Caratteristica dinamica.
Il trasduttore è un sistema fisico avente necessariamente un comportamento dinamico che si
evidenzia quando la sua grandezza di ingresso varia rapidamente.
Il comportamento dinamico del trasduttore, come ogni altro sistema fisico, può essere descritto nel
dominio del tempo oppure nel dominio delle frequenze.
Massima sovraelongazione
Tempo morto
Tempo di salita
Tempo di risposta
Slew-rate
Risposta in frequenza
Distorsione
Risposta nel dominio del tempo
Si suppone di fornire al trasduttore un ingresso a gradino e quindi di registrare la sua uscita Y (t).
Risposta nel dominio del tempo
Le specifiche dinamiche in questo caso possono essere fornite mediante:
•
Massima sovraelongazione, nel caso in cui l’uscita superi durante il transitorio il valore di
regime.
•
Tempo
p morto ((dead-band),
), tdb: intervallo di tempo
p che va dall’inizio del gradino
g
in ingresso
g
all’istante nel quale l’uscita è pari al 10% del valore di regime.
•
Tempo di salita (rise time), ts: tempo che impiega l’uscita a passare dal 10% al 90% del suo
valore di regime
g
y0.
•
Tempo di assestamento o Tempo di risposta (settling time), ta: tempo necessario all’uscita ad
assestarsi in un intervallo centrato nel valore di regime di ampiezza p% (5% oppure 10%)
•
Sl
Slew-rate:
t valore
l
limite
li it della
d ll variazione
i i
dell’uscita
d ll’
it nell’unità
ll’ ità di tempo.
t
Risposta nel dominio delle frequenze
La risposta in frequenza di un trasduttore si definisce attraverso i diagrammi di ampiezza e di fase
della risposta del trasduttore quando l’ingresso ha un andamento sinusoidale.
Diagrammi di ampiezza e fase della risposta in frequenza di un trasduttore ideale
Risposta nel dominio delle frequenze
Quando la sinusoide di ingresso ha una pulsazione maggiore di un valore limite, allora l’uscita
incomincia a non essere più in grado di seguire l’ingresso. Tale valore prende il nome di pulsazione di
taglio del trasduttore.
Solitamente si prende come soglia la pulsazione ω3db in corrispondenza alla quale il sistema risponde
con una uscita che è inferiore di 3 db alla risposta a pulsazione nulla:
Risposta del sensore nel dominio delle frequenze
In pratica la risposta nella banda passante non è ideale, ed è
diagramma dell’ampiezza.
caratterizzata da ondulazioni del
Risposta del sensore nel dominio delle frequenze
L’effetto di tali ondulazioni è quello di modificare anche la caratteristica statica del trasduttore, il cui
guadagno infatti si trova a dipendere dalla frequenza del segnale.
Distorsione
Un andamento non ideale del diagramma di fase può provocare la distorsione del segnale.
segnale
Si consideri un segnale composto dalla somma di due sinusoidi, una a frequenza fs, l’altra a
frequenza 3fs.
Distorsione
Se il trasduttore ha una risposta in frequenza per la quale i segnali alle due frequenze vengono
ritardati entrambi di una quantità costante, il segnale rilevato è distorto.
Distorsione
Utilizzando un trasduttore dalla caratteristica ideale il segnale a frequenza tripla viene ritardato di una
quantità tripla rispetto all’altro, di conseguenza il risultato non è distorto.
Specifiche Statistiche e Funzionali
Vita utile
Affidabilità
Costo dim.
Costo,
dim e peso
Impedenza (in/out)
Sensibilità ai fattori ambientali
•
temperatura max/min
•
tempo di warm-up
•
umidità relativa pressione max
•
presenza di gas, fumi
Vita utile del trasduttore
E' il periodo
i d di tempo
t
per il quale
l è previsto
i t che
h il ttrasduttore
d tt
operii senza modificare
difi
le
l sue
prestazioni.
Affidabilità
E’ l’attitudine del sensore a fornire specificate prestazioni sotto determinate condizioni e per un certo
periodo
L’affidabilità del trasduttore si misura statisticamente fornendo l’MTBF (Mean Time Between Failure),
cioè il periodo di tempo medio che precede un guasto del dispositivo
dispositivo.
Taratura
L‘operazione di taratura di un trasduttore corrisponde con la misurazione della grandezza di uscita per
valori noti della grandezza di ingresso al trasduttore stesso.
Per ciclo di taratura si intende una prova che copra tutto il campo di misura del trasduttore; la prova
viene suddivisa in due parti, una per valori crescenti della grandezza e l'altra per valori decrescenti.
