - ALIMENTAZIONE 24 V
Il pannello frontale verde "ON" Led deve accendersi.
La bassa tensione viene visualizzata sul display.
Il relè AOK (pin 18 e 19 X2) è chiuso. Quindi è possibile controllare il relè di potenza in funzione a quanto
descritto nel capitolo 4 sezione 1 (schemi di collegamento).
Collegamento secondo la targhetta X8.
2.3 - ALIMENTAZIONE 230 o 400 VAC (a seconda del tipo di amplificatore).
Usare lo schema delle connessioni di potenza, tenendo conto del segnale AOK.
Il segnale rosso di bassa tensione, si accenderà dopo pochi secondi.
L'azionamento è pronto per la messa in servizio mediante il software Visual Drive Setup (vedere la sezione
successiva).
L'azionamento deve essere acceso nel seguente ordine:
- alimentare il 24 V
- chiudere I contatti relè AOK
- alimentare la potenza.
In caso contrario, potrebbe causare danni materiali all'azionamento.
!
ATTENZIONE
.
E 'obbligatorio attendere almeno 30 secondi tra lo spegnimento e riaccensione l'unità.
Capitolo 6 - Messa in funzione
39
Xtrapuls CD1-a
3 - MESSA IN FUNZIONE E REGOLAZIONE DELL'AZIONAMENTO
I cavi dell'azionamento di comando (comando di ingresso, collegamento seriale, resolver, encoder,
HES), così come i cavi di alimentazione devono essere collegati e scollegati con l'amplificatore
spento.
!
3.1 - COMUNICAZIONE TRAMITE CAVO SERIALE
Collegare il cavo seriale RS 232 tra il PC e l'azionamento.
L'ingresso ENABLE deve essere disattivato e il comando di ingresso analogico CV deve essere ponticellato.
Accendere l'azionamento e avviare il programma VISUAL DRIVE SETUP installato sul PC.
Se compare il messaggio "Nessuna comunicazione seriale trovata", fare clic su OK e controllare i seguenti punti:
- azionamento acceso (il LED verde deve essere acceso),
- controllare il corretto funzionamento del cavo seriale RS 232,
- controllare la corretta configurazione del software (porta Com. e Baudrate).
3.2 – CONFIGURAZIONE DEL SENSORE DI FEEDBACK
E' selezionabile via software ed è memorizzato nella EEPROM dell'azionamento.
Il Resolver fa parte della configurazione standard dell'azionamento. Per un motore dotato di un sensore di
posizione encoder procedere come descritto di seguito:
Selezionare il tipo di encoder appropriato nel menu di configurazione Feedback.
Selezionare quindi feedback Encoder e convalidare la selezione.
Se il motore utilizza sensori ad effetto Hall: controllare che l'ingresso ENABLE sia disattivato e l'azionamento
acceso, muovere manualmente il motore, e spostarlo di una rivoluzione, o un passo polare per un motore lineare.
Se l'errore HES è visualizzato, spegnere l'azionamento e verificare i seguenti punti prima di accenderlo di nuovo:
-
le sonde HES sono cablate correttamente sull'azionamento, connettore X3 (se sono a 60 ° controllare le varie
combinazioni dei segnali HES di cablaggio per trovare il giusto ordine di cablaggio).
-
Il valore correto di tensione di alimentazione delle sonde HES.
-
Controllare il settaggio dei parametri della risoluzione encoder.
Se il motore con HES non funziona correttamente, selezionare il tipo di encoder incrementale appropiato (senza
HES) nel menu di configurazione di feedback e avviare il funzionamento dell'azionamento in questa
configurazione.
Se il motore utilizza un encoder assoluto singolo giro Sin/Cos (Heidenhain ERN 1085 o compatibile), verificare
che l'ingresso ENABLE sia disattivato e l'azionamento acceso, spostare manualmente il motore di una
rivoluzione. Se l'errore HES è visualizzato, spegnere l'amplificatore e verificare i seguenti punti prima di
accenderlo di nuovo:
-
I canali di commutazione encoder Sin/Cos siano cablati correttamente al connettore X3,
-
Controllare la corretta alimentazione dell'encoder,
-
Controllare il corretto settaggio dell'encoder.
Eseguire il comando Salva parametri da EEPROM prima di spegnere l'azionamento in modo da salvare la
configurazione di feedback.
3.3 - REGOLAZIONE DELL'AZIONAMENTO
40
Selezionare il motore appropriato dalla lista motori.
Controllare il corretto settaggio dei parametri di limitazione di corrente adeguate al motore e specifiche
dell'azionamento, per la messe in servizio è raccomandata la modalità fusing”I2t " (vedi capitolo 8, sezione
3.2).
Capitolo 6 - Messa in funzione
Xtrapuls CD1-a
Se la configurazione dell'encoder incrementale è senza sensore di feedback HES, avviare il motore
mediante la procedura di Phasing.La procedura può essere effettuata nella finestra di comando del
software Visual Drive Setup o mediante l'attivazione dell'ingresso CV0.
Se il motore usato per l'applicazione non è presente nella Lista dei motori, selezionare il comando Nuovo
motore e seguire le istruzioni.
Controllare che la limitazione della velocità sia compatibile col motore specificato.
Selezionare la risoluzione di uscita Encoder per chiudere il ciclo posizione con NC.
Selezionare la regolazione di velocità (P, PI o PI2). Nel caso di un carico verticale vedere sezione 3.3.
Avviare la procedura di auto-tuning e verificare che non sia pericolosa per l'operatore. Verificare il carico
verticale.
ATTENZIONE
La procedura di auto-tuning dovrebbe essere eseguita dal PC a motore fermo. Se la procedura
di auto-tuning deve essere eseguita dal comando di ingresso analogico CV, il valore del
comando di ingresso deve essere 0 Volt. È responsabilità dell'utente prendere tutte le misure
necessarie al fine di ridurre il rischio dovuto a movimenti incontrollati dell'asse durante la
procedura di auto-tuning.
!
In caso di forte rumore a motore fermo o durante il funzionamento, verificare la rigidità della trasmissione tra
motore e carico (contraccolpi ed elasticità, ingranaggi e giunti). Se è necessario, avviare la procedura di autotuning, e selezioniamo una larghezza di banda inferiore. Se il problema persiste, rinnovare l'auto-tuning mentre
viene attivato il filtro anti risonanza.
Avviare la funzione di compensazione offset o avviare la compensazione offset mediante il pulsante di
offset posto sul pannello frontale dell'amplificatore.
Verificare che il motore funzioni correttamente in entrambe le direzioni in modalità di comando di velocità
in ingresso digitale. Se necessario, regolare i parametri del regolatore di velocità per mezzo del pulsante
di stabilità.
3.4 - PARAMETRI DI REGOLAZIONE DI UN MOTORE LINEARE
Il parametro di risoluzione encoder del motore è calcolato come descritto di seguito:
N
S
N
S
N
S
Magneti motore
Passo Polare
Poli del motore (mm)
Risoluzione encoder = 1000 x
Segnale encoder (μm)
!
