Sistemi di supporto alla vita
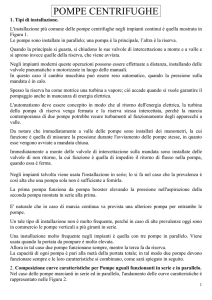
1. Introduzione
I sistemi di supporto alla vita sono anche chiamati organi artificiali. Questi si interfacciano con il
sistema fisiologico e richiedono quindi una cura particolare nella scelta dei materiali e della
morfologia, nelle interazioni (dispositivi paracorporei), nei tipi di accesso, nel rispetto delle
dimensioni anatomiche e nella biocompatibilità morfologica e funzionale (dispositivi impiantabili).
I dispositivi si dividono, in base alla loro collocazione, in:
•
paracorporei, dispositivi che giacciono all’interno dell’organismo, ma che comunicano con
l’esterno (ventricolo di assistenza);
•
extracorporei, dispositivi che non sono impiantabili (CEC);
•
impiantabili, dispositivi che restano all’interno del corpo (pace maker).
A loro volta esiste una classificazione in base al tempo di impiego:
•
temporanei (contropulsatore);
•
permanenti (pacemaker);
•
intermittenti (dialisi);
ovviamente i dispositivi impiantabili non possono essere intermittenti.
Gli obiettivi primari da perseguire nella progettazione di uno di questi dispositivi sono:
•
biocompatibilità;
o affidabilità,
o dimensioni,
•
economicità;
•
recupero sociale del paziente.
Rispetto all’affidabilità e alle dimensioni, passa in secondo piano il problema economico che, però,
non può essere completamente dimenticato in fase di progettazione: un dispositivo funzionante, ma
eccessivamente costoso non attirerebbe l’interesse dell’industria e richiederebbe uno spostamento di
risorse economiche a discapito di tecnologie piu consolidate nel tempo. Le dimensioni dei sistemi
artificiali impiantabili devono rispettare la compatibilità anatomica (volume a disposizione), mentre
quelli extracorporei devono possedere volumi tali da non compromettere le funzioni fisiologiche
(un eccessivo volume di sangue prelevato porta al collasso e alla morte). In generale, la
biocompatibilità non è problema che riguarda solo i materiali, ma anche la forma e le dimensioni. Il
materiale “biocompatibile” vero e proprio, oggigiorno, non esiste; di contro si sono sviluppati
tecnologie di rivestimento superficiali e particolari finiture che evitano una risposta infiammatoria
da parte dell’organismo. In sede di progettazione è utile valutare i tempi di impiego e il fine del
dispositivo in modo da poter trovare il giusto compromesso tra costi e tecnologie impiegate nella
costruzione. Ad esempio, se un device ad uso intermittente, come un dializzatore, avesse i tubi
rivestiti di carbonio turbostratico, il costo di una dialisi sarebbe accessibile solo a pochi facoltosi;
basta invece che queste cannule siano in PVC per evitare fenomeni indesiderati per le 3-4 ore di
trattamento previste. Nello stesso modo è inutile usare materiali e tecnologie che garantiscano una
durata del dispositivo di alcuni anni anche se l’impiego previsto è solo di qualche ora dal momento
che ciò rappresenterebbe soltanto uno spreco di risorse senza un reale guadagno in termini
applicativi.
Problematiche più specifiche si incontrano nel caso di organi artificiali che si interfacciano con il
sangue. Dal momento che non esiste un materiale completamente emocompatibile, risulta
necessario somministrare al paziente degli anticoagulanti (eparina) o antiaggreganti con tutti gli
effetti collaterali conseguenti. Ad esempio, l’eparina è tossica, quindi risulta improponibile
somministrarla per tutta la durata di un dispositivo impiantabile permanentemente (si usano
antiaggreganti, meno forti); inoltre, un paziente non può risultare completamente scoperto della
funzione coagulante delle piastrine a causa di un eccessivo rischio emorragico in caso di lesione
accidentale.
Al di là della scelta del materiale, la biocompatibilità (fig.1) deve coprire vari ambiti del progetto:
•
le forme e le dimensioni devono essere simili all’organo;
•
il disegno del dispositivo deve garantire al sangue un percorso omogeneo in modo da
prevenire l’emolisi. La maggior causa di emolisi è dovuta dall’azione meccanica legata alla
geometria del sistema;
•
non ci devono essere zone di ristagno per il sangue;
•
non devono esistere punti che inducano accelerazioni;
•
bisogna evitare la presenza di variazioni brusche di sezione.
Un altro caso è rappresentato dai dispositivi per respirazione. Qui l’obiettivo è limitare le resistenze
di inspirazione e espirazione come avviene per i pazienti in terapia intensiva e per quelli che invece
usano permanentemente tubicini nel naso. A volte le metodiche di ventilazione con il gas possono
essere nocive; per questo motivo si usano metodologie a ventilazione liquida: la maggiore
biocompatibilità viene garantita, in questo caso, da un sistema apparentemente antifisiologico.
biocompatibilità
fisiologia
durata
fluidodinamica
interfaccia
materiali
Tipo di
impianto
Figura 1: aspetti della biocompatibilità.
L’affidabilità consiste nel garantire la durata del dispositivo soprattutto per funzionamento di ogni
elemento dell’impianto durante il periodo previsto; serve affidabilità nel tempo e nella prestazione.
Strettamente connesso all’affidabilità è il problema della regolabilità del dispositivo che deve essere
in grado di adattarsi a diverse situazione fisiologiche grazie alla possibilità di un controllo esterno o
di uno automatico. Esempio tipico è la pompa per il cuore che deve garantire il flusso sia a riposo,
sia durante la camminata o mentre si corre.
1.1 Supporti per il sistema cardiocircolatorio
P
Q
t
t
Figura 2: confronto di portata e di pressione erogate da una pompa contnua rispetto a quelle fisiologiche.
Questi sistemi sono legati al ripristino della funzione cardiaca (contropulsatori e tutti gli altri sistemi
pompanti sia a livello extracorporeo sia a quello intracorporeo). Il sistema più completo è la CEC;
questa garantisce una portata di sangue costante con una pressione compresa tra 70 e 90 mmHg.
Dall’immagine (fig.2) si può vedere come la curva fisiologica (linea tratteggiata) si discosti molto
da quella del dispositivo (tratto pieno) sia in termini di portata (a sinistra) sia in quelli di pressione
(a destra); questo comporta poca biocompatibilità che può provocare scompensi ematici fino
all’edema. Esistono inoltre anche problemi di emolisi provocati dalla ridotta sezione di accesso che
comporta ulteriori scompensi. Il vantaggio risiede nel fatto che la CEC è utilizzata nel range delle 2
ore (tempo di operazione) e, in questo ambito, è ampiamente tollerata dall’organismo. Tempi di
impieghi più lunghi potrebbero causare danni o, in alcuni casi, fenomeni di adattamento fisiologico
anche se è utile non dimenticare che è sempre il sistema a doversi adattare all’organismo e non
viceversa.
I sistemi di supporto alla vita che interagiscono con il sangue sono costituiti da sottoelementi che, in
ciascuno strumento, si interfacciano in maniera differente. Questi sono:
•
pompe
•
tuberia
•
scambiatori di massa
•
scambiatori di calore
•
filtri.
2. Le pompe continue
La funzione di una pompa è quella di fornire una certa pressione ad un liquido in modo da farlo
circolare all’interno di un circuito. Nel caso del cuore, che rappresenta il target progettuale di queste
pompe, la pressione fornita serve per far arrivare il sangue nei siti di scambio metabolico. Le pompe
usate per bypassare la funzione cardiaca possono essere:
•
continue
o a pistone
o rotativi
•
pulsatili
o organi meccanici
o pneumatici.
Un'altra divisione riguarda l’interfaccia con il sangue; esistono pompe con elementi mobili di due
tipi:
•
a diretto contatto con il sangue
•
a contatto indiretto mediato da un’interfaccia con il sangue.
Le caratteristiche fondamentali di una pompa riguardano la non emoliticità, la riduzione dei volumi
di ingombro esterni e la limitazione per quelli di riempimento interni. L’emolisi è uno dei fattori più
gravi da evitare, in quanto l’emoglobina libera è tossica sopra certe quantità; la riduzione dei volumi
esterni consente una maggiore impiantabilità, mentre volumi di riempimento non eccessivi evitano
il collasso del paziente per la brusca diminuzione di pressione indotta dal prelievo del volume
iniziale.
Ovviamente, per il funzionamento di una pompa serve conoscere la portata da erogare che è
funzione delle caratteristiche del paziente. In particolare si calcola la superficie corporea in base al
peso, all’altezza e al sesso; sapendo sperimentalmente che il cardiac index vale 2,4-2,5 l/(min m2) si
risale facilmente alla portata da erogare.
2.1 Sistemi a pistone
Questi sistemi rientrano nelle pompe che erogano una portata continua. A ragion del vero, è
facilmente intuibile che un pistone di lunghezza finita non può, per sua natura, continuare ad
erogare flusso per un tempo infinito in maniera costante, in quanto necessita di un certo periodo di
ricarica. Il termine “continua” riferito alla portata serve per distinguere questi sistemi da quelli
“pulsatili”, concetto che non va frainteso con quello di “intermittenti”. La differenza risiede nella
forma d’onda della portata: nel caso di sistemi continui, Q si mantiene costante durante l’erogazione
e il trise è estremamente ridotto, mentre nei sistemi pulsatili la forma d’onda è parabolica. Questa
differenza sussiste anche se tra un’onda e la sua successiva trascorre un certo tempo T (di ricarico
nel caso del pistone) che genera il fenomeno dell’intermittenza (fig. 3).
Un modo per evitare l’intermittenza intrinseca dei sistemi a pistone, consiste nel porre due pompe
sincronizzate in parallelo.
