OSCILLAZIONI
1
Moto periodico
Per moto periodico intendiamo un moto che si ripete ad intervalli regolari di tempo.
Per esempio il moto illustrato nell’esempio di seguito, che rientra fra quelli che abbiamo
già visitato, è certamente un moto periodico:
Vedremo nel seguito di studiare in dettaglio alcuni casi esemplificativi del moto periodo
procedendo quindi verso lo studio delle cosiddette «oscillazioni» e delle grandezze
fisiche che le caratterizzano e che sono propedeutiche allo studio dei fenomeni ondulatori
2
Altri esempi di moto periodico che ci sono familiari
• Il moto del pendolo
3
• La vibrazione di una corda di violino
4
• La rotazione della terra attorno al proprio asse
5
• Il moto circolare uniforme
6
• Il moto di una massa attaccata ad una molla
7
Nella realtà, molti dei moti periodici a noi noti sono solo approssimativamente
periodici a causa dell’azione delle forze d’attrito che dissipano l’energia del moto
• Il pendolo smette gradualmente di oscillare
• La corda di violino smette di vibrare
• Etc…
In questi casi il moto viene detto moto periodico smorzato
Nel moto periodico ne la velocità ne l’accelerazione sono costanti
(Nel caso del moto circolare uniforme lo sono ma solo in modulo)
8
• Se il moto va avanti e indietro lungo lo stesso percorso, viene detto:
Moto oscillatorio o vibratorio
• Un ciclo completo del moto si chiama oscillazione o vibrazione
• Il tempo speso per effettuare una oscillazione completa è denominato Periodo T
• La frequenza
f
è il numero di oscillazioni che occorrono nell’unità di tempo
• Quindi:
f = 1/T
• La posizione in cui nessuna forza agisce sul corpo è denominata posizione di equilibrio
• L’elongazione (lineare o angolare) è la distanza (lineare o angolare) dalla
posizione di equilibrio ad ogni istante
• L’ampiezza A del moto è l’elongazione massima
9
L’oscillatore armonico
Se una particella vibra (oscilla) attorno ad una posizione di equilibrio sotto l’azione
di una forza proporzionale alla elongazione, il suo moto viene detto armonico
Questa forza di richiamo è sempre diretta verso la posizione di equilibrio e dà origine
al tipo più semplice di moto armonico
L’esempio classico di oscillatore armonico lo abbiamo già visitato ed è costituito da una
massa m legata ad una molla priva di massa e di costante elastica k, disposta su un piano
senza attrito. Supponendo che il moto avvenga lungo x e che la posizione di riposo
coincida con l’origine O, quando la massa di trova su un punto di coordinata
x la forza
esercitata su d essa dalla mola è data dalla:
F = −kx
10
Ricordiamo che il segno negativo indica il fatto che se l’elongazione è nel verso positivo
dell’asse x, la forza della molla agisce nel verso negativo, e viceversa, cioè la forza è diretta
sempre verso la posizione di equilibrio.
O
x
11
Applichiamo la II Legge di Newton a questo sistema:
F= ma
per la forza
F scriveremo:
F = –k x
e per l’accelerazione a scriveremo:
𝑑2𝑥
a= 2
𝑑𝑡
Quindi:
F = ma
𝑑2𝑥
–k x = m 2
𝑑𝑡
𝑑2𝑥
m 2
𝑑𝑡
+ kx =0
12
Questa equazione differenziale:
𝑑2𝑥
m 2
𝑑𝑡
+ kx =0
è l’equazione del moto di un oscillatore armonico.
Questa è una equazione di grande importanza in fisica, sia perché interviene in
ogni problema connesso a vibrazioni meccaniche, sia perché un gran numero di
fenomeni fisici sono governati da questa stessa equazione in acustica, in ottica
nei circuiti elettrici, etc…
13
La legge di Hooke ha una sua formulazione generale, di cui il caso della molla è
semplicemente un caso particolare:
Hooke: Quando un solido viene deformato, esso si oppone alla
deformazione con una forza proporzionale all’entità della
deformazione stessa, purché questa non sia troppo grande.
Quando questo limite (che dipende dalle caratteristiche di elasticità del solido) viene
superato, si passa dal comportamento elastico al comportamento plastico: un corpo
che subisce una deformazione elastica tende a riacquisire la sua forma, un corpo che
subisce una deformazione plastica, rimane deformato. Se su un corpo soggetto a
deformazione plastica continua ad insistere una forza esterna superiore ad un certo
limite, il corpo può andare incontro alla frattura definitiva.