1 segmento del segnale encoder = 4 conteggio incrementi
Il valore id velocità massima del motore in giri/min è calcolato secondo la seguente formula:
Massima velocità (rpm) = 60 x
1000
x massima velocità motore (m/s)
Poli motore (mm)
Capitolo 6 - Messa in funzione
41
Xtrapuls CD1-a
Il valore di velocità lineare in m/s viene calcolato secondo la seguente formula:
Velocità lineare (m/s) =
Velocità motore (rpm)
Poli motore (mm)
x
1000
60
3.5 - AGGIUSTAMENTO VELOCITA' CON CARICO VERTICALE
Nel caso di un asse con carico squilibrato (coppia costante per l'effetto gravità su un asse verticale), la
configurazione dell'encoder incrementale senza HES non è valida perché la procedura all'accensione
non può essere eseguita.
!
Avviare la procedura di auto-tuning con il motore staccato dal suo carico meccanico, al fine di inizializzare i
guadagni di velocità del ciclo. Selezionare la modalità di limitazione della funzione I²t (vedere capitolo 8, sezione
3.2). Quindi selezionare il regolatore di velocità (PI o PI²). Accoppiare il motore al carico e spostare di nuovo
l'albero per mezzo del comando di ingresso digitale di velocità fino a quando la sua posizione di stallo in cui la
rotazione dell'albero su una rivoluzione non è pericoloso per l'operatore e la macchina.
Eseguire il comando auto-tuning con il motore attivato nella sua posizione di stallo (zero comando di velocità in
ingresso). In caso di forte rumore nel motore quando è fermo o durante l'esecuzione, verificare la rigidità della
trasmissione tra motore e carico (contraccolpi ed elasticità in ingranaggi e giunti). Se necessario, avviare la
procedura di auto-tuning, mentre selezionando una larghezza di banda inferiore. Se il problema persiste,
rinnovare l'auto-tuning mentre viene attivato il filtro anti risonanza.
3.6 - SALVATAGGIO PARAMETRI AZIONAMENTO
Salvare tutti I parametri nella EEPROM dell'azionamento, tramite la funzione salvataggio parametri nella
EEPROM.
3.7 - MOTOR PHASING ALL'ACCENSIONE
Nella configurazione dell'encoder incrementale senza HES, la procedura di Motor Phasing deve essere eseguita
secondo il seguente schema:
AOK
Power On
ENABLE
CV0
PHASING OK
Alimentazione
Fine alimentazione
!
42
Phasing
Pronto
Partenza phasing
Stop
Fine phasing
Funzionamento
Part. funzion.
In caso di un asse con carico verticale (coppia costante per l'effetto di gravità su un asse
verticale), la procedura di motor phasing non è valida. Il motore deve essere dotato di un
encoder incrementale o HES o un encoder assoluto Sin/Cos.
Capitolo 6 - Messa in funzione
Xtrapuls CD1-a
L'uscita analogica del connettore X3 può essere configurato nel menu di configurazione del software Visual Drive
Setup, al fine di ottenere il segnale di uscita OK (tensione di uscita da 0 V a 10 V quando il motore phasing è
OK).
RICORDA: Nella configurazione di encoder incrementale senza HES, la procedura di motor Phasing deve essere
eseguita di nuovo dopo il segnale di feedback guasto o il segnale di errore di conteggio. La procedura di motor
phasing deve essere effettuata anche dopo la modifica del motore o il valore di un parametro dell'encoder.
3.8 - EMULAZIONE DEL MOTORE PASSO-PASSO
L'emulazione del motore passo-passo è possibile solo nei motori con resolver. I segnali di Pulse e direction sono
ricevuti dall'azionamento sui pin di ingresso encoder TTL. .
- Selezionare l'emulazione di Stepper nella finestra di configurazine del sensore di posizione.
- Avviare la procedura di auto-tuning selezionando la modalità di Posizione.
Nota: la stabilità della posizione, può essere testata con la modalità di velocità PI2 perchè I guadagni di feedback
sono identici alla modalità di posizione.
- immettere il valore del parametro di risoluzione nella finestra Scaling come mostrato qui sotto:
Risoluzione della posizione = 2 x numero di impulsi emessi dal controllo per giro motore.
- Impostare a 0 il valore del parametro di Positione deadband. Questo parametro è utile solo per applicazioni con
elevati contraccolpi di trasmissione o con elevati attriti sull'asse. In questi casi, quando il valore di errore di
posizione è inferiore al valore del parametro di deadband, il guadagno proporzionale del ciclo di posizione è
fissato a 0.
- Attivare l'azionamento e verificare lo spostamento dell'asse durante l'esecuzione del programma.
- se gli assi non si muovono, controllare che l'ingresso CV0 sia disabilitato.
- Se il motore è rumoroso durante lo spostamento dell'asse, il guadagno di accelerazione Feedforward deve
essere fissato a 0.
- Se il motore si sta muovendo nella direzione opposta a quella prefissata, selezionare il comando di movimento
inverso nella finestra del limite di velocità.
3.9 - SOFTWARE GEARING APPLICATION
Richiede l'uso dell'azionamento col secondo sensore di posizione per misurare gli spostamenti dell'asse master
- Se il motore è dotato di un resolver, selezionare il tipo di encoder per l'ingresso del secondo sensore di
posizione nella parte di configurazione encoder.
- Quando si utilizza un encoder master SinCos, regolare il parametro di fattore posizione della scala nella finestra
del secondo sensore. In caso contrario, fissato a 1 il valore del parametro di fattore di posizione di scala.
- Eseguire il comando di auto-tuning selezionando la modalità Posizione.
Nota: la stabilità della posizione può essere testata in modalità velocità PI² perchè I guadagni di feedback sono
identiche alla modalità di posizione.
- Quando si utilizza un encoder master, immettere il valore del parametro di rizoluzione di posizione nella finestra
Scaling, come descritto di seguito:
Risoluzione della posizione = (4 x numero di impulsi encoder / canale per un asse giro dell'encoder master x
fattore di scala di posizione / rapporto di riduzione.
Rapporto di riduzione = velocità del motore / encoder Master velocità
- Quando si utilizza un resolver master, immettere il valore del parametro di risoluzione di posizione nella
finestra Scaling, come descritto di seguito:
Risoluzione della posizione= (65536 x Fattore di scala di posizione) / Rapporto di riduzione
Rapporto di riduzione = velocità motore / Velocità resolver master
Capitolo 6 - Messa in funzione
43
Xtrapuls CD1-a
- Impostare a 0 il valore del parametro di Positione deadband. Questo parametro è utile solo per applicazioni con
elevati contraccolpi di trasmissione o con elevati attriti sull'asse. In questi casi, quando il valore di errore di
posizione è inferiore al valore del parametro di deadband, il guadagno proporzionale del ciclo di posizione è
fissato a 0.
- Abilitare l'azionamento e verificare che l'asse “slave” segue lo spostamento dell'asse “master” con il rapporto di
riduzione corretto.
- Se l'asse “slave”, non esegue lo spostamento dell'asse “master” controllare che l'ingresso CV0, sia
disattivato.
- Se durante il movimento dell'asse, se il motore è ruomoroso, impostare a 0 il guadagno di accelerazione
Feedforward. Se si utilizza un encoder master SinCos, controllare anche che il comando interpolazione Pulse la
funzione è attivata nella finestra del secondo sensore.
- Se la direzione di movimento non è corretta, selezionare il comando “Reverse”, che si trova nella finestra del
secondo sensore di movimento, nella finestra "Speed limit".
