Dinamica del Corpo Rigido
Corpo rigido
• È un caso particolare dei sistemi di
punti materiali
• È di grande importanza per le
applicazioni pratiche
• Un corpo è detto rigido se le distanze
tra tutte le possibili coppie di punti del
corpo non cambiano
2
Corpo rigido
• Astrazione che si applica tanto meglio
quanto più i corpi sono indeformabili
• Un corpo perfettamente rigido non
esiste
• Dal punto di vista microscopico la
rigidità dei solidi è dovuta a forze di
natura elettrica tra gli atomi costituenti
3
Moto del corpo rigido
• È determinato da una o più forze esterne,
generalmente applicate in punti diversi del
corpo
• Le forze sono quindi caratterizzate da una
forza risultante F e da un momento risultante t
• Il lavoro delle forze interne in un corpo rigido è
nullo quindi la variazione dell’energia cinetica
è uguale al lavoro delle forze esterne
4
Moto del corpo rigido
• Le leggi fondamentali sono le equazioni
cardinali della meccanica
F MaCM
dL
t
dt
• Si può anche usare la conservazione
dell’energia meccanica nel caso in cui le
forze in gioco siano conservative o si abbia
attrito statico
E 0
5
Equilibrio statico del corpo rigido
• Un corpo rigido è in equilibrio statico se
e solo se:
– è inizialmente in quiete:
– P e L non variano nel tempo
P0
L0
dP
0
dt
dL
0
dt
6
Equilibrio statico del corpo rigido
• Dalla prima eq. segue che
• Dalla seconda che
F 0
t 0
• Il momento è indipendente dal polo scelto e
quindi il polo può essere un punto qualunque
7
Traslazione di un corpo rigido
• Tutti i punti descrivono traiettorie uguali, in
genere curvilinee, con la stessa velocità, in
genere varia
• Ogni punto ha lo stesso moto del CM: la
conoscenza del moto del CM basta per
conoscere il moto di tutti i punti del corpo
• Gli assi del sistema solidale col corpo
rimangono sempre paralleli a quelli del SCM
8
Traslazione di un corpo rigido
• QM ed energia cinetica del corpo rigido:
P MvCM
1
2
K MvCM
2
• L’equazione del moto del CM è
F MaCM
• Il momento angolare è:
L rCM MvCM rCM P
9
Rotazione di un corpo rigido
• Ogni punto descrive un moto circolare, la
traiettoria è un arco di circonferenza, di
raggio diverso per ogni punto considerato,
ma con centro su una stessa retta, detta asse
di rotazione
• La rigidità del corpo implica che tutti i punti
abbiano la stessa velocita` angolare w in un
dato istante, parallela all’asse di rotazione
10
Rotazione di un corpo rigido
• Se l’asse è fisso nel tempo w puo` cambiare
solo in modulo e verso
• Nel caso più generale w puo` cambiare anche
in direzione (asse di rotazione variabile)
11
Moto di un corpo rigido
• Traslazione e rotazione sono i moti più
importanti, in quanto vale il seguente teorema
di meccanica razionale:
ogni spostamento infinitesimo puo` sempre
essere considerato come somma di una
traslazione e di una rotazione infinitesime con
velocita` v e w variabili nel tempo
12
Moto di un corpo rigido
• Per descrivere una rototraslazione si utilizzano
le equazioni cardinali:
– il teorema del moto del CM
– il teorema del momento angolare
• In una rototraslazione le velocita` v e w sono, in
generale, indipendenti