14
15
Nel caso unidimensionale, la Legge di Hooke si riduce come abbiamo già visto, alla
semplice formula che abbiamo già visitato:
F = −k x
dove abbiamo visto che:
•
x rappresenta la deformazione, cioè l’allungamento o la
compressione rispetto
alla posizione non deformata.
• F è la resistenza offerta dal solido
• k è la costante elastica del solido
• Il segno negativo tiene conto del fatto che F si oppone alla deformazione
16
Pertanto, un solido deformato elasticamente possiede una certa energia potenziale U
data dalla relazione:
U = ½ k x2
Per il solido non deformato (x
= 0) l’energia potenziale è minima e quindi x = 0 è una
posizione di equilibrio stabile
17
La forza di richiamo e l’energia potenziale di un corpo elastico e di un oscillatore
armonico sono esattamente le stesse (finché siamo nel limite di elasticità). Quindi
un solido deformato elasticamente comincerà a vibrare esattamente come l’oscillatore
armonico. Le corde vibranti, le vibrazioni sonore, per le oscillazioni elettriche,
manifestano lo stesso moto armonico e cioè sono descritte tutte dalle stesse equazioni
dell’oscillatore armonico.
Nel caso esemplificativo del moto armonico, e cioè l’oscillatore armonico,
k è la costante
di elasticità della molla; in altri sistemi oscillanti k potrà essere connessa ad altre
caratteristiche del sistema in esame, che vanno analizzate caso per caso.
L’oscillatore armonico (cioè il sistema massa-molla) costituisce il nostro prototipo per lo
studio del moto armonico
18
Il moto armonico
Adesso risolviamo quindi l’equazione:
𝑑2𝑥
m 2
𝑑𝑡
+ kx =0
Questa è una equazione differenziale. Dobbiamo cioè trovare una funzione x(t) che
soddisfi a questa relazione.
Riscriviamola nella forma:
𝑑2𝑥
𝑘
=−
x
2
𝑑𝑡
𝑚
Cioè: stiamo cercando una funzione
x(t)
tale che la sua derivata seconda sia equale
alla funzione stessa cambiata di segno, a parte un fattore moltiplicativo k
/m
19
Dall’analisi matematica, sappiamo che le funzioni seno e coseno hanno questa proprietà,
in particolare:
𝑑
cos t = − sin t
𝑑𝑡
𝑑2
2 cos t
𝑑𝑡
𝑑
=
(− sin t )
𝑑𝑡
𝑑2
2 cos t
𝑑𝑡
= − cos t
Cioè: la derivata seconda di una funzione coseno è eguale alla funzione stessa cambiata di
segno. Questa proprietà vale anche per la funzione seno.
Tenuto conto che la nostra equazione contiene un fattore costante, possiamo valutare
come tentativo per la funzione che cerchiamo una funzione del tipo:
x (t) = A cos (ωt + δ)
20
E’ interessante notare che una funzione coseno scritta in questa forma generale:
A cos (ωt + δ)
rappresenta di fatto una generica combinazione lineare di funzioni seno e coseno
e rappresenta quindi una soluzione del tutto generale.
Infatti:
cos (θ + δ) = cos δ cos θ − sin δ sin θ = a cos θ + b sin θ
Generica combinazione lineare di funzioni seno e coseno
21
Consideriamo quindi la soluzione
x (t) = A cos (ωt + δ)
e calcoliamone la derivata seconda:
𝑑𝑥
= −ωA sin (ωt + δ)
𝑑𝑡
𝑑2𝑥
2
2 = −ω A cos (ωt + δ)
𝑑𝑡
Introducendo la derivata seconda nell’equazione differenziale:
𝑑2𝑥
𝑘
=−
x
2
𝑑𝑡
𝑚
abbiamo:
−ω2A
𝑘
cos (ωt + δ) = − A cos (ωt + δ)
𝑚
22
In questa relazione:
𝑘
cos (ωt + δ) = − A cos (ωt + δ)
𝑚
se scegliamo la costante ω in modo che sia:
ω2 = k / m
−ω2A
si ha un’identità, e cioè la funzione prescelta:
x (t) = A cos (ωt + δ)
è una soluzione dell’oscillatore armonico.
