Il prodotto vettoriale
• Dati i vettori a e b , si definisce prodotto vettoriale a b
il vettore c così individuato:
c absen f
– Il modulo del vettore c è dato da:
dove l’angolo f è l’angolo minore di 180° compreso tra
i due vettori
– La direzione è perpendicolare al piano individuato dai vettori a e b.
– Il verso è determinato con la regola della mano destra:
• I formulazione:
– Si dispone il pollice della mano destra lungo il primo vettore
– Si dispone l’indice della mano destra secondo il secondo vettore
– Il verso del medio individua il verso del prodotto vettoriale
• II formulazione
– Si chiude a pugno la mano destra mantenendo sollevato il pollice
– Si dispone la mano destra in maniera che le dita chiuse a pugno
indichino il verso in cui bisogna far ruotare il primo vettore per
sovrapporlo al secondo percorrendo l’angolo f minore di 180°
– Il verso del pollice individua il verso del prodotto vettoriale.
G.M. - Edile A 2002/03
Proprietà del prodotto vettoriale
• Il prodotto vettoriale non è commutativo: a b b a
a b b a
• Infatti:
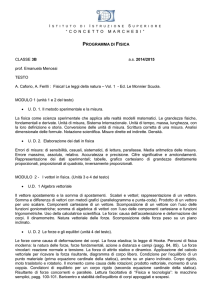
• Interpretazione geometrica del prodotto vettoriale
•
h = b sin
b
•
a
Area ah absin a b
Il modulo del prodotto
vettoriale è uguale all’area
del parallelogramma
formato con u due vettori.
Vettori paralleli o
antiparalleli hanno un
prodotto vettoriale
nullo
G.M. - Edile A 2002/03
Ulteriori proprietà del prodotto vettoriale
• Prodotto vettoriale
attraverso le componenti
cartesiane: i j k
a b ax
ay
az
bx
by
bz
i a y bz bya z ja xb z b xa z k a xb y bx a y
ii 0 i jk
i k j
j j 0 j k i
j i k
k k 0 k i j k j i
a b c a b a c
Proprietà distributiva
G.M. - Edile A 2002/03
Il momento di un vettore
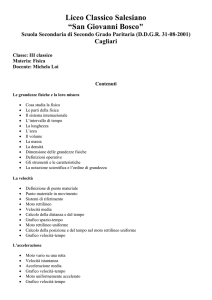
• Dato un vettore V qualsiasi ed il punto O, che in questa occasione si
chiama “polo”, si definisce momento del vettore V rispetto al polo O
la quantità:
MO r V
y
V
r posizione rispetto ad O del punto
di applicazione del vettore V.
MO=rVsen =V(rsen) =bV
Il modulo del momento, MO, è uguale al
r
O
b=r sen
x
È importante l’ordine!
Prima r poi V!
modulo del vettore V per il braccio del
vettore V rispetto al polo O
• Il braccio è la distanza della retta di
azione del vettore V dal polo O
• Spostando il vettore V sulla sua retta di
azione il momento resta invariato.
G.M. - Edile A 2002/03
Momento della quantità di moto
o momento angolare
• Data la particella di massa m,
y
– la cui posizione è individuata, al tempo t, dal
vettore posizione r,
– che al tempo t si muove con velocità v
– E quindi possiede una quantità di moto
p=mv
p
r
• Si definisce momento della quantità di moto
della particella rispetto al polo O, la
x
grandezza:
b r sen
O
O
Il modulo vale:
Le dimensioni:
O
rp
rmv sen bmv
O r mvsen LMLT 1 ML2 T1
Le unità di misura:
kgm2s-1
G.M. - Edile A 2002/03
Momento della forza
– Data la particella di massa m,
y
• la cui posizione è individuata, al tempo
t, dal vettore posizione r,
• che al tempo t subisce l’azione della
forza F
F
b
O
r
x
– Si definisce momento della forza F
rispetto al polo O, la grandezza:
MO r F
Il modulo vale:
MO rFsen bF
b r sen r sen180
Le dimensioni:
MO rF sen LMLT 2 ML2 T2
Le unità di misura:
kgm2s-2
Da non confondere con il lavoro che ha le stesse dimensioni
(il lavoro è uno scalare, il momento della forza un vettore: sono
due grandezze completamente diverse)
G.M. - Edile A 2002/03
Relazione tra il momento della quantità
di moto ed il momento della forza
• Durante il moto di una particella, sia la sua posizione r che la sua
velocità cambiano con il tempo,
– È lecito aspettarsi che anche il momento della quantità di moto della
particella rispetto al polo O vari con il tempo.