• In situazioni in cui è presente un vincolo le due
velocita` possono essere legate da una
relazione che elimina tale indipendenza
(rotolamento puro)
13
w
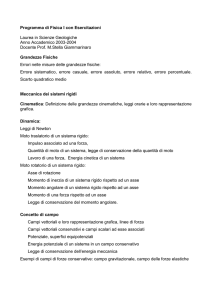
Momento angolare di un
corpo rigido in rotazione
ri
ri zi vi
O
• Calcoliamo il momento angolare di un corpo esteso in
rotazione attorno ad un asse, supposto inizialmente
fisso, con velocita` angolare w, rispetto al polo O
scelto sull’asse
L ri mi vi mi ri w ri
i
i
• Scomponiamo ri(t) lungo l’asse z di rotazione e della
direzione ad esso perpendicolare
ri t zi ri
ri xi , yi
14
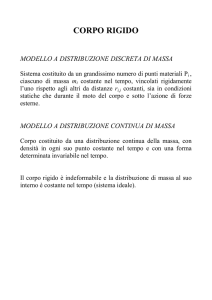
Momento angolare di un corpo
rigido in rotazione
w
ri
ri
zi
vi
O
15
Scomposizione del momento
angolare
L ri mi vi mi zi ri w zi ri
i
i
L mi ri ziw w ri ziw
i
L mi ri ziw w ri w ziw
i
L mi ri ziw w ri 0
i
L mi ri w ri mi ziw w ri
i
i
16
Momento angolare di un corpo
rigido in rotazione
L mi ri w ri m j z jw w r j
i
j
ri w ri ri w
2
w w r j r jw
2
L mi ri w m j z j r j w L// L
i
j
17
Momento angolare
• Il termine longitudinale è proporzionale al
vettore velocita` angolare
2
2
2
L// mi ri w mi xi yi w I w
i
i
• La costante di proporzionalità è detta
momento d’inerzia del corpo rispetto all’asse
di rotazione scelto
– è indipendente dalla posizione del polo sull’asse
(r non dipende dalla posizione di O)
– è indipendente dal tempo (r non dipende da t
18
perchè il corpo è rigido)
Momento angolare trasversale
• Il termine trasversale
L w mk zk xk i yk j w mk zk rk
k
k
– dipende dal tempo (tramite x e y oppure rl)
– dipende dalla posizione del polo sull’asse (tramite z)
• quindi non ci piace tanto perchè ci complica
notevolmente la vita
• Questo termine è 0 quando l’asse di rotazione
– è un asse di simmetria della distribuzione di massa
del corpo (allora per ogni punto x,y,z esiste un punto
-x,-y,z che compensa il primo)
– è un asse principale d’inerzia (vedi oltre)
19
Momento d’inerzia
• Per definire il momento d’inerzia di un corpo,
bisogna conoscerne la distribuzione di
massa, cioè la distanza degli elementi di
massa dall’asse attorno a cui ruota
I mi xi2 yi2 mi ri2
i
i
• Per una distribuzione continua di massa
I
x
Vcorpo
2
y dm
2
Vcorpo
r dm
2
20
Momento d’inerzia
• Ne segue che cambiando l’asse di rotazione,
cambia il momento d’inerzia, cioè la costante
(indipendente dal tempo!) che lega il momento
angolare longitudinale alla velocità angolare
• I è una grandezza scalare estensiva, cioè tale
che per un sistema scomponibile in parti, può
essere calcolata come somma dei contributi
delle singole parti
• non è una proprietà intrinseca del corpo,
perchè dipende rispetto a quale asse si calcola
21
Assi principali d’inerzia
• Teorema di Poinsot (senza dimostrazione):
– dato un corpo rigido qualunque, comunque venga
scelto un punto O, è sempre possibile trovare tre
direzioni mutuamente ortogonali passanti per O, per
ognuna delle quali L è parallelo a w
• Questi assi sono detti assi principali d’inerzia
• Se O coincide con il CM, gli assi si dicono assi
centrali d’inerzia
22
Calcolo del momento d’inerzia
• Asta omogenea
• Disco omogeneo