In tutto questo, A e δ risultano indeterminati, cioè qualsiasi coppia di valori di A e δ
risulta in una possibile soluzione del moto dell’oscillatore armonico, che infatti presenta
una grande varietà di moti. Quindi, ω è comune a tutti i moto permessi per un dato
oscillatore di massa m e costante elastica k, mentre come vedremo A e δ dipendono di
volta in volta dalla condizioni iniziali del moto.
23
Vediamo adesso di capire il significato fisico della costante ω :
Se nella funzione
x (t) = A cos (ωt + δ)
il tempo t aumenta della quantità Δ t =
2π / ω si ha:
x (t) = A cos (ωt + δ) x (t) = A cos (ω[t + 2π / ω] + δ)
= A cos (ωt + 2π + δ) = A cos (ωt + δ)
Cioè: la funzione si ripete identica dopo un tempo pari a 2π
Cioè: 2π
/ ω è il periodo T di ripetizione del moto,
/ω
e poiché si era posto ω2
= k/m
si ha:
T = 2π / ω = 2π √(m / k)
24
Quindi: tutti i moti regolati dall’equazione
𝑑2𝑥
𝑘
=−
x
2
𝑑𝑡
𝑚
hanno lo stesso periodo di ripetizione T , che dipende solo dalla massa m e dalla costante
elastica
k secondo la
T = 2π
𝑚
𝑘
La frequenza dell’oscillatore, cioè il numero di vibrazioni compiute nell’unità di tempo è
data dalla:
1
f=
𝑇
=
𝜔
2π
=
1
2π
𝑘
𝑚
E di conseguenza:
ω = 2π f = 2π / T
25
La quantità
ω = 2π / T
è denominata frequenza angolare (o pulsazione) e ha le
dimensioni di una velocità angolare, quindi la sua
unità di misura è il radiante/sec
La quantità
A nella funzione x (t) = A cos (ωt + δ) ha un semplice significato fisico:
la funzione coseno assume valori fra −1 e 1. Quindi l’elongazione x ha il suo valore massimo
proprio nel valore A. Cioè A è l’ampiezza del moto e poiché A non è determinata dalla
equazione differenziale, né dai parametri del sistema (m e k), ma solo dalle condizioni
Inziali, un dato oscillatore puo oscillare con varie ampiezze.
Cioè: il periodo di oscillazione di un oscillatore armonico non dipende dalla ampiezza del moto
26
La quantità
(ωt + δ)
è denominata fase del moto. La costante δ è la costante di fase
Due moti di un dato oscillatore possono avere la stessa ampiezza e frequenza e costante di
fase differente, che dipenda dalla elongazione iniziale.
QUINDI in un oscillatore armonico:
Il periodo di ripetizione è determinato dai parametri dell’oscillatore (m e k)
L’ampiezza e la costante di fase del moto sono determinate dalle condizioni inziali
della particella oscillante (ampiezza dell’elongazione inziale e velocità iniziale)
27
Un aspetto caratteristico del moto armonico è la relazione fra l’elongazione, la
velocità e l’accelerazione istantanee:
x (t) = A cos (ωt + δ)
𝑑𝑥
v (t) =
= −ωA sin (ωt + δ)
𝑑𝑡
𝑑2𝑥
2A cos (ωt + δ)
a (t) =
=
−ω
𝑑𝑡2
28
Considerazioni energetiche
L’oscillatore armonico è un sistema conservativo in quanto la forza in gioco è solo
funzione della posizione:
F = −k x
U = ½ k x2
e risulta pertanto
F = − dU / dx
In assenza di forze dissipative, l’energia meccanica si conserva. Naturalmente sia
l’energia cinetica K che l’energia potenziale U variano continuamente durante
l’oscillazione, ma la loro somma si conserva come dimostreremo di seguito.
29
L’energia cinetica K ad ogni istante vale ½
m v2.