– Valutiamo a quanto è uguale la sua variazione (calcoliamo la derivata):
d O dr p dr
dp
pr
dt
dt
dt
dt
dr
p v p v mv
dt
• Attenzione a non cambiare il posto dei vettori, il prodotto vettoriale non
commuta.
• Il primo termine è nullo: i due vettori sono paralleli
d O
dp
r
r F MO
dt
dt
•
La variazione del momento della quantità di moto della particella rispetto al
polo O è uguale al momento della forza applicata valutato rispetto allo stesso
polo!
(è una diretta conseguenza della II legge di Newton)
G.M. - Edile A 2002/03
Forze centrali
• Si definisce forza centrale una forza agente in una certa regione dello
spazio con le seguenti proprietà:
– per qualunque posizione del punto materiale P che subisce la forza,
– la direzione della forza agente su P passa sempre per un punto fisso dello
spazio, detto centro della forza centrale,
– e il suo modulo è funzione soltanto della distanza del punto materiale P dal
centro stesso.
• Esempio di forza centrale: la forza di gravitazione universale.
mM
mM r
u
G
2
r
2
r
r r
1 q 1q 2
Anche la forza di Coulomb è F
2 ur
4o r
centrale
F G
•
• Così come la forza elastica
y
F
P
r
F kxi
O=S
• Le forze centrali sono conservative
x
G.M. - Edile A 2002/03
Moto di un punto materiale sotto
l’azione di una forza centrale
• Il momento di una forza centrale valutato rispetto al
centro della forza è nullo
y
– La forza ed il vettore posizione sono paralleli o anti
paralleli
d o
d o
0 o cos tan te
Mo
dt
dt
• Il momento della quantità di moto rispetto al centro
della forza deve rimanere costante
– in direzione
• Il moto è un moto piano
F
r
v
x
O
y
v t t
– Verso
• La traiettoria viene percorsa sempre nello stesso verso:
orario o antiorario
r(t t)
r (t)
– Modulo
• La velocità areale è costante: il segmento che connette il
centro della forza con il punto materiale spazza aree uguali
in tempi uguali.
v(t)
O
x
G.M. - Edile A 2002/03
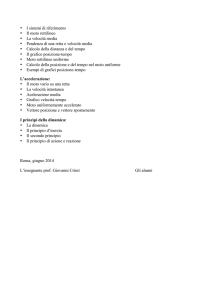
La velocità areale
• Consideriamo l’intervallo di tempo t
– L’area spazzata nell’intervallo t è quella evidenziata in
figura
– Approssimativamente uguale all’area del triangolo di lati
r(t), r(t+t), r.
– L’eguaglianza approssimata diventa precisa per t che
tende a zero.