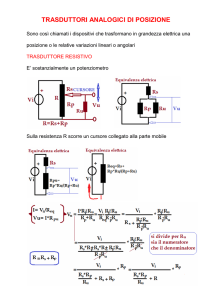
Sensori di posizione di tipo resistivo
Ii sensorii di posizione
i i
di tipo
i
resistivo
i i
sono comunemente detti
d i potenziometri
i
i e convertono la
l
grandezza da misurare (posizione lineare o angolare) in una variazione di resistenza.
Il principio di funzionamento è basato sulla variazione di resistenza in un circuito elettrico prodotta da
una variazione di geometria del sensore, determinata a sua volta dallo spostamento dell’oggetto di cui
si vuole misurare la posizione mediante un contatto strisciante.
Costruttivamente si tratta di un dispositivo in cui un cursore mobile è libero di scorrere su di un
resistore fisso, realizzato a filo avvolto o a film.
•
Nel primo caso l’elemento resistivo è costituito da un filo di leghe a base di Nichel–
Cromo e può essere applicato ad una faccia del supporto o avvolto attorno ad esso.
•
Nel secondo caso
caso, l’elemento
l elemento resistivo viene realizzato per deposito di un materiale
metallico su un supporto di plastica, oppure utilizzando un materiale ceramico conduttivo
(Cermet).
Il potenziometro è un sensore passivo, in quanto per ricavare una informazione elettrica utile occorre
inserirlo in un circuito in cui sia presente una sorgente di alimentazione ausiliaria.
Sensori di posizione di tipo resistivo
Il potenziometro è un sensore di tipo assoluto ed è disponibile sia in versione lineare che rotativa.
rotativa
Sensori di posizione di tipo resistivo
Se 0 ≤ x ≤ 1 è la variabile che indica la posizione del cursore espressa come frazione del campo di
variazione di posizione complessiva (campo di ingresso del sensore), il potenziometro si comporta
come un partitore resistivo di tensione con valori di resistenze pari a (1 - x)Rt e xRt.
La tensione d’uscita è quindi proporzionale alla tensione di alimentazione e ed alla posizione x del
cursore mobile:
Sensori di posizione di tipo resistivo
In un potenziometro a filo la tensione d’uscita è costante fintantoché il contatto strisciante è a contatto
con una spira, ma subisce un salto quando il contatto passa da una spira all’altra.
La risoluzione di un potenziometro a filo dipende dal numero e dalla spaziatura delle spire e cresce al
crescere della resistenza totale perché si ha un numero maggiore di spire.
La risoluzione di un potenziometro a film è apparentemente infinita, in realtà è limitata dalla granularità
residua del film e dalle incertezze del contatto.
Sensori di posizione di tipo resistivo
La precisione e l’accuratezza del sensore dipendono dalla stabilità della tensione di alimentazione, è
quindi necessario utilizzare un generatore che garantisca caratteristiche migliori della precisione che
si desidera ottenere nella misura.
Un valore elevato della tensione di alimentazione produce un buon rapporto segnale/rumore, tuttavia
produce anche maggior riscaldamento (autoriscaldamento) del potenziometro per effetto Joule.
Questo comporta temperature di esercizio più elevate, che possono portare alla variazione della
resistenza nominale del potenziometro ed allo scadimento della precisione .
La portata di un potenziometro può essere aumentata incrementando le dimensioni del sensore, ciò
comporta però una diminuzione della sensibilità s che dipende dalla tensione di alimentazione E0 e
dall’escursione massima del cursore l0. Si ha infatti:
All’aumentare di l0 la sensibilità diminuisce, ciò potrebbe essere compensato da un aumento di E0, ma
col rischio di ridurre la precisione a causa del riscaldamento del filamento dovuto alla maggiore
corrente.
Sensori di posizione di tipo resistivo
Il potenziometro ha una impedenza di uscita rilevante, che deve essere tenuta in conto in modo da
evitare errori di misura dovuti a problemi di interfacciamento con i circuiti elettronici di amplificazione
e condizionamento.
Infatti, detta Ri l’impedenza di ingresso di un amplificatore messo in cascata al potenziometro il
partitore resistivo modulato dalla posizione
p
p
del cursore,, si modifica a causa del parallelo
p
tra le
resistenze xRt e Ri, producendo una tensione di uscita dal dispositivo pari a:
Sensori di posizione di tipo resistivo
L’impedenza d’uscita elevata del sensore produce anche una estrema sensibilità ai disturbi
elettromagnetici, in quanto il tratto di conduttore tra il sensore e il circuito di amplificazione funziona
da “antenna” per i disturbi elettromagnetici ambientali.
Il potenziometro è un dispositivo economico ma poco affidabile a causa del contatto strisciante che
può deteriorarsi e risentire di vibrazioni e shock meccanici.
E` oggi molto utilizzato in applicazioni automobilistiche mentre è scarsamente utilizzato nelle
macchine automatiche per misurare posizioni di parti importanti o critiche.