Questi due sistemi sono entrambi intermittenti, ma quello di
sinistra è a portata continua, quello di destra è pulsatile
Q
Q
t
t
Figura 3: confronto tra portata "continua", "intermittente" e "pulsatile".
2.3 Pompe rotative
Le pompe rotative si basano sulla rotazione di parti meccaniche a contatto diretto o indiretto con il
sangue. Il cuore del sistema è il motore elettrico che muove le parti meccaniche preposte alla spinta
del liquido. Esistono due tipi di pompe rotative:
•
volumetriche
•
turbopompe.
Le pompe volumetriche sono quelle maggiormente impiegate in vari settori biomedicali in quanto
garantiscono una portata di fluido e un rendimento costante al variare delle condizioni di carico; in
questo modo l’energia fornita al liquido è fissa e facilmente regolabile. Tuttavia le soluzioni
tecniche per una pompa volumetrica sono molteplici, ma solo alcune possono essere sfruttate nel
campo biomedicale. Ad esempio, i sistemi ad ingranaggio, che spingono il fluido attraverso una
luce di aspirazione ed una di mandata, non possono essere impiegati per il sangue a causa
del’eccessivo effetto emolitico provocato dall’interferenza delle ruote dentate (vengono impiegate
con altri liquidi, come, ad esempio, i fluidi dializzanti) . Per l’impiego ematico, risultano migliori le
viti senza fine a diretto contatto con il sangue, anche se la soluzione usata maggiormente,
soprattutto nella CEC, è la pompa roller. Questa è costituita da un piano con bordi rialzati rigidi in
grado di ancorare saldamente una parte del tubo flessibile che costituisce la linea di collegamento
con il paziente. Sul piano della pompa, collegate ad un motore elettrico, sono disposte alcune palette
meccaniche alla cui estremità vi sono dei rulli. Dimensionando accuratamente i bracci delle palette,
durante la rotazione i rulli schiacciano il tubo flessibile creando un moto di avanzamento continuo
del liquido senza avere un contatto diretto con esso. La pompa genera una certa differenza di
pressione tra il liquido in uscita e quello in entrata, che prende il nome di prevalenza:
ΔH=Pout-Pin
La portata della pompa dipende dalla sua prevalenza e dal carico applicato; entro un certo range di
carico applicato la pompa eroga sempre la stessa portata variando il punto di lavoro a fronte di una
differente spesa energetica. Quantitativamente Q è pari a:
Q=ngiri Vintrapp Nrulli ζ
Dove ζ rappresenta il rendimento volumetrico.
Il discorso di idealità, riferito alla portata costante al variare del carico, deve subire una modifica
concettuale se si pensa all’effetto della pressione a valle quando uno dei rulli abbandona la sede ed
il successivo si fa totalmente carico del lavoro di spinta del fluido. Ovviamente la Pout agisce solo
sul rullo rimasto generando un riflusso che discosta il funzionamento dall’idealità. Inoltre, bisogna
pensare che l’effetto di schiacciamento totale del tubo genera inevitabilmente emolisi; per evitare il
fenomeno si costruiscono bracci meccanici telescopici che lasciano un doppio lume di passaggio
all’estremità della sezione di tubo compressa, in modo da costituire una via di fuga per i globuli
rossi. Queste minuscole sezioni di passaggio sono origine di vie di flusso retrogrado e costituiscono
una non-idealità (fig. 4).
Vista
dall’alto
Vista in
sezione
Condizione di non
idealità con fori di
riflusso per
evitare l’emolisi
Figura 4: pompe roller, principio di funzionamento e non-idealità.
In questo tipo di pompe è facile capire come si possa generare una certa intermittenza del flusso,
senza, per questo, creare pulsatilità. Le pompe roller sono impiegate per lo più nelle applicazioni
dove si richiede di inviare il sangue a degli scambiatori di massa dopo averlo prelevato dal paziente
attraverso accessi vascolari debitamente creati. A causa del loro ingombro, non possono essere
impiantabili, ma grazie alla loro facilità di regolazione (attraverso il numero di giri) vengono
impiegati nel bypassare parzialmente o completamente il cuore durante gli interventi di
cardiochirurgia. Altri tipi di pompe che si discostano dal concetto di “pompa volumetrica” non
garantiscono una portata costante e necessitano quindi di flussimetri per la misura del flusso
erogato. Questo comporta svantaggi in termini di ingombro e di costo rispetto alle pompe roller.
2.3 Pompe a vite
Le pompe volumetriche, sebbene garantiscano sicurezza, affidabilità e controllo dell’eventuale
cavitazione
mandata
aspirazione
(tubi
trasparenti),
presentano un basso rendimento
pari a 0,5 (dovuto alle non
idealità, come, ad esempio, la
Viti con
filettature
opposte
motore
Figura 5: pompe a vite.
presenza di meati) e non risultano
impiantabili.
Si ricorre per questo ad altre
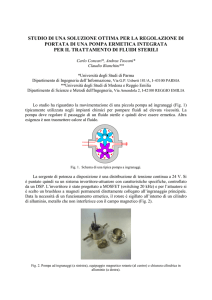
pompe, sempre di tipo volumetrico-rotative, come quelle a vite senza fine. Queste sono costituite da
una vite centrale posta in rotazione da un motore elettrico che ne trascina con sé altre due,
dimensionalmente uguali e con filettatura opposta, disposte parallelamente a quella principale e
inserite all’interno di un contenitore (fig. 5). Il moto rotativo aspira il sangue dall’esterno,
imponendogli un moto a spirale, e lo spinge fino alla camera di mandata. Al contrario di quanto si
possa pensare (anche in analogia per quanto avviene nelle pompe ad ingranaggi), il moto delle viti
non genera emolisi perché il sangue non viene compresso tra le due filettature poste a contatto, ma
ne segue solo il moto avvolgente. I limiti di questi sistemi sono legati all’elevato volume di priming
richiesto per erogare 5-6 litri di fluido al minuto (dato fisiologico) e alle eventuali perdite di sangue
sulla superficie dei componenti metallici che, oltre a rappresentare un problema fisiologico,
potrebbero generare anche alterazioni del funzionamento meccanico dovute al sovradeposito di
materiale che ostacola il corretto contatto tra le viti.
2.4 Turbopompe
Le turbopompe o pompe centrifughe (fig. 6) risultano radicalmente diverse dalle pompe
volumetriche sia per aspetti meccanici sia per quelli concettuali. Gli elementi distintivi di questo
tipo di pompe sono:
•
il rotore;
•
lo statore.
Il rotore è l’elemento che, attraverso un motore elettrico, è
Direzione del flusso
rotore
u=ωr
v
w
posto in moto grazie ad un albero di collegamento o ad una
sospensione magnetica. La possibilità di avere la sospensione
magnetica consente di avvicinare la pompa al paziente
eliminando i tubi di connessione per il sangue e sostituendo
l’albero di collegamento motore-rotore con un filo elettrico.
Lo statore è invece la cassa rigida comprendente i cuscinetti e
statore
Figura 6: pompa centrifuga e triangolo
delle velocità.
il diffusore.
Il funzionamento si basa sulla forza di aspirazione della pompa
che aumenta la quantità di moto del fluido; successivamente
questo entra nel diffusore (elemento a sezione variabile divergente) rallentando la sua velocità e
aumentando la pressione (principio di Bernoulli). Come si può vedere dall’immagine la curva
caratteristica delle pompe centrifughe è nettamente diversa da quelle volumetriche viste in
precedenza (che erogano sempre la stessa portata indipendentemente dal carico) (fig. 7). Nel caso di
pompe centrifughe, un aumento di resistenza a valle fa sensibilmente variare la portata per un egual
numero di giri del motore. Le elevatissime velocità di rotazione (12000-18000 rpm per le
centrifughe; 50-80 rpm per le volumetriche, con un tubo da 3/8 di pollice e una portata di 5-6 l) non
incrementano in alcun modo gli effetti emolitici che dipendono esclusivamente da urti e sforzi di
taglio innescati dalle accelerazioni e dal percorso seguito dal sangue in movimento. È quindi
importante che, soprattutto nelle pompe di piccole
dimensioni che presentano le velocità più elevate
R
ΔH
per il mantenimento dell’asse fisso, le palettature
Caratteristica
delle pompe
volumetriche
divergenti, poste sul rotore per imprimere pressione
al
fluido,
siano
disegnate
secondo
principi
fluidodinamici che minimizzino gli urti fra
particelle in ogni punto della rotazione.
Caratteristica
delle
turbopompe
Q’ Q
A tale scopo si calcolano i triangoli delle velocità
in funzione della portata di progetto. Componendo
Q
Figura 7: curva caratteristica della pompa centrifuga
posta a confronto con quella della pompa volumetrica.
in ogni punto la velocità V di ingresso del fluido
con quella di rotazione delle pale ωr, si ottiene un
vettore
velocità
W
che,
senza
palettatura,
modificherebbe la sua direzione al variare della posizione della particella di fluido rispetto al centro
del rotore. La forma delle pale (che partono dal centro e arrivano alla periferia) deve garantire in
ogni punto la minima variazione direzionale del vettore W calcolato rispetto al bordo della paletta
stessa; in questo modo si è sicuri di evitare turbolenze e urti delle particelle del sangue. Il profilo di
queste palette assomiglia a quello di un’ala di un aereo e la loro disposizione ottimale risulta essere
divergente e svergolata a partire dal centro (punto di ingresso del fluido). Il calcolo viene effettuato
partendo da un numero di palette imposto e da una portata fissa di ingresso (funzione del diametro
del tubo) che vengono impiegate nel calcolo del lavoro euleriano (funzione della velocità) in
maniera iterativa; dopo un certo numero di cicli, si converge ad un risultato dal quale si ottiene la
forma ideale della paletta.