44
Capitolo 6 - Messa in funzione
Xtrapuls CD1-a
Capitolo 7 - Risoluzione dei problemi
1 - DIFETTI
1.1 - DIFETTI DEL SISTEMA
Se il LED rosso del segnale SYS è acceso quando l'azionamento è in funzione, la scheda logica non è operativa.
- se nel caso i 4 LED di errore lampeggiano, caricare il firmware dell'azionamento tramite il collegamento seriale
utilizzando il software CD1 Updater.
-
Controllare l'eventuale presenza di residui di polvere che può condurre cortocircuiti sulla scheda logica
dell'azionamento.
1.2 - "BUSY" FAULT
Se il guasto BUSY viene riprodotto in modo permanente dopo aver acceso l'azionamento, la procedura
AUTO-TEST è fallita e l'azionamento non è pronto per il funzionamento. Verificare che la tensione di
alimentazione non viene attivata prima dell'alimentazione a 24 V (vedi schemi di collegamento al Capitolo 4,
sezione 1).
Se l'errore BUSY viene continuamente visualizzata dopo l'esecuzione della procedura di “motor phasing”
(encoder incrementale configurazione senza HES), la procedura non è riuscita a causa di un problema
esterno e il valore calcolato della fase è sbagliato. Controllare il corretto valore del parametro di risoluzione
encoder del motore. Controllare i corretti parametri motore (coppie poli e l'ordine di fasi). Controllare che
l'ingresso ENABLE sia attivato. Controllare che gli ingressi dei finecorsa non sono attivati. Verificare che il
motore non è bloccato e che l'albero motore sia libero durante l'esecuzione della procedura.
Se l'errore BUSY viene continuamente visualizzata dopo l'esecuzione della funzione auto-phasing, la
procedura non è riuscita a causa di un problema esterno e i parametri calcolati sono errati. Controllare che
l'ingresso ENABLE sia aperto. Controllare che gli ingressi di finecorsa non siano attivi. Poi controlla che
l'albero motore sia libero di muoversi durante la procedura.
Se l'errore BUSY viene continuamente visualizzata dopo l'esecuzione della funzione auto-tuning, la
procedura non è riuscita a causa di un problema esterno e i parametri calcolati sono errati. Controllare che
l'ingresso ENABLE sia aperto. Controllare che gli ingressi finecorsa non sono attivi. Quindi controllare che
l'albero motore sia libero durante la procedura.
Se l'errore BUSY viene continuamente visualizzato dopo l'esecuzione della funzione di compensazione di
offset, la compensazione è superiore a 0,5 Volt. Controllare la tensione sull'ingresso CV durante la
procedura.
Se l'errore BUSY viene continuamente visualizzata dopo l'esecuzione della procedura di acquisizione di
cogging, la procedura non è riuscita a causa di un problema esterno e l'acquisizione di cogging non è riuscito.
Controllare che l'ingresso ENABLE sia attivato. Controllare che gli ingressi CI e CV0 non siano attivati.
Controllare che gli ingressi dei finecorsa non siano attivati. Verificare che l'encoder sta fornendo un impulso
per giro al motore. Verificare che l'abero motore sia libero di muoversi durante la procedura. Controllare che il
valore della corrente del motore corrispondente alla coppia di cogging, inferiore al 5 % della corrente
nominale dell'amplificatore.
1.3 - " GUASTO DELLA "EEPROM"
Controllare la presenza della EEPROM e il suo corretto posizionamento.
Se il difetto persiste, la EEPROM non è correttamente inizializzata (CHECKSUM) o non è conforme con la
versione software dell'azionamento.
Capitolo 7 – Risoluzione dei problemi
45
Xtrapuls CD1-a
1.4 - GUASTO "TEMPERATURA MOTORE"
Se l'errore si verifica all'accensione dell'azionamento:
Modificare il tipo di sensore termico (CTP o CTN) mediante il software Visual Drive Setup. Eseguire il reset
degli errori.
Controllare il collegamento tra il sensore termico e l'azionamento sul connettore X1 presente nel pannello
frontale.
Se l'errore si verifica durante il funzionamento:
Controllare la temperatura del motore e ricercare le possibili cause del sovrariscaldamento (sovraccarico
meccanico dell'albero, ciclo di lavoro eccessivo, motore sottodimensionato per le esigenze della
macchina,...).
1.5 - "ERRORE DI BASSA TENSIONE” (non memorizzata)
Quando si accende l'alimentazione a 24 VDC, l'azionamento XtrapulsCD1-a visualizza l'errore di bassa tensione.
Il LED si spegne quando si accende la tensione di alimentazione, dopo qualche secondo di ritardo, che
corrisponde alla precarica soft start dei condensatori di potenza. Se il guasto rimane dopo il passaggio sulla rete
di alimentazione:
Controllare che l'alimentazione sia presente.
1.6 - "POWER STAGE" GUASTO
L'errore POWER STAGE dipende da tutti I gruppi di potenza guasti:
o
o
o
o
o
o
o
o
o
Sovratensione di alimentazione.
Corto circuito tra fase e terra.
Corto circuito tra le fasi.
Ventola
Potenza in cortocircuito
Sovratemperatura (solo su XtrapulsCD1-a-400/I).
Errore PWM.
Alimentazione stadio di potenza.
Errore nel sistema di frenatura (transistor in cortocircuito o ciclo troppo alto).
Il software VISUAL DRIVE SETUP permette di identificare l'errore di “Power stage”.
Se l'errore si verifica all'accensione dell'azionamento:
Controllare la tensione sul connettore X9 fasi, L1 - L2 - L3.
Azionamento CD1-a-230/I: 196 VAC < VAC < 253 VAC
Azionamento CD1-a-400/I: 340 VAC < VAC < 528 VAC
Se l'errore si verifica durante il funzionamento:
Controllare il sistema di frenatura durante le fase di decelerazione.
Controllare il dimensionamento della resistenza di frenatura per quanto riguarda le fasi di decelerazione del
motore.
Controllare il ciclo dell'azionamento (vedere capitolo 2, sezione 1).
Controllare che non ci siano corto circuiti nel cablaggio del motore.
Controllare che non ci siano cortocircuiti tra il motore e la terra.
1.7 - ERRORE NELLA CONFIGURAZIONE DEL FEEDBACK
Controllare il collegamento del resolver al connettore X1 dell'azionamento.
Controllare che il resolver utilizzato sia corretto.
46
Capitolo 7 – Risoluzione dei problemi
Xtrapuls CD1-a
Verificare le connessioni tra resolver ed azionamento drive.
1.8 - ALLARME "RDC " IN CONFIGURAZIONE DI FEEDBACK RESOLVER
Se l'errore si verifica durante la messa in funzione:
Controllare che il resolver utilizzato sia corretto.
Se l'errore si verifica durante il funzionamento:
Verificare che le connessioni tra il resolver e l'azionamento siano conformi alle a quanto descritto negli
schemi di cablaggio.
1.9 - ALLARME DI "FEEDBACK" ENCODER
Controllare il collegamento dell'encoder, all'azionamento, connettore X3.
Controllare le connessioni A e B dell'encoder, connettore X3.
Ricorda: Nella configurazione di encoder incrementale senza HES, la procedura di “motor Phasing” deve essere
eseguita di nuovo dopo la risoluzione del guasto Feedback.
1.10 - ERRORE DI CONTEGGIO ENCODER
Controllare il collegamento di zero al connettore X3 del canale di zero. Se l'encoder non è provvisto di un segnale
di uscita di zero, il canale deve essere disabilitato in modo da annullare l'errore di conteggio. Il canale ad impulsi
di zero può essere disabilitato impostando a 0 il parametro di Zero mark pitch.
