Genova 22/9/2005
Daniele Musso
Relatore: Prof. Enrico Massa
Ottica geometrica e
geometria simplettica
Gli aspetti salienti dell’ottica lineare e
dell’ottica geometrica rivisitati
utilizzando tecniche e strumenti
matematici propri della geometria
simplettica.
•
• Ottica lineare descritta con il metodo
delle matrici.
• Formulazione
Hamiltoniana
basata sul principio
variazionale di
Fermat.
William Rowan Hamilton
Ottica lineare e ottica
gaussiana
• Introduzione dell’asse ottico.
• Oggetti ottici rappresentati
matematicamente da superfici ottiche.
L’ottica lineare è una teoria classica il cui
ambito di applicazione è definito dalle
seguenti ipotesi:
• Trascurabilità del carattere ondulatorio
della radiazione elettromagnetica
• Indici di rifrazione costanti
• Ipotesi di linearità
Ulteriore ipotesi per l’ottica gaussiana:
• Ipotesi di simmetria cilindrica
Definizione del formalismo
• Caratterizzazione
dello “stato” di un
raggio mediante i due parametri q e p
variabili in z .
q
p z
in cui p n è detto momento.
• Rappresentazione della relazione fra gli
“stati” di un raggio a due quote diverse
mediante una trasformazione lineare
simplettica della coppia di parametri q e p .
q a b q
p c d p
2
1
2
• M è simplettica
1
det M 1
Sistemi ottici elementari
• Percorso in assenza di superfici ottiche
Condizione iniziale a
Condizione finale a
Pongo
z z1 :
z z2 :
q1 , p1
q2 , p2
t z2 z1
Essendo l’indice di rifrazione costante, il raggio si propaga
in maniera rettilinea, risulta pertanto:
p2 p1
t
q2 q1 t1 q1 n p1
1
Ponendo
al punto
t
T
n1
, la matrice di trasferimento dal punto
z2 assume la forma
1 T
0 1
z1
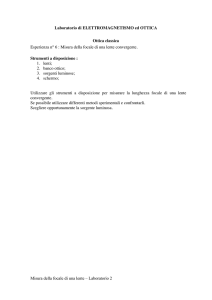
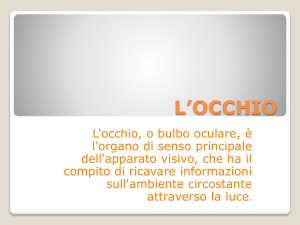
• Superficie rifrangente
Equazione della linea di separazione:
z z f q
Per l’ipotesi di simmetria cilindrica rispetto all’asse
ottico, f q è pari e f 0 0 .
A meno di termini di ordine superiore al secondo avremo
1 2
z z kq
2
Con riferimento alla figura, sotto l’ipotesi di linearità, si ottiene
kq tan
2
2
Considerando i triangoli rappresentati in figura
1 1
2
;
2 2
2
Confrontando e raccogliendo i risultati ottenuti si ricava
1 1 kq
2 2 kq
Si considera la legge di Snell linearizzata:
n11 n2 2
Utilizzando le relazioni
1 1 kq
2 2 kq
si ottiene
n11 n1kq n2 2 n2 kq
vale a dire
p2 p1 n2 n1 kq Pq
avendo definito il potere della superficie rifrangente
P n2 n1 k
q2 q1
p2 Pq1 p1
La matrice di trasferimento dal punto z1 al punto
pertanto
1 0
P 1
z2 sarà
• Il comportamento del generico sistema ottico è
determinato dagli effetti del sistema stesso
sull’evoluzione dei raggi luminosi fra z1 e z 2 , z1
z2
• Nello spazio delle variabili q e p , tale evoluzione è
descritta da una trasformazione appartenente al gruppo
Sl 2, .
• Il gruppo Sl 2, è a sua volta generato dalle
trasformazioni di tipo “elementare”
1 x
0 1
1 0
y 1
Casi Notevoli
q2 a b q1
p2 c d p1
•
b0
q2 dipende solo da q1 e non dalla direzione del raggio
stesso; i punti z1 , q1 e z 2 , q2 sono detti coniugati.
Anche i piani z z1 , z z2 sono detti coniugati poiché
formati da punti coniugati a due a due.
•
c0
p2 dipende solo da p1 e non dal punto di incidenza.
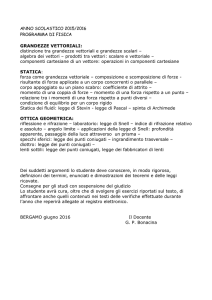
Lente sottile
Per lente sottile si intende la successione di due diottri posti
a distanza trascurabile l’uno dall’altro.