Tenuto conto che come abbiamo visto:
𝑑𝑥
v (t) =
= −ωA sin (ωt + δ)
𝑑𝑡
si ha:
K = ½ m ω2A2 sin2 (ωt + δ)
e poiché come abbiamo visto in precedenza
ω2 = k / m
si ha:
K = ½ k A2 sin2 (ωt + δ)
Quindi: L’energia cinetica varia nel tempo con andamento pari al quadrato del seno e ha
come valore massimo
½ k A2
30
L’energia potenziale
U ad ogni istante vale ½ k x2
e poiché
x (t) = A cos (ωt + δ)
si ha:
U = ½ k A2 cos2 (ωt + δ)
Quindi: L’energia potenziale varia nel tempo con andamento pari al quadrato del
coseno e ha come valore massimo
½ k A2
Kmax = Umax = ½ k A2
Cioè:
Ci aspettiamo quindi:
E = K + U = ½ k A2
Infatti:
E = K + U = ½ k A2 sin2 (ωt + δ) + ½ k A2 cos2 (ωt + δ)
E = K + U = ½ k A2 [sin2 (ωt + δ) + cos2 (ωt + δ)]
E = K + U = ½ k A2
31
Il risultato è quindi che:
E = K + U = ½ m v2 + ½ k x2 = ½ k A2
L’energia meccanica totale di una particella in moto armonico è
proporzionale al quadrato dell’ampiezza del moto
32
Alcune applicazioni del moto armonico
33
Il pendolo semplice
Il pendolo semplice è un sistema costituito da una massa puntiforme sospesa ad
un filo inestendibile. Quando viene spostata dalla sua posizione di equilibrio,
e abbandonato a se stesso, il pendolo oscilla in un piano verticale sotto l’azione
della forza di gravità. Il moto del pendolo è periodico e vogliamo calcolarne il periodo T
34
Riconsideriamo la geometria del sistema e definiamo gli assi di riferimento e le forze in gioco.
La massa vale m e il filo di lunghezza
l forma un angolo θ
con la verticale. Le forze che
agiscono sulla massa m sono la forza di gravità mg diretta in verticale verso il basso e T,
la tensione del filo. Scegliamo una coppia di assi cartesiani diretti uno verso il raggio e uno
verso la tangente al cerchio su cui si muove la massa. Scomponiamo mg in una componente
radiale mg
cos θ e una componente tangenziale mg sin θ
35
La componente radiale e la tensione del filo istante per istante sono uguali e contrarie
e infatti non c’è moto della massa m in senso radiale. La componente tangenziale
è la forza di richiamo esercitata su m tendente e ricondurla alla sua posizione di equilibrio.
La forza di richiamo pertanto è:
F = −m g sin θ
NOTA: la forza F non è proporzionale allo spostamento angolare θ ma a sin
θ
Il moto che ne risulta quindi NON è armonico
Tuttavia, se θ è piccolo
sin θ ≈ θ , dove θ
lungo l’arco di cerchio è x
=lθ
è espresso in radianti. Lo spostamento
e per piccoli angoli il moto è praticamente rettilineo
36
Quindi: assumendo
sin θ ≈ θ
si ha
𝑥
F = −m g θ = −m g
𝑙
=−
𝑚𝑔
x
𝑙
Questa è proprio la condizione di applicazione delle formula del moto armonico
F = −k x
𝑚𝑔
k=
𝑙
in cui
Quindi: per piccole oscillazioni, il periodo
T = 2π
𝑚
= 2π
𝑘
T del pendolo semplice
𝑙
𝑔
vale:
non dipende dalla massa m
37
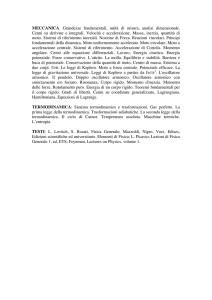
Il pendolo di torsione
Q
O
P
O
P
Supponiamo di avere un disco sospeso per il suo cento di massa da un filo. Il filo a sua
volta è solidamente ancorato ad un supporto fisso. Con il disco in posizione di equilibrio
tracciamo un segmento radiale che unisce il centro O con un punto P come in figura.
Se si ruota il disco sul piano orizzontale fino a portarlo alla posizione Q, il filo si torce
ed esercita pertanto un momento che tende a riportarlo alla posizione di equilibrio.
38
Il momento in questione quindi è un momento di richiamo che per la Legge di Hooke
è proporzionale alla entità della torsione. Cioè:
τ = −ϰ θ
Il simbolo ϰ è una costante che dipende dalle proprietà del filo e viene detta costate
di torsione. Il segno negativo indica il fatto che si tratta di un momento di richiamo.