!
Quando l'indicatore di canale di zero è stato disattivato, il conteggio dell'encoder non è più attivo. In
questo caso, gli impulsi dell'encoder producono rumori, si possono avere dei movimenti incontrollati del
motore che possono essere pericolosi per l'operatore e la macchina.
Configurazione per l'encoder incrementale TTL:
Controllare il corretto valore della tensione di alimentazione dell'encoder.
Controllare il corretto cablaggio della messa a terra dell'encoder, vedi capitolo 4.
Controllare il corretto funzionamento dei canali dell'encoder A, B e Z segnale delle forme.
A
A
A/
A/
B
B
B/
B/
Z
Z/
Z
Z/
Forward direction
Reverse direction
Verificare che le condizioni del valore massimo della frequenza e degli impulsi dell'encoder a velocità
massima del motore siano:
Max. velocità motore (rpm) < 60 x 106 / Numero di impulsi dell'encoder per giro
Max. velocità motore (rpm) < 60 x limite frequenza impulsi dell'encoder (Hz) / Numero di impulsi dell'encoder
per giro.
Verificare che la risoluzione dell'encoder e “zero mark pitch” siano corretti.
Controllare che il numero di impulsi dell'encoder tra due impulsi di zero successivi, è pari al valore di
rizoluzione dell'encoder moltiplicato per il valore del parametro Zero mark pitch. Se questa condizione non è
soddisfatta, il conteggio dell'encoder deve essere disabilitato in modo da annullare l'errore di conteggio. Il
Capitolo 7 – Risoluzione dei problemi
47
Xtrapuls CD1-a
codificatore di conteggio di protezione può essere disabilitato impostando a 0 il parametro Zero mark pitch.
Per un motore lineare con un solo impulso sul motore, il parametro Zero Mark deve essere impostato a 15. In
questo caso il conteggio dell'encoder verifica che la posizione misurata dell'encoder abbia sempre lo stesso
valore quando il segnale è attivo.
!
Quando il conteggio dell'encoder è stato disattivato, l'azionamento controlla unicamente che la
frequenza di impulsi di encoder è inferiore a 1,5 volte la frequenza encoder massima. La frequenza
massima viene calcolata in base al valore di: Motor Encoder Resolution e massima velocità. In
questo caso, rumori sull'encoder ad una frequenza inferiore a 1,5 volte la massima frequenza, si
possono generare dei movimenti incontrollati del motore.
Ricorda: Nella configurazione con encoder incrementali TTL senza HES, la procedura di Motore Phasing deve
essere eseguita nuovamente dopo aver cancellato l'errore.
Configurazione encoder Sin/Cos:
Controllare la corretta tensioni di alimentazione dell'encoder.
Controllare il corretto cablaggio della messa a terra tra encoder,azionamento e motore vedi capitolo 4.
Controllare il corretto funzionamento dei canali dell'encoder A, B e R.
A
A
A/
A/
B
B
B/
B/
R
R/
R
R/
Forward direction
Reverse direction
Verificare che la risoluzione dell'encoder e i valori di parametrizzazione zero pitch siano corretti.
Controllare che il numero di impulsi dell'encoder tra I due segnali successivi di riferimento R è uguale al
valore di risoluzione dell'encoder moltiplicato per il valore del parametro Zero marko pitch. Se questa
condizione non è soddisfatta,il conteggio dell'encoder deve essere disabilitato in modo da annullare l'errore di
conteggio. Il conteggio può essere disabilitato impostando a 0 il parametro Zero mark pitch.
Per un motore lineare con un solo impulso sul motore, il parametro di altezza Zero Mark deve essere
impostato a 15. In questo caso il conteggio dell'encoder è verificare che la posizione misurata dell'encoder ha
sempre avuto lo stesso valore quando il segnale è attivo.
!
48
Quando il conteggio dell'encoder è stato disattivato, l'azionamento unicamente controlla che la
frequenza di impulsi di encoder è inferiore a 1,5 volte la frequenza encoder massima. La
frequenza massima viene calcolata in base al valore di: Motor Encoder resolution e massima
velocità. In questo caso, rumori sull'encoder ad una frequenza inferiore a 1,5 volte la massima
frequenza, si possono generare dei movimenti incontrollati del motore che può essere
pericoloso per l'operatore e la macchina.
Capitolo 7 – Risoluzione dei problemi
Xtrapuls CD1-a
Ricorda: Nella configurazione con encoder incrementali TTL senza HES, la procedura di Motore Phasing deve
essere eseguita nuovamente dopo aver cancellato l'errore.
Capitolo 7 – Risoluzione dei problemi
49
Xtrapuls CD1-a
1.11 - ALLARME "HES"
Configurazione per encoder incrementale & HES:
Controllare che le sonde di Hall siano cablate correttamente sul connettore X3 dell'azionamento (con sonde
di tipo 60°, controllare il cablaggio e le combinazioni diverse per trovare il giusto ordine di cablaggio).
Controllare la giusta alimentazione delle HES
Controllare I corretti parametri dell'encoder.
Controllare il corretto cablaggio della messa a terra vedi capitolo 4.
Configurazione per encoder a giro singolo Sin/Cos assoluto:
Controllare che I canali Sin/Cos dell'encoder siano cablati correttamente sul connettore X3 dell'azionamnto.
Controllare il corretto valore di alimentazione.
Controllare il segnale del canale C Sin/Cos e del canale D.
Controllare il corretto valore di risoluzione del parametro Motor Encoder Resolution
Verificare la corretta messa a terra e le schermature vedi capitolo 4.
1.12 - ALLARME "I2T"
Controllare il valore della corrente nominale vedi capitolo 2, sezione 1.
Controllare la corrente nominale dell'azionamento nel parametro Corrente nominale per quanto riguarda il
ciclo di funzionamento.
1.13 - ERRORI DI INSEGUIMENTO
Azionamento in SPEED MODE (P, PI, PI²)
L'errore di inseguimento corrisponde a un errore di inseguimento dell'anello di velocità.
Controllare che il carico sia adatto al motore e ai vari tipi di azionamento.
Ridurre le accellerazioni/decellerazioni.
Controllare che l'asse non è posizionato su un fermo meccanico
Controllare la regolazione dell'anello di velocità
Controllare che il valore del parametro della soglia di errore di velocità sia conforme al ciclo di funzionamento.
Se necessario, aumentare il valore di questo parametro.
Azionamento in POSITION MODE
L'errore di inseguimento corrisponde a un errore di inseguimento dell'anello di posizione.
Controllare che il carico sia adatto al motore ed al tipo di azionamento.
Ridurre le accellerazioni/Decellerazioni.
Controllare che gli assi non siano posizionati su un fermo meccanico.
Controllare la regolazione dell'anello di posizione
Controllare che il valore del parametro della soglia dell'errore di insequimento sia conforme al ciclo di
funzionamento. Se necessario, aumentare il valore di questo parametro.
2 - PROBLEMI OPERATIVI
2.1 - IL MOTORE NON SI MUOVE
Controllare che l'azionamento si acceso (24 VDC).
Controllare che la potenza sia attiva.
Controllare le connessioni del motore.
Controllare il cablaggio dei segnali di logica FC+, FC- e ENABLE (capitolo 8, sezione 4).
