Quarto incontro LIMA 3D
Università degli Studi di
Milano
Dipartimento di Scienze
dell’Informazione
Laboratory of
Image Analysis
and Vision
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
1
Due Approcci per la ricostruzione
3D di volti
• Modello semantico del volto
• Mesh sparsa i cui vertici hanno una semantica nota
• Permette di calcolare misure biometriche significative
• maggiore semplicità
• Stereo matching denso
• Mesh densa del volto, ricostruito con maggiore
dettaglio e precisione
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
2
Modello semantico del volto
•Modello 3D di un volto generico
•Deformato per adattarlo al volto di uno specifico individuo
Modello di CANDIDE:
mesh avente
114 triangoli e 64 vertici
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
3
Modello semantico del volto
• Primo passo:
• ricostruzione 3D di 15 punti caratteristici del volto,
determinati su tre immagini stereo dello stesso
individuo
• i vertici del modello 3D corrispondenti ai punti
caratteristici sono i punti di controllo usati per
deformare la mesh
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
4
Modello semantico del volto
I due passi di deformazione del modello
• Allineamento globale:
• Trasformazione affine per ottenere un sistema di
riferimento unico
• Adattamento locale:
• Spostamento dei punti di controllo
• In modo che coincidano coi 15 punti caratteristici
ricostruiti
• Spostamento degli altri vertici del modello
• in funzione dello spostamento dei punti di controllo
• ogni punto di controllo ha una regione di influenza
sulla mesh di Candide
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
5
Modello semantico del volto
• Il modello di Candide è formato da un basso
numero di triangoli ed è quindi:
• Facilmente implementabile
• Velocemente deformabile
MA
• La semplicità del modello non permette di
ottenere significative deformazioni
• Le ricostruzioni di volti diversi appaiono simili
Necessità di un modello più preciso
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
6
Modello semantico del volto
Il nuovo modello
• Modello 3D creato per ogni individuo sulla
base di:
• 15 punti caratteristici localizzati nelle immagini stereo
del volto
• 72 vertici aggiuntivi:
• 22 vertici inferiti sulla immagine frontale
• 25 vertici inferiti per ognuna delle immagini laterali
• Per ciascuno di questi vertici si cerca la
corrispondenza
• Modello finale con 156 triangoli
• Problema: determinare corrispondenze precise dei
72 punti
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
7
Modello semantico del volto
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
8
Modello semantico del volto
Ricerca delle corrispondenze
• Si definiscono tre cammini che partono da un punto
caratteristico (.) e terminano nel punto (X) di cui si cerca il
corrispondente
• Per ogni cammino viene cercato il cammino
corrispondente nell’immagine di ricerca
• Il mediano tra i tre corrispondenti trovati per il punto
il corrispondente del punto
7 Luglio, 2005
X stesso.
Verona, 4° incontro LIMA 3D
Xè
9
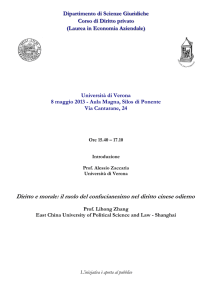
Risultati
Modello semantico del volto
Corrispondenze
trovate
Modello
ricostruito
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
10
Modello semantico del volto
Integrazione dei due modelli
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
11
Stereo Matching Denso
• Ricerca di corrispondenze dense su immagini
stereo, mediante l’utilizzo di misure di similarità, al
fine di definire una mesh densa
• Vincoli
• Esistenza ed Unicità delle corrispondenze
• Continuità e “Smoothness” della superficie 3D
• Vincolo di Ordinamento
• Vincolo Epipolare
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
12
• Metodi Locali vs. Globali
• Metodi locali: corrispondenze non accurate in regioni
a basso gradiente
• Metodi globali: spesso con programmazione
dinamica che non permette controllo dell’algoritmo
• Risoluzione delle immagini
• Bassa risoluzione: consente solo una ricostruzione
grossolana
• Alta risoluzione: caratterizzata da un basso rapporto
segnale-rumore
• Disparità delle immagini
• Bassa disparità: il problema di ricostruzione è più
sensibile agli errori
• Alta disparità: distorsione prospettica maggiore
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
13
Stereo matching denso
Algoritmi sperimentati
1. A.Fusiello, V.Roberto, E.Trucco “Efficient Stereo with Multiple
Windowing” CVPR 97
2. C.L. Zitnick, T. Kanade “A Cooperative Algorithm for Stereo
Matching and Occlusion Detection” PAMI 2000
3. K. Jonsson “Shader-based stereo matching with local
algorithms”Master thesis in Lund University 2003
4. C. Sun “Fast Stereo Matching using Rectangular Subregioning
and 3D Maximum-Surface Techniques” Int. Journal of Comp.