2.5 Ultimi cenni sulle turbopompe
Nel progetto di una pompa centrifuga i dati di partenza sono le velocità di ingresso e di uscita in
funzione del numero di giri del rotore; in base a questi si calcola la velocità di trascinamento del
sangue tra le palette mediante operazioni iterative. Il risultato finale deve garantire un’equivalenza
di portata tra quella in ingresso e quella in uscita e deve risultare pari alla somma della portata di
sangue di ogni paletta.
La forma svergolata della paletta è ottimale per una certa portata fissa o variabile, entro un ristretto
range di circa 1l/min. Il valore massimo di variazione di portata rappresenta ovviamente un limite
per questo tipo di pompe in quanto non risultano in grado di adattarsi alle ampie variazioni richieste
dall’organismo in condizioni fisiologiche. Anche la soluzione teorica di rendere le palette mobili, in
modo tale che il profilo possa adattarsi alle variazioni di portata, non può progettualmente essere
presa in considerazione dal momento che la creazione di cerniere genererebbe delle discontinuità
geometriche e quindi dei punti di possibile aggregazione sanguigna. Bisogna quindi limitare
l’impiego clinico delle pompe centrifughe (anche quelle impiantabili) perchè risultano valide
soltanto per pazienti in condizioni fisiologiche stabili (ad esempio quelli sedati), ovvero soggetti che
non richiedono continui adattamenti di portata. È anche necessario ridurre il tempo di impiego dal
momento che questi sistemi generano fenomeni emolitici quando operano fuori dal loro range di
portata progettale.
Per pazienti operati a livello toracico, ad esempio, si prevede un periodo di svezzamento della
respirazione e uno di riabilitazione durante i quali, le resistenze e le compliance dell’organismo
variano e, di conseguenza, serve un continuo adattamento del ritmo cardiaco. In questi casi le
pompe centrifughe impiantabili rappresentano solamente un “accomodamento” dal punto di vista
funzionale. In aggiunta al problema della flessibilità di portata, per questi sistemi impiantabili
sorgono anche problematiche nuove rispetto alle pompe centrifughe usate nella CEC:
miniaturizzazione, affidabilità (usura dovuta all’elevata velocità di rotazione) e approvvigionamento
dell’energia.
Reperire l’energia necessaria, per mettere in moto la girante di una pompa centrifuga o di una
qualsiasi pompa assiale per recovery, richiede un accesso diretto trans-corporeo mediante un filo
elettrico collegato ad una batteria esterna. Il problema dell’alimentazione è molto discusso dal
momento che riguarda tutti i pazienti che utilizzano sistemi di recovery (maggiormente in USA
rispetta all’UE) e quelli di bridge al trapianto (molto usati anche in UE). I pazienti in attesa di un
cuore da donatore rimangono infatti nelle liste d’attesa anche 2 o 3 anni durante i quali la loro
funzione cardiaca necessita di un supporto. Un periodo di tempo cosi lungo inficia l’ipotesi di un
ricovero permanente con assistenza mediante pompe pneumatiche e vincola la scelta
all’applicazione di pompe assiali con batteria esterna in modo da poter dimettere il paziente e
garantirgli una vita sociale agevole.
2.6 Pompe assiali
Nell’anno 2004 il volume di sistemi di assistenza ventricolare usati come ponte al trapianto è pari a
circa 250 esemplari all’anno in Europa. Il loro costo si aggira attorno ai 50000 euro. Questi dati
sono ovviamente medi e sono riferiti sia alle pompe centrifughe impiantabili (rare) sia a quelle
assiali (più usate).
I modelli di pompe più usati in campo di assistenza ventricolare sono quelle assiali a vite. Ne
esistono numerosi design, ma tutte si basano sull’effetto di aspirazione generato da una vite rotante
all’interno di un cilindretto. Il modello Debakey (dal nome del fisiologo che ha prestato la sua
esperienza nella realizzazione) è formata da un cilindretto lungo 5 cm e con diametro pari a 2 cm
per un peso complessivo di 115g. E’ importante notare che la maggiore difficoltà progettuale
consiste nel disegno della filettatura della vite che segue le medesime regole progettistiche delle
palette della pompa centrifuga: lo sviluppo dei filetti che minimizzi gli urti delle particelle del
sangue durante l’aspirazione rende minimo l’effetto emolitico. Sullo statore delle pompe assiali
sono presenti anche delle contro-filettature che trasformano il moto elicoidale del fluido generato
dalla vite in moto assiale.
Queste pompe non necessitano di valvole per garantire l’unidirezionalità del fluido e lavorano in
parallelo con il ventricolo assistito (parzialmente attivo). Il ventricolo malato conserva parte della
capacità sistolica, mentre la pompa interviene recuperando il sangue rimasto a livello apicale a
causa della sistole parziale ed immettendolo di continuo nell’aorta. Per l’impianto di questi sistemi
bastano quindi due sole anastomosi: una all’apice del ventricolo e una in aorta dove convive parte di
flusso anterogrado e retrogrado (fig. 8).
Aorta e seconda
anastomosi
L’assistenza ventricolare è generalmente applicata al
ventricolo sinistro, mentre risulta più rara l’assistenza
destra. A ragion del vero, è da sottolineare il fatto che
un cattivo funzionamento del ventricolo destro è
connessione
Pompa e
prima
anastomosi
dovuto di solito ad uno spostamento del setto causato
dall’inefficienza di quello sinistro; in questo caso il
recupero del ventricolo sinistro garantisce anche la
Figura 8: collegamenti delle pompe assiali con
apice ventricolare sinistra e aorta.
ripresa del destro. Nei casi in cui si necessita di una
doppia assistenza si impiegano pompe differenti per i
due ventricoli (spesso una centrifuga per il destro e una pulsatile per il sinistro). Come si vedrà nel
capitolo dedicato alle pompe pulsatili, a causa del loro ingombro sterico e del rumore generato dalle
valvole e dal colpo del solenoide non è possibile impiantarne due nello stesso paziente.
Le pompe assiali hanno l’alimentazione elettrica esterna che viene fornita all’attuatore mediante un
filo passante nella cute del paziente (problemi di infezione). Un’alternativa a questo sistema è
rappresentato dall’accoppiamento induttivo con un alimentatore esterno posto parallelamente
all’attuatore interno. In questo caso si avrebbe un trasferimento di energia attraverso la cute senza
fori passanti; alcuni esprimenti hanno dimostrato che non vi è necrosi tessutale nella zona di
impianto anche se l’unica applicazione clinica tentata ha dato risultati opposti facendo attualmente
abbandonare l’idea. In futuro si aspettano altre prove di questa tecnica in modo da ovviare al
problema delle infezioni dovute al foro transcutaneo del filo elettrico, migliorando, di conseguenza,
anche la vita del paziente, oggi costretto ad una continua disinfezione. Bisogna inoltre ricordare che
i soggetti impiantati vengono continuamente trattati con antiaggreganti (non sono eparinizzati) per
evitare il problema della formazione di trombi.
Come avviene il trapianto?
Il meccanismo della destinazione degli organi da trapiantare si fonda sulla presenza di
due centri italiani preposti alla gestione delle liste di attesa. Ciascuno dei due centri
possiede ed aggiorna continuamente le liste dei pazienti in attesa di un organo da
trapiantare e li ordina in un database in funzione dell’età, del tempo di malattia, delle
condizioni, dell’area geografica, delle caratteristiche immunologiche e di quelle
biometriche.
I pazienti in attesa di trapianto in condizioni fisiologiche estremamente gravi non
entrano immediatamente in lista, ma si prevede per questi un iter terapeutico
preliminare con l’obbiettivo di migliorare le funzionalità epatiche, polmonari e renali
(durante questo periodo di recupero si utilizzano i sistemi di ponte al trapianto). Una
volta raggiunte le condizioni accettabili il paziente entra nei primi posti della lista in
modo tale da minimizzare il tempo di impiego del dispositivo di assistenza e da
limitare il consumo di risorse ospedaliere.
Una volta giunta la disponibilità di un organo, il centro seleziona subito il paziente più
adatto e invia immediatamente l’equipe medica preposta al trapianto a prelevare
l’organo. È importante che i medici che prelevano e che impiantano l’organo siano gli
stessi dal momento che ogni equipe segue procedure proprie e conosce le tecniche di
impianto usate. Nel caso di trapianto cardiaco di solito il paziente ricevente conserva
la propria cuffia dell’atrio sinistro per evitare di anastomizzare le polmonari. Per
l’atrio destro si lascia invece libera scelta al chirurgo. Il fascio di Hiss viene tagliato al
momento dell’impianto per cui la variazione di frequenza avviene grazie alla
barocezione, alla chemocezione e alla legge di Starling.
3. Assistenza ventricolare pulsatile
I sistemi di assistenza ventricolare pulsatili nascono per ovviare ai problemi fisiologici connessi
all’irrorazione dei distretti corporei con flusso sanguigno continuo. Tale flusso è di fatto superiore
alla media tra la pressione fisiologica sistolica e quella diastolica in modo da garantire l’irrorazione
dei distretti capillari più distanti dal cuore. Questo causa un aumento medio della pressione
idraulica che non viene più sufficientemente bilanciata da quella di richiamo. Da questo fenomeno
consegue un flusso medio di liquidi sbilanciato tra il distretto sanguigno e quello interstiziale che
provoca un fenomeno edematoso simile a quello che avviene per i pazienti in CEC, per i quali è
prevista la somministrazione di farmaci per arginare il fenomeno. Dalla formula sotto riportata si
può notare che se il valore di P aumenta oltre quello di π (vale a dire che si lavora ad una P media
continua superiore ai 100mmHg) si innesca un flusso di liquido in uscita dai vasi sanguigni ed,
inoltre, alcuni distretti capillari rimangono continuamente pervi e perfusi mentre altri si chiudono
definitamene a causa dell’assenza della pulsatilità.
J=k(ΔP-Δπ)
Per ovviare a questo fenomeno si costruiscono pompe idrauliche pulsatili di due tipi:
•
Pneumetiche (o idrauliche)
•
elettromeccaniche.