50
Capitolo 7 – Risoluzione dei problemi
Xtrapuls CD1-a
2.2 - MOTORE ACCESO MA NON IN COPPIA
Controllare I parametri di Maximum current e Rated current, non devono essere messi a zero.
Controllare che l'azionamento non funzioni in modalità di coppia (comando CI attivo) con segnale di zero in
ingresso.
2.3 - ALBERO BLOCCATO, OSCILLAZIONI IRREGOLARI O MOTORE ALLA MASSIMA VELOCITA'
Controllare il cablaggio del resolver o dell'encoder sul connettore dell'azionamento e il montaggio meccanico
del sensore di posizione di feedback sul motore.
Verificare la correta scelta del motore nella lista dei motori presente nell'azionamento.
Controllare il valore dei parametri del motore nel menu Funzioni avanzate ed eseguire il comando autophasing nuovamente, con motore a vuoto (vedere capitolo 6, sezione 3).
2.4 - DISCONTINUA ROTAZIONE DEL MOTORE IN POSIZIONE A COPPIA A ZERO
Controllare il collegamento tra azionamento e motore.
2.5 - MOVIMENTO DEL MOTORE CON INGRESSO ANALOGICO CON VELOCITA' ZERO
Controllare che il cablaggio di comando in ingresso tra il controllore e l'amplificatore sia conforme a quanto
descritto nel capitolo 4 (CV- a diff. Bassa del CN Cavo e o Volt).
Controllare la compensazione offset e, se necessario, eseguire il comando Offset di compensazione.
2.6 - MOTORE RUMOROSO DA FERMO
Controllare che i collegamenti di messa a terra siano conformi a quanto descritto nel capitolo 4.
Controllare che il cablaggio del comando di velocità in ingresso CV tra controllore ed azionamento è
conforme a quanto descritto nel capitolo 4 e verificare il collegamento della schermatura dei cavi resolver lato
motore e lato amplificatore.
2.7 - MOTORE RUMOROSO DA FERMO E IN ROTAZIONE
Verificare la rigidità della catena di trasmissione meccanica tra motore e carico (gioco e elasticità negli
ingranaggi e giunti).
Eseguire il comando di auto-tuning scegliendo una larghezza di banda inferiore (media o bassa).
Se il problema persiste, eseguire nuovamente l'auto-tuning attivando il filtro di antirisonanza
(Filtro = Antiresonanza).
2.8 - CONTROLLO DI POSIZIONE NON POSSIBILE CON NC
Controllare la presenza dei segnali A, B e Z sul connettore X2 dell'azionamento agendo manualmente
sull'albero motore e controllare il cablaggio tra NC e l'azionamento.
Controllare il senso di conteggio del NC, la polarità del comandi di velocità in entrata. Se c'è un
rovesciamento, utilizzare la funzione Reverse di Movimento nel software Visual Drive Setup per ripristinare
un corretto funzionamento.
Capitolo 7 – Risoluzione dei problemi
51
Xtrapuls CD1-a
3 - ASSISTENZA E MANUTENZIONE
Quando si cambia un'azionamento su una macchina procedere come segue:
Eseguire la copia della EEPROM nel nuovo azionamento.
Applicare un comando a zero velocità in entrata sull'ingresso CV e avviare la procedura di compensazione
dell'offset per mezzo del pulsante sul pannello frontale dell'azionamento.
Il nuovo azionamento è configurato come quello da sostituire.
52
Capitolo 7 – Risoluzione dei problemi
Xtrapuls CD1-a
Capitolo 8 - Appendice
1 - AGGIUSTAMENTO HARDWARE
Tutte le regolazioni hardware del XtrapulsCD1-a sono localizzate di seguito.
Capitolo 8 – Appendice
J1
EEPROM Parameter
Always closed
jumper
Serial link option:
RS-232: closed
RS-422: open
S1
RS
Amplifier address
BM
U11
X5
LOGIC BOARD
01685
Encoder 5 V supply
fuse
F1
J2
MAPPA DEI SETTAGGI HARDWARE
53
Xtrapuls CD1-a
2 - ADATTAMENTO A VARI TIPI DI RESOLVER
Per il collegamento di resolver, vedere seguente schema elettrico del connettore X1, nonché schema del
produttore:
S2
X1
8
Sin
S4
S3
4
3
Cos
S1
R2
Ref
R1
7
9
5
6
Per l'uso di resolver con rapporti di trasformazione fuori dal range di 0,3 - 0,5, la regolazione deve essere
impostata in fabbrica da INFRANOR.
Nota:
Quando si utilizza resolver con un numero di coppie di poli N > 1, tutti i valori di velocità visualizzati
nell'azionamento sono pari a N volte la velocità di rotazione del motore.
3 - ADATTAMENTO A VARI TIPI DI MOTORE
3.1 - SENSORE TERMICO DEL MOTORE
Il sensore termico è collegato al connettore X1 del resolver, pin 1 e 2.
Il motore può essere equipaggiato sia con un sensore NTC (resistenza ohmica = funzione decrescente di T °) o
con un sensore PTC (resistenza ohmica = funzione crescente di T °).
La soglia errore di T° del motore consente di immettere il valore ohmico (kOhm) del sensore corrispondente al
valore di temperatura desiderata per l'attivazione del T · Protezione del motore.
La soglia errore di T° del motore consente di immettere il valore ohmico (kOhm) corrispondente al valore di
temperatura desiderata per l'avviso di protezione del motore T °.
Quando il segnale di allarme della temperatura viene raggiunto, viene visualizzato sul pannello frontale
dell'azionamento. Quando la temperatura di attivazione è raggiunta, l'azionamento è disattivato.
Nota:
Quando si utilizza un sensore NTC, il valore ohmico sarà superiore o uguale al valore ohmico di innesco.
Quando si utilizza un sensore di PTC, il valore ohmico sarà inferiore o uguale al valore ohmico di innesco.
Valori di default dei parametri sonda termica per motori MAVILOR:
54
o
sensore PTC: la protezione avverrà per un valore di circa 3,3 kOhm della resistenza di sensore termico,
che è di cerca 140°C.
o
sensore NTC: la protezione avverrà per un valore di circa 3,3 kOhm della resistenza di sensore termico,
che è di circa 140°C.
Capitolo 8 – Appendice
Xtrapuls CD1-a
3.2 - PROTEZIONE I2t
Sono disponibili 2 diverse modalità: Fusing o Limiting.
E' consigliabile utilizzare la modalità Fusing durante la messa a punto dell'asse.
Nella modalità Fusing la corrente del motore è limitata al valore definito nel parametro Rated current al
raggiungimento della soglia di corrente.
Nella modalità Limiting, la corrente è limitata al valore definito dal parametro Rated current al raggiungimento
della soglia.
3.2.1 - PROTEZIONE DI CORRENTE IN MODALITA' FUSING
Quando la corrente RMS erogata dal'azionamento raggiunge l'85 % del valore impostato, il LED I²t fault
lampeggia (t1 nello schema), e se il valore non scende al di sotto dell'85 % entro 1 secondo, l'errore I2t è
confermato e il drive disabilitato.
Quando la corrente RMS erogata dal drive raggiunge il valore impostato, l'I2t limita la corrente erogata a tale
valore (t2 nello schema).
