CINEMATICA DEI CONTINUI
Si consideri un mezzo continuo i cui punti nella configurazione iniziale C,
siano riferiti alla terna cartesiana ortogonale Oxyz. Si supponga ora che
ciascun punto del corpo subisca uno spostamento caratterizzabile attraverso
le sue componenti secondo gli assi:
u = u (x, y, z),
v = v (x, y, z),
w = w (x, y, z).
(1)
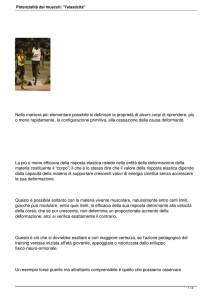
A seguito di tale movimento il punto P si trasporterà in P' ed il corpo
assumerà la nuova configurazione C’. Poichè nella trasformazione C
supporremo che non avvengano compenetrazioni e lacerazioni di materia le
funzioni di spostamento si supporranno continue, con le loro derivate prime,
in tutta la regione definita dal volume V. Si farà inoltre l’ipotesi che le u, v,
w, a meno di un eventuale moto rigido globale del corpo, siano ovunque
piccolissime ed assimilabili ad infinitesimi.
Ciò posto si consideri il generico punto P di coordinate (x0, y0, z0) e siano
u0, v0, w0 le componenti dello spostamento ad esso competente. Detto Q un
secondo punto di coordinate (x, y, z) appartenente all’intorno infinitesimo di
P e cioè tale che le quantità:
x - x0 ,
y - y0 ,
z - zo ,
possano essere considerate infinitesime, e dette u, v, w, le componenti dello
spostamento del punto P può porsi:
u
u
u
,
x
y
z
v
v
v
v v0
,
x
y
z
u u0
w w0
w
w
w
.
x
y
z
(2)
Le precedenti rappresentano lo sviluppo in serie di Taylor delle relazioni (1)
in un intorno del punto P troncato ai termini del primo ordine, essendo ξ, η, e
ζ, infinitesimi. Tali relazioni possono essere assunte quali leggi di variazioni
delle componenti dello spostamento nell’intorno infinitesimo del punto P.
Chiamiamo con M la matrice con componenti le derivate parziali delle
componenti di spostamento u, v e w:
u
x
v
M
x
w
x
u
y
v
y
w
y
u
z
v
z
w
z
In forma matriciale le (2) possono essere scritte:
U U0 M r ,
(3)
Avendo indicato con:
u
U v ,
w
u 0
U 0 v 0 ,
w
0
e
le componenti dello spostamento del punto P e del punto Q, rispettivamente
e
r ,
vettore posizione del punto Q rispetto al punto P.
La matrice M può essere decomposta in una somma di due matrici E e W
definite da:
u
1 u v
x
2 y x
1 u v
v
E
2 y x
y
1 u w 1 v w
2 z x 2 z y
u
1 u v
x
2 y x
1 u v
v
W
2 y x
y
1 u w 1 v w
2 z y
2 z x
1 u w
2 z x
1 v w
,
2 z y
w
z
1 u w
2 z x
1 v w
.
2 z y
w
z
La matrice E si chiama parte simmetrica di M mentre W parte emisimmetrica
di M.
Le 6 componenti indipendenti della matrice E sono:
xx
u
,
x
1 u v
xy yx ,
2 y x
v
,
y
1 v w
yz zy
,
2 z y
yy
1 u w
xz zx
,
2 z x
zz
w
.
z
Quindi la matrice E sarà:
xx
E yx
zx
xy
yy
zy
xz
yz ,
zz
(4’)
(4)
Con la decomposizione della matrice M = E + W, la (3) può essere scritta:
U U 0 (E W) r ,
La deformazione che subisce l’intorno di un punto può sempre pensarsi come
ottenuta per sovrapposizione di moto rigido U0, di una deformazione
rappresentata da una matrice emisimmetrica W, che rappresenta una rotazione
rigida, e di una deformazione rappresentata dalla matrice E.
Ai fini dell’analisi della deformazione, è evidente che il moto rigido di
traslazione e rotazione dell’intorno risulta essere inessenziale.
Componenti di moto rigido e componenti di deformazione
La deformazione che subisce l’intorno di un punto interno P può sempre
pensarsi come ottenuta per sovrapposizione di un moto rigido e di un moto di
deformazione pura responsabile delle variazioni di geometria dell’intorno
stesso.
U0
Wr
Er
Ai fini dell’analisi della deformazione, il moto rigido dell’intorno risulta
essere inessenziale. E’ opportuno quindi suddividere le aliquote che
competono al moto rigido da quelle di deformazione reale.