• Sfera omogenea
23
Esempi di calcolo del Momento di inerzia
Momento d’inerzia di un asta omogenea di lunghezza l e massa M:
i) rispetto ad un asse perpendicolare passante per un suo estremo :
z
dm
x
Iz
x 2 dm x 2 dx
Corpo
0
3
densità
lineare
x
3
M 2
Iz
3
M
dm
dx
Esempi di calcolo del Momento di inerzia
Momento d’inerzia di un asta omogenea di lunghezza l e massa M:
ii) rispetto ad un asse perpendicolare passante per il suo centro di massa :
z
G
/ 2
/2
2
2
I z 2 x dx
24
0
dm
x
3
x
M
Iz
12
2
Esempi di calcolo di momenti di inerzia
i)
Momento d’inerzia di un disco omogeneo di raggio R e massa M rispetto
all’asse perpendicolare passante per il suo centro di massa :
dr
dm dS 2rdr
z
dm 2 rdr
G
densità
superficiale
r
R
R
2
r
R
M
2
M 2 2
R
2
2
2
R
0
2
2 R
2
2
r dm r 2 rdr
4
Corpo
0
R
I zG
4
R R
2
2
2
MR 2
2
Esempi di calcolo di momenti di inerzia
ii) Momento d’inerzia di una sfera omogenea di raggio R e massa M :
z
r ( z) R z
2
2
Rotazione semicirconferenza
di raggio R
dM r dV r r 2 z dz
dz
R
r
M
4
R3
3
m.i. disco infinitesimo
1 2
dI r dM
2
1 2
1
2
4
dI r r r dz r r dz
2
2
Esempi di calcolo di momenti di inerzia
ii) Momento d’inerzia di una sfera omogenea di raggio R e massa M :
z
r ( z) R 2 z 2
dz
R
1
2
2 2
I G dI 2 r ( R z ) dz
R
2
0
R
R
R
I G r R 2 R z z dz
4
2 2
4
0
5 2 5 R5
8
5
r R R
r
R
15
3
5
IG
2
2
MR
5
Come facilitare il calcolo del
momento d’inerzia
• I calcoli più semplici sono quelli per assi
di rotazione coincidenti con assi di
simmetria passanti per il CM
• Per assi paralleli a questi assi, esiste un
teorema che permette di calcolare
semplicemente i momenti d’inerzia
relativi
29
Teorema di Huygens-Steiner
• Detto I il momento d’inerzia di un corpo
di massa m, rispetto ad un asse a
passante per il CM, il momento d’inerzia
rispetto ad un asse a’ parallelo al primo
e distante d da questo e`
a’
a
I ' I md
2
CM
d
30
Teorema di Huygens-Steiner
• Detto P il generico punto
del corpo, tracciamo il
piano passante per P e
perpendicolare ai due assi
paralleli
• Sia r la distanza di P
dall’asse a e r’ la distanza
di P dall’asse a’
• Vale la relazione r ' r d
a’
a
r
r’
P
d
CM
31
Dimostrazione del teorema di
Huygens-Steiner
• Il momento d’inerzia rispetto ad a’ è
I'
corpo
corpo
r d
r ' dm
2
r 2 dm 2d
2
dm
corpo
r dm d 2
corpo
dm
corpo
I 2d mrCM md 2
• Il secondo termine è nullo, in quanto il
centro di massa appartiene all’asse a
2
I ' I md
• quindi
32
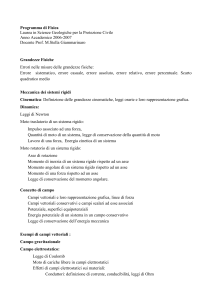
Esempi di applicazione del teorema di Steiner :
z’
z
d /2
G
dm
I z I z 'CM Md
2
2
M
M
M
2
12
3
2
2
Esempi di applicazione del teorema di Steiner :
Momento d’inerzia di un disco omogeneo di massa M e raggio R rispetto ad un
asse ad esso perpendicolare passante per un punto P sul suo bordo :
z’
z
P
d=R
G
I z P I z 'CM Md
MR
2
2
MR
2
2
3 MR
2
2
Energia cinetica di rotazione
• Partendo dalla definizione di K
1
1
1
1 2
2
2 2
2 2
K mi vi miw ri mi ri w Iw
2 i
2
i 2
i 2
• Ricordando che L// I w
• Possiamo scrivere
2
//
1 2 1
1L
K Iw L//w
2
2
2 I
• L’energia cinetica di rotazione dipende dal momento
d’inerzia rispetto all’asse di rotazione, ovvero dal