Schema della limitazione di corrente in caso di sovraccarico o blocco dell'albero motore:
Drive output current
t1 = Blinking
Max. current
t2 = Current limitation
2
t3 = I t error
Rated current
1 second
time
t0
t1
t2
t3
Il tempo massimo dopo il quale interviene il lampeggio dipende dal valore dei parametri Rated current e Max.
current. Questo valore è calcolato come segue:
T dyn (secondi) = t1-t0 = 3,3 x Rated current (A) / Max. current (A)2
Il tempo massimo dopo il quale interviene la limitazione dipende dal valore dei parametri sopra citati. Questo
valore è calcolato come segue:
T max (second) = t2-t0 = 4 x Rated current (A) / Max. current (A)2
NOTA 1
2
Quando il rapporto "Max. current / Rated current" è uguale a 1, l'errore I t è disattivato. La formula è precisa per
rapporti superiori a 3/2.
NOTA 2
Il segnale I2t del drive può essere visualizzato sull'oscilloscopio digitale selezionando I2t signal nel menu.
La soglia di protezione del segnale I2t è calcolata nel modo seguente:
Soglia di limitazione (%) = Rated current (%)2 / 50
Rated current (%) = 100 x Rated current (A) / drive current rating (A)
Il valore corrispondente RMS del drive può essere calcolato come segue:
Drive RMS current (A) = I2t signal value (%) x 501/2 x drive current rating (A) / 100
Capitolo 8 – Appendice
55
Xtrapuls CD1-a
3.2.2 - PROTEZIONE DI CORRENTE IN MODALITA' LIMITING
Quando la corrente RMS erogata dal drive raggiunge l'85 % della corrente nominale impostata il LED I²t
fault lampeggia (t1 nello schema). Quando la corrente RMS erogata scende al di sotto dell'85 % del valore
impostato il lampeggio si arresta.
Quando la corrente RMS erogata dal drive raggiunge il valore impostato, I circuiti di protezione limitano la
corrente a tale valore (t2 nello schema).
Schema della limitazione di corrente in caso di sovraccarico o blocco dell'albero motore:
Drive output current
t1 = Blinking
t2 = Current limitation
Max. current
Rated current
time
t0
t1
t2
Il tempo massimo oltre il quale intervengono il lampeggio (t1 - t0) e la limitazione (t2 - t0), sono calcolati come nel
modo Fusing.
3.3 - PROTEZIONE DA ERRORE DI CONTEGGIO ENCODER
Quando i servo-motori sono dotati di un encoder, qualsiasi errore nel conteggio impulsi, genera un errore di
posizione provocando dei movimenti incontrollati del motore che può essere pericoloso per l'operatore e la
macchina. Nel XtrapulsCD1-A permette il rilevamento di errori di conteggio impulsi e disattiva immediatamente
l'azionamento per motivi di sicurezza.
La protezione conteggio encoder verifica che il numero di impulsi, tra due successivi impulsi di marker Z (o
segnali di riferimento R) è uguale al valore di risoluzione dell'encoder del motore moltiplicato per il valore del
parametro Zero mark pitch. L'encoder, verifica anche che la frequenza di impulsi dell' encoder è inferiore a 1,5
volte la frequenza di impulsi massima. La frequenza massima è calcolata dall'azionamento in base al valore del
parametro di risoluzione encoder e il valore della velocità massima.
Il parametro di risoluzione encoder definisce il numero di impulsi dell'encoder (o periodi segnale encoder) per giro
del motore (per un motore rotativo) o per coppie di poli motore (per un motore lineare).
Il valore di Zero Mark pitch definisce il numero di giri motore (per une motore rotativo) o di coppie di poli motore
(per un motore lineare) tra due successivi impulsi di marker Z.
Per un motore rotativo, il parametro di Zero Mark pitch è generalmente pari ad 1 perché l'encoder ha un impulso
di un marker Z (o segnale di riferimento R) per ogni giro del motore.
Per un motore lineare con un solo impulso sul motore, il parametro di altezza Mark Zero deve essere impostato a
15. In questo caso la protezione conteggio encoder verifica che la posizione misurata dall'encoder ha sempre
avuto lo stesso valore quando il segnale di impulso è attivo.
Ricorda: nella configurazione dell'encoder incrementale senza HES, dopo la visualizzazione dell'errore di
conteggio, è necessario rifare la procedura di Motor Phasing.
56
Capitolo 8 – Appendice
Xtrapuls CD1-a
3.4 - PROTEZIONE DA ERRORE DI INSEGUIMENTO
MODALITA' ASSOLUTA
Soglia
dell'errore
Inseguimento
errore
Comparazione
Errore di
posizione
Valore
assoluto
Il ciclo di errore di posizione viene continuamente confrontato con il valore del parametro della soglia di errore.
Quando il suo valore è superiore a quello del parametro della soglia di errore, l'errore viene visualizzato.
MODALITA' RELATIVA
Posizione
di riferim.
Posizione
ad anello
Errore di
posizione teorico
Reale
posizione
dell'errore
+
Errore di
inseguim.
Errore di
inseguimento
Comparazione
Valore
assoluto
Il vero valore dell'errore anello di posizione viene continuamente confrontato con il valore teorico del ciclo di errore
di posizione da un modello di calcolo. Quando la differenza è eccedente al valore del parametro seguente della
sogli di errore, l'errore viene visualizzato. In questa configurazione, quando la regolazione dell' anello è fatto
senza termine di velocità (guadagno Feedforward velocità = 0) per ottenere un posizionamento basta applicare
una soglia molto bassa del parametro di inseguimento errore.
4 - USO DEGLI INGRESSI “FINECORSA”
Risposta nel tempo = 500 µs.
Durante il funzionamneto dell'azionamento in modo velocità (CI ingressi logici inattivi) o in modalità di coppia
(ingresso logico CI attivi), l'abilitazione dello switch FC limite + inibisce ogni rotazione del motore in senso orario e
l'abilitazione dello switch FC- inibisce ogni rotazione del motore in senso antiorario. Il motore è in decelerazione al
valore massimo di amplificatore di corrente al fine di ottenere il più breve tempo possibile frenata.
!
Rotazioni orarie o antiorarie dipendono dal cablaggio del sensore di retroazione (encoder o resolver),
e anche dal cablaggio del motore. Prima del montaggio e del cablaggio dei finecorsa, si raccomanda
di definire le indicazioni positive e negative del motore.
Capitolo 8 – Appendice
57
Xtrapuls CD1-a
5 - USO DELL'INGRESSO "CV0"
Risposta nel tempo = 500 µs.
Durante il funzionamento in modo velocità (logica in ingresso CI inattiva), l'attivazione dell'ingresso CV0 ferma
l'asse di rotazione (il tempo di decelerazione è in funzione del valore della accelerazione / decelerazione
impostata.
Durante il funzionamento in modalità di coppia (ingresso logico CI attivo), l'abilitazione dell'ingresso CV0 impone
un riferimento di corrente uguale a zero.
6 - USO DELLA USCITA “AOK”
In caso di guasto, l'azionamento è disattivato.
In caso di guasto (ad eccezione dell'errore di "Undervolt."), il contatto AOK del relè si apre.
L' uso del contatto del relè è descritto nel capitolo 3, sezione 3.3
Ricorda: il segnale di "Undervolt." deve essere configurato nel menù Setup nel software VISUAL DRIVE SETUP.