1
– L’area del triangolo vale: A 2 r(t)h
y
v t t
r(t t)
h
v(t)
r
fv
r (t)
vr
x
O
1
dA
A
h
2 r(t)h
1
La velocità areale:
lim t 0
lim t0
2 r(t)lim t0
dt
t
t
t
Dalla definizione di velocità istantanea ricaviamo che:
dA 1
r
h
2 rv 12 rvsen f
e quindi
v lim t0
v lim t0
dt
t
t
Il modulo del momento della quantità di moto rispetto al centro della
forza vale:
e quindi: dA 1 O
O rmv senf
2
dt
m
Nel caso di forze centrali, poiché il modulo del momento della quantità di
moto è costante, allora la velocità areale è costante
G.M. - Edile A 2002/03
La velocità areale
•
Se indichiamo con l’angolo formato tra i vettori
y
posizione all’istante t e t+t
h
r(t t)sen
v lim t 0 lim t0
t
t
r(t)lim t0
r
t
Il momento angolare:
Perielio
Più veloce
v t t
r(t t)
O
h
r (t)
v(t)
r
fv
vr
x
rmv sen mrv mrr mr
2
O
Afelio
Più lento
b2
e 1 2
a
G.M. - Edile A 2002/03
Le leggi di Keplero
• Le orbite dei pianeti sono delle ellissi. Il sole occupa uno dei fuochi.
• Il segmento che congiunge il pianeta con il sole, spazza aree uguali in
tempi uguali: in altre parole la velocità areale (l'area spazzata nell'unità
di tempo), è costante.
• Il quadrato del tempo di rivoluzione (T2), è proporzionale al cubo del
semiasse maggiore dell'ellisse (a3). La costante di proporzionalità è la
stessa per tutti i pianeti del sistema solare.
• L’ipotesi che la forza di gravitazione universale sia una forza centrale
• insieme con quella che un sistema di riferimento legato al sole possa
essere considerato inerziale
• giustifica le prime due leggi di Keplero ( in realtà la prima solo
parzialmente)
G.M. - Edile A 2002/03
Verifica della III legge di Keplero
• Faremo la verifica supponendo che le orbite dei pianeti
siano circolari anziché ellittiche.
– L’eccentricità per la terra è 0.0167
– a è il semiasse maggiore
– b quello minore
b2
e 1 2
a
• Se la traiettoria è circolare il moto è uniforme (la velocità areale deve
essere costante)
• Il pianeta è soggetto ad un’accelerazione centripeta
• Quindi la forza di gravitazione universale si comporterà da forza
centripeta:
mM
mv 2
FG G 2 ma n
r
r
G.M. - Edile A 2002/03
Verifica della III legge di Keplero
2r
T
v
Ma la velocità è legata al periodo dalla relazione:
mM mv 2
G 2
r
r
2r
m
T
r
2
m4 2r 2 m4 2 r
2
2
rT
T
mM m4 2 r
G 2
2
r
T
42 3
T
r
GM
2
Che appunto verifica la III legge di Keplero
G.M. - Edile A 2002/03
L’energia potenziale della forza di
gravitazione universale - la velocità di fuga
• La forza di gravitazione
universale è conservativa
U
E>0
E=0
U(r) G
GmM T
RT
r
mM
r
• La velocità di fuga dalla terra:
U
ro
E
E<0
1
GmM T
2
mv
2
RT
• Per la fuga dalla terra, E>=0:
1
GmM T
2
mv f
0 vf
2
RT
mg
GmM T
R2T
2GM T
RT
v f 2gR T
6
6
3
2 9.81* 6.37 *10 125.0 *10 11.2 *10 m s
G.M. - Edile A 2002/03
Sistemi di particelle
z
•
– Si determinano le forze che agiscono sul
punto materiale
– Si applica la seconda legge di Newton
– Si risolvono le tre equazioni differenziali
per trovare il moto dei punti proiezione
sugli assi (se le equazioni sono
indipendenti)
– Altrimenti si risolve il sistema di tre
equazioni derivanti alla seconda legge di
Newton.
– Si determina così la legge oraria.
•
•
( est )
Abbiamo mostrato come è possibile
determinare il moto di un punto materiale
Vediamo ora come si può descrivere il
moto di sistemi più complessi che non
possono essere rappresentati con un punto
materiale.
R1
F12
P1
F21
r1
F23
F13
r2
P2
F31
R (2est )
y
r3
( est )
R3
P3
x
F32
Proviamo ad operare come
abbiamo imparato a fare.
