Lezione IX – quarta parte
Avviare la presentazione col tasto “Invio”
1
Riepilogo IV
2
Cinematica e dinamica
3
Avevamo iniziato il corso definendo le grandezze fisiche
fondamentali per trattare il moto
Posizione
Spostamento: cambiamento di posizione
Velocità: rapidità con cui cambia la posizione
Accelerazione: rapidità con cui cambia la velocità
4
Abbiamo visto che si tratta di grandezze vettoriali, anche se nel caso di moto in
una dimensione possiamo trattare il problema adottando il formalismo scalare.
Abbiamo preso dimestichezza con il problema della risoluzione temporale di un
dato fenomeno fisico:
Per esempio: poiché lo spostamento è definito some la variazione di posizione
in un dato intervallo di tempo, la variazione di posizione durante l’intervallo Δt
di un punto materiale che si muove di un moto «bizzarro» può non essere esaustiva.
O
Δr
Δt
x
Tempo t
5
Ci siamo resi conto che «campionando» il nostro fenomeno fisico (in questo
caso il moto rettilineo di un punto materiale) con un intervallo di tempo relativamente
lungo, perdiamo dettagli che potrebbero essere importanti.
E infatti, applicando a questo caso la definizione di velocità, abbiamo stabilito che
la formula:
v = Δr / Δt
deve essere intesa come velocità media, grandezza fisica a volte utile, ma a volte
meno utile. Per esempio nel caso seguente:
O
Δr = 0
x
Risulterebbe:
v = Δr / Δt = 0
Δt
Tempo t
6
Ci siamo quindi resi conto della opportunità di campionare il fenomeno con una maggiore
risoluzione temporale, cioè con intervallo di tempo Δt sempre più piccoli, fino a pervenire a
una rappresentazione grafica «continua» della posizione x(t) in funzione del tempo:
x
x
Δt→0
Tempo t
Tempo t
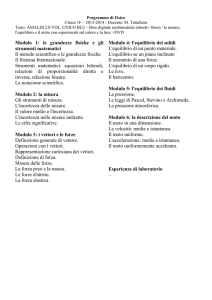
7
Per ogni istante t abbiamo definito la velocità istantanea v(t) come il valor limite a cui
tende il rapporto Δr / Δt quando Δt tende a zero:
v = lim ( Δr/Δt ) m / s
Δt→0
x=vt
x
x
Δt→0
Tempo t
In ogni punto, la velocità
istantanea v(t) è il
coefficiente angolare della
retta tangente la curva x(t)
Tempo t
8
Essendo in grado di ricavare una serie «fitta» di punti per la velocità istantanea
v(t),
siamo stati in grado di farne una interpolazione grafica, e ci siamo resi conto che a questo
punto eravamo in grado di applicare le stesso processo a limite (Δt 0) per ricavare
l’accelerazione istantanea, che in ogni punto è il coefficiente angolare della retta tangente
alla funzione velocità v(t) così come la velocità istantanea era il coefficiente angolare
della retta tangente alla funzione spostamento x(t).
A questo proposito abbiamo visto un esempio abbastanza semplice: una particella che
parte da un punto P localizzato a 1m dall’origine e si sposta verso il punto Q localizzato a 5
m dall’origine e quindi torna indietro al punto R a 2 m dall’origine.
0
P
R
1
2
Q
3
4
5
6
7
8
9
x
9
6 m
Abbiamo definito un sistema di assi cartesiani per x e t.
Lo spostamento in questo sistema di assi sarà descritto da una curva così.
x
3
4
5
Q
1
2
R
P
t
1
2
3
4
sec
10
Abbiamo calcolato la velocità istantanea
elevato di punti
vi (ti) in numero di
punti sufficientemente
x
Q
R
P
t
1
2
3
4
sec
11
4 m/s
A questo punto abbiamo definito un sistema di assi cartesiani per vx e t, e abbiamo
Riportato i valori delle velocità istantanee calcolate nei vari punti e abbiamo operato
una interpolazione grafica
vx
P
S
Q
-4
0
W
R
-8
t
1
2
3
4
sec
12
vx
-4
0
4 m/s
La linea curva che abbiamo individuato nel piano (vx , t) altro non è che la rappresentazione
grafica della velocita del punto materiale in funzione del tempo vx (t).
-8
t
1
2
3
4
sec
13
Di questa funzione vx(t) potremo calcolare l’accelerazione istantanea punto per punto
= dv /dt
è la pendenza della retta tangente in ogni punto
vx
-4
0
4 m/s
ricordando che a
-8
t
1
2
3
4
sec
14
Abbiamo anche visto che nel caso unidimensionale, l’equazione del moto di un punto
materiale che si muove a partire da un punto inziale x0, con una velocità iniziale pari
a v0 e con una accelerazione a costante è la seguente:
x(t) = x0 + v0 t + ½ at2
E abbiamo visto alcuni esempi in cui a = g = −9,8 m/s2
15
Poi siamo passati dal caso unidimensionale al caso bidimensionale (moto in un piano)
e ci siamo resi conto che in questo caso l’uso del formalismo vettoriale non è opzionale
ma risulta obbligatorio. Questo in quanto non esiste una direzione unica, e la direzione
del moto va quindi definita dalle stesse grandezze in gioco. Infatti, in un piano
x-y ,
un punto materiale può manifestare il suo moto in una qualunque direzione.