7 - USO DELL'INGRESSO "RESET"
Se i riferimenti di inizializzazione devono essere tenuti quando un errore memorizzato viene visualizzato
sull'azionamento o quando l'alimentatore è cut-off, ripristinare il funzionamento utilizzando il pin 13 della X2 senza
spegnere l'alimentazione ausiliaria a 24 VDC o di di backup (vedi capitolo 4).
8 - USO DELL'INGRESSO "ENABLE"
L'ingresso di abilitazione abilita l'azionamento come indicato nel diagramma temporale di seguito:
Enable input
pin 20 of X2
+24V
t
Enable/Disable
60 ms
Enable
Disable
t
9 - USO DEL SEGNALE DI USCITA "BRAKE"
Il freno del motore è disinserito quando il motore è abilitato (non ci sono errori visualizzati).
58
Capitolo 8 – Appendice
Xtrapuls CD1-a
10 - USCITE ENCODER INCREMENTALE
Due canali A e B in quadratura con un impulso Z mark per giro permettono di chiudere il ciclo posizione tramite il
NC.
A
A
t
B
t
B
t
t
CW rotation
(motor shaft front view)
CCW rotation
(motor shaft front view)
Il parametro di uscita della risoluzione encoder viene scelto in base alla seguente tabella:
Massima velocità motore (rpm)
Fino a 1600
Fino a 3200
Fino a
6400
Fino a
12800
Fino a
25000
Uscita risoluzione encoder (ppr)
Da 512 a
16384
Da 512 a
8192
Da 512 a
4096
Da 512 a
2048
Da 512 a
1024
Il valore di risoluzione definito nel parametro di risoluzione uscita encoder può essere diviso per 2, 4 o 8
selezionando il parametro di divisione Resolution Division Ratio.
Il parametro di uscita encoder “deadband” introduce una zona morta attorno alla posizione attuale al fine di evitare
oscillazioni di + / - 1 sui canali A e B. Il valore di 4.095 corrisponde a 1 / 16 della rivoluzione dell'albero motore.
Il parametro di impulso Zero (origine) permette di spostare la posizione di marcatore di impulsi sul canale Z per
quanto riguarda il resolver. Il valore di 32.767 corrisponde a un giro dell'albero motore. La larghezza di impulso
marcatore è pari a 1 / 4 di A e B.
11 - USEO DELL'INGRESSO "LIMITE DI CORRENTE"
Quando l'inversione del limite di corrente è selezionato nel menu, la coppia massima è disponibile per una
tensione di 10 Vnon c'è coppia nel motore per una tensione pari a 0 V.
La configurazione di default è l'inversione di limite di corrente non selezionato. In questo caso, non c'è limitazione
di coppia per 0 V applicata sul limite di ingresso, così la coppia massima è disponibile con ingresso non
collegato.
Capitolo 8 – Appendice
59
Xtrapuls CD1-a
12 - STRUTTURA DEL SERVOCONTROLLO
KA.s2
KF2.s
KF1.s
Posizione
di riferimento +
-
KP1
_
+
-_
+
+
KP2
KI
s
+
+
+
+
2 .. Fev
s+2. . Fev
_
Idc
KC
Velocità
Posizione
Speed Error Low Pass Filter (FEV): definisce la frequenza di taglio a-3dB del filtro di primo ordine che agisce sul
comando di corrente (IDC). Questo valore viene calcolato dall'azionamento durante la procedura di auto-tuning e
dipende dalla larghezza di banda selezionata e il tipo di filtro selezionato.
Proportional Speed Gain (KP2): definisce il guadagno proporzionale dell'azionamento che agisce sull'errore di
velocità. Il suo valore è calcolato dall'azionamento durante la procedura di auto-tuning. Può essere modificato
dall'utente, se necessario.
Integral Speed Gain (KI): definisce il guadagno integrale del regolatore che agisce sull'errore di velocità. Il suo
valore è calcolato dall'azionamento durante la procedura di auto-tuning. Può essere modificato dall'utente, se
richiesto
Damping Gain (KC): definisce il guadagno proporzionale del regolatore che agisce solo sulla velocità. Il suo valore
è calcolato dall'azionamento durante la procedura di auto-tuning. Può essere modificato dall'utente, se
necessario.
Proportional Position Gain (KP1): definisce il guadagno proporzionale del regolatore che agisce sulla errore di
posizione. Il suo valore è calcolato dall'azionamento durante la procedura di auto-tuning. Può essere modificato
dall'utente, se richiesto
Feedforward Speed 1 Gain (KF1), definisce l'ampiezza feedforward di velocità corrispondente al comando di
velocità in entrata. Questo termine permette di ridurre l'errore. Il suo valore è fissato a 1 dopo la procedura di
auto-tuning in caso di errore minimo viene visualizzato. Può essere modificato dall'utente, se necessario.
Feedforward Speed 2 Gain (KF2): definisce l'ampiezza feedforward di velocità corrispondente agli attriti viscosi.
Questo termine permette di ridurre l'effetto di attrito durante l'accelerazione del motore e le fasi di decelerazione. Il
valore di guadagno è uguale al valore del guadagno di smorzamento attrito + il termine di compensazione
dell'attrito. Il termine compensazione d'attrito può essere calcolato misurando l'attuale rapporto tra corrente e
velocità del motore a diversi valori di velocità.
Feedforward Acceleration Gain (KA): definisce l'ampiezza feedforward di accelerazione. Questo termine permette
di ridurre l'errore durante l'accelerazione del motore. Il suo valore è calcolato dall'azionamento durante la
procedura di auto-tuning in caso di errore viene visualizzato. Esso può essere modificato dall'utente, se
necessario.
La procedura di auto-tuning individua le caratteristiche del motore e del carico e calcola i guadagni. Durante la
procedura, sono disponibili diverse scelta per l'utente.
La scelta dell'intervallo di tempo per la velocità di misura (misura filtro velocità) consente di selezionare la
misurazione dei valori della velocità di risoluzione in base al valore di risoluzione del sensore di posizione: velocità
di risoluzione (rpm) = 60000 / risoluzione del sensore di posizione / intervallo di tempo (ms).
La scelta del filtro anti-resonanza è necessaria in caso di forte vibrazione nel motore / elasticità e accoppiamento
del carico.
60
Capitolo 8 – Appendice
Xtrapuls CD1-a
La scelta del filtro di massima rigidità permette di ottenere la massima rigidità sull'albero motore per quanto
riguarda i disturbi di coppia. Tuttavia, questa scelta è possibile solo non avendo alcuna risonanza sul motore /
elasticità e accoppiamento del carico.
La scelta della banda passante definisce il valore della frequenza di cut-off nella risposta di frequenza a loop
chiuso (Basso = 50 Hz, Medio = 75 Hz, Alto = 100 Hz).
La scelta del "Minimum Following Error" permette di ridurre l'errore di inseguimento durante la rotazione del
motore. In questo caso, tutti i valori di guadagno feedforward sono calcolati.
La scelta del "Minimum Position Overshoot" consente di ottenere un posizionamento del motore, senza
l'eventuale superamento della posizione di destinazione. In questo caso, tutti i valori di guadagno di feedforward
sono impostati a 0, e la posizione del motore è in ritardo per quanto riguarda il valore di riferimento di posizione
durante la rotazione del motore.