Studiamo cioè i Sistemi di punti materiali!
G.M. - Edile A 2002/03
Sistemi di particelle
z
2
d r
m1 21 R1
dt
( est )
R1
F12
P1
d 2r2
m2 2 R 2
dt
................
d 2ri
m i 2 Ri
dt
.................
2
d rn
m n 2 Rn
dt
F21
r1
agenti sulla particella i
• una volta per ciascun punto facente parte
del sistema
• poi si può risolvere il sistema di 3n
equazioni differenziali che viene fuori.
Molto difficile!!
F13
R i risultante delle forze
Si può scrivere n volte la seconda legge
della dinamica,
F23
r2
P2
F31
R (2est )
y
r3
( est )
R3
P3
x
F32
È possibile, rinunciando ad una descrizione
dettagliata del moto delle singole particelle,
ottenere almeno una descrizione del moto
dell’insieme delle particelle?
G.M. - Edile A 2002/03
Il centro di massa di un sistema di punti
materiali
m r
m m m .... m .... m M
n
n
i i
rCM
i
i1
n
m
1
2
i
n
i1
i
n
m r
i1
i i
z
m1r1 m2 r2 .... mi ri .... mn rn
i1
n
m x
P1
i i
n
ponendo M
r1
rCM
r2
P2
i1
M
n
m y
r2
i i
yCM =
n
i1
M
M
m z
i i
rCM =
i1
n
m r
P3
x
xCM =
i1
y
r3
mi
i i
z CM =
i1
G.M. - Edile A 2002/03
M
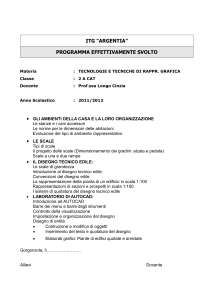
Il centro di massa del sistema terra-sole
mt
ms
xs
O
x
xt
n
m x
i i
i1
xCM =
n
x CM
M
m y
i i
y CM =
i1
n
M
m z
0
i i
z CM =
i1
M
0
= m sxs + m tx t
ms + mt
dove
m s = 2 1030 Kg;
d ts = 1.5 1011 m
m t = 6 1024 Kg
x CM
m S xS m T x T m TxS m Tx S
mS mT
d CM S
mT
dT S
mS mT
xS
m T x T xS
mT
xS
d TS
mS mT
mS mT
d CM T
mS
dT S
mS mT
dCM S m T
d CM T
mS
• Il centro di massa si trova sul
segmento che congiunge i due punti
materiali
6x102 4
11
5
d CM S
1.5x10
4.5x10
m
• È più vicino al punto materiale di
2x103 0 6x10 2 4
massa maggiore
G.M. - Edile A 2002/03
• Tre masse uguali sono ai vertici di un triangolo equilatero di lato L.
Determinare la posizione del centro di massa
y
3
x CM
L
1
1 (0,0)
2
y CM
3 (L cos 60, Lsen 60)
1
2
x
3
1
CM12
m1x1 m2x 2 m3 x3 m0 L L cos60 1.5 L L
m1 m2 m3
3m
3
2
x
2 (L,0)
y
Applic
azione
x
m y m 2y 2 m3 y3 m0 0 L sen60
1 1
m1 m 2 m3
3m
3 L
3L
2
3
6
Posso determinare prima il centro di massa delle particelle
m1x1 m2 x 2
x1 x2 L
1 e 2.
x CM1 2
m1 m 2
se m1 m 2
xCM 1 2
2
2
Calcoliamo ora la posizione del CM della particella 3 e di
una particella di massa 2m posta nella posizione del CM
L
delle particelle 1 e 2.
x CM
2
Il centro di massa si troverà sulla congiungente:
2m 0 mL 3
3 L
2
3L
2
y CM
3m
3
6
G.M. - Edile A 2002/03