momento angolare longitudinale
35
Teorema di Koenig
Corpo in rotazione intorno all’asse z
w
z
z’
d
vG
G
vG = wd
t. di Huygens-Steiner
1
1
2
Ek I zw ( I z ' Md 2 )w 2
2
2
1
1
2
I z 'w M ( d w ) 2
2
2
1
1
2
2
E k I z 'w MvG
2
2
36
Lavoro forze esterne
• In seguito all’azione di un momento esterno,
la velocità angolare di un corpo viene portata
dal valore iniziale w1 a quello finale w2
• Per il teorema dell’energia cinetica, la
variazione di K è uguale al lavoro delle forze
agenti sul sistema
• Per un corpo rigido, solo le forze esterne
danno un contributo
K W
E
37
Lavoro e potenza
• In termini infinitesimi
d
1 2
dK d Iw Iwdw I
dt Id t // d dW E
dt
2
• Integrando gli ultimi due membri otteniamo il lavoro
come integrale del momento nella variabile angolare
t
F
d dW W
E
//
0
E
I
• Esprimiamo la potenza in funzione del momento e
della velocita` angolare
dW
d
P
t //
t //w
dt
dt
E
38
Rotazione intorno ad un asse
fisso
• È un caso particolare di grande importanza
pratica nello studio di macchine e motori
• Il vettore w ha la direzione fissa dell’asse,
mentre modulo e verso possono cambiare nel
tempo
• Se w non è costante, il vettore accelerazione
angolare
dw
dt
• è diverso da zero e diretto lungo l’asse
39
Rotazione con asse fisso e
L // w
• Il caso più semplice è quello in cui il momento
angolare è parallelo all’asse, ovvero la componente
trasversale e` nulla; in tal caso
L Iw
• L puo` variare in modulo e verso, ma non in
direzione, quindi la sua derivata è parallela a w
• Quindi, il teorema del momento angolare impone
che il momento delle forze t che fa variare L sia
anch’esso parallelo
aw
dL//
dL
t
t //
I
dt
dt
40
Rotazione con asse fisso e
L // w
• Risolvendo
l’equazione
all’accelerazione
rispetto
dw t //
dt
I
• Noto il momento, si può ricercare l’integrale
primo del moto
t
t
w t w 0 dt
0
0
t //
I
dt
• In particolare se il momento è costante
w t w 0
t //
I
t
41
Slittamento
• Immaginiamo un corpo cilindrico o sferico in
moto rispetto alla superficie di appoggio
C
• Se le velocità di tutti i punti sono uguali e
sono parallele al piano tangente localmente
alla superficie, abbiamo un moto di
traslazione e il corpo slitta sulla superficie
42
Rotolamento
• In generale un corpo rotola sulla
superficie
• Se il punto di contatto C tra corpo e
superficie è fermo, istante per istante, si
ha rotolamento puro
• Altrimenti avremo contemporaneamente
slittamento e rotolamento
43
Rotolamento puro
• Tra superficie e corpo esiste una forza
di attrito che mantiene fermo il punto di
contatto C, istante per istante
• La velocità del punto C (o di qualsiasi
altro punto) a distanza r dal CM è
(composizione delle velocità)
vC vCM v vCM w r
*
C
44
Rotolamento puro
• La condizione di puro rotolamento è vC 0
vCM w r
• ovvero
• In modulo la velocità del CM è
• E l’accelerazione
aCM r
vCM wr
• Cioè nel moto di puro rotolamento esiste una
relazione precisa tra velocità del CM e
velocità angolare
45
Rotolamento puro
• A questo moto si può applicare la legge di
conservazione dell’energia meccanica
• Questo è possibile perché la forza d’attrito
agisce sul punto di contatto, che è fermo, e