13 - INDIRIZZAMENTO DELL'AZIONAMENTO VIA RS-232
L' XtrapulsCD1-a consentire un collegamento multi-asse con un PC hos tramite il collegamento seriale RS-232
secondo il seguente schema di collegamento.
Asse 1
Asse 2
Asse 3
Il collegamento delle varie unità (PC host e azionamenti) è fatto come un anello: il segnale di trasmissione (TxD)
di ogni apparecchio è collegato al segnale di ricezione (RxD) della prossima unità. Ogni XtrapulsCD1-a dispone
di 4 micro-interruttori che consentono quindi di assegnazione degli indirizzi. L' XtrapulsCD1-a all'interno dell'anello
devono avere indirizzi diversi. Un indirizzo in configurazione multi-asse devono avere un valore compreso tra 1 e
15. L'indirizzo 0 corrisponde alla configurazione di comunicazione a singolo asse (senza indirizzamento).
Il collegamento con un azionamento con indirizzo "X" è fatto selezionando l'indirizzo dell'azionamento "X" nel
menu di configurazione VDSetup.
Capitolo 8 – Appendice
61
Xtrapuls CD1-a
14 - INDIRIZZAMENTO DELL'AZIONAMENTO VIA RS-422
L' XtrapulsCD1-a consentire un collegamento multi-asse con un PC host tramite il collegamento seriale RS-422
secondo il seguente schema di collegamento.
Asse 1
Asse 2
Asse 3
Tutti gli azionamenti hanno il connettore parallelo per il PC:
-
L'azionamento riceve I segnali tramite (RxD) sono collegati al segnale di trasmissione dei dati (TxD).
-
L'azionamento trasmette I segnali tramite (TxD) è collegato al computer per ricevere I segnali tramite
(RxD).
Ogni azionamento XtrapulsCD1-a dispone di 4 micro-interruttori che consentono quindi l'assegnazione degli
indirizzi. Gli azionamenti XtrapulsCD1-a collegati al computer devono avere indirizzi diversi. Un indirizzo in
configurazione multi-asse deve avere un valore compreso tra 1 e 15. L'indirizzo 0 corrisponde alla configurazione
di comunicazione ad asse singolo (senza indirizzamento).
Il collegamento con un azionamento con indirizzo "X" è fatto selezionando l'indirizzo dell'azionamento "X" nel
menu di configurazione VDSetup.
15 - COMPENSAZIONE DEL COGGING TORQUE
La coppia di cogging in motori brushless a magneti permanenti rotativi o la forza di cogging in motori brushless a
magneti permanenti lineari dall'interazione tra i magneti del rotore e le cave di statore. Questo disturbo è dovuto
alla differenza di riluttanza tra il rame degli avvolgimenti e il ferro dei denti dello statore. Per un motore, il cogging
può essere facilmente determinato spostando semplicemente manualmente il motore quando l'azionamento è
disattivato. La compensazione cogging (opzione) disponibile nella gamma XtrapulsCD1 permette di annullare
l'effetto cogging del motore per applicazioni specifiche che richiedono precisione e precisione di coppia o forza
superiore all'1%.
L'azionamento XtrapulsCD1 esce dalla fabbrica con l'opzione cogging di compensazione (CD1a-U/I-CT di
riferimento). Verificare la presenza della compensazione cogging (CT-CD1) nel menu VDSetup. In questo caso, il
menu cogging torque compensation può essere selezionato nel modulo loop Servo.
!
Per un motore dotato di encoder incrementale, la compensazione di coppia « cogging » è disponibile
solo se l'encoder sta fornendo un impulso di un marcatore per giro del motore.
La procedura di acquisizione di coppia “cogging” viene avviata tramite il pulsante Start. Il motore deve essere
sganciato dal suo carico e l'albero deve essere libero di muoversi durante la procedura. Prima di iniziare
l'acquisizione, accendere l'unità in modalità manuale e poi disabilitarlo (controllo Drive = Off). Quindi, avviare la
procedura di auto-tuning con le seguenti selezioni: Regolatore = PI ², filtro = max. la rigidità e la larghezza di
banda = alta. Al termine della procedura di acquisizione, il file di parametro dell'azionamento (*. PAR) può essere
caricato di nuovo in modo da recuperare le regolazioni iniziali.
L'abilitazione della funzione cogging consente alla messa in servizio del motore di compensare la coppia. Questa
funzione è salvata nella EEPROM dell'azionamento.
Il salvataggio dei dati di coppia in una funzione permette di memorizzare in un PC il valore di coppia cogging
corrispondente a un motore dopo la procedura auto-tuning (*.COG file).
62
Capitolo 8 – Appendice
Xtrapuls CD1-a
!
Per un motore dotato di encoder incrementale, la compensazione di coppia cogging è efficace solo
dopo l'individuazione del primo segnale di impulso dell'encoder.
Nota 1:
Il valore di cogging, viene controllato alla accensione dell'azionamento. Se si verificano alcuni errori (problemi di
archiviazione nella memoria dell'azionamento), errore della EEPROM viene visualizzata.La funzione di
compensazione cogging è disabilitata.
Nota 2:
Nella sostituzione di un azionamento, il file di adeguamento dei parametri (*.PAR) come per il file della coppia
(*.COG) il corrispondente motore deve essere caricato nuovamente.
Nota 3:
Quando si sostituisce il motore o il resolver, la procedura di auto-tuning deve essere eseguita nuovamente.
16 - SISTEMA DI FRENATURA
Tutte le unità XtrapulsCD1 sono dotate del sistema frenatura. Quando il motore è in decelerazione con inerzia e
l'alta velocità, l'energia meccanica di frenata si ritrova sul drive. Questa energia viene dissipata da un resistore
chiamata "resistenza di frenatura".
Al fine di evitare la dissipazione del calore all'interno del drive, la resistenza di frenatura viene montata all'esterno.
Essa deve essere montata fuori dalla portata di parti sensibili al calore e di elementi infiammabili (plastica,
passacavi, ecc.)
Per un'ottimale gestione dell'energia di frenatura in una applicazione multiasse, il bus DC (DC + e DC-) possono
essere collegati in parallelo (vedi schema al capitolo 4, sezione 1.5).
In questo caso l'alimentazione di rete deve essere collegata in parallelo al fine di bilanciare il carico di corrente
all'interno dei convertitori AC / DC.
Si consiglia di montare la resistenza di frenatura sull'azionamento col più alto valore di corrente valutabile.
Un controllo elettronico della potenza dissipata evita il sovraccarico della resistenza di frenatura. Quindi, se
l'energia riflessa alle unità montate in parallelo con bus DC è troppo alta, la tensione del bus DC salirà fino ad
attivare l'allarme overvoltage. Un secondo resistore deve poi essere montato sul secondo asse..
Capitolo 8 – Appendice
63
Xtrapuls CD1-a
17 - CODICI PER ORDINARE GLI AZIONAMENTI
Xtrapuls CD1 - a - U /
I - CT - RS
Serie CD1
Ingresso analogico +/- 10 V
230 = 230 VAC tensione di funzionamento
400 = 400 o 480 VAC tensione di funzionamento
Valori di corrente:
2.25 / 4.5 / 7.5 / 10.5 / 16.5 Arms con 230 VAC
1.8 / 2.7 / 5.1 / 7.2 / 14 / 30 / 45 / 70 / 90 Arms con 400 VAC
Opzione cogging torque
Opzione RS-422
64
Capitolo 8 – Appendice