In perfetta analogia col caso lineare dell’oscillatore armonico, scriveremo:
𝑑2𝜃
τ= Iα = I 2
𝑑𝑡
Che, utilizzando la
τ = −ϰ θ
diventa una equazione analoga
al caso lineare dell’oscillatore armonico:
𝑑2𝜃
−ϰ θ = I 2
𝑑𝑡
𝑑2𝜃
ϰ
θ
2 = −
𝑑𝑡
𝐼
39
Infatti, l’equazione differenziale in θ
𝑑2𝜃
ϰ
θ
2 = −
𝑑𝑡
𝐼
è identica alla equazione differenziale in x che abbiamo già visto per l’oscillatore
armonico lineare:
𝑑2𝑥
𝑘
=−
x
2
𝑑𝑡
𝑚
dove
I e ϰ hanno sostituito k e m, e la soluzione pertanto è
θ = θm cos (ωt + δ)
In analogia col caso lineare il periodo di oscillazione T è dato dalla:
T = 2π
𝐼
𝜘
40
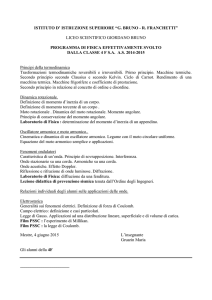
Il pendolo fisico
Ogni corpo che possa oscillare in un piano verticale intorno ad un determinato asse si
chiama pendolo fisico. Il pendolo fisico quindi è una generalizzazione del pendolo semplice.
41
Indichiamo con m la massa del corpo, con P il punto dove passa l’asse di rotazione, con C
il suo centro di massa e con I il suo momento di inerzia rispetto a P. Sia r il raggio vettore
P-C.
Supponiamo di spostare il corpo di un angolo
θ dalla sua
posizione di equilibrio
(che è quella in cui il centro di massa C giace sulla verticale passante per P).
P
θ
r
C
−m g
Il momento della forza di gravità
mg
sarà
τ = −mg r sin θ
42
Da questa formula
τ = −mg r sin θ
risulta che τ è proporzionale a sin
θ
e non a θ quindi la condizione per il moto armonico non sarebbe soddisfatta.
Tuttavia per piccoli angoli risulta sin
θ ≈θ
per cui potremo scrivere:
τ = −ϰ θ
dove:
ϰ = mg r
D’altra parte sappiamo che:
per cui potremo scrivere:
𝑑2𝜃
τ =I
𝑑𝑡2
𝑑2𝜃
𝑑𝑡2
= − −ϰ θ / I
Questa equazione l’abbiamo già vista e porta alla:
T = 2π
𝐼
𝜘
= 2π
𝐼
𝑚g𝑟
43
II Parte
44
Relazione fra il moto armonico e il moto circolare uniforme
Vedremo adesso che c’è una interessante relazione fra il moto armonico rettilineo e
il moto circolare uniforme. Inoltre, il moto circolare uniforme è anche l’esempio di una
composizione di moti armonici semplici, un fenomeno che incontreremo spesso nello
studio delle onde.
45
Si consideri un punto Q che si muove su di un cerchio di raggio A con velocità angolare
costante ω rad /sec. Il punto
e cioè sull’asse delle x.
P è la proiezione di Q sul diametro orizzontale,
y
Q
Chiameremo Q punto di riferimento e
il cerchio su cui Q si muove cerchio di
riferimento. Mentre
avanti e indietro sul diametro orizzontale.
La coordinata x di
quella di
δ
Q gira, P si muove
O
P
x
P è sempre la stessa di
Q. Analogamente per le componenti
orizzontali della velocità e dell’accelerazione.
= 0, sia δ l’angolo formato dal raggio
OQ con l’asse x (angolo iniziale).
Al tempo t
t=0
46
Poiché la velocità angolare
ω è costante,
ad ogni istante di tempo successivo, l’angolo
ωt + δ
fra il raggio OQ e l’asse delle x sarà dato da
y
Pertanto, ad ogni istante la coordinata x di Q (e
x = A cos (ωt + δ)
P) sarà:
Q
ωt + δ
Quindi il punto P si muove di moto armonico
P
x
O
Cioè: il moto armonico può essere considerato
come la proiezione di un moto circolare uniforme
su di un diametro.
t > 0
47
A seguito di questa definizione del moto armonico riferito al moto circolare uniforme si ha:
• La
ω di un
moto armonico è la velocità angolare del punto di riferimento
• La frequenza del moto armonico equivale al numero di rivoluzioni nell’unità di tempo del
punto di riferimento
• Quindi
f = ω / 2π, e di conseguenza ω = 2π f
• Il tempo impiegato dal punto di riferimento a compiere una rivoluzione completa
equivale al periodo T del moto armonico.