quindi non compie lavoro
• Nuovamente questo è un caso limite: un
corpo libero che rotola su un piano
orizzontale, presto o tardi si arresta
46
Attrito volvente
• Si modellizza questo fenomeno con
una nuova forma di attrito, detto
volvente, che è attivo tra il corpo e
la superficie di appoggio
• È causato dalla deformazione
locale del corpo e della superficie
• Per una ruota in moto, la retta
d’azione della componente normale
N della reazione vincolare alla
superficie d’appoggio non contiene
il centro della ruota
N
h
47
Attrito volvente
• L’effetto è modellizzato da un momento che
si oppone al moto
t v hN
• h è il braccio di N ed è detto coefficiente di
attrito volvente)
• L’effetto dell’attrito volvente è sempre molto
minore di quello dell’attrito radente e statico,
per cui è generalmente trascurabile
• Da qui deriva il grande vantaggio che si
ottiene, in molti casi, di dotare i veicoli di
48
ruote piuttosto che di pattini
Moto di rotolamento
• Consideriamo un corpo di massa m e raggio r
che rotola su una superficie piana orizzontale
sotto l’azione di una forza F costante applicata
F
all’asse
y
N W
• Sul corpo agiscono anche la forza
peso W e la reazione del vincolo R
x
A
• R si scompone in una forza normale al vincolo
N e una forza di attrito A parallela al vincolo
• A deve opporsi al moto del punto di contatto
verso +x e quindi dev’essere diretta verso -x
49
Moto di rotolamento
• Dalla 1a equazione cardinale:
F A W N maCM
• che proiettata lungo x e y dà
F A maCM
W N 0
• dato che l’accelerazione è diversa da zero
solo lungo x, mentre è nulla lungo y
• La seconda equazione
permette di trovare N:
N W
• La prima equazione contiene l’incognita aCM
50
e la forza d’attrito A
Moto di rotolamento
• Dalla 2a equazione cardinale:
dLw
tw
dt
• Scelto il CM come polo si ha:
d
rA Iw I
dt
51
Moto di rotolamento
• Questa equazione contiene l’incognita e la
forza d’attrito A
• Distinguiamo due casi:
• attrito statico:
A Amax s N
• attrito dinamico:
A d N
52
Moto di rotolamento puro
• In totale abbiamo due equazioni e tre incognite
F A maCM
rA I
• Con la condizione di rotolamento:
• Risolvendo per le incognite:
Fr 2
Fr
aCM
2
2
I mr
I mr
aCM r
FI
A
I mr 2
53
Sfera che rotola su piano
inclinato
54
Sfera che rotola su piano
inclinato
55
Sfera che rotola su piano
inclinato - Energia
Mgh KCM
2 gh v
2
CM
2
CM
2
1
1 2 1
1 v
2
2
MvCM I w MvCM I
2
2
2
2 R
I
1
2
MR
I sfera
2 I cilindro 1
;
2
2
MR
5 MR
2
10
2 7
2
2 gh vCM vCM gh
sfera
7
5
cilindro 2 gh v 2 3 v 2 4 gh
CM
CM
3
2
56
Pendolo fisico
• E` un qualunque corpo rigido oscillante
attorno ad un asse orizzontale (non passante
per il CM)
• Consideriamo la sezione del corpo
perpendicolare all’asse e contenente il CM
• Sia O la traccia dell’asse di rotazione
e r la distanza di O dal CM, W il
peso del corpo e l’angolo formato
dal
da r con la verticale
O
r
CM
W
57
Pendolo fisico
• L’asse è vincolato a rimanere fisso, esisterà
quindi una forza vincolare V che agisce sul
corpo
• Come ogni forza vincolare, essa è, a priori,
incognita e sarà determinata a posteriori
dopo aver risolto l’equazione del moto