In particolare, un punto che si muova lungo una linea curva, cambia continuamente direzione.
Tuttavia, ci siamo resi conto che il moto delle proiezioni del punto lungo le componenti
x-y è ovviamente
sempre un moto unidimensionale.
16
Mentre il punto materiale si muove lungo la traiettoria curva, le sue proiezioni sugli assi x e y
si muovono di moto rettilineo (ma non necessariamente uniforme).
y
Quindi: tutto ciò che abbiamo imparato sulle
yQ
Q
yP
equazioni del moto in una dimensione può essere
tranquillamente applicato alle componenti lungo
P
gli assi x e y delle varie grandezze fisiche:
xP
xQ
x
y
vx
vy
ax
ay
x
17
Dinamica:
Abbiamo introdotto la dinamica dicendo che in sostanza, il problema della dinamica
di un corpo (per semplicità un punto materiale) è determinare come si muove
la particella, note le cause che agiscono su di essa. Quindi per esempio nel caso di
un moto unidimensionale lungo l’asse x, determinare la funzione x(t) in funzione delle
cause che agiscono sulla particella. Adesso abbiamo definito queste cause: le forze
che agiscono sulla particella, o più in generale la risultante F delle forze Fi che agiscono
sulla particella. E abbiamo definito tre importanti Leggi: le Leggi di Newton
18
La I Legge di Newton:
Ogni corpo persiste nel suo stato di quiete o di moto rettilineo uniforme finché forze
esterne ad esso non lo costringano a mutare questo stato.
La II Legge di Newton:
L'accelerazione di un corpo è direttamente proporzionale e nella stessa direzione
della forza agente su di esso, ed è inversamente proporzionale alla sua massa:
F=ma
La III Legge di Newton:
Se un corpo A esercita una forza su un corpo B, il corpo B esercita su A una forza
uguale e contraria.
19
Abbiamo visto che una interessante formulazione della II Legge è la seguente:
a = F/m
E’ interessante in questa forma in quanto ci permette di ricavare informazioni sul moto
di un corpo una volta note le forze che agiscono su di esso.
Rivediamo quali sono le implicazioni pratiche di questa Legge, nella risoluzione del
problema della determinazione di x(t) in funzione di F
20
Le implicazioni sono molto interessanti: e si perché già in cinematica abbiamo imparato
a determinare x(t) in funzione dell’accelerazione a e quindi se possiamo scrivere
a = F/m
siamo immediatamente in grado di determinare x(t) in funzione di F
Quindi per esempio nel caso di un moto unidimensionale, dalle equazioni della cinematica
che già conosciamo:
x(t) = v0t + ½ at2
v(t) = v0 + at
Ponendo:
a = F/m
Scriveremo:
x(t) = v0t + ½ (F/m)t2
v(t) = v0 + (F/m)t
21
Ovviamente, non dimentichiamo che le equazioni che abbiamo appena scritto erano state
derivate per il caso a = costante, e quindi valgono solo nel caso F = costante.
22
Quindi per esempio, nel caso di a = costante, si osserva in funzione del tempo
una cosa del genere:
a(t)
t
v(t)
t
23
Quindi: la formula che abbiamo scritto in per il caso semplice a
= costante,
è soltanto il caso particolare di una relazione più generale in cui la velocità è (istante per
Istante) l’area (l’integrale) definita dalla curva nel piano a(t)-t.
Nel caso particolare di un moto uniformemente accelerato, cioè a = costante,
la velocità cresce linearmente, ma è sempre data (istante per istante) dall’area
in questione che nel caso specifico è l’area del seguente rettangolo:
a
Area = a x
t
v = a t (+ ovviamente un termine iniziale v0)
t
24
Quindi velocità istantanea e accelerazione istantanea, cioè le funzioni
v(t) e a(t)
sono connesse dalle relazioni inverse:
a(t) = dv(t) / dt
v(t) =
∫
a(t) dt
Questo ci dice che quando avremo a che fare con forze variabili (e di conseguenza
accelerazioni variabili) dovremo inevitabilmente ricorrere a derivate e integrali,
anche se in molti casi vedremo che le soluzioni sono semplici e spesso posso essere
ricavate in base a dei grafici.
25
La «ricetta» per risolvere un problema generico (l’esito di un esperimento):
Ci sono corpi in moto ? In caso affermativo, i dati del problema sono sufficienti
a calcolarne l’energia cinetica e la quantità di moto ? In caso affermativo, calcoliamo
queste grandezze! Poi vedremo bene cosa farne!
Ci sono urti ? In caso affermativo sono elastici ?anelastici? o completamente anelastici ?
Siamo quindi in condizione di prevedere l’esito di questi urti ? Se si, passiamo ai numeri!
Ci sono fasi dell’esperimento in cui un dato corpo perde la sua energia cinetica in modo
conservativo ? per esempio risalendo una rampa senza attrito o comprimendo una molla ?
In caso affermativo, passiamo ai numeri, ci sarà utile!
Ci sono invece fenomeni in cui l’energia cinetica viene persa attraverso l’intervento di
forze non conservative ? In questo caso, il problema ci fornisce sufficienti informazioni
per calcolarla ?
26