• Quindi T
= 2π / ω
ossia
ω = 2π / T
• L’ampiezza del moto armonico equivale al raggio del cerchio di riferimento
• La fase ωt
+ δ del moto armonico corrisponde all’angolo formato dal
raggio rotante nel cerchio di riferimento
48
Se avessimo considerato la proiezione y invece che la proiezione x avremmo
ottenuto il seguente risultato:
y = A sin (ωt + δ)
Si tratta nuovamente di moto armonico, che differisce dal precedente soltanto
per la fase iniziale
δ − π/2
E infatti il moto armonico può essere ottenuto come proiezione su un qualunque
diametro del moto sul cerchio del punto di riferimento Q.
Inversamente, il moto circolare uniforme può essere ottenuto come combinazione
di due moti armonici
49
Composizione di moti armonici
Vediamo allora il caso più generale di moti risultanti dalla combinazione di
moti armonici ortogonali.
In fisica occorre di frequente il caso in cui un moto sia la combinazione di due moti
armonici rettilinei fra loro ortogonali, cioè la somma di due oscillazioni indipendenti
Ci soffermeremo adesso sul caso in cui le frequenze delle due vibrazioni sono le stesse:
x = Ax cos (ωt + δx)
y = Ay cos (ωt + δy)
Le due relazioni indicano due moti armonici ortogonali (uno lungo x e uno lungo y)
aventi la stessa frequenza angolare ω ma diversa ampiezza e fase
50
Nel caso in cui anche le fasi iniziali δx e
moto nel piano
x-y è rettilineo.
δy siano equali, è facile rendersi conto
che il
Infatti considerando le due equazioni:
x = Ax cos (ωt + δ)
y = Ay cos (ωt + δ)
e dividendole membro a membro, si ha:
𝑥
𝑦
=
Ax
Ay
e cioè
Ay
y= x
Ax
Questa è l’equazione di una retta nel piano x-y con pendenza
Ay / Ax
51
Quindi per δx
= δy si hanno per esempio i seguenti moti:
y
y
Ay
Ay
45°
O
Ay
=1
Ax
60°
Ax
O
x
Ax
x
Ay
=2
Ax
52
Se invece
δx ≠ δy si avranno in generale dei moti ellittici.
Ay
dell’ellisse è data sempre dal rapporto
Ax
In questo caso l’orientazione
mentre la differenza di fase determina il rapporto
fra i due semiassi dell’ellisse (infatti anche un segmento è un caso particolare di ellisse «chiusa»
53
Moto armonico smorzato
Un esempio di particolare interesse è il caso di un moto armonico in cui sia presente
una forza di attrito proporzionale alla velocità del corpo e diretta in verso opposto.
Un esempio di questo fenomeno è illustrato in figura.
Alla massa m, appesa ad una molla di costante
−k x
elastica k, è attaccato un disco immerso in un fluido.
La forza d’attrito esercitata dal fluido è proporzionale alla
m
velocità della massa e diretta in verso opposto
𝑑𝑥
−b
𝑑𝑡
54
Per ricavare l’equazione del moto, utilizzeremo la II Legge di Newton
F = ma.
In questo
𝑑𝑥
caso F è la risultante della forza di richiamo della molla −k x e della forza d’attrito −b
.