Per le prime si prevede una grossa pompa al limite dell’impiantabilità che genera pulsatilità grazie
all’immissione di aria compressa mediante un tubo transcutaneo di 6-7 mm di diametro. Questo
collegamento con l’esterno rappresenta un grosso ostacolo per il rischio di infezione, ma fornisce il
vantaggio di essere in grado di gestire la funzione d’onda del flusso modulando ΔP/ΔT dell’aria
compressa. Il sistema è complessivamente ingombrante sia per quanto riguarda la parte interna (3-4
Kg) che deve essere inserita in una sacca addominale preparata ad hoc dal chirurgo sia per quanto
concerne il compressore esterno che deve essere trasportato dal paziente in uno zaino.
Il sistema elettromeccanico garantisce invece un accesso transcutaneo molto più sicuro dal
momento che necessita solo del filo elettrico per attuare il movimento del solenoide, ma la forma
d’onda del flusso prodotto è a scalino e, per questo, più distante dall’idealità (fig. 9).
Pompa
elettromeccanica
Pompa
pneumatica
Figura 9: confronto tra l'erogazione di portata di una pompa elettromeccanica con
quella pneumatica.
Per entrambi i sistemi sono previste due anastomosi di collegamento: una a livello dell’apice
ventricolare e l’altra direttamente in aorta. La prima avviene mediante la foratura del ventricolo con
il bisturi, seguita dall’inserimento di parte del tubo di dacron e conclusa con la sutura finale
mediante un collarino di tessuto. La seconda si realizza direttamente tra il vaso sanguigno e il
condotto di dacron tagliato a becco di fluato. La portata viene regolata attraverso il controllo della
frequenza di pulsazione.
L’incannulazione avviene a livello apicale solo nel caso di ventricolo sinistro, mentre nel destro si
incannula l’atrio perché risulta più facile rimettere il sangue nella polmonare dal momento che
l’arteria ed il cuore sono molto vicini.
Il meccanismo di pompaggio in un ventricolo pneumatico si basa sull’immissione di aria compressa
in un intercapedine formata tra la struttura rigida della pompa e la sacca flessibile contenete il
sangue. La sistole e la diastole vengono regolate da un sensore ad effetto Hall che segnala il
rigonfiamento della sacca e innesta automaticamente la sistole. Finita questa fase di eiezione, il
compressore genera il vuoto nell’intercapedine iniziando la fase diastolica. Non è possibile sapere
con certezza se la sistole avviene in maniera completa o se rimane un residuo sanguigno all’interno
della sacca a causa delle elevate resistenze del circuito fisiologico. Per questo motivo si ritiene
necessario monitorare il paziente nelle ore successive all’impianto.
L’effetto di vuoto diastolico pari a 3-5 mmHg che la pompa crea nella fase di diastole è sufficiente
solo se l’incannulazione si trova a livello apicale perché esiste una pressione interna ventricolare più
elevata di quella che si avrebbe se l’anastomosi fosse eseguita a livello atriale (3-5 mmHg); in
questo secondo caso servirebbe quindi una P di aspirazione pari a 20-30 mmHg che genererebbe un
forte rischio di emolisi durante il passaggio dei globuli rossi attraverso le valvole. Per garantire un
buon riempimento della pompa è necessario avere una buona pressione di precarico. Il problema di
questi pazienti è che hanno una cattiva perfusione degli organi e risultano quindi edematosi, spesso
anche a livello polmonare. Per ovviare al problema si somministrano farmaci diuretici che
smaltiscono i liquidi in eccesso ma, di conseguenza, fanno diminuire anche il volume di sangue a
disposizione. Per questo serve raggiungere un compromesso tra la diminuzione dei liquidi in
esubero e la garanzia di pressioni sufficienti a garantire un buon precarico della pompa.
Tuttavia sia i sistemi pneumatici sia quelli elettromeccanici non garantiscono un recupero agevole
del paziente dal momento che lo vincolano ad essere collegato o al compressore o alla batteria che
costituiscono una limitazione notevole per la vita sociale dell’individuo.
4. Il cuore artificiale
Un vero e proprio cuore artificiale non esiste ancora dal momento che non si riesce ad ovviare al
problema dell’approvvigionamento dell’energia escludendo un’alimentazione esterna. L’ottimo
consisterebbe nell’avere l’energia all’interno dell’organismo con una fonte inesauribile senza
alimentarla dall’esterno. Si è pensato di sfruttare l’energia muscolare, ma i dati in letteratura
scoraggiano la ricerca in tal senso. Per dimensionare il cuore artificiale dal punto di vista energetico
bisogna partire dai suoi dati targa:
P=2W (fino a 6-7 W sotto sforzo);
Q=5l/min (fino a 12-13 l/min sotto sforzo);
η= 10% almeno (il 90% dell’energia può essere dissipata senza problemi dal corpo).
Una volta ottenute le specifiche bisogna pensare a :
•
una sorgente di energia
•
un convertitore di energia (con un certo η)
•
un ventricolo (attuatore)
•
un accumulatore.
Quest’ultimo elemento è quello che garantisce la regolabilità del sistema perchè è in grado di
conservare l’energia proveniente da una fonte continua ed inesauribile e di cederla nei momenti di
elevata richiesta. La sua collocazione all’interno del sistema meccanico può avvenire tra la sorgente
ed il convertitore oppure a monte del ventricolo. La scelta di posizionamento dipende dal tipo di
energia accumulata (elettrica, termica o meccanica). Di solito si preferisce la posizione a valle del
convertitore per gli accumulatori elettrici mentre si sceglie l’altra soluzione per quelli termici.
Le fonti energetiche fino ad ora individuate sono:
•
l’accoppiamento induttivo
•
gli isotopi radioattivi.
Per quest’ultima categoria si ritengono interessanti le caratteristiche del plutonio 238 e dell’ossido
di plutonio che sarebbero in grado di fornire energia sufficiente al funzionamento dell’impianto con
la possibilità di essere facilmente schermati, senza così procurare grossi danni al paziente. Il tempo
di dimezzamento del
238
Pu è di 86 anni e pastiglie di circa 40 g sono sufficienti per fornire tutta
l’energia necessaria ad un cuore artificiale.
Bisogna tenere conto del fatto che costruire un cuore artificiale basato su sistemi energetici di
questo tipo necessita della conoscenza dello stile di vita di ogni singolo paziente per cui ogni
impianto deve essere tarato ad hoc. Alcuni studi hanno monitorato pazienti americani mostrando
grafici P(Watt) vs t(ore) dai quali si evince che la richiesta media di potenza cardiaca è circa 3W; a
partire da questo dato, tenendo conto del rendimento del sistema pari a circa il 10%, la fonte di
energia deve essere almeno di 30W in continuo. Questo implica la necessità di un accumulatore in
grado di conservare l’energia prodotta in eccesso dalla pila durante i periodi di calma nei quali è
richiesta un potenza inferiore alla media.
4.1 Fonti di energia impiantabili ed inesauribili
Uno dei problemi principali delle pompe impiantabili è il collegamento con l’esterno per garantire
l’approvvigionamento di energia. Per eliminare il foro transcutaneo si pensa ad una sorgente di
energia posta sopra o sotto la cute, senza collegamento diretto. Nel primo caso si utilizza un
accoppiamento induttivo che fornisce energia elettrica all’accumulatore per poi essere trasformata
in energia meccanica da un convertitore.
Nel secondo caso la sorgente di energia può essere costituita da una pastiglia di radioisotopo, in
particolare si sceglie il plutonio 238 perché garantisce una fornitura di energia costante durante la
vita media di un impianto grazie al suo tempo di dimezzamento pari a circa 86 anni. Oltre alle già
citate caratteristiche, il
238
Pu è il materiale d’elezione per questo tipo di impianti perchè la sua
instabilità lo rende radioattivo a qualsiasi temperatura fino al limite dei 650°C (punto di fusione che
non deve essere raggiunto nell’impianto), ha un basso rapporto peso/resa e garantisce quindi la
potenza necessaria con una massa di materiale molto ridotta. Le radiazioni emesse sono:
•
radiazioni α
•
radiazioni γ
•
raggi χ
•
raggi β
Per garantire la salute del paziente serve un’apposita schermatura che ripari i tessuti dalle radiazioni
emesse. Il livello di radiazioni che non procura danni biologici nel 100% dei casi è stato calcolato a
5-7 Rem/anno (3 Rem in 13 settimane); nel caso di un cuore artificiale si pensa che la radiazione
assorbita dall’organismo sia pari a circa 8 rem/anno che, su un arco di circa 20 anni, è un
quantitativo ampiamente tollerabile. Bisogna inoltre tener presente che esistono organi più soggetti
di altri a subire danni da radiazione come la milza, i reni e le gonadi; serve quindi posizionare la
sorgente radioattiva il più distante possibile da questi tessuti. È stato calcolato che il quantitativo di
radioisotopo necessario per far funzionare il dispositivo è di soli circa 40g, anche se necessita di una
schermatura metallica molto più pesante (fig.10).
Radioisotopo
Liquido
accumulatore
Metallo
schermante
Figura 10: schema del posizionamento della pastiglia di radioisotopo
rispetto alla barriera schermante ed al liquido accumulatore.
La pastiglia emette sempre energia anche quando non è richiesta; quindi serve un accumulatore o un
dissipatore.
