Momento Angolare
Moti Traslatori
Conservazione della
quantità di moto!!
Moti Rotatori
p mv
per un punto
materiale
P MvCM
per un sistema
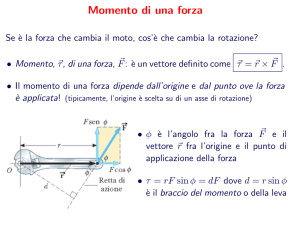
l rp
Momento angolare di una
particella rispetto ad O
Sia xy il piano individuato dai vettori r e p
| l | r p p r
O
Momento angolare
| l | rpsen r p p r
O
r
p
r braccio di p rispetto ad O ossia la distanza della
retta di azione di p rispetto ad O
2
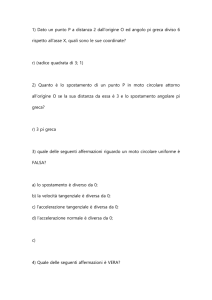
Applicazione..
Una particella di massa 13.7 g è in moto alla velocità costante di 380 m/s. La
traiettoria rettilinea della particella passa a distanza di 12 cm dall’origine. Si
calcoli il momento angolare della particella rispetto all’origine.
| l | rpsen mvh 0.62kg m 2 /s
O
h
3
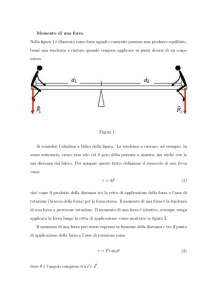
Momento angolare e torcente
l rp
dl
dt
v
dr dp
pr
dt
dt
F
dl d ( r p )
dt
dt
dl
r F
dt
mv
Il momento torcente totale rispetto al polo O delle
forze agenti sulla particella è uguale alla variazione
temporale del momento angolare della particella
calcolato rispetto allo stesso polo.
dl
dt
4
Momento angolare e torcente
Per un sistema di particelle il momento L rispetto al polo O:
N
L li
i 1
Scelto O, come origine del sistema
di riferimento cartesiano:
N
N
dli
dL
i
dt i 1 dt i 1
La variazione temporale del momento angolare di un sistema di particelle
è uguale al momento torcente totale dovuto alle forze che agiscono sulle
particelle del sistema.
5
Momento angolare e torcente
Per la III legge di Newton: il momento torcente totale delle forze
interne è nullo:
N
EXT
dL
i
dt i 1
Il momento torcente totale dovuto alle forze esterne che agiscono su un
sistema di particelle è uguale alla variazione temporale del momento
angolare di un sistema stesso, entrambi calcolati rispetto al medesimo
polo fisso nel sistema di riferimento inerziale scelto per studiare il moto.
Vale sia per un sistema di particelle che per un corpo rigido
6
Momento delle forze interne…
F2,1
r2
O
2
r1
1
F1, 2
1 2 r1 F1, 2 r2 F2,1
(r1 r2 ) F2,1 0
(r1 r2 ) // F2,1
int
int
7
Conservazione del momento angolare
Se
EXT
N
EXT
dL
i
dt i 1
dL
0 L costante
0
dt
Se il momento totale delle forze esterne agenti su un sistema di
particelle è nullo, il momento angolare tot. del sistema si conserva.
Il momento angolare di una singola particella invece può variare,
a causa delle forze interne.
Se una componente del momento torcente totale esterno è nullo
la corrispondente componente del momento angolare tot è costante.
8
Momento e velocità angolari
Consideriamo un sistema di punti materiali,
rigido, in rotazione attorno all’asse z con
velocità angolare .
Consideriamo la particella i-esima.
z
vi
P
i
P'
i
j
ri
vettore posizione
Ri
distanza dall' asse di rotazione
v i R i
modulo della velocità
i
ri m i v i
rim i v i ri m iR i
iz i cos 90 i
m i R i ri sen i
n
Lz
i1
Ri
iz
m i R2i
n
i1
i
ri
j
i
momento della quantità di moto
i
Ri
y
O
modulo del momento della quantità di moto
x
componente assiale
n
2
2
m i Ri m i R i I
i1
L e
non sono sempre paralleli
p e v si!
9
Conservazione momento angolare: applicazioni
I + grande
I + piccolo
Il momento delle forze esterne
rispetto al CM è nullo
I + grande
I + piccolo
Lz I
I + grande
10
Simmetria Assiale
L
Lz I
Due particella di stessa massa
che ruotano attorno all’asse.
L //
Un corpo rigido è simmetrico attorno ad un asse se e solo se per ciascun
elemento ne esiste un secondo di ugual massa posto alla stessa distanza dall’asse
sulla retta ad esso ortogonale passante per il punto occupato dal primo elemento.
11
Assi principali di inerzia
Corpo rigido in rotazione attorno ad un suo asse di
simmetria:
Ogni corpo per un suo punto passano almeno tre assi
(assi principali di inerzia) ortogonali tra loro
tale che quando il corpo ruota rispetto ad uno di essi:
L I
12
Corpi simmetrici e asimmetrici
La sbarra con corpi di massa m è rigidamente connessa con l’albero
centrale. Il corpo non è simmetrico rispetto all’asse di rotazione e l’asse di
rotazione non è un asse principale d’inerzia:
L non //
L’albero ruota a velocità angolare constante.
L costante in modulo
ma ruota attorna all' asse
Precede attorno all’asse
13
Corpi simmetrici e asimmetrici
dL
dt
• Il momento torcente delle forze esterne è
dovuto alle forze che i sostegni esercitano
sull’albero:
• Per mantenere i due punti materiali sulla
traiettoria circolare occorre applicare a
ciascun punto materiale una forza centripeta.
• il cui momento è ortogonale a piano
individuato da
z = 0 az costante
L e
14
Poiché
non hanno nessun altra funzione che
quella di far precedere il momento
angolare attorno all’asse di rotazione
non hanno alcuna influenza sulla
velocità angolare
Ma al tempo sottopongono a sforzi
inutili tutta la struttura (l’asse di
rotazione, i cuscinetti, etc)
Si preferisce lavorare in modo che il momento angolare sia
parallelo all’asse di rotazione (in cui tali forze non sono
richieste)
Questo si ottiene “equilibrando” il corpo rigido rispetto all’asse
di rotazione (equilibrature delle gomme dell’automobile)
15
La Trottola
Consideriamo il moto della trottola in rotazione
attorno al suo asse di simmetria.
L’asse di rotazione precede ossia si muove attorno
all’asse verticale.
r
• Il momento torcente della forza P:
P
Mgrsen
O
• perpendicolare sia all’asse di rotazione che ad L
• modifica la direzione di L, ma non il modulo:
dL dt
16
Trottola: moto di precessione
d
P
dt
d
L
O
L dL
dL
dt
d
Lsen Lsen
Mgrsen Mgr
P
Lsen
Lsen
L
La velocità angolare di precessione è inversamente
proporzionale ad L e quindi alla velocità angolare di
rotazione attorno all’asse di simmetria
17