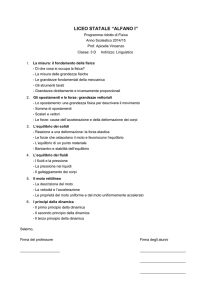
Con riferimento ad un elemento lineare infinitesimo lungo l’asse x nella
configurazione iniziale, che indichiamo con dx, di estremi l’origine O ed
il punto A avremo:
Er
O
dx
O’
A
dx
r 0 ,
0
In componenti si ha:
A’
U Er ,
u xx dx ,
v xy dx ,
w xz dx ,
La lunghezza finale risulta:
Lf
(1 xx )dx2 xy dx2 xz dx2 ,
Trascurando i termini quadratici nelle deformazioni ε si ha:
Lf 1 2e xx dx (1 e xx ) dx.
la lunghezza iniziale Li è dx, quindi ricavando la deformazione εxx:
xx
Lf Li
.
Li
εxx si definisce coefficiente di dilatazione lineare.
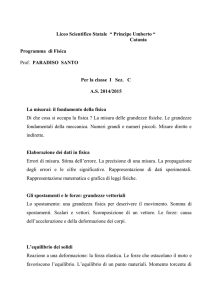
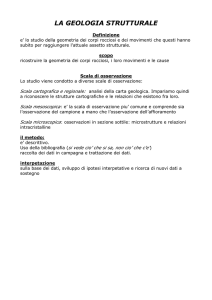
Per vedere il significato fisico dei termini ad indice diverso, assumiamo
che solo εxy sia diverso da zero. Prendiamo inoltre un elemento
infinitesimo di lati dx e dy.
y
y
B
B’
C
C’
B
dy
Er
O
dx
A
Se la deformazione è
x
0
E yx
0
A’
O O’
xy
0
0
A
x
0
0 ,
0
Il punto 0 non subisce spostamenti, il punto B si sposterà in direzione x
di (εxy dy), il punto A si sposterà in direzione y di (εxy dx) ed il punto C si
sposterà in direzione x di (εxy dy) ed in direzione y di (εxy dx).
In particolare l’angolo in O del triangolo AOA’ risulta:
tan A O A'
xy dx
dx
xy ,
Per le ipotesi fatte di deformazioni infinitesime, la tangente è approssimabile
con il valore del seno e quindi al valore dell’angolo (in radianti):
A O A' xy ,
Analogamento per l’angolo in O del triangolo BOB’ risulta:
tan B O B'
xy dy
xy ,
dy
e quindi per le ipotesi fatte di deformazioni infinitesime:
B O B' xy .
Spesso si parla di scorrimento angolare definito da:
xy xy yx ,
quindi la componente εxy del tensore di deformazione infinitesima E
rappresenta la metà dello scorrimento angolare tra le direzioni x ed y.
Quando è assegnata la deformazione mediante una terna di spostamenti u
in direzione x, v in direzione y e w in direzione z, che sono funzioni
continue con le derivate prime e monodrome è sempre possibile
determinare il tensore delle deformazioni mediante:
u
1 u v
x
2 y x
1 u v
v
E
2 y x
y
1 u w 1 v w
2 z x 2 z y
1 u w
2 z x
1 v w
,
2 z y
w
z
Ci si può chiedere se, assegnate comunque ad arbitrio le 6 deformazioni
indipendenti εxx, …, εyz pensate come le componenti di un tensore delle
deformazioni, sia possibile far loro corrispondere una deformazione
effettiva per il corpo B , ossia un campo di spostamenti a cui corrispondano
le deformazioni stesse in accordo con le relazioni spostamentideformazioni.
La riposta a tale quesito in generale è no e risiede evidentemente nella
possibilità di integrare il sistema di equazioni differenziali alle derivate
parziali. Si possono determinare delle condizioni necessarie per l’esistenza di
un campo di spostamenti in grado di individuare una corrispondenza
biunivoca tra le due situazioni di struttura deformata ed indeformata. Esse
sono state trovate per la prima volta da Saint-Venant e sono note come
equazioni esplicite di congruenza o anche come equazioni di Saint-Venant.
Osservazione:
Si può porre il seguente problema: dato il tensore di deformazione
infinitesimo E verificare se esistono una o più direzioni per le quali
accade che lo spostamento è di pura deformazione lungo la direzioni
stesse.
Si può ripetere quanto detto per le tensioni costruendo il problema agli
valori. Sempre esistono tre radici reali (eventualmente coincidenti) che
individuano le deformazioni principali in corrispondenza alle quali si
individuano tre direzioni principali di deformazione che è semplice
mostrare risultano ortogonali fra loro.
Nel caso piano è possibile costruire un cerchio di Mohr per le
deformazioni in modo simile.