Scegliere di usare un dissipatore è poco utile dal momento che gran parte dell’energia prodotta
andrebbe persa e non risulterebbe disponibile nei momenti di richiesta massima. La sorgente di
energia è infatti tarata per fornire un’energia media costante per il fabbisogno cardiaco; quando ne
viene richiesta meno (ad esempio durante il sonno) l’energia prodotta in eccesso può essere
accumulata e restituita nel momento in cui il fabbisogno è superiore alla potenza fornita dal
radioisotopo. Serve dunque una sostanza in grado di accumulare calore senza variare le proprie
caratteristiche chimico-fisiche. Gran parte delle sostanze note come il legno, il metallo, l’acqua ecc.
sono in grado di storare calore in transizione di fase, ma ben pochi materiali hanno la caratteristica
di non produrre vapore, di non dilatarsi e di mantenere la temperatura della pastiglia del
radioisotopo sotto il suo punto di fusione. Per questi motivi si pensa di porre l’idruro di litio intorno
alla pastiglia radiottaiva in modo da rispondere alle specifiche energetiche richieste e da costituire
una seconda schermatura per le radiazioni permettendo il sottodimensionamento della bariera
schermante.
Per dimensionare correttamente l’accumulatore serve sapere l’andamento della richiesta di potenza
da parte del paziente durante tutta la giornata. Se la potenza media richiesta è di circa 3W e se
quella massima è di 6W, un accumulatore di circa 20W conserva l’energia quando la richiesta è
inferiore alla soglia dei 3W e la cede quando è superiore. Ovviamente più è marcata l’oscillazione
di richiesta energetica più grande deve essere l’accumulatore. È da sottolineare il fatto che se alla
fine della giornata l’energia spesa è maggiore o minore di quella prodotta, il livello di riempimento
dell’accumulatore subirà uno shift verso l’alto o verso il basso portando, nel primo caso, al
surriscaldamento della pastiglia, nel secondo, all’insufficienza di energia durante gli sforzi. Un
buon accumulatore deve essere costituito da un materiale che abbia un punto di fusione ed un calore
latente elevati per garantire una buon livello di conversione energetica da quella termica a quella
meccanica (550 °C) in transizione di fase. La massa della miscela eutettica necessaria si calcola dal
rapporto Emax/λfus.
4.2 La conversione dell’energia
I metodi per la conversione dell’energia si dividono in diretti ed indiretti.
Nel primo caso si hanno:
•
termocoppie per effetto Peltier;
•
conversione termoionica per effetto Seebek.
Qui si ottiene la conversione dell’energia termica in elettrica per la trasformazione successiva in
quella meccanica.
Per i sistemi di conversione elettrica per le applicazioni nell’ambito dei cuori artificiali sono
richieste le seguenti caratteristiche:
peso ridotto
ingombro limitato
bassa rumorosità e vibrazioni
alto rendimento
elevata affidabilità e durata
Nel secondo caso invece si hanno:
•
cicli Rankine;
•
cicli Stirling;
•
cicli Joule.
In tutti questi sistemi si ha la trasformazione diretta del calore in lavoro mediante cicli a gas che
agiscono a due temperature diverse. Nel caso dell’applicazione per il cuore artificiale il “pozzo
freddo” è rappresentato dalla temperatura corporea, mentre quello caldo si trova a circa 550°C ed è
alimentato dalla pila radioattiva. La massima resa di questi cicli è espressa dal rendimento del ciclo
di Carnot che si calcola come:
η=Lu/Qe= (Qe-Qu)/Qe=1-Qu/Qe
che nel caso specifico è pari a:
η=1-Tf/Tc=1-310/823= 62%
ciò rappresenta il massimo rendimento teorico ottenibile; già a questo livello c’è una perdita
energetica pari al 38%.
4.2.1 I METODI DIRETTI-LA CONVERSIONE TERMOELETTRICA
Nella conversione termoelettrica si sfrutta il principio di Peltier per produrre corrente avendo a
disposizione una sorgente fredda e una calda.
Si utilizza un circuito elettrico costituito da due materiali metallici differenti immersi
rispettivamente nelle due sorgenti di calore; a causa dell’elevato ΔT si genera un flusso di corrente.
Il sistema, costituito da termocoppie, risponde ottimamente alle caratteristiche di peso e di
ingombro ridotti, garantisce un’alta affidabilità e un riduzione di rumore e di vibrazioni. Il grosso
inconveniente risiede però nel rendimento che risulta pari solo ad una frazione di quello ottimale di
Carnot:
η = γ ΔT/T1
con γ = (1+ZAB TM)1/2 -1 / (1+ ZAB TM)1/2 -T1/T2 < 1
con ZAB TM=cost
dove ZAB rappresenta la cifra di merito che caratterizza il materiale e TM è la temperatura media a
cui avviene la trasformazione.
Oltre ad una riduzione dovuta solo ad fattore puramente numerico, il rendimento di questi sistemi
presenta un altro problema derivato dal suo andamento rispetto al carico applicato. La forma del
grafico η vs R a campana rende massimo il valore di η solo in un ristretto range di carico applicato;
a livello fisiologico questo fattore rappresenta una grossa limitazione dal momento che le resistenze
sono molto variabili in funzione dello stile di vita del paziente. Se il rendimento diminuisce accade
che l’intero sistema scarica un quantitativo maggiore di calore all’interno del sangue che non viene
completamente dissipato. Ciò porta a tre conseguenze molto negative:
l’innalzamento della temperatura sanguigna con i relativi problemi di emolisi;
l’ulteriore diminuzione del rendimento (la Tf aumenta);
l’insufficienza di energia fornita al cuore durante gli sforzi a causa delle eccessive perdite di
energia.
Per ovviare a questo problema si potrebbe montare all’interno dell’intero complesso del cuore
artificiale un accumulatore elettrico a valle del convertitore in modo da sfruttare al meglio il suo
elevato rendimento di picco pari a circa il 30%. In realtà questa opzione è poco praticabile dal
momento che un accumulatore elettrico rappresenterebbe un elemento aggiuntivo rispetto a quelli
tradizionalmente previsti per questo tipo di applicazioni ed inoltre non si è oggigiorno in grado di
ottenere batterie che possono di rado essere sostituite perchè sottoposte ad un’elevata frequenza di
cicli di carica e scarica.
4.2.2 I SISTEMI DIRETTI-LA CONVERSIONE TERMOIONICA
Un altro metodo diretto per la trasformazione dell’energia termica in elettrica è la conversione
termoionica. In questo caso si sfrutta l’effetto Seebeck secondo il quale un catodo riscaldato emette
elettroni che vengono violentemente attratti da un anodo; da qui la corrente passa attraverso un
carico resistivo e ritorna al catodo. Tutte le considerazione energetiche valide per i sistemi
termoelettrici lo sono anche per quelli termoionici; in questo secondo caso vi è inoltre un problema
di durata dovuto al consumo di anodo e catodo.
4.2.3 I SISTEMI INDIRETTI- IL CICLO RANKINE
Tutti i sistemi indiretti si basano su cicli termodinamici e possiedono l’enorme vantaggio di essere
miniaturizzati (alcune turbine hanno un diametro inferiore a 1 cm).
I cicli termodinamici possono essere a vapore (Rankine) o a gas (Joule e Stirling); un’ulteriore
classificazione può essere effettuata in funzione del tipo di movimento dei pezzi meccanici:
macchine rotative (Rankine e Joule) e macchine volumetriche (Stearling).
T
gas
Tc
di fase liquido-vapore di un fluido posto in un
vapore
liquido
3
Il ciclo Rankine (fig.11) si basa sulla trasformazione
4’
4
sistema.
2
5’
1
5
Figura 111: ciclo Rankine.
5’’
S
Si effettuano una serie di trasformazioni che sfruttano le proprietà fisiche del fluido usato nel
circuito per ottenere una conversione tra energia termica ed elettrica. Dal grafico si evidenziano i
seguenti passaggi:
1-2 aumento di pressione
2-3 isobara, aumento di temperatura
3-4 isotermobarica
4-5 espansione in turbina con diminuzione di P e T
5-1 condensazione; P e T costanti
Oppure
4-4’ isobara; aumento di T
4’-5’ espansione in turbina
5’-5’’ isobara
5’’-1 condensazione; P e T costanti.
Il circuito si basa su una pompa che comprime il fluido e lo spinge nello scambiatore di calore; qui
gli viene fornita l’energia necessaria per scaldarsi attraverso una trasformazione isobara. Una volta
ottenuto il vapore, questo si espande facendo girare una turbina e termina il suo ciclo all’interno di
un altro scambiatore di calore che lo condensa.
Il rendimento del ciclo Rankine è funzione del tipo di curva limite del fluido e della posizione del
suo punto critico rispetto alla temperatura massima che si ha a disposizione. Nel caso di un cuore
artificiale il pozzo caldo è a 550°C mentre quello freddo è fissato alla temperatura corporea di 37°C.
Usare liquidi con una temperatura critica troppo distante da quella della sorgente calda farebbe
diminuire eccessivamente il rendimento dal momento che il ciclo non sfrutterebbe tutta l’energia a
disposizione. Elementi come l’acqua vanno scartati per questo tipo di applicazione dal momento
che Tc si attesta a 374°C; si preferiscono i fluidi come gli alcalini e il mercurio, anche se il loro
costo è elevato e la loro tossicità richiede una buona schermatura. Nella determinazione del η di
questo ciclo intervengono poi altre considerazioni riguardanti il rendimento massimo teorico
(Carnot) e la pressione di condensazione. In linea di principio, la miglior resa ottenibile è del 62%
se si considera costante il ΔT durante il ciclo. Ciò non avviene nel caso di Rankine dove la distanza
tra Tf e Tc varia durante le trasformazioni: l’obbiettivo è quello di massimizzare la parte di
trasformazione che sottende la curva limite in modo da approssimare al meglio il rendimento di
Carnot. Un altro problema, che riguarda maggiormente il mercurio, è rappresentato dal fatto che
durante la condensazione, una volta fissata la temperatura (37°C), risulta determinata anche la
pressione di lavoro (trasformazione isotermobarica). Nel caso del Hg a 40 °C la pressione è pari ad
un millesimo di quella atmosferica e questo minaccia il fallimento strutturale dell’intero dispositivo
oltre che richiedere una serie di pompe e dei booster per lavorare a pressioni cosi basse.