Vision 2002
5. S. Huq, B. Abidi, A. Goshtasby, M. Abidi “Stereo Matching with
Energy Minimizing Snake Grid for 3D face modeling” SPIE
2004
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
14
Stereo matching denso
“Stereo Matching with Energy Minimizing
Snake Grid for 3D face modeling”
Huq, Abidi, Goshtasby, Abidi
• “Snake grid”
• Ricerca della corrispondenza dei vertici di una coppia di
griglie
• Deformazione locale e iterativa di una griglia in modo da
minimizzare globalmente:
E i, j E i, j int E i, j ext
• Eint tende a mantenere la forma regolare
• Eext corrisponde alla funzione di correlazione
• Inizializzazione della griglia con scanner laser
• Raffinamento “coarse to fine”
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
15
Stereo matching denso
Metodo da noi proposto
• Tecnica basata sugli “snake grid”: •Multi-risoluzione
•Coarse-to-fine
•Multi-window
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
16
Stereo matching denso
L’algoritmo di stereo matching denso
• Spostamento dei vertici di una griglia per minimizzare la
funzione energia:
E i, j E i, j int E i, j ext
• Eint non tiene conto solo dello spostamento laterale ma
anche di quello verticale
• Eext viene calcolato con un metodo multi-window
Eint
-1
0
7 Luglio, 2005
1
Eext
-1
Verona, 4° incontro LIMA 3D
0
1
17
Spostamento di un nodo della griglia
• Spostamento “simultaneo” dei nodi della griglia
• Simulazione di tale spostamento simultaneo tramite
un’evoluzione iterativa
• Minimizzazione dell’energia totale Etot della griglia
E
-1
0
dEtot
dt
1
10%
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
18
L’evoluzione degli snake grids
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
19
L’evoluzione degli snake grids
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
20
Sviluppi futuri
• Miglioramenti di entrambi gli approcci
• Definizione di una mesh sparsa più dettagliata
• Ottimizzazione del metodo di stereo matching
denso
• Integrazione dei modelli
• Unione dei due modelli al fine di avere un modello
ben dettagliato con semantica
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
21
Stereo matching denso
“Efficient Stereo with Multiple Windowing”
Fusiello, Roberto, Trucco
• “Area-based algorithm”:
• adotta la SSD come misura di similarità
• “Multiple Windows”:
• IDEA: mantenere quella a massima similarità
• Utilizza 9 diverse finestre
• “Left-Right Consistency constraint”:
• Riconosce e gestisce le occlusioni
• “Uncertainty Estimate”:
• Stima l’affidabilità delle disparità calcolate
• Problema: tecnica locale non ottimale per i volti
che presentano regioni con scarsa tessitura
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
22
Stereo matching denso
“A Cooperative Algorithm for Stereo Matching
and Occlusion Detection”
Zitnick, Kanade
• Vincoli di unicità e continuità
• Si basa su:
• Template adattativo
• Volume 3D di correlazione
• Aggiornamento iterativo delle corrispondenze
• Occlusioni:
• Rilevate tramite sogliatura dei valori di corrispondenza
• Problema: tecnica locale non ottimale per i volti
che presentano regioni con scarsa tessitura
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
23
Stereo matching denso
“Shader-based stereo matching with local
Jonsson
algorithms”
• Input: immagini rettificate
• Costruzione delle piramidi multi-risoluzione
• Ricerca delle corrispondenze al livello più alto
(Inizializzazione della disparity map)
• Per ogni livello
• Inizializza la disparity map interpolando quella del livello
superiore
• Raffinamento delle corrispondenze usando la SSD
• Problemi:
• È molto sensibile all’inizializzazione
• Non sfrutta i vincoli di ordinamento e di smoothness
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
24
Stereo matching denso
“Fast Stereo Matching using Rectangular Subregioning and 3D Maximum-Surface Techniques”
Sun
• Vincoli: di continuità ed epipolare
• Algoritmo:
• Suddivisione delle immagini in sotto regioni per il
calcolo veloce della similarità (RSR)
• Costruzione di un volume 3D di correlazione
• Utilizzo di una tecnica di programmazione dinamica
per la ricerca nel volume 3D della superficie di somma
massima (TSDP)
• Problemi:
• la convergenza non è uniforme
• Non c’è controllo sull’algoritmo
7 Luglio, 2005
Verona, 4° incontro LIMA 3D
25
Trovare le corrispondenze
Corrispondenze tra cammini
• La ricerca del cammino corrispondente parte
dal punto caratteristico
• Per ogni punto del cammino
• si estrae un template centrato nel punto stesso;
• si cerca il corrispondente nell’intorno rettangolare
centrato nel punto precedentemente trovato; la misura
di similarità usata è la Zero Normalized Cross Correlation
(ZNCC)
7 Luglio, 2005
Punti caratteristici corrispondenti
Torna
Verona, 4° incontro LIMA 3D
26