Sensori di posizione di tipo magnetoresistivo
Per eliminare i problemi causati dalla presenza dei contatti striscianti sono stati sviluppati potenziometri
‘contactless’ che sfruttano l’effetto magnetoresistivo, cioè il fenomeno per cui la resistività di alcuni
materiali ferromagnetici policristallini varia quando tali materiali percorsi da corrente sono investiti da un
campo magnetico
ti
v.
Applicando un piccolo campo magnetico H ortogonale alla direzione della corrente si ha una variazione
quasi lineare della resistività al variare dell’intensità del campo magnetico.
Sensori di posizione di tipo magnetoresistivo
Se la posizione del magnete è simmetrica rispetto alle due sezioni dell’avvolgimento, la tensione tra i
terminali 1 e 2 è metà della tensione tra 1 e 3 (tensione di alimentazione). A seconda che il magnete si
p
verso una delle due sezioni viene generato
g
un aumento od una diminuzione della tensione tra i
sposti
terminali 1 e 2.
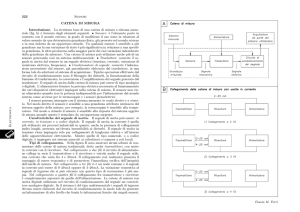
Sensori di posizione di tipo capacitivo
Un sensore capacitivo è un sensore assoluto di posizione (lineare o angolare) che sfrutta la variazione
di capacità tra due elettrodi piani.
Pur essendo simile in termini di funzionalità ed applicazioni ai potenziometri, ha il vantaggio di non
possedere contatti striscianti, ciò migliora notevolmente la precisione e l’affidabilità del sensore.
piane p
parallele,, la capacità
p
vale:
Per un condensatore ad elettrodi a facce p
dove ε è la costante dielettrica, S la superficie affacciata dei due elettrodi e d la distanza tra i due
elettrodi.
Il sensore capacitivo converte la variazione della grandezza da misurare (posizione lineare o angolare)
in una variazione di capacità facendo variare:
• la distanza tra gli elettrodi.
• la posizione del dielettrico rispetto agli elettrodi
• la superficie
s perficie affacciata dei d
due
e elettrodi
elettrodi.
Sensori di posizione di tipo capacitivo
La capacità di un sensore capacitivo in cui sia variabile la distanza tra gli elettrodi vale idealmente:
ove d0 è la distanza iniziale tra gli elettrodi ed x lo spostamento dalla posizione iniziale.
iniziale
Questo approccio non è mai utilizzato in pratica per la realizzazione di sensori di posizione (mentre è
utilizzato p
per la realizzazione di sensori di p
pressione)) p
perché la legge
gg che lega
g lo spostamento
p
alla
variazione di capacità non è lineare.
Sensori di posizione di tipo capacitivo
La capacità di un sensore capacitivo in cui sia variabile la posizione del dielettrico vale idealmente:
ove:
La capacità diminuisce linearmente con lo spostamento.
La sensibilità del sensore vale:
Sensori di posizione di tipo capacitivo
Se i due elettrodi a facce piane sono sfalsati di un angolo ϑ, la superfice affacciata vale:
La capacità di un condensatore variabile di tipo rotativo vale idealmente:
essendo:
Sensori di posizione di tipo capacitivo
La capacità diminuisce linearmente con lo spostamento.
La sensibilità del sensore vale:
Il campo di misura tipico di un Rotary Capacitive Displacement Transducer (RCDT) è inferiore
all’angolo giro (circa 300°). Al di fuori del campo di misura nominale la misura non è attendibile e varia
non linearmente.
linearmente
Sensori di posizione di tipo capacitivo
Le variazioni di capacità possono essere trasformate in segnali di tensione con un circuito a ponte.
La tensione ΔV sul ponte vale:
⎛
C
R
⎞
X
1
⎟⎟ V
ΔV = ⎜⎜
−
C
C
R
+
+
X
1 R2 ⎠
⎝ 1
Nelle condizioni iniziali (CX=C0) |ΔV| è nulla se:
C0 = C1
R1
R2
scegliendo C1 , R2 ed R1 in modo da soddisfare la precedente relazione, ed inoltre C1 >> Cx si ha:
⎛ C − KΔ θ
R1 ⎞
KΔ θ
⎟⎟ V ≈
ΔV = ⎜⎜ 0
V
−
R1 + R2 ⎠
C1
⎝ C1 + C X
Sensori di posizione di tipo capacitivo
Le variazioni di capacità possono essere trasformate in segnali di tensione anche con un oscillatore a
frequenza variabile.
Il sensore capacitivo è inserito in un circuito oscillante e ne determina la frequenza di risonanza.
Per piccole variazioni di capacità, sviluppando in serie, si ha:
essendo:
Il circuito PLL genera una tensione continua proporzionale alla frequenza del segnale d’ingresso
d ingresso.
In alternativa utilizzando un contatore d’impulsi è possibile avere un dato numerico.