È da far notare che esistono due strade da percorre durante un ciclo Rankine: una prevede una fine
di espansione con una miscela vapore-fluido, mentre l’altra richiede un ulteriore postriscaldamento
con una terminazione di espansione con solo vapore. Nell’applicazione di questo ciclo per cuori
artificiali, la turbina ha un diametro di circa 1 cm e le palette potrebbero essere erose dall’urto
violento con particelle di fluido che si trovano eventualmente immerse nel vapore durante
l’espansione. Per ovviare a questo inconveniente o si procede al post-riscaldamento (4-4’) oppure si
usano fluidi che hanno una curva limite inclinata in modo da essere sicuri che dopo l’espansione
esso si trovi ancora in uno stato di solo vapore e a temperatura maggiore di quella del pozzo freddo,
senza la necessità di una postcombusione. Proprio per quest’ultimo motivo si rende possibile anche
la rigenerazione mediante uno scambio di calore tra il vapore direttamente in uscita dalla turbina ed
il liquido in entrata nello scambiatore di pressione. In altri casi non sarebbe possibile rigenerare a
causa della difficoltà di effettuare uno spillamento da una turbina miniaturizzata mediante dei
capillari che genererebbero dell’eccessive resistenze. Fluidi che hanno la curva limite inclinata sono
generalmente quelli organici come l’esafluorobenzene e l’ottofluorociclobutano che hanno però il
difetto di degradarsi nel tempo variando le loro caratteristiche fisiche.
Un’ultima problematica riguarda l’influenza della forza di gravità sull’intero sistema ed in
particolare sul condensatore nel quale le gocce di liquido potrebbero trovarsi in posizione non ideale
al funzionamento della macchina nel momento in cui il paziente si venga a trovare per un certo
lasso di tempo a testa in giù. Per aggirare questa limitazione si sono progettati dei sistemi, chiamati
550°C
jet condenser, nei quali si condensa il vapore mediante
l’immissione in pressione di un flusso di liquido freddo che
trascina con se le particelle aeriformi. La condensazione
P
Topper Hg
condensatore
avviene ad una temperatura superiore ai 37°C e perciò
necessita di un pozzo caldo a temperatura più elevata dei 550
°C, per evitare una diminuzione di rendimento.
Si sta studiando di accoppiare una macchina a ciclo Rankine
con una termocoppia oppure con un’altra macchina Rankine
Combustore ciclo H2O
P
Bottomer H2O
condensatore
con liquidi diversi in modo da innalzare il rendimento
η*=η1+η2+η1η2. Nel primo caso si pensa di utilizzare come
sistema “topper” la termocoppia e come “bottomer” un ciclo a
vapore con acqua. Nel secondo caso (fig. 12) una macchina
può utilizzare un ciclo di fase a vapore con del mercurio,
37°C
Figura 112: cicli Rakine combinati
condensante ben al di sopra dei 37°C in modo da eliminare il problema della prepompa. Il calore di
condensazione viene fornito all’acqua presente nel secondo impianto che cicla tra due temperature
più basse.
4.2.4 I SISTEMI INDIRETTI-I CICLI A GAS (JOULE E STIRLING)
Per ovviare al problema della condensazione si possono utilizzare cicli a gas (Joule) (fig. 13). Nel
piano S-T il ciclo si compone come segue:
T
1-2: compressione;
3
2-3: riscaldamento isobaro;
4
3-4: espansione;
2
4-1: raffreddamento isobaro.
1
Figura 113: ciclo Joule.
Il rendimento si aggira attorno al 15%, più basso del ciclo
S
Rankine, ma più rapido negli adattamenti alle variazioni di
richiesta energetica. Se il punto 4 si trova a temperatura maggiore del punto 2, si può procedere alla
rigenerazione; in questo caso però bisogna tenere presente che il coefficiente di scambio termico tra
i gas è basso e bisogna quindi garantire una vasta area di scambio (ingombro).
Le macchine per la trasformazione dell’energia termica in energia elettrica possono essere rotative o
alternative.
Nel primo caso i sistemi devono essere miniaturizzati (1cm di diametro) e devono garantire elevate
velocità di rotazione (300000 rpm a vapore, 500000-650000 rpm a gas) e comportano la
progettazione di sistemi di lubrificazione a olio o a gas che sostituiscano i più tradizionali cuscinetti
a sfera. Serve inoltre una meccanica molto precisa ed equilibrata per evitare il disassamento, la
rumorosità e le vibrazioni.
Nel secondo caso i sistemi sono difficili da equilibrare evitando l’usura delle parti meccaniche in
moto relativo; si sfruttano i cicli di Stirling (fig. 14) quasi totalmente rigenerativi (2-3, 4-1):
1-2: compressione isoterma (cedimento di calore);
T
3
2-3: riscaldamento isoscoro;;
4
3-4: espansione isoterma (acquisizione di calore);
4-1: raffredamento isocoro.
2
Il ciclo è tecnicamente difficile da realizzare soprattutto a
1
S
Figura 114: ciclo Stirling
causa delle due trasformazioni isoterme che, nella realtà,
non sono lineari, ma “a dente di sega” e l’intero ciclo assume una forma ovoidale. Il vantaggio è
quello di avere un rendimento elevato (già testato sui vitelli), ma le ridotte dimensioni dell’impianto
non rendono tecnicamente possibile superare i rendimenti di altre macchine meccanicamente meno
complesse.
5. La dialisi
In Italia, decine di migliaia di pazienti sono costretti a ricorrere alla dialisi per problemi di
insufficienza renale. La riduzione dell’attività dei reni al di sotto della soglia del 5% comporta che i
cataboliti prodotti nei processi di sintesi e l’acqua che si ottiene dalla respirazione cellulare si
accumulano nel sangue e negli spazi interstiziali, alterando pesantemente e velocemente gli
equilibri biochimici. È necessario quindi che si intervenga artificialmente ogni 48h ore per prelevare
ed eliminare queste sostanze in eccesso.
Finora la dialisi rappresenta l’unica speranza di sopravvivenza per questa categoria di pazienti, che
sono obbligati a recarsi 3 volte a settimana presso i centri specializzati e a sottoporsi a trattamenti
emodialitici per circa 4h ore a seduta. La vita di queste persone rimane fortemente condizionata
dalla loro patologia e il recupero sociale risulta difficile. Ad oggi, non esiste un vero e proprio rene
artificiale, vale a dire un dispositivo interamente impiantabile che garantisca loro una filtrazione
sanguigna continua simile al processo fisiologico e li svincoli dalla presenza di una macchina
esterna.
Il principio su cui si basano i filtri per dialisi è quello di sfruttare una membrana microporosa per
favorire il passaggio dei soluti per diffusione e quello dell’acqua per ultrafiltrazione. Questi due
processi agiscono contemporaneamente e si influenzano a vicenda. Ai fini dei calcoli è possibile
considerarli separatamente (fig. 15).
P
Q1Csi
P
scarto
JcA
Jsoluti
Jinterstizio
300-400ml/min
Qultra filtrazione
Q2Csu
Riserva liquido
dializzante
Figura 15: schema del circuito dialitico.
700-800ml/min
Per sapere il quantitativo di soluti che passa attraverso la membrana è necessario scrivere un
bilancio di massa:
Q1Csi-JcA=Q2Csu
Dove Q1 e Q2 sono le portate di sangue entranti e uscenti dal dializzatore, Cs1 e Cs2 rappresentano le
concentrazioni di soluti, J è il flusso di cataboliti e A è l’area di scambio della membrana (circa
1m2).
Sapendo che oltre ai soluti viene filtrata dell’acqua, risulta che Q1 è maggiore di Q2, per cui le
concentrazioni di sali dal lato del sangue variano in funzione sia della diffusione sia
dell’ultrafiltrazione.
È tuttavia possibile considerare il flusso molare M di soluti attraverso la membrana, supponendo
un’ultrafiltrazione nulla. In questo caso si ha:
Muf=0=Qs(Csi-Csu)=Qd(Cdu-Cdi)
Dove Qd è la portata di liquido dializzante, mentre Cdu e Cdi sono rispettivamente la concentrazione
di soluti all’ingresso e all’uscita dal dializzatore dal lato della soluzione.
Il passaggio dei cataboliti dipende dal coefficiente di diffusione D del sangue, della membrana e
della soluzione dializzante oltre che dal loro gradiente di concentrazione; di seguito è riportata la
legge di Fick:
J=D δC/δx
È anche possibile definire un altro utile parametro (Clearance) per descrivere la capacità di
eliminazione dei soluti caratteristica di un particolare filtro per la dialisi:
CL=M/Csi=(QsiCsi-QsuCsu)/Csi
=Qs(Csi-Csu)/Csi=Qs(1-Csu/Csi) se Quf=0
Dove Quf è la portata di ultrafiltrazione.
La curva CL vs Qs è un dato della macchina.
Se si considera solo il passaggio di acqua dal sangue al liquido dializzante si ottiene invece:
Quf=Lp(ΔP-Δπ)
Dove Lp è il coefficiente di filtrazione, mentre ΔP e Δπ sono rispettivamente la differenza di
pressione idraulica e di quella oncotica tra sangue e liquido dializzante.
Bisogna inevitabilmente calcolare i corretti tempi di dialisi per evitare che, lo spillamento di liquido
dal sangue verso la soluzione, non segua una dinamica più elevata di quella necessaria al fine di
evitare lo svenimento del a causa dell’eccessivo calo di pressione.
La curva caratteristica di Quf vs ΔP (fig. 16) ha uno
Q
shift iniziale pari a 25 mmHg, che rappresenta il
salto pressorio minimo da imporre al sangue per
vincere la pressione di richiamo oncotico, ed un
plateaux,
Δp
25mmHg
che
è
testimonianza
dell’effetto
di
impaccamento delle proteine sulla membrana che
ostacolano il flusso.