𝑑𝑡
Quindi scriveremo:
F = ma
E cioè:
𝑑𝑥
−k x −b
= ma
𝑑𝑡
𝑑2𝑥
Ricordando che a =
2 l’equazione diventa:
𝑑𝑡
𝑑2𝑥
𝑑𝑥
m 2 +b
+kx=0
𝑑𝑡
𝑑𝑡
55
Si dimostra che se
b è sufficientemente piccolo, l’equazione differenziale:
𝑑2𝑥
𝑑𝑥
m 2 +b
+kx=0
𝑑𝑡
𝑑𝑡
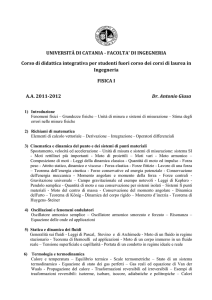
ha per soluzione la seguente funzione:
x (t) = A 𝑒 −𝑖𝜔𝑡 cos (ω’ t + δ)
dove: ω’ =
𝑘
𝑚
−
𝑏 2
2𝑚
Possiamo notare quanto segue:
a) La frequenza di oscillazione è leggermente più piccola
b) Il fluido rallenta il moto in modo esponenziale
56
L’andamento della funzione x(t) è quindi di questo tipo:
57
Oscillazioni forzate e risonanza
Sino adesso abbiamo trattato solo le oscillazioni che un corpo compie naturalmente
Quando viene allontanato dalla sua posizione di equilibrio. Per esempio per una massa
attaccata ad una molla, la frequenza naturale di oscillazione è
ω=
𝑘
𝑚
che nel caso in cui è presente una forza di attrito
ω’ =
𝑘
𝑚
−
−bv diviene
𝑏 2
2𝑚
In sostanza, ogni sistema elastico ha una sua frequenza naturale
58
Non c’è però alcun dubbio che noi possiamo forzare un sistema elastico a oscillare
applicandogli una forza esterna periodica.
In questo caso il corpo oscilla alla frequenza della forza e non alla sua frequenza naturale.
In questo caso si parla di oscillazioni forzate.
Tuttavia, la «risposta» del sistema a queste sollecitazioni dipende dalla relazione fra
la frequenza della forza esterna e la frequenza naturale del sistema.
In particolare vedremo che tanto più la frequenza della forza esterna è vicina alla
frequenza naturale, tanto più ampie saranno le oscillazioni.
59
L’equazione del moto di un oscillatore forzato si ottiene dalla relazione
F=ma
considerando come risultante
F delle forze la somma della forza di richiamo -kx,
della forza d’attrito -bv e della forza periodica esterna.
Scriveremo pertanto:
Ossia:
𝑑𝑥
−k x −b
+ Fm cos ω’’ t= ma
𝑑𝑡
𝑑2𝑥
𝑑𝑥
m 2 +b
+ k x = Fm cos ω’’ t
𝑑𝑡
𝑑𝑡
60
La soluzione di questa equazione differenziale è la seguente funzione x(t):
x(t) = ( Fm / G ) sin (ω’’ t − α)
dove:
G=
𝑚2 (ω’’2 − ω2 )2 + b2 ω’’2
e:
α = cos-1 ( b ω’’/G )
61
62
Esercizi ed esempi
63
Esempio 1
Una molla disposta in orizzontale è allungata di 3 cm quando su di essa agisce una forza
di 9 nt. A questa molla viene attaccata una massa m=1 kg. La massa, allontanata
di 4 cm dalla posizione di equilibrio lungo un tavolo privo di attrito viene quindi lasciata libera
di compiere oscillazioni armoniche.
Quesito-1: Quanto vale la costante elastica della molla ?
Quesito-2: Quanto vale la forze esercitata sulla massa da 1kg appena prima che questa
venga abbandonata ?
Quesito-3: Quale è il periodo dell’oscillazione ?
Quesito-4: Quale è l’ampiezza A del moto ?
Quesito-5: Quale è l’a velocità massima della massa oscillante ?
Quesito-6: Quale è l’accelerazione massima?
64
Una molla disposta in orizzontale è allungata di 3 cm quando su di essa agisce una forza
di 9 nt. A questa molla viene attaccata una massa m=1 kg. La massa, allontanata
di 4 cm dalla posizione di equilibrio lungo un tavolo privo di attrito viene quindi lasciata libera
di compiere oscillazioni armoniche.
Quesito-1: Quanto vale la costante elastica della molla ?
Dalla relazione:
F = −k x, risulta:
k = F/x
Quindi:
k = 9 nt / 0.03 = 300 nt/m
65
Una molla disposta in orizzontale è allungata di 3 cm quando su di essa agisce una forza
di 9 nt. A questa molla viene attaccata una massa m=1 kg. La massa, allontanata
di 4 cm dalla posizione di equilibrio lungo un tavolo privo di attrito viene quindi lasciata libera
di compiere oscillazioni armoniche.
Quesito 2: Quanto vale la forza esercitata sulla massa da 1kg appena prima che questa
venga abbandonata ?
