Moto Armonico
Un materiale elastico è un materiale che ha la capacità di riacquistare la
forma iniziale dopo essere stato compresso o deformato (p.es. la molla)
La forza necessaria per allungare o
accorciare una molla (caso 1D) è
linearmente proporzionale
all’allungamento stesso. La costante di
proporzionalità k è detta costante elastica
F k ( x x0 )
L’osservabile x0 rappresenta l’estensione della molla quando non è
soggetta a forze, l’osservabile x indica l’attuale estensione della
molla
• Se comprimo la molla la forza che esercito è negativa
x x0
F k ( x x0 ) 0
• Se estendo la molla la forza che esercito è positiva
x x0
F k ( x x0 ) 0
Per motivi di semplicità si considera sempre la molla di estensione
nulla, cioè x0 = 0. E’ facile rimpiazzare x con x-x0 quando è il caso.
Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW
1
Per il principio di azione e reazione la forza che esercita la molla è di
modulo e direzione uguale ma opposta in verso, ovvero è
F k ( x x0 )
che per semplicità viene scritta con x0 = 0
F kx
Il moto associato ad una forza del tipo F = -kx è detto moto armonico
semplice ed l’andamento della coordinata x in funzione del tempi è
rappresentato da una sinusoide
Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW
2
L’escursione massima dalla posizione di
equilibrio A è detta ampiezza del moto.
L’intervallo di tempo T impiegato per
compiere un ciclo è detto Periodo.
1
T
2
T
F kx
ma kx
Frequenza
Pulsazione o
Velocità angolare
d 2x
m 2 kx
dt
Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW
3
Equazione Oraria del moto armonico
x(t) = A cos(t +)
F kx
ma kx
d 2x
m 2 kx
dt
d 2x
2
x
2
dt
d 2x
k
x
2
dt
m
k
2
m
Equazione Armonica
L' equazione ha una soluzione del tipo
x xo sin t
v xo cost
x o e φ sono due costanti
x o e φ dipendono dalle condizioni iniziali
x(t 0) xo sin
v(t 0) xo cos
Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW
4
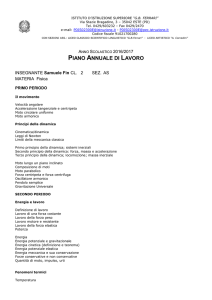
Esempio
Sia K 16 N / M
m 0.01 Kg
Condizioni iniziali per t 0 x 5 e v 0
F 16 x
d 2x
0.01 2 16 x
dt
0.01 a 16 x
x 5 sin 40t
d 2x
1600 x 0
dt 2
v 200 cos40t
a 8000 sin( 40t )
X (metri)
Diagramma Orario
10
0
-10
0
5
10
15
20
25
30
35
40
25
30
35
40
25
30
35
40
tempo (secondi)
velocita
(m/s)
Diagramma di Velocità
500
0
-500
0
5
10
15
20
tempo (secondi)
accelerazion
e (m2/s)
Diagramma di Accelerazione
500
0
-500
0
5
10
15
20
tempo (secondi)
Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW
5
La forza elastica, che induce una oscillazione armonica, è una forza
conservativa con potenziale
Rif. A
F
U ( A) LRif
A
ds
XA
Kxdx
X Rif
X
A
1
1
1 2
2
2
U ( A) Kx
KX A KX rif
2
2
2
X Rif
Se X rif 0
1
U ( A) KX A2
2
Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW
6
La forza elastica è lo stereotipo di un gran numero di sistemi fisici,
in pratica di tutti i fenomeni in cui è presente una oscillazione come
ad esempio il pendolo
Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW
7
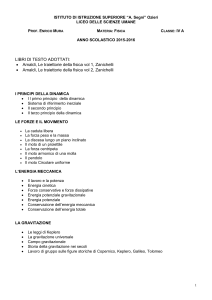
Pendolo
F ma mg j
Y
Fx mg sin
Fy mg cos 0
X
max mg sin
mg cos
-mg
Lo spostamento su una circonferenza può essere scritto come
x r
se l’angolo è sufficientemente piccolo allora
sin( )
l’equazione che descrive dal pendolo
d 2x
d 2 r
d 2
Fx max m 2 m
mr 2
dt
dt 2
dt
d 2
mr 2 mg
dt
Fx mg sin mg
g
0 sin t 0 sin t
r
Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW
8