Figura 16: Quf vs ΔP
Regolare il ΔP di ultrafiltrazione è importante dal
momento che si deve assolutamente evitare che la
Chiusura valvola
Psi
pressione oncotica generi un flusso retrogrado di
ΔP
liquido dal dializzatore al sangue e garantire
contemporaneamente
una
non
Apertura valvola
Psu
Pdi
eccessiva
sottrazione di liquido. Per fare questo basta porre
Pdu
una valvola a valle del dializzatore sulla linea del
Figura 17: ΔP tra i due compartimenti fluidi e
sangue, in modo che si possa gestire il ΔP funzionamento della valvola dal lato de sangue.
semplicemente aprendola o chiudendola, in modo da far variare P e Q, che dipendono solo dalle
resistenze del circuito (fig. 17).
Su questo tipo di circuiti si usano pompe roller in configurazione completamente occlusiva dal
momento che si deve fornire una portata costante al variare del carico e senza creare problemi di
emoliticità a causa delle portate ridotte (300-400ml/min). La pompa peristaltica deve garantire una
differenza di pressione tra sangue e liquido dializzante maggiore di Δπ, sufficiente a vincere le
perdite di carico che si generano nei pori di 50 Å di diametro ed abbastanza alta da creare un flusso
di liquido verso il compartimento dialitico. La pompa dal lato sangue, posta a monte del filtro, viene
coadiuvata nella sua azione dalla pompa roller dal lato del liquido dializzante, situata a valle della
cartuccia, in modo da garantire comunque un ΔP che non faccia refluire l’acqua nel sangue.
Il filtro per dialisi è realizzato con circa 15000 tubicini di silicone (o di polisulfone o di
poliacrilonitrile) posti in parallelo e sigillati agli estremi mediante centrifugazione con una resina
che ne garantisce l’isolamento e la tenuta meccanica. Lo scambio diffusivo avviene attraverso la
parete polimerica, mentre quello ultrafiltrativo sfrutta la presenza dei pori creati nella parete
attraverso l’evaporazione del solvente in fase di fabbricazione. Il liquido dializzante deve dunque
essere sterile perchè entra a diretto contatto con il sangue.
Le fibre siliconiche garantiscono una ridotta risposta infiammatoria e possono essere estruse
ottenendo un elevato rapporto spessore/diametro in modo da garantire rigidezza e non collassabilità
senza per questo gravare sulla difficoltà di ottenimento industriale. Le dimensioni tipiche sono
quelle riportate in figura 18.
25μm
cartuccia
100μm
Singola fibra
Figura 18: dimensioni della fibra di silicone.
Spessori troppo elevati possono ostacolare il processo diffusivo; per questo l’obbiettivo progettuale
è quello di ottenere le fibre con la sezione di passaggio molto ridotta (l’attenzione va posta
comunque alle perdite di carico e agli sforzi di taglio) e il più possibile omogenee tra loro in modo
da garantire un flusso di soluti uniforme in tutto il filtro. L’involucro è costituito da un contenitore
di policarbonato.
Un altro target progettuale, che riguarda la cartuccia
nel suo insieme, è la limitazione del volume di
priming e la garanzia di un flusso laminare di sangue
all’interno dei capillari in modo da evitare il
fenomeno dell’emolisi.
Un grosso problema legato alla dialisi è l’accesso
Shunt artero
venoso laterolaterale
vascolare che deve essere effettuato tre volte alla
Shunt artero
venosotermino
terminale con graft
artificiale
Figura 19: differenti soluzioni a livello di shunt
arterovenoso.
settimana solitamente a livello dell’arteria radiale e
della vena cefalica. Le soluzioni adottate (fig.19)
sono diverse a seconda della filosofia di approccio al
problema, anche se l’obiettivo è quello di raggiungere il minimo livello possibile di invasività.
Negli USA si adotta spesso uno shunt arterovenoso termino-terminale mediante un graft artificiale.
Questo garantisce una buona funzionalità cardiaca a fronte però dell’utilizzo di un materiale
sintetico. In Europa si tende invece ad effettuare uno shunt arterovenoso latero-laterale in modo da
incrementare la portata venosa di sangue fino ad 1,5 l/min e da lasciare parzialmente libera la
circolazione della mano, a discapito però di problemi al tunnel carpale.
A livello dello shunt avviene la puntura con aghi di grosso diametro (14-16 Gauge pari a circa
2mm) per prelevare la portata richiesta. L’ago rappresenta il punto più critico a livello di
emoliticità.
Il trattamento dialitico procura uno spostamento della curva P vs V del cuore in quanto questo deve
pompare un quantitativo di sangue maggiore per compensare la portata sottratta dalla macchina.
Oltre a ciò, solo lo shunt arterovenoso provoca un riarrangiamento delle portate che influisce
pesantemente sul lavoro fornito dal cuore che può provocare problemi collaterali come l’ipertrofia o
la cardiomiapatia dilatativa.
I costi legati alla dialisi sono molto elevati e per questo motivo gli sforzi sono rivolti alla ricerca di
nuove tecnologie meno dispendiose. Solo in Italia i pazienti dializzati sono circa 40000, i quali
subiscono 155 dialisi all’anno. I costi sono di circa 30€ per il filtro, 10-15€ per i liquidi dializzanti,
3€ per i tubi e 1 € per gli aghi. Considerando anche le spese del personale e della struttura
ospedaliera che fornisce il servizio, si arriva ad una spesa annua nazionale pari a circa 900
mln€/anno.
Per diminuire queste spese si tenta oggi di trasferire le cure dialitiche a domicilio con tutti i
problemi connessi al grado di preparazione tecnica del paziente che deve essere in gradi di far
funzionare l’impianto, o di riutilizzare i filtri per più sedute per il medesimo paziente. Quest’ultimo
processo, oltre a costituire un risparmio economico, ha mostrato vantaggi dal punto di vista della
minore
risposta
infiammatoria
ottenuta
mediante
il
rivestimento
proteico
depositato
progressivamente sulle fibre siliconiche.
L’alternativa alla dialisi tradizionale è rappresentata dalla dialisi peritoneale che attualmente
riguarda solo il 10% dei dializzati italiani. In questo caso si sfrutta la propria membrana peritoneale
nativa come elemento filtrante e si inietta del liquido dializzante nell’addome del paziente mediante
un accesso transcutaneo permanente. La dialisi si ottiene per differenza di concentrazione tra la
soluzione ed il compartimento ematico. Attraverso un secondo accesso si scarica la soluzione
salina.
6.Gli ossigenatori
L’assistenza respiratoria viene richiesta da quei pazienti le cui funzioni meccaniche o diffusive dei
polmoni sono compromesse a causa di una patologia o di un evento traumatico. In tutti questi casi si
può intervenire con un assistenza pneumatica sui polmoni, dilatandoli artificialmente con
l’immissione forzata di gas attraverso i bronchi, oppure agendo direttamente sul sangue fino ad
instaurare un rapporto di scambio gassoso che porta all’ossigenazione.
La trattazione seguente è rivolta solo ai sistemi di supporto alla vita che garantiscono gli scambi
gassosi dal lato del sangue.
Per i pazienti fortemente traumatizzati a livello toracico nei quali la struttura polmonare è
completamente compromessa o per i bambini che nascono con dei ritardi nella formazione del
parenchima polmonare o, ancora, per l’assistenza dei pazienti in CEC con un by-pass completo e
sotto effetto di curaro, l’unica via percorribile, al fine di ossigenare il sangue, è quella di creare
un’interfaccia di scambio gassoso mediante membrane (fig. 20) o attraverso il gorgogliamento del
gas nel fluido.
Gas
membrana
Sangue
Figura 20: ossigenatori a membrana.
I metodi più usati prevedono la presenza di una membrana polimerica (di solito si tratta di silicone o
polipropilene) che funge da parete di scambio puramente diffusivo (membrana semipermeabile) o
da interfaccia per la convezione e la diffusione del gas nel sangue (membrana microporosa).
Nel primo caso si creano due compartimenti nettamente separati nei quali il sangue ed il gas
scorrono in controcorrente senza entrare in contatto diretto e lo scambio di ossigeno e di anidride
carbonica avviene seguendo solo la legge della diffusività di Fick:
J=D δC/δx
dove J è il flusso della specie chimica considerata, D il coefficiente di diffusività e δC/δx è il
gradiente di concentrazione.
Se si introducono le pressioni parziali al posto delle concentrazioni, grazie alla legge di Henry si
può scrivere:
J=D α δP/δx
dove α è la solubilità della sostanza in gioco.
Per passare dalle pressioni parziali di ossigeno alle sue concentrazioni, si sfrutta un doppio grafico
in cui nell’ascissa di destra sono riportati i valori di PO2, in quella di sinistra le concentrazione di
O2 e in ordinata la saturazione dell’emoglobina. Nel quadrante di destra è riportata la curva di
saturazione dell’emoglobina in funzione del pH, della temperatura e della PCO2, mentre in quello
sinistra le relazioni Sat vs [O2] sono poste in funzione dell’ematocrito che, in questo caso,
rappresenta il coefficiente α della formula di Henry (fig.21).
Saturazione
pH
Ht
T
[O2]ml/dL
[CO2]
PO2 mmHg
Figura 21: abaco con PO2, [O2] e saturazione dell’ Hb.