Il problema associato alla lente sottile risulta dalla
composizione di due problemi di singola superficie
rifrangente.
1 0 1
P
1
1
P2
con f
0
1
1 P1 P2
0 1
0
1 f 1 1
1
P1 P2
z2 z z z1 nf
La matrice associata al sistema in esame è
1
0
f 1
0 1
1 f 1 1 0
pertanto
f 0
1 f 1
q2 fp1
f 1
1 0
p2
f 0
1 f 1
1
q1
f
f
0
Fuochi della lente sottile
• Si considera ancora una lente sottile posta in un mezzo
rifrangente uniforme la cui matrice associata è
0 1 y 1 xf 1
a b 1 x 1
1
1
c
d
0
1
f
1
0
1
f
y xf 1 y x
1
f y 1
Si scelgono x e y in modo che
b y xf 1 y x 0
1 1 1
f x y
I piani z z1 , z z2 sono coniugati e vale la seguente
relazione
q2 aq1
viene detto fattore d’ingrandimento
x
1 1
a 1 xf 1 1 x
y
x y
Formulazione Hamiltoniana dell’ottica
gaussiana
q2 a b q1
p2 c d p1
se b 0
1
p
1 b q2 aq1
p2 1 dq2 q1
b
Introduciamo la funzione iconale
1 a
d
W q1 , q2 q12 q22 q1q2 K
b2
2
oppure
1
p2 q2 p1q1 K
W
2
q
a b q1
2
p2 c d p1
L’eq. (1.1) possono essere riscritte in termini delle
derivate parziali di W
W
p
1
q1
p2 W
q2
z1 z2 z3
Wij qi , q j : qi , pi q j , p j
la funzione iconale è additiva.
W13 W12 W23
W12
p
1
q1
p2 W12
q2
W23
p
2
q2
p3 W23
q3
da cui segue che
W12
W
23
q2
q2
Esprimendo q2 in funzione di q1 , q3 si ha
W13 q1 , q3 W12 q1 , q2 q1 , q3 W23 q2 q1 , q3 , q3
che soddisfa le seguenti relazioni
Scegliendo K Lasse la funzione iconale W coincide con il
cammino ottico
L ni li
i
• Propagazione rettilinea
L n d q2 q1
2
2
con d z2 z1
1 q2 q1 2
1n
2
nd 1
nd
q
q
2
1
2
d
2d
2
Matrice associata:
1 d
n
0 1
La funzione iconale vale pertanto
W q1 , q2
n 2
2
q1 q2 2q1q2 K
2d
identica al cammino ottico per K nd Lasse
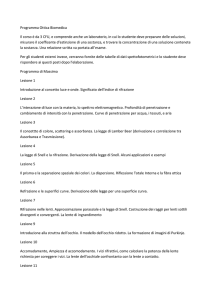
• Superficie ottica
d 2 z2 z
d1 z z1
Superficie ottica:
1
z z kq 2
2
Il cammino ottico è:
2
2
1
1
2
2
L n1 d1 kq 2 q q1 n2 d 2 kq 2 q2 q
2
2
1
1n
1 n2
2
q2 q 2
n1d1 n2 d 2 k n1 n2 q 2 1 q q1
2
2 d1
2 d2
Utilizzando le relazioni
q q1
d1
d
p1 , q2 q 2 p2
n1
n2
,
p2 p1 n1 n2 kq
si ha
L n1d1 n2 d 2
n1d1 n2 d 2
W
1
p2 p1 q 1 p1 q q1 1 p2 q2 q
2
2
2
1
p2 q2 p1q1
2
1
p2 q2 p1q1 K
2
Identica alla funzione W pur di porre K n1d1 n2d 2
Legge di Snell e principio di Fermat
d 2 z2 z
d1 z z1
Cammino ottico:
1
1n
1n
2
2
L n1d1 n2 d 2 k n1 n2 q 2 1 q q1 2 q2 q
2
2 d1
2 d2
Condizione di stazionarietà del cammino ottico:
dL
n
n
k n1 n2 q 1 q q1 2 q2 q 0
dq
d1
d2
Utilizzando le relazioni
q q1
d1
d
p1 , q2 q 2 p2
n1
n2
si ottiene la legge di Snell:
kqn1 n2 p2 p1
William Rowan Hamilton
(1805 – 1865)
Pierre Fermat
(1601 – 1665)
Carl Friedrich Gauss
(1777-1885)
Willebrord Snell
(1580 – 1626)
Claudio Tolomeo
(~ 87 – 150 A.D.)