• Scegliamo un sistema di coordinate
cilindriche con origine O, asse polare
verticale e asse z = asse di rotazione
con verso uscente dal foglio
V
O
r
CM
W
58
Pendolo fisico
• Le componenti del peso sono
Wr W cos
W W sin
• Le componenti della forza
vincolare
Vr , V
• Entrambe le forze hanno
componente z nulla
V
V
Vr
O
r
CM
Wr
W
W
59
Pendolo fisico
• Scegliamo O come polo per il calcolo dei
momenti: questo è conveniente perche’ la
forza vincolare incognita ha momento nullo
rispetto a O e il momento risultante t è
uguale al momento della forza peso
t r W
• Applichiamo al corpo le equazioni cardinali
Fe W V Ma
CM
dL
t
dt
60
Pendolo fisico
• Per i momenti si ha:
dLz
tz
dt
• Note le espressioni del momento di forza e del
momento angolare
t z rW rW sin
Si ha:
Lz Iw
d
dw
d 2
rW sin Iw I
I 2
dt
dt
dt
• da cui si ricava la legge oraria (t)
61
Pendolo fisico
• Per le forze abbiamo le due equazioni
d
CM
2
Wr Vr Mar
Mw r Mr
dt
2
2
d
w
d
CM
W V Ma
M
r Mr 2
dt
dt
che ci servono per trovare le componenti della
reazione vincolare
d
Vr Wr Mr
dt
d 2
V W Mr 2
dt
2
62
Pendolo fisico
• Risolviamo ora l’equazione differenziale per (t)
d 2
rW
sin
2
dt
I
• Per piccole oscillazioni possiamo confondere il
seno con l’arco, ottenendo
d 2
rW
2
W
t Asen Wt
2
dt
I
• Equazione del moto armonico con pulsazione W
e periodo
2
I
I
l*
T
2
2
2
63
W
rW
Mgr
g
Moto di slittamento
• Nel caso di slittamento abbiamo solo due
equazioni, ma anche solo due incognite
perché siamo in regime di attrito dinamico in
cui:
A N W
d
d
• Risolvendo per le incognite:
aCM
F dW
m
r d W
I
64
Moto di rotolamento puro
• Quand’è possibile il rotolamento puro?
Occorre che la soluzione trovata per A sia
minore del valore statico massimo
FI
A
s N
2
I mr
• Questo impone un limite al valore di F:
I mr
F sW
I
2
65
Moto di rotolamento
• Il corpo sia ora sotto l’azione di un momento
costante t applicato all’asse (entrante nel
foglio)
• Quanto detto prima per la reazione del vincolo
R continua a valere, eccetto che ora la forza
d’attrito deve opporsi al moto del punto di
contatto verso -x e quindi dev’essere rivolta
verso +x
y
t
N
W
A
x
66
Moto di rotolamento
• 1a equazione cardinale:
A W N maCM
• che proiettata lungo x e y dà
A maCM
W N 0
• Di nuovo la seconda equazione permette di
trovare N:
N W
segue che quando un motore fa
• Dalla prima
girare una ruota, è la forza d’attrito a spingere67
avanti la ruota
Moto di rotolamento
• 2a equazione cardinale:
dLw
tw
dt
• Scelto il CM come polo
d
t rA Iw I
dt
• Distinguiamo, come prima, due casi.
68
Moto di rotolamento puro
• Nel caso di rotolamento puro abbiamo tre
incognite e la solita relazione tra aCM e .
• Possiamo quindi risolvere le equazioni di prima
e trovare le incognite:
t mr
tr
t
A
aCM
2
2
2
I
mr
I mr
I mr
69
Moto di rotolamento
• Nel caso di slittamento abbiamo due
incognite e due equazioni
• Possiamo risolverle trovando:
aCM
sW
m
t r sW
I
70
Moto di rotolamento puro
• Quand’è possibile il rotolamento puro?
Occorre che la soluzione trovata per A sia
minore del valore statico massimo
t mr
A
s N
2
I mr
• Questo impone un limite al valore di t:
I mr
t sW
mr
2
71