Nel secondo caso, la membrana è micropororsa per cui, all’interno delle aperture, il sangue e il gas
entrano in contatto. Nei pori di piccole dimensioni il sangue penetra per capillarità e vi rimane
adeso istaurando un regime di scambio puramente diffusivo con il gas; nei pori di grandi dimensioni
il sangue fluisce invece in continuità e favorisce uno scambio convettivo contemporaneamente a
quello diffusivo. In quest’ultima configurazione la membrana aumenta il rischio di formazione di un
embolo nel lato del sangue o l’eccessiva trasudazione di plasma nel lato del gas che
comprometterebbe la funzione della macchina. È utile sottolineare che la tecnica di fabbricazione di
una membrana microporosa di polipropilene, che avviene per evaporazione di solvente, comporta la
formazione di pori di grosse dimensioni rispetto a quelle dell’ossigeno e dell’anidride carbonica
(700 Å contro i 35Å circa di O2 e di CO2). In aggiunta a questo le aperture risultano di forma
irregolare e con sezione passante non rettilinea e a volte non completa (fig. 22). Produrre membrane
per ossigenatori con porosità regolare di circa 50 Å come nel caso dei dializzatori richiederebbe uno
sforzo economico troppo ingente che andrebbe a sottrarre utili risorse in altri campi applicativi di
maggior interesse sanitario. Proprio per questo tipo di valutazioni si tende oggi ad usare le
membrane siliconiche semipermeabili.
Tipi di foro passante in una
membrana di polipropilene
Effetto della capillarità dei fori
piccoli (sx) nei quali c’è solo
diffusione; effetto di convezione
nei fori grandi (dx)
Figura 22: schema del comportamento dei pori rispetto al flusso di sangue
Il campo di applicazione degli ossigenatori per il sangue non è rappresentato solo dalla CEC, ma
anche dalla tecnica ECMO (extra corporal membrane oxigenation). Con questo sistema si vuole
sopperire alla mancata funzione dei polmoni derivata dalle più svariate patologie, sostituendola
interamente o parzialmente con un circuito extracorporeo che preleva il sangue dalla vena femorale
e lo rimette controcorrente nell’arteria femorale. Queste apparecchiature lavorano solitamente con
una portata di sangue pari a circa 80% (circa 4l/min) del totale, il che comporta una serie di
problematiche:
•
si procura uno sforzo strutturale non indifferente aspirando da una vena che non supporta 4
litri di sangue al minuto in condizioni fisiologiche;
•
si generano in aorta alcuni flussi ematici contrastanti e numerosi problemi renali come
conseguenza della cattiva irrorazione dei rami di arterie renali che si dipartono dall’aorta
discendente (il naturale design delle biforcazioni è ottimizzato per flussi discendenti
eliminando la turbolenza e gli sforzi di taglio);
•
si aumentano notevolmente gli sforzi di taglio sul sangue con i relativi problemi di emolisi;
•
si rischia l’eccessivo abbassamento dell’ematocrito perchè la macchina prevede volumi di
riempimento di circa ½ litro che devono essere colmati con soluzione salina.
Un campo di applicazione di questa tecnica si riscontra a livello neonatale, per quei bambini che
nascono con un cattivo sviluppo del parenchima polmonare. Per questi, una ventilazione forzata
servirebbe a poco dal momento che il problema risiede nei tessuti di scambio e non nella funzione
meccanica; forzare l’aria all’interno dei bronchi non migliora (anzi a volte peggiora) lo sviluppo
delle membrane alveolari che, specialmente in età precoce, sono estremamente delicate. Per tale
motivo si utilizza l’ossigenazione extracorporea per garantire un periodo di cura farmacologia al
tessuto polmonare fino al raggiungimento dello svezzamento respiratorio. Le macchine per i neonati
sono opportunamente dimensionate, ma il volume di priming risulta proporzionalmente più elevato
di quello di un adulto dal momento che non si riesce a scendere sotto i 100ml a fronte di una
volemia di pari entità. Per cui il rischio di trattamento è elevatissimo perché bisogna prevedere o
una trasfusione totale o un dimezzamento del valore di ematocrito.
Un miglioramento della tecnica si può ottenere cambiando il punto di accesso e prelevando il
sangue dall’atrio destro per immetterlo in aorta; in questo modo si minimizzano gli sforzi sui vasi
sanguigni (fig 23).
Atrio Dx
1l/min
4l/min
ossigenatore
Pompa
AORTA
Figura 23: schema di funzionamento dell'ECMO,
5.1 La regolazione della FiO2
Per poter effettuare la regolazione dell’ossigenatore si agisce sulla composizione percentuale di
ossigeno nella miscela di gas.
Si riporta di seguito un esempio di calcolo: su una portata di sangue pari a 5l/min se ne prelevano
4l/min (pari all’80%) per essere ossigenati nell’ECMO. Il sangue prelevato ha le seguenti
caratteristiche:
PO2=40mmHg
PCO2=46mmHg
T=37°C
Ht=45% non a regime
che risultano uguali a quelle del sangue che non entra nel circolo artificiale (1l/min).
Il sangue ossigenato presenta invece i seguenti valori fisiologici:
PO2=100mmHg
PCO2=40mmHg
T=37°C
Ht= <45% a regime
Per quanto riguarda il valore dell’ematocrito risulta facile capire che il volume di soluzione
fisiologica che riempie l’impianto per il priming farà diminuire il valore di Ht iniziale; per cui
considerando un paziente di 70 Kg (volemia pari al 10% del BW) si ottiene un valore di Ht a regime
pari a:
Vpriming=Vox+Φt*Lt=300cc+0,00962/4*π*1,3=394cc
Htf= (Hti*Vol+Htp*Vpriming) /Vtot= (0,45*7+0*0,394)/7,394=0,42=42,6%
Dove Vpriming è il volume di priming della macchina, Vox è il volume dell’ossigenatore, Φt e Lt sono
il diametro e la lunghezza del tubo di connessione macchina-paziente, Hti e Htf rappresentano
l’ematocrito prima e durante il trattamento, Vol è la volemia del paziente, Htp è l’ematocrito della
soluzione fisiologica (pari a zero) e Vtot è la somma della volemia e del volume di priming.
Una volta ottenuto il dato sull’ematocrito che si instaura durante il trattamento è possibile stabilire
quale sia la pressione parziale di ossigeno presente nel sangue considerando che l’80% di esso è
ossigenato, mentre il 20% rimane venoso. Per eseguire questo calcolo si parte dai dati di PO2 del
sangue arterioso (100mmHg) e di quello venoso (40mmHg) e si inseriscono nel grafico relativo alla
curva di saturazione. In funzione dell’ematocrito si legge il valore di [O2] e si esegue la somma
pesata. Con questo dato a disposizione si legge nuovamente il valore di PO2 dopo la miscelazione
delle due componenti sanguigne. Nel caso in esame si conosce la [O2] arteriosa (20ml/dL) e venosa
(15mL/dl) al 45% di Ht. Con una semplice proporzione si perviene ai valori di concentrazione di
ossigeno corrispondenti al 42,6% di Ht: 19,9 ml/dL arteriosi e 14,2 ml/dL venosi. Si esegue la
somma pesata sulle portate e si ottiene un valore di [O2] finale pari a 19,96 ml/dL. Dal grafico si
legge una corrispondenza di questo valore di concentrazione con una pressione parziale di 90mmHg
che risulta più bassa di quella fisiologica.
A questo punto bisogna modificare un parametro nell’ossigenazione artificiale al fine di
raggiungere il target dei 100mmHg come pressione di O2 totale. Bisogna considerare che il gas
ossigenante è una miscela di aria (21% di O2) e O2 puro. Per questo motivo la pressione parziale di
ossigeno nella miscela, in funzione della sua percentuale di immissione nell’aria (FiO2,) risulta pari
a:
PO2=FiO2 *760mmHg+(1-FiO2) * 0,21 *760 mmHg o, in forma più semplificata,
PO2= FiO2 *760mmHg.
Quindi, un modo facile per regolare l’ossigenazione è modificare la FiO2. Nel caso in esame i 90
mmHg calcolati sono insufficienti e per questo serve giungere ad una concentrazione di ossigeno
finale che garantisca una PO2 pari a 100mmmHg; questo valore è pari a circa 19ml/dL come si
evince dal grafico della saturazione dell’Hb. Da questo dato si risale a ritroso al quantitativo di
ossigeno che deve essere presente nel solo sangue ossigenato (80%) per garantire i livelli di PO2
imposti:
(4*X+1*14,2)/5=19ml/dL
X=20,2 ml/dL
Per cui il ΔP che si instaura tra sangue arterioso e venoso si calcola come:
ΔPi=18,9-14,2=4,7 mmHg
ΔPf=20,2-14,2= 6 mmHg
dove il ΔPi è il salto pressorio tra il compartimento ematico e quello gassoso nelle condizioni non
ideali che garantiscono solo 90mmHg di PO2 finale, mentre il ΔPf è la differenza di pressione da
raggiungere per arrivare ai 100mmHg di PO2 imposti.
Supponendo che i 90 mmHg di PO2 si ottengano con una FiO2 pari al 50%, si deve calcolare la
nuova FiO2 per innalzare tale valore a 100mmHg.
Nel caso si ottengano 90 mmHg (situazione 1) si ha:
ΔP1=4,7mmHg
FiO2=50%
PO2gas1=380mmHg (formula semplice)
PO2sven=40mmHg
ΔPFick1=340mmHg
Nel caso si vogliano ottenere 100mmHg di PO2 finale si ha:
ΔP2=6mmHg
FiO2=???
PO2sven=40mmHg
Si imposta una proporzione:
340:4,7=X:6
X=452,1=ΔPFick2=PO2gas2-PO2sven=PO2gas2-40mmHg
PO2gas2=492,1 mmHg
Che corrispondono a una FiO2 del 65%.
Per quanto riguarda la regolazione dello scambio di CO2 i calcoli sono molto diversi dal momento
che nella miscela gassosa la PCO2 è pari a 0. Non
potendo ulteriormente diminuire questo valore
46 mmHg
ΔP
40 mmHg
per aumentare gli scambi, l’unico modo che resta
per regolare il quantitativo di CO2 prelevata al
sangue è quello di variare la portata di gas. Più Q
Figura 24: scambio di CO2 a flussi incrociati.
è elevata più si garantisce un prelievo maggiore
dal momento che si ha a disposizione meno tempo per riempire di anidride carbonica la miscela
(viene mantenuto costante il ΔP dei flussi incrociati) (fig.24).