La massa era stata allontanata di 4 cm dalla posizione di riposo, quindi:
F = −k x = -300 nt/m x 0.04 m = −12 nt
66
Una molla disposta in orizzontale è allungata di 3 cm quando su di essa agisce una forza
di 9 nt. A questa molla viene attaccata una massa m=1 kg. La massa, allontanata
di 4 cm dalla posizione di equilibrio lungo un tavolo privo di attrito viene quindi lasciata libera
di compiere oscillazioni armoniche.
Quesito 3: Quale è il periodo dell’oscillazione ?
Abbiamo visto che T
= 2π/ω
dove ω =
𝑘/𝑚
𝑛𝑡
ω
=
300 𝑚
1 𝑘𝑔
= 17,32 rad/sec
T = 2π / 17,32 = 0,36 sec
67
Una molla disposta in orizzontale è allungata di 3 cm quando su di essa agisce una forza
di 9 nt. A questa molla viene attaccata una massa m=1 kg. La massa, allontanata
di 4 cm dalla posizione di equilibrio lungo un tavolo privo di attrito viene quindi lasciata libera
di compiere oscillazioni armoniche.
Quesito 4: Quale è l’ampiezza A del moto ?
Abbiamo visto che l’ampiezza A è semplicemente l’elongazione iniziale: 4cm !!
68
Una molla disposta in orizzontale è allungata di 3 cm quando su di essa agisce una forza
di 9 nt. A questa molla viene attaccata una massa m=1 kg. La massa, allontanata
di 4 cm dalla posizione di equilibrio lungo un tavolo privo di attrito viene quindi lasciata libera
di compiere oscillazioni armoniche.
Quesito 5: Quale è la velocità massima della massa oscillante ?
Abbiamo visto che:
x (t) = A cos (ωt + δ)
𝑑𝑥
v (t) =
= −ωA sin (ωt + δ)
𝑑𝑡
𝑑2𝑥
2
a (t) =
2 = −ω A cos (ωt + δ)
𝑑𝑡
Quindi:
vmax = ωA = A 2π / T = 0,04 m 2 π / 0,36 s = 0,69 m/s
69
Quesito 6: Quale è l’accelerazione massima?
Dalle formule della slide precedente ricordiamo che:
𝑑2𝑥
2
a (t) =
2 = −ω A cos (ωt + δ)
𝑑𝑡
Quindi:
amax = ω2A = A k/m = (0,04 x 300)/ 1 = 12 m/s2
70
Esempio 2
Una sbarra sottile di massa m
= 0,1 kg
e lunga 0,1 m è sospesa ad un filo per il
suo centro. La barra viene fatta oscillare per torsione. Il periodo T risulta 2 sec.
La sbarra viene sostituita da un una lastra a forma di triangolo equilatero appesa anche
essa al centro di massa. In questo caso il periodo risulta in 6 sec. Quesito: Trovare il momento
di inerzia del triangolo rispetto all’asse di rotazione.
Abbiamo visto che nel pendolo di torsione il periodo T è dato dalla relazione:
T = 2π
Dove:
𝐼
𝜘
I è il momento di inerzia rispetto all’asse di rotazione della massa
e 𝜘 è la costante di torsione del filo.
Il momento di inerzia di una barra sottile di lunghezza l rispetto ad un asse di rotazione
ortogonale alla barra e passante per il centro è dato da
I = m l2 /12
Si ah quindi:
Isbarra = m l2 /12 = (0,1 x 0,12 ) /12
=
0,001/12 = 8,33 x 10−5 kg-m2
72
Dalla relazione:
T = 2π
𝐼
𝜘
si ricava la relazione fra il rapporto fra i periodi di oscillazione e il rapporto dei
relativi momenti di inerzia dei due corpi:
Tsbarra / Ttriang = (Isbarra / Itriang )1/2
da cui si ricava:
Itriang = Isbarra (Ttriang / Tsbarra )2
Ossia:
Itriang = 8,33 x 10−5 x (6/2)2 = 0,00075 kg-m2
73
Esempio 3
Trovare la lunghezza del pendolo semplice il cui periodo T è uguale a quella del pendolo fisico
Abbiamo visto che le espressioni per il periodo T dei due pendoli è:
Ts = = 2π
Tf = = 2π
𝑙
g
𝐼
𝑚g𝑟
Eguagliano i due periodi si ha:
2π
𝑙
= 2π
g
Da cui:
𝐼
𝑚g𝑟
𝐼
l=
𝑚𝑟
74